
OPTIMASI WAKTU PRODUKSI DAN ANALISIS KEPERIODIKAN … · be determined by making the maximum value...
204
i OPTIMASI WAKTU PRODUKSI DAN ANALISIS KEPERIODIKAN PADA GRAF SISTEM PRODUKSI BER-LOOP DENGAN MENGGUNAKAN SISTEM PERSAMAAN LINEAR ALJABAR MAX-PLUS SKRIPSI Diajukan untuk Memenuhi Salah Satu Syarat Memperoleh Gelar Sarjana Pendidikan Program Studi Pendidikan Matematika Oleh : LUCIA WINDA CESARI NIM : 121414131 PROGRAM STUDI PENDIDIKAN MATEMATIKA JURUSAN PENDIDIKANMATEMATIKA DAN ILMU PENGETAHUAN ALAM FAKULTAS KEGURUAN DAN ILMU PENDIDIKAN UNIVERSITAS SANATA DHARMA YOGYAKARTA 2016 PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
Transcript of OPTIMASI WAKTU PRODUKSI DAN ANALISIS KEPERIODIKAN … · be determined by making the maximum value...
i
OPTIMASI WAKTU PRODUKSI DAN ANALISIS KEPERIODIKAN
PADA GRAF SISTEM PRODUKSI BER-LOOP DENGAN
MENGGUNAKAN SISTEM PERSAMAAN LINEAR
ALJABAR MAX-PLUS
SKRIPSI
Diajukan untuk Memenuhi Salah Satu Syarat
Memperoleh Gelar Sarjana Pendidikan
Program Studi Pendidikan Matematika
Oleh :
LUCIA WINDA CESARI
NIM : 121414131
PROGRAM STUDI PENDIDIKAN MATEMATIKA
JURUSAN PENDIDIKANMATEMATIKA DAN ILMU PENGETAHUAN ALAM
FAKULTAS KEGURUAN DAN ILMU PENDIDIKAN
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
2016
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

ii
SKRIPSI
OPTIMASI WAKTU PRODUKSI DAN ANALISIS KEPERIODIKAN
PADA GRAF SISTEM PRODUKSI BER-LOOP DENGAN
MENGGUNAKAN SISTEM PERSAMAAN LINEAR
ALJABAR MAX-PLUS
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
iii
SKRIPSI
OPTIMASI WAKTU PRODUKSI DAN ANALISIS KEPERIODIKAN
PADA GRAF SISTEM PRODUKSI BER-LOOP DENGAN
MENGGUNAKAN SISTEM PERSAMAAN LINEAR
ALJABAR MAX-PLUS
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

iv
HALAMAN PERSEMBAHAN
“Ia membuat segala sesuatu indah pada waktunya, bahkan Ia
memberikan kekekalan dalam hati mereka...”
(Pengkhotbah, 3 : 11)
Karya ini kupersembahkan untuk :
Tuhan Yesus yang senantiasa membimbing dan menyertaiku.
Bapakku Valentinus Susanto dan Ibuku Veronika Jumiyem.
Kakak pertamaku, Felix Santi Wedanti.
Kakak keduaku, drh. Bibiana Krisanti dan suami.
Keponakanku Cyrilla Diandra Kinarian Putri Nugraha.
My Best Partner Ever David Hantoro.
Rohkat-kris SMA N 1 Yogyakarta : Silvi, Winda, Ndari, Kiky, dan
semua rohkat-kris yang selalu memberi dukungan dan semangat.
Kawan, saudara, serta sahabat seperjuangan di Pendidikan
Matematika Edith, Riris, Grace, Dennis, Dedy, Anton.
Almamaterku, Universitas Sanata Dharma.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

v
PERNYATAAN KEASLIAN KARYA
Saya menyatakan dengan sesungguhnya bahwa skripsi yang saya tulis ini tidak
memuat karya atau bagian karya orang lain, kecuali yang telah disebutkan dalam
kutipan dan daftar pustaka, sebagaimana layaknya karya ilmiah.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

vi
LEMBAR PERNYATAAN PERSETUJUAN PUBLIKASI KARYA ILMIAH
UNTUK KEPENTINGAN AKADEMIS
Yang bertanda tangan di bawah ini saya mahasiswa Universitas Sanata Dharma:
Nama : Lucia Winda Cesari
Nomor Mahasiswa : 121414131
Demi perkembangan ilmu pengetahuan saya memberikan kepada Perpustakaan
Universitas Sanata Dharma karya ilmiah saya yang berjudul:
OPTIMASI WAKTU PRODUKSI DAN ANALISIS KEPERIODIKAN
PADA GRAF SISTEM PRODUKSI BER-LOOP DENGAN
MENGGUNAKAN SISTEM PERSAMAAN LINEAR
ALJABAR MAX-PLUS
Dengan demikian, saya memberikan kepada Perpustakaan Universitas Sanata
Dharma hak untuk menyimpan, mengalihkan dalam bentuk media lain,
mengolahnya dalam pangkalan data, mendistribusikan secara terbatas, dan
mempublikasikannya di internet atau media lain untuk kepentingan akademis
tanpa perlu meminta izin kepada saya atau memberikan royalti pada saya selama
masih tetap mencantumkan nama saya sebagai penulis.
Demikian pernyataan ini yang saya buat dengan sebenarnya.
Yogyakarta, 31 Agustus 2016
Yang menyatakan
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

vii
ABSTRAK
Lucia Winda Cesari, 2016. Optimasi Waktu Produksi dan Analisis
Keperiodikan pada Graf Sistem Produksi Ber-Loop dengan Menggunakan
Sistem Persamaan Linear Aljabar Max-plus. Skripsi. Program Studi
Pendidikan Matematika, Jurusan Pendidikan Matematika dan Ilmu
Pengetahuan Alam, Fakultas Keguruan dan Ilmu Pendidikan, Universitas
Sanata Dharma.
Penelitian ini bertujuan untuk mengkaji persamaan pada graf sistem
produksi ber-loop serta analisis keperiodikannya dengan menggunakan sistem
persamaan linear aljabar max-plus. Penelitian diawali dengan membuat graf
sistem produksi modifikasi sesuai dengan banyaknya loop yang ada pada graf
produksi. Selanjutnya disusun aturan sinkronisasi yang sesuai dengan graf
modifikasi serta pemodelan sistem persamaan linear sesuai dengan aturan
sinkronisasi yang ada. Langkah berikutnya adalah membahas penjadwalan
periodik dari barisan keadaan sistem dan output berdasarkan pada sistem
persamaan linear aljabar max-plus.
Hasil penelitian ini menunjukkan bahwa graf sistem produksi ber-loop
dapat disajikan dalam suatu graf modifikasi dengan penambahan unit pemrosesan
sesuai banyaknya loop. Dari perhitungan barisan keadaan sistem dan output pada
graf sistem produksi ber-loop, barisan input paling lambat dapat ditentukan
dengan menjadikan nilai maksimum waktu pemrosesan pada unit-unit pemrosesan
yang memulai pemrosesan secara langsung tanpa menunggu unit pemrosesan lain
sebagai input pertama. Barisan input selanjutnya ditentukan secara periodik
dengan periode sebesar yang merupakan nilai eigen maksimum matriks A. Hal
ini membuat barisan keadaan sistem dan output yang terbentuk menjadi periodik.
Kata Kunci : Sistem Persamaan Linear Aljabar Max-plus, Loop, Sistem Produksi,
Optimasi, Periodik
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

viii
ABSTRACT
Lucia Winda Cesari, 2016. Optimization of Production Time and Periodicity
Analysis in a Production System Graph with Loop Using Linear Equation
System in Max-Plus Algebra. Thesis. Mathematic Education Study
Program, Mathematic and Science Education Department, Faculty of
Teacher Training and Education, Sanata Dharma University, Yogyakarta.
This research aims to study about the equation of production system
graph with loop and periodicity analysis using linear equations system in max-
plus algebra. This research is started by making modification production system
graphs based on the number of loops that exist in the production graph. Then,
arranging the synchronization rules based on graph modification and making the
mathematic model of linear equations system based on the existing
synchronization. The next step is discussing the periodic schedule of the state and
output of the system based on a linear equations system in max-plus algebra.
The results of this research indicate that graph with loop in production
system can be presented in a modification graph by the addition of the processing
unit according to the number of the loops. From the calculation of the state and
outputs on a production system graph with loop, the slowest input sequence can
be determined by making the maximum value of processing time on the
processing units as the first input. The maximum value of processing time on the
processing units are based on the process that start immediately without waiting
for another processing unit. The following input rows are determined periodically
with a period of λ which is the maximum eigen value of A. This makes the state
and output of the system rows formed to be periodic.
Keywords: Linear Equations System in Max-plus Algebra, Loop, Production
Systems, Optimization, Periodic
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

ix
KATA PENGANTAR
Puji dan syukur penulis ucapkan kepada Tuhan Yang Maha Esa karena
atas berkat dan rahmatNya penulis dapat menyelesaikan skripsi dengan judul
“Optimasi Waktu Produksi dan Analisis Keperiodikan pada Graf Sistem Produksi
Ber-Loop dengan Menggunakan Sistem Persamaan Linear Aljabar Max-Plus”
dengan baik. Skripsi ini disusun sebagai salah satu syarat memperoleh gelar
sarjana pendidikan pada Program Studi Pendidikan Matematika, Jurusan
Pendidikan Matematika dan Ilmu Pengetahuan Alam, Fakultas Keguruan dan
Ilmu Pendidikan, Universitas Sanata Dharma.
Berbagai hambatan dan rintangan telah penulis hadapi selama penulisan
skripsi ini, namun berkat bantuan doa, dukungan, serta motivasi dari semua pihak,
penulis dapat menyelesaikan skripsi ini. Oleh karena itu, penulis ingin
mengucapkan terima kasih kepada :
1. Bapak Rohandi, Ph.D selaku Dekan Fakultas Keguruan dan Ilmu Pendidikan.
2. Dr. Hongki Julie, M.Si selaku Ketua Program Studi Pendidikan Matematika.
3. Dr. M. Andy Rudhito, S.Pd selaku dosen pembimbing skripsi yang telah
berkenan meluangkan waktu, tenaga, serta pikiran untuk membimbing
penulis dengan penuh kesabaran selama penulisan skripsi.
4. Prof. Dr. St. Suwarsono selaku dosen pembimbing akademik yang telah
membantu dan membimbing penulis terutama berkaitan dengan hal akademis
selama penulis menempuh kuliah di Program Studi Pendidikan Matematika
Universitas Sanata Dharma.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

x
5. Bapak dan Ibu Dosen Program Studi Pendidikan Matematika yang telah
membimbing dan mendidik penulis selama menuntut ilmu di Program Studi
Pendidikan Matematika Universitas Sanata Dharma.
6. Ibu Wasilah selaku pemilik pabrik kue yang telah memberikan izin dan
kesempatan kepada penulis untuk melakukan observasi.
7. Kedua orang tuaku, Bapak Valentinus Susanto dan Veronika Jumiyem yang
senantiasa memberikan kasih sayang yang tak ternilai serta dukungan baik
moral maupun finansial.
8. Kakak-kakakku, Felix Santi Wedanti, drh. Bibiana Krisanti beserta suami,
Bonaventura Jiwantara Adhi N serta keponakanku Cyrilla Diandra Kinarian
Putri Nugraha yang selalu memberikan dorongan, motivasi dan penghiburan
kepada penulis.
9. Mas David Hantoro yang senantiasa memberikan perhatian, dukungan,
kesabaran, serta motivasi yang begitu besar sehingga penulis dapat
menyelesaikan skripsi ini.
10. Kakak-kakak serta sahabat-sahabatku di Rohkat-kris SMA N 1 Yogyakarta,
Silvia Rina Primasari, Rosaliani Windawati, Monica Kuswandari HP, Rizky
Cynthia Putri, serta rohkaters semua yang telah memberikan semangat yang
luar biasa besar kepada penulis.
11. Sahabat-sahabatku Edith Avendita Asa, Grace Nindita, Riris Ayu, Dennis
Meilky La’lang, Dedy Lucky, Antonius Doni yang telah memberikan
dukungan, motivasi, serta menemani dalam suka duka selama menempuh
kuliah di Program Studi Pendidikan Matematika.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

xi
12. Teman – teman seperjuangan di Program Studi Pendidikan Matematika 2012,
khususnya kelas C yang telah berbagi pengalaman selama penulis kuliah di
Universitas Sanata Dharma.
13. Rekan-rekan di UKM Pengabdian Masyarakat khususnya pengurus UKM
Pengabdian Masyarakat periode 2013-2014 yang telah berbagi pengalaman
yang tak ternilai melalui dinamika kepanitiaan serta pelaksanaan program-
program UKM selama penulis kuliah di Universitas Sanata Dharma.
14. Semua pihak yang telah membantu penulis menyelesaikan tugas akhir ini
baik secara langsung maupun tidak langsung yang tidak dapat penulis
sebutkan satu persatu.
Penulis menyadari bahwa masih banyak kekurangan dalam penulisan
skripsi ini. Oleh karena itu penulis mengharapkan kritik dan saran yang
membangun demi kesempurnaan tulisan ini. Semoga tulisan ini dapat bermanfaat
dan memberikan wawasan bagi setiap pembaca.
Yogyakarta, 31 Agustus 2016
Penulis
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

xii
DAFTAR ISI
Halaman
HALAMAN JUDUL ................................................................................................ i
HALAMAN PERSETUJUAN ................................................................................ ii
HALAMAN PENGESAHAN ................................................................................ iii
HALAMAN PERSEMBAHAN ............................................................................ iii
PERNYATAAN KEASLIAN KARYA ................................................................. v
LEMBAR PERNYATAAN PERSETUJUAN PUBLIKASI KARYA ILMIAH .. vi
ABSTRAK ............................................................................................................ vii
ABSTRACT ......................................................................................................... viii
KATA PENGANTAR ........................................................................................... ix
DAFTAR ISI ......................................................................................................... xii
DAFTAR TABEL ................................................................................................ xiv
DAFTAR GAMBAR ............................................................................................ xv
DAFTAR LAMPIRAN ........................................................................................ xvi
DAFTAR SIMBOL ............................................................................................. xvii
BAB I PENDAHULUAN ....................................................................................... 1
A. Latar Belakang ............................................................................................. 1
B. Kajian Pustaka .............................................................................................. 4
C. Rumusan Masalah ........................................................................................ 5
D. Pembatasan Masalah .................................................................................... 5
E. Batasan Istilah .............................................................................................. 6
F. Tujuan Penelitian ......................................................................................... 7
G. Manfaat Penelitian ....................................................................................... 7
H. Metode Penelitian......................................................................................... 8
I. Sistematika Penulisan .................................................................................. 9
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

xiii
BAB II LANDASAN TEORI ............................................................................... 12
A. Optimasi ..................................................................................................... 12
B. Definisi dan Sifat-sifat Aljabar Max-plus .................................................. 12
C. Matriks dan Vektor dalam Aljabar Max-plus............................................. 16
D. Teori Graf dalam Aljabar Max-plus ........................................................... 26
E. Sistem Persamaan Linear dalam Aljabar Max-plus ................................... 27
F. Penerapan Aljabar Max-plus dalam Sistem Linear Max-plus Waktu
Invarian dan Sistem Produksi Sederhana .......................................................... 37
BAB III PEMODELAN WAKTU PRODUKSI DENGAN MENGGUNAKAN
SISTEM PERSAMAAN LINEAR ALJABAR MAX-PLUS PADA GRAF
SISTEM PRODUKSI BER-LOOP ....................................................................... 57
A. Loop Tunggal ............................................................................................. 58
B. Loop Berganda (Multi Loop) ...................................................................... 66
C. Loop Berganda dengan Banyak Titik (Multi Loop Multi Vertex) .............. 76
D. Analisis Model ......................................................................................... 113
BAB IV ANALISIS WAKTU OPTIMUM DAN PENJADWALAN PRODUKSI
SECARA PERIODIK ......................................................................................... 119
A. Analisis Barisan Keadaan Sistem dan Output .......................................... 119
B. Penjadwalan Produksi Secara Periodik .................................................... 129
C. Keterbatasan Penelitian ............................................................................ 131
BAB V KESIMPULAN DAN SARAN .............................................................. 132
A. KESIMPULAN ........................................................................................ 132
B. SARAN .................................................................................................... 133
DAFTAR PUSTAKA ......................................................................................... 135
LAMPIRAN ........................................................................................................ 136
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

xiv
DAFTAR TABEL
Tabel 3.1 Waktu Transfer Graf Sistem Produksi Loop Tunggal........................ 60
Tabel 3.2 Waktu Pemrosesan Graf Sistem Produksi Loop Tunggal.................. 60
Tabel 3.3 Waktu Transfer Graf Sistem Produksi Loop Berganda...................... 68
Tabel 3.4 Waktu Pemrosesan Graf Sistem Produksi Loop Berganda................ 68
Tabel 3.5 Waktu Transfer Graf Sistem Produksi Multi Loop Multi Vertex........ 81
Tabel 3.6 Waktu Pemrosesan Graf Sistem Produksi Multi Loop Multi Vertex.. 81
Tabel 3.7 Matriks A Graf Multi Loop Multi Vertex Kolom 1-13....................... 110
Tabel 3.8 Matriks A Graf Multi Loop Multi Vertex Kolom 14-27..................... 111
Tabel 3.9 Matriks B Graf Multi Loop Multi Vertex............................................ 112
Tabel 3.10 Matriks C Graf Multi Loop Multi Vertex............................................ 112
Tabel 4.1 Barisan Keadaan Sistem dan Output Graf Sistem Produksi Loop
Tunggal...............................................................................................
120
Tabel 4.2 Barisan Keadaan Sistem dan Output pada Graf Sistem Produksi
Loop Tunggal dengan Input Paling Lambat ......................................
121
Tabel 4.3 Barisan Keadaan Sistem dan Output pada Graf Sistem Produksi
Multi Loop dengan Input Paling Lambat ..........................................
121
Tabel 4.4 Barisan Keadaan Sistem dan Output pada Graf Sistem Produksi
Multi Loop Multi Vertex dengan Input Paling Lambat.......................
122
Tabel 4.5 Jadwal Produksi Kue Secara Periodik ............................................... 129
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

xv
DAFTAR GAMBAR
Gambar 2.1 Contoh Sistem Produksi Sederhana................................................. 38
Gambar 2.2 List Program MATLAB Input-Output SLMI.................................... 48
Gambar 2.3 List Program MATLAB Optimasi Input-Output SLMI..................... 50
Gambar 2.4 List Program MATLAB Nilai Eigen Maksimum.............................. 54
Gambar 3.1 Graf Sistem Produksi Loop Tunggal................................................ 58
Gambar 3.2 Graf Sistem Produksi Modifikasi Loop Tunggal ............................ 59
Gambar 3.3 Graf Sistem Produksi Loop Berganda ............................................. 66
Gambar 3.4 Graf Sistem Produksi Modifikasi Loop Berganda .......................... 67
Gambar 3.5 Graf Sistem Produksi Multi Loop Multi Vertex............................... 76
Gambar 3.6 Graf Sistem Produksi Modifikasi Multi Loop Multi Vertex............. 78
Gambar 3.7 Graf Sistem Produksi dengan n Loop............................................... 117
Gambar 3.8 Graf Sistem Produksi Modifikasi dengan n Loop pada Loop
Pertama ............................................................................................
117
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

xvi
DAFTAR LAMPIRAN
1. Hasil Perhitungan MATLAB untuk Contoh 1............................................... L.1
2. Hasil Perhitungan MATLAB untuk Contoh 2............................................... L.2
3. Hasil Perhitungan MATLAB untuk Contoh 3............................................... L.3
4. Foto Penelitian ............................................................................................ L.4
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

xvii
DAFTAR SIMBOL
: himpunan tak kosong yang dilengkapi dengan dua operasi biner
dan
: himpunan semua bilangan real
:
:
: operasi max
: operasi plus
:
: { [ ]|
: [ |
: relasi “lebih kecil atau sama dengan” dalam aljabar max-plus
: nilai eigen maksimum
: tanda akhir pembuktian
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

1
BAB I
PENDAHULUAN
A. Latar Belakang
Aljabar merupakan cabang ilmu matematika yang mempelajari konsep
atau prinsip penyederhanaan serta pemecahan masalah dengan menggunakan
simbol atau huruf tertentu. Salah satu ruang lingkup dalam aljabar yang
dinilai baru adalah aljabar max-plus. Aljabar max-plus muncul sekitar tahun
1950 dan berkembang dengan pesat pada tahun 90’an.
Aljabar max-plus merupakan suatu struktur aljabar yang semesta
pembicaraannya merupakan gabungan dari himpunan bilangan real dan
negatif tak terhingga . Aljabar max-plus dilengkapi dengan
operasi maksimum yang dinotasikan dengan , dan operasi penjumlahan
dinotasikan dengan . dapat dinotasikan sebagai , dengan
merupakan Elemen merupakan elemen netral pada operasi dan 0
merupakan elemen identitas pada operasi . Selanjutnya,
dinotasikan dengan
Aljabar max-plus ( merupakan semiring komutatif yang
sekaligus idempoten sebab untuk setiap berlaku
dan (Subiono, 2013).
Selain itu, aljabar max-plus juga merupakan semifield sebab untuk setiap
memiliki invers yaitu – , sehingga berlaku
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

2
Dalam penerapannya, aljabar max-plus dapat membantu memodelkan
ataupun menyelesaikan suatu permasalahan dalam jaringan (teori graf) yang
berkaitan dengan masalah sinkronisasi. Aplikasi aljabar max-plus dapat
dijumpai dalam penjadwalan penerbangan pesawat di bandara, penjadwalan
keberangkatan kereta api, menentukan jalur tercepat, model sistem antrian,
maupun dalam sistem produksi sederhana.
Secara khusus dalam penelitian ini, penulis menggunakan sistem
persamaan linear dalam aljabar max-plus untuk menghitung waktu optimum
dalam sistem produksi sederhana. Dalam masalah pemodelan dan optimasi
suatu sistem produksi, terdapat waktu aktivitas yang belum diketahui. Hal ini
misalkan karena sistem produksi masih pada tahap perancangan, data-data
mengenai waktu aktivitas belum diketahui secara pasti maupun distribusinya.
Waktu aktivitas ini dapat diperkirakan berdasarkan pengalaman, pendapat
para ahli maupun operator sistem produksi tersebut. Untuk itu waktu aktivitas
sistem produksi dimodelkan dalam suatu waktu, yang disebut waktu aktivitas
(Rudhito, 2003).
Aljabar max-plus dapat digunakan untuk menggambarkan secara
linear dinamika waktu dari suatu sistem non-linear dalam aljabar
konvensional, sehingga pembahasan menjadi lebih mudah (Kasie G. Farlow,
2009:11). Pendekatan aljabar max-plus berguna untuk menentukan dan
menganalisis berbagai sifat sistem, tetapi pendekatan hanya dapat diterapkan
pada sebagian sistem kejadian diskrit (SKD). Sistem kejadian diskrit selalu
dipengaruhi oleh waktu. Setiap waktu bertambah pasti keadaan sistem akan
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

3
berubah pula. Tujuan dari sistem kejadian diskrit (SKD) dapat dijabarkan
menggunakan model Sistem Linear Max-plus Invarian sebagai berikut.
Optimasi waktu dalam sistem produksi sederhana akan memberikan
dampak positif bagi produsen dan konsumen. Produsen memiliki pedoman
waktu yang optimal untuk memproduksi barang sehingga proses produksi
barang akan menjadi lebih efektif. Di sisi lain, konsumen akan diuntungkan
dengan mengetahui waktu pengambilan barang jadi, sehingga tidak perlu
direpotkan dengan keterlambatan.
Pada penelitian ini akan dihitung waktu optimum produksi dari suatu
graf sistem produksi ber-loop dengan menggunakan sistem persamaan linear
aljabar max-plus waktu invarian, serta dibuat penjadwalan aktivitas produksi
secara periodik. Pemilihan graf sistem produksi ber-loop terinspirasi dari
pengamatan yang dilakukan penulis ke sebuah pabrik pembuatan kue. Proses
pembuatan kue yang dialami membutuhkan beberapa kali pemrosesan untuk
beberapa mesin dalam satu kali produksi. Dengan kata lain dalam satu
periode produksi, satu mesin dapat bekerja lebih dari satu pemrosesan. Hal ini
berkaitan dengan kapasitas mesin dalam mengolah bahan. Proses produksi
yang mengharuskan beberapa mesin bekerja lebih dari satu kali untuk setiap
satu kali produksi membuat graf yang terbentuk memiliki beberapa loop pada
beberapa mesin. Selain itu, berdasarkan hasil observasi yang dilakukan masih
ditemui beberapa masalah terkait penjadwalan produksi. Proses produksi
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

4
belum terjadwal secara periodik sehingga waktu produksi menjadi kurang
efektif. Permasalahan nyata dalam produksi kue yang ditemui ini membuat
penulis tertarik untuk membuat penjadwalan yang relevan dengan kondisi
produksi.
B. Kajian Pustaka
Dalam penelitian ini penulis memaparkan dua penelitian terdahulu
yang relevan dengan optimasi waktu produksi pada graf ber-loop dan
penjadwalan produksi secara periodik dalam aljabar max-plus.
Mustofa Arifin (2012) memaparkan tentang optimasi waktu produksi
Bakpia Pathok Jaya “25” dengan menggunakan sistem persamaan linear max-
plus waktu invarian dan penjadwalan produksinya. Proses produksi dengan
15 unit pemrosesan disajikans dalam suatu graf produksi tanpa loop.
Perhitungan dilakukan dengan bantuan aplikasi MATLAB program
maxio untuk menentukan barisan output dari sistem produksi dan maxioopt
untuk menentukan waktu minimum dan maksimum memulai produksi.
Barisan output yang merupakan hasil dari program maxio digunakan sebagai
acuan pembuatan jadwal produksi, sedangkan hasil dari program maxioopt
sebagai acuan penentuan batas mulai produksi dan pengambilan barang jadi.
Produsen dapat menentukan waktu mulai produksi dengan memilih diantara
atau sehingga waktu penyelesaian produk atau mendekati waktu
pengambilan pemesanan yang telah ditentukan oleh konsumen. Produsen
dapat memilih atau (subpenyelesaian terbesar SLMI pada sistem produksi
ini) agar dapat mengoptimalkan waktu produksi Bakpia Pathok Jaya “25”
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

5
sehingga hasil produksi dapat memenuhi permintaan konsumen dan pesanan
bakpia juga dapat dilayani tepat waktu.
Subiono dan Nur Sofianah (2009) memaparkan tentang penjadwalan
suatu produksi secara periodik dengan menggunakan aljabar max-plus. Nilai
eigen matriks A dari persamaan awal dijadikan sebagai acuan untuk membuat
persamaan baru yang membuat jadwal produksi menjadi periodik. Pada jurnal
tersebut persamaan baru dibuat berdasarkan informasi waktu produksi pada
dua mesin.
C. Rumusan Masalah
Berdasarkan uraian di atas, maka penulis dapat merumuskan masalah
dalam penelitian ini sebagai berikut.
1. Bagaimana sifat-sifat model matematika waktu produksi pada graf sistem
produksi ber-loop dengan menggunakan sistem persamaan linear aljabar
max-plus?
2. Bagaimana menentukan waktu input paling lambat dengan menggunakan
aljabar max-plus pada graf sistem produksi ber-loop yang menyebabkan
keadaan sistem menjadi periodik?
D. Pembatasan Masalah
Pembatasan masalah dalam skripsi ini dilakukan pada graf sistem
produksi ber-loop satu input satu output dengan asumsi kapasitas buffer
(penyangga) input maupun internal cukup besar untuk menjamin tidak ada
penyangga yang overflow (meluap). Waktu untuk mempersiapkan bahan-
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

6
bahan dalam penelitian ini tidak diperhatikan atau dianggap nol, serta waktu
produksi dibatasi sampai barang jadi siap untuk dipasarkan.
E. Batasan Istilah
Berdasarkan latar belakang, untuk menghindari kesalahpahaman
dalam memahami hasil penelitian ini, maka diperlukan batasan istilah sebagai
berikut.
1. Waktu Pemrosesan adalah waktu yang diperlukan unit pemrosesan untuk
menyelesaikan pekerjaan (pemrosesan) dalam satu periode produksi.
2. Waktu Produksi adalah waktu yang diperlukan oleh sistem produksi
untuk menyelesaikan pekerjaannya dari mulai bahan baku dimasukkan ke
sistem hingga menjadi suatu produk dan keluar dari sistem dalam satu
periode produksi.
3. Waktu Transfer adalah waktu perpindahan bahan dari suatu unit
pemrosesan ke unit pemrosesan yang lain.
4. Waktu Input adalah waktu yang diperlukan saat bahan mentah memasuki
unit pemrosesan yang pertama.
5. Graf adalah pasangan dengan adalah himpunan berhingga tak
kosong yang beranggotakan titik (vertices) dan adalah himpunan
pasangan (tak terurut) titik-titik. Anggota disebut rusuk (edges).
6. Loop adalah rusuk pada graf yang hanya memiliki satu titik ujung.
7. Periodik adalah suatu kejadian yang memiliki selang waktu tetap.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

