On the Spacetime Geometry of Galilean Camerasyaser/SheikhGritaiShah_CVPR_2007.pdf · spacetime...
8
On the Spacetime Geometry of Galilean Cameras Yaser Sheikh Robotics Institute Carnegie Mellon University [email protected] Alexei Gritai Computer Vision Laboratory University of Central Florida [email protected] Mubarak Shah Computer Vision Laboratory University of Central Florida [email protected] Abstract In this paper, a projection model is presented for cam- eras moving at constant velocity (which we refer to as Galilean cameras). To that end, we introduce the concept of spacetime projection and show that perspective imag- ing and linear pushbroom imaging are specializations of the proposed model. The epipolar geometry between two such cameras is developed and we derive the Galilean fun- damental matrix. We show how six different “fundamental” matrices can be directly recovered from the Galilean fun- damental matrix including the classic fundamental matrix, the Linear Pushbroom (LP) fundamental matrix and a fun- damental matrix relating Epipolar Plane Images (EPIs). To estimate the parameters of this fundamental matrix and the mapping between videos in the case of planar scenes we describe linear algorithms and report experimental perfor- mance of these algorithms. 1. Introduction A camera is normally thought of as a device that gener- ates two dimensional images of a three dimensional world. This “projective engine” ([10]) takes a single snapshot of the world from a particular position at a particular time in- stant. The camera, however, is often dynamic and the out- put of cameras is better considered a video rather than an image. We reexamine the process of projection, not be- tween the static world and an image plane but instead where an uncalibrated camera is moving with (unknown) constant velocity. We refer to such a camera as a Galilean camera 1 and model the projection of the world onto the video hy- perplane. The epipolar geometry of a pair of static cam- eras has been exhaustively studied (more than two decades of research summarized by Hartley and Zisserman in [9], Faugeras and Luong in [10]), and we show that this concept can be generalized for Galilean cameras. 1 Paying homage to the observers in Galileo’s principle of relativity. Equation 4 further justifies this choice. Our work is related to that of Wolf and Shashua in [16], where they investigate higher-dimensional mappings be- tween k-spaces and 2-spaces that arise from different prob- lem instances for 3 ≤ k ≤ 6. However, where they provide six problem definitions describing various configurations of points moving in straight lines, we study the geometry of cameras moving with constant velocity. Bartoli in [1], Sturm in [15] and Han and Kanade in [7] all also make sim- ilar assumptions about objects moving along straight lines. In this paper, we describe a spacetime projection model for a Galilean camera and propose a mapping function be- tween the videos of two Galilean cameras when the scene is planar. We then present the epipolar geometry for this case and describe a normalized linear algorithm for esti- mating the parameters of the “fundamental” matrix relating Galilean cameras. We show how the original fundamental matrix, the LP fundamental matrix, the ortho-perspective fundamental matrix and three, as yet unknown, fundamental matrices can be directly recovered from this Galilean fun- damental matrix. The rest of this paper is organized as follows. In Sec- tion 2 we introduce the Galilean projection model used in the remainder of this paper, followed by Section 3 where we present the mapping between Galilean images when the scene is planar. A description of the relative geometry be- tween two Galilean cameras and the resulting fundamental matrix is presented in Section 4 and specializations of this matrix to several known and unknown fundamental matri- ces are described in Section 5. Finally, experimental valida- tion is presented in Section 7. 2. Galilean Projection Model We define a worldpoint as X =[TXYZ ] T ∈R 4 , on a world coordinate U =[T λX λY λZ λ] T and a video- point as x =[tuv] T ∈R 3 on a video coordinate system u =[t wu wv w] T ∈R 4 . Note that an additional time dimension has been added to the usual spatial terms. When the world and camera coordinate systems are aligned, the mapping describing central projection for the spatial coor- dinates and orthographic projection for the temporal coor- 1
Transcript of On the Spacetime Geometry of Galilean Camerasyaser/SheikhGritaiShah_CVPR_2007.pdf · spacetime...

On the Spacetime Geometry of Galilean Cameras
Yaser Sheikh
Robotics Institute
Carnegie Mellon University
Alexei Gritai
Computer Vision Laboratory
University of Central Florida
Mubarak Shah
Computer Vision Laboratory
University of Central Florida
Abstract
In this paper, a projection model is presented for cam-
eras moving at constant velocity (which we refer to as
Galilean cameras). To that end, we introduce the concept
of spacetime projection and show that perspective imag-
ing and linear pushbroom imaging are specializations of
the proposed model. The epipolar geometry between two
such cameras is developed and we derive the Galilean fun-
damental matrix. We show how six different “fundamental”
matrices can be directly recovered from the Galilean fun-
damental matrix including the classic fundamental matrix,
the Linear Pushbroom (LP) fundamental matrix and a fun-
damental matrix relating Epipolar Plane Images (EPIs). To
estimate the parameters of this fundamental matrix and the
mapping between videos in the case of planar scenes we
describe linear algorithms and report experimental perfor-
mance of these algorithms.
