On Approaches in Mathematical Optimization with...
35
J. Brust, R. Marcia Introduction Subproblem Solver Shape-Changing Parameter Inference Nonlinear Eigenvalues Summary and Conclusion References 1/37 On Approaches in Mathematical Optimization with Eigenvalues Johannes Brust SDSC, California, USA August 11, 2016
Transcript of On Approaches in Mathematical Optimization with...

J. Brust, R. Marcia
Introduction
Subproblem Solver
Shape-Changing
ParameterInference
NonlinearEigenvalues
Summary andConclusion
References
1/37
On Approaches in MathematicalOptimization with Eigenvalues
Johannes Brust
SDSC, California, USA
August 11, 2016

J. Brust, R. Marcia
Introduction
Subproblem Solver
Shape-Changing
ParameterInference
NonlinearEigenvalues
Summary andConclusion
References
2/37
Outline
Introduction
Subproblem Solver
Shape-Changing
Parameter Inference
Nonlinear Eigenvalues
Summary and Conclusion
References

J. Brust, R. Marcia
Introduction
Subproblem Solver
Shape-Changing
ParameterInference
NonlinearEigenvalues
Summary andConclusion
References
3/37
Problem Formulation
We are solving the minimization problem
minimizex∈Rn
f (x),
where f : Rn → R, using a Trust-Region algorithm.
Assumptions:I The 2nd derivative is difficult to compute,I Large n.

J. Brust, R. Marcia
Introduction
Subproblem Solver
Shape-Changing
ParameterInference
NonlinearEigenvalues
Summary andConclusion
References
4/37
About Us
Our team is Prof. R. Marcia, Prof. J. Erway and me:
(R.M.) (J.E.)

J. Brust, R. Marcia
Introduction
Subproblem Solver
Shape-Changing
ParameterInference
NonlinearEigenvalues
Summary andConclusion
References
5/37
Notation
I A bold lower letter will be a vector : x.I A bold upper letter will be a matrix : X.I k represents an iteration index.I n represents the problem dimension.I ‖(.)‖2 represents the Euclidean norm :
‖x‖2 =√∑n
i=1 x2i .
I ∇ represents the 1st derivative:[∂∂x1
∂∂x2
· · ·]T
.
I ∇2 represents 2nd derivative:
∂2
∂2x1
∂2
∂x1∂x2· · ·
∂2
∂x2∂x1
∂2
∂2x2...
. . .
.

J. Brust, R. Marcia
Introduction
Subproblem Solver
Shape-Changing
ParameterInference
NonlinearEigenvalues
Summary andConclusion
References
6/37
Iterative Methods
To solve the minimization, repeatedly try
xk+1 = xk + sk,
where sk is a step. The step satisfies
f (xk+1) ≈ Q (sk) ,
where Q (sk) is a quadratic approximation.
Two Methods:(1) Line-search Newton,(2) Trust-Region.

J. Brust, R. Marcia
Introduction
Subproblem Solver
Shape-Changing
ParameterInference
NonlinearEigenvalues
Summary andConclusion
References
7/37
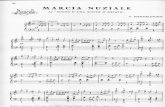
The Trust-Region Method
Case: f (xk+1) = Q (sk)
-6 -4 -2 0 2 4 6-6
-4
-2
0
2
4
6
Newton step
Global minimum
Local minimum
s⇤
The Trust-Region method is applicable with saddle-points.

J. Brust, R. Marcia
Introduction
Subproblem Solver
Shape-Changing
ParameterInference
NonlinearEigenvalues
Summary andConclusion
References
8/37
Trust-Region Method
For k = 1, 2, . . .
(1) Solve the trust-region subproblem to obtain sk:
minimize||s||≤∆k
Q(s) =
{sTgk +
12
sTBks}.
(2) Set xk+1 = xk + sk.(3) Update ∆k (trust-region radius).(4) Update Bk, gk, xk.
Here
gk = ∇f (xk), Bk ≈ ∇2f (xk), and ∆k > 0.

