Objective To investigate particle motion along a curved path “ Curvilinear Motion ” using three...
15
Objective • To investigate particle motion along a curved path “Curvilinear Motion” using three coordinate systems – Rectangular Components • Position vector r = x i + y j + z k • Velocity v = v x i + v y j + v z k (tangent to path) • Acceleration a = a x i + a y j +a z k (tangent to hodograph) – Normal and Tangential Components • Position (particle itself) • Velocity v = u t (tangent to path) n t u u a 2 2 2 2 / 3 2 / ) / ( 1 dx y d dx dy
-
Upload
blake-prosper-hudson -
Category
Documents
-
view
217 -
download
0
Transcript of Objective To investigate particle motion along a curved path “ Curvilinear Motion ” using three...
Objective• To investigate particle motion along a curved path “Curvilinear
Motion” using three coordinate systems
– Rectangular Components• Position vector r = x i + y j + z k
• Velocity v = vx i + vy j + vz k (tangent to path)
• Acceleration a = ax i + ay j +az k (tangent to hodograph)
– Normal and Tangential Components• Position (particle itself)
• Velocity v = ut (tangent to path)
• Acceleration (normal & tangent)
– Polar & Cylindrical Components
nt uua2
22
2/32
/
)/(1
dxyd
dxdy
Curvilinear Motion: Cylindrical Components
• Section 12.8
• Observed and/or guided from origin or from the center
• Cylindrical component
• Polar component “plane motion”
zandr ,,andr
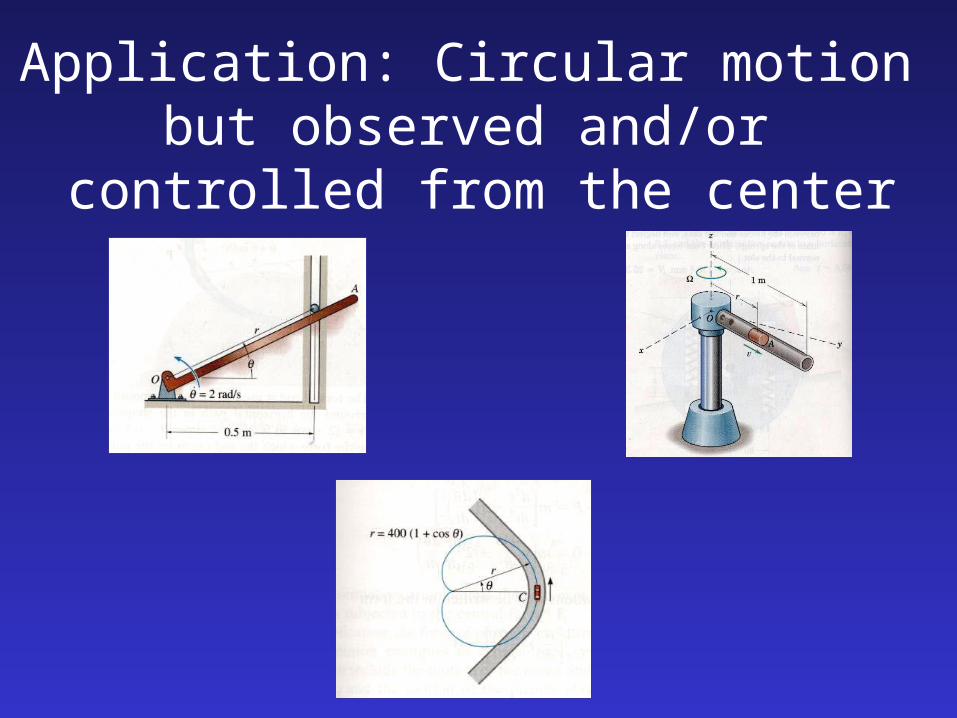
Application: Circular motion but observed and/or controlled from the center
