Onboard Terminal Area Energy Management Path Planning using Flatness Approach
27
2 nd International ARA Days “10 Years after ARD”, October 21-23 2008, Arcachon, France. 1/27 Vincent Morio *, Franck Cazaurang*, Ali Zolghadri* and P. Vernis *Automatic Control Group IMS lab/University of Bordeaux France www.laps.u-bordeaux1.fr/aria Guidance and Control Department Astrium Space Transportation France www.astrium.eads.net
-
Upload
dr-vincent-morio -
Category
Technology
-
view
370 -
download
1
description
2nd International ARA Days "10 years after ARD", October 21-23, 2008, Arcachon, France
Transcript of Onboard Terminal Area Energy Management Path Planning using Flatness Approach

2nd International ARA Days “10 Years after ARD”, Octobe r 21-23 2008, Arcachon, France. 1/27
Vincent Morio *, Franck Cazaurang*, Ali Zolghadri* and P. Vernis ����
*Automatic Control GroupIMS lab/University of Bordeaux
Francewww.laps.u-bordeaux1.fr/aria
�Guidance and Control DepartmentAstrium Space Transportation
Francewww.astrium.eads.net

2nd International ARA Days “10 Years after ARD”, Octobe r 21-23 2008, Arcachon, France. 2/27
Outline
� Motivations
� Trajectory planning by flatness and collocation
� Optimal convexification
� Application to the TAEM phase
� Future works

2nd International ARA Days “10 Years after ARD”, Octobe r 21-23 2008, Arcachon, France. 3/27
Motivations
• SICVER Project: Innovative Strategies for Guidance and Control of Experimental Launch Vehicles
• Increasing spacecraft autonomy/decreasing the ground level intervention load.
• Onboard trajectory planning provides a greater flexibility:
� to account for off-nominal conditions,
� to recover the vehicle from faulty situations.

2nd International ARA Days “10 Years after ARD”, Octobe r 21-23 2008, Arcachon, France. 4/27
Trajectory planning by flatness and collocation
• Flatness concept can be used to map the system dynamics to a lower dimension space
Flatness does not preserve convexity of the initial OCP• Convexification of the OCP in the flat-output space
• Transformation of the convex OCP into a Nonlinear Programming Problem (NLP)
Optimization of deformable geometric shapes by a genetic algorithmThe optimal solution of the initial OCP may be located on a constraint boundary
Minimum number of optimization variables in the Optimal Control ProblemMinimum number of optimization variables in the Optimal Control Problem

2nd International ARA Days “10 Years after ARD”, Octobe r 21-23 2008, Arcachon, France. 5/27
Trajectory planning by flatness and collocation

2nd International ARA Days “10 Years after ARD”, Octobe r 21-23 2008, Arcachon, France. 6/27
( )( )
==
)(),()(
)(),()(
tutxhty
tutxftxɺ� Consider the following NL model:
where Φ, Ψx, Ψu are smooth functions, z(αααα)(t), z(ββββ)(t) represent respectively the α-th and β-th time derivatives of z(t).
Definition: The system is differentially flat iffthere exists a set of differentially independent variables, called flat outputs, such that:
( ) mz t ∈R( ),)(),...,(),(),()( )( tutututxtz αɺΦ=
( )( )
== −
)(),...,(),()(
)(),...,(),()()(
)1(
tztztztu
tztztztx
u
xβ
β
ψψ
ɺ
ɺsuch that
Equivalence between NL system trajectories and those of the trivial system (chain of pure integrators)
Trajectory planning by flatness and collocationDifferential flatness