1. Introduction
A camera is normally thought of as a device that gener-
ates two dimensional images of a three dimensional world.
This “projective engine” ([10]) takes a single snapshot of
the world from a particular position at a particular time in-
stant. The camera, however, is often dynamic and the out-
put of cameras is better considered a video rather than an
image. We reexamine the process of projection, not be-
tween the static world and an image plane but instead where
an uncalibrated camera is moving with (unknown) constant
velocity. We refer to such a camera as a Galilean camera1
and model the projection of the world onto the video hy-
perplane. The epipolar geometry of a pair of static cam-
eras has been exhaustively studied (more than two decades
of research summarized by Hartley and Zisserman in [9],
Faugeras and Luong in [10]), and we show that this concept
can be generalized for Galilean cameras.
1Paying homage to the observers in Galileo’s principle of relativity.
Equation 4 further justifies this choice.
Our work is related to that of Wolf and Shashua in [16],
where they investigate higher-dimensional mappings be-
tween k-spaces and 2-spaces that arise from different prob-
lem instances for 3 ≤ k ≤ 6. However, where they provide
six problem definitions describing various configurations
of points moving in straight lines, we study the geometry
of cameras moving with constant velocity. Bartoli in [1],
Sturm in [15] and Han and Kanade in [7] all also make sim-
ilar assumptions about objects moving along straight lines.
In this paper, we describe a spacetime projection model
for a Galilean camera and propose a mapping function be-
tween the videos of two Galilean cameras when the scene
is planar. We then present the epipolar geometry for this
case and describe a normalized linear algorithm for esti-
mating the parameters of the “fundamental” matrix relating
Galilean cameras. We show how the original fundamental
matrix, the LP fundamental matrix, the ortho-perspective
fundamental matrix and three, as yet unknown, fundamental
matrices can be directly recovered from this Galilean fun-
damental matrix.
The rest of this paper is organized as follows. In Sec-
tion 2 we introduce the Galilean projection model used in
the remainder of this paper, followed by Section 3 where
we present the mapping between Galilean images when the
scene is planar. A description of the relative geometry be-
tween two Galilean cameras and the resulting fundamental
matrix is presented in Section 4 and specializations of this
matrix to several known and unknown fundamental matri-
ces are described in Section 5. Finally, experimental valida-
tion is presented in Section 7.
2. Galilean Projection Model
We define a worldpoint as X = [T X Y Z]T ∈ R4, on
a world coordinate U = [T λX λY λZ λ]T and a video-
point as x = [t u v]T ∈ R3 on a video coordinate system
u = [t wu wv w]T ∈ R4. Note that an additional time
dimension has been added to the usual spatial terms. When
the world and camera coordinate systems are aligned, the
mapping describing central projection for the spatial coor-
dinates and orthographic projection for the temporal coor-
1

dinate are,
(T, X, Y, Z)T 7→ (αtT, fX/Z + pu, fY/Z + pv)T (1)
where f is the focal length of the camera and αt is the re-
ciprocal of the frame-rate of the camera (causing an effect
akin to time dilation) and (pu, pv) are the coordinates of the
principal point. This can be expressed in matrix form as
TXYZ
7→
twuwvw
=
αt
f pu
f pv
1
TXYZ
,
(2)
or more concisely u = KX where K is the calibration ma-
trix. When the spatial world and camera coordinate systems
are not aligned they are related by rotation and translation.
The temporal coordinates are related by a translation (e.g.
the world time index when camera begins recording). These
transformations can be captured by a 4 × 4 orthogonal ma-
trix Q and a 4 × 5 displacement matrix D, where
Q =
1
R
,D =
1 −Dt
1 −Dx
1 −Dy
1 −Dz
,
(3)
where C = [Dt, Dx, Dy, Dz]T is the position of the cam-
era center and R is a 3 × 3 rotation matrix representing the
orientation of the camera coordinate system. The 4×5 pro-
jection matrix relates the world and video coordinate sys-
tems, u = PU. This projection matrix can be decomposed
as P = KQD = KQ[I|−C] or simply P = K[Q|−QC].
Now if the cameras are moving at constant velocity ac-
cording to ∆C = [1, ∆Dx, ∆Dy, ∆Dz]T , we have the fol-
lowing series if we consider only the spatial dimensions2,
u(0) = KR[I| − C]U
u(1) = KR[I| − (C + ∆C)]U
...
u(T ) = KR[I| − (C + T∆C)]U.
