
Optimizing Point Sets on Manifolds · 2018-05-08 · Sd ={x∈ Rd+1:|x| =1 ... {P ∈ Rd×k:PTP =I...
16
Point sets on Manifolds Point sets on Manifolds Manifold M, structure, distance metric Sphere S d = {x ∈ R d+1 : |x| =1} Grassmann G k,d = {P ∈ R d×d : P T = P,P 2 = P, rank(P )= k} = {P ∈ R d×d : P = QQ T ,Q ∈ R d×k ,Q T Q = I k } Stiefel {P ∈ R d×k : P T P = I k } Point set X N = {x 1 ,..., x N }⊂M (Rob Womersley) Optimizing Point Sets on Manifolds ICERM sp18 1 / 16
Transcript of Optimizing Point Sets on Manifolds · 2018-05-08 · Sd ={x∈ Rd+1:|x| =1 ... {P ∈ Rd×k:PTP =I...

Point sets on Manifolds
Point sets on Manifolds
Manifold M, structure, distance metric
SphereSd = {x ∈ R
d+1 : |x| = 1}Grassmann
Gk,d = {P ∈ Rd×d : P T = P,P 2 = P, rank(P ) = k}
= {P ∈ Rd×d : P = QQT , Q ∈ R
d×k, QTQ = Ik}
Stiefel{P ∈ R
d×k : P TP = Ik}
Point setXN = {x1, . . . ,xN} ⊂ M
(Rob Womersley) Optimizing Point Sets on Manifolds ICERM sp18 1 / 16

Purpose/Optimization criteria
Quadrature (numerical integration)
Quadrature (numerical integration)
N∑
i=1
wif(xi) ≈∫
Mf(x)dσ(x)
Exact for polynomials of degree ≤ t
t-designs: equal weight rule exact for polynomials of degree ≤ t
Worst case error in a (Sobolev) space Hs, smoothness index s
WCE(XN , w,Hs) := sup‖f‖Hs
≤1
∣
∣
∣
∣
∣
N∑
i=1
wif(xi)−∫
Mf(x)dσ(x)
∣
∣
∣
∣
∣
(Rob Womersley) Optimizing Point Sets on Manifolds ICERM sp18 2 / 16

Purpose/Optimization criteria
Minimal energy
Energy/Distance
Riesz s-energy, s > 0
Es(XN ) :=∑
i<j
1
|xi − xj|s
Log energy
E0(XN ) :=∑
i<j
log1
|xi − xj|
Distance (maximize)
D(XN ) :=∑
i<j
|xi − xj|
(Rob Womersley) Optimizing Point Sets on Manifolds ICERM sp18 3 / 16

Purpose/Optimization criteria
Geometry: Packing and covering
Choose points XN ⊂ M:
Packing: Maximizemini<j
|xi − xj |
Covering: Minimize
maxx∈M
mini=1,...,N
|x− xi|
(Rob Womersley) Optimizing Point Sets on Manifolds ICERM sp18 4 / 16

Purpose/Optimization criteria
Approximation
Interpolation by polynomials or other basis functions
Needlets
Radial Basis Functions (RBF)
Sparsity
...
(Rob Womersley) Optimizing Point Sets on Manifolds ICERM sp18 5 / 16

Purpose/Optimization criteria
Good point sets
Finding/proving global optimal very hard
Good point sets – compare to
Asymptotic estimatesLower bounds...
(Rob Womersley) Optimizing Point Sets on Manifolds ICERM sp18 6 / 16

Purpose/Optimization criteria
Example: S2, Coulomb (s = 1) energy, C1
C1 =(
E1 − 1
2N2
)
/N3/2, Asymptotic limit (KS) c1 ≈ −0.553051293
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000
Number of points N
-0.554
-0.552
-0.55
-0.548
-0.546
-0.544
-0.542
-0.54
-0.538c1 = (pe - 0.5 N
2) / N
3/2
Low Coulomb energy points
Asymptotic limit -0.55305129
(Rob Womersley) Optimizing Point Sets on Manifolds ICERM sp18 7 / 16

Purpose/Optimization criteria
Example: S2, Coulomb, C1 for ME, EA, SB points
Compared to fast point sets
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000
Number of points N
-0.555
-0.55
-0.545
-0.54
-0.535
-0.53
-0.525
-0.52c1 = (pe - 0.5 N
2) / N
3/2
Low Coulomb energy points
Equal area points
Generalized spiral points
Asymptotic limit -0.55305129
(Rob Womersley) Optimizing Point Sets on Manifolds ICERM sp18 8 / 16

Purpose/Optimization criteria
Example: S2, Coulomb (s = 1) energy, C2
C2 =(
E1 − 1
2N2 − c1N
3/2)
/(N log(N))
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000
Number of points N
0.002
0.004
0.006
0.008
0.01
0.012
0.014
0.016
0.018
0.02c2L = (pe - 0.5 N
2 - c1a N
3/2) / (N log(N)), c1a = -5.53051293e-01
Low Coulomb energy points
(Rob Womersley) Optimizing Point Sets on Manifolds ICERM sp18 9 / 16