7
F. Tujuan Penelitian
Tujuan penelitian yang ingin dicapai adalah sebagai berikut.
1. Mengetahui sifat-sifat model matematika waktu produksi pada graf
sistem produksi ber-loop dengan menggunakan sistem persamaan linear
aljabar max-plus.
2. Menentukan waktu input paling lambat dengan menggunakan aljabar
max-plus pada graf sistem produksi ber-loop yang menyebabkan keadaan
sistem menjadi periodik.
G. Manfaat Penelitian
1. Bagi Penulis
Penulis mendapatkan pengetahuan baru terkait aljabar max-plus
yang belum diperoleh ketika perkuliahan. Melalui penelitian yang
dilakukan, penulis memperoleh pengalaman untuk menemukan suatu
teori baru terkait aljabar max-plus khususnya pada graf ber-loop yang
mampu meningkatkan kemampuan penulis dalam mengaitkan berbagai
hal dan belajar membaca pola-pola yang terbentuk dari hail perhitungan
barisan keadaan sistem dan output.
2. Bagi Pembaca
Penelitian yang dilakukan bermanfaat untuk menambah
pengetahuan pembaca mengenai sistem persamaan linear aljabar max-
plus serta aplikasinya dalam optimasi waktu produksi pada graf sistem
produksi ber-loop. Selain itu, hasil dari penelitian ini dapat dijadikan
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

8
sebagai tambahan informasi dan pustaka bagi lembaga terkait untuk
rujukan penelitian atau sebagai bahan perkuliahan tentang aljabar max-
plus. Selain itu pembaca juga mendapatkan pengetahuan untuk
menentukan waktu optimum suatu produksi, sehingga mampu
menerapkannya untuk permasalahan lain yang relevan.
3. Bagi Produsen
Hasil dari penelitian ini dapat dijadikan sebagai rujukan dalam
pembuatan jadwal produksi secara periodik. Keperiodikan jadwal dapat
mempermudah produsen dalam proses produksi dikarenakan waktu
produksi yang dapat diprediksi sebelumnya.
H. Metode Penelitian
Metode yang digunakan dalam penelitian ini adalah studi pustaka.
Langkah-langkah yang dilakukan dalam penelitian ini adalah sebagai berikut.
1. Menentukan tema dan judul penelitian.
2. Mengumpulkan serta membaca jurnal, tesis, maupun buku terkait sistem
persamaan linear aljabar max-plus khususnya sistem persamaan linear
aljabar max-plus waktu invarian yang akan digunakan untuk menyusun
landasan teori dalam penelitian.
3. Melakukan observasi lapangan untuk mempertajam latar belakang dan
menemukan masalah-masalah dalam sistem produksi terkait.
4. Menyusun graf sistem produksi ber-loop.
5. Membuat graf modifikasi dari graf sistem produksi ber-loop.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

9
6. Membuat aturan sinkronisasi berdasarkan graf sistem produksi
modifikasi yang telah dibuat.
7. Menyusun sistem persamaan linear aljabar max-plus berdasarkan aturan
sinkronisasi sebelumnya.
8. Merepresentasikan sistem persamaan linear aljabar max-plus kedalam
bentuk matriks.
9. Menghitung nilai eigen yang bersesuaian dengan matriks A.
10. Menghitung barisan keadaan sistem dan output.
11. Membuat analisis penjadwalan periodik berdasarkan waktu input paling
lambat.
12. Menyusun jadwal produksi kue berdasarkan barisan keadaan sistem dan
output dengan menggunakan waktu input paling lambat.
I. Sistematika Penulisan
Penulisan skripsi ini akan mengkaji lebih mendalam terkait aplikasi
sistem persamaan linear aljabar max-plus dalam Sistem Produksi Sederhana
terkait waktu optimum produksi. Skripsi ini terdiri atas lima bab. Bab I
merupakan pendahuluan yang berisi latar belakang, kajian pustaka, rumusan
masalah, batasan masalah, tujuan penelitian, manfaat penelitian, metode
penelitian serta sistematika penulisan.
Bab II berisi penjelasan tentang optimasi serta aljabar max-plus yang
meliputi definisi dan sifat-sifat aljabar max-plus, vektor dan matriks atas
aljabar max-plus, teori graf dalam aljabar max-plus serta sistem persamaan
linear pada aljabar max-plus dan aplikasinya dalam sistem produksi sederhana
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
10
sebagai landasan teori. Selain itu diberikan pula algoritma MATLAB untuk
mempermudah perhitungan waktu optimum produksi.
Bab III berisi pembahasan lebih lanjut mengenai pemodelan optimasi
waktu produksi pada graf sistem produksi ber-loop dengan menggunakan
sistem persamaan linear aljabar max-plus. Pada bab ini akan dibuat graf
sistem produksi ber-loop beserta graf modifikasinya yang sesuai dan
dilanjutkan dengan membuat aturan sinkronisasi yang sesuai dengan graf
sistem produksi modifikasi. Graf sistem produksi yang disajikan
menampilkan beberapa contoh sistem produksi. Pada contoh ketiga graf
sistem produksi yang digunakan merupakan graf sistem produksi tahapan
pembuatan kue dari hasil pengamatan yang telah dilakukan. Berdasarkan
aturan sinkronisasi kemudian disusun sistem persamaan linearnya. Sistem
persamaan linear yang telah disusun selanjutnya direpresentasikan dalam
bentuk matriks. Kemudian, dihitung nilai eigen pada matriks .
Bab IV berisi analisis waktu optimum produksi berdasarkan
perhitungan dengan menggunakan aplikasi MATLAB. Pada bab ini akan dicari
keterhubungan nilai eigen matriks terhadap keperiodikan barisan keadaan
sistem dan output, serta akan dijelaskan cara menentukan waktu input paling
lambat. Berdasarkan barisan keadaan sistem dan output yang diperoleh, akan
dijelaskan mengenai penjadwalan pada produksi kue yang telah diamati
sebelumnya.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

11
Bagian terakhir dalam penulisan skripsi ini berisikan kesimpulan hasil
penelitian dan saran-saran yang dapat digunakan dalam penelitian
selanjutnya. Bagian terakhir ini termuat dalam Bab V.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

12
BAB II
LANDASAN TEORI
A. Optimasi
Menurut Berlianty & Arifin (2010:9), optimasi adalah proses
pencarian satu atau lebih penyelesaian yang berhubungan dengan nilai-nilai
dari satu atau lebih fungsi objektif pada suatu masalah sehingga diperoleh
satu nilai optimal. Optimasi bertujuan untuk meningkatkan kinerja mesin
produksi sehingga mempunyai kualitas yang baik dan hasil kerja yang tinggi.
Tujuan tersebut digunakan untuk beberapa perusahaan seperti perusahaan
yang bergerak di bidang manufaktur dalam proses produksi.
Optimasi banyak memberikan manfaat dalam mengambil keputusan
dan dapat diterapkan dalam berbagai bidang diantaranya adalah dalam bidang
industri seperti untuk konstruksi sipil atau mesin, pemeliharaan jaringan, dan
pengoperasian mesin. Pengoperasian mesin membutuhkan pengambilan
keputusan yang tepat agar diperoleh waktu optimal.
B. Definisi dan Sifat-sifat Aljabar Max-plus
Pembahasan akan diawali dengan definisi semiring.
Definisi 2.1
Suatu semiring adalah suatu himpunan tak kosong S disertai dengan
dua operasi biner dan yang memenuhi aksioma berikut.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

13
i) merupakan semigrup komutatif dengan elemen netral 0, yaitu
memenuhi
,
ii) adalah semigrup dengan elemen satuan 1, yaitu memenuhi
iii)Sifat penyerapan elemen netral 0 terhadap operasi yaitu memenuhi
iv) Operasi distributif terhadap yaitu berlaku
.
Contoh 2.1
Diberikan dengan adalah himpunan semua bilangan real
dan . Pada didefinisikan operasi dan , sehingga
berlaku :
.
Selanjutnya akan ditunjukkan merupakan semiring dengan elemen
netral dan elemen satuan .
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

14
Bukti :
merupakan semiring karena untuk setiap berlaku :
1. komutatif, asosiatif, dan memiliki elemen netral
a.
b.
c.
2. asosiatif dan memiliki elemen identitas
a.
b.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

15
3. Sifat penyerapan elemen netral terhadap operasi
4. Operasi distributif terhadap
a.
b.
Definisi 2.2
Suatu semiring dikatakan komutatif jika operasi bersifat komutatif,
yaitu berlaku .
Definisi 2.3
Suatu semiring dikatakan idempoten jika operasi bersifat
idempoten, yaitu berlaku .
Menurut Baccelli, et.al (2001) dalam Rudhito (2016:14) istilah semiring
idempoten disebut dioid.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

16
Contoh 2.2
Semiring merupakan semiring komutatif yang sekaligus
idempoten.
Bukti :
berlaku :
dan
Definisi 2.4
Suatu semiring komutatif disebut semifield jika setiap elemen tak
netralnya mempunyai invers terhadap operasi yaitu
Contoh 2.3
Semiring komutatif merupakan semifield.
Bukti :
terdapat – sehingga berlaku
Dari contoh 2.2 dan 2.3 dapat disimpulkan bahwa merupakan
semifield idempoten. Struktur aljabar disebut aljabar max-plus,
yang selanjutnya cukup ditulis . Elemen-elemen dari disebut juga
skalar. (Rudhito, 2016)
C. Matriks dan Vektor dalam Aljabar Max-plus
Himpunan matriks berukuran dalam aljabar max-plus
dinotasikan dengan untuk . Elemen
pada baris ke-
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

17
dan kolom ke- dinotasikan oleh atau [ dengan dan .
Matriks A dapat direpresentasikan sebagai berikut.
[
]
Penjumlahan matriks, perkalian skalar dengan matriks, perkalian antar
matriks, serta transpose matriks dapat didefinisikan sebagai berikut.
Definisi 2.5
Diberikan matriks . Elemen ke- dari adalah :
[
Dengan dan .
Definisi 2.6
Diberikan matriks dan . Elemen ke- dari ⨂
adalah :
[ ⨂ ⨂
Dengan dan
Definisi 2.7
Diketahui
,
, elemen ke- dari ⨂ adalah :
[ ⨂
⨂
Dengan dan
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

18
Definisi 2.8
Diberikan matriks , Elemen ke- dari adalah :
[
Dengan dan
Contoh 2.4
Diberikan matriks *
+, *
+ maka :
1. *
+ *
+ [
] *
+
2. ⨂ ⨂*
+ * ⨂ ⨂ ⨂ ⨂
+ *
+
3. ⨂ *
+⨂ *
+
[
]
*
+
4. *
+
*
+
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

19
Teorema 2.1 (Rudhito, 2016)
Pernyataan-pernyataan berikut berlaku untuk sebarang skalar dan dan
sebarang matriks dan asalkan operasi yang dimaksud terdefinisi.
1.
2. A
3.
4.
5.
6.
7.
8.
9.
10.
11.
Selanjutnya akan dibuktikan teorema nomor 4, sedangkan bukti yang lain
langsung mengikuti definisi operasi dan sifat-sifat operasi dalam .
Bukti :
Diambil sebarang
. Unsur ke- matriks
adalah
[
( )
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

20
( )
(
) (
)
[ [
Definisi 2.9 (Rudhito, 2016)
Didefinisikan matriks dengan {
Definisi 2.10 (Rudhito, 2016)
Didefinisikan matriks dengan , untuk setiap dan .
Definisi 2.11 (Rudhito, 2016)
Untuk sebarang didefinisikan
.
Definisi 2.12 (Schutter, 1996 dalam Rudhito, 2016)
Diberikan suatu matriks . Skalar disebut nilai eigen
max-plus matriks A jika terdapat suatu vektor dengan
sehingga . Vektor tersebut disebut vektor eigen max-plus
matriks yang bersesuaian dengan .
Teorema 2.2
Diberikan suatu matriks . Jika adalah nilai eigen matriks di
, maka merupakan bobot rata-rata suatu sirkuit dalam
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

21
Bukti :
Misalkan adalah nilai eigen matriks di , maka untuk setiap
berlaku dengan . Akibatnya
terdapat suatu indeks sehingga dengan .
Karena dan maka dan . Karena
maka terdapat suatu indeks sedemikian rupa sehingga
. Karena dan maka dan . Demikian
seterusnya dengan cara yang sama seperti di atas, maka diperoleh suatu
barisan sehingga
dengan
dan
untuk Karena banyak titik dalam graf
berhingga, maka terdapat suatu dan sehingga Akibatnya diperoleh
suatu sirkuit . Misalkan adalah , , , sehingga
diperoleh (
) (
) ( )
( ). Karena operasi di bersifat komutatif maka diperoleh
( ) (
) (
) atau (
) atau
. Hal ini berarti merupakan bobot rata-rata sirkuit .
Selanjutnya akan dibahas semimodul atas dan relasi urutan di
dalamnya. Dalam Rudhito, 2016 , semimodul atas didefinisikan sebagai
berikut.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

22
Definisi 2.13
Misalkan adalah semiring komutatif dengan elemen netral 0 dan
elemen identitas1. Semimodul M atas S adalah semigrup komutatif
bersama operasi perkalian skalar • : , dituliskan sebagai
yang memenuhi aksioma berikut. , berlaku :
i) ,
ii) ,
iii) ,
iv)
v)
Elemen dalam semimodul disebut vektor.
Contoh 2.5
Diberikan [ | . Untuk
setiap dan untuk setiap didefinisikan operasi
dengan [ dan operasi perkalian
skalar • dengan [ . Dari
teorema 2.1 1 dan 2 terlihat bahwa merupakan semigrup komutatif
dengan elemen netral [ . Selanjutnya dengan memperhatikan
teorema 2.1 10, 9, dan 7 dapat disimpulkan bahwa merupakan
semimodul atas .
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

23
Definisi 2.14 (Wohlgemuth,1990 dalam Rudhito 2016)
Relasi pada himpunan disebut urutan parsial pada jika untuk semua
berlaku :
i) Sifat refleksif, yaitu
ii) Sifat antisimetris, yaitu : jika dan , maka .
iii) Sifat transitif, yaitu : jika dan , maka .
Elemen dan dikatakan komparabel (comparable) jika atau .
Penulisan dapat ditulis juga dengan . Jika dan akan
dituliskan dengan .
Definisi 2.15 (Wohlgemuth 1990 dalam Rudhito, 2016)
Urutan parsial pada himpunan disebut urutan total pada jika setiap
dua elemen dalam komparabel.
Teorema 2.3 (Rudhito, 2016)
Jika semigrup komutatif idempoten maka relasi yang
didefinisikan pada dengan merupakan urutan parsial
pada .
Bukti :
Diambil sebarang .
i) Karena berlaku sifat idempoten maka .
ii) Jika dan maka dan . Karena berlaku
sifat komutatif maka diperoleh .
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

24
iii) Jika dan maka dan . Dari sini karena
berlaku sifat asosiatif maka
. Dengan demikian .
Akibat 2.1
Relasi yang didefinisikan pada dengan
merupakan urutan parsial pada . Lebih lanjut relasi ini merupakan urutan
total pada .
Bukti :
Karena merupakan semigrup komutatif idempoten, maka menurut
teorema 2.2 relasi yang didefinisikan pada di atas merupakan
urutan parsial pada . Selanjutnya diambil maka berlaku
atau .
Akibat 2.2
Relasi yang didefinisikan pada dengan
untuk setiap dan , merupakan urutan parsial pada .
Bukti :
Dengan menggunakan teorema 2.1 1, 2, dan 11 dapat dilihat bahwa
merupakan semigrup komutatif idempoten, sehingga menurut teorema 2.2 relasi
yang didefinisikan pada di atas merupakan urutan parsial.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

25
Akibat 2.3
Relasi yang didefinisikan pada dengan
untuk setiap , merupakan relasi urutan parsial pada .
Bukti :
Karena merupakan semigrup komutatif idempoten maka relasi
yang didefinisikan pada merupakan urutan parsial pada
Relasi yang didefinisikan pada bukan merupakan urutan total,
karena terdapat *
+ dan *
+ dengan
*
+ *
+ *
+. Sehingga dan .
Demikian juga dengan relasi yang didefinisikan pada bukan
merupakan urutan total, karena terdapat vektor [ dan
[ dengan [ [
[ . Dengan demikian dan .
Teorema 2.4
Diberikan matriks . Jika
dengan maka
.
Bukti :
Diambil sebarang dengan maka
.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

26
D. Teori Graf dalam Aljabar Max-plus
Graf didefinisikan sebagai suatu pasangan (V, E) dengan V adalah
suatu himpunan berhingga tak kosong yang anggotanya disebut titik (vertices)
dan E adalah suatu himpunan pasangan (takterurut) titik-titik. Anggota E
disebut rusuk (edges). Suatu graf berarah didefinisikan sebagai suatu pasangan
(V, A) dengan V adalah suatu himpunan titik-titik dan A adalah suatu
himpunan pasangan terurut titik-titik. Anggota A disebut busur (arc). Untuk
busur disebut titik awal busur dan w disebut titik akhir busur.
Suatu loop adalah busur .
Jika suatu graf disajikan dalam gambar, titik digambarkan sebagai
noktah yang diberi label dengan nama titik yang diwakilinya. Rusuk
digambarkan sebagai kurva atau ruas garis yang menghubungkan noktah-
noktah yang bersesuaian pada rusuk atau loop. Busur digambarkan sebagai
kurva atau ruas garis berarah yang menghubungkan noktah-noktah yang
bersesuaian dengan titik awal dan titik akhir busur, dengan tanda panah pada
ujungnya yang menandakan arah busur.
Diberikan adalah graf berarah dengan
. Suatu lintasan dalam G adalah suatu barisan berhingga busur
dengan ( ) A untuk suatu l N dan
k = 1, 2, ... , l 1 (Wilson,1972). Lintasan ini direpresentasikan dengan
... . Titik disebut titik awal lintasan dan titik disebut titik
akhir lintasan. Untuk suatu lintasan , panjang lintasan didefinisikan
sebagai banyak busur yang menyusun dan dinotasikan dengan | | .
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

27
Diberikan graf berarah G = (V, A) dengan V = {1, 2, ... , p}. Graf
berarah G dikatakan berbobot jika setiap busur (j, i) A dikawankan dengan
suatu bilangan real . Bilangan real disebut bobot busur (j, i),
dinotasikan dengan w(j, i). Dalam penyajiannya dengan gambar untuk graf
berarah berbobot, busur diberi label dengan bobotnya. Dari pengertian graf
berbobot ini, setiap matriks A bersesuaian dengan suatu graf berarah
berbobot seperti diberikan dalam definisi berikut.
Definisi 2.16 (Graf bobot, Schutter 1996)
Diberikan . Graf bobot dari A adalah graf berarah berbobot
dengan dan |
Contoh 2.6
Diberikan [
].
Graf bobot dari A adalah graf berarah berbobot dengan
dan }. Perhatikan
sebaliknya bahwa untuk setiap graf berarah berbobot selalu
dapat didefinisikan suatu matriks dengan :
{
E. Sistem Persamaan Linear dalam Aljabar Max-plus
Menurut Rudhito, 2016, secara umum terdapat dua bentuk sistem
persamaan linear (SPL) max-plus yaitu SPL max-plus input output dan SPL
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

28
max-plus iteratif. Pada bagian ini hanya akan dibahas terkait SPL max-plus
input-output. Bentuk umum dari sistem persamaan linear max-plus input
output adalah : dimana
, dan .
Untuk mencari solusi dari persamaan tersebut terlebih dulu dapat dicari sub
penyelesaiannya.
Definisi 2.17 (Rudhito, 2016)
Diberikan dan
. Vektor disebut suatu sub
penyelesaian sistem persamaan linear jika vektor tersebut
memenuhi .
Sub penyelesaian selalu ada, karena untuk [ selalu
berlaku :
Definisi 2.18
Sub penyelesaian dari sistem disebut sub penyelesaian terbesar
sistem jika untuk setiap subpenyelesaian dari sistem
.
Teorema 2.5
Diberikan dengan unsur-unsur setiap kolomnya tidak semuanya
sama dengan dan . Sub penyelesaian terbesar ada dan
diberikan oleh dengan
untuk setiap dan .
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

29
Bukti : Perhatikan bahwa:
( A x m b ) {
⨂ ⨂ ⨂
⨂ ⨂ ⨂
⨂ ⨂ ⨂
( ( ⨂ ) +
⨂
Karena unsur setiap kolom matriks A tidak semuanya sama dengan , maka
untuk
setiap j selalu ada i sehingga yang berarti ada. Mengingat untuk
setiap berlaku dan maka koefisien-
koefisien tidak akan berpengaruh pada nilai A x. Sehingga berlaku:
( )
( )
( )
(
( ) *
(
( ) *
Jadi subpenyelesaian sistem di atas adalah setiap vektor yang
komponen-komponennya memenuhi
( )
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

30
Jika vektor [ didefinisikan dengan
( ) untuk setiap maka diperoleh :
(
( ) *
(
( ) *
( )
(⨁
( ) ,
Jadi vektor tersebut merupakan subpenyelesaian sistem . Karena
–
( ) maka . Akibatnya .
Jadi vektor tersebut merupakan subpenyelesaian terbesar sistem
Dengan demikian untuk menyelesaikan sistem persamaan
pertama-tama dihitung subpenyelesaian terbesar kemudian diperiksa apakah
subpenyelesaian terbesar itu memenuhi sistem persamaan atau tidak. Untuk
mempermudah perhitungan subpenyelesaian terbesar dapat
digunakan cara berikut ini :
[
]
[
]
[
]
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

31
[
]
Jadi untuk menghitung subpenyelesaian terbesar dari sistem persamaan
terlebih dulu dapat dicari
Jika sistem persamaan linear max-plus mempunyai
subpenyelesaian terbesar yang bukan merupakan penyelesaian, maka sistem
persamaan linear max-plus tersebut tidak memiliki penyelesaian. Hal ini
ditunjukkan sebagai berikut.
Andaikan adalah penyelesaian sistem linear max-plus yang
berarti untuk setiap . Misal sistem persamaan
linear max-plus mempunyai subpenyelesaian terbesar yang
bukan merupakan penyelesaian, yang berarti terdapat
sehingga . Karena juga merupakan subpenyelesaian, maka
. Akibatnya menurut teorema 2.3 berlaku yang
berarti untuk setiap . Hal ini berakibat
terdapat sehingga yang
kontradiksi dengan pengandaian di atas. (Rudhito, 2016).
Teorema 2.6 (Zimmermann dalam Rudhito, 2016)
Andaikan adalah subpenyelesaian terbesar sistem vektor
merupakan subpenyelesaian sistem jika dan hanya jika .
Bukti :
i. Andaikan adalah subpenyelesaian terbesar sistem
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

32
Jika vektor merupakan subpenyelesaian sistem maka
. Hal ini terbukti benar sesuai dengan definisi subpenyelesaian
terbesar.
ii. Andaikan . Mengingat operasi pada matriks konsisten
terhadap urutan dan adalah subpenyelesaian terbesar sistem
, maka berlaku . Jadi
yang berarti merupakan subpenyelesaian sistem
iii. Karena i dan ii benar, maka teorema tersebut terbukti benar.
Teorema 2.7 (Zimmermann dalam Rudhito, 2016)
Sistem mempunyai penyelesaian jika dan hanya jika
dimana vektor adalah subpenyelesaian terbesar dari sistem .
Bukti :
i. Akan dibuktikan jika dimana vektor adalah
subpenyelesaian terbesar dari sistem maka sistem
mempunyai penyelesaian. Andaikan . Karena adalah
subpenyelesaian terbesar dari sistem maka berlaku
Mengingat berlaku dan maka
sehingga merupakan penyelesaian . Jadi
terbukti benar mempunyai penyelesaian.
ii. Akan dibuktikan jika mempunyai penyelesaian maka
dimana vektor adalah subpenyelesaian terbesar dari
sistem . Andaikan mempunyai penyelesaian
yaitu vektor , maka atau dan .
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

33
Terlihat bahwa merupakan subpenyelesaian sistem .
Dikarenakan adalah subpenyelesaian terbesar sistem
maka berlaku . Mengingat operasi pada matriks konsisten
terhadap urutan maka berlaku . Jadi
iii. Karena i dan ii benar maka teorema tersebut terbukti benar.
Akibat 2.4 (Schutter dan Boom dalam Rudhito,2016)
Diberikan dengan unsur-unsur setiap kolomnya tidak semuanya
sama dengan , dan . Jika adalah subpenyelesaian terbesar sistem
persamaan linear max-plus maka untuk setiap indeks
terdapat suatu indeks sedemikian hingga
.
Bukti :
Karena adalah subpenyelesaian terbesar sistem persamaan linear max-plus
maka menurut teorema 2.4
untuk setiap
dengan . Hal ini berarti untuk setiap indeks
terdapat suatu indeks sedemikian hingga
atau .
Definisi 2.19
Diberikan [ . Didefinisikan ‖ ‖
| | untuk
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

34
Teorema 2.8 (Schutter dan Boom dalam Rudhito, 2016)
Diberikan dengan komponen setiap kolomnya tidak semuanya
sama dengan dan . Vektor
dengan subpenyelesaian
terbesar sistem dan ‖ ‖ , merupakan vektor yang
meminimalkan ‖ ‖ . Selanjutnya ‖ ‖
.
Bukti :
Misalkan subpenyelesaian terbesar sistem .
i. Jika merupakan penyelesaian sistem , maka ‖
‖
| | Akibatnya, meminimalkan ‖
‖ .
ii. Jika bukan penyelesaian sistem maka ‖ ‖
| | . Karena maka
| |
. Himpunan indeks yaitu
dapat dipartisi menjadi tiga himpunan dan sedemikian
hingga :
untuk semua
untuk semua
untuk semua , dengan
Karena adalah subpenyelesaian terbesar sistem maka
menurut akibat 2.4 untuk setiap indeks terdapat suatu
indeks sedemikian sehingga
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

35
Akibatnya tidak kosong. Karena bukan merupakan penyelesaian sistem
, maka terdapat suatu indeks sehingga
| |
. Akibatnya himpunan juga tidak kosong. Sementara himpunan dapat
kosong ataupun tidak kosong. Menurut teorema 2.3 untuk setiap
berlaku yang berakibat
| |
| | untuk setiap . Dengan memperhatikan
teorema 2.1 6 dan 8 diperoleh bahwa untuk sebarang berlaku
. Jika , maka , yang
berakibat
| |
( ) untuk
skalar positif . Didefinisikan , dengan
. Karena ( )
, maka diperoleh :
,
Karena dan tidak kosong dan untuk semua , maka
‖ ‖
| |
| | | | yang
mempunyai nilai minimum untuk
. Jadi (
)
merupakan vektor yang meminimumkan ‖ ‖ . Selanjutnya
diperoleh
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

36
‖ ‖
(|
| |(
* |*
Kemudian akan ditunjukkan bahwa tidak ada vektor yang memenuhi
‖ ‖
Misalkan terdapat vektor sedemikian hingga
‖ ‖
(3.1)
Didefinisikan maka . Karena
merupakan subpenyelesaian terbesar sistem maka menurut
Akibat 2.4 untuk setiap terdapat suatu indeks
sedemikian hingga . Karena
( ) , maka diperoleh
. Karena ketaksamaan (3.1) maka
. (3.2)
untuk setiap
Karena merupakan subpenyelesaian terbesar sistem
maka terdapat suatu indeks sehingga
atau .
Karena
Maka untuk setiap (3.3)
Akibatnya :
( )
( )
Karena ketaksamaan (3.2) maka :
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

37
Jadi terdapat suatu indeks sedemikian hingga
atau
. Hal ini berakibat bahwa ‖
‖
yang bertentangan dengan pemisalan bahwa ‖
‖
.
F. Penerapan Aljabar Max-plus dalam Sistem Linear Max-plus Waktu
Invarian dan Sistem Produksi Sederhana
Sistem linear max-plus waktu invarian merupakan sistem kejadian
diskrit yang mempunyai waktu aktifitas dan barisan kejadian yang
deterministik. Matriks dalam persamaan sistemnya merupakan matriks
konstan, yaitu tidak tergantung pada parameter . (Rudhito, 2016).
Definisi 2.20 (Sistem Linear Max-plus Waktu Invarian (SLMI), Schutter
1996)
Sistem Linear Max-plus Waktu Invarian adalah Sistem Kejadian Diskrit
(SKD) yang dapat dinyatakan dengan persamaan berikut.
untuk dengan kondisi awal
. Vektor menyatakan keadaan atau state,
adalah vektor input, dan
adalah vektor output
sistem saat waktu ke- .
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