If we include the temporal dimension into the object vec-
tor we can rewrite these compactly as u = KQ[G| −C]U,where
G =
1 0 0 0−∆Dx 1 0 0−∆Dy 0 1 0−∆Dz 0 0 1
(4)
2Entities with a hat denote the spatial entries of the entity, e.g. U =[X, Y, Z, 1]T , Q = R etc.
v v'
u u'
t t'
Camera 1 Camera 2
X
Y
Z
T
u
v
t
videoline
trajectory
(a) (b)
Figure 1. Galilean Cameras.(a) Projection onto the video hyper-
plane (b) The videoline of a point charts out a curve in spacetime.
is a Galilean transformation. We refer to the 4 × 5 matrix
M = KQ[G| − C] (5)
as the Galilean projection matrix. As with the spatial pro-
jection matrix, the null vector of M corresponds to the
spacetime location of the camera center in the world at
t = 0. In addition, m12 = m13 = m14 = 0, where
M = {mij}. The video taken by a Galilean camera can
therefore be properly considered a three-dimensional im-
age projected from a four-dimensional world. It is a multi-
perspective (noncentral) camera in the sense described in
[14] and [13], the generator being a line in 4D spacetime.
Analogous to worldlines in spacetime geometry [3], we
refer to the curve charted out by successive world events
from a (spatially) static point as videolines. It was shown by
Bolles et al. in [2] that these curves are described hyperbolic
functions on EPIs, but in the video hyperplane (assuming
that the world reference frame is aligned with the camera
reference frame) they follow the parametric form,
u(T ) = pu +−f∆DxT + fX
−∆DzT + Z(6)
v(T ) = pv +−f∆DyT + fY
−∆DzT + Z(7)
t(T ) = αtT. (8)
It should be noted then that straight lines in the spacetime
world are not mapped to straight lines in the video hyper-
plane, except when the principal axis is orthogonal to the
velocity vector (in which case Dz = 0 and Z is constant
and therefore Equations 6 and 7 are linear). As a result,
spatial invariants such as the cross-ratio are not preserved
in spacetime.
3. Planar Geometry
In this section, we describe a transformation analogous
to the planar homography relating two images of a world
plane. By choosing two orthogonal basis vectors that span
the scene plane as the X and Y axes of the world coordinate

system and ignoring the perpendicular Z coordinate (since
all Z values will equal zero), we have,
u =
twuwvw
= M4
TXY1
,u′ =
t′
w′u′
w′v′
w′
= M′
4
TXY1
(9)
where M4
and M′
4are nonsingular 4 × 4 matrices, con-
structed by removing the fourth column from M and M′
respectively. There exists a transformation relating u and
u′, H = M′
4M−1
4where u′ = Hu. Considering time
independently we see that,
t = m11T + m14, t′ = m′
11T + m′
14,
t − m14
m11
=t′ − m′
14
m′11
= T,
from which we get the mapping t′ = h11t+h14, or in other
words, h12 = h13 = 0. As a result, we get the following
functions to determine t′, u′ and v′,
t′ =h11t + h14,
u′ =h21t + h22u + h23v + h24
h41t + h42x + h43y + h44
,
v′ =h31t + h32u + h33v + h34
h41t + h42x + h43y + h44
,
Thus, a nonsingular 4 × 4 matrix H relates the spacetime
coordinates of two videos captured by Galilean cameras
observing a planar scene.
Definition 3.1 (Planar Galilean Mapping) A planar
Galilean mapping is a linear transformation of u =[t u v 1]⊤, representable as a nonsingular 4 × 4 matrix H,
t′
w′u′
w′v′
w′
=
h11 0 0 h14
h21 h22 h23 h24
h31 h32 h33 h34
h41 h42 h43 h44
tuv1
. (10)
This matrix H is an inhomogeneous matrix that can be di-
vided into an inhomogeneous part, i.e. the first row, h1 and
a homogeneous part, i.e. the second, third and fourth rows,
h2,h3 and h4. Unlike the planar homography, this map-
ping does not form a group or in other words the product
of two planar Galilean mappings is not, in general, a planar
Galilean mapping.
