Cvcofliverandspleen 140720222447-phpapp02-140820043744-phpapp02

of 105
Upload
vishiwizardCategory
view
218download
07/27/2019 notes-13106549652706-phpapp02-110714101758-phpapp02
1/105
Control System Theory & Design
Lecture Notes
Ismail Hameduddin
KING ABDULAZIZ UNIVERSITY
7/27/2019 notes-13106549652706-phpapp02-110714101758-phpapp02
2/105
Contents
Contents 2
1 Introduction to feedback control 41.1 Basic notion of feedback control . . . . . . . . . . . . . . . . . . 41.2 Control architectures . . . . . . . . . . . . . . . . . . . . . . . . 8
2 System models and representation 152.1 Model classification . . . . . . . . . . . . . . . . . . . . . . . . . 152.2 State-space representation . . . . . . . . . . . . . . . . . . . . . 152.3 Input/output differential equation . . . . . . . . . . . . . . . . . 162.4 Transfer functions . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3 Dynamic response of systems 193.1 First-order system response . . . . . . . . . . . . . . . . . . . . . 193.2 Second-order systems . . . . . . . . . . . . . . . . . . . . . . . . 19
3.3 Design considerations . . . . . . . . . . . . . . . . . . . . . . . . 213.4 Routh-Hurwitz stability criterion . . . . . . . . . . . . . . . . . . 213.5 Pole/Zero effects . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4 Frequency response tools 254.1 Frequency response . . . . . . . . . . . . . . . . . . . . . . . . . 254.2 Bode plots . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 254.3 Gain and phase margins . . . . . . . . . . . . . . . . . . . . . . . 274.4 Phase margin and second-order systems . . . . . . . . . . . . . . 294.5 Root-locus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 294.6 Nyquist stability criterion . . . . . . . . . . . . . . . . . . . . . . 324.7 Feedback with disturbances . . . . . . . . . . . . . . . . . . . . . 374.8 Trends from Bode & Poissons integral constraints . . . . . . . . 394.9 Upper bounds on peaks for sensitivity integrals . . . . . . . . . . 42
5 Frequency domain control design 435.1 Direct pole-placement . . . . . . . . . . . . . . . . . . . . . . . . 435.2 Modeling errors . . . . . . . . . . . . . . . . . . . . . . . . . . . 455.3 Robust stability . . . . . . . . . . . . . . . . . . . . . . . . . . . 455.4 Robust performance . . . . . . . . . . . . . . . . . . . . . . . . . 475.5 Internal Model Principle . . . . . . . . . . . . . . . . . . . . . . . 48
6 State-space techniques 496.1 Transfer function to state-space . . . . . . . . . . . . . . . . . . . 49
2
7/27/2019 notes-13106549652706-phpapp02-110714101758-phpapp02
3/105
Contents
6.2 Eigenvalues & eigenvectors . . . . . . . . . . . . . . . . . . . . . 50
6.3 Solution and stability of dynamic systems . . . . . . . . . . . . . 506.4 State transformation . . . . . . . . . . . . . . . . . . . . . . . . . 556.5 Diagonalization . . . . . . . . . . . . . . . . . . . . . . . . . . . 556.6 State-space to transfer function . . . . . . . . . . . . . . . . . . . 576.7 Cayley-Hamilton Theorem . . . . . . . . . . . . . . . . . . . . . . 586.8 Controllability & reachability . . . . . . . . . . . . . . . . . . . . 596.9 Controllability gramian . . . . . . . . . . . . . . . . . . . . . . . 646.10 Output controllability . . . . . . . . . . . . . . . . . . . . . . . . 656.11 Control canonical form and controllability . . . . . . . . . . . . . 666.12 S tabilizability . . . . . . . . . . . . . . . . . . . . . . . . . . . . 686.13 Popov-Belevitch-Hautus test for controllability and stabilizability . 726.14 O bservability . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 726.15 Observability gramian . . . . . . . . . . . . . . . . . . . . . . . . 75
6.16 Observable canonical form and observability . . . . . . . . . . . . 756.17 D etectability . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 766.18 PHB test for observability and detectability . . . . . . . . . . . . 766.19 Duality between observability and controllability . . . . . . . . . . 76
7 Control design in state-space 777.1 State feedback design/Pole-placement . . . . . . . . . . . . . . . 777.2 Ackermanns formula . . . . . . . . . . . . . . . . . . . . . . . . 797.3 SISO tracking . . . . . . . . . . . . . . . . . . . . . . . . . . . . 817.4 SISO tracking via complementary sensitivity functions . . . . . . . 817.5 SISO tracking via integral action . . . . . . . . . . . . . . . . . . 827.6 Stabilizable systems . . . . . . . . . . . . . . . . . . . . . . . . . 83
7.7 State observer design/Luenberger state observer/estimator design 877.8 Disturbance observers . . . . . . . . . . . . . . . . . . . . . . . . 907.9 Output feedback control . . . . . . . . . . . . . . . . . . . . . . 927.10 Transfer function for output feedback compensator . . . . . . . . 937.11 SISO tracking with output feedback control . . . . . . . . . . . . 93
8 Basic notions of linear algebra 95
3
7/27/2019 notes-13106549652706-phpapp02-110714101758-phpapp02
4/105
Chapter 1
Introduction to feedback control
We introduce feedback in terms of what will be discussed in these notes.
1.1 Basic notion of feedback control
A block diagram illustration of an ideal standard feedback control system is shownin Fig. 1.1.
Figure 1.1: Block diagram illustration of ideal feedback control system.
The idea of feedback is straightforward: we monitor the actual output of the systemor plant, then generate an error signal based on the difference between the desiredoutput and the actual output of the dynamic system and finally use this error termin a compensator which gives a control signal that can act as an input to the actualsystem.
The compensator is a general term and it can be anything such as an algorithm,function or just a simple gain, i.e., a constant value multiplying the error. Thegoal of control design is to determine an appropriate compensator to achieve per-formance objectives. The plant in the system is the dynamic system that is beingcontrolled. We model this system via mathematical tools and use it to designthe compensator. A mathematical model is always an approximation of the realmodel since we cannot effectively model everything present in the real world and wecannot also take into account variations in parameters such as geometries, forcesand operating conditions. Thus, there always exists some uncertainty in the plantmodel which directly affects compensator design.
4
7/27/2019 notes-13106549652706-phpapp02-110714101758-phpapp02
5/105
1.1. Basic notion of feedback control
Feedback goes beyond mathematical functions and abstractions. It is a fact of
everyday life. An obvious example of human feedback is when you adjust thewater temperature in the shower. The hot-cold knob is adjusted until a comfortableposition is reached. In this case, the skin monitors the output of the system, i.e.,the temperature of the water. It then sends this signal to the brain that judges thedifference between the desired water temperature and actual water temperature.This difference is then used by the brain to general a control signal that commandsthe hand to adjust the knobs to reduce this difference. If the water is cold, youshiver, the brain determines that you need to be warmer, it sends a signal toyour hand to adjust the knob for warmer water until you stop shivering. Controlengineering is then simply the attempt to mimic the elegant, efficient and effectivecontrol of processes apparent in nature.
We mentioned that the goal of control design is to determine an appropriate com-
pensator to achieve performance objectives. Some common performance objectivesare listed below:
Stability of the closed-loop system. Dynamic response to be satisfactory, e.g.,
Settling time (time of response).
Percent overshoot.
Tracking/steady-state error small. Remain within hardware limits, e.g., forces and voltages.
Eliminate impact of disturbances such as wind gusts in UAVs and inclinesin a car cruise control system.
Eliminate impact of measurement noise. Eliminate impact of model uncertainty.
The above wish list is not something that is not usually completely possible due tothe existence of fundamental limitations in the the system. There is nothing calleda free lunch. However, we can via feedback control and other strategies, trade-off these fundamental limitations with respect to each other to achieve the bestpossible scenario based on requirements. This is the essence of control engineering.
An example of the previous is when we try to have aggressive control, i.e. small
response time, and also eliminate the impact of model uncertainty. The bandwidthof the system is a measure of the aggressiveness of the control action and/orthe dynamic response. A higher bandwidth implies a higher frequency at whichwe have good response and therefore more aggressive control. But at the sametime, in most models, the magnitude of the uncertainty becomes large at higherfrequencies. Hence we limit the bandwidth or frequency of response dependingon the frequency at which uncertainty begins to become significant. We want lowmagnitude of response at frequencies where model uncertainty magnitude becomeshigh to reduce the system sensitivity to this uncertainty. This is a situation where,since we cannot avoid model uncertainties, we have to limit the aggressiveness ofthe response to avoid the uncertainty becoming significant.
5
7/27/2019 notes-13106549652706-phpapp02-110714101758-phpapp02
6/105
1.1. Basic notion of feedback control
Actual control systems
We often treat the control and feedback of systems as an idealized scenario to aidin the design process. It is important for the control engineer to appreciate theactual complex nature of control systems. It is instructive to do this through asimple example.
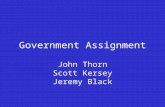
Recently, there has been a growing research interest in applications of piezoelec-tric materials. These are very sensitive materials that produce a voltage sig-nal when they sense a force. The converse phenomenon is also true, i.e., aforce/displacement is produced in the material when voltage is applied to it. Thischaracteristic is considered particularly advantageous and is being tested in a widevariety of applications. Among these is their use as a variable valve actuator infuel injector systems.
Figure 1.2: Schematic of a proposed piezoelectric variable valve injector system.
Fuel injection for an internal combustion engine should ideally be tightly controlledto produce an air-fuel mixture that reduces pollutants and increases efficiency whileat the same time mitigating undesirable phenomena such as combustion instability.This is possible through a variable valve that regulates the amount of fuel flowingthrough the cylinder nozzle.
