Zupt Inertial Metrology - SUT / THS Subsea Metrology Seminar
One-dimensional gradient-indexmetrology based on ray slopemeasurements using a bootstrapalgorithm
Di LinJames R. LegerMint KunkelPeter McCarthy
Downloaded From: http://opticalengineering.spiedigitallibrary.org/ on 02/24/2014 Terms of Use: http://spiedl.org/terms
One-dimensional gradient-index metrology based on rayslope measurements using a bootstrap algorithm
Di LinJames R. LegerMint KunkelUniversity of MinnesotaDepartment of Electrical and Computer
EngineeringMinneapolis, Minnesota 55455E-mail: [email protected]
Peter McCarthyUniversity of RochesterInstitute of OpticsRochester, New York 14627-0186
Abstract. The refractive index profile of one-dimensional gradient-index(GRIN) samples can be measured using the incident and exit beam anglesof multiple beams passing through the sample at different positions alongthe index gradient. Beginning from a region of known refractive index, thecollective angular deflection measurement of multiple beams is boot-strapped to compute the index profile of the entire sample. An alternativemethod using an approximate beam displacement model and a correctivealgorithm is also presented. The two techniques are used to measure theindex profile of a thick GRIN sample, and experimental results show goodagreement with a maximum discrepancy of 1.5 × 10−3 in the calculatedindex. An index accuracy of 5 × 10−4 is predicted for the bootstrap methodemploying typical micron-level spatial measurements. © 2013 Society of Photo-Optical Instrumentation Engineers (SPIE) [DOI: 10.1117/1.OE.52.11.112108]
Subject terms: deflectometry; metrology; gradient index; geometric optics.
Paper 130579SS received Apr. 15, 2013; revised manuscript received Jun. 14,2013; accepted for publication Jun. 17, 2013; published online Jul. 16, 2013.
1 IntroductionRecent developments in the fabrication of gradient-index(GRIN) materials make it possible to create increasinglycomplex refractive index distributions. Several of these fab-rication techniques are reported and discussed in Ref. 1.These GRIN materials are proving to be useful in a varietyof applications. Fibers pulled from GRIN preforms can bedesigned to reduce modal dispersion and thereby increasethe bandwidth and repeater distance of optical communica-tion systems. Lenses made using GRIN profiles find appli-cation in telecommunications and compact imaging, wheretheir small size and flat faces give them attractive packagingproperties. GRIN elements can also be combined with con-ventional homogeneous glass elements to broaden the designspace of imaging lenses. In particular, GRIN lensmaterials often have unique dispersion characteristics, mak-ing them useful for chromatic aberration correction.2 Finally,in recent studies, GRIN materials have shown utility incoherent mode conversion and beam shaping applications.3,4
The integration of GRIN elements into an optical systemrequires an accurate knowledge of the optical properties ofthe inhomogeneous materials. The refractive index distribu-tion of the GRIN element is of paramount importancebecause it determines the propagation behavior of lightinside the medium. Conventional beam deflectometry meth-ods use beam displacement5,6 or beam angle7 as a directmeasurement of the index gradient. These methods are accu-rate only where the index gradient remains relatively con-stant across the beam trajectory inside the sample. When asignificant amount of refraction occurs inside the sample,fundamental geometric assumptions in these methodsbecome invalid and the measurements are difficult to inter-pret. Interferometric methods use fringe patterns to recoverthe phase profile of a beam propagating through the GRINsample.8 However, as the propagation distance through the
sample becomes substantial, resolving fringes becomesimpractical. In addition, ambiguity of the propagated phaseprofile can result from interferometric measurements withoutprior knowledge of the type of index variations present in theGRIN sample (e.g., diffusion-based GRIN elements may berestricted to regions of monotonic index variations based onthe physics of diffusion). This makes interferometry unreli-able for measuring arbitrary GRIN materials. Holographicmethods have also been proposed that use multidirectionalmeasurements of optical path length to recover the index dis-tribution of GRIN samples.9 However, the approximationsmade in these methods are not well suited to applicationswhere a significant amount of refraction occurs inside thesample. In addition, data acquisition using holography canbe very tedious. Older methods that do not have a practicalautomated process of data acquisition and have difficulties inaccurate measurements when moderate index gradients arepresent include prism methods10,11 and moiré patterns.12,13
In this paper, we propose a new measurement techniquethat is based on a very simple fundamental relation for one-dimensional (1-D) GRIN distributions14 that does not haveimplicit restrictions on the magnitude of the index gradient.This method is appropriate for both longitudinal index gra-dients nðyÞ and radial index gradients nðrÞ. We show a verystraightforward method to acquire the necessary data anddescribe a procedure for its analysis. We contrast this witha second method that uses an iterative ray trace algorithm tocorrect for intrinsic errors in previous measurementprocedures.