To estimate the parameters of this mapping, the homo-
geneous and inhomogeneous parts can be computed sepa-
rately. The Direct Linear Transformation Algorithm (see
[9]) can be used to estimate the homogeneous part since,
x′
i
y′i
w′
i
×
u⊤i h2
u⊤
i h3
u⊤
i h4
= 0. (11)
An over-determined homogeneous system of equations can
be constructed as,
0⊤ −w′
iu⊤
i y′
iu⊤
i
w′
iu⊤
i 0⊤ −x′
iu⊤
i
−y′iu
⊤i x′
iu⊤i 0⊤
h2
h3
h4
= 0, (12)
and the solution can be found using SVD (see Section 4.1
in [9] for further details). For the inhomogeneous part, the
following linear system of equations can be solved using
least squares,
[ui]⊤[h11 h13]
⊤ = t′i. (13)
4. Two View Geometry
Consider a pair of Galilean cameras that move in dif-
ferent directions at different velocities3. The coordinates
of the corresponding projections in first and second camera
are u= (t, uw, vw, w)T and u′= (t′, u′w′, v′w′, w′)T re-
spectively. The imaged coordinates in the two cameras are
u = MU and u′ = M′U. This pair of equations may be
rewritten as
Ag = 0 (14)
where,
A =
m11 0 0 0 m15 − t 0 0m21 m22 m23 m24 m25 u 0m31 m32 m33 m34 m35 v 0m42 m42 m43 m44 m45 1 0m′
11 0 0 0 m′15 − t′ 0 0
m′21
m′22
m′23
m′24
m′25
0 u′
m′31
m′32
m′33
m′34
m′35
0 v′
m′41 m′
42 m′43 m′
44 m′45 0 1
,
(15)
mij are the elements of M and g =[T, X, Y, Z, 1,−w,−w′]T . Since A in the homoge-
neous system of Equation 14 is a 8× 7 matrix, it must have
a rank of at most six for a solution to exist. As a result, any
7 × 7 minor must have a zero determinant. There are eight
different ways to choose the 7 × 7 minor to solve the sys-
tem, but only two interesting variations. The first selection
uses both rows containing the temporal indices (t, t′) and
five rows containing the spatial indices (u, v, u′, v′) and
the second selection uses one row containing the temporal
indices and six rows containing the spatial indices. As in
[6], det(Ai) = 0 will produce the fundamental polynomial
that has interaction terms (between u, v, t, u′, v′ and t′ but
no squared terms. Hence, there are exists a 6 × 6 matrix
called the Galilean fundamental matrix,
(t′u′, t′v′, t′, u′, v′, 1)Γ(tu, tv, t, u, v, 1)T = 0. (16)
3By the principal of relativity we can assume one of the cameras to be
stationary, but to maintain a symmetric formulation between both cameras
we do not make that assumption here.

6
4
2
0
2
4
6 6
4
2
0
2
4
6
1.6
1.62
1.64
1.66
1.68
1.7
1.72
1.74
1.76
y-ax
is
x-axis
t-axis
Figure 2. Epipolar Surface. The videopoint in the second video
corresponding to a space-time point in the first video must lie on
this surface.
However, in all the eight variations (of different minors),
nine interaction terms do not exist all, i.e., out of a total of
36 possible interaction terms only 27 appear.
Definition 4.1 (Galilean Fundamental Matrix) If u and u′
are videopoints corresponding to the same worldline under
two Galilean cameras, there exists a 6×6 matrix Γ referred
to as the Galilean Fundamental Matrix such that,
t′u′
t′v′
t′
u′
v′
1
T
0 0 0 f1 f2 f3
0 0 0 f4 f5 f6
0 0 0 f7 f8 f9
f10 f11 f12 f13 f14 f15
f16 f17 f18 f19 f20 f21
f22 f23 f24 f25 f26 f27
tu
tv
t
u
v
1
= 0.
Γ can be written more compactly as,
Γ =
(
0 ∆F′
∆F F00
)
, (17)
where F00 is the fundamental matrix between the image in
the first video at time t = 0 and the image in the second
video at time t′ = 0, and (∆F, ∆F′) are matrices that
capture information about the velocity of each camera as
will be seen presently.
4.1. Epipolar Geometry
Unless there is zero motion, no epipoles (single image
points of the opposite camera center) in the usual sense ex-
ist. In general, epipolar lines (or curves) in the usual sense
do not exist either, instead there are epipolar surfaces in one
camera corresponding to a point in the other camera. These
surfaces are defined by setting a spatiotemporal point in one
camera, i.e. (t′, u′, v′) and applying the Galilean fundamen-
tal matrix. The surface is defined by the
s1tu + s2tv + s3t + s4u + s5v + s6 = 0
where s = [s1, . . . s6] is computed as
s = [t′u′, t′v′, t′, u′, v′, 1]Γ.
An example of this surface is plotted in Figure 2. It can
be seen that this surface is ruled, since the intersection with
each time plane is a line (corresponding to the classic epipo-
lar line of that image).