One type of assembly of such a variable valve available in the literature is shown
6
7/27/2019 notes-13106549652706-phpapp02-110714101758-phpapp02
7/105
1.1. Basic notion of feedback control
in Fig. 1.21. The piezo stack at the top consists of a stacked combination
of piezeoelectric materials that produces the desired displacement characteristicswhen voltage is applied. The voltage is applied by the piezo stack driver. Whenthe piezo stack expands (due to voltage via the piezo stack driver), it moves thetop link down which in turn pushes the bottom link down. This displaces fluidout of the needle upper volume into the injector body and we would expect theneedle lower volume to be reduced as well. However, assuming incompressibility,this cannot happen because the needle lower volume does not have an openinginto the injector body. Instead, to compensate for the loss of volume induced bythe bottom link moving down, the needle is pushed up by the fluid. This opens thenozzle. In a similar fashion, with appropriate voltage, the nozzle is closed as well.The piezo stack via mechanical means, controls the nozzle state and it is hencecalled a variable valve actuator (VVA). The chief benefits of using piezoelectricmaterials here is their quick response (high bandwidth) and because incorporation
of a piezoelectric actuator helps eliminate many mechanical, moving parts which inturn reduces cost and increases reliability. The disadvantage is that the maximumexpansion achievable by piezoelectric materials is usually low. This is remediedby using the stair-like ledge shown in Fig. 1.2 which acts as a displacementmultiplier. A larger ledge causes a larger loss of needle lower volume when thebottom link moves down which makes the needle displace more to compensate forlost volume.
The idealized block diagram that is used in control design is shown in Fig. 1.3. Itis supposed to be as simple as possible in order to capture only the most essentialcharacteristics of the system. The actual valve position and the desired valveposition together generate an error signal and the compensator is used to determinethe appropriate voltage signal that will eventually reduce this error to zero. Here
the VVA is actually a 5 state control oriented model, i.e., it needs 5 variables to befully described in the time domain. These states include position of the actuator,velocity of the actuator and the pressure. A full model description of the VVA wouldentail many more states that do not have as much effect on the system responsebut greatly affect the complexity of the problem. Such models are sometimes calledsimulation models because we use them to simulate the response of the systemrather than use them to determine an appropriate compensator (control design).
Figure 1.3: Block diagram of an ideal closed-loop variable valve actuator system.
The actual or close to actual block diagram is shown in Fig. 1.4. Here we do notignore any known elements from our system. The valve position is measurement
1Chris Satkoski, Gregory M. Shaver, Ranjit More, Peter Meckl, and Douglas Memering,Dynamic Modeling of a Piezo-electric Actuated Fuel Injector, IFAC Workshop on Engine andPowertrain Control Simulation and Modeling, 11/30-12/2/2009, IFP, Rueil-Malmaison, France.
7
7/27/2019 notes-13106549652706-phpapp02-110714101758-phpapp02
8/105
1.2. Control architectures
by the linear variable displacement transducer (LVDT) in an analog form. This is
then converted to a digital signal by an analog to digital converter (A/D). It isthen used to generate an error signal based on the desired valve position. The erroris fed into the compensator which outputs a digital signal which is converted toan analog voltage via a digital to analog converter (D/A). This signal is amplifiedusing a pulse-width modulation (PWM) amplifier and then supplied to the VVAactuator.
Figure 1.4: Block diagram of a closed-loop variable valve actuator system.
It is obvious that this is far more complicated system than the one consideredearlier. Every element in the system has its own dynamics which may or maynot include time delay. Furthermore we have errors in measurement and digiti-zation/quantization error. We cannot remove any elements from consideration inthis system without first verifying their effect and on the entire system. If thedynamics of the element are fast enough to approximate as a straight line ratherthan a block in the diagram, then we can often ignore the element. For sensorssuch as the LVDT, this may be accomplished by checking manufacturer publishedinformation about them such as bandwidth, damping ratio, etc. This is a fairlysimple example but more complicated systems such as flight control systems mayhave hundreds of these blocks. These notes only deal with the situation in Fig.1.3.
1.2 Control architectures
We now consider several commonly used control architectures. In the following,the reference command is given by the transfer function R(s), the plant by G(s),the output by Y(s), the compensator C(s), disturbances by D(s) and noise byN(s).
8
7/27/2019 notes-13106549652706-phpapp02-110714101758-phpapp02
9/105
1.2. Control architectures
Open-loop/Feedforward control
We now consider the simplest case of control called open-loop or feedforwardcontrol. As the name suggests, there is no feedback of the output back to thecompensator. Rather everything is done without output measurements. A blockdiagram representing a simple feedforward scheme is shown in Fig. 1.5.
Figure 1.5: Block diagram of a feedforward variable valve actuator system.
The transfer function from the output to the input is simply
Y
R= CG Y = CGR (1.1)
where the arguments have been dropped for convenience. Since ideally we wantY(s) = R(s), a natural choice for the compensator would be C(s) = G1(s)which leads to
Y = CGR = G1GR = R. (1.2)
This looks like a perfect scenario but we made some critical assumptions whichmakes the previous result problematic. One assumption was that there are nodisturbances anywhere in the system. This assumption is false since we alwayshave disturbances in the system.
Although there may be multiple disturbances in different parts of the system, wenow consider one type of disturbance in the system for simplicity and for illustrativepurposes. Let there be a disturbance in the control signal being fed into the plant,i.e., the control signal input into the plant is not the same as the compensatoroutput. This situation is illustrated in Fig. 1.6. For such a system we can derive
Figure 1.6: Block diagram of a feedforward variable valve actuator system withdisturbance.
the transfer function from the reference R(s) to the output Y(s) as
Y = G(CR + D) = GCR + GD (1.3)
and substituting the previous compensator choice C(s) = G1(s)
Y = GG1R + GD = R + GD. (1.4)
9
7/27/2019 notes-13106549652706-phpapp02-110714101758-phpapp02
10/105
1.2. Control architectures
Therefore, even in the case of a single source of disturbance, feedforward fails to
provide good reference tracking since now we have an extra G(s)D(s) term thatis unwanted and perturbs the output from the reference signal.
Another assumption is of having no model uncertainty. This is always false sincethere is always uncertainty in a mathematical reasons for a variety of reasons suchas lack of modeling of certain dynamics for simplicity and physical variation betweensystems. Thus, we dont have an actual true model but a perturbed model G(s)and therefore we can only have G1(s). Substituting this into (1.1) gives
Y = CGR = G1GR = R. (1.5)where is some factor dependent on the model uncertainty. Feedforward failswhen we have uncertainty in the model. A more acute problem occurs when G(s)
and hence G(s) have right-half plane (RHP) zeros, i.e., roots of the numeratorhave positive real parts. In this situation, G1(s) will have RHP poles, i.e., rootsof the denominator have positive real parts; something that characterizes unstablesystems. And since G1 = G1, there will never be perfect cancellation of the RHPpoles and zeros. Hence, the entire feedforward system (even without disturbances)will be unstable because of the existence of RHP poles.
Even though the previous has painted a bleak picture, feedforward control is still auseful tool as long as it is used in an intelligent manner. We sometimes combinefeedback and feedforward control to achieve excellent results as will be shown later.
Feedback/closed-loop control
We consider the previous problem of having input disturbance but now we employa feedback scheme to tackle the control and reference tracking problem. We alsoadd noise to the measurement of the output; something that is expected andunavoidable. The block diagram of such a closed-loop system is shown in Fig. 1.7.
Figure 1.7: Block diagram of a feedback variable valve actuator system with dis-turbance and noise.
10
7/27/2019 notes-13106549652706-phpapp02-110714101758-phpapp02
11/105
1.2. Control architectures
Following basic procedures, we determine the system transfer function as
Y = GC(R Y N) + GD (1.6)=
GC
1 + GCR +
G
1 + GCD GC
1 + GCN (1.7)
= YR + YD YN (1.8)where YR(s) is the transfer function from R(s) to Y(s), YD(s) is the transferfunction from D(s) to Y(s) and YN(s) is the transfer function from N(s) toY(s). For the output to perfectly track the reference input, we want YR(s) 1,YD(s) 0 and YN(s) 0. Let the compensator be a large number, i.e., C(s) , then
G
1 + GC 1 YD = 0 (1.9)
which implies complete disturbance rejection, i.e., the feedforward problem issolved. Furthermore,
GC
1 + GC 1 YR = 1 (1.10)
which is exactly what we want for perfect reference tracking. This is the motivationbehind high gain feedback. But we also have
GC
1 + GC 1 YN = 1 (1.11)
which means the noise is amplified; something we certainly do not want. Thereis an inherent problem here because the coefficient of R(s) and N(s) are thesame. Thus, we cannot have YR(s) 1 and YN(s) 0 simultaneously. Wehave a fundamental contradiction here. The only way to get rid of noise is to setC(s) = 0 but then this leads to no control action.
Feedback helps us deal with disturbances and plant uncertainty. High gain feedbacklooks similar to plant inversion in feedforward control but only better. It givesus a plant inversion like process and mitigates the effect of disturbances. Thedrawback, however, is that mitigating noise and perfect tracking cannot be donesimultaneously.
In many situations, the reference tracking is in a low frequency range. An exampleof this would be the reference signal of the bank angle of a commercial airliner.Also, for most sensors, noise becomes prevalent mainly in the frequency ranges.Thus we can design C(s) such that the transfer function
YR = YN =
GC
1 + GC (1.12)
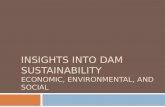
is 1 at low frequencies (to aid in reference track) and 0 at high frequencies (tomitigate measurement noise). The frequency response for such a transfer functionis shown in Fig. 1.8.