J. Brust, R. Marcia
Introduction
Subproblem Solver
Shape-Changing
ParameterInference
NonlinearEigenvalues
Summary andConclusion
References
9/37
The Subproblem Solution
The subproblem solution is either interior or at theboundary:
(a): Interior (b): Boundary

J. Brust, R. Marcia
Introduction
Subproblem Solver
Shape-Changing
ParameterInference
NonlinearEigenvalues
Summary andConclusion
References
10/37
Subproblem Optimality Conditions
Moré and Sorensen (1983): For some σ∗ ∈ R, thesolution s∗ of the Trust-Region subproblem satisfies
(Bk + σ∗In)s∗ = −gk,
σ∗ · (‖s∗‖2 −∆k) = 0,
‖s∗‖2 ≤ ∆k,
σ∗ ≥ 0,
Bk + σ∗In � 0.
In the remainder we drop the iteration index k.

J. Brust, R. Marcia
Introduction
Subproblem Solver
Shape-Changing
ParameterInference
NonlinearEigenvalues
Summary andConclusion
References
11/37
Subproblem Solver.

J. Brust, R. Marcia
Introduction
Subproblem Solver
Shape-Changing
ParameterInference
NonlinearEigenvalues
Summary andConclusion
References
12/37
Methodology
Orthonormal Basis subproblem solver (OBS):
(1) Eigendecompose B,
(2) Transform subproblem by change of variables,
(3) Solve transformed optimality conditions,
(4) Change variables back.

J. Brust, R. Marcia
Introduction
Subproblem Solver
Shape-Changing
ParameterInference
NonlinearEigenvalues
Summary andConclusion
References
13/37
Eigendecomposition of B
The compact quasi-Newton matrix has structure
B = γIn +
V
n×m
[W]m×m
[VT ]m×n
,
where m� n, γ ∈ R and V,W depend on the method.
Then the eigendecomposition
B = γIn + VWVT = P[
Λ̂γIn−m
]︸ ︷︷ ︸
≡Λ
PT ,
where P =[P‖ P⊥
]orthogonal eigenvectors, λ1 is the
smallest eigenvalue.

J. Brust, R. Marcia
Introduction
Subproblem Solver
Shape-Changing
ParameterInference
NonlinearEigenvalues
Summary andConclusion
References
14/37
Subproblem Optimality
For the first subproblem optimality condition we have
−g = (B + σI)s= (PΛPT + σI)s= (PΛPT + σPPT)s= P(Λ + σI)PTs= P(Λ + σI)v,
where PTs = v. Then
−PTg = (Λ + σI)v.
For the second condition, since P is orthogonal and sinces = Pv,
||s||2 = ||Pv||2 = ||v||2.

J. Brust, R. Marcia
Introduction
Subproblem Solver
Shape-Changing
ParameterInference
NonlinearEigenvalues
Summary andConclusion
References
15/37
Subproblem Optimality
Now the subproblem optimality conditions can beexpressed equivalently in terms of (s∗, σ∗) or (v∗, σ∗):
(B + σ∗I)s∗ = −g (Λ + σ∗I)v∗ = −PTgσ∗(‖s∗‖2 −∆) = 0 σ∗(‖v∗‖2 −∆) = 0
‖s∗‖2 ≤ ∆ ‖v∗‖2 ≤ ∆
σ∗ ≥ 0 σ∗ ≥ 0
B + σ∗I ≥ 0 λi + σ∗ ≥ 0 for all i.
The optimality conditions on the right have a simplifiedform, mainly because Λ + σ∗I is a diagonal matrix.