5. Specializations
The work by Feldman et al. in [5] on Crossed-Slits pro-
jection, considers the algebraic constraints between differ-
ent slices of the spacetime volume. We show that several
such specializations can be directly derived from the con-
straints described in this paper. The different specializations
are shown in Figure 3(a), (b) and (c) for the original fun-
damental matrix, the orthoperspective fundamental matrix
and the linear pushbroom fundamental matrix respectively.
Proceeding similarly it is straightforward to recover the fun-
damental matrices for the configurations in Figure 3(d), (e)
and (f).
5.1. Between Perspective Images
The classic fundamental matrix between two uncali-
brated perspective images was derived independently by
Faugeras in [10] and Hartley in [8]. For corresponding
points, this singular 3 × 3 matrix satisfies the constraint
[u′, v′, 1]F[u, v, 1]⊤ = 0. This matrix can be directly recov-
ered from the Galilean fundamental matrix. For the (t, t′)pair image we can recover the fundamental matrix Ftt′ by
partially collapsing Γ and plugging in the values of (t, t′).Thus Ftt′ =(
f1t′ + f10t + f13 f2t
′ + f11t + f14 f3t′ + f12t + f15
f4t′ + f16t + f19 f5t
′ + f17t + f20 f6t′ + f18t + f21
f7t′ + f22t + f25 f8t
′ + f23t + f26 f9t′ + f24t + f27
)
,
or simply
Ftt′ = ∆Ft + ∆F′t′ + F00. (18)
Thus, ∆F + F00 is the fundamental matrix between the
image in the first video at time t = 0 and the second video
at time t′ = 1 and ∆F′ + F00 is the fundamental matrix
between the image in the first video at time t = 1, and the
second video at time t′ = 0. We can infer the following
property from Equation 18.
Theorem 1. (Fundamental Boost Matrix) The matrices
(∆F, ∆F′) are rank-2 matrices. As a result, the rank of Γ
is at most 5.
Proof. At t = 0 and t′ = 0, a fundamental matrix F00 can
be decomposed into K′−T [−RC]×RK−1. At t = 1, if the
second camera is displaced by ∆C then the fundamental
matrix becomes,
K′−T [−R(C + ∆C)]×RK−1
= K′−T [−RC]×RK−1 − K′−T [R∆C]×RK−1.

(a) (b) (c)
(d) (e) (f)Figure 3. Specializations. “Fundamental” matrices can be recovered between (a) a pair of perspective images, (b) an EPI and a perspective
images, (c) a pair of EPIs, (d) a pair of LP images, (e) a LP and an EPI, (f) a LP and a perspective images
From Equation 18,
= F00 + ∆F
= F10.
Since [∆C]× is a skew-symmetric matrix, it follows that
∆F is a rank 2 matrix. The left 6×3 submatrix or the upper
3×6 submatrix of Γ are both therefore rank 2 matrices, and
Γ has a rank of at most 5. �
5.2. Between Linear Pushbroom Images
If the camera motion satisfies the conditions described
in [6], linear pushbroom images can be recovered from a
horizontal slice of the video volume. Between two such
images, the LP fundamental matrix was derived by Gupta
and Hartley in [6]. The relationship captured by this matrix
is expressed as (t′v′, t′, v′, 1)Fuu′(tv, t, v, 1)T = 0. This
4 × 4 matrix too can be directly derived from Γ. Thus,
given (u, u′), we can compute Fuu′ =
0 00 0
f17 f18 + f16u
f11u′ + f23 f22u + f24 + (f10u + f12)u
′
(19)
f5 f4u + f6
f2u′ + f8 f7u + f9 + (f1u + f3)u
′
f20 f19u + f21
f14u′ + f26 f25u + f27 + (f13u + f15)u
′
.
It can be observed that the structure of the matrix is the same
as the one derived in [6].
5.3. Between Epipolar Plane Images
Epipolar plane images were defined by Bolles et al. in
[2] as the collection of epipolar lines that correspond to one
epipolar plane in the world. We can recover the fundamental
matrix between two EPIs. In this case it has a form similar
to the LP fundamental matrix,
0 00 0
f10 f12 + f11v
f16v′ + f22 f23v + f24 + (f17v + f18)v
′
(20)
f1 f2v + f3
f2v′ + f7 f8v + f9 + (f5v + f6)v
′
f13 f14v + f15
f19v′ + f25 f26v + f27 + (f20v + f21)v
′
.