Figure 1.8 shows a transfer function with a bandwidth (i.e. approx. roll-off fre-quency) of 7 radians per second. It implies, for perfect tracking and noise mitiga-tion, that the reference signal must be predominant in frequencies below 7 radiansper second and the measurement noise must be predominant in frequencies above 7radians per second. Thus, the extent to which you can be aggressive with control,i.e. have high bandwidth, depends on two factors:
11
7/27/2019 notes-13106549652706-phpapp02-110714101758-phpapp02
12/105
1.2. Control architectures
101
100
101
102
103
50
45
40
35
30
25
20
15
10
5
Magnitude(dB)
Frequency (rad/sec)
Figure 1.8: Typical frequency response magnitude of YR = YN to mitigate noiseand provide good tracking..
The frequency range at which the noise is present. The reference signal frequency range.
This is an example of a fundamental limitation in a feedback situation. The ag-gressiveness of the control is limited by the measurement noise and the referencesignal frequency range.
When we close the loop, it allows us to trade off the impact of disturbances, noise,reference tracking signals and stability among others. It gives us the freedom totrade off quantities which we might not have been able to otherwise, such asplant uncertainty, noise mitigation and tracking accuracy. These notes deal withdeveloping a sophisticated outlook and precise tools to do tradeoffs.
Feedback with feedforward
Another way to tackle the above problems is to include a feedforward term inthe feedback architecture as shown in Fig. (1.9). Here Gf(s) is the feedforwardtransfer function. The transfer function of the system is
Y = GC(R Y N) + GGfR + GD Y(1 + GC) = (GC+ GGf)R + GD GCN (1.13)
and hence
Y =GC+ GGf
1 + GCR +
G
1 + GCD GC
1 + GCN (1.14)
= YR + YD YN. (1.15)
As before, we want YR(s) 1, YD(s) 0 and YN(s) 0. Notice we have anextra degree of freedom in the design of YR(s) due to the feedforward term Gf(s).
12
7/27/2019 notes-13106549652706-phpapp02-110714101758-phpapp02
13/105
7/27/2019 notes-13106549652706-phpapp02-110714101758-phpapp02
14/105
1.2. Control architectures
Figure 1.10: Block diagram of a combined feedback and disturbance feedbackvariable valve actuator system with disturbance and noise.
From Fig. 1.10 we have
Y = GC(R Y N) + CGDGD + GD Y(1 + GC) = GCR + (GCGD + G)D GCN (1.19)
and hence
Y =GC
1 + GCR +
GGDC+ G
1 + GCD GC
1 + GCN (1.20)
= YR + YD YN. (1.21)
Again we want YR(s) 1, YD(s) 0 and YN(s) 0. Now we seem to havemore flexibility because setting GD(s) = C1(s) gives
GGDC+ G = CC1G + G = 0 GGDC + G1 + GC
= 0 (1.22)
which implies that we have perfect disturbance rejection. But again this methodhas its own challenges because we need to have knowledge of the disturbance.
This can be through estimation, especially if we have some idea about the natureof disturbance. For example, the disturbance in a manufacturing when the floorshaking in a repeating.
14
7/27/2019 notes-13106549652706-phpapp02-110714101758-phpapp02
15/105
7/27/2019 notes-13106549652706-phpapp02-110714101758-phpapp02
16/105
2.3. Input/output differential equation
Next consider a set of algebraic equations relating outputs to state variables and
inputs,
y1 = g1(x1,...,xn, u1,...,um) (2.3)
.
.
.
yp = gp(x1,...,xn, u1,...,um). (2.4)
If we let x = [x1,...,xn]T, u = [u1,...,um]
T, and y = [y1,...,yp]T, then the above
relationships can be written in the compact state-space form
x = f(x, u) (2.5)
y = g(x, u). (2.6)
If the system considered is linear then it can be written in the linear parametervarying form (LPV)
x = A(t)x + B(t)u (2.7)
y = C(t)x + D(t)u (2.8)
or if the system is linear time-invariant (LTI)
x = Ax + Bu (2.9)
y = Cx + Du (2.10)
where A, B, C and D are the relevant matrices.
States are the smallest set of n variables (state variables) such that knowledgeof these n variables at t = t0 together with knowledge of the inputs for t t0determines system behaviour for t t0. The state vector is the n-th order vectorwith states as components and the state-space is the n-dimensional space withcoordinates as the state variables. Correspondingly, the state trajectory is the pathproduced in the state-space as the state vector evolves over time.
The advantages of the state-space representation are that the dynamic model isrepresented in a compact form with regular notation, the internal behaviour of thesystem is given treatment, the model can easily incorporate complicated outputfunctions, definition of states helps build intuition and MIMO systems are easily
dealt with. There are many tools available for control design for this type of modelform. The drawback of the state-space representation is that the particular equa-tions themselves may not always be very intuitive.
2.3 Input/output differential equation
The input/output differential equation relates the outputs directly to the inputs.It is obtainable usually through taking the Laplace transform of the state-spacerepresentation, substituting/rearranging appropriately and finally taking the inverse
16
7/27/2019 notes-13106549652706-phpapp02-110714101758-phpapp02
17/105
2.4. Transfer functions
Laplace transform to obtain an high-order differential equation. A linear time-
invariant input/output differential equation is given byyn + an1y
n1 + ... + a1y + a0y = bmum + bm1u
m1 + .... + b1u + b0u (2.11)
The advantages of input/output differential equations are that they are concep-tually simple, can easily be converted to transfer functions and many tools areavailable in this context for control design. It is however difficult to solve in thetime domain since we would need to solve the Laplace transform which is generallynot an easy task.
2.4 Transfer functions
Recall from the study of Laplace transforms the following important transforma-tions
L[f(t)] = sF(s) f(0) (2.12)L[f(t)] = s2F(s) sf(0) f(0) (2.13)
.
.
.
L[fn(t)] = snF(s) sn1f(0) sn2f(0) ... syn2(0) yn1(0). (2.14)Now consider a generic LTI input/output differential equation given by
yn + an1yn1 + ... + a1y + a0y = bmum + bm1um
1 + .... + b1u + b0u. (2.15)
Applying the Laplace transforms from above to this differential equation yields
snY(s) + an1sn1Y(s) + ... + a1sY(s) + a0Y(s) + fy(s, t = 0) =
bmsmU(s) + ... + b1sU(s) + b0U(s) + fu(s, t = 0) (2.16)
where fy(s, t = 0) and fu(s, t = 0) are functions of the initial conditions as givenby the Laplace transform. Rearranging the above gives
Y(s) =bmsm + ... + b1s + b0
sn + an1sn1 + ... + a01
U(s) +fu(s, t = 0) fy(s, t = 0)sn + an1sn1 + ... + a0
2
.
(2.17)Box 1 represents the transfer function and it describes the forced response of thesystem. Box 2 represents the free response of the system depending on the initialconditions. Depending on the system (whether it has control input or not) and theexact system scenario (whether the initial conditions are zero or not), Y(s) maycomprise box 1 or box 2 or both. For control analysis, we usually assume box 2is zero and thus box 1 represents the entire system response. It will be seen laterthat many results which are true for this case are also true when box 1 is zero andbox 2 is not.
The roots of the numerator of a transfer functions are called zeros since they sendthe transfer function to zero whereas the roots of the denominator of a transfer
17
7/27/2019 notes-13106549652706-phpapp02-110714101758-phpapp02
18/105
2.4. Transfer functions
function are called poles since they send the transfer function to . The poles andzeros are very important in analyzing system response and for designing appropriatecompensators.
18
7/27/2019 notes-13106549652706-phpapp02-110714101758-phpapp02
19/105
Chapter 3
Dynamic response of systems
3.1 First-order system response
A first-order system (such as a spring-mass system) takes on the general form
y + y = ku (3.1)
y + y
=k
u (3.2)
y + ay = bu, a = 1/ , b = k/ (3.3) [sY(s) + y(0)] + Y(s) = kU(s) (3.4)
Y(s) =k/
s + (1/)1
U(s) +y(0)
s + (1/)2
(3.5)
where is the time constant of the system response and k is a constant.
The roots of the denominator of the transfer function (the characteristic equation)are called poles and in this case the pole is a = 1. If the pole lies in theleft-half of the complex s-plane (LHP), it is stable (exponentially decreasing). If itis in the right-half of the complex s-plane (RHP) then it is unstable (exponentiallyincreasing). A pole on the imaginary axis (with real part equal to 0) is marginallystable.
The free response of this system (due to the initial conditions) is given by yfree(t) =y(0)e
t = y(0)eat.
The forced response of the system to a step input is given by ystep(t) = k +
[y(0) k]e t . The value ofy at the time constant value is given by y() =0.368y(0) + 0.632k. The lower is, the faster the response. Thus, making |a|bigger gives a faster response.
3.2 Second-order systems
The general form of a second-order system is given by
y + 2ny + 2ny = k
2nu (3.6)
19
7/27/2019 notes-13106549652706-phpapp02-110714101758-phpapp02
20/105
3.2. Second-order systems
where k is a constant, n is the natural frequency of the system, and is the
damping ratio. Taking the Laplace transform as before yields the system in termsof its forced and free response,
Y(s) =k2n
s2 + 2ns + 2n1
U(s) +[s + 2n]y(0) + y(0)
s2 + 2ns + 2n2
(3.7)
where the common denominator is the open loop characteristic equation and whoseroots give the system poles. For such a canonical form of second-order system, thepoles are given by n n
2 1. If 0 < < 1, then we have two complex
poles (since 2 1 is negative) implying oscillation in the system free response. Inthis case poles are given by n n
1 2j
The free response of a second-order system (0 < < 1) is given by
yfree(t) =y(0)1 2 e
nt cos t + tan11 2
(3.8)
It can be easily seen from the above that we need n > 0 or alternatively thepoles in the LHP for stability.
The forced response of a second-order system (0 < < 1) to a step is given by
ystep(t) = k
1 e
nt1 2 sin
dt + tan
1
1 2
(3.9)
where d = n1 2.
