An Algorithm for Parameters Identification of an Aircraft ...

HAL Id: hal-01643177https://hal.inria.fr/hal-01643177
Submitted on 21 Nov 2017
HAL is a multi-disciplinary open accessarchive for the deposit and dissemination of sci-entific research documents, whether they are pub-lished or not. The documents may come fromteaching and research institutions in France orabroad, or from public or private research centers.
L’archive ouverte pluridisciplinaire HAL, estdestinée au dépôt et à la diffusion de documentsscientifiques de niveau recherche, publiés ou non,émanant des établissements d’enseignement et derecherche français ou étrangers, des laboratoirespublics ou privés.
Multi-task Bolasso based aircraft dynamics identificationCédric Rommel, Joseph Frédéric Bonnans, Baptiste Gregorutti, Pierre
Martinon
To cite this version:Cédric Rommel, Joseph Frédéric Bonnans, Baptiste Gregorutti, Pierre Martinon. Multi-task Bolassobased aircraft dynamics identification. PGMODays, Nov 2017, Paris, France. �hal-01643177�

Multi-task Bolasso based aircraftdynamics identification
C. Rommel1,2, J. F. Bonnans1,B. Gregorutti2 and P. Martinon1
CMAP Ecole Polytechnique - INRIA1
Safety Line2
November 14th 2017
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 1 / 19

Motivation
20 000 airplanes — 80 000 flights per day,
Should double until 2033,
Responsible for 3% of CO2 emissions,
Accounts for 30% of operational cost for an airline,
Rectilinear climb trajectories at full thrust.
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 2 / 19

Motivation
20 000 airplanes — 80 000 flights per day,
Should double until 2033,
Responsible for 3% of CO2 emissions,
Accounts for 30% of operational cost for an airline,
Rectilinear climb trajectories at full thrust.
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 2 / 19

Motivation
20 000 airplanes — 80 000 flights per day,
Should double until 2033,
Responsible for 3% of CO2 emissions,
Accounts for 30% of operational cost for an airline,
Rectilinear climb trajectories at full thrust.
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 2 / 19
Motivation
20 000 airplanes — 80 000 flights per day,
Should double until 2033,
Responsible for 3% of CO2 emissions,
Accounts for 30% of operational cost for an airline,
Rectilinear climb trajectories at full thrust.
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 2 / 19

Motivation
20 000 airplanes — 80 000 flights per day,
Should double until 2033,
Responsible for 3% of CO2 emissions,
Accounts for 30% of operational cost for an airline,
Rectilinear climb trajectories at full thrust.
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 2 / 19
Motivation
20 000 airplanes — 80 000 flights per day,
Should double until 2033,
Responsible for 3% of CO2 emissions,
Accounts for 30% of operational cost for an airline,
Rectilinear climb trajectories at full thrust.
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 2 / 19
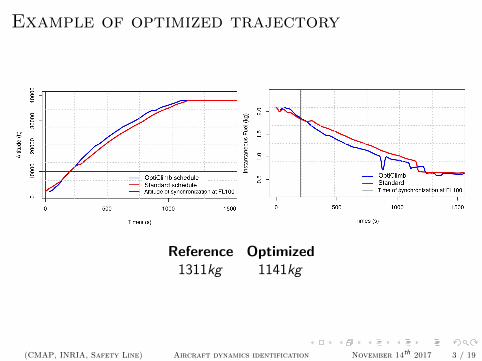
Example of optimized trajectory
Reference Optimized1311kg 1141kg
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 3 / 19
Optimal Control Problem
min(x,u)∈X×U
∫ tf
0C (t,u(t), x(t))dt,
s.t.
Φ(x(0), x(tf )) ∈ KΦ,u(t) ∈ Uad , for a.e. t ∈ [0, tf ],cj(x(t)) ≤ 0, j = 1, . . . , nc , for all t ∈ [0, tf ],x = g(t,u, x), for a.e. t ∈ [0, tf ].
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 4 / 19
Optimal Control Problem
min(x,u)∈X×U
∫ tf
0C (t,u(t), x(t))dt,
s.t.
Φ(x(0), x(tf )) ∈ KΦ,u(t) ∈ Uad , for a.e. t ∈ [0, tf ],cj(x(t)) ≤ 0, j = 1, . . . , nc , for all t ∈ [0, tf ],x = g(t,u, x), for a.e. t ∈ [0, tf ].
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 4 / 19
Optimal Control Problem
min(x,u)∈X×U
∫ tf
0C (t,u(t), x(t))dt,
s.t.
Φ(x(0), x(tf )) ∈ KΦ,u(t) ∈ Uad , for a.e. t ∈ [0, tf ],cj(x(t)) ≤ 0, j = 1, . . . , nc , for all t ∈ [0, tf ],x = g(t,u, x), for a.e. t ∈ [0, tf ].
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 4 / 19

Optimal Control Problem
min(x,u)∈X×U
∫ tf
0C (t,u(t), x(t))dt,
s.t.
Φ(x(0), x(tf )) ∈ KΦ,u(t) ∈ Uad , for a.e. t ∈ [0, tf ],cj(x(t)) ≤ 0, j = 1, . . . , nc , for all t ∈ [0, tf ],x = g(t,u, x), for a.e. t ∈ [0, tf ].
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 4 / 19