38
SLMI seperti dalam definisi diatas secara singkat dituliskan dengan SLMI
dan dituliskan SLMI jika kondisi awal diberikan.
Contoh 2.7
Diperhatikan suatu sistem produksi sederhana yang disajikan dalam
gambar di atas. Sistem ini terdiri dari 3 unit pemrosesan , , . Bahan
baku dimasukkan ke dan , diproses dan dikirimkan ke . Waktu
pemrosesan untuk , , dan berturut-turut adalah dan
satuan waktu. Diasumsikan bahwa bahan baku memerlukan
satuan waktu untuk dapat masuk dari input ke dan memerlukan
satuan waktu dari produk yang telah diselesaikan di untuk sampai di ,
sedangkan waktu transportasi yang lain diabaikan. Pada input sistem dan
antara unit pemrosesan terdapat penyangga (buffer), yang berturut-turut
disebut buffer input dan buffer internal, dengan kapasitas yang cukup besar
untuk menjamin tidak ada penyangga yang meluap (overflow). Suatu unit
pemrosesan hanya dapat mulai bekerja untuk suatu produk baru jika ia telah
menyelesaikan pemrosesan produk sebelumnya.
Gambar 2.1 Contoh Sistem Produksi Sederhana
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

39
Diasumsikan bahwa setiap unit pemrosesan mulai bekerja segera
setelah bahan tersedia. Didefinisikan (Rudhito, 2010):
i) : waktu saat bahan baku dimasukkan ke sistem untuk
pemrosesan ke- ,
ii) : waktu saat unit pemrosesan ke-i mulai bekerja untuk
pemrosesan ke- ,
iii) : waktu saat produk ke-k yang diselesaikan meninggalkan sistem.
Waktu saat mulai bekerja untuk pemrosesan ke- dapat
ditentukan sebagai berikut. Jika bahan mentah dimasukkan ke sistem untuk
pemrosesan ke- , maka bahan mentah ini tersedia pada input unit
pemrosesan pada waktu . hanya dapat mulai
bekerja pada sejumlah bahan baku baru segera setelah menyelesaikan
pemrosesan sebelumnya, yaitu sejumlah bahan baku untuk pemrosesan ke- .
Waktu pemrosesan pada adalah satuan waktu, maka produk
setengah jadi ke-k akan meninggalkan pada saat . Hal ini
dapat dituliskan dengan :
untuk
Dengan alasan yang sama untuk , dan waktu saat produk ke-k yang
diselesaikan meninggalkan sistem, diperoleh:
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

40
untuk
Menggunakan operasi Aljabar Max-plus, persamaan-persamaan dalam
model sistem produksi sederhana di atas dapat dituliskan sebagai berikut:
Jika dituliskan dalam bentuk matriks persamaan di atas menjadi :
[
] [ ]
[ untuk dan
[ . Hasil di atas dapat juga dituliskan dengan:
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

41
untuk , dengan
[ , keadaan awal ,
[
] [
]
, dan [ .
Analisis Input-Output Sistem Linear Max-plus Waktu-Invariant
Jika kondisi awal dan suatu barisan input diberikan untuk suatu SLMI
, maka secara rekursif dapat ditentukan suatu barisan vektor
keadaan sistem dan barisan output sistem.
Diperhatikan sistem produksi sederhana (Gambar 2.1), misalkan
kondisi awal sistem [ yang berarti unit pemrosesan dan
berturut-turut memulai aktifitasnya saat waktu dan sementara unit
pemrosesan masih kosong dan harus menunggu datangnya input dari
dan . Bahan mentah dimasukkan sistem saat waktu dan
seterusnya yang berarti diberikan barisan input
, dan seterusnya, dengan untuk
setiap Secara rekursif dapat ditentukan barisan vektor
keadaan berikut.
[
] [ ] [
]
[
] [ ] [
]
[
] [
] [ ]
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

42
[
] [
] [
]
[
] [
] [ ]
[
] [
] [
]
[
] [
] [ ]
[
] [
] [
] dan seterusnya.
Kemudian diperoleh barisan output sistem sebagai berikut dengan
menggunakan 3 :
dan seterusnya. Hal ini
berarti bahwa produk dapat diambil saat 16, 22, 28, 35, dan seterusnya.
Teorema 2.9 (Input-Output SLMI
Diberikan suatu bilangan bulat positif Jika vektor output
[ dan vektor input [ pada
SLMI maka :
dengan
[
] dan [
]
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

43
Bukti :
Jika diberikan kondisi awal dan barisan input dengan
induksi matematika akan dibuktikan berlaku
( ) (
(
)) untuk
Diperhatikan bahwa
( ) (
(
))
Jadi benar untuk .
Andaikan benar untuk
( ) (
(
))
Maka
(( ) (
(
*),
( ) (
(
*)
( ) (
(
*)
Jadi benar untuk .
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

44
Akibatnya diperoleh
(
* (
) untuk
Diberikan suatu bilangan bulat positif . Jika didefinisikan
[ dan [ maka dari
persamaan diperoleh :
Atau dalam persamaan matriks dapat dituliskan sebagai :
[
]
[
] [
] [
]
atau
dengan
[
] dan [
]
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

45
Contoh 2.8
Diberikan suatu sistem produksi seperti pada Gambar 2.1. Didefinisikan
[ . Jika diberikan [ dan
[ , maka diperoleh dengan
*
+ dan *
+
Diperhatikan bahwa
*
+ *
+ *
+
Hal ini berarti bahwa jika kondisi awal [ dan bahan baku
dimasukkan ke dalam sistem pada saat waktu
maka produk akan meninggalkan sistem pada saat waktu
Berikut akan dibahas masalah input paling lambat pada SLMI
Masalah input paling lambat pada SLMI adalah sebagai berikut:
Diberikan suatu bilangan bulat positip . Diketahui vektor output
[ . Misalkan vektor [ adalah
vektor input. Permasalahannya adalah menentukan vektor input u terbesar
(waktu paling lambat) sehingga memenuhi ,
dengan K dan H seperti dalam Teorema 2.9.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

46
Teorema 2.10
Diberikan SLMI dengan Jika maka
penyelesaian masalah input paling lambat pada SLMI diberikan
oleh [ dengan ( )
.
Bukti : Karena , maka .
Akibatnya masalah input paling lambat pada SLMI menjadi
masalah menentukan vektor input terbesar (waktu paling lambat) yang
memenuhi . Masalah ini merupakan masalah menentukan
subpenyelesaian terbesar sistem persamaan linear max-plus .
Karena maka komponen setiap kolom matriks tidak semuanya
sama dengan . Menurut Teorema 2.5 subpenyelesaian terbesar sistem
persamaan linear max-plus diberikan oleh vektor
[ dengan ( )
.
Teorema 2.11
Diberikan SLMI dengan Jika maka
penyelesaian masalah minimisasi simpangan ouput pada SLMI
diberikan oleh ⁄ , dengan merupakansubpenyelesaian terbesar
sistem dan | |.
Bukti : Karena , maka .
Akibatnya masalah minimisasi simpangan maksimum output ini menjadi
menentukan masalah vektor input sedemikian hingga | |
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

47
minimal. Karena maka komponen setiap kolom matriks tidak
semuanya sama dengan . Seperti masalah optimisasi yang berkaitan dengan
persamaan linear max-plus , menurut Teorema 2.8 suatu
penyelesaian untuk masalah di atas diberikan oleh ⁄ dengan
merupakansubpenyelesaian terbesar sistem dan
| |.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

48
Untuk mempermudah dalam perhitungan sistem, berikut diberikan list program
MATLAB untuk perhitungan masalah-masalah di atas.
% Program MATLAB Menghitung INPUT-OUTPUT Sistem Linear Max-
plus Waktu-Invariant
% Oleh: M. Andy Rudhito FKIP Universitas Sanata Dharma
% input: A = matriks max-plus Anxn
% B = matriks nx1
% C = matriks 1xn
% x0 = kondisi awal
% u = barisan input
% output: x(k) = barisan keadaan sistem
% y(k) = barisan output sistem
function io_SLMI = maxio
% Memasukkan input
disp(' ')
disp(' INPUT-OUTPUT SLMI(A, B, C, x0) ')
disp(' --------------------------------')
disp(' ')
A = input(' Masukkan matriks A(nxn) = ');
disp(' ')
B = input(' Masukkan matriks B(nx1) = ');
disp(' ')
C = input(' Masukkan matriks C(1xn) = ');
disp(' ')
x0 = input(' Masukkan kondisi awal x0(nx1) = ');
disp(' ')
u = input(' Masukkan barisan input sp kej ke-k u(kx1) = ');
disp(' ')
q = length(u);
[a1, a2] = size(A);
L = zeros(a1,q);
M = zeros(1,q);
L(:,1)= x0;
% Menghitung x(1) = Ax(0) + Bu(1)
[x01, x02] = size(x0);
for i = 1 : a1
for j = 1 : x02
Ax0(i, j) = -Inf;
for p = 1: a2
Ax0(i, j) = max(Ax0(i, j) , A(i, p) + x0(p, j));
end;
end;
end;
x = max(Ax0, B+u(1));
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

49
% Menghitung y(1) = Cx(1)
[c1, c2] = size(C);
[x1, x2] = size(x);
for i = 1 : c1
for j = 1 : x2
Cx(i, j) = -Inf;
for p = 1: c2
Cx(i, j) = max(Cx(i, j) , C(i, p) + x(p, j));
end;
end;
end;
L(:,2)= x;
M(1,1)= Cx;
% Menghitung x(k+1) = Ax(k) + Bu(k+1) dan Menghitung y(k) =
Cx(k) utk k=1,2,...,p
% Menghitung x(k+1) = Ax(k) + Bu(k+1)
[a1, a2] = size(A);
[x1, x2] = size(x);
for r = 1 : q-1;
for i = 1 : a1
for j = 1 : x2
Ax(i, j) = -Inf;
for p = 1: a2
Ax(i, j) = max(Ax(i, j) , A(i, p) + x(p, j));
end;
end;
end;
x = max(Ax, B+u(r+1));
% Menghitung y(k) = Cx(k)
[c1, c2] = size(C);
[x1, x2] = size(x);
for i = 1 : c1
for j = 1 : x2
Cx(i, j) = -Inf;
for p = 1: c2
Cx(i, j) = max(Cx(i, j) , C(i, p) + x(p, j));
end;
end;
end;
L(:,r+2)= x; M(1,r+1)= Cx;
end;
% Menampilkan hasil perhitungan
disp(' HASIL PERHITUNGAN :')
disp(' ===================')
disp(' Matriks A = '),disp(A)
disp(' Matriks B = '),disp(B)
disp(' Matriks C = '),disp(C)
disp(' Kondisi awal x0 = '),disp(x0)
disp(' Barisan input u = '),disp(u')
disp(' Barisan vektor keadaan sistem x(k) utk k = 0,1, 2, ...
: '), disp(L)
disp(' Barisan output sistem y(k) utk k = 1, 2, ... : '),
disp(M)
Gambar 2.2 List Program MATLAB Input-Output SLMI
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

50
% Program MATLAB Menghitung OPTIMISASI INPUT-OUTPUT Sistem
Linear Max-plus Waktu-Invariant
% Oleh: M. Andy Rudhito FKIP Universitas Sanata Dharma
% input: A = matriks max-plus Anxn
% B = matriks nx1
% C = matriks 1xn
% x0 = kondisi awal
% y = barisan output
% output:u_topi = barisan input paling lambat
% y_topi = barisan outpout untuk u_topi
% u_tilde = barisan input minimum simpangan
% y_tilde = barisan output untuk u_tilde
function opt_input_output = optio
% Memasukkan input
disp(' ')
disp(' OPTIMISASI INPUT-OUTPUT Sistem Linear Max-plus Waktu-
Invariant')
disp(' ----------------------------------------------------')
disp(' ')
A = input(' Masukkan matriks A = ');
disp(' ')
B = input(' Masukkan matriks B = ');
disp(' ')
C = input(' Masukkan matriks C = ');
disp(' ')
x0 = input(' Masukkan kondisi awal x0 = ');
disp(' ')
y = input(' Masukkan barisan output (dalam vektor kolom) y =
');
disp(' ')
q = length(y);
% Menghitung C*B = CB
[c1, c2] = size(C);
[b1, b2] = size(B);
for i = 1 : c1
for j = 1 : b2
CB(i, j) = -Inf;
for p = 1: c2
CB(i, j) = max(CB(i, j) , C(i, p) + B(p, j));
end;
end;
end;
% Menghitung C*A = CA
[c1, c2] = size(C);
[a1, a2] = size(A);
for i = 1:c1
for j = 1: a2
CA(i, j) = -Inf;
for p = 1: c2
CA(i, j) = max(CA(i, j) , C(i, p) + A(p, j));
end;
end;
end;
L = zeros(q,a2); L(1,:)= CA;
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

51
% Menghitung (C*A)*B
[ca1, ca2] = size(CA);
[b1, b2] = size(B);
for i = 1:ca1
for j = 1: b2
CAB(i, j) = -Inf;
for p = 1: ca2
CAB(i, j) = max(CAB(i, j) , CA(i, p) + B(p, j));
end;
end;
end;
% Menghitung A^k = Ak
[a1, a2]= size(A);
D = A;
for r = 1 : q-1
r+1;
for i = 1 : a1
for j = 1 : a2
Ak(i, j) = -Inf;
for p = 1: a2
Ak(i, j) = max(Ak(i, j) , A(i, p) + D(p, j));
end;
end;
end;
% Menghitung C*A^k = CAk
[c1, c2] = size(C);
[ak1, ak2] = size(Ak);
for i = 1 : c1
for j = 1: ak2
CAk(i, j) = -Inf;
for p = 1: c2
CAk(i, j) = max(CAk(i, j) , C(i, p) + Ak(p, j));
end;
end;
end;
L(r+1,:)=CAk;
% Menghitung CAkB
[cak1, cak2] = size(CAk);
[b1, b2] = size(B);
for i = 1:cak1
for j = 1: b2
CAkB(i, j) = -Inf;
for p = 1: cak2
CAkB(i, j) = max(CAkB(i, j) , CAk(i, p) + B(p, j));
end;
end;
end;
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

52
% Menyusun matriks H
for i = 1 : q
for j = 1 : q
if i < j
H(i,j) = -Inf;
end;
if i == j
H(i,j) = CB;
end;
if (i-j) ==1
H(i,j)= CAB;
end;
if (i-j) == r+1
H(i,j)= CAkB;
end;
if (i-j) > q
H(i,j)=[];
end;
end;
end;
D = Ak;
end;
% Menghitung K*x0
[l1, l2] = size(L);
[x01, x02] = size(x0);
for i = 1 : l1
for j = 1 : x02
Kx0(i, j) = -Inf;
for p = 1: l2
Kx0(i, j) = max(Kx0(i, j) , L(i, p) + x0(p, j));
end;
end;
end;
if max(Kx0 - y)<=0
% Menghitung input paling lambat u1 (H*(-y))
Ht=H';
my = -y;
[ht1, ht2] = size(Ht);
[my1, my2] = size(my);
for i = 1 : ht1
for j = 1 : my2
Htmy(i, j) = -Inf;
for p = 1: ht2
Htmy(i, j) = max(Htmy(i, j) , Ht(i, p) + my(p, j));
end;
end;
end;
u_topi = -Htmy;
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

53
Gambar 2.3 List Program MATLAB Optimasi Input-Output SLMI
% Mengitung H*u_topi
[h1, h2] = size(H);
[utp1, utp2] = size(u_topi);
for i = 1 : h1
for j = 1 : utp2
Hutp(i, j) = -Inf;
for p = 1: h2
Hutp(i, j) = max(Hutp(i, j) , H(i, p) + u_topi(p, j));
end;
end;
end;
Hutp;
% Menghitung barisan output y untuk u_topi
y_topi = max(Kx0, Hutp);
% Menghitung input minimum simpangan
delta = max(abs(y - y_topi));
u_tilde = u_topi + delta/2;
% Mengitung H*u_tilde
[h1, h2] = size(H);
[utd1, utd2] = size(u_tilde);
for i = 1 : h1
for j = 1 : utd2
Hutd(i, j) = -Inf;
for p = 1: h2
Hutd(i, j) = max(Hutd(i, j) , H(i, p) + u_tilde(p, j));
end;
end;
end;
Hutd;
% Menampilkan hasil perhitungan
disp(' HASIL PERHITUNGAN :')
disp(' ===================')
disp('Matriks A = '),disp(A)
disp('Matriks B = '),disp(B)
disp('Matriks C = '),disp(C)
disp('Kondisi awal x0 = '),disp(x0)
disp('Barisan output y = '),disp(y)
disp('Barisan input paling lambat u_topi = '),
disp((u_topi)')
disp('Barisan output y untuk u_topi = '), disp((y_topi)')
disp('Barisan input minimum simpangan u_tilde = '),
disp((u_tilde)')
disp('Barisan output y untuk u_tilde = '), disp((Hutd)')
else
disp('Input Minimum Simpangan tidak dapat dikerjakan (Kx0 >
y)')
end;
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

54
% Program Matlab Menghitung NILAI EIGEN MAX-PLUS Maksimum
dan VEKTOR EIGEN % yang bersesuaian untuk suatu Matriks max-plus A % Oleh: M. Andy Rudhito FKIP Universitas Sanata Dharma % input: matriks max-plus Anxn % output: irredusibel/ tak irredusibel matriks A % nilai eigen max-plus maximum % vektor eigen yang bersesuaian function hasilkali = eigmax disp(' ') disp(' NILAI EIGEN DAN VEKTOR EIGEN MAX-PLUS MATRIKS') disp(' ----------------------------------------------') disp(' ') A = input(' Matriks yang dihitung A = '); disp(' ') disp(' HASIL PERHITUNGAN :') disp(' ===================') disp(' Matriks A = '), disp(A) % Menghitung A pangkat , trace/pangkat dan nilai eigen
maksimum [m, n]= size(A); if m==n if n==2 for i = 1: n for j=1: n if i==j A(i,j) = 0; end; end; end; A0 = min(A); A00 = min(A0); if A00 == -Inf disp(' Matriks A TIDAK IRREDUSIBEL') else disp(' Matriks A IRREDUSIBEL') end; end; trace = max(diag(A)); D=A; for r=1:n-1 r+1; for i = 1: m for j = 1: n C(i, j) = -Inf; for p = 1: n C(i, j) = max( C(i, j) , A(i, p) + D(p, j) ); end; end; end;
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

55
A_plus = max(D, C); D=C; trace_perpk(r) = max(diag(D)./(r+1)); lambmax = max(trace_perpk); end; lambmaxmat = max(trace, lambmax); for r=1:n-2 r+1; for i = 1: m for j = 1: n C(i, j) = -Inf; for p = 1: n C(i, j) = max( C(i, j) , A(i, p) + D(p, j) ); end; end; end; A_plus1 = max(D, C); D=C; end; if n>2 for i = 1 : n for j = 1 : n if i==j A_plus1(i,j) = 0; end; end; end; A0_plus1 = min(A_plus1); A00_plus1 = min(A0_plus1); if A00_plus1 == -Inf disp(' Matriks A TIDAK IRREDUSIBEL') else disp(' Matriks A IRREDUSIBEL') end; end; disp('NILAI EIGEN max-plus maksimum matriks A =') disp(lambmaxmat); % Menghitung matriks normal B, B pangkat dan B+ B = A-lambmaxmat; disp(' ') G=B; for s=1:n-1 s+1; for i = 1: m for j = 1: n F(i, j) = -Inf; for p = 1: n F(i, j) = max( F(i, j) , B(i, p) + G(p, j) ); end; end; end;
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

56
Gambar 2.4 List Program MATLAB Nilai Eigen Maksimum
B_plus = max(G, F); G = F; end; % Menghitung matriks E dan B* for i = 1 : n for j = 1 : n if i ~= j E(i,j) = -Inf; end; end; end; B_star= max(E, B_plus); % Menentukan vektor eigen yang bersesuaian disp(' VEKTOR EIGEN max-plus yang bersesuaian =') x= diag(B_plus); for t = 1 : n if x(t)>=0 VE = B_star(:,t); disp(VE) end; end; % Perhatian jika yang diinputkan bukan matriks nxn else disp(' ') disp(' P E R H A T I A N ! ! !') disp('BUKAN matriks bujursangkar, nilai eigen tidak
didefinisikan') end;
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

57
BAB III
PEMODELAN WAKTU PRODUKSI DENGAN MENGGUNAKAN
SISTEM PERSAMAAN LINEAR ALJABAR MAX-PLUS PADA GRAF
SISTEM PRODUKSI BER-LOOP
Pada bab ini akan dijelaskan mengenai cara membuat model matematika
pada graf ber-loop dengan menggunakan sistem persamaan linear aljabar max-
plus. Penjelasan dilakukan dengan mengelompokkan graf ke dalam 3 sub-bab
sesuai jenisnya yaitu loop tunggal, loop berganda (multi loop), dan loop berganda
dengan banyak titik (multi loop multi vertex). Masing-masing sub-bab akan
diawali dengan penyajian graf sistem produksi ber-loop. Selanjutnya akan dibuat
graf modifikasi dari graf yang telah tersedia sesuai dengan kondisi awal.
Berdasarkan graf modifikasi yang telah dibuat kemudian dibuat aturan
sinkronisasi yang sesuai dan selanjutnya akan disusun model matematika dan
representasi bentuk matriks yang sesuai dengan menggunakan sistem persamaan
linear aljabar max-plus.
Pada bab ini untuk masing-masing sub-bab akan diberikan dua graf. Graf
yang pertama merupakan graf flowshop ber-loop, sedangkan graf yang kedua
merupakan modifikasi dari graf flowshop ber-loop. Graf flowshop ber-loop
dimodifikasi dengan penambahan unit pemrosesan sehingga graf berubah menjadi
flowshop tanpa loop.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

58
Dalam kasus ini, pekerjaan yang direpresentasikan dengan loop
merupakan pekerjaan yang identik, dilihat dari segi bahan yang dimasukkan
maupun waktu pemrosesan. Untuk suatu mesin yang melakukan beberapa kali
pekerjaan tetapi dengan bahan dan waktu pemrosesan yang berbeda untuk
masing-masing pekerjaan, graf yang tersaji bukan mengandung loop.
A. Loop Tunggal
Pada bagian ini akan disajikan graf suatu produksi dengan loop
tunggal. Graf dengan loop tunggal menandakan bahwa mesin yang
mengandung loop tersebut melakukan dua kali pekerjaan (job) dalam satu
kali periode produksi. Dengan mengandaikan bentuk segiempat sebagai
pemrosesan serta anak panah menunjukkan jalur produksi, graf tersebut dapat
tersaji sebagai berikut.
Pada Gambar 3.1 di atas, anak panah merah menunjukkan alur
produksi untuk pekerjaan (job) kedua pada mesin . melakukan pekerjaan
(job) pertama dan mendistribusikannya pada . yang telah menyelesaikan
pekerjaan pertamanya kemudian memulai lagi pekerjaan keduanya dan
mendistribusikannya ke . Dengan kata lain untuk setiap satu kali produksi
Gambar 3.1 Graf Sistem Produksi Loop Tunggal
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

59
hingga output tersedia, unit pemrosesan harus melakukan 2 kali pekerjaan
(job) sedangkan unit pemrosesan yang lain hanya melakukan 1 kali pekerjaan.
Dalam aljabar max-plus, untuk mempermudah dalam perhitungan waktu
optimum produksi dan penjadwalan secara periodik dapat dibuat graf
modifikasi dari graf ber-loop dengan menambahkan unit pemrosesan
bayangan, sehingga pola aliran berubah menjadi flowshop tanpa loop. Unit
pemrosesan bayangan ini merupakan pemrosesan yang terjadi pada loop.
Pada Gambar 3.1 unit pemrosesan bayangan akan ditambahkan untuk
merepresentasikan pekerjaan kedua pada unit pemrosesan . Graf tersebut
adalah sebagai berikut.
Pada Gambar 3.2 terlihat bahwa unit pemrosesan bayangan yang
ditambahkan untuk merepresentasikan pekerjaan kedua pada adalah .
Pekerjaan pertama yang telah diselesaikan pada yang direpresentasikan
dengan kemudian dilanjutkan ke unit pemrosesan , sementara itu unit
pemrosesan dapat memulai pekerjaannya segera setelah
menyelesaikan pekerjaannya.
Gambar 3.2 Graf Sistem Produksi Modifikasi Loop Tunggal
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

60
Setelah melakukan modifikasi graf, diperlukan penyusunan aturan
sinkronisasi sebelum membuat sistem persamaan linear aljabar max-plus.
Pembuatan aturan sinkronisasi terlebih dulu diawali dengan pemberian nilai
untuk masing-masing waktu transfer dan waktu pemrosesan pada yang sesuai
dengan Gambar 3.2. Waktu transfer dan waktu pemrosesan tersaji pada tabel
di bawah ini
Transfer Waktu (satuan waktu)
Pemrosesan Waktu (satuan waktu)
1 10
2 8
2 10
2 15
2 10
3 12
3
0
0
Berdasarkan pada Tabel 3.1 dan Tabel 3.2 kemudian disusun aturan
sinkronisasi yang sesuai. Pada Gambar 3.2 terlihat bahwa sistem produksi
modifikasi yang ada terdiri dari 6 unit pemrosesan
Proses produksi tersebut dapat didefinisikan sebagai berikut.
i) : waktu saat bahan baku dimasukkan ke sistem untuk
pemrosesan ke
ii) : waktu saat bahan dilakukan pemrosesan ke- dan mulai
bekerja untuk pemrosesan ke- dengan waktu pemrosesan sebesar .
iii) : waktu saat produk ke- yang diselesaikan meninggalkan
sistem.
Tabel 3.1 Waktu Transfer Graf
Sistem Produksi Loop Tunggal Tabel 3.2 Waktu Pemrosesan Graf
Sistem Produksi Loop Tunggal
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

61
1) Aturan sinkronisasi pada unit pemrosesan
Waktu saat mulai bekerja untuk pemrosesan ke- dapat
ditentukan sebagai berikut. Jika bahan mentah dimasukkan ke sistem untuk
pemrosesan ke- , maka bahan mentah ini akan tersedia pada input
pemrosesan pada waktu . Akan tetapi, unit
pemrosesan hanya dapat mulai bekerja pada sejumlah bahan baku baru
segera setelah menyelesaikan pemrosesan sebelumnya, yaitu sejumlah
bahan baku untuk pemrosesan ke-k. Waktu pemrosesan pada adalah
satuan waktu, maka produk setengah jadi ke- akan
meninggalkan pada saat . Selain itu pemrosesan
dan dilakukan dengan menggunakan mesin yang sama, maka
hanya dapat memulai pemrosesan ke- segera setelah selesai
mengerjakan pemrosesan sebelumnya yaitu pemrosesan ke- . Sehingga
waktu yang diperlukan adalah .
2) Aturan sinkronisasi pada unit pemrosesan
Waktu saat mulai bekerja untuk pemrosesan ke- dapat
ditentukan sebagai berikut. Jika bahan mentah dimasukkan ke sistem untuk
pemrosesan ke- , maka bahan mentah ini akan tersedia pada input
pemrosesan pada waktu . Akan tetapi, unit
pemrosesan hanya dapat mulai bekerja pada sejumlah bahan baku baru
segera setelah menyelesaikan pemrosesan sebelumnya, yaitu sejumlah
bahan baku untuk pemrosesan ke-k. Waktu pemrosesan pada adalah
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

62
satuan waktu, maka produk setengah jadi ke- akan meninggalkan
pada saat .
3) Aturan sinkronisasi pada unit pemrosesan
Waktu saat mulai bekerja untuk pemrosesan ke- dapat
ditentukan sebagai berikut. Unit pemrosesan dapat mulai bekerja
setelah bahan setengah jadi dari selesai diproses untuk pemrosesan ke-
. Bahan setengah jadi akan tersedia dari pada waktu
. Akan tetapi, unit pemrosesan hanya dapat mulai
bekerja pada sejumlah bahan segera setelah menyelesaikan pemrosesan
sebelumnya, yaitu sejumlah bahan baku untuk pemrosesan ke-k. Waktu
pemrosesan pada adalah satuan waktu, maka produk setengah
jadi ke- akan meninggalkan pada saat .
4) Aturan sinkronisasi pada unit pemrosesan
Waktu saat mulai bekerja untuk pemrosesan ke- dapat
ditentukan sebagai berikut. Unit pemrosesan dapat mulai bekerja
setelah bahan setengah jadi dari selesai diproses untuk pemrosesan ke-
. Bahan setengah jadi akan tersedia dari pada waktu
. Akan tetapi, unit pemrosesan hanya dapat mulai
bekerja pada sejumlah bahan segera setelah menyelesaikan pemrosesan
sebelumnya, yaitu sejumlah bahan baku untuk pemrosesan ke-k. Waktu
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