2 Ray Slope Measurements and the BootstrapAlgorithm
The bootstrap algorithm relies on a fundamental relation thatfollows directly from the ray equation in geometric optics.
dds
�ndr⇀
ds
�¼ ∇n; (1)
0091-3286/2013/$25.00 © 2013 SPIE
Optical Engineering 112108-1 November 2013/Vol. 52(11)
Optical Engineering 52(11), 112108 (November 2013)
Downloaded From: http://opticalengineering.spiedigitallibrary.org/ on 02/24/2014 Terms of Use: http://spiedl.org/terms
http://dx.doi.org/10.1117/1.OE.52.11.112108http://dx.doi.org/10.1117/1.OE.52.11.112108http://dx.doi.org/10.1117/1.OE.52.11.112108http://dx.doi.org/10.1117/1.OE.52.11.112108http://dx.doi.org/10.1117/1.OE.52.11.112108http://dx.doi.org/10.1117/1.OE.52.11.112108
where ds is the arc length along the ray path, r⇀is the position
vector of a point on the ray trajectory, and n is the refractiveindex. If the index is only allowed to vary along y, the refrac-tive indices at two locations along a ray path are related bythe slope of the ray at those locations14 (see Appendix):
1þ ðy 01Þ21þ ðy 02Þ2
¼ nðy1Þ2
nðy2Þ2; (2)
where y 0 ¼ dydx denotes the slope of the ray at position y. Ifthe locations are taken to be the ray path at the input andoutput surfaces outside the GRIN sample, then the applica-tion of Snell’s law of refraction at those surfaces changes therelationship in Eq. (2) to
nðyoutÞ2 ¼ nðyinÞ2 þ n2amb� ðy 0outÞ21þ ðy 0outÞ2
−ðy 0inÞ2
1þ ðy 0inÞ2�; (3)
where namb is the refractive index of the ambient medium.14
The quantities of interest are illustrated in Fig. 1.Equation (3) is the fundamental relation for the bootstrap
algorithm. The method requires a measurement of the probebeam’s input and output positions as well as its input andoutput angles. It uses the index at the input end of thebeam to calculate the index at the output end, or viceversa. Theoretically, it is possible to solve for the index dis-tribution along a beam path that connects the input and out-put rays by inverting an integral equation relating the beampath and the refractive index distribution.15 However, a sol-ution to the inversion of the integral equation is not alwaysguaranteed when measurement errors are present. In thebootstrap algorithm, only the refractive indices at the inputand output locations of each ray path are pertinent. If therefractive index is known at some position y0, then theindex everywhere in the GRIN sample can be calculatedusing the relation in Eq. (3) if the input positions of all probebeams used in the measurement coincide with y0, as illus-trated in Fig. 2. In practice, however, the range of inputangles for the probe beams is restricted by total internalreflection conditions. This limits the region of the GRINsample that can be measured in convenient experimentalsetups.
The index is more typically known at the ends of theGRIN sample. In this case, angled incidence can be usedto relate the fundamental expression in Eq. (3) for multipleray paths (i.e., the trajectories of different probe beams) andthe collective measurement can be bootstrapped to computethe index distribution across the entire sample. In this meas-urement geometry, as shown in Fig. 3, the incident beam isangled to ensure there are always rays traveling from aknown region of the GRIN profile to the unknown region(or vice versa).
The expansion of the known region of the GRIN profilecan be readily seen in Fig. 3, where the initially knownregion of the sample is below the green dashed line. Theray farthest from the known region that can be used to cal-culate the index in the initially unknown region has outputposition y1. With the help of Eq. (3), index values can becalculated up to y3 and all values for y < y3 can be interpo-lated from known or calculated values. This expands theknown region up to y3, allowing the output ray at y2 to beused in a subsequent calculation. This process is defined asone bootstrap in the algorithm, i.e., the process of expandingthe calculated index profile of the sample by applying Eq. (3)to all applicable rays. Each bootstrap will yield new infor-mation about the sample until all rays from the measurementhave been exhausted and the entire index distribution hasbeen computed. It is important to bear in mind that the boot-strap process can terminate early if the incident angle is tooshallow and ray trajectories are bent aggressively toward theunknown region by steep index gradients. In general, choos-ing the appropriate angle of incidence and a sufficient num-ber of probe beams is enough to guarantee the completion ofthe algorithm.
3 Finite Beam Width Effects and Beam ShapingIndex gradients in inhomogeneous transparent materials areable to manipulate the propagation of light rays inside themedium, distorting the irradiance profile of an optical beampassing through the sample. If the beam is narrow relative tothe index gradient, the distortion to its irradiance profile isnegligible and the beam behaves like an ideal light ray(assuming diffraction can be ignored). However, a significantchange in the index gradient across the transverse profile ofthe optical beam will cause a redistribution of the beam’sirradiance. This beam shaping effect can yield additionalinformation about the index distribution in question.
Fig. 1 Illustrating the fundamental relation in Eq. (3).
Fig. 2 Measuring refractive index of a GRIN sample from a knownvalue at position y0.
Fig. 3 Angled incidence for bootstrapping refractive indexcalculations.
Optical Engineering 112108-2 November 2013/Vol. 52(11)
Lin et al.: One-dimensional gradient-index metrology based on ray slope measurements. . .
Downloaded From: http://opticalengineering.spiedigitallibrary.org/ on 02/24/2014 Terms of Use: http://spiedl.org/terms
Energy conservation allows for a correspondence betweenthe field description of an optical beam and an equivalent raydistribution2 when diffraction effects are negligible. Uponestablishing this relationship, beam shaping in inhomo-geneous media can be treated as a distributed version ofbeam deflection. An important question to ask is how thepropagation behavior of a finite-sized optical beam in aninhomogeneous medium matches the behavior of the desiredideal ray. In experimental measurements involving finite-sized probe beams, the median of the beam irradiance profilecan be used as an estimate of the location of the ideal ray. Inthe limit of infinitesimally small beam width, the ideal raymust follow a path dictated by Eq. (1). As the beam sizeincreases, it can be shown through energy conservation thatif the individual paths of the rays contained in the opticalbeam do not intersect with the ideal ray, the ideal ray pathwill always coincide with the median of the optical beam, ascan be seen in Fig. 4.