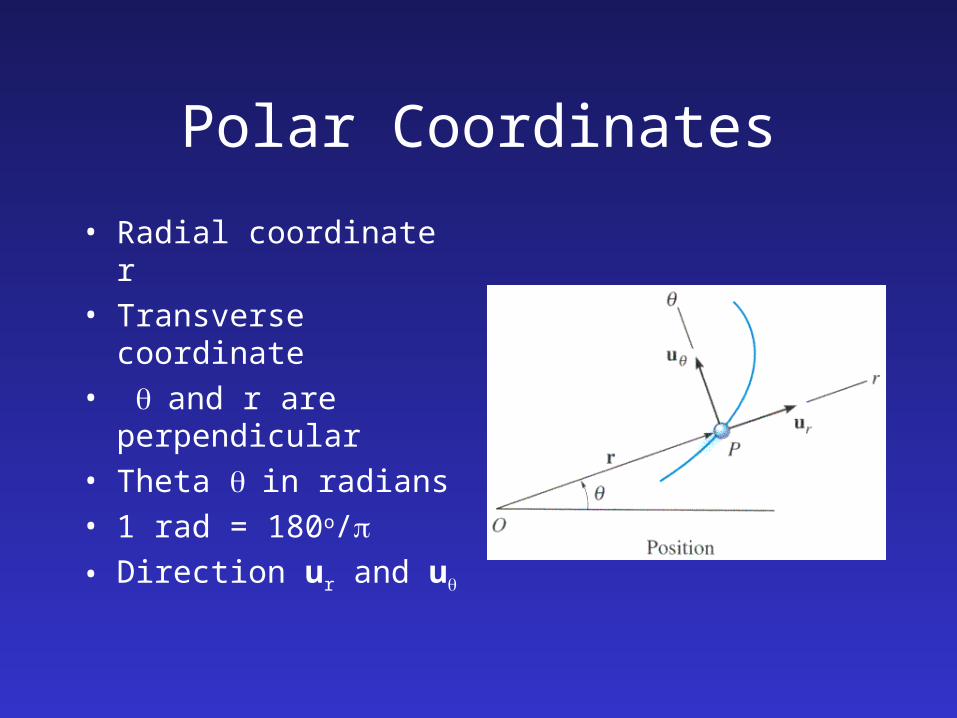
Polar Coordinates
• Radial coordinate r
• Transverse coordinate
• and r are perpendicular
• Theta in radians
• 1 rad = 180o/• Direction ur and u
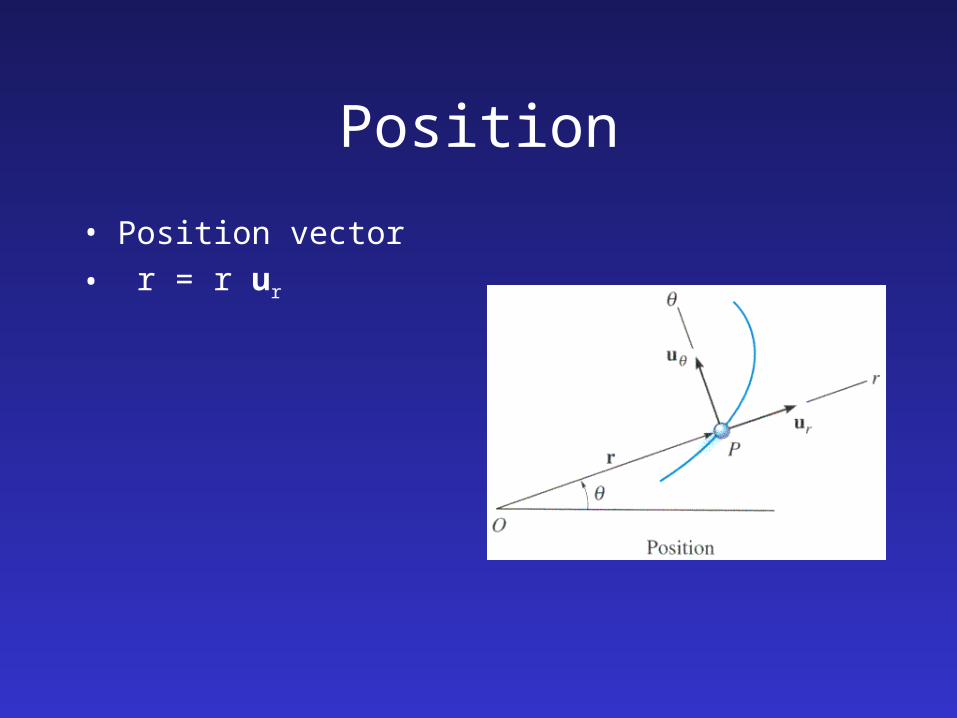
Position
• Position vector
• r = r ur

Velocity• Instantaneous velocity
= time derivative of r
• Where
rr rr uu rv
uu r
uuv rr
randrr
uuv rr r
ru r r
velocitye transversv
velocityradial vr
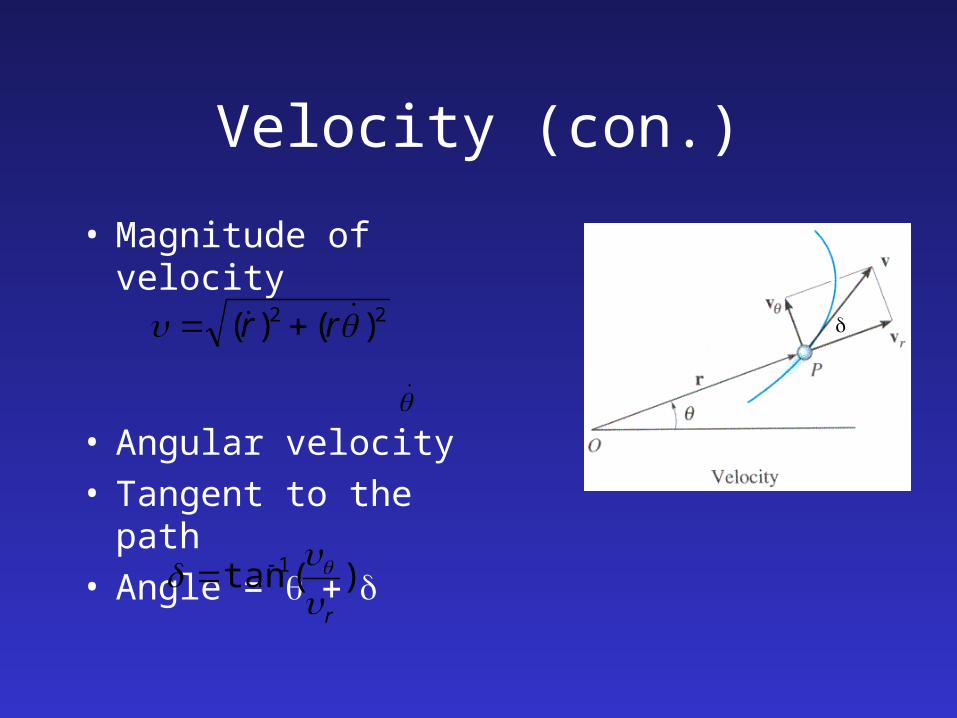
Velocity (con.)
• Magnitude of velocity
• Angular velocity • Tangent to the path• Angle =
22 )()( rr
)(tan 1
r
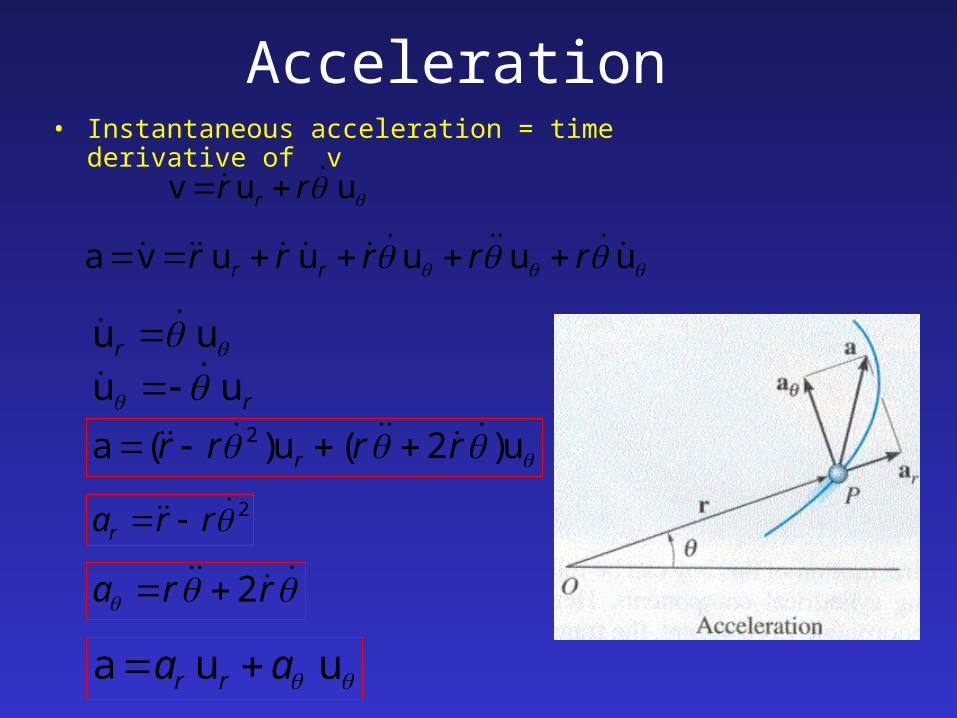
Acceleration• Instantaneous acceleration = time derivative of v
uuv rr r
2 rrar
uuuuu va rrrrr rr
ruu
uua aa rr
rra 2
uu r
u)2(u)(a 2 rrrr r

Acceleration (con.)