63
pemrosesan pada adalah satuan waktu, maka produk setengah
jadi ke- akan meninggalkan pada saat .
5) Aturan sinkronisasi pada unit pemrosesan
Waktu saat mulai bekerja untuk pemrosesan ke- dapat
ditentukan sebagai berikut. Unit pemrosesan dapat mulai bekerja
setelah bahan setengah jadi dari dan selesai diproses untuk
pemrosesan ke- . Bahan setengah jadi akan tersedia dari pada
waktu . Bahan setengah jadi akan tersedia dari
pada waktu . Akan tetapi, unit pemrosesan
hanya dapat mulai bekerja pada sejumlah bahan segera setelah
menyelesaikan pemrosesan sebelumnya, yaitu sejumlah bahan baku untuk
pemrosesan ke-k. Waktu pemrosesan pada adalah satuan
waktu, maka produk setengah jadi ke- akan meninggalkan pada saat
.
6) Aturan sinkronisasi pada unit pemrosesan
Waktu saat mulai bekerja untuk pemrosesan ke- dapat
ditentukan sebagai berikut. Unit pemrosesan dapat mulai bekerja
setelah bahan setengah jadi dari dan selesai diproses untuk
pemrosesan ke- . Bahan setengah jadi akan tersedia dari pada
waktu . Bahan setengah jadi akan tersedia dari
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

64
pada waktu . Akan tetapi, unit pemrosesan
hanya dapat mulai bekerja pada sejumlah bahan segera setelah
menyelesaikan pemrosesan sebelumnya, yaitu sejumlah bahan baku untuk
pemrosesan ke-k. Waktu pemrosesan pada adalah satuan
waktu, maka produk setengah jadi ke- akan meninggalkan pada saat
.
7) Aturan Sinkronisasi pada
Waktu saat produk jadi ke- keluar dari sistem adalah saat pemrosesan
pada telah selesai dan meninggalkan , sehingga waktu yang
diperlukan saat produk jadi selesai adalah .
Berdasarkan aturan sinkronisasi model matematika yang dapat
disusun adalah sebagai berikut.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

65
Sistem persamaan di atas dapat dituliskan sebagai :
,
dengan matriks dan yang didefinisikan sebagai berikut.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

66
[
]
,
[ ]
,
[
Berdasarkan matriks yang telah tersusun, kemudian akan dicari nilai
eigen maksimum dari matriks dengan bantuan MATLAB. Nilai eigen
maksimum yang bersesuaian dengan matriks pada sistem di atas adalah 22.
B. Loop Berganda (Multi Loop)
Suatu unit pemrosesan dalam sistem produksi dapat memuat beberapa
loop (tidak hanya satu). Misal untuk suatu unit pemrosesan untuk setiap
satu kali produksi dapat memuat n loop. Hal ini menandakan bahwa unit
pemrosesan melakukan pekerjaan sebanyak kali untuk satu produksi
hingga output tersedia. Berikut ini tersaji graf sistem produksi yang memuat
beberapa loop pada satu unit pemrosesan :
Gambar 3.3 menunjukkan bahwa pada unit pemrosesan terdapat 2
loop yang menandakan bahwa melakukan pekerjaan sebanyak 3 kali dalam
satu kali periode produksi hingga output tersedia. Garis ungu menunjukkan
Gambar 3.3 Graf Sistem Produksi Loop Berganda
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

67
alur produksi untuk pekerjaan kedua, sedangkan garis hijau menunjukkan alur
produksi untuk pekerjaan ketiga. melakukan pekerjaan pertama dan
mendistribusikannya ke , sementara itu kembali melakukan pekerjaan
keduanya dan mendistribusikannya ke . Pekerjaan ketiga pada yang
telah diselesaikan kemudian didistribusikan ke .
Berdasarkan pada Gambar 3.3 kemudian dapat dibuat graf modifikasi
dengan menambahkan unit pemrosesan bayangan sesuai dengan banyaknya
loop yang ada. Graf sistem produksi loop berganda yang dimodifikasi adalah
sebagai berikut.
Gambar 3.4 menunjukkan bahwa unit pemrosesan bayangan dan
ditambahkan untuk merepresentasikan pekerjaan kedua dan ketiga pada
untuk satu kali periode produksi.
Setelah melakukan modifikasi graf, diperlukan penyusunan aturan
sinkronisasi sebelum membuat sistem persamaan linear aljabar max-plus.
Pembuatan aturan sinkronisasi terlebih dulu diawali dengan pemberian nilai
untuk masing-masing waktu transfer dan waktu pemrosesan pada yang sesuai
Gambar 3.4 Graf Sistem Produksi Modifikasi Loop Berganda
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

68
dengan Gambar 3.4. Waktu transfer dan waktu pemrosesan tersaji pada tabel
di bawah ini:
Transfer Waktu (satuan waktu)
Pemrosesan Waktu (satuan waktu)
0 5
1 10
1 10
2 8
2 10
2 12
2 10
5 10
3
3
2
0
Berdasarkan pada Tabel 3.3 dan Tabel 3.4 kemudian disusun aturan
sinkronisasi yang sesuai dengan Gambar 3.4. Pada Gambar 3.4 terlihat bahwa
sistem produksi modifikasi yang ada terdiri dari 8 unit pemrosesan
. Proses produksi tersebut dapat didefinisikan
sebagai berikut.
i) : waktu saat bahan baku dimasukkan ke sistem untuk
pemrosesan ke
ii) : waktu saat bahan dilakukan pemrosesan ke- dan mulai
bekerja untuk pemrosesan ke- dengan waktu pemrosesan sebesar .
iii) : waktu saat produk ke- yang diselesaikan meninggalkan
sistem.
Tabel 3.3 Waktu Transfer Graf
Sistem Produksi Loop Berganda
Tabel 3.4 Waktu Pemrosesan Graf
Sistem Produksi Loop Berganda
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

69
1) Aturan sinkronisasi pada unit pemrosesan
Waktu saat mulai bekerja untuk pemrosesan ke- dapat
ditentukan sebagai berikut. Jika bahan mentah dimasukkan ke sistem
untuk pemrosesan ke- , maka bahan mentah ini akan tersedia pada
input pemrosesan pada waktu . Akan tetapi, unit
pemrosesan hanya dapat mulai bekerja pada sejumlah bahan baku
baru segera setelah menyelesaikan pemrosesan sebelumnya, yaitu
sejumlah bahan baku untuk pemrosesan ke-k. Waktu pemrosesan pada
adalah satuan waktu, maka produk setengah jadi ke- akan
meninggalkan pada saat .
2) Aturan sinkronisasi pada unit pemrosesan
Waktu saat mulai bekerja untuk pemrosesan ke- dapat
ditentukan sebagai berikut. Jika bahan mentah dimasukkan ke sistem
untuk pemrosesan ke- , maka bahan mentah ini akan tersedia pada
input pemrosesan pada waktu . Akan tetapi, unit
pemrosesan hanya dapat mulai bekerja pada sejumlah bahan baku
baru segera setelah menyelesaikan pemrosesan sebelumnya, yaitu
sejumlah bahan baku untuk pemrosesan ke-k. Waktu pemrosesan pada
adalah satuan waktu, maka produk setengah jadi ke- akan
meninggalkan pada saat .
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

70
3) Aturan sinkronisasi pada unit pemrosesan
Waktu saat mulai bekerja untuk pemrosesan ke- dapat
ditentukan sebagai berikut. Unit pemrosesan dapat mulai bekerja
setelah bahan setengah jadi dari selesai diproses untuk pemrosesan ke-
. Bahan setengah jadi akan tersedia dari pada waktu
. Selain itu unit pemrosesan dan
bekerja pada
mesin yang sama, sehingga dapat mulai bekerja untuk pemrosesan
ke- setelah menyelesaikan pemrosesan yakni
. Akan tetapi, unit pemrosesan hanya dapat mulai bekerja pada
sejumlah bahan segera setelah menyelesaikan pemrosesan sebelumnya,
yaitu sejumlah bahan baku untuk pemrosesan ke-k. Waktu pemrosesan
pada adalah satuan waktu, maka produk setengah jadi ke-
akan meninggalkan pada saat .
4) Aturan sinkronisasi pada unit pemrosesan
Waktu saat mulai bekerja untuk pemrosesan ke- dapat
ditentukan sebagai berikut. Unit pemrosesan dapat mulai bekerja
setelah bahan setengah jadi dari dan selesai diproses untuk
pemrosesan ke- . Bahan setengah jadi akan tersedia dari pada
waktu . Bahan setengah jadi akan tersedia dari
pada waktu . Akan tetapi, unit pemrosesan
hanya dapat mulai bekerja pada sejumlah bahan segera setelah
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

71
menyelesaikan pemrosesan sebelumnya, yaitu sejumlah bahan baku
untuk pemrosesan ke-k. Waktu pemrosesan pada adalah satuan
waktu, maka produk setengah jadi ke- akan meninggalkan pada saat
.
5) Aturan sinkronisasi pada unit pemrosesan
Waktu saat mulai bekerja untuk pemrosesan ke- dapat
ditentukan sebagai berikut. Unit pemrosesan dapat mulai bekerja
setelah bahan setengah jadi dari selesai diproses untuk pemrosesan
ke- . Bahan setengah jadi akan tersedia dari pada waktu
. Akan tetapi, unit pemrosesan hanya dapat
mulai bekerja pada sejumlah bahan segera setelah menyelesaikan
pemrosesan sebelumnya, yaitu sejumlah bahan baku untuk pemrosesan
ke-k. Waktu pemrosesan pada adalah satuan waktu, maka
produk setengah jadi ke- akan meninggalkan pada saat
.
6) Aturan sinkronisasi pada unit pemrosesan
Waktu saat mulai bekerja untuk pemrosesan ke- dapat
ditentukan sebagai berikut. Unit pemrosesan dapat mulai bekerja
setelah bahan setengah jadi dari dan selesai diproses untuk
pemrosesan ke- . Bahan setengah jadi akan tersedia dari pada
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

72
waktu . Bahan setengah jadi akan tersedia dari
pada waktu . Akan tetapi, unit pemrosesan
hanya dapat mulai bekerja pada sejumlah bahan segera setelah
menyelesaikan pemrosesan sebelumnya, yaitu sejumlah bahan baku
untuk pemrosesan ke-k. Waktu pemrosesan pada adalah
satuan waktu, maka produk setengah jadi ke- akan meninggalkan
pada saat .
7) Aturan sinkronisasi pada unit pemrosesan
Waktu saat mulai bekerja untuk pemrosesan ke- dapat
ditentukan sebagai berikut. Unit pemrosesan dapat mulai bekerja
setelah bahan setengah jadi dari selesai diproses untuk pemrosesan
ke- . Bahan setengah jadi akan tersedia dari pada waktu
. Akan tetapi, unit pemrosesan hanya dapat
mulai bekerja pada sejumlah bahan segera setelah menyelesaikan
pemrosesan sebelumnya, yaitu sejumlah bahan baku untuk pemrosesan
ke-k. Waktu pemrosesan pada adalah satuan waktu, maka
produk setengah jadi ke- akan meninggalkan pada saat
.
8) Aturan sinkronisasi pada unit pemrosesan
Waktu saat mulai bekerja untuk pemrosesan ke- dapat
ditentukan sebagai berikut. Unit pemrosesan dapat mulai bekerja
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

73
setelah bahan setengah jadi dari dan selesai diproses untuk
pemrosesan ke- . Bahan setengah jadi akan tersedia dari pada
waktu . Bahan setengah jadi akan tersedia dari
pada waktu . Akan tetapi, unit pemrosesan
hanya dapat mulai bekerja pada sejumlah bahan segera setelah
menyelesaikan pemrosesan sebelumnya, yaitu sejumlah bahan baku
untuk pemrosesan ke-k. Waktu pemrosesan pada adalah
satuan waktu, maka produk setengah jadi ke- akan meninggalkan
pada saat .
9) Aturan Sinkronisasi pada
Waktu saat produk jadi ke- keluar dari sistem adalah saat pemrosesan
pada telah selesai dan meninggalkan , sehingga waktu yang
diperlukan saat produk jadi selesai adalah .
Berdasarkan aturan sinkronisasi model matematika yang dapat
disusun adalah sebagai berikut.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

74
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

75
Sistem persamaan tersebut dapat dituliskan sebagai :
,
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

76
dengan matriks dan yang didefinisikan sebagai berikut.
[
]
,
[ ]
,
[
Berdasarkan matriks yang telah tersusun, kemudian dicari nilai eigen
maksimum dari matriks dengan bantuan MATLAB. Nilai eigen maksimum
yang bersesuaian dengan matriks pada sistem di atas adalah 34.
C. Loop Berganda dengan Banyak Titik (Multi Loop Multi Vertex)
Pada bagian ini akan dibahas mengenai graf sistem produksi yang
memiliki beberapa loop pada beberapa titik. Titik pada bahasan ini berarti
unit pemrosesan yang nantinya pada graf akan direpresentasikan dengan
bangun segiempat. Contoh yang akan disajikan merupakan kasus nyata yang
ditemui dalam suatu produksi kue yang telah diamati sebelumnya. Graf yang
terbentuk adalah sebagai berikut.
Gambar 3.5 Graf Sistem Produksi Multi Loop Multi Vertex
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

77
Keterangan :
: waktu proses pemindahan bahan yang akan diproses, i = 1,2,…,34
: waktu saat pencampuran tepung terigu, air, dan butter pada 1
: waktu saat pemisahan kuning telur dan putih telur
: waktu saat pencampuran tepung terigu, air, dan butter pada 2
: waktu saat pencampuran adonan 1 dengan kuning telur
: waktu saat pencampuran putih telur dengan gula pasir
: waktu saat pencampuran 2 adonan dengan kuning telur
: waktu saat pencampuran adonan 1 dengan campuran putih telur
: waktu saat pencampuran adonan 2 dengan campuran putih telur
: waktu saat pemanggangan pada oven
: waktu saat pemanggangan pada oven
: waktu saat proses pendinginan
: waktu saat proses pengepakan
: pencampuran adonan tepung terigu, air, dan butter pada 1
: pemisahan kuning telur dan putih telur
: pencampuran adonan tepung terigu, air, dan butter pada 2
: pencampuran adonan 1 dengan kuning telur
: pencampuran putih telur dengan gula pasir
: pencampuran 2 adonan dengan kuning telur
: pencampuran adonan 1 dengan campuran putih telur
: pencampuran adonan 2 dengan campuran putih telur 2
: pemanggangan lapisan pada oven
: pemanggangan lapisan pada oven
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

78
: proses pendinginan
: proses pengepakan
Gambar 3.5 menunjukkan bahwa pada unit pemrosesan dan
masing-masing memuat 1 loop. Hal ini berarti bahwa dan masing-
masing melakukan 2 pekerjaan untuk setiap satu kali periode produksi. Unit
pemrosesan dan yang memuat masing-masing 5 loop dan 8 loop
melakukan 6 kali pekerjaan dan 9 kali pekerjaan untuk setiap satu kali
periode produksi. Dengan kata lain untuk satu kali produksi kue terjadi proses
pemisahan putih telur dengan kuning telur ( ) sebanyak 2 kali, proses
pencampuran putih telur dengan gula pasir ( ) sebanyak 2 kali, proses
pemanggangan lapisan terjadi sebanyak 15 kali pelapisan (6 kali pada dan
9 kali pada ). Pada sistem produksi di atas, unit pemrosesan dan
bekerja pada mesin yang sama tetapi memiliki bahan dan waktu pemrosesan
yang berbeda sehingga tidak memungkinkan untuk membuat loop pada .
Hal ini membuat dan dipisahkan oleh unit pemrosesan yang berbeda.
Dengan alasan yang sama, hal ini berlaku juga untuk dan . Graf
modifikasi yang dapat dibentuk dari Gambar 3.5 adalah sebagai berikut.
Gambar 3.6 Graf Sistem Produksi Modifikasi Multi Loop Multi Vertex
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

79
Keterangan :
: waktu proses pemindahan bahan yang akan diproses, i = 1,2,…,34
: waktu saat pencampuran adonan tepung terigu, air, dan butter pada 1
: waktu saat pemisahan kuning telur dan putih telur tahap 1
: waktu saat pencampuran adonan tepung terigu, air, dan butter pada 2
: waktu saat pemisahan kuning telur dan putih telur tahap 2
: waktu saat pencampuran adonan 1 dengan kuning telur
: waktu saat pencampuran adonan 2 dengan kuning telur
: waktu saat pencampuran putih telur dengan gula pasir tahap 1
: waktu saat pencampuran adonan 1 dengan campuran putih telur
: waktu saat pencampuran putih telur dengan gula pasir tahap 2
: waktu saat pencampuran adonan 2 dengan campuran putih telur
: waktu saat pemanggangan lapisan pertama pada oven
: waktu saat pemanggangan lapisan kedua pada oven
: waktu saat pemanggangan lapisan ketiga pada oven
: waktu saat pemanggangan lapisan keempat pada oven
: waktu saat pemanggangan lapisan kelima pada oven
: waktu saat pemanggangan lapisan keenam pada oven
: waktu saat pemanggangan lapisan ketujuh pada oven
: waktu saat pemanggangan lapisan kedelapan pada oven
: waktu saat pemanggangan lapisan kesembilan pada oven
: waktu saat pemanggangan lapisan kesepuluh pada oven
: waktu saat pemanggangan lapisan kesebelas pada oven
: waktu saat pemanggangan lapisan kedua belas pada oven
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

80
: waktu saat pemanggangan lapisan ketiga belas pada oven
: waktu saat pemanggangan lapisan keempat belas pada oven
: waktu saat pemanggangan lapisan kelima belas pada oven
: waktu saat proses pendinginan
: waktu saat proses pengepakan
: pencampuran adonan tepung terigu, air, dan butter pada 1
: pemisahan kuning telur dan putih telur tahap 1
: pemisahan kuning telur dan putih telur tahap 2
: pencampuran adonan tepung terigu, air, dan butter pada 2
: pencampuran adonan 1 dengan kuning telur
: pencampuran putih telur dengan gula pasir tahap 1
: pencampuran putih telur dengan gula pasir tahap 2
: pencampuran adonan 2 dengan kuning telur
: pencampuran adonan 1 dengan campuran putih telur
: pencampuran adonan 2 dengan campuran putih telur
: pemanggangan lapisan pertama pada oven
: pemanggangan lapisan kedua pada oven
: pemanggangan lapisan ketiga pada oven
: pemanggangan lapisan keempat pada oven
: pemanggangan lapisan kelima pada oven
: pemanggangan lapisan keenam pada oven
: pemanggangan lapisan ketujuh pada oven
: pemanggangan lapisan kedelapan pada oven
: pemanggangan lapisan kesembilan pada oven
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

81
: pemanggangan lapisan kesepuluh pada oven
: pemanggangan lapisan kesebelas pada oven
: pemanggangan lapisan kedua belas pada oven
: pemanggangan lapisan ketiga belas pada oven
: pemanggangan lapisan keempat belas pada oven
pemanggangan lapisan kelima belas pada oven
: proses pendinginan
: proses pengepakan
Berdasarkan Gambar 3.6, unit pemrosesan bayangan ( ) ditambahkan
untuk merepresentasikan unit pemrosesan yang memuat loop pada . Hal yang
sama juga dilakukan untuk semua unit pemrosesan yang mengandung loop.
Banyaknya unit pemrosesan bayangan yang ditambahkan sesuai dengan
banyaknya loop yang ada pada unit pemrosesan tersebut.
Setelah melakukan modifikasi graf, diperlukan penyusunan aturan
sinkronisasi sebelum membuat sistem persamaan linear aljabar max-plus.
Pembuatan aturan sinkronisasi terlebih dulu diawali dengan pemberian nilai untuk
masing-masing waktu transfer dan waktu pemrosesan pada yang sesuai dengan
Gambar 3.6. Waktu transfer dan waktu pemrosesan tersaji pada tabel di bawah ini
Transfer Waktu (detik) Pemrosesan Waktu (detik)
10 934
5 435
10 934
5 435
Tabel 3.6 Waktu Pemrosesan Graf
Sistem Produksi Multi Loop Multi
Vertex
Tabel 3.5 Waktu Transfer Graf Sistem
Produksi Multi Loop Multi Vertex
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

82
0 295
5 295
5 365
5 295
5 365
0 295
13 212
15 212
13 212
15 212
15 212
85 212
85 212
58 212
48 212
41 212
66 212
41 212
55 212
68 212
66 212
68 2217
80 848
72
86
87
149
82
156
0
Berdasarkan pada Tabel 3.5 dan Tabel 3.6 kemudian disusun aturan
sinkronisasi yang sesuai dengan Gambar 3.6. Pada Gambar 3.6 terlihat bahwa
sistem produksi modifikasi yang ada terdiri dari 27 unit pemrosesan
dan . Proses produksi tersebut dapat
didefinisikan sebagai berikut.
i) : waktu saat bahan baku dimasukkan ke sistem untuk
pemrosesan ke
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

83
ii) : waktu saat bahan dilakukan pemrosesan ke- dan mulai bekerja
untuk pemrosesan ke- dengan waktu pemrosesan sebesar .
iii) : waktu saat produk kue ke- yang diselesaikan meninggalkan
sistem.
1) Aturan sinkronisasi pada
Waktu saat mulai bekerja untuk pemrosesan ke- dapat ditentukan
sebagai berikut. Jika bahan mentah dimasukkan ke sistem untuk pemrosesan
ke- , maka bahan mentah ini akan tersedia pada input pemrosesan
pada waktu . Akan tetapi, unit pemrosesan hanya dapat
mulai bekerja pada sejumlah bahan baku baru segera setelah menyelesaikan
pemrosesan sebelumnya, yaitu sejumlah bahan baku untuk pemrosesan ke-k.
Waktu pemrosesan pada adalah satuan waktu, maka produk
setengah jadi ke- akan meninggalkan pada saat . Selain
itu pemrosesan dan dilakukan dengan menggunakan mesin yang sama,
maka hanya dapat memulai pemrosesan ke- segera setelah
selesai mengerjakan pemrosesan sebelumnya yaitu pemrosesan ke- .
Sehingga waktu yang diperlukan adalah .
2) Aturan Sinkronisasi pada
Waktu saat mulai bekerja untuk pemrosesan ke- dapat ditentukan
sebagai berikut. Jika bahan mentah dimasukkan ke sistem untuk pemrosesan
ke- , maka bahan mentah ini akan tersedia pada input pemrosesan
pada waktu . Akan tetapi, unit pemrosesan hanya dapat
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

84
mulai bekerja pada sejumlah bahan baku baru segera setelah menyelesaikan
pemrosesan sebelumnya, yaitu sejumlah bahan baku untuk pemrosesan ke-k.
Waktu pemrosesan pada adalah satuan waktu, maka produk
setengah jadi ke- akan meninggalkan pada saat . Selain
itu pemrosesan dan
menggunakan mesin yang sama, sehingga
dapat memulai pemrosesan ke- segera setelah menyelesaikan
pemrosesan sebelumnya yakni pemrosesan ke- . Sehingga waktu yang
diperlukan adalah
3) Aturan Sinkronisasi pada
Waktu saat mulai bekerja untuk pemrosesan ke- dapat ditentukan
sebagai berikut. Unit pemrosesan akan mulai bekerja setelah bahan
setengah jadi dari selesai diproses untuk pemrosesan ke- . Bahan
setengah jadi akan tersedia dari pada waktu .
Akan tetapi, unit pemrosesan hanya dapat mulai bekerja pada sejumlah
bahan setengah jadi segera setelah menyelesaikan pemrosesan sebelumnya,
yaitu sejumlah bahan setengah jadi untuk pemrosesan ke-k. Waktu
pemrosesan pada adalah satuan waktu, maka produk setengah
jadi ke- akan meninggalkan pada saat .
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

85
4) Aturan Sinkronisasi pada
Waktu saat mulai bekerja untuk pemrosesan ke- dapat ditentukan
sebagai berikut. Jika bahan mentah dimasukkan ke sistem untuk pemrosesan
ke- , maka bahan mentah ini akan tersedia pada input pemrosesan
pada waktu . Akan tetapi, unit pemrosesan hanya dapat
mulai bekerja pada sejumlah bahan baku baru segera setelah menyelesaikan
pemrosesan sebelumnya, yaitu sejumlah bahan baku untuk pemrosesan ke-k.
Waktu pemrosesan pada adalah satuan waktu, maka produk
setengah jadi ke- akan meninggalkan pada saat . Selain
itu, pemrosesan dan menggunakan mesin yang sama, maka hanya
dapat memulai pemrosesan ke- segera setelah selesai mengerjakan
pemrosesan sebelumnya yaitu pemrosesan ke- . Sehingga waktu yang
diperlukan adalah .
5) Aturan Sinkronisasi pada
Waktu saat mulai bekerja untuk pemrosesan ke- dapat ditentukan
sebagai berikut. Unit pemrosesan akan mulai bekerja setelah bahan
setengah jadi dari dan selesai diproses untuk pemrosesan ke- .
Sehingga bahan setengah jadi akan tersedia dari pada waktu
dan tersedia dari pada waktu
. Akan tetapi, unit pemrosesan hanya dapat mulai bekerja pada
sejumlah bahan setengah jadi segera setelah menyelesaikan pemrosesan
sebelumnya, yaitu sejumlah bahan setengah jadi untuk pemrosesan ke-k.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

86
Waktu pemrosesan pada adalah satuan waktu, maka produk
setengah jadi ke- akan meninggalkan pada saat .
6) Aturan Sinkronisasi pada
Waktu saat mulai bekerja untuk pemrosesan ke- dapat ditentukan
sebagai berikut. Unit pemrosesan akan mulai bekerja setelah bahan
setengah jadi dari selesai diproses untuk pemrosesan ke- .
Sehingga bahan setengah jadi akan tersedia dari pada waktu
. Unit pemrosesan dan
menggunakan mesin
yang sama sehingga dapat memulai pemrosesan ke- pada waktu
Akan tetapi, unit pemrosesan hanya dapat mulai
bekerja pada sejumlah bahan setengah jadi segera setelah menyelesaikan
pemrosesan sebelumnya, yaitu sejumlah bahan setengah jadi untuk
pemrosesan ke-k. Waktu pemrosesan pada adalah satuan
waktu, maka produk setengah jadi ke- akan meninggalkan pada saat
.
7) Aturan Sinkronisasi pada
Waktu saat mulai bekerja untuk pemrosesan ke- dapat ditentukan
sebagai berikut. Unit pemrosesan akan mulai bekerja setelah bahan
setengah jadi dari dan
selesai diproses untuk pemrosesan ke- .
Sehingga bahan setengah jadi akan tersedia dari pada waktu
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

87
serta akan tersedia dari pada waktu
Akan tetapi, unit pemrosesan hanya dapat mulai
bekerja pada sejumlah bahan setengah jadi segera setelah menyelesaikan
pemrosesan sebelumnya, yaitu sejumlah bahan setengah jadi untuk
pemrosesan ke-k. Waktu pemrosesan pada adalah satuan waktu,
maka produk setengah jadi ke- akan meninggalkan pada saat
.
8) Aturan Sinkronisasi pada
Waktu saat mulai bekerja untuk pemrosesan ke- dapat ditentukan
sebagai berikut. Unit pemrosesan akan mulai bekerja setelah bahan
setengah jadi dari dan selesai diproses untuk pemrosesan ke- .
Sehingga bahan setengah jadi akan tersedia dari pada waktu
dan akan tersedia dari pada waktu
. Akan tetapi, unit pemrosesan hanya dapat mulai bekerja pada
sejumlah bahan setengah jadi segera setelah menyelesaikan pemrosesan
sebelumnya, yaitu sejumlah bahan setengah jadi untuk pemrosesan ke-k.
Waktu pemrosesan pada adalah satuan waktu, maka produk
setengah jadi ke- akan meninggalkan pada saat .
9) Aturan Sinkronisasi pada
Waktu saat mulai bekerja untuk pemrosesan ke- dapat ditentukan
sebagai berikut. Unit pemrosesan akan mulai bekerja setelah bahan
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

88
setengah jadi dari dan selesai diproses untuk pemrosesan ke- .
Sehingga bahan setengah jadi akan tersedia dari pada waktu
serta akan tersedia dari pada waktu
Akan tetapi, unit pemrosesan hanya dapat mulai
bekerja pada sejumlah bahan setengah jadi segera setelah menyelesaikan
pemrosesan sebelumnya, yaitu sejumlah bahan setengah jadi untuk
pemrosesan ke-k. Waktu pemrosesan pada adalah satuan waktu,
maka produk setengah jadi ke- akan meninggalkan pada saat
.
10) Aturan Sinkronisasi pada
Waktu saat mulai bekerja untuk pemrosesan ke- dapat ditentukan
sebagai berikut. Unit pemrosesan akan mulai bekerja setelah bahan
setengah jadi dari dan selesai diproses untuk pemrosesan ke- .
Sehingga bahan setengah jadi akan tersedia dari pada waktu
serta akan tersedia dari pada waktu
. Akan tetapi, unit pemrosesan hanya dapat mulai
bekerja pada sejumlah bahan setengah jadi segera setelah menyelesaikan
pemrosesan sebelumnya, yaitu sejumlah bahan setengah jadi untuk
pemrosesan ke-k. Waktu pemrosesan pada adalah satuan
waktu, maka produk setengah jadi ke- akan meninggalkan pada saat
.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