Optimal Control Problem
min(x,u)∈X×U
∫ tf
0C (t,u(t), x(t))dt,
s.t.
Φ(x(0), x(tf )) ∈ KΦ,u(t) ∈ Uad , for a.e. t ∈ [0, tf ],cj(x(t)) ≤ 0, j = 1, . . . , nc , for all t ∈ [0, tf ],x = g(t,u, x), for a.e. t ∈ [0, tf ].
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 4 / 19
Optimal Control Problem
min(x,u)∈X×U
∫ tf
0C (t,u(t), x(t))dt,
s.t.
Φ(x(0), x(tf )) ∈ KΦ,u(t) ∈ Uad , for a.e. t ∈ [0, tf ],cj(x(t)) ≤ 0, j = 1, . . . , nc , for all t ∈ [0, tf ],x = g(t,u, x), for a.e. t ∈ [0, tf ].
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 4 / 19

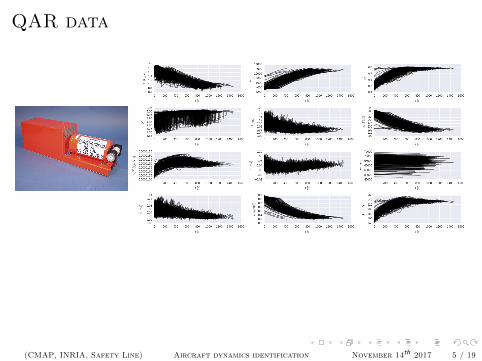
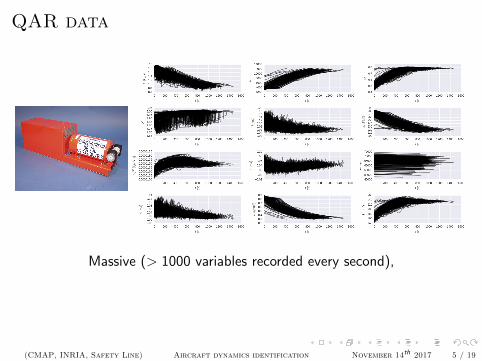
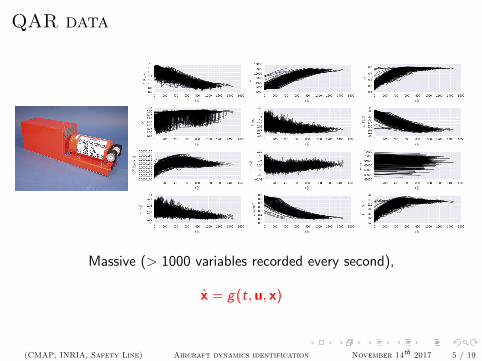
QAR data
Massive (> 1000 variables recorded every second),
x = g(t,u, x)
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 5 / 19

QAR data
Massive (> 1000 variables recorded every second),
x = g(t,u, x)
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 5 / 19
QAR data
Massive (> 1000 variables recorded every second),
x = g(t,u, x)
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 5 / 19
QAR data
Massive (> 1000 variables recorded every second),
x = g(t,u, x)
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 5 / 19
QAR data
Massive (> 1000 variables recorded every second),
x = g(t,u, x)
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 5 / 19

Flight mechanics and state equation
Classic flight mechanics model
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 6 / 19
Flight mechanics and state equation
h = V sin γ,
V =T cosα− D −mg sin γ
m,
γ =T sinα + L−mg cos γ
mV,
m = − T
Isp.
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 7 / 19
Flight mechanics and state equation
h = V sin γ,
V =T cosα− D −mg sin γ
m,
γ =T sinα + L−mg cos γ
mV,
m = − T
Isp.
State variables: x = [h,V , γ,m]
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 7 / 19
Flight mechanics and state equation
h = V sin γ,
V =T cosα− D −mg sin γ
m,
γ =T sinα + L−mg cos γ
mV,
m = − T
Isp.
State variables: x = [h,V , γ,m]Control variables: u = [α,N1]
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 7 / 19
Flight mechanics and state equation
h = V sin γ,
V =T cosα− D −mg sin γ
m,
γ =T sinα + L−mg cos γ
mV,
m = − T
Isp.
State variables: x = [h,V , γ,m]Control variables: u = [α,N1]Unknown functions of the state and control variables
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 7 / 19

Flight mechanics and state equation
h = V sin γ,
V =T (x,u) cosα− D(x,u)−mg sin γ
m,
γ =T (x,u) sinα + L(x,u)−mg cos γ
mV,
m = − T (x,u)
Isp(x,u).
State variables: x = [h,V , γ,m]Control variables: u = [α,N1]Unknown functions of the state and control variables
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 7 / 19

Model requirements
T function of (M, ρ,N1),
D function of (M, ρ, q),
L function of (M, ρ, q),
Isp function of (M, h,SAT ),
Need for smooth models,
Need for models which are fast to compute,
Need for interpretable models for safety,
Need for models which are rich enough.
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 8 / 19