• Angular acceleration
• Magnitude
• Direction “Not tangent”• Angle
)/(// 22 dtddtddtd
222 )2()( rrrra
)(tan 1
ra
a
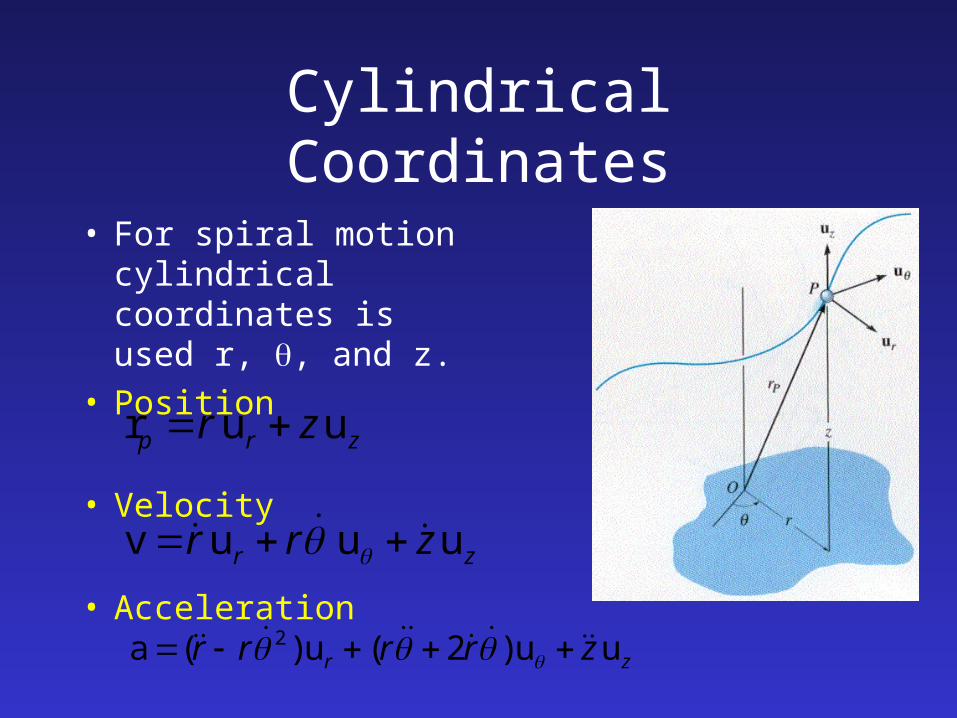
Cylindrical Coordinates
• For spiral motion cylindrical coordinates is used r, , and z.
• Position
• Velocity
• Acceleration
zrp zr uur
zr zrr uuuv
zr zrrrr uu)2(u)(a 2
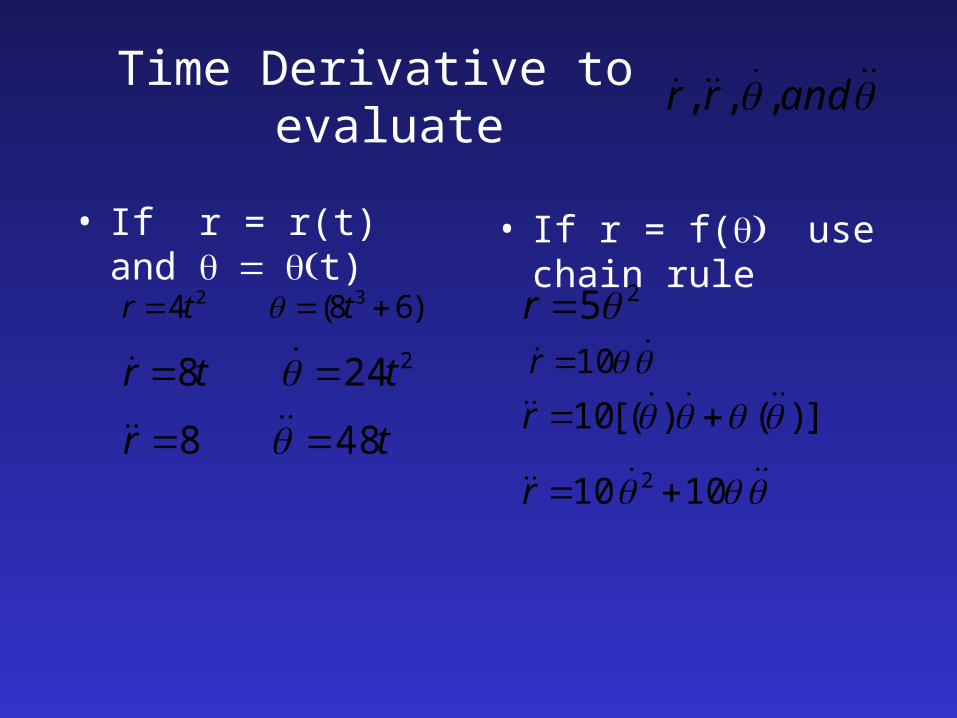
Time Derivative to evaluate
• If r = r(t) and t)
• If r = f( use chain rule
andrr ,,,
)68(4 32 ttr 2248 ttr
tr 488
25r 10r
])()([10 r
1010 2 r
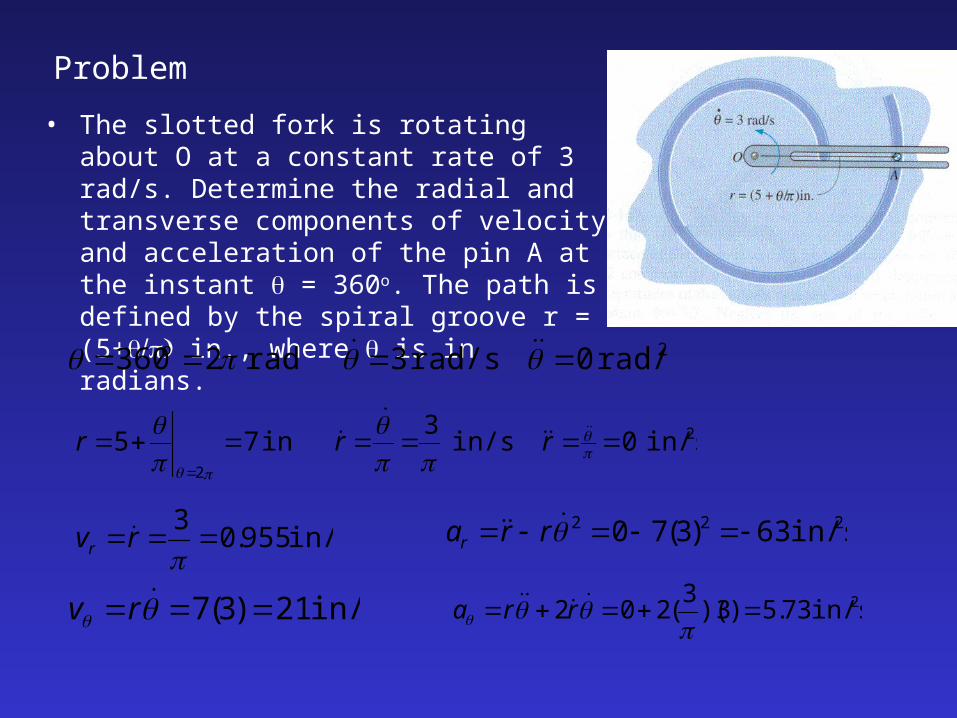
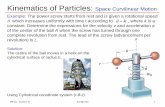
• The slotted fork is rotating about O at a constant rate of 3 rad/s. Determine the radial and transverse components of velocity and acceleration of the pin A at the instant = 360o. The path is defined by the spiral groove r = (5+ in., where is in radians.
2
2
in/s 0 in/s 3