89
11) Aturan Sinkronisasi pada
Waktu saat mulai bekerja untuk pemrosesan ke- dapat ditentukan
sebagai berikut. Unit pemrosesan akan mulai bekerja setelah bahan
setengah jadi dari selesai diproses untuk pemrosesan ke- . Sehingga
bahan setengah jadi akan tersedia dari pada waktu
. Akan tetapi, unit pemrosesan hanya dapat mulai bekerja pada
sejumlah bahan setengah jadi segera setelah menyelesaikan pemrosesan
sebelumnya, yaitu sejumlah bahan setengah jadi untuk pemrosesan ke-k.
Waktu pemrosesan pada adalah satuan waktu, maka produk
setengah jadi ke- akan meninggalkan pada saat .
Selain itu, pemrosesan pada sampai
menggunakan mesin yang sama
sehingga dapat memulai proses ke- setelah
menyelesaikan
pemrosesan ke- . Produk setengah jadi ke- meninggalkan pada waktu
.
12) Aturan Sinkronisasi pada
Waktu saat mulai bekerja untuk pemrosesan ke- dapat ditentukan
sebagai berikut. Unit pemrosesan akan mulai bekerja setelah bahan
setengah jadi dari selesai diproses untuk pemrosesan ke- .
Sehingga bahan setengah jadi akan tersedia dari pada waktu
. Akan tetapi, unit pemrosesan hanya dapat mulai
bekerja pada sejumlah bahan setengah jadi segera setelah menyelesaikan
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

90
pemrosesan sebelumnya, yaitu sejumlah bahan setengah jadi untuk
pemrosesan ke-k. Waktu pemrosesan pada adalah satuan
waktu, maka produk setengah jadi ke- akan meninggalkan pada saat
.
13) Aturan Sinkronisasi pada
Waktu saat mulai bekerja untuk pemrosesan ke- dapat ditentukan
sebagai berikut. Unit pemrosesan akan mulai bekerja setelah bahan
setengah jadi dari selesai diproses untuk pemrosesan ke- .
Sehingga bahan setengah jadi akan tersedia dari pada waktu
. Akan tetapi, unit pemrosesan hanya dapat mulai
bekerja pada sejumlah bahan setengah jadi segera setelah menyelesaikan
pemrosesan sebelumnya, yaitu sejumlah bahan setengah jadi untuk
pemrosesan ke-k. Waktu pemrosesan pada adalah satuan
waktu, maka produk setengah jadi ke- akan meninggalkan pada saat
.
14) Aturan Sinkronisasi pada
Waktu saat mulai bekerja untuk pemrosesan ke- dapat ditentukan
sebagai berikut. Unit pemrosesan akan mulai bekerja setelah bahan
setengah jadi dari selesai diproses untuk pemrosesan ke- .
Sehingga bahan setengah jadi akan tersedia dari pada waktu
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

91
. Akan tetapi, unit pemrosesan hanya dapat mulai
bekerja pada sejumlah bahan setengah jadi segera setelah menyelesaikan
pemrosesan sebelumnya, yaitu sejumlah bahan setengah jadi untuk
pemrosesan ke-k. Waktu pemrosesan pada adalah satuan
waktu, maka produk setengah jadi ke- akan meninggalkan pada saat
.
15) Aturan Sinkronisasi pada
Waktu saat mulai bekerja untuk pemrosesan ke- dapat ditentukan
sebagai berikut. Unit pemrosesan akan mulai bekerja setelah bahan
setengah jadi dari selesai diproses untuk pemrosesan ke- .
Sehingga bahan setengah jadi akan tersedia dari pada waktu
. Akan tetapi, unit pemrosesan hanya dapat mulai
bekerja pada sejumlah bahan setengah jadi segera setelah menyelesaikan
pemrosesan sebelumnya, yaitu sejumlah bahan setengah jadi untuk
pemrosesan ke-k. Waktu pemrosesan pada adalah satuan
waktu, maka produk setengah jadi ke- akan meninggalkan pada saat
.
16) Aturan Sinkronisasi pada
Waktu saat mulai bekerja untuk pemrosesan ke- dapat ditentukan
sebagai berikut. Unit pemrosesan akan mulai bekerja setelah bahan
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

92
setengah jadi dari selesai diproses untuk pemrosesan ke- .
Sehingga bahan setengah jadi akan tersedia dari pada waktu
. Akan tetapi, unit pemrosesan hanya dapat mulai
bekerja pada sejumlah bahan setengah jadi segera setelah menyelesaikan
pemrosesan sebelumnya, yaitu sejumlah bahan setengah jadi untuk
pemrosesan ke-k. Waktu pemrosesan pada adalah satuan
waktu, maka produk setengah jadi ke- akan meninggalkan pada saat
.
17) Aturan Sinkronisasi pada
Waktu saat mulai bekerja untuk pemrosesan ke- dapat ditentukan
sebagai berikut. Unit pemrosesan akan mulai bekerja setelah bahan
setengah jadi dari dan selesai diproses untuk pemrosesan ke- .
Sehingga bahan setengah jadi akan tersedia dari pada waktu
serta akan tersedia dari pada waktu
. Akan tetapi, unit pemrosesan hanya dapat
mulai bekerja pada sejumlah bahan setengah jadi segera setelah
menyelesaikan pemrosesan sebelumnya, yaitu sejumlah bahan setengah jadi
untuk pemrosesan ke-k. Waktu pemrosesan pada adalah
satuan waktu, maka produk setengah jadi ke- akan meninggalkan pada
saat .
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

93
18) Aturan Sinkronisasi pada
Waktu saat mulai bekerja untuk pemrosesan ke- dapat ditentukan
sebagai berikut. Unit pemrosesan akan mulai bekerja setelah bahan
setengah jadi dari selesai diproses untuk pemrosesan ke- .
Sehingga bahan setengah jadi akan tersedia dari pada waktu
. Akan tetapi, unit pemrosesan hanya dapat
mulai bekerja pada sejumlah bahan setengah jadi segera setelah
menyelesaikan pemrosesan sebelumnya, yaitu sejumlah bahan setengah jadi
untuk pemrosesan ke-k. Waktu pemrosesan pada adalah
satuan waktu, maka produk setengah jadi ke- akan meninggalkan pada
saat .
19) Aturan Sinkronisasi pada
Waktu saat mulai bekerja untuk pemrosesan ke- dapat ditentukan
sebagai berikut. Unit pemrosesan akan mulai bekerja setelah bahan
setengah jadi dari selesai diproses untuk pemrosesan ke- .
Sehingga bahan setengah jadi akan tersedia dari pada waktu
. Akan tetapi, unit pemrosesan hanya dapat
mulai bekerja pada sejumlah bahan setengah jadi segera setelah
menyelesaikan pemrosesan sebelumnya, yaitu sejumlah bahan setengah jadi
untuk pemrosesan ke-k. Waktu pemrosesan pada adalah
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

94
satuan waktu, maka produk setengah jadi ke- akan meninggalkan pada
saat .
20) Aturan Sinkronisasi pada
Waktu saat mulai bekerja untuk pemrosesan ke- dapat ditentukan
sebagai berikut. Unit pemrosesan akan mulai bekerja setelah bahan
setengah jadi dari selesai diproses untuk pemrosesan ke- .
Sehingga bahan setengah jadi akan tersedia dari pada waktu
. Akan tetapi, unit pemrosesan hanya dapat
mulai bekerja pada sejumlah bahan setengah jadi segera setelah
menyelesaikan pemrosesan sebelumnya, yaitu sejumlah bahan setengah jadi
untuk pemrosesan ke-k. Waktu pemrosesan pada adalah
satuan waktu, maka produk setengah jadi ke- akan meninggalkan pada
saat .
21) Aturan Sinkronisasi pada
Waktu saat mulai bekerja untuk pemrosesan ke- dapat ditentukan
sebagai berikut. Unit pemrosesan akan mulai bekerja setelah bahan
setengah jadi dari selesai diproses untuk pemrosesan ke- .
Sehingga bahan setengah jadi akan tersedia dari pada waktu
. Akan tetapi, unit pemrosesan hanya dapat
mulai bekerja pada sejumlah bahan setengah jadi segera setelah
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

95
menyelesaikan pemrosesan sebelumnya, yaitu sejumlah bahan setengah jadi
untuk pemrosesan ke-k. Waktu pemrosesan pada adalah
satuan waktu, maka produk setengah jadi ke- akan meninggalkan pada
saat .
22) Aturan Sinkronisasi pada
Waktu saat mulai bekerja untuk pemrosesan ke- dapat ditentukan
sebagai berikut. Unit pemrosesan akan mulai bekerja setelah bahan
setengah jadi dari selesai diproses untuk pemrosesan ke- .
Sehingga bahan setengah jadi akan tersedia dari pada waktu
. Akan tetapi, unit pemrosesan hanya dapat
mulai bekerja pada sejumlah bahan setengah jadi segera setelah
menyelesaikan pemrosesan sebelumnya, yaitu sejumlah bahan setengah jadi
untuk pemrosesan ke-k. Waktu pemrosesan pada adalah
satuan waktu, maka produk setengah jadi ke- akan meninggalkan pada
saat .
23) Aturan Sinkronisasi pada
Waktu saat mulai bekerja untuk pemrosesan ke- dapat ditentukan
sebagai berikut. Unit pemrosesan akan mulai bekerja setelah bahan
setengah jadi dari selesai diproses untuk pemrosesan ke- .
Sehingga bahan setengah jadi akan tersedia dari pada waktu
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

96
. Akan tetapi, unit pemrosesan hanya dapat
mulai bekerja pada sejumlah bahan setengah jadi segera setelah
menyelesaikan pemrosesan sebelumnya, yaitu sejumlah bahan setengah jadi
untuk pemrosesan ke-k. Waktu pemrosesan pada adalah
satuan waktu, maka produk setengah jadi ke- akan meninggalkan pada
saat .
24) Aturan Sinkronisasi pada
Waktu saat mulai bekerja untuk pemrosesan ke- dapat ditentukan
sebagai berikut. Unit pemrosesan akan mulai bekerja setelah bahan
setengah jadi dari selesai diproses untuk pemrosesan ke- .
Sehingga bahan setengah jadi akan tersedia dari pada waktu
. Akan tetapi, unit pemrosesan hanya dapat
mulai bekerja pada sejumlah bahan setengah jadi segera setelah
menyelesaikan pemrosesan sebelumnya, yaitu sejumlah bahan setengah jadi
untuk pemrosesan ke-k. Waktu pemrosesan pada adalah
satuan waktu, maka produk setengah jadi ke- akan meninggalkan pada
saat .
25) Aturan Sinkronisasi pada
Waktu saat mulai bekerja untuk pemrosesan ke- dapat ditentukan
sebagai berikut. Unit pemrosesan akan mulai bekerja setelah bahan
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

97
setengah jadi dari selesai diproses untuk pemrosesan ke- .
Sehingga bahan setengah jadi akan tersedia dari pada waktu
. Akan tetapi, unit pemrosesan hanya dapat
mulai bekerja pada sejumlah bahan setengah jadi segera setelah
menyelesaikan pemrosesan sebelumnya, yaitu sejumlah bahan setengah jadi
untuk pemrosesan ke-k. Waktu pemrosesan pada adalah
satuan waktu, maka produk setengah jadi ke- akan meninggalkan pada
saat .
26) Aturan Sinkronisasi pada
Waktu saat mulai bekerja untuk pemrosesan ke- dapat ditentukan
sebagai berikut. Unit pemrosesan akan mulai bekerja setelah bahan
setengah jadi dari selesai diproses untuk pemrosesan ke- .
Sehingga bahan setengah jadi akan tersedia dari pada waktu
. Akan tetapi, unit pemrosesan hanya dapat mulai
bekerja pada sejumlah bahan setengah jadi segera setelah menyelesaikan
pemrosesan sebelumnya, yaitu sejumlah bahan setengah jadi untuk
pemrosesan ke-k. Waktu pemrosesan pada adalah satuan
waktu, maka produk setengah jadi ke- akan meninggalkan pada saat
.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

98
27) Aturan Sinkronisasi pada
Waktu saat mulai bekerja untuk pemrosesan ke- dapat ditentukan
sebagai berikut. Unit pemrosesan akan mulai bekerja setelah bahan
setengah jadi dari selesai diproses untuk pemrosesan ke- .
Sehingga bahan setengah jadi akan tersedia dari pada waktu
. Akan tetapi, unit pemrosesan hanya dapat
mulai bekerja pada sejumlah bahan setengah jadi segera setelah
menyelesaikan pemrosesan sebelumnya, yaitu sejumlah bahan setengah jadi
untuk pemrosesan ke-k. Waktu pemrosesan pada adalah
satuan waktu, maka produk setengah jadi ke- akan meninggalkan pada
saat .
28) Aturan Sinkronisasi pada
Waktu saat produk jadi ke- keluar dari sistem adalah saat pemrosesan pada
telah selesai dan meninggalkan , sehingga waktu yang diperlukan saat
produk jadi selesai adalah .
Berdasarkan aturan sinkronisasi model matematika yang dapat disusun
adalah sebagai berikut.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

99
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

100
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

101
,
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

102
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

103
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

104
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

105
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

106
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

107
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

108
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

109
Sistem persamaan di atas dapat dituliskan sebagai :
,
dengan matriks dan yang didefinisikan pada tabel-tabel selanjutnya.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

110
Matriks adalah sebagai berikut.
KOLOM
1 2 3 4 5 6 7 8 9 10 11 12 13
BARIS
1 934 -inf -inf -inf 295 -inf -inf -inf -inf -inf -inf -inf -inf
2 -inf 435 -inf 435 -inf -inf -inf -inf -inf -inf -inf -inf -inf
3 -inf -inf 934 -inf -inf 295 -inf -inf -inf -inf -inf -inf -inf
4 -inf 875 -inf 875 -inf -inf -inf -inf -inf -inf -inf -inf -inf
5 1868 875 -inf 875 1229 -inf -inf -inf -inf -inf -inf -inf -inf
6 -inf 1315 1868 1315 -inf 1229 -inf -inf -inf -inf -inf -inf -inf
7 -inf 875 -inf 875 -inf -inf 365 -inf 365 -inf -inf -inf -inf
8 2176 1255 -inf 1255 1537 -inf 745 295 745 -inf -inf -inf -inf
9 -inf 1315 -inf 1315 -inf -inf 745 -inf 745 -inf -inf -inf -inf
10 -inf 1695 2176 1695 -inf 1537 1125 -inf 1125 295 -inf -inf -inf
11 2556 1635 -inf 1635 1917 -inf 1125 675 1125 -inf 212 -inf -inf
12 2826 1905 -inf 1905 2187 -inf 1395 945 1395 -inf 482 212 -inf
13 3086 2165 -inf 2165 2447 -inf 1655 1205 1655 -inf 742 472 212
14 3339 2418 -inf 2418 2700 -inf 1908 1458 1908 -inf 995 725 465
15 3617 2696 -inf 2696 2978 -inf 2186 1736 2186 -inf 1273 1003 743
16 3870 2949 -inf 2949 3231 -inf 2439 1989 2439 -inf 1526 1256 996
17 4137 3216 2556 3216 3498 1917 2706 2256 2706 675 1793 1523 1263
18 4417 3496 2836 3496 3778 2197 2986 2536 2986 955 2073 1803 1543
19 4695 3774 3114 3774 4056 2475 3264 2814 3264 1233 2351 2081 1821
20 4975 4054 3394 4054 4336 2755 3544 3094 3544 1513 2631 2361 2101
21 5267 4346 3686 4346 4628 3047 3836 3386 3836 1805 2923 2653 2393
22 5551 4630 3970 4630 4912 3331 4120 3670 4120 2089 3207 2937 2677
23 5849 4928 4268 4928 5210 3629 4418 3968 4418 2387 3505 3235 2975
24 6148 5227 4567 5227 5509 3928 4717 4267 4717 2686 3804 3534 3274
25 6509 5588 4928 5588 5870 4289 5078 4628 5078 3047 4165 3895 3635
26 6803 5882 5222 5882 6164 4583 5372 4922 5372 3341 4459 4189 3929
27 9176 8255 7595 8255 8537 6956 7745 7295 7745 5714 6832 6562 6302
Tabel 3.7 Matriks A Graf Multi Loop Multi Vertex Kolom 1-13
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

111
KOLOM
14 15 16 17 18 19 20 21 22 23 24 25 26 27
BARIS
1 -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf
2 -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf
3 -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf
4 -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf
5 -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf
6 -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf
7 -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf
8 -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf
9 -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf
10 -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf
11 -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf 212 -inf -inf
12 -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf 482 -inf -inf
13 -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf 742 -inf -inf
14 212 -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf 995 -inf -inf
15 490 212 -inf -inf -inf -inf -inf -inf -inf -inf -inf 1273 -inf -inf
16 743 465 212 -inf -inf -inf -inf -inf -inf -inf -inf 1526 -inf -inf
17 1010 732 479 212 -inf -inf -inf -inf -inf -inf -inf 1793 -inf -inf
18 1290 1012 759 492 212 -inf -inf -inf -inf -inf -inf 2073 -inf -inf
19 1568 1290 1037 770 490 212 -inf -inf -inf -inf -inf 2351 -inf -inf
20 1848 1570 1317 1050 770 492 212 -inf -inf -inf -inf 2631 -inf -inf
21 2140 1862 1609 1342 1062 784 504 212 -inf -inf -inf 2923 -inf -inf
22 2424 2146 1893 1626 1346 1068 788 496 212 -inf -inf 3207 -inf -inf
23 2722 2444 2191 1924 1644 1366 1086 794 510 212 -inf 3505 -inf -inf
24 3021 2743 2490 2223 1943 1665 1385 1093 809 511 212 3804 -inf -inf
25 3382 3104 2851 2584 2304 2026 1746 1454 1170 872 573 4165 -inf -inf
26 3676 3398 3145 2878 2598 2320 2040 1748 1464 1166 867 4459 2217 -inf
27 6049 5771 5518 5251 4971 4693 4413 4121 3837 3539 3240 6832 4590 848
Tabel 3.8 Tabel Matriks A Graf Multi Loop Multi Vertex Kolom 14-27
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

112
Matriks :
KOLOM
1
BARIS
1 10
2 5
3 10
4 445
5 944
6 944
7 445
8 1252
9 885
10 1265
11 1632
12 1902
13 2162
14 2415
15 2693
16 2946
17 3213
18 3493
19 3771
20 4051
21 4343
22 4627
23 4925
24 5224
25 5585
26 5879
27 8252
Matriks :
KOLOM
1 2 3 4 5 6 7 8 9 10 11 12 13 14
BARIS 1 -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf
15 16 17 18 19 20 21 22 23 24 25 26 27
BARIS 1 -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf 848
Tabel 3.9 Matriks B Graf Multi Loop
Multi Vertex
Tabel 3.10 Matriks C Graf Multi Loop Multi Vertex
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

113
Berdasarkan matriks yang telah tersusun, kemudian akan dicari nilai
eigen maksimum dari matriks dengan bantuan MATLAB. Nilai eigen
maksimum yang bersesuaian dengan matriks pada sistem di atas adalah
4165.
D. Analisis Model
Selanjutnya akan dilakukan analisis berdasarkan pengamatan yang
dilakukan terhadap beberapa graf yang disajikan. Pengamatan pertama
dilakukan pada graf sistem produksi ber-loop tunggal. Loop tunggal yang
disajikan merupakan graf sistem produksi yang hanya memiliki satu loop.
Unit pemrosesan yang ada pada Gambar 3.1 (graf sistem produksi loop
tunggal) sebanyak 5 unit. Unit pemrosesan yang ada pada Gambar 3.2 (graf
sistem produksi modifikasi loop tunggal) sebanyak 6 unit.Unit pemrosesan
yang awalnya sebanyak 5 unit bertambah menjadi 6 unit karena terdapat satu
loop.
Entry matriks pada diagonal utama menunjukkan lama waktu yang
dibutuhkan dari suatu unit pemrosesan untuk menyelesaikan pekerjaannya.
Dapat dilihat bahwa pada diagonal utama , entry dan
berturut-turut menunjukkan lama waktu
untuk
menyelesaikan pekerjaannya. Nilai dan secara berturut-
turut merupakan dan . Perbedaan terjadi pada yang
merepresentasikan waktu menyelesaikan pekerjaannya.
merupakan
unit pemrosesan bayangan yang digunakan untuk menunjukkan pekerjaan
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

114
kedua dari , sehingga waktu untuk menyelesaikan pekerjaan hingga dapat
memulai pekerjaan selanjutnya harus menunggu selesai. Nilai 22 pada
diperoleh dari waktu proses ( ditambah waktu transfer untuk
memastikan mesin sudah kosong dan siap dimulai pekerjaan selanjutnya ,
dan ditambah waktu proses ( . Nilai 22 pada juga merupakan nilai
eigen maksimum dari matriks . Dengan kata lain waktu pemrosesan terlama
yang dibutuhkan suatu mesin pada contoh tersebut untuk menyelesaikan
pekerjaannya adalah 22 satuan waktu yang dalam kasus ini merupakan
pemrosesan pada .
Pengamatan selanjutnya dilakukan pada graf sistem produksi ber-loop
ganda. Multi loop yang disajikan merupakan graf sistem produksi yang
memiliki lebih dari satu loop. Unit pemrosesan yang ada pada Gambar 3.3
(graf sistem produksi loop ganda) sebanyak 6 unit. Unit pemrosesan yang ada
pada Gambar 3.4 (graf sistem produksi modifikasi loop ganda) sebanyak 8
unit. Unit pemrosesan yang awalnya sebanyak 6 unit bertambah menjadi 8
unit karena terdapat dua loop.
Sama seperti pada loop tunggal, entry matriks pada diagonal utama
menunjukkan lama waktu yang dibutuhkan dari suatu unit pemrosesan untuk
menyelesaikan pekerjaannya. Pada diagonal utama matriks , entry terbesar
terlihat pada yang merupakan waktu menyelesaikan pekerjaannya.
merepresentasikan pekerjaan ketiga pada unit pemrosesan
. Sehingga
dapat menyelesaikan pekerjaannya pada waktu
, dan
selesai
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

115
bekerja. Nilai 34 yang merupakan entry memiliki nilai yang sama dengan
nilai eigen maksimum matriks . Dengan kata lain waktu pemrosesan terlama
yang dibutuhkan suatu mesin pada contoh tersebut untuk menyelesaikan
pekerjaannya adalah 34 satuan waktu yang dalam kasus ini merupakan
pemrosesan pada .
Pengamatan yang terakhit dilakukan pada graf sistem produksi ber-
loop ganda dengan beberapa titik (Multi loop multi vertex). Multi loop multi
vertex yang disajikan merupakan graf sistem produksi yang memiliki lebih
dari satu loop pada beberapa mesin. Unit pemrosesan yang ada pada Gambar
3.5 (graf sistem produksi multi loop multi vertex) sebanyak 12 unit. Unit
pemrosesan yang ada pada Gambar 3.6 (graf sistem produksi modifikasi multi
loop multi vertex) sebanyak 27 unit.Unit pemrosesan yang awalnya sebanyak
12 unit bertambah menjadi 27 unit karena berdasarkan Gambar 3.5 terdapat
15 loop yang terdiri dari 1 loop pada dan , 5 loop pada , dan 8 loop
pada .
Sama seperti pada loop tunggal dan loop ganda, entry matriks pada
diagonal utama menunjukkan lama waktu yang dibutuhkan dari suatu unit
pemrosesan untuk menyelesaikan pekerjaannya. Pada diagonal utama matriks
, entry terbesar terlihat pada yang merupakan waktu
menyelesaikan pekerjaannya. merepresentasikan pekerjaan kesembilan
pada unit pemrosesan . Selain itu karena mesin yang digunakan pada unit
pemrosesan sama dengan
maka dapat menyelesaikan
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

116
pekerjaannya pada waktu ,
, hingga selesai bekerja. Nilai 4165
yang merupakan entry memiliki nilai yang sama dengan nilai eigen
maksimum matriks . Dengan kata lain waktu pemrosesan terlama yang
dibutuhkan suatu mesin pada contoh tersebut untuk menyelesaikan
pekerjaannya adalah 4165 satuan waktu yang dalam kasus ini merupakan
pemrosesan pada .
Berdasarkan pengamatan yang dilakukan dapat dilihat bahwa
banyaknya unit pemrosesan modifikasi setara dengan jumlahan unit
pemrosesan ber-loop ditambah dengan banyaknya loop. Hal ini dapat
dirumuskan sebagai berikut:
Teorema 3.1
Jika suatu graf ber-loop memiliki unit pemrosesan dan memiliki total loop
sebanyak , maka banyaknya unit pemrosesan modifikasi yang terjadi
sebanyak .
Bukti :
Diberikan suatu graf dengan unit pemrosesan tak identik dan .
menandakan terdapat pemrosesan identik yang terjadi sehingga terdapat
unit pemrosesan. Banyaknya unit pemrosesan yang terjadi atau .
Selain itu terdapat perbedaan pada entry matriks diagonal utama yang
menunjukkan waktu proses unit pemrosesan bayangan. Entry yang
menunjukkan unit pemrosesan bayangan merupakan hasil penjumlahan dari
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

117
waktu proses unit pemrosesan asal dan waktu transfernya, sehingga dapat
dirumuskan sebagai berikut.
Teorema 3.2
Jika menunjukkan suatu unit pemrosesan dengan loop sebanyak dan
menunjukkan unit pemrosesan bayangan ke- maka pada matriks sama
dengan , dengan menunjukkan waktu pemrosesan pada
unit pemrosesan dan menunjukkan total waktu transfer dari hingga .
Bukti : Diberikan suatu graf seperti berikut.
Diambil : ⨂
Untuk
Karena dan bekerja pada mesin yang sama, waktu pemrosesan yang
dibutuhkan sampai selesai harus menunggu selesai. Waktu yang
diperlukan untuk menyelesaikan pekerjaan pada adalah
1 mesin
Gambar 3.7 Graf Sistem Produksi dengan n loop
Gambar 3.8 Graf Sistem Produksi Modifikasi n loop pada loop pertama
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

118
Untuk
Dengan prinsip yang sama, waktu pemrosesan sampai selesai harus
menunggu pemrosesan selesai pemrosesan. Sehingga waktu yang
diperlukan untuk mesin tersebut hingga menyelesaikan pekerjaan sama
dengan waktu proses untuk menyelesaikan ditambah dengan waktu
transfer ditambah dengan waktu pemrosesan pada sehingga dapat
dituliskan :
⨂
Dengan menggunakan prinsip yang sama, pada
Waktu pemrosesan hingga dapat ditulistkan :
⨂ ⨂
⨂
Karena waktu merosesan menunjukkan lama waktu
dapat memulai pekerjaan ke- setelah menyelesaikan pekerjaan ke-
dengan maka menurut Definisi 2.16, lama waktu pemrosesan
pada unit pemrosesan jika disajikan ke dalam bentuk matriksnya akan
bersesuaian dengan . Hal ini mengakibatkan, .
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