5.4. Between a Pushbroom and a Perspective Image
Recently in [11], Khan et al. derived the 4 × 3perspective-orthoperspective fundamental matrix between
a pushbroom image and a perspective image. The
relationship captured by this matrix is expressed as
(t′v′, t′, v′, 1)Fu′t(u, v, 1)T = 0. This matrix can also be
directly derived from Γ. Thus, given (t, u′), we can com-
pute Ftu′ =
f4 f5
f1u′ + f7 f2u
′ + f8
f16t + f19 f17t + f20
f10tu′ + f22t + f13u
′ + f25 f11tu′ + f23t + f14u
′ + f26
f6
f3u′ + f9
f18t + f21
f12tu′ + f24t + f15u
′ + f27
,
or simply
(
φ∆F′
φt∆F + F00
)
, where φ =
(
0 1 0u′ 0 1
)
.
Similarly, it is straightforward to recover Fvu′ the funda-
mental matrices between an EPI and an LP image, and Ftv′
between an EPI and a perspective image.
6. Normalized Linear Algorithm
A linear algorithm can used to estimate the parameters
of Γ. Equation 17 can be rewritten as the homogeneous
system Aγ = 0 where γ = [f1, · · · , f27]T is a 27-vector,
constructed from the non-zero elements of Γ and A is a

Objective
Given n ≥ 26 matches from corresponding videolines, estimate
the Galilean fundamental matrix Γ such that p′T Γp = 0.
Algorithm
1. Normalization: Normalize the coordinates through an ap-
propriate scaling and translation.
2. Linear Solution: Perform singular value decomposition on
A and determine Γ by selecting the singular vector corre-
sponding to the smallest singular value of A and reconstruct-
ing a 6 × 6 matrix.
3. Rank Constraint: Set the smallest singular value of Γ to
zero, enforce the rank 5 constraint.
4. Denormalization: Denormalize Γ according to the original
scaling and translation.
Figure 4. A linear algorithm for estimating Γ
matrix constructed from spatiotemporal coordinates of cor-
responding points. If noiseless points correspond exactly
to each other the rank of A is 26 and the null-vector of Acorresponds to an estimate of γ. In the presence measure-
ment noise, the 27th singular value will be non zero. In
that case, the singular vector corresponding to the smallest
singular value of A can be used as an estimate of γ. The
rank constraints on Γ can be enforced post facto by setting
the smallest singular values of Γ to zero and reconstructing
the matrix. Of course, as with other linear algorithms of this
sort, to obtain good estimates it is important to appropriately
normalize the data (see Section 4.4 of [9]). Lastly, to obtain
a meaningful solution, A has to have a rank of more than
26. It is emphasized that to ensure the rank of A is greater
than 17, correspondences from different videopoints of the
same worldpoint must be used. For instance, if videolines
of a static world point in the scene of length n are associated
in both cameras, there are n2 rows that should be added to
A.
7. Experimentation
An experiment was conducted where two cameras were
placed on a moving walkway 8 feet apart, looking at differ-
ent angles and moving at approximately 2 miles per hour in
the same direction. A pair of 1000 frame sequences were
recorded at a resolution of 240 × 360 by two SONY HDV
cameras (images were downsampled) and 22 videopoints
were tracked across 6 frames in each of the two videos
(frames 971 to 976 in both sequences). The motion of
the cameras was not perpendicular to the optical axis of
either camera. At 30 fps, the distance traversed by both
cameras during this period was about 98 feet, and the dis-
tance traveled in between successive frames was approxi-
mately 1.2 inches. Three slices of this video are shown in
t- coordinate
v- c
oo
rdin
ate
e
200 400 600 800 1000 1200 1400 1600 1800 2000
100
200
300
400
500
600
700
t -coordinate
u -c
oord
inate
200 400 600 800 1000 1200 1400 1600 1800 2000
50
100
150
200
250
300
350
400
450
v -coordinate
u- c
oo
rdin
ate
100 200 300 400 500 600 700
50
100
150
200
250
300
350
400
450
Figure 5. Three slices of a video taken from a Galilean camera.
Figure 5 (the results in this paper are best seen in color).
These points were used to estimate the Galilean Fundamen-
tal matrix using the linear algorithm presented in this pa-
per. To evaluate this estimate, different time slices of the
video were analyzed using the different specializations of
the Galilean Fundamental matrix. A set of 6 points (differ-
ent from the ones used during computation) were selected
in both frames and the points and the epipolar lines of their
correspondences between two perspective images are plot-
ted in Figure 7. Despite the fact that the videopoints corre-
spondences were taken towards the end of the sequence and
the frames in this figure were taken towards the beginning
(frame 1 from video 1 and frame 20 from video 2) the fun-
damental matrix recovered is accurate. This demonstrates
that Γ may be used to predicting fundamental matrices in
the future without having point correspondences for those
frames. The epipolar curves induced by points in frames
960, 980 and 1000 onto the pushbroom image in video 1
generated from column 250 are shown in Figure 8. As the
corresponding frames move, the asymptote translates in the
LP image translates too. Figure 7 shows frame 980 with
the points used to plot the curves in Figures 8 and 7. The
corresponding epipolar lines from the EPI are missing since
it is difficult to find point correspondences on EPIs. Nine
points lay on a plane and were used to compute the planar
Galilean mapping shown in Figure 6. The figure shows the
first sequence where the yellow boxes show the positions of
the nine points in that sequence and the black points indi-
cate the positions of the points in Sequence 2 (a) before and
(b) after warping.