2nd International ARA Days “10 Years after ARD”, Octobe r 21-23 2008, Arcachon, France. 7/27
� Consider the nonlinear model( ) ( ) ( )( ),x t f x t u t=ɺ ( ) ( ),n mt x t t u t∋ ∈ ∋ ∈ℝ ֏ ℝ ℝ ֏ ℝwhere
Trajectory planning by flatness and collocationOptimal Control Problem (OCP)
Trajectory planning by flatness and collocationOptimal Control Problem (OCP)
� We seek a trajectory of the system which minimizes the cost functional:
( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )( )0
0 0 0, , , ,ft
t f f f
t
J x u C x t u t C x t u t dt C x t u t= + +∫Subject to a set of initial, trajectory, and final constraints such that:
( ) ( ) ( )( )( ) ( )( ) ( )( ) ( )( ) ( )( )( ) ( )( )( ) ( )( )
0
0 0 0 0 0 0
0
0 0 0 0 0
0
, , ,
,
, ,
,
, ,
, , ,
,
f
t t t t f
f f f f f f
t t t f
f f f f f
x t f x t u t t t t
l A x t B u t u
l A x t B u t u t t t
l A x t B u t u
L c x t u t U
L c x t u t U t t t
L c x t u t U
= ∈
≤ + ≤
≤ + ≤ ∈
≤ + ≤
≤ ≤
≤ ≤ ∈
≤ ≤
ɺ

2nd International ARA Days “10 Years after ARD”, Octobe r 21-23 2008, Arcachon, France. 8/27
� Reduction of the number of variables required in the OCP: the optimization variables become the flat outputs of the NL system
� Integration-free optimization problem: system dynamics is intrinsically satisfied
Trajectory planning by flatness and collocationOCP in flat output space
� The equivalent OCP in the flat output space is given by:
( )( )( )( )( )( )( )( )( )
0 0 0 0
0
0 0 0 0
0
,
, ,
,
,
, ,
t t t f
f f f f
t t t f
f f f f
l A z t u
l A z t u t t t
l A z t u
L c z t U
L c z t U t t t
L c z t U
≤ ≤
≤ ≤ ∈
≤ ≤
≤ ≤
≤ ≤ ∈
≤ ≤
ɶ
ɶ
ɶ
ɶ
ɶ
ɶ
( )( ) ( )( ) ( )( ) ( )( )
0
0 0minft
t f fz t
t
J z G z t G z t dt G z t= + +∫subject to:

2nd International ARA Days “10 Years after ARD”, Octobe r 21-23 2008, Arcachon, France. 9/27
Optimal Convexification
� The convexification problem (nonlinear constrained optimization) is solved by using a genetic algorithm in order to get a global optimum for the superquadrics volume
� Development of a Matlab software library: OCEANS
Optimal Convexification by Evolutionary Algorithm aNd Superquadrics
� May be used either in a “flat” framework or for typical nonconvex optimization problems
� Objective: Inner approximation of nonlinear trajectory constraints and cost functional by smoothly deformable geometric shapes
Generalities
Results in a convex OCP in the flat output space

2nd International ARA Days “10 Years after ARD”, Octobe r 21-23 2008, Arcachon, France. 10/27
� Generalization in n dimensions of superellipsoids (Barr, 1981)
Necessity to introduce additional convexity-preserving geometric transformations in ndimensions
Drawbacks:• Limited number of attaignable shapes• Symetric shapes
Optimal ConvexificationSuperquadrics
Optimal ConvexificationSuperquadrics
Advantages:• Compactness of the representation• Explicit parameterization of the shape

2nd International ARA Days “10 Years after ARD”, Octobe r 21-23 2008, Arcachon, France. 11/27
� n-D trigonometric paramaterization
=
−=
=
=
−
−
=−
−
=
−
− ∏
∏
nia
nia
ia
x
ii
n
kkii
n
kki
i
i
ki
k
1
1
11
1
1
1
1
sin
1,...,2cossin
1cos
θ
θθ
θ
ε
εε
ε
[ ]1,...,2
2,
2
1,
−=
−∈
=−∈
nisi
isi
i
i
ππθ
ππθ
2, ≤∀ ii εConvex iff
� n-D angle-center parameterization
( )
( ) ( )( )
=
−=
=
=
−−
−
=−−
−
=
∏
∏
nir
nirr
ir
x
ii
n
kkkii
n
kkk
i
11
1
111
1
1
sin
1,...,2cossin
1cos
θθ
θθθθ
θθ
with
( )
( )
1
1 1
12 2 2
1 1
1 2
2 2 2
1 1
11
cos sin
12,..., 1
cos sin
i
i i
i
i i
i i
r si i
a a
r si i n
a a
ε
ε ε
ε
ε ε
θ
θ θ
θ
θ θ+ +
= =
+ = = −
+
Optimal ConvexificationSuperquadrics
Optimal ConvexificationSuperquadricsSuperquadrics
Optimal ConvexificationSuperquadrics