If all rays in Fig. 4 carry the same amount of radiativeflux, then the total integrated flux on either side of the idealray (dashed red) is constant between the two planes andthe location of the median must follow the path of theideal ray. Thus, a location of a single ray can be effectivelymeasured with a finite-sized beam by using the median of thebeam intensity under these circumstances. This is particu-larly useful for experimental measurements.
Since beam shaping effects can be treated as a distributedversion of beam deflection, it is possible to obtain all thebeam deflection data required for the deflectometry measure-ment using a single optical beam of sufficient width. Bymeasuring the irradiance profiles in two observation planesoutside the sample and applying energy conservation, a raydistribution (specifying both angles and positions) can beextrapolated for any plane outside the sample. An advantageof using a simple beam shaping measurement with a widebeam is that only a single measurement is needed. The caveatis that because energy conservation is only applied at theobservation planes where the beam’s irradiance profile ismeasured, it is assumed that the individual rays do not inter-sect with each other between observation planes. This con-dition imposes a constraint on the geometry of theexperiment. However, the primary issue for this type ofmeasurement is the presence of coherent noise in the system.Due to the nature of this calculation, noisy irradiance profilescan introduce a significant shift in the constituent raypositions at the observation planes. The uncertainty in calcu-lated ray positions due to coherent noise is typically much
greater than the uncertainty in conventional beam deflectionmeasurements.
4 Beam Deflectometry Based on Ray PositionIn order to assess the performance of our proposed method,we have compared it to previous methods of beam deflec-tometry based on measuring the entering and exiting raypositions rather than the ray angles.5 These methods containinherent approximations and are thus expected to be lessaccurate than the one proposed in Sec. 2. In addition, themethod described in Ref. 5 requires normal incidence onone surface of the GRIN sample in order to reduce the com-plexity of the measurement.
The method is briefly described in Fig. 5. If a circular raypath is assumed inside the GRIN material and small-angleapproximations are taken, the displacement of a beam in adistant plane from its initial position is
∂n∂y
≈ΔLD
; (4)
where D is the propagation distance from the sample exitsurface to the distant plane and L is the thickness of the sam-ple. The measured deflection data over the sample, ΔðyÞ, canthen be integrated to arrive at the relative index distribution.The assumptions and approximations made in this methodallow for the displacement of the beam to be measured inone plane, rather than two planes, as required in the bootstrapmethod to measure angular deflection of the beam. However,the approximations in this method ultimately limit the accu-racy of the measurement.
In order to improve the measurement accuracy of thismethod, an iterative ray trace correction algorithm was devel-oped using the result of Eq. (4) as a starting point. An errormetric is defined as the root-mean-squared (RMS) differencebetween the measured deflection data and calculated deflec-tion data using forward ray tracing through the GRIN sam-ple, including free-space propagation to the observationplane. The GRIN profile is parameterized such that an opti-mization can be performed over the GRIN parameters tominimize the error metric. Any appropriate parameterizationcan be used, but cubic splines offer a practical and flexibleparameter space. The locations of the spline knots are opti-mized until the resulting index profile produces ray tracedeflection data that are consistent with the measured data.An inherent advantage of this type of approach is that addi-tional sample parameters that affect measurement accuracy,such as wedge and surface shape, can be accounted for in theforward ray trace (so long as they can be measured.)
Plane 2
Plane 1 Rays carrying flux
Fig. 4 An ideal ray (dashed red) tracking the median of an opticalbeam’s irradiance profile. Fig. 5 Deflectometry geometry in the ray displacement method.
Optical Engineering 112108-3 November 2013/Vol. 52(11)
Lin et al.: One-dimensional gradient-index metrology based on ray slope measurements. . .
Downloaded From: http://opticalengineering.spiedigitallibrary.org/ on 02/24/2014 Terms of Use: http://spiedl.org/terms
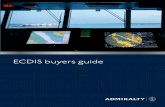
5 Experimental MeasurementThe foregoing theoretical discussion suggests two GRINmetrology techniques: a ray slope method using a bootstrapalgorithm (described in Sec. 2) and a ray position method(described in Sec. 4) using an iterative correction algorithm.The ray slope method, based on Eq. (3), requires beam posi-tion and angle measurements at the input and output surfacesof the GRIN sample. These quantities are obtained using arelatively straightforward benchtop setup, illustrated inFig. 6. The position of the beam at the output surface ofthe sample is extrapolated from beam position measurementsin two observation planes. In the ray position method, thegeometry is simpler, where the probe beam is normally inci-dent and beam position is only measured in one observationplane behind the GRIN sample (as seen in Fig. 5).