8. Discussion
In this work, we present a spacetime projection model for
cameras moving at constant velocities. In practice, the as-
sumption of constant velocity is often reasonable for short
durations of time, especially when the camera is mounted
on a robot, elevator or on a vehicle such as an aircraft, train,
car or a spacecraft. An important application for the ideas
described in this paper is for prediction of relative camera

−8 −7 −6 −5 −4 −3
10
20
30
40
50
60
70
u
Sequence 1 (Perspective−Perspective)v
−14 −12 −10 −8 −6 −4 −2 0 2 4
6.3
6.4
6.5
6.6
6.7
6.8
6.9
7
7.1
7.2
u
Sequence 1 (EPI−EPI)
t
20 22 24 26 28 30 32 34 36 38
6.3
6.4
6.5
6.6
6.7
6.8
6.9
7
7.1
7.2
v
Sequence 1 (Pushbroom−Pushbroom)
t
−14 −12 −10 −8 −6 −4 −2 0 2 4
6.3
6.4
6.5
6.6
6.7
6.8
6.9
7
7.1
7.2
u
Sequence 1 (EPI−Pushbroom)
t
−14 −12 −10 −8 −6 −4 −2 0 2 4
6.3
6.4
6.5
6.6
6.7
6.8
6.9
7
7.1
7.2
u
Sequence 1 (EPI−Perspective)
t
20 22 24 26 28 30 32 34 36 38
6.3
6.4
6.5
6.6
6.7
6.8
6.9
7
7.1
7.2
v
Sequence 1 (Pushbroom−Perspective)
t
4 5 6 7 8 9
−80
−60
−40
−20
0
20
40
60
u
Sequence 2 (Perspective−Perspective)
v
−2 0 2 4 6 8 10 12 14 16
1.5
1.55
1.6
1.65
1.7
1.75
1.8
1.85
1.9
1.95
u
Sequence 2 (EPI−EPI)
t
−26 −24 −22 −20 −18 −16 −14 −12 −10 −8
1.7
1.71
1.72
1.73
1.74
1.75
v
Sequence 2 (Pushbroom−Pushbroom)
t
−26 −24 −22 −20 −18 −16 −14 −12 −10 −8
1.7
1.71
1.72
1.73
1.74
1.75
v
Sequence 2 (EPI−Pushbroom)
t
−15 −10 −5 0 5
−600
−500
−400
−300
−200
−100
0
100
200
300
400
u
Sequence 2 (EPI−Perspective)
v
−15 −10 −5 0 5
−600
−500
−400
−300
−200
−100
0
100
200
300
400
u
Sequence 2 (Pushbroom−Perspective)
v
(a) (b) (c) (d) (e) (f)
Figure 11. Corresponding points and their epipolar curves. (a) Between two perspective images (b) Between two LP images (c) Between
two EPIs (d) Between a LP image and an EPI (e) Between a LP image and a perspective (f) Between an EPI and a perspective.
(a) (b)
Figure 6. Videopoints mapped using the planar Galilean mapping.
Yellow squares indicate the position of the points in Sequence 1,
black points indicate the position of (a) corresponding points in
Sequence 2 and (b) corresponding points after warping.
50 100 150 200 250 300 350
20
40
60
80
100
120
140
160
180
200
220
24050 100 150 200 250 300 350
20
40
60
80
100
120
140
160
180
200
220
240
Figure 7. Recovering the fundamental matrix between frame 1 in
sequence 1 and frame 20 in sequence 2 from the Galilean funda-
mental matrix. The Galilean fundamental matrix was computed
from videopoints in six frames (971 to 976 in both sequences).
position. When cameras move, the degree of overlap be-
tween their fields of view usually changes and when the
fields of view become disjoint, estimation of relative cam-
era position becomes impossible. However, if the motion of
the cameras follow some structured motion (like constant
velocity) the ideas presented here can be used to predict the
fundamental matrix relating views even when their fields of
view are disjoint. We investigate the relative geometry re-
lating a pair of such cameras in planar and general scenes.