2nd International ARA Days “10 Years after ARD”, Octobe r 21-23 2008, Arcachon, France. 12/27
3-D trigonometric parameterization
Variation of the number of anomalies
3-D angle-center parameterization
Variation of the number of anomalies
Optimal ConvexificationSuperquadrics
Optimal ConvexificationSuperquadricsSuperquadrics
Optimal ConvexificationSuperquadrics
More efficient sampling of the superquadric surface

2nd International ARA Days “10 Years after ARD”, Octobe r 21-23 2008, Arcachon, France. 13/27
Optimal ConvexificationGeometric transformations� The geometric transformations must preserve the convexity of the superquadrics
� n-D rotation:
� n-D translation:
� n-D linear pinching:

2nd International ARA Days “10 Years after ARD”, Octobe r 21-23 2008, Arcachon, France. 14/27
SuperquadricsOptimal Convexification
Superquadrics� The set containing of the sizing parameters needed to obtain a positioned, oriented and bended superquadric shape is given by:
Ψ
( ){ }111211111 ,,,,,,,,,,,,,, −+− ΦΦ=Ψ nnnnnn vvddaa …………… εε
sma roundness rotation. translation pinching
� Inside-outside function defined recursively: ( ) ( ),, ,n n nF x xΨ = Λ Ψ
( )( )( )
, 1
, 1
, 1
n
n
n
F x
F x
F x
Ψ <
Ψ = Ψ >
0=pv in the pinching direction
: x lies inside the shape
( )
( ) ( )( )
1 1
1
2
1
2 2
1 2,2
1 21 2
2
, , 1
,
1 1
, ,
1
k
k
k
n
p pp p
kn k n k
kk p
p
x xx
v va x a x
a a
xx x
va x
a
ε ε
ε
εε
−
−
−−
Λ Ψ = + + +
Λ Ψ = Λ Ψ + +
with
Inside-outside function property:
: x lies on the surface: x lies outside the shape

2nd International ARA Days “10 Years after ARD”, Octobe r 21-23 2008, Arcachon, France. 15/27
� Volume of a superquadric shape with n-D transformations
� n-D radial Euclidean distance
Radial distance from a point to the surface of the superquadric shape
( )( )1
20 0. 1
n
nd x F xε −−
= − or also, ( )( )1
20. 1
n
s nd x F xε −
= −
SuperquadricsOptimal Convexification
Superquadrics
0=pv in the pinching direction
where , 1, , 1,1 Rs t s t s tO − −ϒ = ϒ ϒ with and revolving-door gray code ,0
ss Oϒ = 0, 1t
tϒ =
( ) ( ) ( )( )
/2 2 1 2 1
0, 2 sin cosx y x y
B x y dx y
πφ φ φ− − Γ Γ
= =Γ +∫ is the beta function
( ) 1
0e t xx t dt
∞ − −Γ = ∫ is the gamma function
( )( )1
1 1
, 11 11 1
12 , 1
2 2
nkCard Cn nn
n n i i p n m m i ik ji m
k iV a a v Bε ε ε
−− −
− −= == =
+ Ψ = ϒ + ∑ ∑∏ ∏