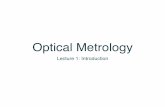
The calculated index profiles obtained from the two meas-urement techniques described in the preceding sections, aswell as the discrepancy between them, are shown in Fig. 7.The sample used was a polymer blend of polymethyl meth-acrylate and polystyrene produced at the University ofRochester with a thickness of 14.03 mm. The two calculatedprofiles are in good agreement, but it cannot be determinedwhich of the two methods is more accurate since the actualindex profile of the sample is unknown. Given the uncer-tainty in position measurements, it is possible to obtain anerror bound (as well as the expected error) for the calculatedindex distribution. The error analysis for both methods isdeferred to a later section. The maximum discrepancybetween the index distributions calculated from both meth-ods in this particular measurement is 1.5 × 10−3. This is
reasonable considering the uncertainty in position measure-ments and a relatively short propagation distance (2.2 cm)between the output face of the sample and the farthest obser-vation plane. To improve measurement accuracy in the rayslope method, the propagation distance between observationplane 1 and the sample should be minimized while extendingthe propagation distance to observation plane 2. Similarly,increasing the propagation distance between the sampleand the observation plane will reduce error buildup in theray position method.
6 Intrinsic Error Analysis
6.1 Ray Position Method
The ray displacement method described in Sec. 4 uses first-order small-angle approximations along with other simplify-ing assumptions. When beam displacement inside the GRINsample becomes significant, these assumptions break downand a substantial error can result in the calculated index. Thefollowing analysis provides a second-order correction termto the small-angle approximation and addresses finite beamdeflection taking place inside the sample. The differencebetween the geometry of beam deflection and its approxi-mated model is illustrated in Fig. 8.
Retaining the second-order terms in the small-angleapproximations, one finds that
ΔGRIN ¼ R½1 − cosðθ1Þ� ≈n∂n∂y
1
2θ21: (5)
Consequently, the first-order expression in Eq. (4)becomes (following a similar derivation used in Ref. 5)
∂n∂y
¼ ΔtotLDþ L2
2n
; (6)
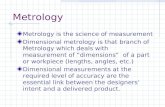
where Δtot ¼ ΔGRIN þ Δext is the total beam displacement.Equation (6) provides a more accurate description (secondorder) of the index profile, especially in thicker samples orwhere the index distributions contain significant gradients. Aforward ray trace (simulation) is performed for normallyincident beams propagating through a GRIN sample withan index distribution shown in Fig. 9(a). The sample thick-ness is 0.3 cm and the measurement plane is placed 0.5 cmaway from the output surface of the sample. These
Beam profilerGRIN sample
Probe beam
Observation plane 1
Observation plane 2
Fig. 6 Experimental setup for measuring 1-D gradient index (GRIN)profiles using angled incidence.
-20 -10 0 10 20
1.48
1.5
1.52
1.54
1.56
1.58
y (mm)
Ref
ract
ive
inde
x
Ray slope methodRay displacement method
-30 -20 -10 0 10 20 30-1.5
-1
-0.5
0
0.5
1
1.5
2x 10
-3
y (mm)
xedni
evitcarfer
niycn
a percsi
D
Fig. 7 Comparison between index profiles measured using the ray slope method and the ray displacement method.
Optical Engineering 112108-4 November 2013/Vol. 52(11)
Lin et al.: One-dimensional gradient-index metrology based on ray slope measurements. . .
Downloaded From: http://opticalengineering.spiedigitallibrary.org/ on 02/24/2014 Terms of Use: http://spiedl.org/terms
simulation parameters were chosen such that substantialerror in the index would result from approximations madein the ray position method of Sec. 4. The improvement inthe computation error after applying Eq. (6) can be seenin Fig. 9(b).
It is clear that even a second-order small-angle approxi-mation will not suffice under these conditions. Fundamentalassumptions in the approximate model also break downunder similar circumstances. In particular, the actual ray tra-jectory will deviate from the assumed circular arc under aconstant index gradient, as shown in Fig. 10. The circulararc remains a relatively good approximation in thicker sam-ples compared to the more commonly used parabolic raypath in small-angle approximations. However, any assumedray path under a constant index gradient becomes problem-atic in thick samples because the index gradient generallydoes not remain constant across the ray path.
These intrinsic errors are corrected by the iterative raytrace algorithm following the initial calculation from Eq. (6)[in lieu of Eq. (4) for faster convergence]. The result is shownin Fig. 11. The remaining error primarily originates fromquantization and parameterization effects in the forwardray trace used to generate the beam deflection data and isnot a limitation to the accuracy that can be achieved bythe algorithm.
6.2 Ray Slope Method
A similar simulation is performed for the same GRIN profileshown in Fig. 9(a) using the ray slope method. Beam deflec-tion data are generated from a forward ray trace for probebeams incident at θ ¼ π∕7 rad. The index calculated fromthe bootstrap algorithm and the resulting error is shown in
(a) (b)
∆
1
2
∆2
∆
1
Fig. 8 Difference between (a) beam deflection geometry and (b) first-order small-angle model.
-1 -0.5 0 0.5 11.35
1.4
1.45
1.5
1.55
1.6
y (cm)
Ref
ract
ive
inde
x
-1 -0.5 0 0.5 10
0.01
0.02
0.03
0.04
0.05
y (cm)
Err
or in
ref
ract
ive
inde
x
1st order2nd order
(a) (b)
Fig. 9 (a) Index profile used in simulation to generate beam displacement data. (b) Intrinsic errors in index values resulting from first- and second-order approximations. Simulation parameters are set to L ¼ 0.3 cm and D ¼ 0.5 cm.
0 1 2 3 4 5 6-2.5
-2
-1.5
-1
-0.5
0
0.5
z (cm)
y (c
m)
Ray traceCircular arcParabolic approximation
Fig. 10 Intrinsic error in the ray path assumed in the ray positionmethod under a constant index gradient of 0.1 cm−1.