Model requirements
T function of (M, ρ,N1) = ϕT (x,u),
D function of (M, ρ, q) = ϕD(x,u),
L function of (M, ρ, q) = ϕL(x,u),
Isp function of (M, h,SAT ) = ϕIsp(x,u),
Need for smooth models,
Need for models which are fast to compute,
Need for interpretable models for safety,
Need for models which are rich enough.
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 8 / 19

Model requirements
T function of (M, ρ,N1) = ϕT (x,u),
D function of (M, ρ, q) = ϕD(x,u),
L function of (M, ρ, q) = ϕL(x,u),
Isp function of (M, h,SAT ) = ϕIsp(x,u),
Need for smooth models,
Need for models which are fast to compute,
Need for interpretable models for safety,
Need for models which are rich enough.
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 8 / 19

Model requirements
T function of (M, ρ,N1) = ϕT (x,u),
D function of (M, ρ, q) = ϕD(x,u),
L function of (M, ρ, q) = ϕL(x,u),
Isp function of (M, h,SAT ) = ϕIsp(x,u),
Need for smooth models,
Need for models which are fast to compute,
Need for interpretable models for safety,
Need for models which are rich enough.
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 8 / 19
Model requirements
T function of (M, ρ,N1) = ϕT (x,u),
D function of (M, ρ, q) = ϕD(x,u),
L function of (M, ρ, q) = ϕL(x,u),
Isp function of (M, h,SAT ) = ϕIsp(x,u),
Need for smooth models,
Need for models which are fast to compute,
Need for interpretable models for safety,
Need for models which are rich enough.
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 8 / 19
Model requirements
T = XT · θT ,D = XD · θD ,L = XL · θL,Isp = XIsp · θIsp.
Need for smooth models,
Need for models which are fast to compute,
Need for interpretable models for safety,
Need for models which are rich enough.
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 8 / 19

Model requirements
T = XT · θT , with XT 6= ϕT (x,u),
D = XD · θD , with XD 6= ϕD(x,u),
L = XL · θL, with XL 6= ϕL(x,u),
Isp = XIsp · θIsp, with XIsp 6= ϕIsp(x,u).
Need for smooth models,
Need for models which are fast to compute,
Need for interpretable models for safety,
Need for models which are rich enough.
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 8 / 19
Model requirements
T = XT · θT , with XT 6= ϕT (x,u),
D = XD · θD , with XD 6= ϕD(x,u),
L = XL · θL, with XL 6= ϕL(x,u),
Isp = XIsp · θIsp, with XIsp 6= ϕIsp(x,u).
Need for smooth models,
Need for models which are fast to compute,
Need for interpretable models for safety,
Need for models which are rich enough.
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 8 / 19

Model requirements
T = XT · θT , with XT = Φd ◦ ϕT (x,u),
D = XD · θD , with XD = Φd ◦ ϕD(x,u),
L = XL · θL, with XL = Φd ◦ ϕL(x,u),
Isp = XIsp · θIsp, with XIsp = Φd ◦ ϕIsp(x,u).
Need for smooth models,
Need for models which are fast to compute,
Need for interpretable models for safety,
Need for models which are rich enough.
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 8 / 19

Model requirements
T = XT · θT , with XT = N1(1, ρ,M, ρ2, ρM,M2, ...),
D = XD · θD , with XD = q(1, α,M, α2, αM,M2, ...),
L = XL · θL, with XL = q(1, α,M, α2, αM,M2, ...),
Isp = XIsp · θIsp, with XIsp = (1, h,M, h2, hM,M2, ...).
Need for smooth models,
Need for models which are fast to compute,
Need for interpretable models for safety,
Need for models which are rich enough.
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 8 / 19
Regression problems
h = V sin γ
mVr = T cosα− D −mg sin γ
mVr γ = T sinα + L−mg cos γ
m = − TIsp.
Targets to fit Unknown Random error
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 9 / 19

Regression problems
h = V sin γ
mVr = T cosα− D −mg sin γ
mVr γ = T sinα + L−mg cos γ
m = − TIsp.
Targets to fit Unknown Random error
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 9 / 19
Regression problems
h = V sin γ
mVr + mg sin γ = T cosα− D
mVr γ + mg cos γ = T sinα + L
m = − TIsp.
Targets to fit Unknown Random error
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 9 / 19
Regression problems
h = V sin γ
mVr + mg sin γ = T cosα− D
mVr γ + mg cos γ = T sinα + L
0 = T + mIsp.
Targets to fit Unknown Random error
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 9 / 19

Regression problems
h = V sin γ
mVr + mg sin γ = T cosα− D
mVr γ + mg cos γ = T sinα + L
0 = T + mIsp.
⇓Y1 = XT cosα · θT − XD · θD +ε1
Y2 = XT sinα · θT + XL · θL +ε2
0 = XT · θT + mXIsp · θIsp +ε3
Targets to fit Unknown Random error
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 9 / 19