We show how three known fundamental matrices are spe-
cializations of this matrix and could be readily recovered
from the proposed fundamental matrix, providing a unify-
100 200 300 400 500 600 700 800 900 1000
50
100
150
200
100 200 300 400 500 600 700 800 900 1000
50
100
150
200
100 200 300 400 500 600 700 800 900 1000
50
100
150
200
Figure 8. The epipolar curves induced by frames 960, 980 and
1000 of camera 2 on the pushbroom images of camera 1 corre-
sponding to column 250.
ing link between the classic fundamental matrix and the LP
fundamental matrix. In addition we describe three new fun-
damental matrices that can also be recovered. In the future,
we intend to investigate the application of different motion
models, such as a constant acceleration model, and study
the relationships between three or more Galilean cameras.
Acknowledgements
The authors thank Takeo Kanade for his useful com-
ments and suggestions. This work was funded by the
Disruptive Technologies Office, Video Analysis and Con-
tent Extraction (VACE) Program - Phase III, Contract No.
NBCHC060105 issued by the Department of the Interior.
The view and conclusions are those of the authors, not of
the US Government or its agencies.
100 200 300 400 500 600 700 800 900 1000
50
100
150
200
250
300
350
100 200 300 400 500 600 700 800 900 1000
50
100
150
200
250
300
350
100 200 300 400 500 600 700 800 900 1000
50
100
150
200
250
300
350
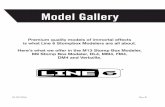
Figure 9. The epipolar curves induced by frames 960, 980 and
1000 of camera 2 on the EPIs of camera 1 corresponding to row
100.
50 100 150 200 250 300 350
20
40
60
80
100
120
140
160
180
200
220
24050 100 150 200 250 300 350
50
100
150
200
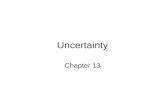
(a) (b)Figure 10. Frame 980 with the points inducing the epipolar curves
in (a) Figure 8 and (b) Figure 7.
References
[1] A. Bartoli, “The Geometry of Dynamic Scnes - On Copla-
nar and Convergent Linear Motions Embedded in 3D Static
Scenes”, Computer Vision and Image Understanding, 2003.
[2] R. Bolles, H. Baker and D. Marimont, “Epipolar-plane Im-
age Analysis: An Approach to Determining Structure from
Motion”, International Journal of Computer Vision, 1987.
[3] J. Callahan, “The Geometry of Spacetime”, Springer-Verlag,
2000.
[4] O. Faugeras, “What can be seen in three dimensions with an
uncalibrated stereo rig?”, European Conference on Computer
Vision, 1992.
[5] D. Feldman, T. Pajdla and D. Weinshall, “On the Epipolar Ge-
ometry of the Crossed-Slits Projection”, IEEE International
Conference on Computer Vision, 2003.
[6] R. Gupta and R. Hartley, “Linear Pushbroom Cameras”, IEEE
Transactions on Pattern Analysis and Machine Intelligence,
1997.
[7] M. Han and T. Kanade, “Reconstruction of a scene with multi-
ple linearly moving objects”, IEEE International Conference
on Computer Vision and Pattern Recognition, 2000.
[8] R. Hartley, “Estimation of Relative Camera Positions for Un-
calibrated Cameras”, European Conference on Computer Vi-
sion, 1992.
[9] R. Hartley and A. Zisserman, “Multiple View Geometry in
Computer Vision”, Cambridge University Press, 2000.
[10] O. Faugeras and Q.-T. Luong,“The Geometry of Multiple
Images”, MIT Press, 2001.
[11] S. Khan, F. Rafi and M. Shah, “Where was the Picture Taken:
Image Localization in Route Panoramas using Epipolar Ge-
ometry”, International Conference on Multimedia and Expo,
2006.
[12] H. Longuet-Higgins, “A Computer Algorithm for Recon-
structing a Scene From Two Projections,” Nature, 1981.
[13] T. Pajdla, ‘Stereo with Oblique Cameras‘,” International
Journal of Computer Vision, 2002.
[14] S. Seitz, “The Space of All Stereo Images”, Proceedings
of the IEEE International Conference on Computer Vision,
2001.
[15] P. Sturm, “Structure and Motion for Dynamic Scenes - the
case of points moving in planes”, European Conference on
Computer Vision, 2002.
[16] L. Wolf and A. Shashua, “On Projection Matrices Pk →
P2, k = 3, . . . , 6, and their Application in Computer Vision”,
International Journal of Computer Vision, 2002.
[17] Z. Zhang, “Determining the Epipolar Geometry and its Un-
certainty: A Review”, International Journal of Computer Vi-
sion,1998.