Optical Engineering 112108-5 November 2013/Vol. 52(11)
Lin et al.: One-dimensional gradient-index metrology based on ray slope measurements. . .
Downloaded From: http://opticalengineering.spiedigitallibrary.org/ on 02/24/2014 Terms of Use: http://spiedl.org/terms
Fig. 12. We hasten to add this error does not represent a fun-damental limit on the accuracy of the bootstrap algorithm.Since no approximations were used in the derivation ofthe fundamental relation in Eq. (3), any intrinsic (nonmea-surement-based) error in the ray slope method is due simplyto the accuracy of the interpolator used in the bootstrapalgorithm.
7 Measurement Error AnalysisIn this section, we examine the effects of measurement erroron both methods. Error propagation is of particular concernsince calculated index values are used in subsequent calcu-lations in the bootstrap algorithm and integration over calcu-lated gradients is used to find the index distribution in the raydisplacement method.
In order to quantify the accumulation of error from thebootstrap process, sources of measurement error need tobe identified. Starting with the fundamental relation fromEq. (3) and assuming the probe beams are traveling froman unknown region at the input to a known region of the
sample at the output, the refractive index at the input canbe calculated as
nin ¼�n2out −
n2ambðy 0outÞ21þ ðy 0outÞ2
þ n2ambðy 0inÞ2
1þ ðy 0inÞ2�1
2
; (7)
where the refractive index at the output, nout ¼ nðyoutÞ, is aknown (or calculated) quantity and the slopes, y 0out and y 0in,are measured quantities. Differentiating nin with respect tothese quantities yields
∂nin∂nout
¼ nout�n2out −
n2ambðy 0outÞ21þ ðy 0outÞ2
þ n2ambðy 0inÞ2
1þ ðy 0inÞ2�−1
2
; (8)
∂nin∂ðy 0outÞ
¼�−
n2ambðy 0outÞ1þ 2ðy 0outÞ2 þ ðy 0outÞ4
�
×�n2out −
n2ambðy 0outÞ21þ ðy 0outÞ2
þ n2ambðy 0inÞ2
1þ ðy 0inÞ2�−1
2
; (9)
-1 -0.5 0 0.5 11.35
1.4
1.45
1.5
1.55
1.6
y (cm)
Ref
ract
ive
inde
x
KnownActualCalculated
-1 -0.5 0 0.5 10
0.2
0.4
0.6
0.8
1x 10
-4
y (cm)
xednievitc arfer
nirorreetulosb
A
(a) (b)
Fig. 11 (a) Index calculated from the ray displacement method using the iterative ray trace correction algorithm. The curves for actual and calcu-lated results cannot be discerned from this plot. (b) The resulting error due to quantization effects in the simulation. Simulation parameters areunchanged from Fig. 9.
-1 -0.5 0 0.5 11.35
1.4
1.45
1.5
1.55
1.6
y (cm)
Ref
ract
ive
inde
x
KnownActualCalculated
-1 -0.5 0 0.5 10
1
x 10-4
y (cm)
Abs
olut
e er
ror i
n re
fract
ive
inde
x
(a) (b)
Fig. 12 (a) Index calculated from the ray slope method using the bootstrap algorithm. The curves for actual and calculated results cannot bediscerned from this plot. (b) The resulting error due to quantization effects in the simulation. Simulation parameters are set to L ¼ 0.3 cm anda ¼ b ¼ 0.25 cm.
Optical Engineering 112108-6 November 2013/Vol. 52(11)
Lin et al.: One-dimensional gradient-index metrology based on ray slope measurements. . .
Downloaded From: http://opticalengineering.spiedigitallibrary.org/ on 02/24/2014 Terms of Use: http://spiedl.org/terms
∂nin∂ðy 0inÞ
¼�
n2ambðy 0inÞ1þ 2ðy 0inÞ2 þ ðy 0inÞ4
�
×�n2out −
n2ambðy 0outÞ21þ ðy 0outÞ2
þ n2ambðy 0inÞ2
1þ ðy 0inÞ2�−1
2
: (10)
The total error when calculating the index in the inputplane is therefore
dnin ¼∂nin∂nout
dnout þ∂nin
∂ðy 0outÞdðy 0outÞ þ
∂nin∂ðy 0inÞ
dðy 0inÞ: (11)
The geometry of the beam deflection measurement isillustrated in Fig. 13. The angles in Eq. (11) are obtainedby measuring the beam position in two observation planes.Computational error can result from uncertainty in the posi-tion measurements of the probe beam in the observationplanes as well as uncertainty in the positions of the observa-tion planes themselves.