For a second-order system, the rise time tr is given by
tr =
d(3.10)
where is the angle such that cos = . The time to maximum overshoot isgiven by
tp =
d=
Td2
(3.11)
and the maximum overshoot Mp itself is given by
Mp = e
12 e (3.12)where the percent overshoot can be determined by multiplying the above expressionby 100.
If the system is nonminimum phase (RHP zeroes), then the response will haveundershoot instead of overshoot. When the system has a RHP zero at s = c, alower bound for the undershoot Mu is given by
Mu 1 ects 1 (3.13)
where is the maximum allowable steady-state error in response beyond the settlingtime. Thus for a 2% settling time, = 0.02.
20
7/27/2019 notes-13106549652706-phpapp02-110714101758-phpapp02
21/105
3.3. Design considerations
3.3 Design considerations
We consider the case where we require a certain percent overshoot in our system.We know that the damping ratio is a critical factor in this, but how must it bechosen such that we have a certain percent maximum overshoot? Moreover, howmust we choose our poles so that this choice of is satisfied.
We can use the relationship for percent overshoot given previously to determinethe damping ratio that will ensure a certain maximum overshoot, %OS. As longas we choose a damping ratio greater than %OS, we will not exceed the specifiedmaximum overshoot. In the complex s-plane, the following can easily be shown tobe true
cos = (3.14)
where is a counterclockwise angle made with the negative real axis. Hence any
poles that lie on or between the lines described by = cos1 (%OS) satisfy %OS.For a LHP pole a, it is true that = 1/a. Thus, a larger magnitude of a LHPpole signifies a faster response and these poles are known as fast poles. The 2%setting time is given by t2% = 4 and the 5% settling time is given by t5% = 3,where is the time constant. Hence, to achieve a settling time of t2% or lessrequires placing the poles of the system to the left of a = 4t2% . A similar resultcan be easily derived for t5%.
We can combine the above to results for maximum overshoot and settling time todetermine precise poles for a desired system response.
3.4 Routh-Hurwitz stability criterion
As discussed previously, poles in the RHP indicate instability of a system. There-fore, the roots of the denominator of a transfer function hold key informationregarding the stability and response characteristics of the system.
Consider the denominator of a closed-loop transfer function, also known as theclosed-loop characteristic equation,
CLCE(s) = sn + a1sn1 + . . . + an1s + an = 0 (3.15)
where a1, . . . , an are real constants. The system is stable if the roots of theCLCE(s) are in the LHP. If the system is stable, then a1, . . . , an > 0 but a1, . . . , an >0 does not necessarily imply stability. Furthermore, if any ak 0, then the systemhas at least one pole with a positive or zero real part which implies stability ormarginal stability, respectively.
The Routh-Hurwitz stability criterion helps determine not only whether a systemis stable or not but it also specifies how many unstable poles are present withoutexplicitly solving the characteristic equation, CLCE(s). It can also be used formultiple gain closed-loop systems.
By the Routh-Hurwitz stability criterion, if a1, . . . , an = 0 and ifa1, . . . , an are allpositive (or equivalently all negative) then we can use the Routh array to determinestability and the number of unstable poles.
21
7/27/2019 notes-13106549652706-phpapp02-110714101758-phpapp02
22/105
3.4. Routh-Hurwitz stability criterion
To form the Routh array, first arrange a1, . . . , an in two rows as follows
Rown 1 a2 a4 . . . 0
n-1 a1 a3 a5 . . . 0
Then we determine the rest of the elements in the array. For the third row,coefficients are computed using the pattern below
b1 =
1 a2a1 a3
a1b2 =
1 a4a1 a5
a1b3 =
1 a6a1 a7
a1. . . (3.16)
This is continued until the remaining elements are all zero. Similarly, for the fourth
row
c1 =
a1 a3b1 b2
b1c2 =
a1 a5b1 b3
b1c3 =
a1 a7b1 b4
b1. . . (3.17)
and for the fifth row
d1 =
b1 b2c1 c2
c1d2 =
b1 b3c1 c3
c1d3 =
b1 b4c1 c4
c1. . . (3.18)
where all the series of elements are continued until the remaining are all zero. TheRouth array is then given by
Rown 1 a2 a4 . . . 0
n-1 a1 a3 a5 . . . 0n-2 b1 b3 b5 . . . 0n-3 c1 c3 c5 . . . 0n-4 d1 d3 d5 . . . 0
. . .
. . .
. . .2 e1 e21 f1
0 g1
The number of roots of the closed-loop characteristic equation in the RHP is equalto the number of changes in sign of the coefficients of the first column of the array[1, a1, b1, c1, . . .]. The system is stable if and only if a1, . . . , an > 0 and all theterms in [1, a1, b1, c1, . . .] are positive.
We have a special case when the first element in a row becomes zero, since thisimplies division by 0 for succeeding rows. For this case, replace the 0 with (arbitrarily small constant) and continue with obtaining expressions for the elementsin the succeeding rows. Finally, when all expressions are obtained, let 0 andevaluate the sign of the expressions. This is all that is needed since we are only
22
7/27/2019 notes-13106549652706-phpapp02-110714101758-phpapp02
23/105
3.5. Pole/Zero effects
concerned with sign changes. If we find no sign changes, then the 0 element
signifies a pair of poles on the imaginary axis (no real parts) implying marginalstability.
Another special case is when all the elements in a row become zero. In this casewe may still proceed in constructing the Routh array using the derivative of apolynomial defined using the previous (nonzero) row. If the n-th row is all zero,first form a polynomial of order n 1 in s using the elements in row n 1. Thenobtain the derivative of this polynomial with respect to s, i.e. dds and replace thezero row (the n-th row) with the coefficients of this derivative. The rest of thearray is completed as usual.
3.5 Pole/Zero effects
The location of the closed-loop system poles determines the nature of the systemmodels but the location of the closed-loop zeros determines the proportion inwhich these modes are combined. This can be easily verified via partial fractionexpansions. Poles and zeros far away from the imaginary axis are known as fastpoles and zeros, respectively. Conversely, poles and zeros close to the imaginaryaxis are known as slow poles and zeros. Fast zeros, RHP or LHP, have little to noimpact on system response.
Slow zeros have a significant effect on system response. Slow LHP zeros lead toovershoot and slow RHP zeros lead to undershoot. A lower bound Mu for themaximum undershoot (due to the presence of a RHP zero at s = c) is given by
Mu 1
ects 1 (3.19)where = 0.02 for a 2% settling time ts. From the denominator of the above, itis obvious that fast zeros (large c)lead to a smaller lower bound for the maximumundershoot Mu and vice versa. Alternatively a short settling time ts, implying ahigh bandwidth, would lead to more undershoot. Hence for a given RHP zero,we can only lower ts so much before getting unacceptable undershoot. To avoidundershoot, the closed-loop bandwidth is limited by the magnitude of a RHP zero.We determine the maximum bandwidth acceptable below.
The the approximate 2% settling time is given by ts 4 = 4/a where is thetime constant and a is the real part of the slowest LHP closed-loop system pole.Thus Mu can then be expressed as
Mu 1 e4c/a 1 . (3.20)
Thus if the magnitude of the real part of the slowest LHP closed-loop pole issmaller than the RHP zero, undershoot will remain low since the denominator ofthe above will become large. The converse is true as well. Keep real part of slowestLHP pole less than real part of any RHP zero to avoid undershoot.
The above results are true for LHP zeros as well in an analogous manner but forovershoot instead. Thus, in order to avoid overshoot, we must keep |a| < |c| wherea is the slowest LHP pole and c is the slowest LHP zero.
23
7/27/2019 notes-13106549652706-phpapp02-110714101758-phpapp02
24/105
3.5. Pole/Zero effects
If the magnitude of the real part of the dominant closed-loop poles is less than the
magnitude of the largest unstable open-loop pole, then significant overshoot willoccur. Keep real part of slowest LHP pole greater than real part of any RHP poleto avoid overshoot.
24
7/27/2019 notes-13106549652706-phpapp02-110714101758-phpapp02
25/105
Chapter 4
Frequency response tools
4.1 Frequency response
We consider the input to any transfer function G(s) = B(s)/A(s) to be u(t) =A sin t where A is a constant and is the system frequency. Then it can beshown that the steady-state output is then given by
yss(t) = |G(j)|A sin t + G(j) (4.1)where |G(j)| is simply the magnitude of G(s) when evaluated at j and thephase G(j) is given by
G(j) = B(j)A(j) = tan1 Im B(j)Re B(j)tan1 Im A(j)Re A(j) (4.2)
for all R+. Much useful and generalizable information can be gleaned fromthe above (the frequency response function G(j) or FRF).
4.2 Bode plots
The pair of plots of magnitude |G(j)| vs. frequency and phase G(j ) vs.frequency are collectively known as the Bode plots of G(s). The magnitudeis usually plotted in decibels (dB) and the frequency for both plots is on thelogarithmic scale. The decibel value of the FRF G(j) is given by
G(j) = 20 log10|G(j)| (4.3)and the logarithmic scale value of is log10 . The appropriate values for themagnitude and phase are determined as previously shown.
The benefit of using a logarithmic scale are many fold but most importantly, multi-plication in a linear scale implies addition in the logarithmic scale. Thus, since thepoles/zeros of a transfer function can be expressed as an arbitrarily long multiplica-tion of factors, in the logarithmic scale we can decompose a transfer function intoa summation of elementary transfer functions based on the original poles/zeros.This helps in plotting the function and obtaining fundamental insights into thebehaviour of the plant.
25
7/27/2019 notes-13106549652706-phpapp02-110714101758-phpapp02
26/105
4.2. Bode plots
Example Describe the frequency response of the following closed-
loop transfer function using bode plots
G(s) =45s + 237
(s2 + 3s + 1)(s + 13). (4.4)
The bode plots for the transfer function can be generated using thebode command in MATLAB. These are shown in Figs. (4.1) and (4.2).Figure (4.1) shows the frequency response bode plots on the standardlogarithmic scale and Fig. (4.2) shows the frequency response bodeplots on a linear scale. The benefits of the logarithmic scale are obvi-ous from the figures since they show the response of the system betterwhen compared to the linear scale plots. This is especially true at very
low and very high frequencies where the linear scale response growsasymptotically.