119
BAB IV
ANALISIS WAKTU OPTIMUM DAN PENJADWALAN PRODUKSI
SECARA PERIODIK
A. Analisis Barisan Keadaan Sistem dan Output
Pada bagian ini dibuat analisis atas persamaan yang telah diperoleh
dari graf sistem produksi modifikasi. Analisis ini dilakukan dengan cara
menghitung barisan keadaan sistem dan barisan output sistem dengan bantuan
program MATLAB. Berdasarkan hasil yang diperoleh, dapat ditentukan waktu
optimum serta dapat dibuat jadwal produksi yang periodik.
Perhitungan barisan keadaan sistem dan barisan output sistem pada
Gambar 3.2 dimulai dengan memberikan kondisi awal ( sebagai berikut.
[ – – – –
Selain dengan memberikan input kondisi awal diberikan pula input
berupa matriks dan seperti yang telah dijelaskan pada Bab III. Hasil
dari perhitungan barisan keadaan sistem dan barisan output pada Gambar 3.2
dengan menggunakan program MATLAB untuk dengan
barisan input [ akan tersaji dalam Tabel 4.1.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
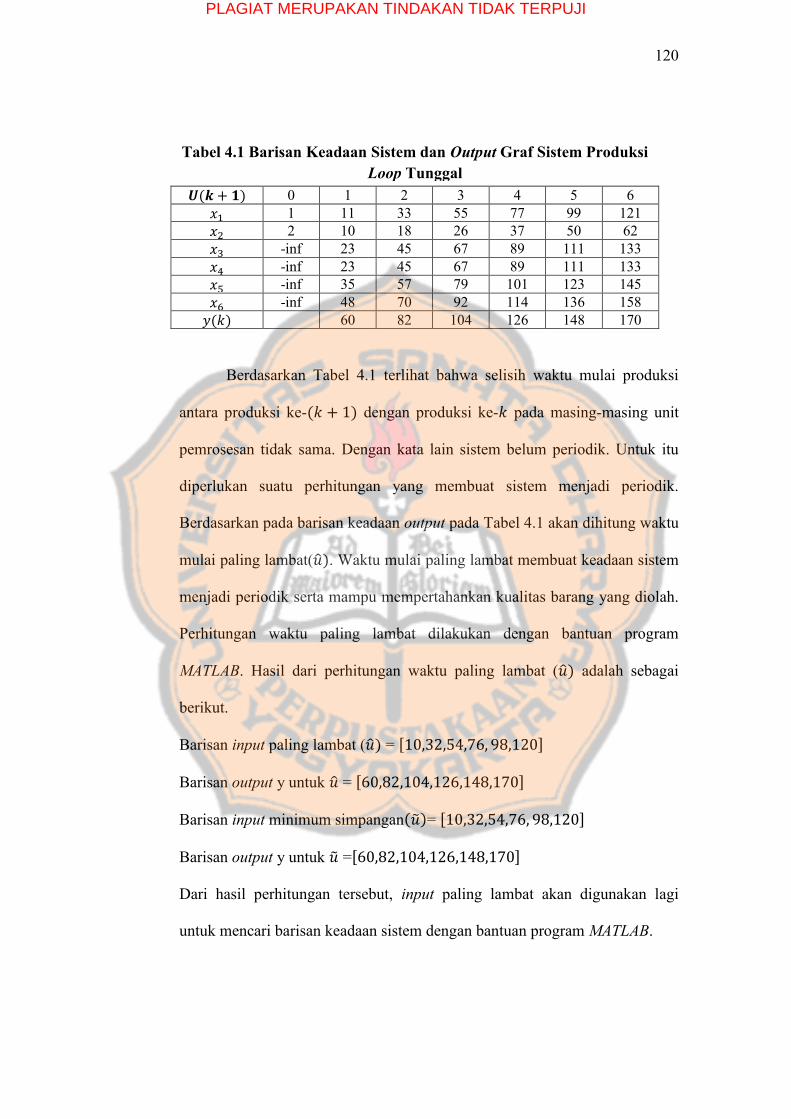
120
0 1 2 3 4 5 6
1 11 33 55 77 99 121
2 10 18 26 37 50 62
-inf 23 45 67 89 111 133
-inf 23 45 67 89 111 133
-inf 35 57 79 101 123 145
-inf 48 70 92 114 136 158
60 82 104 126 148 170
Berdasarkan Tabel 4.1 terlihat bahwa selisih waktu mulai produksi
antara produksi ke- dengan produksi ke- pada masing-masing unit
pemrosesan tidak sama. Dengan kata lain sistem belum periodik. Untuk itu
diperlukan suatu perhitungan yang membuat sistem menjadi periodik.
Berdasarkan pada barisan keadaan output pada Tabel 4.1 akan dihitung waktu
mulai paling lambat( . Waktu mulai paling lambat membuat keadaan sistem
menjadi periodik serta mampu mempertahankan kualitas barang yang diolah.
Perhitungan waktu paling lambat dilakukan dengan bantuan program
MATLAB. Hasil dari perhitungan waktu paling lambat ( adalah sebagai
berikut.
Barisan input paling lambat ( = [
Barisan output y untuk = [
Barisan input minimum simpangan = [
Barisan output y untuk =[
Dari hasil perhitungan tersebut, input paling lambat akan digunakan lagi
untuk mencari barisan keadaan sistem dengan bantuan program MATLAB.
Tabel 4.1 Barisan Keadaan Sistem dan Output Graf Sistem Produksi
Loop Tunggal
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

121
Hasil dari perhitungan barisan keadaan sistem dengan input paling lambat
adalah sebagai berikut.
0 1 2 3 4 5 6
1 11 33 55 77 99 121
2 12 34 56 78 100 122
-inf 23 45 67 89 111 133
-inf 23 45 67 89 111 133
-inf 35 57 79 101 123 145
-inf 48 70 92 114 136 158
60 82 104 126 148 170
Pada Tabel 4.2 terlihat bahwa barisan keadaan sistem dan output telah
periodik pada saat mulai produksi ke-1. Keperiodikan barisan keadaan sistem
dan output tercermin dari kesamaan selisih waktu mulai produksi ke-
dengan waktu mulai produksi ke- pada setiap unit pemrosesan. Selisih
waktu mulai produksi untuk setiap unit pemrosesan pada Gambar 3.2 adalah
22 satuan waktu.
Dengan menggunakan cara yang sama dihitung pula barisan keadaan
sistem dan output pada Gambar 3.4 dan 3.6. Hasil akhir barisan keadaan
sistem dan output pada Gambar 3.4 dengan barisan input paling lambat
( [ adalah sebagai berikut.
0 1 2 3 4 5
0 10 44 78 112 146
1 11 45 79 113 147
-Inf 16 50 84 118 152
-Inf 28 62 96 130 164
-Inf 28 62 96 130 164
-Inf 43 77 111 145 179
-Inf 40 74 108 142 176
Tabel 4.2 Barisan Keadaan Sistem dan Output pada Graf Loop
Tunggal dengan Input Paling Lambat
Tabel 4.3 Barisan Keadaan Sistem dan Ouput pada Graf Multi
Loop dengan Input Paling Lambat
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

122
-Inf 57 91 125 159 193
67 101 135 169 203
Tabel 4.3 menunjukkan bahwa barisan keadaan sistem mulai periodik
setelah produksi ke-1. Barisan keadaan sistem dan output pada Gambar 3.4
periodik dengan periode 34 satuan waktu. Selanjutnya dengan menggunakan
cara yang sama ditentukan barisan keadaan sistem dan ouput pada Gambar
3.6 dengan input paling lambat. Barisan keadaan sistem dan output pada
Gambar 3.6 dengan menggunakan input paling lambat
( [ adalah sebagai berikut.
0 1 2 3 4 5
10 944 5109 9274 13439 17604
5 939 5104 9269 13434 17599
10 944 5109 9274 13439 17604
-inf 1379 5544 9709 13874 18039
-inf 1878 6043 10208 14373 18538
-inf 1878 6043 10208 14373 18538
-inf 1379 5544 9709 13874 18039
-inf 2186 6351 10516 14681 18846
-inf 1819 5984 10149 14314 18479
-inf 2199 6364 10529 14694 18859
-inf 2566 6731 10896 15061 19226
-inf 2836 7001 11166 15331 19496
-inf 3096 7261 11426 15591 19756
-inf 3349 7514 11679 15844 20009
-inf 3627 7792 11957 16122 20287
-inf 3880 8045 12210 16375 20540
-inf 4147 8312 12477 16642 20807
-inf 4427 8592 12757 16922 21087
-inf 4705 8870 13035 17200 21365
Tabel 4.4 Barisan Keadaan Sistem dan Ouput pada Graf Multi Loop Multi
Vertex dengan Input Paling Lambat
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

123
-inf 4985 9150 13315 17480 21645
-inf 5277 9442 13607 17772 21937
-inf 5561 9726 13891 18056 22221
-inf 5859 10024 14189 18354 22519
-inf 6158 10323 14488 18653 22818
-inf 6519 10684 14849 19014 23179
-inf 6813 10978 15143 19308 23473
-inf 9186 13351 17516 21681 25846
10034 14199 18364 22529 26694
Pada Tabel 4.4 terlihat bahwa barisan keadaan sistem dan output telah
periodik pada saat mulai produksi ke-1. Keperiodikan barisan keadaan sistem
dan output tercermin dari kesamaan selisih waktu mulai produksi ke-
dengan waktu mulai produksi ke- pada setiap unit pemrosesan. Selisih
waktu mulai produksi untuk setiap unit pemrosesan pada Gambar 3.6 adalah
4165 satuan waktu.
Berikut ini akan dianalisis keterhubungan antara entry dan nilai eigen
matriks A pada sistem persamaan linear aljabar max-plus terhadap waktu
input paling lambat dan keperiodikan barisan keadaan sistem dan output
sistem produksi berdasarkan pada contoh-contoh yang telah dipaparkan
sebelumnya.
Pengamatan yang pertama dilakukan pada barisan keadaan sistem
pada sistem produksi loop tunggal. Barisan keadaan sistem pada graf sistem
produksi loop tunggal dengan persamaan
,
dengan matriks dan yang didefinisikan sebagai berikut.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

124
[
]
,
[ ]
,
[
dan memiliki nilai eigen yang bersesuaian dengan matriks = 22
,menunjukkan keperiodikannya pada produksi pertama untuk waktu input
paling lambat [ dengan periode 22 satuan waktu.
Waktu input paling lambat pada produksi pertama untuk graf loop tunggal
mempunyai nilai yang sama dengan entry matriks A yang terletak pada baris
pertama dan kolom pertama yaitu 10 yang juga merupakan nilai maksimum
waktu pemrosesan untuk unit-unit pemrosesan yang dapat memulai pekerjaan
tanpa menunggu unit pemrosesan yang lain. Dalam kasus ini dan .
Selain itu, periode barisan keadaan sistem dan ouput memiliki nilai yang
sama dengan nilai eigen matriks A. Hal yang sama juga berlaku pada periode
waktu input paling lambat yaitu 22 satuan waktu yang merupakan nilai eigen
dari matriks A.
Pengamatan selanjutnya dilakukan pada barisan keadaan sistem pada
sistem produksi loop ganda (Multi loop). Barisan keadaan sistem pada graf
sistem produksi multi loop dengan persamaan
,
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

125
dengan matriks dan yang didefinisikan sebagai berikut.
[
]
,
[ ]
,
[
dan memiliki nilai eigen yang bersesuaian dengan matriks = 34,
menunjukkan keperiodikannya pada produksi pertama untuk waktu input
paling lambat [ dengan periode 34 satuan waktu.
Waktu input paling lambat pada produksi pertama untuk graf sistem produksi
multi loop mempunyai nilai yang sama dengan entry matriks yang terletak
pada baris kedua dan kolom kedua yaitu 10 yang merupakan nilai maksimum
waktu pemrosesan pada unit pemrosesan yang dapat memulai produksi secara
langsung tanpa harus bergantung pada unit pemrosesan lainnya. Selain itu,
periode barisan keadaan sistem dan ouput memiliki nilai yang sama dengan
nilai eigen matriks . Hal yang sama juga berlaku pada periode waktu input
paling lambat yaitu 34 satuan waktu yang merupakan nilai eigen dari matriks
.
Pengamatan yang dilakukan pada barisan keadaan sistem pada sistem
produksi ber-loop ganda dengan beberapa titik (Multi loop multi vertex).
Barisan keadaan sistem pada graf multi loop multi vertex dengan persamaan
,
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

126
dengan matriks dan yang didefinisikan pada Tabel 3.7, Tabel 3.8, dan
Tabel 3,9 dan memiliki nilai eigen yang bersesuaian dengan matriks =
4165, menunjukkan keperiodikannya pada produksi pertama untuk waktu
input paling lambat [ dengan periode
4165 satuan waktu. Waktu input paling lambat pada produksi pertama untuk
graf multi loop multi vertex mempunyai nilai yang sama dengan entry matriks
yang terletak pada baris pertama dan kolom pertama yaitu 934 yang
merupakan nilai maksimum waktu pemrosesan pada unit pemrosesan yang
dapat memulai produksi secara langsung tanpa harus bergantung pada unit
pemrosesan lainnya. Selain itu, periode barisan keadaan sistem dan ouput
memiliki nilai yang sama dengan nilai eigen matriks . Hal yang sama juga
berlaku pada periode waktu input paling lambat yaitu 4165 satuan waktu yang
merupakan nilai eigen dari matriks .
Berdasarkan pada pengamatan di atas dapat disimpulkan suatu teorema
berikut.
Teorema 4.1
Jika terdapat suatu persamaan
,
dengan matriks [
], merupakan nilai eigen
maksimum dari matriks , dan input bersesuaian dengan matriks ,
serta diketahui hingga merupakan unit pemrosesan yang memulai
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

127
pemrosesan tanpa bergantung pada pemrosesan lainnya maka barisan input
paling lambat agar barisan keadaan sistem periodik adalah [
dengan .
Bukti :
Misal diberikan nilai , maka .
merupakan unit pemrosesan yang bekerja secara langsung tanpa
bergantung pada unit pemrosesan lainnya, sehingga waktu pemrosesan untuk
tiap-tiap unit pemrosesannya sama dengan . merupakan nilai
eigen maksimum dari matriks , sehingga merupakan waktu terlama yang
dimiliki suatu unit pemrosesan dalam sistem produksi untuk menyelesaikan
pekerjaannya dalam satu periode.
Selanjutnya akan diambil input paling lambat untuk produksi pertama.
Karena merupakan unit pemrosesan yang bekerja secara
langsung maka unit-unit pemrosesan tersebut bergantung pada waktu input
yang diberikan. Semakin cepat waktu inputnya, semakin cepat pula unit
pemrosesan tersebut memulai pekerjaannya, begitupun sebaliknya. Dalam
kasus ini akan dicari input yang paling lambat yang memenuhi . Jika
maka ada yang memenuhi Jadi,
bukan input paling lambat. Jika maka waktu produksi yang diambil
menjadi tidak optimum karena semua unit pemrosesan dari hingga
seharusnya telah dapat menyelesaikan proses pertamanya. Hal ini membuat
barang akan keluar dari sistem melebihi dari waktu yang diharapkan.
Sehingga diambil yang membuat tetap.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

128
Jika diambil periode , maka ada unit pemrosesan yang belum
menyelesaikan pemrosesan sebelumnya saat unit pemrosesan yang lain telah
melakukan pemrosesan periode selanjutnya. Hal ini membuat keadaan tidak
periodik untuk semua sistem. Selanjutnya diambil sebagai periode yang
merupakan waktu terlama yang dimiliki suatu unit pemrosesan dalam sistem
produksi untuk menyelesaikan pekerjaannya dalam satu periode.
Pengambilan sebagai periode membuat semua unit pemrosesan telah selesai
melakukan pemrosesan dan siap melakukan pemrosesan selanjutnya. Begitu
pun untuk unit pemrosesan dengan waktu pemrosesan sebesar , unit
pemrosesan tersebut akan segera melakukan pemrosesan selanjutnya tanpa
harus menunggu terlalu lama.
Jika diambil periode , maka akan terjadi waktu tunggu pada unit
pemrosesan dengan waktu proses terpanjang sehingga waktu pemrosesan
menjadi tidak optimum.
Sehingga, periode yang diambil untuk membuat barisan keadaan
sistem menjadi periodik adalah . Seperti dijelaskan diatas, bahwa unit
pemrosesan yang bekerja secara langsung dapat memulai produksi sesuai
dengan barisan input yang dimasukkan. Sehingga, agar barisan keadaan
sistem optimum dan periodik, barisan input yang dipilih adalah [
dengan .
Dengan barisan input paling lambat tersebut akan diperoleh barisan
keadaan sistem dan ouput yang periodik dengan periode sebesar . Pada
sistem tersebut, menjadi periode dari barisan keadaan sistem dan output
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

129
dikarenakan yang berupa nilai eigen maksimum dari matriks merupakan
waktu proses terlama suatu unit pemrosesan dapat menyelesaikan
pekerjaannya.
B. Penjadwalan Produksi Secara Periodik
Berdasarkan hasil pada bagian A, akan dibuat penjadwalan secara
periodik. Penjadwalan akan dilakukan pada graf multi loop multi vertex yang
merepresentasikan proses produksi kue secara nyata. Penjadwalan yang dapat
dilakukan adalah sebagai berikut.
Proses Kegiatan
Produksi
Waktu memulai produksi (WIB)
Produksi Ke-
1 2 3 4 5
Pencampuran adonan
tepung terigu, air, dan
butter pada 1
07.00.05 08.09.30 09.18.55 10.28.20 11.37.45
Pemisahan kuning telur
dan putih telur tahap 1 07.00.00 08.09.25 09.18.50 10.28.15 11.37.40
Pencampuran adonan
tepung terigu, air, dan
butter pada 2
07.00.05 08.09.30 09.18.55 10.28.20 11.37.45
Pemisahan kuning telur
dan putih telur tahap 2 07.07.20 08.16.45 09.26.10 10.35.35 11.45.00
Pencampuran adonan 1
dengan kuning telur
tahap 1
07.15.39 08.25.04 09.34.29 10.43.54 11.53.19
Pencampuran adonan 2
dengan kuning telur
tahap 2
07.15.39 08.25.04 09.34.29 10.43.54 11.53.19
Pencampuran putih telur
dengan gula pasir tahap
1
07.07.20 08.16.45 09.26.10 10.35.35 11.45.00
Pencampuran adonan 1
dengan campuran putih
telur 1
07.20.47 08.30.12 09.39.37 10.49.02 11.58.27
Pencampuran putih telur
dengan gula pasir tahap 07.14.40 08.24.05 09.33.30 10.42.55 11.52.20
Tabel 4.5 Jadwal Produksi Kue Secara Periodik
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

130
2
Pencampuran adonan 2
dengan campuran putih
telur 2
07.21.00 08.30.25 09.39.50 10.49.15 11.58.40
Pemanggangan lapisan
pertama pada oven 07.27.07 08.36.32 09.45.57 10.55.22 12.04.47
Pemanggangan lapisan
kedua pada oven 07.31.37 08.41.02 09.50.27 10.59.52 12.09.17
Pemanggangan lapisan
ketiga pada oven 07.35.57 08.45.22 09.54.47 11.04.12 12.13.37
Pemanggangan lapisan
keempat pada oven 07.40.10 08.49.35 09.59.00 11.08.25 12.17.50
Pemanggangan lapisan
kelima pada oven 07.44.48 08.54.13 10.03.38 11.13.03 12.22.28
Pemanggangan lapisan
keenam pada oven 07.49.01 08.58.26 10.07.51 11.17.16 12.26.41
Pemanggangan lapisan
ketujuh pada oven 07.53.28 09.02.53 10.12.18 11.21.43 12.31.08
Pemanggangan lapisan
kedelapan pada oven 07.58.08 09.07.33 10.16.58 11.26.23 12.35.48
Pemanggangan lapisan
kesembilan pada oven 08.02.46 09.12.11 10.21.36 11.31.01 12.40.26
Pemanggangan lapisan
kesepuluh pada oven 08.07.26 09.16.51 10.26.16 11.35.41 12.45.06
Pemanggangan lapisan
kesebelas pada oven 08.12.18 09.21.43 10.31.08 11.40.33 12.49.58
Pemanggangan lapisan
kedua belas pada oven 08.17.02 09.26.27 10.35.52 11.45.17 12.54.42
Pemanggangan lapisan
ketiga belas pada oven 08.22.00 09.31.25 10.40.50 11.50.15 12.59.40
Pemanggangan lapisan
keempat belas pada
oven
08.26.59 09.36.24 10.45.49 11.55.14 13.04.39
Pemanggangan lapisan
kelima belas pada oven 08.33.00 09.42.25 10.51.50 12.01.15 13.10.40
Pendinginan 08.37.54 09.47.19 10.56.44 12.06.09 13.15.34
Pengepakan 09.17.27 10.26.52 11.36.17 12.45.42 13.55.07
Barang jadi siap
didistribusikan 09.31.35 10.41.00 11.50.25 12.59.50 14.09.15
Penjadwalan yang dilakukan pada Tabel 4.5 disusun berdasarkan
barisan keadaan sistem dan output dengan menggunakan input paling lambat.
Penjadwalan dilakukan dengan menggunakan detik sebagai satuan waktu dan
pukul 07.00.00 sebagai waktu memulai produksi. Proses kegiatan produksi
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

131
yang dituliskan sesuai dengan proses kegiatan produksi sebenarnya. Dengan
menjadwalkan secara periodik dan menggunakan input paling lambat,
produsen dapat melakukan pekerjaan dengan lebih terjadwal dan kualitas
barang setengah jadi menjadi lebih terjaga karena meminimalkan waktu
tunggu antar unit pemrosesan. Proses menunggu terjadi pada tahap awal
produksi pada saat barang mentah belum mulai diproses.
C. Keterbatasan Penelitian
Keterbatasan yang dialami penulis dalam pelaksanaan penelitian
adalah proses produksi yang dilakukan secara manual untuk beberapa unit
pemrosesan. Proses produksi secara manual menyebabkan perhitungan waktu
transfer menjadi kurang akurat. Perhitungan waktu transfer dilakukan dengan
menghitung waktu rata-rata untuk setiap proses transfer. Perhitungan waktu
transfer yang kurang akurat akan mempengaruhi waktu produksi.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

132
BAB V
KESIMPULAN DAN SARAN
A. KESIMPULAN
Berdasarkan pada pembahasan-pembahasan sebelumnya dapat
diambil kesimpulan sebagai berikut.
1. Sifat-sifat model matematika waktu produksi pada graf sistem
produksi ber-loop dengan menggunakan sistem persamaan linear
aljabar max-plus adalah sebagai berikut.
a. Jika suatu graf ber-loop memiliki unit pemrosesan dan memiliki
total loop sebanyak , maka banyaknya unit pemrosesan
modifikasi yang terjadi sebanyak .
b. Jika menunjukkan suatu unit pemrosesan dengan loop sebanyak
dan menunjukkan unit pemrosesan bayangan ke- maka
pada matriks sama dengan , dengan
menunjukkan waktu pemrosesan pada unit pemrosesan dan
menunjukkan total waktu transfer dari hingga .
2. Jika terdapat suatu persamaan
,
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

133
dengan matriks [
], merupakan nilai
eigen maksimum dari matriks , dan input bersesuaian
dengan matriks , serta diketahui hingga merupakan unit
pemrosesan yang memulai pemrosesan tanpa bergantung pada
pemrosesan lainnya maka barisan input paling lambat agar barisan
keadaan sistem periodik adalah [
dengan .
B. SARAN
Adapun saran-saran yang dapat penulis berikan bagi penelitian
selanjutnya adalah sebagai berikut.
1. Sistem produksi yang dibahas dalam penelitian ini dibatasi pada
sistem produksi pada graf ber-loop dengan satu input satu output.
Penelitian selanjutnya dapat membahas tentang sistem produksi pada
graf ber-loop dengan multi input multi output.
2. Penelitian ini dilakukan dengan menggunakan proses produksi kue
secara manual pada beberapa unit pemrosesan sebagai contoh nyata.
Hal ini menyebabkan perhitungan waktu transfer menjadi kurang
akurat. Penelitian selanjutnya dapat menggunakan contoh pada suatu
produksi dengan semua unit pemrosesan berupa mesin.
3. Pemodelan graf sistem produksi ber-loop pada penelitian ini dibuat
dengan memodifikasi graf melalui penambahan unit pemrosesan.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

134
Penelitian selanjutnya dapat membuat pemodelan tanpa menambahkan
unit pemrosesan bayangan.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

135
DAFTAR PUSTAKA
Arifin, Mustofa dan Mustofa. 2012. Aplikasi Sistem Persamaan Linear Aljabar
Max-Plus dalam Mengoptimalisasi Waktu Produksi Bakpia Pathok Jaya
“25” Daerah Istimewa Yogyakarta. Skripsi diajukan kepada Fakultas
Matematika dan Ilmu Pengetahuan Alam Universitas Negeri Yogyakarta.
Berlianty, Arifin. (2002). Teknik-Teknik Optimasi Heuristik. ISBN : 987-979-756-
625-8.
De Schutter, B. 1996. Max-Algebraic System Theory for Discrete Event Systems.
PhD Thesis. Leuven: Department of Electrical Engineering, Katholieke
Universiteit.
De Schutter, B and T. Van den Boom. 2008. Max-plus algebra and max-plus
linear discrete event system : An Introduction, “Proceedings of the 9th
International Workshop on Discrete Event System”. Goteborg, Sweden.
Farlow, Kasie G. (2009). Max-Plus Algebra. Thesis submitted to the Faculty of
the Virginia Polytechnic Institute and State University.
Rudhito, Andy. 2016. Aljabar Max-Plus dan Penerapannya. Yogyakarta :
Program Studi Pendidikan Matematika, FKIP-Universitas Sanata Dharma,
Yogyakarta.
Subiono and Nur Shofianah. 2009. Using Max-Plus Algebra in The Flow Shop
Scheduling. The Journal of Technology and Science, Vol. 20, No. 3.
Subiono. 2015. Aljabar Min-Max Plus dan Terapannya. Surabaya : Jurusan
Matematika, FMIPA-ITS, Surabaya.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

136
LAMPIRAN
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

137
LAMPIRAN
1. Hasil Perhitungan MATLAB untuk Contoh 1
2. Hasil Perhitungan MATLAB untuk Contoh 2
3. Hasil Perhitungan MATLAB untuk Contoh 3
4. Foto Penelitian
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

138
LAMPIRAN I
1. Nilai Eigen dan Vektor Eigen Max-Plus Matriks Pada Contoh 1
Matriks yang dihitung A = [10 -inf 10 -inf -inf -inf;-inf 8 -inf -inf -inf -inf;22 -inf 22 -inf -inf -inf;22 19 22 15 -inf -inf;34 31 34 -inf 10 -inf;47 44
47 30 23 12]
HASIL PERHITUNGAN :
===================
Matriks A =
10 -Inf 10 -Inf -Inf -Inf
-Inf 8 -Inf -Inf -Inf -Inf
22 -Inf 22 -Inf -Inf -Inf
22 19 22 15 -Inf -Inf
34 31 34 -Inf 10 -Inf
47 44 47 30 23 12
Matriks A TIDAK IRREDUSIBEL
NILAI EIGEN max-plus maksimum matriks A = 22
VEKTOR EIGEN max-plus yang bersesuaian =
-12
-Inf
0
0
12
25
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

139
2. Perhitungan Barisan Keadaan Sistem dan Output pada Contoh 1
INPUT-OUTPUT SLMI(A, B, C, x0)
Masukkan matriks A(nxn) = [10 -inf 10 -inf -inf -inf;-inf 8 -inf -inf -inf -inf;22 -inf 22 -inf -inf -inf;22 19 22 15 -inf -inf;34 31 34 -inf 10 -inf;47
44 47 30 23 12]
Masukkan matriks B(nx1) = [1;2;13;13;25;38]
Masukkan matriks C(1xn) = [-inf -inf -inf -inf -inf 12]
Masukkan kondisi awal x0(nx1) = [1;2;-inf;-inf;-inf;-inf]
Masukkan barisan input sp kej ke-k u(kx1) = [0;13;20;35;48;60]
HASIL PERHITUNGAN :
===================
Matriks A =
10 -Inf 10 -Inf -Inf -Inf
-Inf 8 -Inf -Inf -Inf -Inf
22 -Inf 22 -Inf -Inf -Inf
22 19 22 15 -Inf -Inf
34 31 34 -Inf 10 -Inf
47 44 47 30 23 12
Matriks B =
1
2
13
13
25
38
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
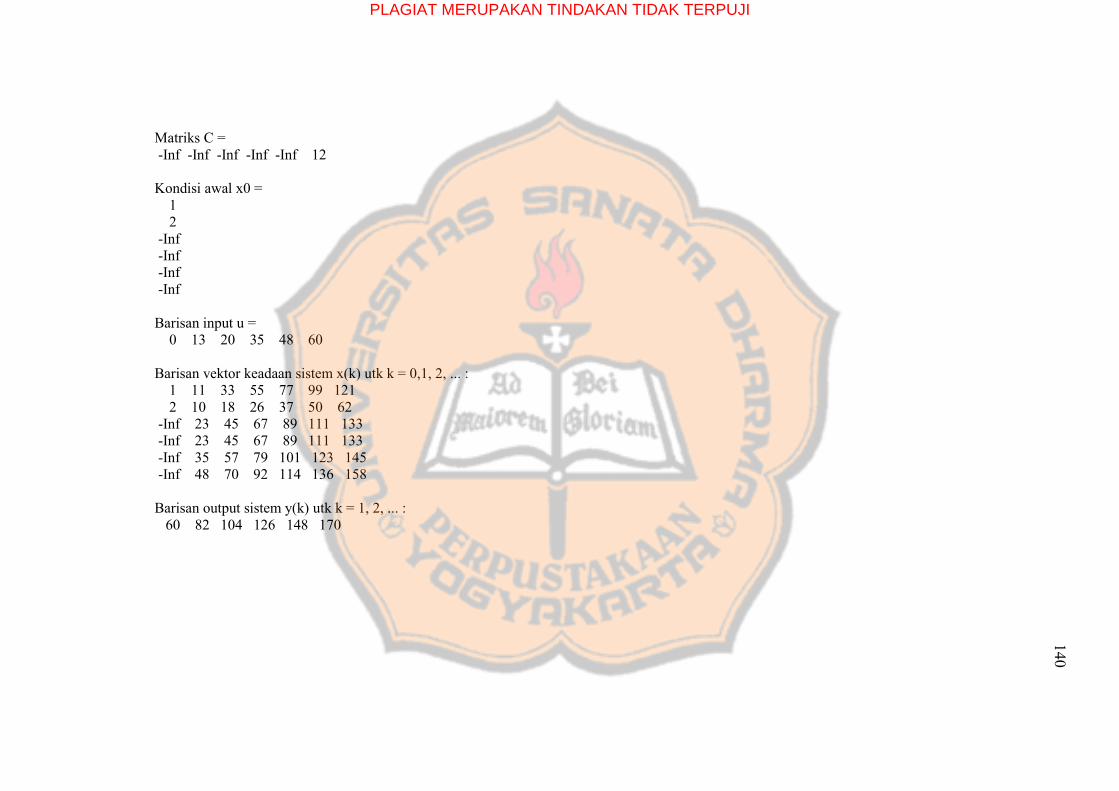
140
Matriks C =
-Inf -Inf -Inf -Inf -Inf 12
Kondisi awal x0 =
1
2
-Inf
-Inf
-Inf
-Inf
Barisan input u =
0 13 20 35 48 60
Barisan vektor keadaan sistem x(k) utk k = 0,1, 2, ... :
1 11 33 55 77 99 121
2 10 18 26 37 50 62
-Inf 23 45 67 89 111 133
-Inf 23 45 67 89 111 133
-Inf 35 57 79 101 123 145
-Inf 48 70 92 114 136 158
Barisan output sistem y(k) utk k = 1, 2, ... :
60 82 104 126 148 170
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