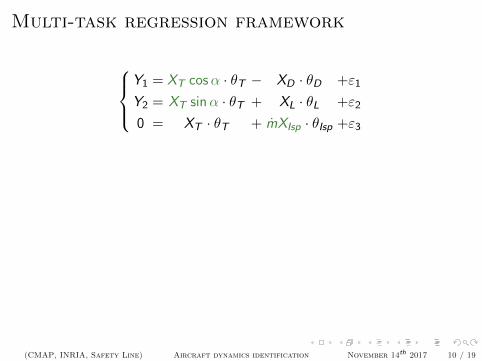
Multi-task regression framework
Y1 = XT cosα · θT − XD · θD +ε1
Y2 = XT sinα · θT + XL · θL +ε2
0 = XT · θT + mXIsp · θIsp +ε3
Y1
Y2
0
︸ ︷︷ ︸
Y
=
X>T1 −X>D 0 0X>T2 0 X>L 0X>T 0 0 X>Ispm
︸ ︷︷ ︸
X
θTθDθLθIsp
︸ ︷︷ ︸
θ
+
ε1
ε2
ε3
︸ ︷︷ ︸
ε
.
Ensures all components of g to share the same thrust T ,
Better predictive accuracy from tight coupling,
Helps in high correlations setting.
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 10 / 19
Multi-task regression framework
Y1 = XT cosα · θT − XD · θD +ε1
Y2 = XT sinα · θT + XL · θL +ε2
0 = XT · θT + mXIsp · θIsp +ε3
Y1
Y2
0
︸ ︷︷ ︸
Y
=
X>T1 −X>D 0 0X>T2 0 X>L 0X>T 0 0 X>Ispm
︸ ︷︷ ︸
X
θTθDθLθIsp
︸ ︷︷ ︸
θ
+
ε1
ε2
ε3
︸ ︷︷ ︸
ε
.
Ensures all components of g to share the same thrust T ,
Better predictive accuracy from tight coupling,
Helps in high correlations setting.
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 10 / 19

Multi-task regression framework
Y1 = XT1 · θT − XD · θD +ε1
Y2 = XT2 · θT + XL · θL +ε2
0 = XT · θT + XIspm · θIsp +ε3
Y1
Y2
0
︸ ︷︷ ︸
Y
=
X>T1 −X>D 0 0X>T2 0 X>L 0X>T 0 0 X>Ispm
︸ ︷︷ ︸
X
θTθDθLθIsp
︸ ︷︷ ︸
θ
+
ε1
ε2
ε3
︸ ︷︷ ︸
ε
.
Ensures all components of g to share the same thrust T ,
Better predictive accuracy from tight coupling,
Helps in high correlations setting.
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 10 / 19

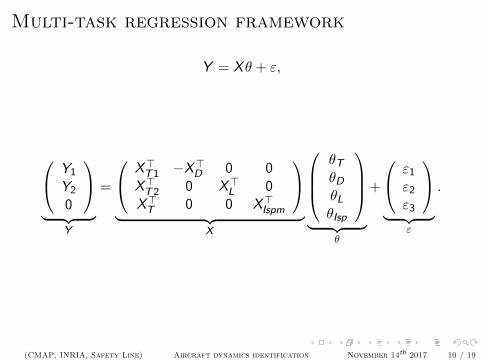
Multi-task regression framework
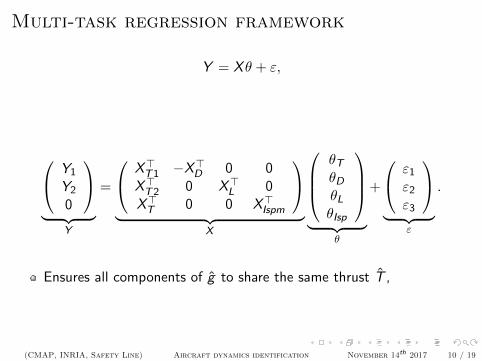
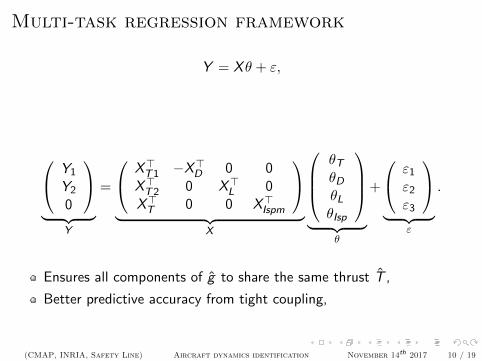
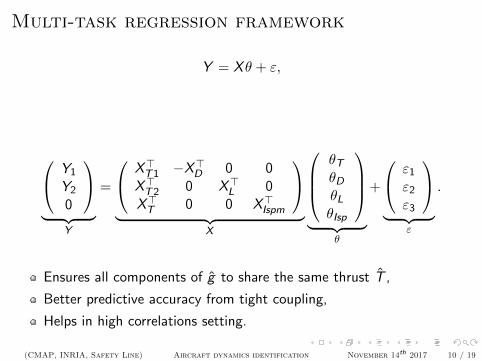
Y = Xθ + ε,
Y1
Y2
0
︸ ︷︷ ︸
Y
=
X>T1 −X>D 0 0X>T2 0 X>L 0X>T 0 0 X>Ispm
︸ ︷︷ ︸
X
θTθDθLθIsp
︸ ︷︷ ︸
θ
+
ε1
ε2
ε3
︸ ︷︷ ︸
ε
.
Ensures all components of g to share the same thrust T ,
Better predictive accuracy from tight coupling,
Helps in high correlations setting.
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 10 / 19
Multi-task regression framework
Y = Xθ + ε,
Y1
Y2
0
︸ ︷︷ ︸
Y
=
X>T1 −X>D 0 0X>T2 0 X>L 0X>T 0 0 X>Ispm
︸ ︷︷ ︸
X
θTθDθLθIsp
︸ ︷︷ ︸
θ
+
ε1
ε2
ε3
︸ ︷︷ ︸
ε
.
Ensures all components of g to share the same thrust T ,
Better predictive accuracy from tight coupling,
Helps in high correlations setting.
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 10 / 19
Multi-task regression framework
Y = Xθ + ε,
Y1
Y2
0
︸ ︷︷ ︸
Y
=
X>T1 −X>D 0 0X>T2 0 X>L 0X>T 0 0 X>Ispm
︸ ︷︷ ︸
X
θTθDθLθIsp
︸ ︷︷ ︸
θ
+
ε1
ε2
ε3
︸ ︷︷ ︸
ε
.
Ensures all components of g to share the same thrust T ,
Better predictive accuracy from tight coupling,
Helps in high correlations setting.
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 10 / 19
Multi-task regression framework
Y = Xθ + ε,
Y1
Y2
0
︸ ︷︷ ︸
Y
=
X>T1 −X>D 0 0X>T2 0 X>L 0X>T 0 0 X>Ispm
︸ ︷︷ ︸
X
θTθDθLθIsp
︸ ︷︷ ︸
θ
+
ε1
ε2
ε3
︸ ︷︷ ︸
ε
.
Ensures all components of g to share the same thrust T ,
Better predictive accuracy from tight coupling,
Helps in high correlations setting.
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 10 / 19
Multi-task regression framework
Y = Xθ + ε,
Y1
Y2
0
︸ ︷︷ ︸
Y
=
X>T1 −X>D 0 0X>T2 0 X>L 0X>T 0 0 X>Ispm
︸ ︷︷ ︸
X
θTθDθLθIsp
︸ ︷︷ ︸
θ
+
ε1
ε2
ε3
︸ ︷︷ ︸
ε
.
Ensures all components of g to share the same thrust T ,
Better predictive accuracy from tight coupling,
Helps in high correlations setting.
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 10 / 19

