National Geodetic Survey...use raw accelerometer and gyro data to obtain free-inertial navigation...
17
5.1 Theoretical Fundamentals of Inertial Gravimetry, C. Jekeli, OSU Airborne Gravity for Geodesy Summer School , 23-27 May 2016 V. Theoretical Fundamentals of Inertial Gravimetry • Basic gravimetry equation • Essential IMU data processing for gravimetry • Kalman filter approaches • Rudimentary error analysis – spectral window • Instrumentation National Geodetic Survey
Transcript of National Geodetic Survey...use raw accelerometer and gyro data to obtain free-inertial navigation...

5.1 Theoretical Fundamentals of Inertial Gravimetry, C. Jekeli, OSU Airborne Gravity for Geodesy Summer School , 23-27 May 2016
V. Theoretical Fundamentals of Inertial Gravimetry • Basic gravimetry equation • Essential IMU data processing for gravimetry • Kalman filter approaches • Rudimentary error analysis – spectral window • Instrumentation
National Geodetic Survey

5.2 Theoretical Fundamentals of Inertial Gravimetry, C. Jekeli, OSU Airborne Gravity for Geodesy Summer School , 23-27 May 2016
Inertial Gravimetry
• Use precision accelerometer triad, instead of gravimeter
− OTF (off-the-shelf) units designed for inertial navigation rather than gravimetry
• Usually consider strapdown mechanization, instead of stabilized platform
• Vector gravimetry, instead of scalar gravimetry
− determine three components of gravity in the n-frame
• Need precision gyroscopes to minimize effect of orientation error on horizontal components
• Two documented approaches of data processing
− either integrate accelerometer data or differentiate GPS data

5.3 Theoretical Fundamentals of Inertial Gravimetry, C. Jekeli, OSU Airborne Gravity for Geodesy Summer School , 23-27 May 2016
• Recall strapdown mechanization
ba – inertial accelerations measured by accelerometers in body frame
ix – kinematic accelerations obtained from GPS-derived positions, x, in i-frame.
GPS transformation from inertial frame to n-frame
transformation from body frame to inertial frame gyros
accelerometers
Gravitational Vector in n-frame ( )n n i i b
i b= −C Cg x a
◦ where is the data interval, e.g., δt = 1/50 s 1k kt t tδ −= −
− accelerometer data typically are ( )1
k
k
t
bk
t
t dtδ−
= ∫v a b kk t
δδ
⇒ ≈va (e.g.)
better approximations can be formulated
Direct Method

5.4 Theoretical Fundamentals of Inertial Gravimetry, C. Jekeli, OSU Airborne Gravity for Geodesy Summer School , 23-27 May 2016
Determination of (1) ibC
• Let eζ be the unit vector about which a rotation by the angle, ζ, rotates the b-frame to the i-frame ζ
ζe
3b
2b
1b ( ) ( )
( ) ( )( ) ( )
2 2 2 21 2 3 4 2 3 1 4 2 4 1 3
2 2 2 22 3 1 4 1 2 3 4 3 4 1 2
2 2 2 22 4 1 3 3 4 1 2 1 2 3 4
2 22 22 2
ib
q q q q q q q q q q q qq q q q q q q q q q q qq q q q q q q q q q q q
+ − − + − = − − + − + + − − − +
C
− this is a linear D.E. with no singularities
• Quaternions satisfy the differential equation: 12
ddt
= Aq q
1 2 3
1 3 2
2 3 1
3 2 1
00
00
ω ω ωω ω ωω ω ωω ω ω
− − = − − − −
A− where and 1
2
3
gyro databib
ωωω
= =
ω
bcd
ζ
=
e
( )( )( )( )
1
2
3
4
cos 2sin 2sin 2sin 2
qb qc qd q
ζζζζ
= =
q→ quaternion vector:

5.5 Theoretical Fundamentals of Inertial Gravimetry, C. Jekeli, OSU Airborne Gravity for Geodesy Summer School , 23-27 May 2016
• Solution to D.E., if A is assumed constant,
− using gyro data, typically given as 1
k
k
tb
k ibt
dtδ−
= ∫θ ω
− where 1
k
k
t
kt
dt−
= ∫Θ A
2 31
1 1 1ˆ ˆ , 1,2,2 8 48k k k k kI k−
= + + + + =
Θ Θ Θq q
Determination of (2) ibC
− note: A is assumed constant only in the solution to the D.E., not in using the gyro data (model error, not data error in Θ)
− solution is a second-order algorithm, neglecting terms of order δt3
− higher-order algorithms are easily developed (Jekeli 2000)
− is given by an initialization procedure 0q

