Muscle power at joint is product of net muscle moment and angular velocity.
29
-
Upload
jeffrey-robbins -
Category
Documents
-
view
217 -
download
0
Transcript of Muscle power at joint is product of net muscle moment and angular velocity.







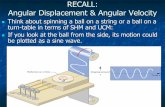
Muscle power at joint is product of net muscle moment and angular velocity


Work done by a muscle
Differential work
Work along a path

Special case: F and v are collinear


Reaction forces and velocities at a joint.Mechanical power (rate of mechanical energy transfer) equals dot product of force and velocity.


Eta+, eta- are efficiencies of positive and negative work

Flow of energy from metabolic to external mechanical work







Total energy in a muiltisegment system


Center of mass approach
Energy for movement is reflected in the kinetic and potential energy associated with translation of the body cnetr of mass. Cavanaugh et al 1966 & many more.
CoM is a vector sum of masses and accelerations, so ppositely directed accelerations cancel. B ut energy is a scalar. CoM approach neglects energy associated with causing limb movements in opposite directions.
Therefore this approach grossly underestimates mechanical energy of body movement.

Sum of segment energies approach
Fixes some of the shortcomings of the CoM approach. Still underestimates work done since it fails to capture positive and negative work done at multiple joints.

Joint power and work
Improvement on the sum of segment energies approach. Identifies positive and negative work done at each joint. Still underestimates work associated with muscle co-contraction.