Feature selectionLet {(xi ,ui , xi )}Ni=1 set of N observations,
{X i ,Y i}Ni=1,
Maybe not all monomials are relevant for T ,D, L and/or Isp model...
Overfitting...
Polynomial regression high correlations between elements of X i
Unstable selections...
⇒ Bolasso [Bach, 2008]
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 11 / 19
Feature selectionLet {(xi ,ui , xi )}Ni=1 set of N observations, {X i ,Y i}Ni=1,
Maybe not all monomials are relevant for T ,D, L and/or Isp model...
Overfitting...
Polynomial regression high correlations between elements of X i
Unstable selections...
⇒ Bolasso [Bach, 2008]
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 11 / 19
Feature selectionLet {(xi ,ui , xi )}Ni=1 set of N observations, {X i ,Y i}Ni=1,
Maybe not all monomials are relevant for T ,D, L and/or Isp model...
Overfitting...
Empirical Risk Minimization
minθ
1
N
N∑i=1
L(Y i ,X iθ),
Polynomial regression high correlations between elements of X i
Unstable selections...
⇒ Bolasso [Bach, 2008]
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 11 / 19

Feature selectionLet {(xi ,ui , xi )}Ni=1 set of N observations, {X i ,Y i}Ni=1,
Maybe not all monomials are relevant for T ,D, L and/or Isp model...
Overfitting...
Least Squares Regression
minθ
1
N
N∑i=1
‖Y i − X iθ‖22,
Polynomial regression high correlations between elements of X i
Unstable selections...
⇒ Bolasso [Bach, 2008]
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 11 / 19

Feature selectionLet {(xi ,ui , xi )}Ni=1 set of N observations, {X i ,Y i}Ni=1,Maybe not all monomials are relevant for T ,D, L and/or Isp model...
Overfitting...
Least Squares Regression
minθ
1
N
N∑i=1
‖Y i − X iθ‖22,
Polynomial regression high correlations between elements of X i
Unstable selections...
⇒ Bolasso [Bach, 2008]
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 11 / 19

Feature selectionLet {(xi ,ui , xi )}Ni=1 set of N observations, {X i ,Y i}Ni=1,Maybe not all monomials are relevant for T ,D, L and/or Isp model...
Overfitting...
Least Squares Regression
minθ
1
N
N∑i=1
‖Y i − X iθ‖22,
Polynomial regression high correlations between elements of X i
Unstable selections...
⇒ Bolasso [Bach, 2008]
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 11 / 19

Feature selectionLet {(xi ,ui , xi )}Ni=1 set of N observations, {X i ,Y i}Ni=1,Maybe not all monomials are relevant for T ,D, L and/or Isp model...
Overfitting...
L1 penalization
minθ
1
N
N∑i=1
‖Y i − X iθ‖22 + λ‖θ‖1,
Polynomial regression high correlations between elements of X i
Unstable selections...
⇒ Bolasso [Bach, 2008]
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 11 / 19