J. Brust, R. Marcia
Introduction
Subproblem Solver
Shape-Changing
ParameterInference
NonlinearEigenvalues
Summary andConclusion
References
16/37
Solving the Optimality Conditions
Interior Solution: If λ1 > 0, try σ∗ = 0 so that
v∗ = − (Λ)−1 (PTg).
If ‖v∗‖2 =∥∥Λ−1
(PTg
)∥∥2 < ∆, then the solution is found.
Boundary Solution: For σ∗ > 0 set
v∗ = − (Λ + σ∗I)−1 (PTg),
where σ∗ is the scalar that satisfies
‖v∗‖2 =∥∥∥(Λ + σ∗I)−1 (PTg
)∥∥∥2
= ∆, σ∗ + λ1 ≥ 0.

J. Brust, R. Marcia
Introduction
Subproblem Solver
Shape-Changing
ParameterInference
NonlinearEigenvalues
Summary andConclusion
References
17/37
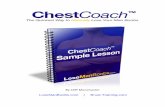
Root solving
We use Newton’s method to solve the equation
φ (σ∗) ≡ 1∥∥∥(Λ + σ∗I)−1 (PTg)∥∥∥
2
− 1∆
= 0.
−1 0 1 2 3 4 5−0.4
−0.3
−0.2
−0.1
0
0.1
σ
φ(σ)
−λ1=−λmin−λ2 σ∗

J. Brust, R. Marcia
Introduction
Subproblem Solver
Shape-Changing
ParameterInference
NonlinearEigenvalues
Summary andConclusion
References
18/37
Back Transformation
Since v = PTs, then we compute
s∗ = Pv∗
for numerical tests:
Criteria:I 1st Optimality condition: (B + σ∗I)s∗ = −g.I Boundary solution: φ(σ∗) ≡ 1
‖s∗‖2− 1
∆ = 0.I Curvature condition: λ1 + σ∗ ≥ 0.
Parameters:I Convergence tolerance: ε = 1.0× 10−10.I m = 5.I 103 ≤ n ≤ 107.I Randomly generated B.

J. Brust, R. Marcia
Introduction
Subproblem Solver
Shape-Changing
ParameterInference
NonlinearEigenvalues
Summary andConclusion
References
19/37
Results of Numerical Experiments: Boundary Solution
Let opt 1 = ||(B + σ∗I)s∗ + g||2.
n opt 1 λ1 + σ∗ |φ(σ∗)| Time103 3.727e-15 5.608e+00 2.775e-17 7.688e-04104 1.145e-14 2.608e+01 2.220e-16 1.343e-03105 3.792e-14 2.626e+01 3.330e-16 8.755e-03106 1.108e-13 1.166e+01 1.873e-16 8.486e-02107 4.001e-13 1.102e+01 8.716e-17 8.723e-01
Note that
I ||(B + σ∗I)s∗ + g||2 ≈ 0,I |φ(σ∗)| ≈ 0,I λ1 + σ∗ ≥ 0.
Note thatIn collaboration with Prof. Marcia and Prof. Erway wesubmitted (1) a manuscript (2nd revision), (2) a conferencepresentation and (3) a poster.

J. Brust, R. Marcia
Introduction
Subproblem Solver
Shape-Changing
ParameterInference
NonlinearEigenvalues
Summary andConclusion
References
20/37
Shape-Changing Norms.

J. Brust, R. Marcia
Introduction
Subproblem Solver
Shape-Changing
ParameterInference
NonlinearEigenvalues
Summary andConclusion
References
21/37
Shape-Changing Norms
(Burdakov et al., 2015): Instead of the 2-norm use socalled shape-changing norms
‖s‖P,2 = max(∥∥∥PT
‖ s∥∥∥
2,∥∥PT⊥s∥∥
2
)‖s‖P,∞ = max
(∥∥∥PT‖ s∥∥∥∞,∥∥PT⊥s∥∥
2
),
for the trust-region subproblem
minimize||s||P,·≤∆
Q(s) =
{sTg +
12
sTBs}.
The norms depends on the eigendecomposition of B.