5.6 Theoretical Fundamentals of Inertial Gravimetry, C. Jekeli, OSU Airborne Gravity for Geodesy Summer School , 23-27 May 2016
Determination of δgn (1)
• Kalman filter approach to minimizing estimation errors
− estimate IMU systematic errors and gravity disturbance vector
− formulate in i-frame and assume negligible error in niC
− system state updates (observations) are differences in accelerations
( )( ) ( ) ( )
i i i
i i i i i i
i b i i b i ib b
δ δ δ
δ δ δ
= + −
= + + − − +
= − × − − C C
y a g x
a a g g x x
a a x gψ
iδ a
i i i i iie ie= + Ω Ωg xγ
− over-script, ~, denotes indicated (measured) quantity
− δai includes accelerometer errors and orientation errors

5.7 Theoretical Fundamentals of Inertial Gravimetry, C. Jekeli, OSU Airborne Gravity for Geodesy Summer School , 23-27 May 2016
• System state vector, εD
− IMU biases, scale-factor errors, assumed as random constants
Determination of δgn (2)
− orientation errors, ψ i; i i bb ib
ddt
δ= −Cψ ω
22
22
2
0 0 0 02 0 0 0 0
0 0 0 0
N Nn n n
E E g
D D
d ddt dt δ
β βδ β δ β δ
β β
= − − +
g g g w
◦ wδg is a white noise vector process with appropriately selected variances
◦ βN , βE , βD are parameters appropriately selected to model the correlation time of the processes , ,2.146 N E Dβ=
− gravity disturbance components, modeled, e.g., as second-order Gauss-Markov processes in n-frame, with i i n
nδ δ= Cg g
D D D D Dddt
= +F G wε ε where wD is a vector of white noise processes
• System dynamics equation

5.8 Theoretical Fundamentals of Inertial Gravimetry, C. Jekeli, OSU Airborne Gravity for Geodesy Summer School , 23-27 May 2016
Determination of δgn (3)
• Alternatively, omit gravity disturbance model
( )( ) ( )
i i i
i i i i i
i b i i b ib b
δ δ
δ δ
= + −
= + + − +
= − × − C C
y a g x
a a g x x
a a xψ
iδ a
i i i i iie ie= + Ω Ωg xγ
− observations assume normal gravitation is correct
− optimal estimates of IMU systematic errors by Kalman filter yield y
− gravity disturbance estimates: ˆiδ ≈ −g y y
◦ assumes residual IMU systematic errors are small and white noise can be filtered
− successfully applied technique (Kwon and Jekeli, 2001)

5.9 Theoretical Fundamentals of Inertial Gravimetry, C. Jekeli, OSU Airborne Gravity for Geodesy Summer School , 23-27 May 2016
Indirect Method • Recall inertial navigation equations in n-frame
( )n
n b n n n nb ie in
ddt
= − + +C Ω Ωv a v ge
e nn
ddt
= Cx v
− integrate (i.e., get IMU navigation solution) and solve for using a model and GNSS tracking data
ng
− analogous to traditional satellite tracking methods to determine global gravitational field, except gravity model is linear stochastic process, not spherical harmonic model
− navigation solution from OTF INS should not be integrated with GNSS!
◦ use raw accelerometer and gyro data to obtain free-inertial navigation solution
◦ IMU and GNSS must be treated as separate sensors, just like in scalar gravimetry
- one could pre-process IMU/GNSS data to solve for IMU systematic errors, neglecting gravity

5.10 Theoretical Fundamentals of Inertial Gravimetry, C. Jekeli, OSU Airborne Gravity for Geodesy Summer School , 23-27 May 2016
• Solve for gravity disturbance treated as an error state (among many others) in the linear perturbation of navigation equations
Determination of δgn (1)
− typical error states collected in state vector, εΙ , include: ◦ position errors, velocity errors, orientation errors ◦ IMU systematic errors (biases, etc.) ◦ gravity disturbance components
I I I I Iddt
= +F G wε ε where wI is a vector of white noise processes
− integration is done numerically (e.g., using linear finite differences)
( ) ( ) ( ) ( ) ( )1 1,I k I k k I k I k I kt t t t t t− −= +Φ G wε ε where Φ = state transition matrix
− observations are differences, IMU-indicated minus GNSS positions, treated as updates to the corresponding system states
( ) ( ) ( ) ( )k k I k kt t t t= +Hy ε v where v is a vector of discrete white noise processes

5.11 Theoretical Fundamentals of Inertial Gravimetry, C. Jekeli, OSU Airborne Gravity for Geodesy Summer School , 23-27 May 2016
Determination of δgn (2)
• Gravity disturbance model − stochastic process; e.g., second-order Gauss-Markov process,
22
22
2
0 0 0 02 0 0 0 0
0 0 0 0
N Nn n n
E E g
D D
d ddt dt δ
β βδ β δ β δ
β β
= − − +
g g g w
◦ wδg is a white noise vector process with appropriately selected variances
◦ βN , βE , βD are parameters appropriately selected to model the correlation time of the processes , ,2.146 N E Dβ=
− theoretically the gravity model is an approximation since the gravity field is not a linear, finite-dimensional, set of independent along-track signals as required/modeled in the system state formalism
• Kalman filter/smoother estimate, is optimal in the sense of minimum mean square error
− successful estimation depends on stochastic separability of gravity disturbance from accelerometer errors and coupled gyro errors