Feature selectionLet {(xi ,ui , xi )}Ni=1 set of N observations, {X i ,Y i}Ni=1,Maybe not all monomials are relevant for T ,D, L and/or Isp model...
Overfitting...
L1 penalization
minθ
1
N
N∑i=1
‖Y i − X iθ‖22 + λ‖θ‖1,
' Lasso [Tibshirani, 1994]
Polynomial regression high correlations between elements of X i
Unstable selections...
⇒ Bolasso [Bach, 2008]
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 11 / 19

Feature selectionLet {(xi ,ui , xi )}Ni=1 set of N observations, {X i ,Y i}Ni=1,Maybe not all monomials are relevant for T ,D, L and/or Isp model...
Overfitting...
Block sparse Lasso
minθ
1
N
N∑i=1
‖Y i − X iθ‖22 + λ‖θ‖1,
' Lasso [Tibshirani, 1994]
Polynomial regression high correlations between elements of X i
Unstable selections...
⇒ Bolasso [Bach, 2008]
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 11 / 19

Feature selectionLet {(xi ,ui , xi )}Ni=1 set of N observations, {X i ,Y i}Ni=1,Maybe not all monomials are relevant for T ,D, L and/or Isp model...
Overfitting...
Block sparse Lasso
minθ
1
N
N∑i=1
‖Y i − X iθ‖22 + λ‖θ‖1,
' Lasso [Tibshirani, 1994]
Polynomial regression
high correlations between elements of X i
Unstable selections...
⇒ Bolasso [Bach, 2008]
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 11 / 19

Feature selectionLet {(xi ,ui , xi )}Ni=1 set of N observations, {X i ,Y i}Ni=1,Maybe not all monomials are relevant for T ,D, L and/or Isp model...
Overfitting...
Block sparse Lasso
minθ
1
N
N∑i=1
‖Y i − X iθ‖22 + λ‖θ‖1,
' Lasso [Tibshirani, 1994]
Polynomial regression high correlations between elements of X i
Unstable selections...
⇒ Bolasso [Bach, 2008]
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 11 / 19
Feature selectionLet {(xi ,ui , xi )}Ni=1 set of N observations, {X i ,Y i}Ni=1,Maybe not all monomials are relevant for T ,D, L and/or Isp model...
Overfitting...
Block sparse Lasso
minθ
1
N
N∑i=1
‖Y i − X iθ‖22 + λ‖θ‖1,
' Lasso [Tibshirani, 1994]
Polynomial regression high correlations between elements of X i
Unstable selections...
⇒ Bolasso [Bach, 2008]
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 11 / 19
Feature selectionLet {(xi ,ui , xi )}Ni=1 set of N observations, {X i ,Y i}Ni=1,Maybe not all monomials are relevant for T ,D, L and/or Isp model...
Overfitting...
Block sparse Lasso
minθ
1
N
N∑i=1
‖Y i − X iθ‖22 + λ‖θ‖1,
' Lasso [Tibshirani, 1994]
Polynomial regression high correlations between elements of X i
Unstable selections...
⇒ Bolasso [Bach, 2008]
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 11 / 19
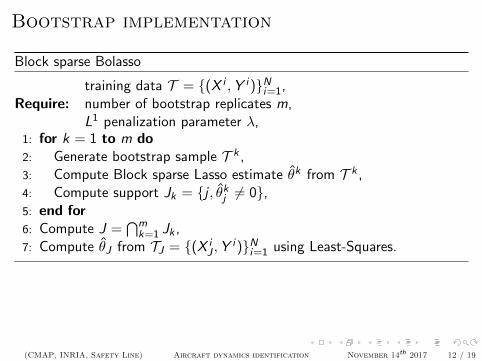
Bootstrap implementation
Block sparse Bolasso
Require:training data T = {(X i ,Y i )}Ni=1,number of bootstrap replicates m,L1 penalization parameter λ,
1: for k = 1 to m do2: Generate bootstrap sample T k ,3: Compute Block sparse Lasso estimate θk from T k ,4: Compute support Jk = {j , θkj 6= 0},5: end for6: Compute J =
⋂mk=1 Jk ,
7: Compute θJ from TJ = {(X iJ ,Y
i )}Ni=1 using Least-Squares.
Consistency under high correlations proved in [Bach, 2008],
Efficient implementations exists: LARS [Efron et al., 2004].
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 12 / 19

Bootstrap implementation
Block sparse Bolasso
Require:training data T = {(X i ,Y i )}Ni=1,number of bootstrap replicates m,L1 penalization parameter λ,
1: for k = 1 to m do2: Generate bootstrap sample T k ,3: Compute Block sparse Lasso estimate θk from T k ,4: Compute support Jk = {j , θkj 6= 0},5: end for6: Compute J =
⋂mk=1 Jk ,
7: Compute θJ from TJ = {(X iJ ,Y
i )}Ni=1 using Least-Squares.
Consistency under high correlations proved in [Bach, 2008],
Efficient implementations exists: LARS [Efron et al., 2004].
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 12 / 19