J. Brust, R. Marcia
Introduction
Subproblem Solver
Shape-Changing
ParameterInference
NonlinearEigenvalues
Summary andConclusion
References
22/37
Shape-Changing Subproblems
Idea: Separate subproblem after a change of variables.Let
v =
[v‖v⊥
], PTg =
[g‖g⊥
], B = P
[Λ̂
γIn−m
]PT ,
then using s = Pv find
Q(s) = sTg +12
sTBs
= · · ·≡ q‖
(v‖)
+ q⊥ (v⊥) ,
where
q‖(v‖)
= vT‖g‖ +
12
vT‖ Λ̂v‖, q⊥ (v⊥) = vT
⊥g⊥ +12γ ‖v⊥‖2
2 .

J. Brust, R. Marcia
Introduction
Subproblem Solver
Shape-Changing
ParameterInference
NonlinearEigenvalues
Summary andConclusion
References
23/37
(P, 2)-Norm
The problems decouple, e.g
minimize||s||P,2≤∆
Q(s) = minimize||v‖||2≤∆
q‖(v‖)︸ ︷︷ ︸P1
+ minimize||v⊥||2≤∆
q⊥(v⊥)︸ ︷︷ ︸P2
.
Since q⊥ (v⊥) = vT⊥g⊥ + 1
2γ ‖v⊥‖22 then
v∗⊥ = β · g⊥, β =
−1γ if γ > 0 and
∥∥∥g⊥γ
∥∥∥2≤ ∆,
−∆‖g⊥‖2
otherwise.
P1 is a low dimensional problem.

J. Brust, R. Marcia
Introduction
Subproblem Solver
Shape-Changing
ParameterInference
NonlinearEigenvalues
Summary andConclusion
References
24/37
Shape-Changing Transformation
With v∗ =
[v∗‖v∗⊥
]then transform
s∗ = Pv∗ = P‖v∗‖ + P⊥v∗⊥,
where P =[P‖ P⊥
].
Synopsis:
I Similar analysis for the (P,∞)-Norm ,
I Perform numerical experiments,
I Published manuscript in collaboration with Prof.Erway, Prof. Burdakov and Prof. Yuan.

J. Brust, R. Marcia
Introduction
Subproblem Solver
Shape-Changing
ParameterInference
NonlinearEigenvalues
Summary andConclusion
References
25/37
Parameter Inference for StochasticDifferential Equations.

J. Brust, R. Marcia
Introduction
Subproblem Solver
Shape-Changing
ParameterInference
NonlinearEigenvalues
Summary andConclusion
References
26/37
Parameter Inference
Let a stochastic differential equation be given by
dXt = f (Xt; θ)︸ ︷︷ ︸drift
dt + g (Xt; θ)︸ ︷︷ ︸diffusion
dWt,
where dWt is a Wiener increment, and θ is a vector ofparameters.
Goal: Infer the probabilities
P (Xt = x) .

J. Brust, R. Marcia
Introduction
Subproblem Solver
Shape-Changing
ParameterInference
NonlinearEigenvalues
Summary andConclusion
References
27/37
Parameter Inference
Bhat, Madushani (2016): The DTQ method findsapproximations to probabilities by discretizing in spaceand time
P (Xt = x) ≈ P(X̃tn = xi
)= [pn]i ,
where pn ∈ R2M+1 for M ≥ 1. A recursion exists
pn = Apn−1,
where A ∈ R2M+1×2M+1 and
[A]ij =∆x exp
(− (xi−xj−f (xj,θ)∆t)2
2g2(xj;θ)∆t
)√
2πg2 (xj; θ) ∆t,
and ∆x, ∆t denote space and time discretization steps.

J. Brust, R. Marcia
Introduction
Subproblem Solver
Shape-Changing
ParameterInference
NonlinearEigenvalues
Summary andConclusion
References
28/37
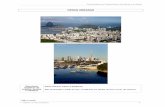
Parameter Inference
Example: f (x; θ) = θ2(θ1 − x) and g (x; θ) = 1.
Left: Non-zeros in A, Right: Spectrum of A.