2nd International ARA Days “10 Years after ARD”, Octobe r 21-23 2008, Arcachon, France. 16/27
Optimal ConvexificationConvexification problem
Problem: Consider a superquadric shape S of order n, parameterized by the set of parameters .
The optimization problem then consists in finding the optimal parameterscorresponding to the largest superquadric shape Sopt contained inside a feasible domain (supposed to be nonconvex), such that:
( ), 1
, 1,...,nl ui i i
F x
x x x i n
Ψ ≤ ≤ ≤ =
Ψ*Ψ
( )max nVΨ
Ψɶ
( ) ( )1
nn nV VΨ = Ψɶwhere : normalized volume
subject to:
( ),nF xΨ : inside-outside function
Optimal Convexification

2nd International ARA Days “10 Years after ARD”, Octobe r 21-23 2008, Arcachon, France. 17/27
� Multi-population extended GA adapted to the convexification process
Optimal ConvexificationOptimization by Genetic Algorithm (GA)
Generate new
population
start stop
evaluation of offsprings
initialization
Optimal ConvexificationOptimization by Genetic Algorithm (GA)
yes
mutation
recombination
fitness assigmentselection
no
reinsertion
migration
competition
optim criteria OK? best individuals

2nd International ARA Days “10 Years after ARD”, Octobe r 21-23 2008, Arcachon, France. 18/27
� Initial population: • small convex shapes inside the nonconvex feasible
domain• Random drawing of superquadrics and geometric
transformations tuning parameters in order to cover the whole search space
• Near-uniform sampling of the superquadric surface• Evaluation of initial population individuals (inside-outside
function constraint violation + volume)
� Genetic operators:• Selection: modified tournament selection operator• Crossover: simulated binary crossover (SBX)• Mutation: parameter-based mutation• Migration: complete net topology
Optimal ConvexificationOptimization by Genetic Algorithm (GA)
Optimal ConvexificationOptimization by Genetic Algorithm (GA)
Optimal Convexification

2nd International ARA Days “10 Years after ARD”, Octobe r 21-23 2008, Arcachon, France. 19/27
� Assuming that some superquadrics have been found to satisfy the convexification sub-problem, the new optimal control problem can be written as:
� A convex cost functional can be found in the same way.
Optimal ConvexificationConvex Optimal Control Problem
( )( )( )( )( )
( )( )( )( )
0 0 0 0
0
0 0 0 0
*0
,
, ,
,
,
0 , 1, ,
t t t f
f f f f
n f
f f f f
l A z t u
l A z t u t t t
l A z t u
L c z t U
F z t t t t
L c z t U
≤ ≤
≤ ≤ ∈
≤ ≤
≤ ≤
≤ Ψ ≤ ∈
≤ ≤
ɶ
ɶ
ɶ
ɶ
ɶ
( )( ) ( )( ) ( )( ) ( )( )
0
0 0minft
t f fz t
t
J z G z t G z t dt G z t= + +∫subject to:
Inside-outside function

2nd International ARA Days “10 Years after ARD”, Octobe r 21-23 2008, Arcachon, France. 20/27
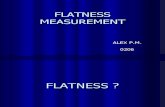
Runway
Yrunway
Xrunway
Orbiterground track
TEP
Earth Horizon
HAC radius
NEP
Hypersonic phase
Zrunway
TAEM phase
Autolandingphase
Injection point
Application to the TAEM phase

2nd International ARA Days “10 Years after ARD”, Octobe r 21-23 2008, Arcachon, France. 21/27
� Missions: insertion in low-Earth orbit of of payloads and crews� First flight: 04/12/1981� Number of flights till 01/01/2007: 119� Cost: from 300 to 400 millions $ (2006) � 3 operational vehicles until 2010 (Shuttle retirement)
Main features
Max. L/D (for M < 3) ≈4
Weight (beginning of TAEM) 90 T
Wingspan 23.8 m
Reference area 250 m2
Max. roll rate 5 deg/s
Max. pitch rate 2 deg/s
Application to the TAEM phaseShuttle Orbiter