80
60
40
20
0
20
40
Magnitude(dB)
103
102
101
100
101
102
180
135
90
45
0
Phase(deg)
Frequency (Hz)
Figure 4.1: Logarithmic scale bode plot of G(s).
Note that the frequency is shown in Hz and not in rad/sec to make
the linear scale bode plots distinguishable.
Many systems, including control systems, have their performance specified in termsof frequency response criteria. An important one of these is the bandwidth ofthe system. We define it, in general terms, as the frequency range for whichthe magnitude of the transfer function from input to output is close to unity (inabsolute terms) or zero (in dB). This implies that the bandwidth is the frequencyrange for which the system response is close to ideal.
The previous definition can be expressed more exactly for control systems since theynormally behave like low-pass systems. Low-pass systems are systems for whichthe response begins near zero decibels and then rolls off with increasing frequency.
26
7/27/2019 notes-13106549652706-phpapp02-110714101758-phpapp02
27/105
4.3. Gain and phase margins
0
5
10
15
20
Magnitude(abs)
10 20 30 40 50 60 70 80 90 100180
135
90
45
0
Phase(deg)
Frequency (Hz)
Figure 4.2: Linear scale bode plot of G(s).
It is usually the case that the magnitude response does not roll off immediately butrather remains level for some frequency range. For such systems, the bandwidth isthe frequency at which the magnitude has rolled off by 3 dB from its low-frequencylevel value. Another definition which is the used in the rest of these notes is thatthe bandwidth is the real part of the slowest LHP pole. It is commonly the case
that the bandwidth from the two definitions usually closely coincides.
4.3 Gain and phase margins
As has been previously discussed, a system is stable if all of its poles are in the LHP.Otherwise it is unstable. Not all stable systems are the same and some systems aremore stable than others. Thus, we may are faced with the problem of the extentof stability of a system. The concepts of gain and phase margins are useful inthis regard and bode plots in particular are helpful in determining these. It mustbe noted that gain and phase margins are only meaningful for stable closed-loopsystems that become unstable with increasing gain.
Consider a simple stable feedback system with the plant H(s) = B(s)/A(s) andthe compensator given by C(s) = KP(s)/L(s) where K is a constant gain. LetG(s) be the closed-loop transfer function given by
G(s) =H(s)C(s)
1 + H(s)C(s)(4.5)
Then the closed-loop characteristic equation CLCE which is the denominator ofthe closed-loop transfer function can be easily found to be
CLCE(s) = 1 + KH(s)C(s) (4.6)
27
7/27/2019 notes-13106549652706-phpapp02-110714101758-phpapp02
28/105
4.3. Gain and phase margins
where the roots of 1 + KH(s)C(s) are the closed-loop poles of the system. These
are given by the solutions toKH(s)C(s) = 1. (4.7)
Since angles in the complex s-plane are measured in a counterclockwise directionfrom the positive real axis, in polar coordinates, the point 1 lies at an angle 1 = 180 and magnitude | 1| = 1. Thus, if we evaluate the frequency responseof the closed-loop system G(j ), the system will become unstable precisely ata point where we have both G(j) = 180 and |G(j)| = 1. It can alsobe shown that the closed-loop system is also stable for |G(j)| < 1. But sincewe already have a stable system there will be no point where |G(j )| < 1 andG(j) = 180 simultaneously. This point is commonly known as the crossoverfrequency. The gain crossover frequency is when only |G(j )| = 1 or G(j ) = 0is true and the phase crossover frequency is when only
G(j) = 180 is true.It can be seen from the previous that since systems with RHP poles are a priori
unstable, the concepts of phase and gain margins are meaningless.
It follows that we can define the gain and phase margins as how much we willneed to change the system (in terms of magnitude and angle) before we reachinstability. Moreover, we can exploit the bode plots to formulate succinct definitionsof these. Thus, the phase margin is defined as the amount of additional phase lagneeded at the gain crossover frequency which will bring the system to the vergeof instability (i.e. G(j) = 180 or G(j) = +180). Correspondingly, thegain margin is defined as the reciprocal of the magnitude |G(j)| or the negativedecibel magnitude G(j) at the phase crossover frequency. This gain margindetermination is based on a decibel plot since 20 log10 1 = 0.
For minimum-phase systems, the phase margin must be negative for stability. Al-ternatively, we can use G(j ) = 180 as the stability criterion since it refers tothe same angle in the complex s-plane. In this case, for minimum-phase systems,the phase margin must be positive for stability.
The gain margin describes the maximum multiple of the gain K that can be appliedin feedback before the system becomes unstable. A gain margin in decibels thatis positive implies that the system is stable and conversely, a negative decibel gainmargin implies instability of the underlying system.
For a stable minimum-phase system, the gain margin indicates how much wecan increase the gain before the onset of instability. Conversely for an unstableminimum-phase system, it indicates how much we must decrease gain to regainstability. However, since an unstable system would yield a negative decibel value,this implies 0 < K < 1. This is not a feasible control gain for most systems andtherefore is not a meaningful measure of instability for many unstable systems.
For systems that never approach the phase crossover frequency, the gain margin iseither or indicating that the system is stable for all gains or unstable forall gains, respectively. Furthermore, the system may have more than one crossoverfrequency indicating that the system is stable only for gain values within a certainrange. For stable systems with more than one gain crossover frequency, the phasemargin is measured at the highest gain crossover frequency.
For nonminimum-phase system or systems with undefined phase/gain margins, thebest recourse is to use the Nyquist stability criterion.
28
7/27/2019 notes-13106549652706-phpapp02-110714101758-phpapp02
29/105
4.4. Phase margin and second-order systems
4.4 Phase margin and second-order systems
For a strict canonical second-order closed-loop system, the phase margin is relatedto the damping ratio, . We must be careful to make sure we have a true second-order closed-loop system before using the following results. The second-orderclosed-loop transfer function CLTF(s) is given by
CLTF(s) =2n
s2 + 2ns + 2n(4.8)
and the related second-order open-loop transfer function OLTF(s) is given by
OLTF(s) =2n
s(s + 2n). (4.9)
The phase margin for this open-loop transfer function in closed-loop with gain Kcan then be related to as follows
Phase margin = tan1
21 + 44 22
(4.10) 100 for 0 < Phase margin < 70 (4.11)
The gain crossover frequency gc for such a second-order system can also bedetermined as
gc = n1 + 44 22 (4.12)This allows us to determine the required gain crossover for a specified percentovershoot (since percent overshoot can be used to determine ).
The bandwidth, BW of the system is given by
BW = n
1 22 +
44 42 + 2 (4.13)
It can also be shown for the above system that gc BW 2gc.Since the time constant = 1/BW, a higher bandwidth implies a faster response(smaller time constant). It also allows us to specify BW in terms of and de-termine the corresponding range of gc. We can use this and the previous resultto design a system in terms of phase margins and crossover gains using specified
design requirements.
4.5 Root-locus
The basic characteristics of the transient response of a system are closely relatedto pole locations. Pole locations depends on the value of the loop gain in a simplefeedback setting where the compensator is a constant gain. Hence, it is becomesimportant to know how the closed-loop poles move in the complex s-plane as thegain is varied. Once the desired poles are determined using previously discussedtechniques, the design problem then only involves determining the appropriate gain
29
7/27/2019 notes-13106549652706-phpapp02-110714101758-phpapp02
30/105
4.5. Root-locus
to place the system poles at their desired locations. In many cases, simple gain
will not work and we would need to add a more complex compensator.Root-locus addresses the design problem when dealing with adjusting a simpleparameter (such as a gain but could be otherwise). It was developed by W. R.Evans and involves plotting the roots of the characteristic equation of the closed-loop system for all values (0 to ) of an adjustable system parameter that isusually the loop gain. Root-locus means the locus of roots of the characteristicequation.
Consider a simple feedback system with plant H(s) and compensator C(s). Theclosed-loop transfer function G(s) is then given by
G(s) =H(s)C(s)
1 + H(s)C(s). (4.14)
The characteristic equation is the denominator of the above equated to 0 and itsatisfies the following
H(s)C(s) = 1. (4.15)We can express this in the polar form as
H(s)C(s) = 180 |H(s)C(s)| = 1. (4.16)Only the values of s that satisfy the above satisfy the characteristic equation andit follows that these are the poles of the closed-loop transfer function G(s).
Let the H(s)C(s) have poles at p1, . . . , pn and zeroes at z1, . . . , zm. Then theangle at a given s maybe determined using the following
H(s)C(s) = z1 + . . . +zm
p1
. . .
pn (4.17)
where the angle of an arbitrary zero/pole x is given by x = tan1(Im x/Re x).The magnitude of any complex number x is given by |x| = Re x + Im x. Thiscan be used to determine |H(s)C(s)|.
Angles are measured counterclockwise from the positive real axis. Root-loci are symmetric about the real-axis, due to the presence of complex
conjugates.
If the difference between the orders of the numerator and denominator ofH(s)C(s) is greater or equal to two, then the sum of the poles is a constant.This implies that if some poles move toward the right, others have to move
toward the left. A slight change in pole-zero configurations may cause significant changes in
the root-locus.
The patterns of the root-loci depend only on the relative separation of theopen-loop poles and zeros.
If a pole in the root-locus plot only moves over into the RHP (implyinginstability) or LHP for a fixed bounded interval of the gain, then the systemis called conditionally stable. It is not desirable in a control system sincethe danger always exists of becoming unstable/stable by both increasing thegain too much or decreasing the gain too much.