J. Brust, R. Marcia
Introduction
Subproblem Solver
Shape-Changing
ParameterInference
NonlinearEigenvalues
Summary andConclusion
References
29/37
Parameter Inference
Since the recursion unwinds as
pn = Anp0,
and since the eigenvalues tend to zero quickly, let theeigendecomposition be
A = S[
Λ1Λ2
]S−1,
where Λ1 ∈ Rm×m, Λ2 ∈ R(2M+1−m)×(2M+1−m) andS ∈ R(2M+1)×(2M+1). If |Λ2|j � 1, then
An ≈ S[
Λn1
0
]S−1.

J. Brust, R. Marcia
Introduction
Subproblem Solver
Shape-Changing
ParameterInference
NonlinearEigenvalues
Summary andConclusion
References
30/37
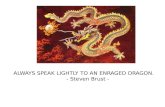
Parameter Inference
Numerical experiment:n = 2000, θ1 = 1.52, θ2 = 1.71,m = 10:
Computed densities are close to the true solution. TimeDTQ: 0.163s, Time Eig: 0.082s.

J. Brust, R. Marcia
Introduction
Subproblem Solver
Shape-Changing
ParameterInference
NonlinearEigenvalues
Summary andConclusion
References
31/37
Nonlinear Eigenvalue Problem
From electronic structure computations
H (X) X = XΛ,
where
Λm×m
: (Eigenvalues), Xn×m
: (Eigenvectors),
and the Hamiltonian is H (X)n×n
.
Observations:I Solved via a fixed point iteration,I H (X) sparse, symmetric,I Only m� n eigenvalues needed.

J. Brust, R. Marcia
Introduction
Subproblem Solver
Shape-Changing
ParameterInference
NonlinearEigenvalues
Summary andConclusion
References
32/37
Summary
Research on optimization using linear algebra andeigenvalues:
I Eigenvalue method for compact Trust-Regionsubproblem,
I Shape-Changing norms,
I Eigenvalues for matrix exponential,
I Non-linear eigenvalues.

J. Brust, R. Marcia
Introduction
Subproblem Solver
Shape-Changing
ParameterInference
NonlinearEigenvalues
Summary andConclusion
References
33/37
Conclusion
Our goals:
I Develop method for eigenvalues of B = γI + VWVT ,
I Develop method for rank and eigenvalues of banded,symmetric A,
I Approximate solutions in the non-linear eigenvalueproblem.

J. Brust, R. Marcia
Introduction
Subproblem Solver
Shape-Changing
ParameterInference
NonlinearEigenvalues
Summary andConclusion
References
34/37
Questions
QΛQT

J. Brust, R. Marcia
Introduction
Subproblem Solver
Shape-Changing
ParameterInference
NonlinearEigenvalues
Summary andConclusion
References
35/37
References:
(1) H. Bhat, R.W.M.A Madushani and S. Rawat."Parameter Inference for Stochastic DifferentialEquations with Density Tracking by Quadrature",2016.
(2) J.J. Brust, J.B. Erway, R.F. Marcia. "On SolvingL-SR1 Trust-Region Subproblems", 2015.
(3) O. Burdakov, L. Gong, Y.-X. Yuan, and S. Zikrin. "OnEfficiently Combining Limited Memory andTrust-Region Techniques". Technical Report2013:13, Linköping University, Optimization, 2015.
(4) R.H. Byrd, J. Nocedal, and R.B. Schnabel."Representations of Quasi-Newton Matrices andtheir use in Limimited-Memory Methods". Math.Program., 63:129-156, 1994.
(5) J.J. Moré and D.C. Sorensen. "Computing ATrust-Region Step". SIAM J. Sci. and Statist.Comput., 4:553-572, 1983.