Purpose/Optimization criteria
Example: S2, Coulomb (s = 1) energy, C2 details
C2 =(
E1 − 1
2N2 − c1N
3/2)
/(N log(N))
0 200 400 600 800 1000 1200 1400 1600 1800 2000
Number of points N
2
2.5
3
3.5
4
4.5
510
-3c2L = (pe - 0.5 N2 - c1a N
3/2) / (N log(N)), c1a = -5.53051293e-01
Low Coulomb energy points
(Rob Womersley) Optimizing Point Sets on Manifolds ICERM sp18 10 / 16

Purpose/Optimization criteria
Example: S2, Coulomb energy, Voronoi cells
0 200 400 600 800 1000 1200 1400 1600 1800 2000
Number of points N
0
200
400
600
800
1000
1200
1400
1600
1800
2000Voronoi cells for ME points
Triangles
Quadrilaterals
Pentagons
Hexagons
Heptagons
Octagons
(Rob Womersley) Optimizing Point Sets on Manifolds ICERM sp18 11 / 16

Purpose/Optimization criteria
Example: S2, N = 2000
CCD 1950575.6389387 ME 1950575.503582
(Rob Womersley) Optimizing Point Sets on Manifolds ICERM sp18 12 / 16
Purpose/Optimization criteria
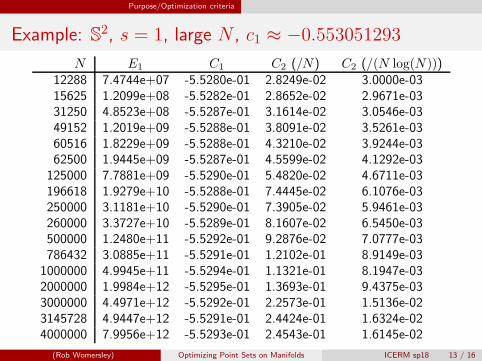
Example: S2, s = 1, large N , c1 ≈ −0.553051293
N E1 C1 C2 (/N) C2 (/(N log(N)))12288 7.4744e+07 -5.5280e-01 2.8249e-02 3.0000e-0315625 1.2099e+08 -5.5282e-01 2.8652e-02 2.9671e-0331250 4.8523e+08 -5.5287e-01 3.1614e-02 3.0546e-0349152 1.2019e+09 -5.5288e-01 3.8091e-02 3.5261e-0360516 1.8229e+09 -5.5288e-01 4.3210e-02 3.9244e-0362500 1.9445e+09 -5.5287e-01 4.5599e-02 4.1292e-03
125000 7.7881e+09 -5.5290e-01 5.4820e-02 4.6711e-03196618 1.9279e+10 -5.5288e-01 7.4445e-02 6.1076e-03250000 3.1181e+10 -5.5290e-01 7.3905e-02 5.9461e-03260000 3.3727e+10 -5.5289e-01 8.1607e-02 6.5450e-03500000 1.2480e+11 -5.5292e-01 9.2876e-02 7.0777e-03786432 3.0885e+11 -5.5291e-01 1.2102e-01 8.9149e-031000000 4.9945e+11 -5.5294e-01 1.1321e-01 8.1947e-032000000 1.9984e+12 -5.5295e-01 1.3693e-01 9.4375e-033000000 4.4971e+12 -5.5292e-01 2.2573e-01 1.5136e-023145728 4.9447e+12 -5.5291e-01 2.4424e-01 1.6324e-024000000 7.9956e+12 -5.5293e-01 2.4543e-01 1.6145e-02
(Rob Womersley) Optimizing Point Sets on Manifolds ICERM sp18 13 / 16

Purpose/Optimization criteria
Example: S2, Log energy
C2 =(
E0 − c0N2 + c1N log(N)
)
/N , c0 =1
2− log(2), c1 =
1
2,
Asymptotic limit (BHS): c2 ≈ −0.0556053
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000
Number of points N
-0.06
-0.05
-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04
ML points
BHS limit -0.055605
(Rob Womersley) Optimizing Point Sets on Manifolds ICERM sp18 14 / 16

Purpose/Optimization criteria
Example: S2, Log energy, C3
C3 =(
E0 − c0N2 + c1N log(N)− c2N
)
/(√N log(N))
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000
Number of points N
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
0.2
ML points
(Rob Womersley) Optimizing Point Sets on Manifolds ICERM sp18 15 / 16

Purpose/Optimization criteria
Example: S2, Log energy. C3 details
C3 =(
E0 − c0N2 + c1N log(N)− c∞2 N
)
/(√N log(N))
0 200 400 600 800 1000 1200 1400 1600 1800 2000
Number of points N
0.008
0.01
0.012
0.014
0.016
0.018
0.02
0.022
0.024
ML points
(Rob Womersley) Optimizing Point Sets on Manifolds ICERM sp18 16 / 16








![...and assume for all ε∈ (0,1], d∈ N, x∈ Rd that (Rφε,d) ∈ C(Rd,R), |(Rφε,d)(x)|+k(∇(Rφε,d))(x)k ≤ cdc(1+kxkc), (1) and P(φε,d) ≤ cdcε−c , |ϕd ...](https://static.fdocuments.in/doc/165x107/5f646115eb3a0544e904a4d5/-and-assume-for-all-a-01-da-n-xa-rd-that-rd-a-crdr.jpg)