Rewriting Eq. (11) in terms of the measured quantities a,b, ya, and yb, the total accumulated error bound is given by(see Appendix):
dnin ¼�−
∂nin∂nout
∂n∂y
�1þ a
b
�−
∂nin∂ðy 0outÞ
1
b
�dya
þ�∂nin∂nout
∂n∂y
abþ ∂nin
∂ðy 0outÞ1
b
�dyb
þ ∂nin∂nout
∂n∂y
ðy 0outÞda
þ�−
∂nin∂nout
∂n∂y
abðy 0outÞ −
∂nin∂ðy 0outÞ
1
bðy 0outÞ
�db
þþ ∂nin∂ðy 0inÞ
dðy 0inÞ þ∂nin∂nout
ðdninterp þ dn�inÞ; (12)
where dninterp is the interpolation error, dn�in accounts for theaccumulated error in the calculated index profile from pre-vious bootstraps as well as error in the measured input beamposition (see Appendix), and partial derivatives involvingnout, y 0in, and y
0out are given by Eqs. (8)–(10). By iteratively
applying Eq. (12) N times, where N is the minimum numberof bootstraps required to calculate the entire index profile ofthe sample, a bound on the accumulated error can be com-puted for the bootstrap algorithm. The error compounds witheach bootstrap in the algorithm. If j ∂nin∂nout j ¼ 1, the accumu-lated error bound will increase linearly with each bootstrap.From Eq. (8), this condition is satisfied when jy 0inj ¼ jy 0outj(always true in homogeneous samples). If jy 0inj < jy 0outj, it
is clear that j ∂nin∂nout j > 1 and the maximum accumulatederror increases exponentially per bootstrap. On the otherhand, if jy 0inj > jy 0outj, then j ∂nin∂nout j < 1 and the accumulatederror bound approaches an asymptote. One can take advan-tage of this particular type of buildup behavior in computa-tion error when measuring samples with a monotonic indexprofile.
While systematic errors result from uncertainty in propa-gation distances, a and b, uncertainty in position measure-ments, ya and yb, need to be treated as random processes.Using Eq. (12), the expected error resulting from these ran-dom variables in the two observation planes is given by
Δn2in;rms ¼���� − ∂nin∂nout
∂n∂y
�1þ a
b
�−
∂nin∂ðy 0outÞ
1
b
����2
Δy2a;rms
þ���� ∂nin∂nout
∂n∂y
abþ ∂nin
∂ðy 0outÞ1
b
����2
Δy2b;rms
þ���� ∂nin∂ðy 0inÞ
����2
Δðy 0inÞ2rms
þ���� ∂nin∂nout
∂n∂y
abþ ∂nin
∂ðy 0outÞ1
b
����2
Δy2b;rms
þ���� ∂nin∂ðy 0inÞ
����2
Δðy0inÞ2rms
þ���� ∂nin∂nout
����2
ðΔn2interp;rms þ Δn�2in;rmsÞ: (13)
To verify our error analysis, a forward ray trace is com-puted for a set of incident beams through a predeterminedGRIN profile. A constrained cubic spline fit is used to inter-polate between known (or calculated) index values.Therefore, noise from the interpolator is roughly fourth-order in the separation between output ray positions andcan be neglected if a sufficiently large number of rays areused. However, because the output ray positions and anglesare computed from a numerical ray trace and a discretizedindex profile, quantization noise must be considered. Thisnoise term replaces the interpolation noise term inEq. (12). For the purposes of verifying the error bound inEq. (12), the bound on quantization noise in the calculatedindex profile was characterized to be roughly 2 × 10−5
(before the error compounds) for the resolution used inthe simulation. Following the forward ray trace, positionmeasurements, ya and yb, in the observation planes are uni-formly shifted by 1 μm to introduce a systematic error. Asimilar perturbation can be achieved by changing propaga-tion distances a and b in Fig. 13 after beam deflection datahave been obtained. The accumulated error in the bootstrapalgorithm due to this systematic error in output beam posi-tions and angles is shown in Fig. 14(a). The results are ingood agreement with the error bound predicted by Eq. (12).The discrepancy at larger y-values is because Eq. (12)assumes the error in each bootstrap always reaches the pre-dicted error bound. This is only true for the first couplebootstraps in this particular simulation, as evident fromFig. 14(a). If the errors are random variations in positionmeasurements, ya and yb, the accumulated error in the boot-strap algorithm will typically resemble Fig. 14(b). Taking thestatistical average over a large number of realizations afterFig. 13 Deflectometry geometry in the ray slope method.
Optical Engineering 112108-7 November 2013/Vol. 52(11)
Lin et al.: One-dimensional gradient-index metrology based on ray slope measurements. . .
Downloaded From: http://opticalengineering.spiedigitallibrary.org/ on 02/24/2014 Terms of Use: http://spiedl.org/terms
adding normally distributed random noise with a standarddeviation of 1 μm to the position measurements, the expectederror conforms to Eq. (13), as shown in Fig. 14(c). The dis-crepancy arises because partial derivatives and the index gra-dient appearing in Eq. (13) are estimated in the bootstrapprocess when the index distribution is still unknown.Updating the accumulated error once per bootstrap in thealgorithm results in the apparent staircase behavior in allthree figures. In these simulations, multiple values of theindex are calculated per bootstrap.
Since no analytical expression exists for the error pro-duced by the iterative algorithm when there is uncertaintyin spatial measurements, its performance is analyzed by add-ing normally distributed random noise with a standarddeviation of 1 μm to the displacement data generated froma forward ray trace. A large number of simulations are aver-aged (RMS) to quantify the effect of these random errors. Inaddition, systematic errors are simulated by adding a con-stant 1-μm shift to all displacement data. The results ofthe analysis are shown in Fig. 15. Because beam displace-ment is a direct measure of the index gradient in the ray posi-tion method, error buildup due to systematic errors isexpected to increase linearly with distance from the initiallyknown region of the sample.