in 75
rrr
2rad/s 0rad/s 3rad 2360 o
in/s955.03
rvr
in/s21)3(7 rv
222 in/s63)3(70 rrar
2in/s73.5)3)(3
(202
rra
Problem

Example 12-20
and find
180at ft/s30
ft/s4
ft)cos1(5.0
o2
a
v
r
)cos1(5.0 r
)sin(5.0r )sin(5.0)()(cos5.0 r
2
o
50 0 ft 1
180at
θ.-rrr
rad/s4 4)1()0()()( 2222 rr
30)]4)(0(21[])4(1)4(5.0[)2()( 2222222 rrrra
2rad/s18

0/84*22
*2 rsmrmr
)56.12()8( 22
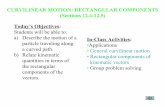
A collar slides along the smooth vertical spiral rod, r = (2) m, where is in radians. If its angular rate of rotation is constant and equal 4 rad/s, at the instant = 90o. Determine
-The collar radial and transverse component of velocity -The collar radial and transverse component of acceleration.
-The magnitude of velocity and acceleration
Problem
222 rrr
2/0/42
sradsradrad
m/s8rvr
m/s56.12)4( rv
222 m/s24.50)4(0 rrar2m/s64)4)(8(202
rra
)64()24.50( 22 a