30
7/27/2019 notes-13106549652706-phpapp02-110714101758-phpapp02
31/105
4.5. Root-locus
If the construction of G(s) involved a cancellation of poles with zeros be-cause of the interaction between the plant and compensator, all the rootsof the true characteristic equation will not show (since we are dealing witha reduced equation). To avoid this problem, add the canceled closed-looppole retroactively to the closed-loop poles obtained from the root-locus plotof G(s). This implies that the canceled pole is still a pole of the system butis only canceled in feedback (or it is available after feedback).
Example For the feedback system shown in Fig. (4.3) with
H(s) =1
s(s + 1)2(4.18)
find the root-locus plot and the gain values that ensure the system
R(s)
+
-
U(s) Y(s)
K H(s)
Figure 4.3: Simple gain feedback system.
stable.
The root-locus plot for this transfer function can be approximatelydrawn by hand or plotted using the rlocus command in MATLAB asshown in Fig. (4.4). The two poles and their movement with increas-
Real Axis
ImaginaryAxis
2 1.5 1 0.5 0 0.5
1
0.5
0
0.5
1
0.160.340.50.640.760.86
0.94
0.985
0.160.340.50.640.760.86
0.94
0.985
0.250.50.7511.251.51.75
Figure 4.4: Root-locus plot for H(s).
31
7/27/2019 notes-13106549652706-phpapp02-110714101758-phpapp02
32/105
4.6. Nyquist stability criterion
Real Axis
ImaginaryAxis
0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0 0.1 0.2
0.2
0
0.2
0.4
0.6
0.8
1
1.2
System: sysGain: 2Pole: 0.000468 + 1iDamping: 0.000468Overshoot (%): 100Frequency (rad/sec): 1
0.120.240.380.5
0.64
0.76
0.88
0.97
0.97
0.2
0.4
0.6
0.8
1
1.2
0.2
Figure 4.5: Maximum stabilizing gain for closed-loop system.
ing gain is indicated on the plot. The stable pole at s = 1 does notbecome unstable for any value of K. However, the marginally stablepole at s = 1 does cross the imaginary axis to become unstable forsome value of K. This maximum value of the gain is shown in Fig.(4.5). Thus for any gain value K > 2, the system becomes unstable.
4.6 Nyquist stability criterion
This is a helpful tool that is useful for many kinds of systems including timedelay systems and robust stability. Given a closed-loop transfer function G(s), wewant to determine closed-loop stability/instability and also the number of unstableclosed-loop poles.
Nyquist plots are obtained by plotting G(j) for all on the complex plane (realvs. imaginary). The direction of the plotted line is also indicated in terms ofincreasing . These can usually be done with the aid of bode plots by reading offvalues of magnitude/phase for a certain frequency from the bode plots and thenplotting these points in the complex plane using polar coordinates (i.e. magnitudeand direction/angle). Angles are measured in a counterclockwise manner from thepositive real axis. The Nyquist plot is symmetric about the real axis due to thepresence of complex conjugates.
The number of unstable poles N is then given by the equation
N = NCW + NOL (4.19)
where NOL is the number of open-loop unstable poles and NCW is the number ofclockwise encirclements of the point 1/K by the Nyquist plot. The variable Kis an independent gain on the plant and is usually considered 1 when the Nyquist
32
7/27/2019 notes-13106549652706-phpapp02-110714101758-phpapp02
33/105
4.6. Nyquist stability criterion
plot is not being used for design purposes. A counterclockwise encirclement is the
same as a negative clockwise encirclement.
Example Consider the simple feedback system shown in Fig. (4.6).Given
C(s) G(s)
R(s)
+
-
U(s) Y(s)
Figure 4.6: Block diagram of simple single degree of freedom feedback system.
G(s) =3
s 1 , C(s) =K
s + 3(4.20)
where K is a gain to be determined, find the appropriate Nyquist plotand comment on the stability of the closed loop system.
Since Nyquist plotting requires an independent gain on the plant, werearrange and manipulate the feedback system to obtain the closed-loop transfer function as
GCL(s) = KH(s) = K3
(s + 3)(s 1) . (4.21)
The corresponding block diagram is shown in Fig. (4.7). The bode
R(s)
+
-
U(s) Y(s)
K H(s)
Figure 4.7: Block diagram of feedback system manipulated for generating theNyquist plot.
diagram is then plotted as in Fig. (4.8) and values at relevant pointsare picked out in order to make the Nyquist plot. Typical points to getthe angle/magnitude of the frequency response are when the angle isat multiples of 90. A more complex Nyquist plot would require morepoints to get an accurate representation. The corresponding Nyquistplot is shown in Fig. (4.9) with the directions put in according toincreasing frequency.
It is clear from the expression of H(s) that we have 1 unstable open-loop pole at s = 1, i.e. NOL = 1. From the Nyquist plot we have 1
33
7/27/2019 notes-13106549652706-phpapp02-110714101758-phpapp02
34/105
4.6. Nyquist stability criterion
80
60
40
20
0
Magnitude(dB)
102
101
100
101
102
180
175
170
165
160
155
150
Phase(deg)
Frequency (rad/sec)
Figure 4.8: Bode plot of closed-loop system.
1.51.41.31.21.1 1 0.90.80.70.60.50.40.30.20.1 0 0.1 0.2 0.3 0.4 0.50.4
0.3
0.2
0.1
0
0.1
0.2
0.3
0.4
Real Axis
ImagAxis
Figure 4.9: Nyquist plot of closed-loop system.
counterclockwise encirclement or -1 clockwise encirclements for 1 11 if K < 1
(4.23)
34
7/27/2019 notes-13106549652706-phpapp02-110714101758-phpapp02
35/105
4.6. Nyquist stability criterion
In other words, any gain greater than 1 ensures stability of the closed-
loop system.
When there is a pole at the origin or anywhere else on the imaginary axis, theNyquist plot will become singular which leads to a problem of counting the encir-clements. This problem is countered by evaluating G(s) at a point which is notsingular but is very close to the singular point. If the singular point is given by sj,then the point close to it is usually taken to be + sj, where is an arbitrarilysmall positive real number as shown in Fig. (4.10).
Figure 4.10: s-plane showing path taken to determine how symmetric singularitiesjoin when making Nyquist plots.
This point is then located on the plot and is made arbitrarily large in magnitude(tending to ) which helps indicate in which direction the singular points join atinfinite distance.
Example Consider a feedback system similar to the one shown in
Fig. (4.7) with closed-loop transfer function
GCL(s) = KH(s) = K1
s(s + 1)2. (4.24)
where K is a gain to be determined. Find the appropriate Nyquist plot.
The bode diagram is then plotted as in Fig. (4.11) and values at rele-vant points are picked out in order to make the Nyquist plot. Typicalpoints to get the angle/magnitude of the frequency response are whenthe angle is at multiples of 90. A more complex Nyquist plot wouldrequire more points to get an accurate representation.
35
7/27/2019 notes-13106549652706-phpapp02-110714101758-phpapp02
36/105
4.6. Nyquist stability criterion
60
40
20
0
20
Magnitude(dB)
101
100
101
270
225
180
135
90
Phase(deg)
Frequency (rad/sec)
Figure 4.11: Bode plot of closed-loop system.
Since this transfer function has a pole on the imaginary axis at s = 0,we do not evaluate GCL(j0) but instead evaluate at GCL( + j0)where is an arbitrarily small number. This is in order to determinethe asymptotic direction of the closed contour of the Nyquist plot. Thecorresponding Nyquist plot with directions is shown in Fig. (4.12).
2 0 2 4 6 8
10
5
0
5
10
Real Axis
ImagAxis
Figure 4.12: Nyquist plot of closed-loop system.
The stability of the closed-loop system maybe determined as before
36
7/27/2019 notes-13106549652706-phpapp02-110714101758-phpapp02
37/105
4.7. Feedback with disturbances
using the Nyquist plot.
4.7 Feedback with disturbances
Consider a single degree of freedom feedback system (shown below) with inputdisturbance Di (disturbance between the compensator C(s) output U(s) and theinput of the plant G(s)), output disturbance Do (disturbance in the plant output)and measurement noise/disturbance Dm. Let the system input be R(s).
C(s) G(s)
R(s)
+
-
D
+
+ +
+
+
+
D
D
U(s)
i o
m
Y(s)
Figure 4.13: Block diagram of a single degree-of-freedom feedback system with
disturbances.
For such a system, we can write the following two functions
Y(s) = T(s)R(s) + S(s)Do(s) + Si(s)Di(s) T(s)Dm(s) (4.25)U(s) = Su(s)R(s) + Su(s)Do(s) T(s)Di(s) Su(s)Dm(s) (4.26)
where S(s) is the sensitivity function, T(s) is the complementary sensitivity func-tion, Si(s) is the input-disturbance sensitivity function and Su(s) is the controlsensitivity function. These are given by the following relations
T(s) =G(s)C(s)
1 + G(s)C(s)
(4.27)
S(s) =1
1 + G(s)C(s)(4.28)
Si(s) =G(s)
1 + G(s)C(s)= G(s)S(s) (4.29)
Su(s) =C(s)
1 + G(s)C(s)= C(s)S(s) (4.30)
We can use the above to derive transfer functions between any input/output pair.Furthermore, we can independently assess the stability of each input/output pairby evaluating the relevant transfer function.
37
7/27/2019 notes-13106549652706-phpapp02-110714101758-phpapp02
38/105
4.7. Feedback with disturbances
Example Find the closed-loop sensitivity functions for a closed-loop
system with plant transfer function
G(s) =3
(s + 4)(s + 2) (4.31)
and compensator
C(s) =s + 2
s. (4.32)
Also comment on the stability of the system.