Compared to the ray slope method where ray displace-ment is measured in two planes to obtain slope data, the com-putation error is smaller in the ray position method due to a
simpler measurement geometry. However, the numericalintegration involved in computing the index distributionmakes the displacement method more sensitive to the num-ber of beams used in measuring the sample (since individualmeasurements correspond to the index gradient in the vicin-ity of the beam path), as well as the parameterization of the
-1 -0.5 0 0.5 10
1
2
3
4
5x 10
-3
y (cm)
Abs
olut
e er
ror
in r
efra
ctiv
e in
dex Simulated error
Expected error
-1 -0.5 0 0.5 10
0.5
1
1.5x 10
-3
y (cm)
xedni
evitca r fer
niro rreet
ulos
bA
Simulated errorExpected error
-1 -0.5 0 0.5 10
1
2
3
4
5
6
7
8x 10
-4
y (cm)
Err
or in
refra
ctiv
e in
dex
Statistical averageExpected error
(a) (b)
(c)
Fig. 14 (a) Accumulated error in the calculated index due to systematic errors in a single simulation. (b) Effect of random measurement errors in asingle simulation. (c) The accumulated error due to random measurement errors is averaged (root mean squared [RMS]) over a large number ofrealizations (simulations) to determine the expected error. Simulation parameters are unchanged from Fig. 12.
-1 -0.5 0 0.5 10
1
2
3
4
5
6
7
8x 10
-4
y (cm)
Abs
olut
e er
ror
in r
efra
ctiv
e in
dex
Systematic errorRMS randomMaximum random
Fig. 15 Refractive index error in the ray trace correction algorithm dueto systematic errors and random errors in simulated beam displace-ment data. Random errors are averaged (RMS) over a large numberof realizations (simulations) to calculate the expected error.Simulation parameters are unchanged from Fig. 9.
Optical Engineering 112108-8 November 2013/Vol. 52(11)
Lin et al.: One-dimensional gradient-index metrology based on ray slope measurements. . .
Downloaded From: http://opticalengineering.spiedigitallibrary.org/ on 02/24/2014 Terms of Use: http://spiedl.org/terms
index profile for optimization. This also leads to errorbuildup in the calculated index at locations far from the ini-tially known region of the sample. In contrast, the ray slopemethod is more robust in this regard; the error due to sparsedata points only depends on the quality of the interpolatorused in the bootstrap algorithm.
Redundancy in measured data provides one method ofreducing error buildup in both methods. As currently pre-sented, both methods use a known index value at one endof the sample as a starting point. With uncertainties in spatialmeasurements, index values calculated farther away from theknown region generally contain more error. If the refractiveindex is known at both ends of the sample (or, in general, atmultiple sample positions), the computation in both algo-rithms can be repeated, without any additional measure-ments, starting at these known points. Consistency amongthe index distributions obtained from different starting loca-tions can be enforced to improve accuracy and mitigate errorbuildup in both algorithms.
Finally, it is worth mentioning that measurements fromthe ray slope method provide enough information to engagethe previously described iterative ray trace algorithm afterobtaining an initial index distribution via the bootstrap algo-rithm. However, much of the correction made in the ray tracealgorithm comes from intrinsic modeling errors of the raydisplacement method. Without measurement errors, theray trace algorithm would work primarily to increase theinterpolation accuracy of the bootstrap algorithm. If uncer-tainties are present in the measurements, combining the twoalgorithms would not necessarily lead to an improvement inthe calculated index distribution, as the errors generated bythe algorithms accumulate differently.
8 ConclusionWe have presented a new method for measuring 1-D indexprofiles using angular ray deflection measurements and com-pared it to an existing technique using ray position measure-ments. The new method uses a fundamental relation betweeninput and output beam angles that follows directly from theray equation in geometric optics and contains no approxima-tions (apart from those necessary for neglecting diffraction).A bootstrap algorithm was introduced to compute the indexdistribution based on ray angle (and position) measurements.The accuracy of the existing ray position method wasenhanced significantly by utilizing an iterative ray trace algo-rithm to correct for intrinsic errors incurred from using anapproximate beam displacement model. Both methodswere used to experimentally measure the index distributionof a 1-D GRIN sample. The results showed good agreement,with a maximum discrepancy of 1.5 × 10−3 in the calculatedindex between the two methods. In addition, we obtained ananalytical expression for estimating error buildup in the boot-strap algorithm applied to the ray angle approach and veri-fied the expression with a computer simulation. In a typicalsimulation, we expect the error buildup in the calculatedindex to be
where ∂n∂y is the gradient of the index profile at yout and theerror in the extrapolated output position of the beam is givenby
dyout ¼�1þ a
b
�dya −
abdyb − y 0outdaþ
aby 0outdb:
In the bootstrap algorithm, indices at the output are inter-polated from previously calculated values. If the index at theoutput does not reside in the initially known region of thesample and was obtained from Eq. (3), then the total errorin the calculated index at the output must account for inter-polation error as well as any computation error carried overfrom previous calculations.
dnout ¼∂n∂y
dyout þ dninterp þ dn�in;
where dninterp is the interpolation error and dn�in is the accu-mulated error in the GRIN profile from previous bootstrapswith an additional term that accounts for spatial measure-ment errors in the input plane.
dn�in ¼ dnin;prev −∂n∂y
dyin;prev:
Substituting the above expressions into Eq. (11) andrearranging yields the expression in Eq. (12). In Eq. (13),the accumulated RMS error appears in the form
Δn�2in;rms ¼ Δn2in;rms;prev þ���� ∂n∂y
����2
Δy2in;rms:
References
1. D. T. Moore, “Gradient-index optics: a review,” Appl. Opt. 19(7),1035–1038 (1980).
2. P. J. Sands, “Inhomogeneous lenses, V. Chromatic paraxial aberrationsof lenses with axial or cylindrical index distributions,” J. Opt. Soc. Am.61(11), 1495–1500 (1971).
