Multiagent Technology Solutions for Planning in Ambient Intelligence Nicola Gatti, Francesco...
9
Multiagent Technology Solutions for Planning in Ambient Intelligence Nicola Gatti, Francesco Amigoni, Marco Rolando {ngatti, amigoni}@elet.polimi.it, [email protected] DEI, Politecnico di Milano, Piazza Leonardo da Vinci 32, Milano, 20133, Italy
-
Upload
sebastian-mcginnis -
Category
Documents
-
view
212 -
download
0
Transcript of Multiagent Technology Solutions for Planning in Ambient Intelligence Nicola Gatti, Francesco...

Multiagent Technology Solutions for Planning in Ambient IntelligenceNicola Gatti, Francesco Amigoni, Marco Rolando{ngatti, amigoni}@elet.polimi.it, [email protected]
DEI, Politecnico di Milano, Piazza Leonardo da Vinci 32, Milano, 20133, Italy

Nicola Gatti, Francesco Amigoni, Marco Rolando
Application Scenario 2

Nicola Gatti, Francesco Amigoni, Marco Rolando
Domotic AgencyOSA
Domotic Agency Paradigm
CSA
Majordomo
Agent = OSA (Operative Semi-Agent) +CSA (Cooperative SA)

Nicola Gatti, Francesco Amigoni, Marco Rolando
4Planning Devices’ Activities [Amigoni et al., T-SMC-A 2005]
Majordomo
CSA 1
CSA 2
CSA 3
CSA 4?
?
?
?

Nicola Gatti, Francesco Amigoni, Marco Rolando
5Employing Agent Technologies
• Protocols:• FIPA interaction protocols
• Ontologies:• RDF
• Software platform:• JADE/LEAP

Nicola Gatti, Francesco Amigoni, Marco Rolando
Technological Open Issues
• JADE/LEAP is not fully appropriate to develop the whole system• The operative semi-agent of each device needs to
run on the device• A JVM must run on each device, but computationally light
devices cannot support JVM• A LEAP platform must run on each device, but inter-
platform communication is supported only on TCP/IP protocol (and not, e.g., on Bluetooth)
• The cooperative semi-agent of each device needs to move from the device to a platform with high computational capabilities
• CSA’s classes need to be sent from the device to the platform by LEAP, but JVM for mobile devices does not support reflection
• It is unreasonable that platforms have the classes of all the possible CSAs
• As a result, JADE/LEAP must be improved to address such issues
6

Nicola Gatti, Francesco Amigoni, Marco Rolando
Our Improvements 7

Nicola Gatti, Francesco Amigoni, Marco Rolando
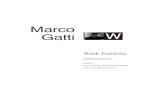
Experimental Setting and Result 8
G
C
A
B
D
Q
R SO PNM
I LG HE F
agents
(PC)
mobile
devices
response
1 1 1.01s
8 2 2.70s
16 4 3.50s
12 8 3.52s

Nicola Gatti, Francesco Amigoni, Marco Rolando
Conclusions and Future Works
• Our contributions• Development of a platform exploiting current
multiagent technologies for planning in Ambient Intelligence
• Stretching of current technologies to address mobile devices
• Promising experimental evaluation in simple case studies
• In future• We will experimentally evaluate our proposal in
concrete settings• We will improve efficiency in the planning algorithm
9