Since G(s) = B(s)/A(s) and C(s) = P(s)/L(s)
B(s) = 3 A(s) = (s + 4)(s + 2) P(s) = s + 2 L(s) = s(4.33)
which gives us
T(s) =GC
1 + GC=
BP
AL + BP=
3
s + 7(4.34)
S(s) =1
1 + GC=
AL
AL + BP=
s(s + 4)
s2 + 4s + 3(4.35)
Su(s) = SC =(s + 4)(s + 2)
s2 + 4s + 3(4.36)
Si(s) = SG =3s
(s2 + 4s + 3)(s + 2) . (4.37)
All the above closed-loop transfer functions are stable except for theinput-disturbance Si(s) since it has a positive pole. Thus, the input-
disturbance to output path is not stable and therefore the entire systemis unstable.
As can be seen, the complementary sensitivity function T(s) is the basic transferfunction from the input R(s) and the output Y(s). Thus, for good tracking weneed T(s) 1. But as can be seen from the first function for Y(s), this increasesthe measurement noise Dm. The sensitivity on the other hand is the transferfunction from the output disturbance Do(s) to the output Y(s). Moreover theS(s) sensitivity function is directly related to the input sensitivity Si(s) and thecontrol sensitivity Su(s), both of which we want to reduce to as low as possible.Therefore, we want S(s) 0 and T(s) 1. This is both possible and is actuallya constraint on the system as it can be easily shown that
T(s) + S(s) = 1 (4.38)
But as mentioned earlier, T(s) 1 amplifies measurement noise. If T(s) = 1(and thus S(s) = 0) for all frequencies , then the system has infinite bandwidth(fast response). However, it amplifies the measurement noise at all frequencieswhich is even more noticeable at high frequencies since measurement noise isusually significant at higher frequencies. Therefore, having a high bandwidth isnot necessarily something desirable from a control design standpoint.
Infinite bandwidth leads to high measurement noise because T(s) = 1 .
38
7/27/2019 notes-13106549652706-phpapp02-110714101758-phpapp02
39/105
4.8. Trends from Bode & Poissons integral constraints
In real systems, T(s) cannot be 1 for all frequencies and rolls off at some finite
bandwidth frequency.
The bandwidth is defined as BW = 1/ where is the time constant of theslowest LHP pole or in an alternate definition is the 3 dB point on a bodemagnitude plot.
When the true plant transfer function is not available, we proceed with ouranalysis using the nominal plant transfer function G0(s). In this case thesensitivity functions remain the same but with G0(s) instead ofG(s). Thuswe have T0(s), S0(s), Si0(s) and Su0(s).
For a plant G(s) = B(s)/A(s) and a compensator C(s) = P(s)/L(s), theclosed-loop characteristic Acl is as before and is the denominator of all the
sensitivity functions aboveAcl = AL + BP = 0 (4.39)
We need all the sensitivity functions to be stable for stability, i.e. we needall the roots of Acl to be in the LHP.
This is only true if there is no cancellation of unstable poles between C(s)and G(s). Canceling unstable poles is not recommended since we will neverhave a perfect model and this will cause us to end up with a nonminimum-phase zero instead of canceling the unstable pole. Moreover, this will resultin a RHP zero and pole very close to each other and this leads to muchhigher instability as will be seen later.
4.8 Trends from Bode & Poissons integral constraints
Consider the case when we have no open-loop RHP planes or zeros. Then forstability, the following is satisfied
0
ln|S(j)| d =
0 d > 0k 2 d = 0
(4.40)
where k = lims sG(s)C(s) and d is the time delay in the system. Thisis the first of Bodes integral constraints on sensitivity. The next equation forcomplementary sensitivity also needs to be satisfied for stability
0
ln
Tj 1 d 1 = d 2kr (4.41)
where k1r = lims 1/sG(s)C(s). Since an integral is the area under a graph,the above signify how much of the graph of T(j) and S(j ) needs to be aboveor below the 0 axis. Upon inspection of the equations, it can be seen that timedelay causes a more positive integral, leading to the fact that time delays causeboth T(j) and S(j) to need to move more above the 0 axis for stability (tosatisfy the more positive integrals). This is undesirable as mentioned before andtherefore, time delays are undesirable.
39
7/27/2019 notes-13106549652706-phpapp02-110714101758-phpapp02
40/105
4.8. Trends from Bode & Poissons integral constraints
Consider the case when we have N open-loop RHP (unstable) poles p1, . . . , pN
and no open-loop RHP zeros. Then for stability, the following needs to be satisfied0
ln|S(j)| d = N
i=1 Re{pi} nr > 1
k 2
+ n
i=1 Re{pi} nr = 1(4.42)
where nr is the relative degree of the open-loop system (difference between ordersof numerator and denominator of a proper transfer function). This is the second ofBodes integral constraints on sensitivity. It is obvious from the above that havinglarger RHP poles leads to a more positive sensitivity integral, which is somethingundesirable because it pushes S(s) above the 0 axis causing peaks and increasedsensitivity at certain frequencies. An equation for the integral of the complementarysensitivity is not available.
Consider the case when we have M open-loop RHP (nonminimum-phase) zerosc1, . . . , cM and no RHP poles. For this case, there is no integral available for S(j)but the following must be satisfied for stability
0
ln
Tj 1 d 1 = d 2 +
Mi=1
1
ci
2kr. (4.43)
It can be seen from the above that RHP zeros close to the imaginary axis makethe integral more positive (since 1/ci becomes large) leading to a larger area abovethe 0 axis. This usually implies poor tracking and overshoot in certain frequencyranges and is undesirable. Time delay also makes the integral more positive and isundesirable.
Consider the case when we have N RHP poles p1, . . . , pN and M RHP zerosc1, . . . , cM. Let the k-th pole be given by pk = k + jk and the k-th zero byck = k +jk. The the following must be satisfied for stability
ln|S(j)|
k2k + (k )2
d = ln
Ni=1
ck pick +pi
for k = 1, . . . , M (4.44)
where a superscripted signifies the complex conjugate. A similar expression canbe derived for the complementary sensitivity function
ln|T(j)| k2k + (k )2
d = ln Mi=1
pk cipk + ci
+ dkfor k = 1, . . . , N (4.45)
where the complex conjugate is indicated as before. The above two are knownas Poissons integral constraints on sensitivity and complementary sensitivity, re-
spectively. Since lnNi=1 ckpick+pi < 0 and ln Mi=1 pickpi+ck < 0, the integrals will
in general be positive. Thus, having a RHP pole and a RHP zero close to eachother would make the denominators of the right hand-side small, leading to largepositive integrals. This implies the presence of large peaks and significant areas
40
7/27/2019 notes-13106549652706-phpapp02-110714101758-phpapp02
41/105
4.8. Trends from Bode & Poissons integral constraints
above the 0 axis for both sensitivity functions. This is undesirable and therefore,
we must avoid having a RHP pole and RHP zero close to each other.The Poisson integral constraints containing a weighting term that concentratesthe frequency response in a certain frequency band. Thus, the integral effects aremore pronounced so we need to make a positive integral in a more or less finitefrequency rather than the infinite frequency afforded to the previous integrals.
What we want:
We want to avoid peaks in T(j) above 0 since this would imply that wehave overshoot, poor tracking and a higher measurement noise amplificationin a certain frequency range.
Similarly, we want to avoid peaks in S(j) above 0 because this implies thatwe have an increased sensitivity to disturbances in a certain frequency range.
Summary of trends:
We have a water-bed effect in both S(j) and T(j) even when we have noRHP poles or zeros but the integral is negative so it is easier to deal with.
The presence of time delays introduces (higher) peaks in both S(j)and T(j ) since the integrals are not necessarily negative anymore andbecome more positive. In the case of S(j), the integral becomes zero(4.40) and in the case of T(j) the integral can range from a smallnegative to a large positive (4.41).
The presence of only RHP poles makes the water-bed effect worse since it
makes the integral for sensitivity S(j) more positive (4.42).
Larger real parts of RHP poles are undesirable because they lead to aa higher sensitivity peak because of a more positive integral.
A relative degree higher than 1 is undesirable since it eliminates a helpfulnegative term in the integral expression.
The presence of only RHP zeros, in general, makes the water-bed effect worsesince the integral for T(j ) has more positive terms than negative (4.43).
Smaller real parts of RHP zeros are undesirable because they lead toa higher sensitivity peak because the reciprocal of the zeros makes theintegral more positive.
Time delays are also undesirable since they introduce another positiveterm in the integral.
In the presence of both RHP zeros and poles, water-bed effect is most no-ticeable [(4.44) and (4.45)].
Having a RHP pole and RHP zero close to each other is undesirablesince it greatly increases the integral value for both S(j) and T(j)leading to large peaks in both. This is why we avoid canceling a RHPpole.
The integral is more pronounced in this case because our frequency isconcentrated in a finite band.
41
7/27/2019 notes-13106549652706-phpapp02-110714101758-phpapp02
42/105
4.9. Upper bounds on peaks for sensitivity integrals
4.9 Upper bounds on peaks for sensitivity integrals
Define the weighting functions used in the Poisson integral constraint on sensitivity
W(ck, ) =k
2k + (k )2(4.46)
Then the integral of the weighting function is given as
(ck, c) 2c0
W(ck, ) d (4.47)
= 2 tan1
c kk
+ 2 tan1
kk
(4.48)
We can use this to split the integration limits using the fact (ck, ) = .Lets say we want to limit S(j) to a low value for a certain range of frequency. We may want to do this because disturbances are significant in that frequencyrange or because most of the response will be in that frequency range. From ourprevious discussion, this is not possible without a penalty which will be in the formof a peak in the sensitivity function.
Let us assume we want to limit S(j) to a small number between the frequencies0 and l. We can then use our previous results to split the integration limits ofthe Poisson integral constraints to get an expressions for a lower bound on themaximum peak in S(j )
ln|S(j )max| > ln Ni=1 ckpick+pi + |(ln)(ck, l)| (ck, l) (4.49)We can use this to determine the lower bound on the complementary sensitivityfunction since T(s) + S(s) = 1.