5.12 Theoretical Fundamentals of Inertial Gravimetry, C. Jekeli, OSU Airborne Gravity for Geodesy Summer School , 23-27 May 2016
Rudimentary Error analysis
• Assume that n- and i-frames coincide (approx. valid for < 1 hour)
n n n≈ − ⇒g x a
gravitation errors
errors in kinematic
acceleration
errors in inertial
acceleration
gravitational gradients
errors in sensor
orientation
position errors
n n n n b n bb b
n nδ δδ δ= + − −Ψ C C Γg x a a pnegligible
• δg PSD is obtained from models of IMU and position error PSDs and PSD of vehicle acceleration
1 1 3 2 2 3 1g x a a aδ δ ψ ψ δΦ Φ Φ Φ Φ= + + +
3 3 2 1 1 2 3g x a a aδ δ ψ ψ δΦ Φ Φ Φ Φ= + + +

5.13 Theoretical Fundamentals of Inertial Gravimetry, C. Jekeli, OSU Airborne Gravity for Geodesy Summer School , 23-27 May 2016
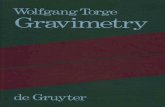
PSD Models
EGM96
1'x1' ∆g
model
frequency [cy/m]
Φδg
(f) [
mga
l2 /(cy
/m)2 ]
MathCad: degvarfit4.mcd Gravitational Field
frequency [Hz]
1aΦ
2aΦ
3aΦ
Accelerations* dashed-line: psd model
* data from Twin Otter aircraft
MathCad: accpsdfit.mcd
[(m
/s2 )
2 /Hz]
− Aircraft speed = 250 km/hr; altitude = 1000 m
– Accelerometers: white noise (±25 mGal)
– Gyros: rate bias (± 0.003°/hr) plus white noise (±0.06 °/hr/√Hz)
– Orientation: initial bias (0.005°)
approximated by simple PSD models
− Position: white noise (±0.1 m)

5.14 Theoretical Fundamentals of Inertial Gravimetry, C. Jekeli, OSU Airborne Gravity for Geodesy Summer School , 23-27 May 2016
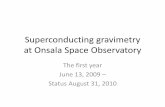
PSDs of Gravity Errors, δg1, δg3, Versus Along-Track PSDs of Signals, g1, g3
• Signal-to-noise ratio > 1 over larger bandwidth for g3
signal-to-noise ratio > 1
+ g3 :
g1 :
• Significant error source is orientation bias, especially for g1, g2
• Signal PSD’s move to right and down with increased velocity
Spectral Window:
1 10 4 1 10 3 0.01 0.11 10 9
1 10 8
1 10 7
1 10 6
1 10 5
1 10 4
1 10 3
0.01
Φδg3
Φδg1
Sg3
Sg1
[m2 /s
4 ]/H
z
Frequency [Hz]
1,3xδΦ

5.15 Theoretical Fundamentals of Inertial Gravimetry, C. Jekeli, OSU Airborne Gravity for Geodesy Summer School , 23-27 May 2016
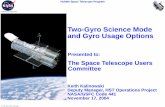
• Schematic: Pendulous, Force-Rebalance Accelerometer (e.g.)
• Torque needed to keep proof mass in equilibrium is a measure of acceleration
input axis
Case Hinge Permanent Magnet Forcer Coil
Light Emitting Diode
side view
plan view
Photo Detector
Shadow Arm Proof Mass
Forcer Direction
pulse train Pulse Rebalance Electronics Amplifier
1c
3c
2c
3c

5.16 Theoretical Fundamentals of Inertial Gravimetry, C. Jekeli, OSU Airborne Gravity for Geodesy Summer School , 23-27 May 2016
• Honeywell (Allied Signal, Sundstrandt) QA3000
Pendulous, Force-Rebalance Accelerometer (e.g.)
• Litton (Northrop Grumman) A-4 Miniature Accelerometer Triad

5.17 Theoretical Fundamentals of Inertial Gravimetry, C. Jekeli, OSU Airborne Gravity for Geodesy Summer School , 23-27 May 2016
INS Used for Airborne Gravimetry
Honeywell Laseref III
University of Calgary
Strapdown Platforms
Ohio State University
Litton LN100 Honeywell H-770
Intermap Technologies
ITC-2 Inertial Survey System
Bauman Moscow State Technical University
Stabilized Platform
iMAR RQH 1003