Bootstrap implementation
Block sparse Bolasso
Require:training data T = {(X i ,Y i )}Ni=1,number of bootstrap replicates m,L1 penalization parameter λ,
1: for k = 1 to m do2: Generate bootstrap sample T k ,3: Compute Block sparse Lasso estimate θk from T k ,4: Compute support Jk = {j , θkj 6= 0},5: end for6: Compute J =
⋂mk=1 Jk ,
7: Compute θJ from TJ = {(X iJ ,Y
i )}Ni=1 using Least-Squares.
Consistency under high correlations proved in [Bach, 2008],
Efficient implementations exists: LARS [Efron et al., 2004].
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 12 / 19

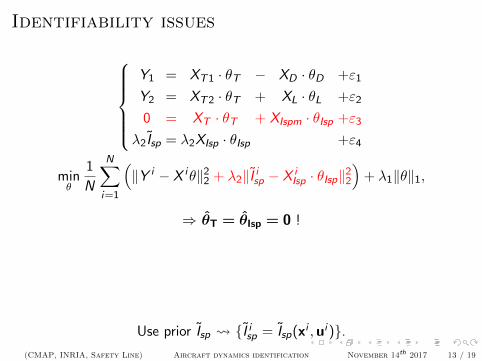
Identifiability issues
Use prior Isp {I isp = Isp(xi ,ui )}.
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 13 / 19

Identifiability issues
Y1 = XT1 · θT − XD · θD +ε1
Y2 = XT2 · θT + XL · θL +ε2
0 = XT · θT + XIspm · θIsp +ε3
Use prior Isp {I isp = Isp(xi ,ui )}.
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 13 / 19
Identifiability issues
Y1 = XT1 · θT − XD · θD +ε1
Y2 = XT2 · θT + XL · θL +ε2
0 = XT · θT + XIspm · θIsp +ε3
Use prior Isp {I isp = Isp(xi ,ui )}.
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 13 / 19

Identifiability issues
Y1 = XT1 · θT − XD · θD +ε1
Y2 = XT2 · θT + XL · θL +ε2
0 = XT · θT + XIspm · θIsp +ε3
minθ
1
N
N∑i=1
‖Y i − X iθ‖22 + λ1‖θ‖1,
Use prior Isp {I isp = Isp(xi ,ui )}.
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 13 / 19
Identifiability issues
Y1 = XT1 · θT − XD · θD +ε1
Y2 = XT2 · θT + XL · θL +ε2
0 = XT · θT + XIspm · θIsp +ε3
minθ
1
N
N∑i=1
‖Y i − X iθ‖22 + λ1‖θ‖1,
⇒ θT = θIsp = 0 !
Use prior Isp {I isp = Isp(xi ,ui )}.
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 13 / 19
Identifiability issues
Y1 = XT1 · θT − XD · θD +ε1
Y2 = XT2 · θT + XL · θL +ε2
0 = XT · θT + XIspm · θIsp +ε3
minθ
1
N
N∑i=1
‖Y i − X iθ‖22 + λ1‖θ‖1,
⇒ θT = θIsp = 0 !
Use prior Isp {I isp = Isp(xi ,ui )}.(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 13 / 19
Identifiability issues
Y1 = XT1 · θT − XD · θD +ε1
Y2 = XT2 · θT + XL · θL +ε2
0 = XT · θT + XIspm · θIsp +ε3
minθ
1
N
N∑i=1
(‖Y i − X iθ‖2
2 + λ2‖I isp − X iIsp · θIsp‖2
2
)+ λ1‖θ‖1,
⇒ θT = θIsp = 0 !
Use prior Isp {I isp = Isp(xi ,ui )}.(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 13 / 19
Identifiability issues
Y1 = XT1 · θT − XD · θD +ε1
Y2 = XT2 · θT + XL · θL +ε2
0 = XT · θT + XIspm · θIsp +ε3
λ2 Isp = λ2XIsp · θIsp +ε4
minθ
1
N
N∑i=1
(‖Y i − X iθ‖2
2 + λ2‖I isp − X iIsp · θIsp‖2
2
)+ λ1‖θ‖1,
⇒ θT = θIsp = 0 !
Use prior Isp {I isp = Isp(xi ,ui )}.(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 13 / 19

Identifiability issues
Y1 = XT1 · θT − XD · θD +ε1
Y2 = XT2 · θT + XL · θL +ε2
0 = XT · θT + XIspm · θIsp +ε3
λ2 Isp = λ2XIsp · θIsp +ε4
minθ
1
N
N∑i=1
‖Y i − X iθ‖22 + λ1‖θ‖1,
⇒ θT = θIsp = 0 !
Use prior Isp {I isp = Isp(xi ,ui )}.(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 13 / 19

Identifiability issues
Y1 = XT1 · θT − XD · θD +ε1
Y2 = XT2 · θT + XL · θL +ε2
0 = XT · θT + XIspm · θIsp +ε3
λ2 Isp = λ2XIsp · θIsp +ε4
minθ
1
N
N∑i=1
‖Y i − X iθ‖22 + λ1‖θ‖1,
Y i =
Y i
1
Y i2
0
λ2 Iisp
, X i =
(X i
T1)> −(X iD)> 0 0
(X iT2)> 0 (X i
L)> 0
(X iT )> 0 0 (X i
Ispm)>
0 0 0 λ2(X iIsp)>
,
Use prior Isp {I isp = Isp(xi ,ui )}.(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 13 / 19