3. C. Wang and D. L. Shealy, “Design of gradient-index lens systems forlaser beam reshaping,” Appl. Opt. 32(25), 4763–4769 (1993).
4. D. Lin and J. R. Leger, “Numerical gradient-index design for coherentmode conversion,” Adv. Opt. Technol. 1(3), 195–202 (2012).
5. A. J. Barnard and B. Ahlborn, “Measurement of refractive index gra-dients by deflection of a laser beam,” Am. J. Phys. 43(7), 573 (1975).
6. O. Wiener, “Darstellung gekrummter Lichtstrahlen und Verwerthungderselben zur Untersuchung von Diffusion und Warmeleitung,” Ann.Phys. Chem. 285(5), 105–149 (1893).
7. Z. Bodnar and F. Ratajczyk, “Some remarks concerning optical glassheterogeneity measurement with the help of the autocollimationmethod,” Appl. Opt. 4(3), 351–354 (1965).
8. D. T. Moore and D. P. Ryan, “Measurement of the optical properties ofgradient index materials,” J. Opt. Soc. Am. 68(9), 1157–1166 (1978).
9. D. W. Sweeney and C. M. Vest, “Reconstruction of three-dimensionalrefractive index fields from multidirectional interferometric data,”Appl. Opt. 12(11), 2649–2664 (1973).
10. L. V. Kovalskii and V. K. Polanskii, “Application of the prism methodfor investigating transparent media with a refractive index gradient,”Opt. Spectrosc. 20, 408–409 (1966).
11. M. Miller and V. Malisek, “Study of the distribution of refractive indexby the differential prism method,” Opt. Spectrosc. 25, 70–72 (1968).
12. G. Oster, M. Wasserman, and C. Zwerling, “Theoretical interpretationof moiré patterns,” J. Opt. Soc. Am. 54(2), 169–175 (1964).
13. Y. Nishijima and G. Oster, “Moiré patterns: their application to refrac-tive index and refractive index gradient measurements,” J. Opt. Soc. Am.54(1), 1–5 (1964).
14. J. Teichman, “Measurement of gradient index materials by beam deflec-tion, displacement, or mode conversion,” Opt. Eng. 52(11), in press(2013).
15. G. Beliakov and S. Buckley, “Reconstruction of the refractive index pro-file of planar waveguides using ray tracing analysis,” in OpticalNetworking: Technologies, Traffic Engineering and Management:Conf. Proc., pp. 384–387, COIN/ACOFT, Melbourne (2003).
Di Lin received his BS degree in electricalengineering from the University ofMinnesota in 2008. He is currently workingtoward his PhD degree in electrical engineer-ing at the University of Minnesota. His princi-pal research interests include lightpropagation in inhomogeneous materials,laser cavity design, and beam combining.
James R. Leger received his BS degree inapplied physics from the California Instituteof Technology, Pasadena, in 1974, and hisPhD degree in electrical engineering (appliedphysics) from the University of California,San Diego, in 1980. He worked for the 3MCompany until 1984, when he joined theMassachusetts Institute of TechnologyLincoln laboratory, Lexington, as a researchstaff member. In 1991, he joined the faculty atthe University of Minnesota, Minneapolis,
where he is currently the Cymer professor of electrical and computerengineering and the Taylor distinguished professor. His principalresearch interests include laser design, applications of diffraction,and advanced imaging systems. He is a fellow of the OpticalSociety of America, the International Society for Optical Engineers,and the Institute of Electrical and Electronics Engineers.
Mint Kunkel received his BA degree in phys-ics from Carleton College in 2012. He is aresearch assistant to Professor Leger andis currently working toward his PhD degreein electrical engineering at the University ofMinnesota. His main research interestsinclude laser cavity design and optical signalprocessing.
Peter McCarthy received his BS degree inoptics from the University of Rochester in2008. He is currently a PhD candidate atthe Institute of Optics, University ofRochester, working in the research groupof Professor Duncan Moore. His researchinterests include gradient-index metrologyand optical system design.
Optical Engineering 112108-10 November 2013/Vol. 52(11)
Lin et al.: One-dimensional gradient-index metrology based on ray slope measurements. . .
Downloaded From: http://opticalengineering.spiedigitallibrary.org/ on 02/24/2014 Terms of Use: http://spiedl.org/terms
http://dx.doi.org/10.1364/AO.19.001035http://dx.doi.org/10.1364/JOSA.61.001495http://dx.doi.org/10.1364/AO.32.004763http://dx.doi.org/10.1515/aot-2012-0011http://dx.doi.org/10.1119/1.9769http://dx.doi.org/10.1002/andp.18932850506http://dx.doi.org/10.1002/andp.18932850506http://dx.doi.org/10.1364/AO.4.000351http://dx.doi.org/10.1364/JOSA.68.001157http://dx.doi.org/10.1364/AO.12.002649http://dx.doi.org/10.1366/000370266774386605http://dx.doi.org/10.1364/JOSA.54.000169http://dx.doi.org/10.1364/JOSA.54.000001