141
OPTIMISASI INPUT-OUTPUT Sistem Linear Max-Plus Waktu-Invariant
----------------------------------------------------
Masukkan matriks A = [10 -inf 10 -inf -inf -inf;-inf 8 -inf -inf -inf -inf;22 -inf 22 -inf -inf -inf;22 19 22 15 -inf -inf;34 31 34 -inf 10 -inf;47 44 47
30 23 12]
Masukkan matriks B = [1;2;13;13;25;38]
Masukkan matriks C = [-inf -inf -inf -inf -inf 12]
Masukkan kondisi awal x0 = [1;2;-inf;-inf;-inf;-inf]
Masukkan barisan output (dalam vektor kolom) y = [60;82;104;126;148;170]
HASIL PERHITUNGAN :
===================
Matriks A =
10 -Inf 10 -Inf -Inf -Inf
-Inf 8 -Inf -Inf -Inf -Inf
22 -Inf 22 -Inf -Inf -Inf
22 19 22 15 -Inf -Inf
34 31 34 -Inf 10 -Inf
47 44 47 30 23 12
Matriks B =
1
2
13
13
25
38
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

142
Matriks C =
-Inf -Inf -Inf -Inf -Inf 12
Kondisi awal x0 =
1
2
-Inf
-Inf
-Inf
-Inf
Barisan output y =
60
82
104
126
148
170
Barisan input paling lambat u_topi =
10 32 54 76 98 120
Barisan output y untuk u_topi =
60 82 104 126 148 170
Barisan input minimum simpangan u_tilde =
10 32 54 76 98 120
Barisan output y untuk u_tilde =
60 82 104 126 148 170
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

143
>> hitung
ans =
function io_SLMI = maxio
INPUT-OUTPUT SLMI(A, B, C, x0)
--------------------------------
Masukkan matriks A(nxn) = [10 -inf 10 -inf -inf -inf;-inf 8 -inf -inf -inf -inf;22 -inf 22 -inf -inf -inf;22 19 22 15 -inf -inf;34 31 34 -inf 10 -inf;47
44 47 30 23 12]
Masukkan matriks B(nx1) = [1;2;13;13;25;38]
Masukkan matriks C(1xn) = [-inf -inf -inf -inf -inf 12]
Masukkan kondisi awal x0(nx1) = [1;2;-inf;-inf;-inf;-inf]
Masukkan barisan input sp kej ke-k u(kx1) = [10;32;54;76;98;120]
HASIL PERHITUNGAN :
===================
Matriks A =
10 -Inf 10 -Inf -Inf -Inf
-Inf 8 -Inf -Inf -Inf -Inf
22 -Inf 22 -Inf -Inf -Inf
22 19 22 15 -Inf -Inf
34 31 34 -Inf 10 -Inf
47 44 47 30 23 12
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

144
Matriks B =
1
2
13
13
25
38
Matriks C = -Inf -Inf -Inf -Inf -Inf 12
Kondisi awal x0 =
1
2
-Inf
-Inf
-Inf
-Inf
Barisan input u =
10 32 54 76 98 120
Barisan vektor keadaan sistem x(k) utk k = 0,1, 2, ... :
1 11 33 55 77 99 121
2 12 34 56 78 100 122
-Inf 23 45 67 89 111 133
-Inf 23 45 67 89 111 133
-Inf 35 57 79 101 123 145
-Inf 48 70 92 114 136 158
Barisan output sistem y(k) utk k = 1, 2, ... :
60 82 104 126 148 170
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

145
LAMPIRAN II
1. Nilai Eigen dan Vektor Eigen Max-Plus Matriks Pada Contoh 2
Matriks yang dihitung A = [5 -inf -inf -inf -inf -inf -inf -inf;-inf 10 -inf -inf -inf -inf -inf -inf;11
-inf 10 -inf -inf -inf 10 -inf;23 22 22 8 -inf -inf 22 -inf;23 -inf 22 -inf
10 -inf 22 -inf;38 33 37 19 25 12 37 -inf;35 -inf 34 -inf 22 -inf 34
-inf;52 47 51 33 39 26 51 10]
HASIL PERHITUNGAN :
===================
Matriks A =
5 -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf 10 -Inf -Inf -Inf -Inf -Inf -Inf
11 -Inf 10 -Inf -Inf -Inf 10 -Inf
23 22 22 8 -Inf -Inf 22 -Inf
23 -Inf 22 -Inf 10 -Inf 22 -Inf
38 33 37 19 25 12 37 -Inf
35 -Inf 34 -Inf 22 -Inf 34 -Inf
52 47 51 33 39 26 51 10
Matriks A TIDAK IRREDUSIBEL
NILAI EIGEN max-plus maksimum matriks A = 34
VEKTOR EIGEN max-plus yang bersesuaian =
-Inf
-Inf
-24
-12
-12
3
0
17
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

146
2. Perhitungan Barisan Keadaan Sistem dan Output pada Contoh 2
INPUT-OUTPUT SLMI(A, B, C, x0)
--------------------------------
Masukkan matriks A(nxn) = [5 -inf -inf -inf -inf -inf -inf -inf;-inf 10 -inf -inf -inf -inf -inf
-inf;11 -inf 10 -inf -inf -inf 10 -inf;23 22 22 8 -inf -inf 22 -inf;23 -inf 22
-inf 10 -inf 22 -inf;38 33 37 19 25 12 37 -inf;35 -inf 34 -inf 22 -inf
34 -inf;52 47 51 33 39 26 51 10]
Masukkan matriks B(nx1) = [0;1;6;18;18;33;30;47]
Masukkan matriks C(1xn) = [-inf -inf -inf -inf -inf -inf -inf 10]
Masukkan kondisi awal x0(nx1) = [0;1;-inf;-inf;-inf;-inf;-inf;-inf]
Masukkan barisan input sp kej ke-k u(kx1) = [10;20;30;40;50]
HASIL PERHITUNGAN :
===================
Matriks A =
5 -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf 10 -Inf -Inf -Inf -Inf -Inf -Inf
11 -Inf 10 -Inf -Inf -Inf 10 -Inf
23 22 22 8 -Inf -Inf 22 -Inf
23 -Inf 22 -Inf 10 -Inf 22 -Inf
38 33 37 19 25 12 37 -Inf
35 -Inf 34 -Inf 22 -Inf 34 -Inf
52 47 51 33 39 26 51 10
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

147
Matriks B =
0
1
6
18
18
33
30
47
Matriks C = -Inf -Inf -Inf -Inf -Inf -Inf -Inf 10
Kondisi awal x0 =
0
1
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
Barisan input u = 10 20 30 40 50
Barisan vektor keadaan sistem x(k) utk k = 0,1, 2, ... :
0 10 20 30 40 50
1 11 21 31 41 51
-Inf 16 50 84 118 152
-Inf 28 62 96 130 164
-Inf 28 62 96 130 164
-Inf 43 77 111 145 179
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

148
-Inf 40 74 108 142 176
-Inf 57 91 125 159 193
Barisan output sistem y(k) utk k = 1, 2, ... :
67 101 135 169 203
OPTIMISASI INPUT-OUTPUT Sistem Linear Max-Plus Waktu-Invariant
----------------------------------------------------
Masukkan matriks A = [5 -inf -inf -inf -inf -inf -inf -inf;
-inf 10 -inf -inf -inf -inf -inf -inf;
11 -inf 10 -inf -inf -inf 10 -inf;
23 22 22 8 -inf -inf 22 -inf;
23 -inf 22 -inf 10 -inf 22 -inf;
38 33 37 19 25 12 37 -inf;
35 -inf 34 -inf 22 -inf 34 -inf;
52 47 51 33 39 26 51 10]
Masukkan matriks B = [0;1;6;18;18;33;30;47]
Masukkan matriks C = [-inf -inf -inf -inf -inf -inf -inf 10]
Masukkan kondisi awal x0 = [0;1;-inf;-inf;-inf;-inf;-inf;-inf]
Masukkan barisan output (dalam vektor kolom) y = [67;101;135;169;203]
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

149
HASIL PERHITUNGAN :
===================
Matriks A =
5 -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf 10 -Inf -Inf -Inf -Inf -Inf -Inf
11 -Inf 10 -Inf -Inf -Inf 10 -Inf
23 22 22 8 -Inf -Inf 22 -Inf
23 -Inf 22 -Inf 10 -Inf 22 -Inf
38 33 37 19 25 12 37 -Inf
35 -Inf 34 -Inf 22 -Inf 34 -Inf
52 47 51 33 39 26 51 10
Matriks B =
0
1
6
18
18
33
30
47
Matriks C =
-Inf -Inf -Inf -Inf -Inf -Inf -Inf 10
Kondisi awal x0 =
0
1
-Inf
-Inf
-Inf
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

150
-Inf
-Inf
-Inf
Barisan output y =
67
101
135
169
203
Barisan input paling lambat u_topi =
10 44 78 112 146
Barisan output y untuk u_topi =
67 101 135 169 203
Barisan input minimum simpangan u_tilde =
10 44 78 112 146
Barisan output y untuk u_tilde =
67 101 135 169 203
>>
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

151
INPUT-OUTPUT SLMI(A, B, C, x0)
--------------------------------
Masukkan matriks A(nxn) = [5 -inf -inf -inf -inf -inf -inf -inf;
-inf 10 -inf -inf -inf -inf -inf -inf;
11 -inf 10 -inf -inf -inf 10 -inf;
23 22 22 8 -inf -inf 22 -inf;
23 -inf 22 -inf 10 -inf 22 -inf;
38 33 37 19 25 12 37 -inf;
35 -inf 34 -inf 22 -inf 34 -inf;
52 47 51 33 39 26 51 10]
Masukkan matriks B(nx1) = [0;1;6;18;18;33;30;47]
Masukkan matriks C(1xn) = [-inf -inf -inf -inf -inf -inf -inf 10]
Masukkan kondisi awal x0(nx1) = [0;1;-inf;-inf;-inf;-inf;-inf;-inf]
Masukkan barisan input sp kej ke-k u(kx1) = [10;44;78;112;146]
HASIL PERHITUNGAN :
===================
Matriks A =
5 -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf 10 -Inf -Inf -Inf -Inf -Inf -Inf
11 -Inf 10 -Inf -Inf -Inf 10 -Inf
23 22 22 8 -Inf -Inf 22 -Inf
23 -Inf 22 -Inf 10 -Inf 22 -Inf
38 33 37 19 25 12 37 -Inf
35 -Inf 34 -Inf 22 -Inf 34 -Inf
52 47 51 33 39 26 51 10
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

152
Matriks B =
0
1
6
18
18
33
30
47
Matriks C =
-Inf -Inf -Inf -Inf -Inf -Inf -Inf 10
Kondisi awal x0 =
0
1
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
Barisan input u =
10 44 78 112 146
Barisan vektor keadaan sistem x(k) utk k = 0,1, 2, ... :
0 10 44 78 112 146
1 11 45 79 113 147
-Inf 16 50 84 118 152
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

153
-Inf 28 62 96 130 164
-Inf 28 62 96 130 164
-Inf 43 77 111 145 179
-Inf 40 74 108 142 176
-Inf 57 91 125 159 193
Barisan output sistem y(k) utk k = 1, 2, ... :
67 101 135 169 203
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

154
LAMPIRAN III
1. Nilai Eigen dan Vektor Eigen Max-Plus Matriks Pada Contoh 3
NILAI EIGEN DAN VEKTOR EIGEN MAX-PLUS MATRIKS
----------------------------------------------
Matriks yang dihitung A = [934 -inf -inf -inf 295 -inf -inf -inf -inf -inf -inf -inf -inf -inf
-inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf;-inf 435 -inf 435 -inf
-inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf
-inf -inf -inf -inf -inf;-inf -inf 934 -inf -inf 295 -inf -inf -inf -inf -inf -inf -inf
-inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf;-inf 875 -inf 875
-inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf
-inf -inf -inf -inf -inf -inf;1868 875 -inf 875 1229 -inf -inf -inf -inf -inf -inf
-inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf;-inf 1315
1868 1315 -inf 1229 -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf
-inf -inf -inf -inf -inf -inf -inf -inf;-inf 875 -inf 875 -inf -inf 365 -inf 365 -inf
-inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf;
2176 1255 -inf 1255 1537 -inf 745 295 745 -inf -inf -inf -inf -inf -inf -inf -inf
-inf -inf -inf -inf -inf -inf -inf -inf -inf -inf;-inf 1315 -inf 1315 -inf -inf 745 -inf
745 -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf
-inf -inf;-inf 1695 2176 1695 -inf 1537 1125 -inf 1125 295 -inf -inf -inf -inf -inf -inf
-inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf;2556 1635 -inf 1635 1917 -inf
1125 675 1125 -inf 212 -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf
-inf 212 -inf -inf;2826 1905 -inf 1905 2187 -inf 1395 945 1395 -inf 482 212 -inf
-inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf 482 -inf -inf;3086 2165 -inf
2165 2447 -inf 1655 1205 1655 -inf 742 472 212 -inf -inf -inf -inf -inf -inf -inf
-inf -inf -inf -inf 742 -inf -inf;3339 2418 -inf 2418 2700 -inf 1908 1458 1908 -inf
995 725 465 212 -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf 995 -inf -inf;
3617 2696 -inf 2696 2978 -inf 2186 1736 2186 -inf 1273 1003 743 490 212 -inf -inf
-inf -inf -inf -inf -inf -inf -inf 1273 -inf -inf;3870 2949 -inf 2949 3231 -inf 2439
1989 2439 -inf 1526 1256 996 743 465 212 -inf -inf -inf -inf -inf -inf -inf -inf
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

155
1526 -inf -inf;4137 3216 2556 3216 3498 1917 2706 2256 2706 675 1793 1523 1263 1010
732 479 212 -inf -inf -inf -inf -inf -inf -inf 1793 -inf -inf;4417 3496 2836 3496
3778 2197 2986 2536 2986 955 2073 1803 1543 1290 1012 759 492 212 -inf -inf -inf
-inf -inf -inf 2073 -inf -inf;4695 3774 3114 3774 4056 2475 3264 2814 3264 1233 2351
2081 1821 1568 1290 1037 770 490 212 -inf -inf -inf -inf -inf 2351 -inf -inf;4975
4054 3394 4054 4336 2755 3544 3094 3544 1513 2631 2361 2101 1848 1570 1317 1050 770
492 212 -inf -inf -inf -inf 2631 -inf -inf;5267 4346 3686 4346 4628 3047 3836 3386
3836 1805 2923 2653 2393 2140 1862 1609 1342 1062 784 504 212 -inf -inf -inf 2923
-inf -inf;5551 4630 3970 4630 4912 3331 4120 3670 4120 2089 3207 2937 2677 2424 2146
1893 1626 1346 1068 788 496 212 -inf -inf 3207 -inf -inf;5849 4928 4268 4928 5210
3629 4418 3968 4418 2387 3505 3235 2975 2722 2444 2191 1924 1644 1366 1086 794 510
212 -inf 3505 -inf -inf;6148 5227 4567 5227 5509 3928 4717 4267 4717 2686 3804 3534
3274 3021 2743 2490 2223 1943 1665 1385 1093 809 511 212 3804 -inf -inf;6509 5588
4928 5588 5870 4289 5078 4628 5078 3047 4165 3895 3635 3382 3104 2851 2584 2304 2026
1746 1454 1170 872 573 4165 -inf -inf;6803 5882 5222 5882 6164 4583 5372 4922 5372
3341 4459 4189 3929 3676 3398 3145 2878 2598 2320 2040 1748 1464 1166 867 4459 2217
-inf;9176 8255 7595 8255 8537 6956 7745 7295 7745 5714 6832 6562 6302 6049 5771 5518
5251 4971 4693 4413 4121 3837 3539 3240 6832 4590 848]
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

156
HASIL PERHITUNGAN :
===================
Matriks A =
Columns 1 through 16
934 -Inf -Inf -Inf 295 -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf 435 -Inf 435 -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf -Inf 934 -Inf -Inf 295 -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf 875 -Inf 875 -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
1868 875 -Inf 875 1229 -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf 1315 1868 1315 -Inf 1229 -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf 875 -Inf 875 -Inf -Inf 365 -Inf 365 -Inf -Inf -Inf -Inf -Inf -Inf -Inf
2176 1255 -Inf 1255 1537 -Inf 745 295 745 -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf 1315 -Inf 1315 -Inf -Inf 745 -Inf 745 -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf 1695 2176 1695 -Inf 1537 1125 -Inf 1125 295 -Inf -Inf -Inf -Inf -Inf -Inf
2556 1635 -Inf 1635 1917 -Inf 1125 675 1125 -Inf 212 -Inf -Inf -Inf -Inf -Inf
2826 1905 -Inf 1905 2187 -Inf 1395 945 1395 -Inf 482 212 -Inf -Inf -Inf -Inf
3086 2165 -Inf 2165 2447 -Inf 1655 1205 1655 -Inf 742 472 212 -Inf -Inf -Inf
3339 2418 -Inf 2418 2700 -Inf 1908 1458 1908 -Inf 995 725 465 212 -Inf -Inf
3617 2696 -Inf 2696 2978 -Inf 2186 1736 2186 -Inf 1273 1003 743 490 212 -Inf
3870 2949 -Inf 2949 3231 -Inf 2439 1989 2439 -Inf 1526 1256 996 743 465 212
4137 3216 2556 3216 3498 1917 2706 2256 2706 675 1793 1523 1263 1010 732 479
4417 3496 2836 3496 3778 2197 2986 2536 2986 955 2073 1803 1543 1290 1012 759
4695 3774 3114 3774 4056 2475 3264 2814 3264 1233 2351 2081 1821 1568 1290 1037
4975 4054 3394 4054 4336 2755 3544 3094 3544 1513 2631 2361 2101 1848 1570 1317
5267 4346 3686 4346 4628 3047 3836 3386 3836 1805 2923 2653 2393 2140 1862 1609
5551 4630 3970 4630 4912 3331 4120 3670 4120 2089 3207 2937 2677 2424 2146 1893
5849 4928 4268 4928 5210 3629 4418 3968 4418 2387 3505 3235 2975 2722 2444 2191
6148 5227 4567 5227 5509 3928 4717 4267 4717 2686 3804 3534 3274 3021 2743 2490
6509 5588 4928 5588 5870 4289 5078 4628 5078 3047 4165 3895 3635 3382 3104 2851
6803 5882 5222 5882 6164 4583 5372 4922 5372 3341 4459 4189 3929 3676 3398 3145
9176 8255 7595 8255 8537 6956 7745 7295 7745 5714 6832 6562 6302 6049 5771 5518
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

157
Columns 17 through 27
Matriks A TIDAK IRREDUSIBEL
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf 212 -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf 482 -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf 742 -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf 995 -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf 1273 -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf 1526 -Inf -Inf
212 -Inf -Inf -Inf -Inf -Inf -Inf -Inf 1793 -Inf -Inf
492 212 -Inf -Inf -Inf -Inf -Inf -Inf 2073 -Inf -Inf
770 490 212 -Inf -Inf -Inf -Inf -Inf 2351 -Inf -Inf
1050 770 492 212 -Inf -Inf -Inf -Inf 2631 -Inf -Inf
1342 1062 784 504 212 -Inf -Inf -Inf 2923 -Inf -Inf
1626 1346 1068 788 496 212 -Inf -Inf 3207 -Inf -Inf
1924 1644 1366 1086 794 510 212 -Inf 3505 -Inf -Inf
2223 1943 1665 1385 1093 809 511 212 3804 -Inf -Inf
2584 2304 2026 1746 1454 1170 872 573 4165 -Inf -Inf
2878 2598 2320 2040 1748 1464 1166 867 4459 2217 -Inf
5251 4971 4693 4413 4121 3837 3539 3240 6832 4590 848
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

158
NILAI EIGEN max-plus maksimum matriks A =
4165
VEKTOR EIGEN max-plus yang bersesuaian =
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-3953
-3683
-3423
-3170
-2892
-2639
-2372
-2092
-1814
-1534
-1242
-958
-660
-361
0
294
2667
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

159
2. Perhitungan Barisan Keadaan Sistem dan Output pada Contoh 3
>> hitung
ans =
function io_SLMI = maxio
INPUT-OUTPUT SLMI(A, B, C, x0)
--------------------------------
Masukkan matriks A(nxn) = [934 -inf -inf -inf 295 -inf -inf -inf -inf -inf -inf -inf -inf -inf
-inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf;-inf 435 -inf 435 -inf
-inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf
-inf -inf -inf -inf -inf;-inf -inf 934 -inf -inf 295 -inf -inf -inf -inf -inf -inf -inf
-inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf;-inf 875 -inf 875
-inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf
-inf -inf -inf -inf -inf -inf;1868 875 -inf 875 1229 -inf -inf -inf -inf -inf -inf
-inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf;-inf 1315
1868 1315 -inf 1229 -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf
-inf -inf -inf -inf -inf -inf -inf -inf;-inf 875 -inf 875 -inf -inf 365 -inf 365 -inf
-inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf;
2176 1255 -inf 1255 1537 -inf 745 295 745 -inf -inf -inf -inf -inf -inf -inf -inf
-inf -inf -inf -inf -inf -inf -inf -inf -inf -inf;-inf 1315 -inf 1315 -inf -inf 745 -inf
745 -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf
-inf -inf;-inf 1695 2176 1695 -inf 1537 1125 -inf 1125 295 -inf -inf -inf -inf -inf -inf
-inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf;2556 1635 -inf 1635 1917 -inf
1125 675 1125 -inf 212 -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf
-inf 212 -inf -inf;2826 1905 -inf 1905 2187 -inf 1395 945 1395 -inf 482 212 -inf
-inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf 482 -inf -inf;3086 2165 -inf
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

160
2165 2447 -inf 1655 1205 1655 -inf 742 472 212 -inf -inf -inf -inf -inf -inf -inf
-inf -inf -inf -inf 742 -inf -inf;3339 2418 -inf 2418 2700 -inf 1908 1458 1908 -inf
995 725 465 212 -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf 995 -inf -inf;
3617 2696 -inf 2696 2978 -inf 2186 1736 2186 -inf 1273 1003 743 490 212 -inf -inf
-inf -inf -inf -inf -inf -inf -inf 1273 -inf -inf;3870 2949 -inf 2949 3231 -inf 2439
1989 2439 -inf 1526 1256 996 743 465 212 -inf -inf -inf -inf -inf -inf -inf -inf
1526 -inf -inf;4137 3216 2556 3216 3498 1917 2706 2256 2706 675 1793 1523 1263 1010
732 479 212 -inf -inf -inf -inf -inf -inf -inf 1793 -inf -inf;4417 3496 2836 3496
3778 2197 2986 2536 2986 955 2073 1803 1543 1290 1012 759 492 212 -inf -inf -inf
-inf -inf -inf 2073 -inf -inf;4695 3774 3114 3774 4056 2475 3264 2814 3264 1233 2351
2081 1821 1568 1290 1037 770 490 212 -inf -inf -inf -inf -inf 2351 -inf -inf;4975
4054 3394 4054 4336 2755 3544 3094 3544 1513 2631 2361 2101 1848 1570 1317 1050 770
492 212 -inf -inf -inf -inf 2631 -inf -inf;5267 4346 3686 4346 4628 3047 3836 3386
3836 1805 2923 2653 2393 2140 1862 1609 1342 1062 784 504 212 -inf -inf -inf 2923
-inf -inf;5551 4630 3970 4630 4912 3331 4120 3670 4120 2089 3207 2937 2677 2424 2146
1893 1626 1346 1068 788 496 212 -inf -inf 3207 -inf -inf;5849 4928 4268 4928 5210
3629 4418 3968 4418 2387 3505 3235 2975 2722 2444 2191 1924 1644 1366 1086 794 510
212 -inf 3505 -inf -inf;6148 5227 4567 5227 5509 3928 4717 4267 4717 2686 3804 3534
3274 3021 2743 2490 2223 1943 1665 1385 1093 809 511 212 3804 -inf -inf;6509 5588
4928 5588 5870 4289 5078 4628 5078 3047 4165 3895 3635 3382 3104 2851 2584 2304 2026
1746 1454 1170 872 573 4165 -inf -inf;6803 5882 5222 5882 6164 4583 5372 4922 5372
3341 4459 4189 3929 3676 3398 3145 2878 2598 2320 2040 1748 1464 1166 867 4459 2217
-inf;9176 8255 7595 8255 8537 6956 7745 7295 7745 5714 6832 6562 6302 6049 5771 5518
5251 4971 4693 4413 4121 3837 3539 3240 6832 4590 848]
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

161
Masukkan matriks B(nx1) = [10;
5;
10;
445;
944;
944;
445;
1252;
885;
1265;
1632;
1902;
2162;
2415;
2693;
2946;
3213;
3493;
3771;
4051;
4343;
4627;
4925;
5224;
5585;
5879;
8252]
Masukkan matriks C(1xn) = [-inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf
-inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf 848]
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

162
Masukkan kondisi awal x0(nx1) = [10;
5;
10;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf]
Masukkan barisan input sp kej ke-k u(kx1) = [0;600;1800;2400;3000;3600]
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
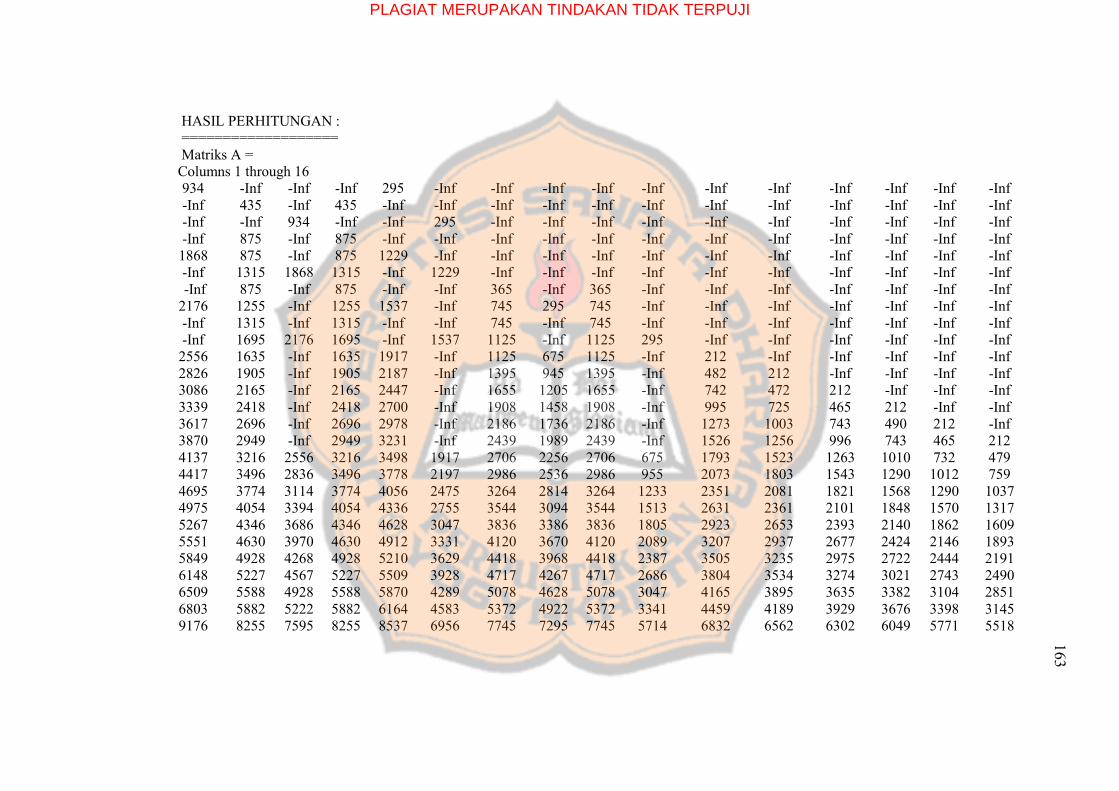
163
HASIL PERHITUNGAN :
===================
Matriks A =
Columns 1 through 16
934 -Inf -Inf -Inf 295 -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf 435 -Inf 435 -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf -Inf 934 -Inf -Inf 295 -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf 875 -Inf 875 -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
1868 875 -Inf 875 1229 -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf 1315 1868 1315 -Inf 1229 -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf 875 -Inf 875 -Inf -Inf 365 -Inf 365 -Inf -Inf -Inf -Inf -Inf -Inf -Inf
2176 1255 -Inf 1255 1537 -Inf 745 295 745 -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf 1315 -Inf 1315 -Inf -Inf 745 -Inf 745 -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf 1695 2176 1695 -Inf 1537 1125 -Inf 1125 295 -Inf -Inf -Inf -Inf -Inf -Inf
2556 1635 -Inf 1635 1917 -Inf 1125 675 1125 -Inf 212 -Inf -Inf -Inf -Inf -Inf
2826 1905 -Inf 1905 2187 -Inf 1395 945 1395 -Inf 482 212 -Inf -Inf -Inf -Inf
3086 2165 -Inf 2165 2447 -Inf 1655 1205 1655 -Inf 742 472 212 -Inf -Inf -Inf
3339 2418 -Inf 2418 2700 -Inf 1908 1458 1908 -Inf 995 725 465 212 -Inf -Inf
3617 2696 -Inf 2696 2978 -Inf 2186 1736 2186 -Inf 1273 1003 743 490 212 -Inf
3870 2949 -Inf 2949 3231 -Inf 2439 1989 2439 -Inf 1526 1256 996 743 465 212
4137 3216 2556 3216 3498 1917 2706 2256 2706 675 1793 1523 1263 1010 732 479
4417 3496 2836 3496 3778 2197 2986 2536 2986 955 2073 1803 1543 1290 1012 759
4695 3774 3114 3774 4056 2475 3264 2814 3264 1233 2351 2081 1821 1568 1290 1037
4975 4054 3394 4054 4336 2755 3544 3094 3544 1513 2631 2361 2101 1848 1570 1317
5267 4346 3686 4346 4628 3047 3836 3386 3836 1805 2923 2653 2393 2140 1862 1609
5551 4630 3970 4630 4912 3331 4120 3670 4120 2089 3207 2937 2677 2424 2146 1893
5849 4928 4268 4928 5210 3629 4418 3968 4418 2387 3505 3235 2975 2722 2444 2191
6148 5227 4567 5227 5509 3928 4717 4267 4717 2686 3804 3534 3274 3021 2743 2490
6509 5588 4928 5588 5870 4289 5078 4628 5078 3047 4165 3895 3635 3382 3104 2851
6803 5882 5222 5882 6164 4583 5372 4922 5372 3341 4459 4189 3929 3676 3398 3145
9176 8255 7595 8255 8537 6956 7745 7295 7745 5714 6832 6562 6302 6049 5771 5518
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