Closed-loop bandwidth should not exceed the magnitude of the smallest RHPopen-loop zero. The penalty for not following this guideline is that a verylarge sensitivity peak will occur leading to fragile (nonrobust) loops and largeundershoots/overshoots.
The lower bound on the complementary sensitivity peak is larger for systemswith time delay and influence of delay increases for fast unstable poles.
If closed-loop bandwidth is much smaller than RHP pole, we will have largecomplementary sensitivity peak and thus large overshoot.
42
7/27/2019 notes-13106549652706-phpapp02-110714101758-phpapp02
43/105
Chapter 5
Frequency domain control design
5.1 Direct pole-placement
This involves placing the poles of the closed-loop characteristic equation (CLCE orAcl) at desired locations. Let the plant transfer function be proper and given byH(s) = B(s)/A(s) and the compensator transfer function by C(s) = P(s)/L(s).It can then be shown that the closed-loop characteristic equation for this onedegree-of-freedom system is equivalent to the following
Acl = A(s)L(s) + B(s)P(s) (5.1)
where the polynomial order of A(s) (denominator of the plant transfer function)is n.
1. Construct a desired closed-loop characteristic equation Acld based on designrequirements such as response time and overshoot.
To cancel a stable pole in the plant transfer function through the com-pensator, just ignore that pole in all calculations (both in compensatoras well as plant).
2. To obtain the compensator C(s) coefficients, find the needed order of P(s)and L(s).
If the polynomial degree of Acld is given by nc = 2n 1, then Aclwill exist for a biproper compensator with polynomial degree np =
nl = n 1 where np is the polynomial order of P(s) and nl is thepolynomial order of L(s). If the polynomial order of Acl,d is given by nc = 2n 1 + where is
a positive integer, then we can use the same order of P(s) but we willhave to change the order of L(s) to be nl = n 1 + .
If nc < 2n 1, then we have more equations than unknowns and mostlikely there is no solution.
3. Form general equations for P(s) and L(s) in terms of unknown variables andanalytically determine Acl from
Acl = A(s)L(s) + B(s)P(s). (5.2)
43
7/27/2019 notes-13106549652706-phpapp02-110714101758-phpapp02
44/105
5.1. Direct pole-placement
4. Compare the coefficients of this polynomial to the coefficients of Acl,d to
obtain the compensator coefficients.
Usually we can determine the compensator by following intuition rather than thestrict rules mentioned above.
Example Consider the system shown in Fig. (5.1) with the planttransfer function given by
C(s) G(s)
R(s)
+
-
U(s) Y(s)
Figure 5.1: Block diagram of feedback system.
G(s) =B(s)
A(s)=
1
s2 + 3s + 1. (5.3)
Find a suitable compensator C(s) = P(s)/L(s) that places the polesof the closed-loop system at 10, 3 4j.
We follow the steps outlined earlier.
1. Since the desired closed-loop poles are given, the desired closed-loop characteristic equation is given by
Acl,d = (s + 10)(s + 3 + 4j)(s + 3 4j) (5.4)= s3 + 16s2 + 85 + 250 (5.5)
2. The orders of P(s) and L(s) are now determined. The order ofA(s) is n = 2, thus nc = 2n 1 = 3. Since order of the Acl,d isalso 3, the compensator will be biproper with polynomial degreenp = n 1 = 1. Thus, let
C(s) =P(s)
L(s)=
b1s + b0s + a0
(5.6)
where a0, b0, b1 are coefficients to be determined. This is usuallythe most straightforward choice for a compensator. The com-pensator is limited to three variables to avoid more unknownsthan equations since Acl,d is of order three. This may also bedetermined via trial-and-error.
3. Form a general equation for Acl using C(s) as specified before
Acl = A(s)L(s) + B(s)P(s) (5.7)
= (s2 + 3s + 1)L(s) + (1)P(s) (5.8)
= s3 + (3 + a0)s2 + (1 + 3a0 + b1)s + (ao + b0). (5.9)
44
7/27/2019 notes-13106549652706-phpapp02-110714101758-phpapp02
45/105
5.2. Modeling errors
4. Comparing coefficients of Acl and Acl,d
3 + a0 = 15 (5.10)
1 + 3a0 + b1 = 85 (5.11)
ao + b0 = 250 (5.12)
which gives
a0 = 13 (5.13)
b0 = 237 (5.14)
b1 = 45. (5.15)
Thus the compensator C(s) that places the poles of the closed-loop
system at 10 and 3 4j is given byG(s) =
P(s)
L(s)=
45s + 237
s + 13(5.16)
5.2 Modeling errors
Let the nominal plant transfer function be given by G0(s) and the actual planttransfer function by G(s). How can we describe the difference between the nominaland actual plant model? There are two methods:
The additive modeling error (AME) G(s) is given in the equation
G(s) = G0(s) + G(s) (5.17)
and is an absolute measure of uncertainty.
The multiplicative modeling error (MME) G(s) is given in the equation
G(s) = G0(s) [1 + G(s)] (5.18)
and is a scaled (relative to the nominal transfer function) measure of uncer-tainty.
5.3 Robust stability
If the model used for control design is not the actual transfer function G(s) butrather a nominal model G0(s) (which is usually the case) and we know the stabilityproperties of the nominal closed-loop system, we can derive a test for the stabilityproperties of the true closed-loop system.
Assume that the nominal compensator-plant transfer function C(s)G0(s) is stable,i.e. number of unstable poles N = 0. Also assume that the open-loop transferfunctions of both G(s) and G0(s) have the same number of unstable poles, i.e.number of open-loop unstable poles NOL is the same for both nominal and trueplant transfer functions.
45
7/27/2019 notes-13106549652706-phpapp02-110714101758-phpapp02
46/105
5.3. Robust stability
By the Nyquist stability criterion
N = NOL + NCW (5.19)
where, in the case of the nominal compensator-plant transfer function, N = 0 andNOL is the same for both nominal and true systems. Thus, to ensure stability ofthe true system, it is sufficient to ensure that the clockwise encirclements madeby the Nyquist plot of the true compensator-plant transfer function is the sameas the clockwise encirclements made by the nominal compensator-plant transferfunction. In other words, if C(s)G(s) does not make any more encirclements of -1than C(s)G0(s) then the true closed-loop system is stable as well.
Consider the Nyquist sketch of C(j)G0(j). Then the maximum uncertaintyat any point in the sketch in terms of the multiplicative modeling error (MME)G(j) is given by
|C(j)G0(j) C(j)G(j)| = |C(j)[G0(j) G0(j) G0(j)G(j)]|(5.20)
= |C(j)G0(j)G(j)|. (5.21)
This can be represented by a circle of radius |C(j)G0(j)G(j)| around theNyquist sketch of C(j)G0(j). The distance from the center of the circle(C(s)G0(s)) to the -1 point can be found to be
| 1 C(j )G0(j )| = |1 + C(j)G0(j)| (5.22)
as illustrated in Fig. (5.2).
Figure 5.2: Plot showing the robust stability condition. Note s = j .
Thus, as long as this distance is more than the radius of the uncertainty circle, the
46
7/27/2019 notes-13106549652706-phpapp02-110714101758-phpapp02
47/105
5.4. Robust performance
system maintains the same number of encirclements. This is given by
|C(j)G0(j)G(j )| < |1 + C(j)G0(j)|, (5.23)
G(j) C(j)G0(j)1 + C(j)G0(j)
< 1, (5.24) |T0(j)G(j)| < 1, . (5.25)
The above boxed constraint is a sufficient (but not necessary) condition for robuststability. An algebraic derivation is available for this as well.
5.4 Robust performance
We can show robust stability as above but what about the performance of anominal system compared to the true system? Can we derive a test or measure ofperformance robustness?
It can be easily shown that the true sensitivity functions are related to the nominalsensitivity functions by the following expressions
T = T0(1 + G)S (5.26)
S = S0S (5.27)
Si = Si0(1 + G)S (5.28)
Su = Su0S (5.29)
where S is known as the error sensitivity function and is given by
S =1
1 + T0G. (5.30)
From the expressions for the nominal sensitivity functions, it can be seen thatS 1 implies that the nominal sensitivity functions are close to the true sensitivityfunctions. This would in turn lead to true performance matching the nominalperformance since all transfer functions would be roughly equivalent.
It can be easily seen from the expression for S that as T0G 0, S 1.Thus, for robust performance we require
T0G 0 or |T0G| 1 (5.31)
Since modeling is typically better at lower frequencies, G 0 for low frequenciesis usually true. On the other hand, having a finite bandwidth implies that T0 0for some high frequency since T0 is expected to roll off beyond the bandwidthfrequency. Thus, for a properly designed control system the robust performancerequirement T0G 0 is possible even though both T0 and G may not be smallat the same time.
This exposes another drawback of having very aggressive control or infinite band-width; that robust performance is not guaranteed at all frequencies.
47
7/27/2019 notes-13106549652706-phpapp02-110714101758-phpapp02
48/105
5.5. Internal Model Principle
Bandwidth must be limited based on response of G to maintain robust
performance: T0G 0.It can also be seen from the above equations that robust performance is a muchstricter requirement than robust stability, confirming intuitive notions.
5.5 Internal Model Principle
Let f(s, 0) represent a function of the initial conditions. Then we can have thefollowing models of disturbances;
Constant/step disturbance, d = 0. Then the transfer function of the distur-bance D(s) is given by
D(s) =f(s, 0)
s(5.32)
Sinusoidal disturbance, d(t) = A sin d + d. Then D(s) is given by
D(s) =f(s, 0)
s2 + 2d(5.33)
Mixed constant/step and sinusoidal disturbance, d(t) = A0 + A sin d + d.Then D(s) is given by
D(s) =f(s, 0)
s(s2 + 2d)(5.34)
The denominator of the disturbance transfer function is called the disturbancegenerating polynomial. Assume the closed-loop since is sta