2nd International ARA Days “10 Years after ARD”, Octobe r 21-23 2008, Arcachon, France. 22/27
Application to the TAEM phaseEquations of motion� Assumptions: symmetric flight (β=0), flat Earth coordinates, and free trajectory duration λ ( ) ( ) ( ). .
. 'd d
d dtλ
τ= =, 0 1
tτ τλ
= ≤ ≤ : normalized time
( )
( )
2
2
1,
21
,2
D
L
D SV C M
L SV C M
ρ α
ρ α
= =
where and 0ref
h
Heρ ρ − = : simple density model
Application to the TAEM phaseEquations of motion
� The 3dof point-mass equations can be rewritten with respect to normalized time such that:
co s cos
s in co s
s in
x V
y V
h V
λ χ γλ χ γλ γ
′ = ′ = ′ =
sin
coscos
sin
cos
DV g
m
L g
mV V
L
mV
λ γ
µγ λ γ
µχ λγ
′ = − −
′ = −
′ =
Position: Velocity:

2nd International ARA Days “10 Years after ARD”, Octobe r 21-23 2008, Arcachon, France. 23/27
� However, all the states and inputs of the 3dof model can be rewritten as functions of the flat outputs , their derivatives, and the variable λ:( )hyx ,,
Application to the TAEM phaseFlatness property of the guidance model� Since β=0, the 3dof model is under-actuated and so, the system is not flat
• Additional equation: ( )2 ,1sin 0
2DSV C MV
gm
ρ αγ
λ′+ + =
cosarctan
cosgV
χ γµ γγ λ
′
= ′ +
( )0
1 1
2 cos
sinCL
am
a f M SV a
χ γαρ λ µ′
= −• Inputs:
2 2 21 2 3z z z
Vλ
′ ′ ′+ +=
( ) ( )( )
2 23 1 2 3 1 1 2 2
2 2 2 2 21 2 3 1 2
z z z z z z z z
z z z z zγ
′′ ′ ′ ′ ′ ′′ ′ ′′+ − +′ =
′ ′ ′ ′ ′+ + +
2 1 2 1
2 21 2
z z z z
z zχ
′′ ′ ′ ′′−′ =′ ′+
3
2 21 2
arctanz
z zγ
′ = ′ ′+
2
1
arctanz
zχ
′=
′
1 1 2 2 3 3
2 2 21 2 3
z z z z z zV
z z zλ
′ ′′ ′ ′′ ′ ′′+ +′ =′ ′ ′+ +
• States:

2nd International ARA Days “10 Years after ARD”, Octobe r 21-23 2008, Arcachon, France. 24/27
� Example: dynamic pressure constraint along the TAEM trajectory, expressed with respect to flat outputs
3 2 2 21 2 3
0
1
2ref
z
H z z zQ e Sρ
λ
− ′ ′ ′+ +=
� Nonconvex constraint: exponentially contracting spherical shape
� Simple GA tuning parameters have yield good results
Application to the TAEM phaseConvexification of trajectory constraintsConvexification of trajectory constraints
Application to the TAEM phaseConvexification of trajectory constraintsConvexification of trajectory constraints
Application to the TAEM phaseConvexification of trajectory constraints
� Each TAEM constraint can be convexified by using the same process

2nd International ARA Days “10 Years after ARD”, Octobe r 21-23 2008, Arcachon, France. 25/27
Application to the TAEM phaseConvexification of trajectory constraints

2nd International ARA Days “10 Years after ARD”, Octobe r 21-23 2008, Arcachon, France. 26/27
� LPV guidance controller so as to ensure the same level of performances along each TAEM/A&L trajectory
� Robustness and performances of the onboard path planner must be assessed
� Design of a fault-tolerant onboard path planner to take into account potential single/multiple actuator faults occurring during the TAEM/A&L flight segments.
Future works

2nd International ARA Days “10 Years after ARD”, Octobe r 21-23 2008, Arcachon, France. 27/27
THANK YOU FOR YOUR ATTENTION !