164
Columns 17 through 27
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf 212 -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf 482 -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf 742 -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf 995 -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf 1273 -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf 1526 -Inf -Inf
212 -Inf -Inf -Inf -Inf -Inf -Inf -Inf 1793 -Inf -Inf
492 212 -Inf -Inf -Inf -Inf -Inf -Inf 2073 -Inf -Inf
770 490 212 -Inf -Inf -Inf -Inf -Inf 2351 -Inf -Inf
1050 770 492 212 -Inf -Inf -Inf -Inf 2631 -Inf -Inf
1342 1062 784 504 212 -Inf -Inf -Inf 2923 -Inf -Inf
1626 1346 1068 788 496 212 -Inf -Inf 3207 -Inf -Inf
1924 1644 1366 1086 794 510 212 -Inf 3505 -Inf -Inf
2223 1943 1665 1385 1093 809 511 212 3804 -Inf -Inf
2584 2304 2026 1746 1454 1170 872 573 4165 -Inf -Inf
2878 2598 2320 2040 1748 1464 1166 867 4459 2217 -Inf
5251 4971 4693 4413 4121 3837 3539 3240 6832 4590 848
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

165
Matriks B =
10
5
10
445
944
944
445
1252
885
1265
1632
1902
2162
2415
2693
2946
3213
3493
3771
4051
4343
4627
4925
5224
5585
5879
8252
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

166
Matriks C =
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf 848
Kondisi awal x0 =
10
5
10
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

167
Barisan input u = 0 600 1800 2400 3000 3600
Barisan vektor keadaan sistem x(k) utk k = 0,1, 2, ... :
10 944 2173 3402 4631 5860 7089
5 440 1315 2190 3065 3940 4815
10 944 2173 3402 4631 5860 7089
-Inf 880 1755 2630 3505 4380 5255
-Inf 1878 3107 4336 5565 6794 8023
-Inf 1878 3107 4336 5565 6794 8023
-Inf 880 1755 2630 3505 4380 5255
-Inf 2186 3415 4644 5873 7102 8331
-Inf 1320 2195 3070 3945 4820 5695
-Inf 2186 3415 4644 5873 7102 8331
-Inf 2566 6731 10896 15061 19226 23391
-Inf 2836 7001 11166 15331 19496 23661
-Inf 3096 7261 11426 15591 19756 23921
-Inf 3349 7514 11679 15844 20009 24174
-Inf 3627 7792 11957 16122 20287 24452
-Inf 3880 8045 12210 16375 20540 24705
-Inf 4147 8312 12477 16642 20807 24972
-Inf 4427 8592 12757 16922 21087 25252
-Inf 4705 8870 13035 17200 21365 25530
-Inf 4985 9150 13315 17480 21645 25810
-Inf 5277 9442 13607 17772 21937 26102
-Inf 5561 9726 13891 18056 22221 26386
-Inf 5859 10024 14189 18354 22519 26684
-Inf 6158 10323 14488 18653 22818 26983
-Inf 6519 10684 14849 19014 23179 27344
-Inf 6813 10978 15143 19308 23473 27638
-Inf 9186 13351 17516 21681 25846 30011
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

168
Barisan output sistem y(k) utk k = 1, 2, ... :
10034 14199 18364 22529 26694 30859
>> optio
OPTIMISASI INPUT-OUTPUT Sistem Linear Max-Plus Waktu-Invariant
----------------------------------------------------
Masukkan matriks A [934 -inf -inf -inf 295 -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf
-inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf;-inf 435 -inf 435 -inf -inf
-inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf
-inf -inf -inf -inf;-inf -inf 934 -inf -inf 295 -inf -inf -inf -inf -inf -inf -inf -inf
-inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf;-inf 875 -inf 875 -inf
-inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf
-inf -inf -inf -inf -inf;1868 875 -inf 875 1229 -inf -inf -inf -inf -inf -inf -inf
-inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf;-inf 1315 1868
1315 -inf 1229 -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf
-inf -inf -inf -inf -inf -inf -inf;-inf 875 -inf 875 -inf -inf 365 -inf 365 -inf -inf
-inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf;
2176 1255 -inf 1255 1537 -inf 745 295 745 -inf -inf -inf -inf -inf -inf -inf -inf
-inf -inf -inf -inf -inf -inf -inf -inf -inf -inf;-inf 1315 -inf 1315 -inf -inf 745 -inf
745 -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf
-inf -inf;-inf 1695 2176 1695 -inf 1537 1125 -inf 1125 295 -inf -inf -inf -inf -inf -inf
-inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf;2556 1635 -inf 1635 1917 -inf
1125 675 1125 -inf 212 -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf
-inf 212 -inf -inf;2826 1905 -inf 1905 2187 -inf 1395 945 1395 -inf 482 212 -inf
-inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf 482 -inf -inf;3086 2165 -inf
2165 2447 -inf 1655 1205 1655 -inf 742 472 212 -inf -inf -inf -inf -inf -inf -inf
-inf -inf -inf -inf 742 -inf -inf;3339 2418 -inf 2418 2700 -inf 1908 1458 1908 -inf
995 725 465 212 -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf 995 -inf -inf;
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

169
3617 2696 -inf 2696 2978 -inf 2186 1736 2186 -inf 1273 1003 743 490 212 -inf -inf
-inf -inf -inf -inf -inf -inf -inf 1273 -inf -inf;3870 2949 -inf 2949 3231 -inf 2439
1989 2439 -inf 1526 1256 996 743 465 212 -inf -inf -inf -inf -inf -inf -inf -inf
1526 -inf -inf;4137 3216 2556 3216 3498 1917 2706 2256 2706 675 1793 1523 1263 1010
732 479 212 -inf -inf -inf -inf -inf -inf -inf 1793 -inf -inf;4417 3496 2836 3496
3778 2197 2986 2536 2986 955 2073 1803 1543 1290 1012 759 492 212 -inf -inf -inf
-inf -inf -inf 2073 -inf -inf;4695 3774 3114 3774 4056 2475 3264 2814 3264 1233 2351
2081 1821 1568 1290 1037 770 490 212 -inf -inf -inf -inf -inf 2351 -inf -inf;4975
4054 3394 4054 4336 2755 3544 3094 3544 1513 2631 2361 2101 1848 1570 1317 1050 770
492 212 -inf -inf -inf -inf 2631 -inf -inf;5267 4346 3686 4346 4628 3047 3836 3386
3836 1805 2923 2653 2393 2140 1862 1609 1342 1062 784 504 212 -inf -inf -inf 2923
-inf -inf;5551 4630 3970 4630 4912 3331 4120 3670 4120 2089 3207 2937 2677 2424 2146
1893 1626 1346 1068 788 496 212 -inf -inf 3207 -inf -inf;5849 4928 4268 4928 5210
3629 4418 3968 4418 2387 3505 3235 2975 2722 2444 2191 1924 1644 1366 1086 794 510
212 -inf 3505 -inf -inf;6148 5227 4567 5227 5509 3928 4717 4267 4717 2686 3804 3534
3274 3021 2743 2490 2223 1943 1665 1385 1093 809 511 212 3804 -inf -inf;6509 5588
4928 5588 5870 4289 5078 4628 5078 3047 4165 3895 3635 3382 3104 2851 2584 2304 2026
1746 1454 1170 872 573 4165 -inf -inf;6803 5882 5222 5882 6164 4583 5372 4922 5372
3341 4459 4189 3929 3676 3398 3145 2878 2598 2320 2040 1748 1464 1166 867 4459 2217
-inf;9176 8255 7595 8255 8537 6956 7745 7295 7745 5714 6832 6562 6302 6049 5771 5518
5251 4971 4693 4413 4121 3837 3539 3240 6832 4590 848]
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

170
Masukkan matriks B = [10;
5;
10;
445;
944;
944;
445;
1252;
885;
1265;
1632;
1902;
2162;
2415;
2693;
2946;
3213;
3493;
3771;
4051;
4343;
4627;
4925;
5224;
5585;
5879;
8252]
Masukkan matriks C = [-inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf
-inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf 848]
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

171
Masukkan kondisi awal x0 = [10;
5;
10;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf]
Masukkan barisan output (dalam vektor kolom) y = [10034;14199;18364;22529;26694;30859]
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

172
HASIL PERHITUNGAN :
===================
Matriks A =
Columns 1 through 16
934 -Inf -Inf -Inf 295 -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf 435 -Inf 435 -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf -Inf 934 -Inf -Inf 295 -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf 875 -Inf 875 -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
1868 875 -Inf 875 1229 -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf 1315 1868 1315 -Inf 1229 -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf 875 -Inf 875 -Inf -Inf 365 -Inf 365 -Inf -Inf -Inf -Inf -Inf -Inf -Inf
2176 1255 -Inf 1255 1537 -Inf 745 295 745 -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf 1315 -Inf 1315 -Inf -Inf 745 -Inf 745 -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf 1695 2176 1695 -Inf 1537 1125 -Inf 1125 295 -Inf -Inf -Inf -Inf -Inf -Inf
2556 1635 -Inf 1635 1917 -Inf 1125 675 1125 -Inf 212 -Inf -Inf -Inf -Inf -Inf
2826 1905 -Inf 1905 2187 -Inf 1395 945 1395 -Inf 482 212 -Inf -Inf -Inf -Inf
3086 2165 -Inf 2165 2447 -Inf 1655 1205 1655 -Inf 742 472 212 -Inf -Inf -Inf
3339 2418 -Inf 2418 2700 -Inf 1908 1458 1908 -Inf 995 725 465 212 -Inf -Inf
3617 2696 -Inf 2696 2978 -Inf 2186 1736 2186 -Inf 1273 1003 743 490 212 -Inf
3870 2949 -Inf 2949 3231 -Inf 2439 1989 2439 -Inf 1526 1256 996 743 465 212
4137 3216 2556 3216 3498 1917 2706 2256 2706 675 1793 1523 1263 1010 732 479
4417 3496 2836 3496 3778 2197 2986 2536 2986 955 2073 1803 1543 1290 1012 759
4695 3774 3114 3774 4056 2475 3264 2814 3264 1233 2351 2081 1821 1568 1290 1037
4975 4054 3394 4054 4336 2755 3544 3094 3544 1513 2631 2361 2101 1848 1570 1317
5267 4346 3686 4346 4628 3047 3836 3386 3836 1805 2923 2653 2393 2140 1862 1609
5551 4630 3970 4630 4912 3331 4120 3670 4120 2089 3207 2937 2677 2424 2146 1893
5849 4928 4268 4928 5210 3629 4418 3968 4418 2387 3505 3235 2975 2722 2444 2191
6148 5227 4567 5227 5509 3928 4717 4267 4717 2686 3804 3534 3274 3021 2743 2490
6509 5588 4928 5588 5870 4289 5078 4628 5078 3047 4165 3895 3635 3382 3104 2851
6803 5882 5222 5882 6164 4583 5372 4922 5372 3341 4459 4189 3929 3676 3398 3145
9176 8255 7595 8255 8537 6956 7745 7295 7745 5714 6832 6562 6302 6049 5771 5518
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

173
Columns 17 through 27
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf 212 -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf 482 -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf 742 -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf 995 -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf 1273 -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf 1526 -Inf -Inf
212 -Inf -Inf -Inf -Inf -Inf -Inf -Inf 1793 -Inf -Inf
492 212 -Inf -Inf -Inf -Inf -Inf -Inf 2073 -Inf -Inf
770 490 212 -Inf -Inf -Inf -Inf -Inf 2351 -Inf -Inf
1050 770 492 212 -Inf -Inf -Inf -Inf 2631 -Inf -Inf
1342 1062 784 504 212 -Inf -Inf -Inf 2923 -Inf -Inf
1626 1346 1068 788 496 212 -Inf -Inf 3207 -Inf -Inf
1924 1644 1366 1086 794 510 212 -Inf 3505 -Inf -Inf
2223 1943 1665 1385 1093 809 511 212 3804 -Inf -Inf
2584 2304 2026 1746 1454 1170 872 573 4165 -Inf -Inf
2878 2598 2320 2040 1748 1464 1166 867 4459 2217 -Inf
5251 4971 4693 4413 4121 3837 3539 3240 6832 4590 848
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

174
Matriks B =
10
5
10
445
944
944
445
1252
885
1265
1632
1902
2162
2415
2693
2946
3213
3493
3771
4051
4343
4627
4925
5224
5585
5879
8252
Matriks C = -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf 848
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

175
Kondisi awal x0 =
10
5
10
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

176
Barisan output y =
10034
14199
18364
22529
26694
30859
Barisan input paling lambat u_topi =
934 5099 9264 13429 17594 21759
Barisan output y untuk u_topi =
10034 14199 18364 22529 26694 30859
Barisan input minimum simpangan u_tilde =
934 5099 9264 13429 17594 21759
Barisan output y untuk u_tilde =
10034 14199 18364 22529 26694 30859
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
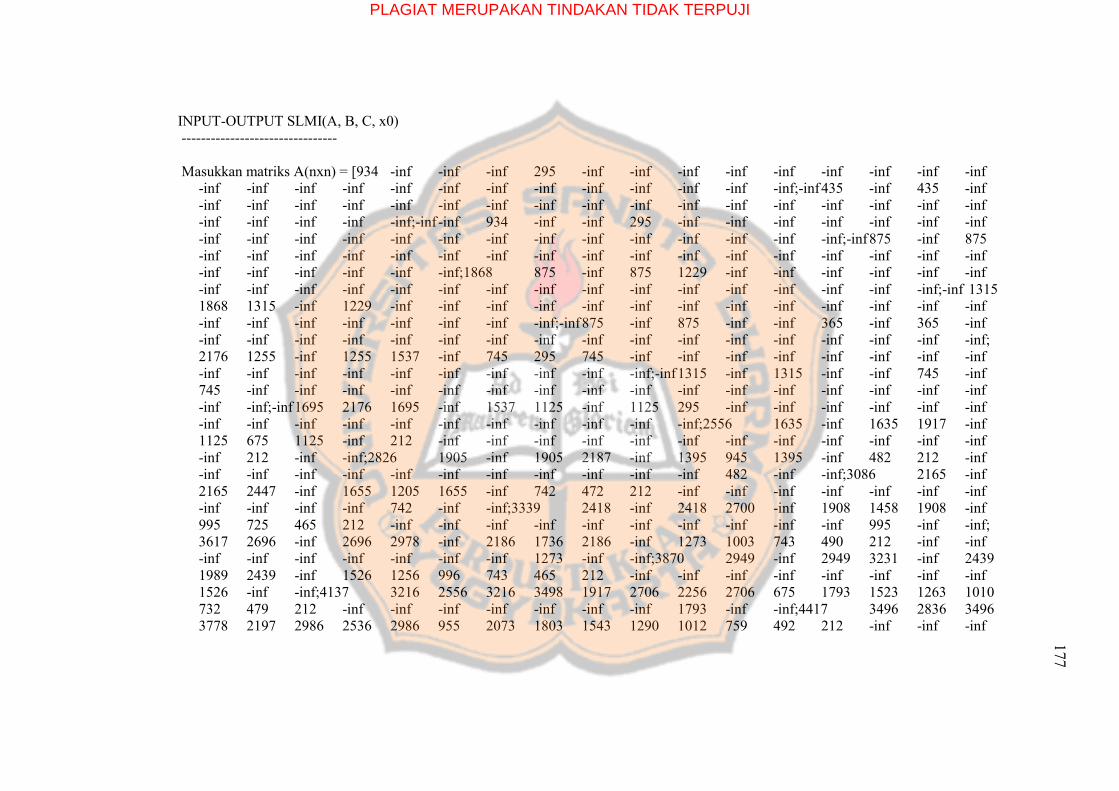
177
INPUT-OUTPUT SLMI(A, B, C, x0)
--------------------------------
Masukkan matriks A(nxn) = [934 -inf -inf -inf 295 -inf -inf -inf -inf -inf -inf -inf -inf -inf
-inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf;-inf 435 -inf 435 -inf
-inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf
-inf -inf -inf -inf -inf;-inf -inf 934 -inf -inf 295 -inf -inf -inf -inf -inf -inf -inf
-inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf;-inf 875 -inf 875
-inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf
-inf -inf -inf -inf -inf -inf;1868 875 -inf 875 1229 -inf -inf -inf -inf -inf -inf
-inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf;-inf 1315
1868 1315 -inf 1229 -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf
-inf -inf -inf -inf -inf -inf -inf -inf;-inf 875 -inf 875 -inf -inf 365 -inf 365 -inf
-inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf;
2176 1255 -inf 1255 1537 -inf 745 295 745 -inf -inf -inf -inf -inf -inf -inf -inf
-inf -inf -inf -inf -inf -inf -inf -inf -inf -inf;-inf 1315 -inf 1315 -inf -inf 745 -inf
745 -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf
-inf -inf;-inf 1695 2176 1695 -inf 1537 1125 -inf 1125 295 -inf -inf -inf -inf -inf -inf
-inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf;2556 1635 -inf 1635 1917 -inf
1125 675 1125 -inf 212 -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf
-inf 212 -inf -inf;2826 1905 -inf 1905 2187 -inf 1395 945 1395 -inf 482 212 -inf
-inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf 482 -inf -inf;3086 2165 -inf
2165 2447 -inf 1655 1205 1655 -inf 742 472 212 -inf -inf -inf -inf -inf -inf -inf
-inf -inf -inf -inf 742 -inf -inf;3339 2418 -inf 2418 2700 -inf 1908 1458 1908 -inf
995 725 465 212 -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf 995 -inf -inf;
3617 2696 -inf 2696 2978 -inf 2186 1736 2186 -inf 1273 1003 743 490 212 -inf -inf
-inf -inf -inf -inf -inf -inf -inf 1273 -inf -inf;3870 2949 -inf 2949 3231 -inf 2439
1989 2439 -inf 1526 1256 996 743 465 212 -inf -inf -inf -inf -inf -inf -inf -inf
1526 -inf -inf;4137 3216 2556 3216 3498 1917 2706 2256 2706 675 1793 1523 1263 1010
732 479 212 -inf -inf -inf -inf -inf -inf -inf 1793 -inf -inf;4417 3496 2836 3496
3778 2197 2986 2536 2986 955 2073 1803 1543 1290 1012 759 492 212 -inf -inf -inf
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

178
-inf -inf -inf 2073 -inf -inf;4695 3774 3114 3774 4056 2475 3264 2814 3264 1233 2351
2081 1821 1568 1290 1037 770 490 212 -inf -inf -inf -inf -inf 2351 -inf -inf;4975
4054 3394 4054 4336 2755 3544 3094 3544 1513 2631 2361 2101 1848 1570 1317 1050 770
492 212 -inf -inf -inf -inf 2631 -inf -inf;5267 4346 3686 4346 4628 3047 3836 3386
3836 1805 2923 2653 2393 2140 1862 1609 1342 1062 784 504 212 -inf -inf -inf 2923
-inf -inf;5551 4630 3970 4630 4912 3331 4120 3670 4120 2089 3207 2937 2677 2424 2146
1893 1626 1346 1068 788 496 212 -inf -inf 3207 -inf -inf;5849 4928 4268 4928 5210
3629 4418 3968 4418 2387 3505 3235 2975 2722 2444 2191 1924 1644 1366 1086 794 510
212 -inf 3505 -inf -inf;6148 5227 4567 5227 5509 3928 4717 4267 4717 2686 3804 3534
3274 3021 2743 2490 2223 1943 1665 1385 1093 809 511 212 3804 -inf -inf;6509 5588
4928 5588 5870 4289 5078 4628 5078 3047 4165 3895 3635 3382 3104 2851 2584 2304 2026
1746 1454 1170 872 573 4165 -inf -inf;6803 5882 5222 5882 6164 4583 5372 4922 5372
3341 4459 4189 3929 3676 3398 3145 2878 2598 2320 2040 1748 1464 1166 867 4459 2217
-inf;9176 8255 7595 8255 8537 6956 7745 7295 7745 5714 6832 6562 6302 6049 5771 5518
5251 4971 4693 4413 4121 3837 3539 3240 6832 4590 848]
Masukkan matriks B(nx1) = [10;
5;
10;
445;
944;
944;
445;
1252;
885;
1265;
1632;
1902;
2162;
2415;
2693;
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

179
2946;
3213;
3493;
3771;
4051;
4343;
4627;
4925;
5224;
5585;
5879;
8252]
Masukkan matriks C(1xn) = [-inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf
-inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf -inf 848]
Masukkan kondisi awal x0(nx1) = [10;
5;
10;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf;
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

180
-inf;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf;
-inf]
Masukkan barisan input sp kej ke-k u(kx1) = [934;5099;9264;13429;17594]
HASIL PERHITUNGAN :
===================
Matriks A =
Columns 1 through 16
934 -Inf -Inf -Inf 295 -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf 435 -Inf 435 -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf -Inf 934 -Inf -Inf 295 -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf 875 -Inf 875 -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
1868 875 -Inf 875 1229 -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf 1315 1868 1315 -Inf 1229 -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf 875 -Inf 875 -Inf -Inf 365 -Inf 365 -Inf -Inf -Inf -Inf -Inf -Inf -Inf
2176 1255 -Inf 1255 1537 -Inf 745 295 745 -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf 1315 -Inf 1315 -Inf -Inf 745 -Inf 745 -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf 1695 2176 1695 -Inf 1537 1125 -Inf 1125 295 -Inf -Inf -Inf -Inf -Inf -Inf
2556 1635 -Inf 1635 1917 -Inf 1125 675 1125 -Inf 212 -Inf -Inf -Inf -Inf -Inf
2826 1905 -Inf 1905 2187 -Inf 1395 945 1395 -Inf 482 212 -Inf -Inf -Inf -Inf
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

181
3086 2165 -Inf 2165 2447 -Inf 1655 1205 1655 -Inf 742 472 212 -Inf -Inf -Inf
3339 2418 -Inf 2418 2700 -Inf 1908 1458 1908 -Inf 995 725 465 212 -Inf -Inf
3617 2696 -Inf 2696 2978 -Inf 2186 1736 2186 -Inf 1273 1003 743 490 212 -Inf
3870 2949 -Inf 2949 3231 -Inf 2439 1989 2439 -Inf 1526 1256 996 743 465 212
4137 3216 2556 3216 3498 1917 2706 2256 2706 675 1793 1523 1263 1010 732 479
4417 3496 2836 3496 3778 2197 2986 2536 2986 955 2073 1803 1543 1290 1012 759
4695 3774 3114 3774 4056 2475 3264 2814 3264 1233 2351 2081 1821 1568 1290 1037
4975 4054 3394 4054 4336 2755 3544 3094 3544 1513 2631 2361 2101 1848 1570 1317
5267 4346 3686 4346 4628 3047 3836 3386 3836 1805 2923 2653 2393 2140 1862 1609
5551 4630 3970 4630 4912 3331 4120 3670 4120 2089 3207 2937 2677 2424 2146 1893
5849 4928 4268 4928 5210 3629 4418 3968 4418 2387 3505 3235 2975 2722 2444 2191
6148 5227 4567 5227 5509 3928 4717 4267 4717 2686 3804 3534 3274 3021 2743 2490
6509 5588 4928 5588 5870 4289 5078 4628 5078 3047 4165 3895 3635 3382 3104 2851
6803 5882 5222 5882 6164 4583 5372 4922 5372 3341 4459 4189 3929 3676 3398 3145
9176 8255 7595 8255 8537 6956 7745 7295 7745 5714 6832 6562 6302 6049 5771 5518
Columns 17 through 27
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf 212 -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf 482 -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf 742 -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf 995 -Inf -Inf
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

182
Matriks B =
10
5
10
445
944
944
445
1252
885
1265
1632
1902
2162
2415
2693
2946
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf 1273 -Inf -Inf
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf 1526 -Inf -Inf
212 -Inf -Inf -Inf -Inf -Inf -Inf -Inf 1793 -Inf -Inf
492 212 -Inf -Inf -Inf -Inf -Inf -Inf 2073 -Inf -Inf
770 490 212 -Inf -Inf -Inf -Inf -Inf 2351 -Inf -Inf
1050 770 492 212 -Inf -Inf -Inf -Inf 2631 -Inf -Inf
1342 1062 784 504 212 -Inf -Inf -Inf 2923 -Inf -Inf
1626 1346 1068 788 496 212 -Inf -Inf 3207 -Inf -Inf
1924 1644 1366 1086 794 510 212 -Inf 3505 -Inf -Inf
2223 1943 1665 1385 1093 809 511 212 3804 -Inf -Inf
2584 2304 2026 1746 1454 1170 872 573 4165 -Inf -Inf
2878 2598 2320 2040 1748 1464 1166 867 4459 2217 -Inf
5251 4971 4693 4413 4121 3837 3539 3240 6832 4590 848
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

183
3213
3493
3771
4051
4343
4627
4925
5224
5585
5879
8252
Matriks C =
-Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf -Inf 848
Kondisi awal x0 =
10
5
10
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

184
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
-Inf
Barisan input u =
934 5099 9264 13429 17594
Barisan vektor keadaan sistem x(k) utk k = 0,1, 2, ... :
10 944 5109 9274 13439 17604
5 939 5104 9269 13434 17599
10 944 5109 9274 13439 17604
-Inf 1379 5544 9709 13874 18039
-Inf 1878 6043 10208 14373 18538
-Inf 1878 6043 10208 14373 18538
-Inf 1379 5544 9709 13874 18039
-Inf 2186 6351 10516 14681 18846
-Inf 1819 5984 10149 14314 18479
-Inf 2199 6364 10529 14694 18859
-Inf 2566 6731 10896 15061 19226
-Inf 2836 7001 11166 15331 19496
-Inf 3096 7261 11426 15591 19756
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

185
-Inf 3349 7514 11679 15844 20009
-Inf 3627 7792 11957 16122 20287
-Inf 3880 8045 12210 16375 20540
-Inf 4147 8312 12477 16642 20807
-Inf 4427 8592 12757 16922 21087
-Inf 4705 8870 13035 17200 21365
-Inf 4985 9150 13315 17480 21645
-Inf 5277 9442 13607 17772 21937
-Inf 5561 9726 13891 18056 22221
-Inf 5859 10024 14189 18354 22519
-Inf 6158 10323 14488 18653 22818
-Inf 6519 10684 14849 19014 23179
-Inf 6813 10978 15143 19308 23473
-Inf 9186 13351 17516 21681 25846
Barisan output sistem y(k) utk k = 1, 2, ... :
10034 14199 18364 22529 26694
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

186
LAMPIRAN IV
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

187
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI


