Feature selection results
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 14 / 19

Feature selection results
25 different B737-800,
10 471 flights = 8 261 619 observations,
Block sparse Bolasso used for T ,D, L and Isp,
We expect similar model structures,
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 14 / 19

Feature selection results
25 different B737-800,
10 471 flights = 8 261 619 observations,
Block sparse Bolasso used for T ,D, L and Isp,
We expect similar model structures,
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 14 / 19

Feature selection results
25 different B737-800,
10 471 flights = 8 261 619 observations,
Block sparse Bolasso used for T ,D, L and Isp,
We expect similar model structures,
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 14 / 19
Feature selection results
25 different B737-800,
10 471 flights = 8 261 619 observations,
Block sparse Bolasso used for T ,D, L and Isp,
We expect similar model structures,
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 14 / 19
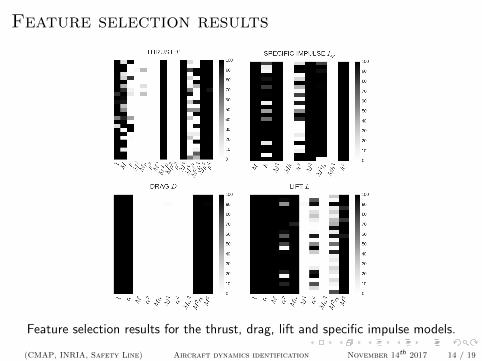
Feature selection results
Feature selection results for the thrust, drag, lift and specific impulse models.
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 14 / 19

Effect of λ2 on predicted states derivatives
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 15 / 19
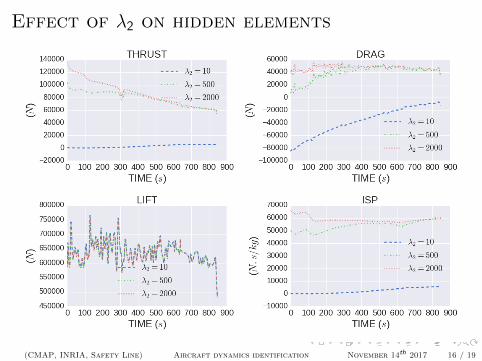
Effect of λ2 on hidden elements
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 16 / 19

Identification results assessment
x− g(x,u)
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 17 / 19

Identification results assessment
x− x
u− u
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 17 / 19
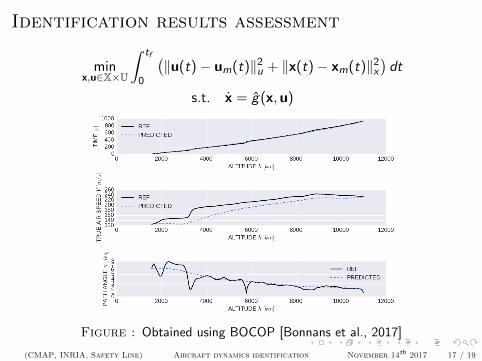
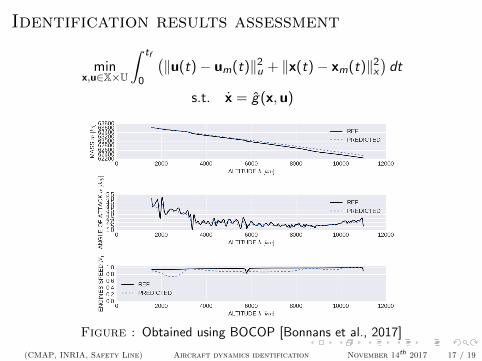
Identification results assessment
minx,u∈X×U
∫ tf
0
(‖u(t)− um(t)‖2
u + ‖x(t)− xm(t)‖2x
)dt
s.t. x = g(x,u)
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 17 / 19
Identification results assessment
minx,u∈X×U
∫ tf
0
(‖u(t)− um(t)‖2
u + ‖x(t)− xm(t)‖2x
)dt
s.t. x = g(x,u)
Figure : Obtained using BOCOP [Bonnans et al., 2017]
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 17 / 19
Identification results assessment
minx,u∈X×U
∫ tf
0
(‖u(t)− um(t)‖2
u + ‖x(t)− xm(t)‖2x
)dt
s.t. x = g(x,u)
Figure : Obtained using BOCOP [Bonnans et al., 2017]
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 17 / 19
THANK YOU FOR YOUR ATTENTION !
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 18 / 19

References
Bach, F. (2008).Bolasso: model consistent Lasso estimation through the bootstrap.pages 33–40. Proceedings of the 25th International Conference onMachine Learning (ICML).
Bonnans, J. F., Giorgi, D., Grelard, V., Heymann, B., Maindrault, S.,Martinon, P., Tissot, O., and Liu, J. (2017).Bocop – A collection of examples.Technical report, INRIA.
Efron, B. et al. (2004).Least angle regression.Annals of Statistics, 32:407–499.
Tibshirani, R. (1994).Regression shrinkage and selection via the Lasso.Journal of the Royal Statistical Society, 58:267–288.
(CMAP, INRIA, Safety Line) Aircraft dynamics identification November 14th 2017 19 / 19