MSR-H01 Hexapod Assembly Guidehexapodrobot.com/Files/Guides/MSR-H01_Assembly.pdf · MSR-H01 Hexapod...
11
Transcript of MSR-H01 Hexapod Assembly Guidehexapodrobot.com/Files/Guides/MSR-H01_Assembly.pdf · MSR-H01 Hexapod...


Safety First!
Updated: 18-Aug-2008
Safety First!
Read and understand the documentation associated with any of the tools used in the assembly of these kits. Work in a clean, well-lit environment. Work slowly taking breaks often. Plan your work with plenty of extra time to avoid cramming to complete the project at the last minute. micromagic systems has taken every step to ensure the products sold are safe when used in a responsible manner. Therefore, micromagic systems cannot be held accountable for irresponsible, careless or reckless behavior of the builder.
These kits are purely educational. Items sold by micromagic systems are not authorized for use in human contact, medical, life-saving, life-support, industrial or light industrial applications. Do not under any circumstances use these robots to move, touch, or handle dangerous or hazardous materials. Doing this could result in injury or death to the user, or damage to property.
Please note that Robots can move without warning, wear eye protection at all times and never touch a powered robot!
micromagic systems is not responsible for any special, incidental, or consequential damages resulting from any breach of warranty, or under any legal theory, including lost profits, downtime, goodwill, damage to or replacement of equipment or property, and any costs of recovering, reprogramming, or reproducing of data associated with the use of the mechanics, hardware or software it sells
Battery Advise
NiCd, NiMh, LiPo & LiIo batteries store a great amount of energy and can damage equipment or cause fire if shorted and an improper fuse is installed or bypassed. Always use an inline fuse with your battery pack. Disconnect all batteries when not in use. Store in a cool dry place. Use only the manufacturers recommended charging equipment for your batteries.
Acrylic Parts

Hitec Servo Preparation Guide
Updated: 18-Aug-2008
Before attaching servos to your robot, it is necessary to check that the servo horn is fitted correctly and in the center position. This guide will explain how this is achieved.
Print this single page document with the following settings: Paper A4 or Letter, Margins 0.4", Scale 70%. tested in IE7 & Firefox 3.0.1
Index
Servo Horn PositionServo Horn Centering
Servo Horn Position
Figure 1.
When you first remove your Hitec servo from the packet, the servo horn should be fitted in the position shown in Figure 1. This should be the servo center position, however, this is not guaranteed so we suggest this is checked before you begin kit assembly. (See Setting Servo Center)
The holes indicated by (A) & (B) are used for attaching the horn to other mechanical assemblies. This is done with No.2 self tapping screws. Although not necessary, you may wish to open these holes up with a 1.5mm or 1/16" drill for easier assembly.
Hitec servo splines have 24 teeth, which means the servo horn can be moved around in 15° increments.
Servo Horn Centering To check if your servo horn has been fitted in the mid position (center of rotation) correctly as shown in Figure 1. you will need to power up the servo with a 1.5ms positive pulse sent every 20ms (50Hz). This can be done using an R/C style transmitter/receiver, a p.Brain-HexEngine or SSC.
Using p.Brain-HexEngine Connect a 6.0V power supply or battery pack via a switch to the SMB board, V+ to the VS screw terminal and V- to one of the GND screw terminals. Install a jumper on JP3 across pins 1-2, this sets VL = VS for single power source supply. Remove any jumpers on CN18. Connect the terminal port RJ11 4/4 connector to the serial port of your host computer using a suitable lead such as a p.Brain-RJ232.

p.Brain-hexEngine: 6V dc is supplied to the VS terminal via a switch, with JP3 1-2 link in place to supply VL from VS. Open up a connection in your terminal
software on the host system, set the baud to match that of your HexEngine ( default = 115200,N,8,1). Switch on power to the SMB, you should see a RED led near the terminal block illuminate (if it does not, switch off power immediately and check your circuit). When powered up you should see the HexEngine display message in the terminal window, enter the SERVO TEST screen by typing "SERVO TEST" within your terminal screen. Once in SERVO TEST mode, select the servo you wish to test using the left/right cursor keys, press the '2' key to send the servo to the required 1.5ms mid position. The servo horn should now be in the position indicated by Figure 1.
Using Lynxmotion SSC32 Please visit the following link: http://www.lynxmotion.com/images/html/build046.htm
Once you have your servo powered up with the required 1.5ms signal, If you find your servo horn is not in the expected position remove the servo horn and move it as close to the position indicated in Figure 1.
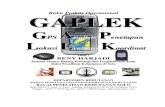
MSR-H01 Hexapod Assembly Guide Updated: 18-Aug-2008
Read first: Safety First! Read first: Servo Preparation Guide
Properly identify all screws, washers, stand-offs and hardware etc. and gather together those necessary for each step. Carefully read and study the drawings prior to each assembly.
Print this 6 page document with the following settings: Paper A4 or Letter, Margins 0.4", Scale 66%. tested in IE7 & Firefox 3.0.1
Index
Coxa Bottom Plate Assembly MSR-H01_ASSY01Coxa Top Plate Assembly MSR-H01_ASSY02Coxa Top Plate & Servo Assembly MSR-H01_ASSY03Coxa & Femur Servo Assembly MSR-H01-ASSY04Tibia Plate & Servo Assembly MSR-H01-ASSY05Right Leg Finish Assembly MSR-H01-ASSY06Left Leg Assembly MSR-H01-ASSY07Lower Body Assembly MSR-H01-ASSY08Upper Body Assembly MSR-H01-ASSY09p.Brain-SMB Circuit Board InstallationLeg & Body Attachment Assembly MSR-H01-ASSY10Lower Body Attachment Assembly MSR-H01-ASSY11Appendix A - Assembly Hardware Appendix B - Aluminum Leg Parts Appendix C - Aluminum Body Parts
MSR-H01 Right Leg Assembly
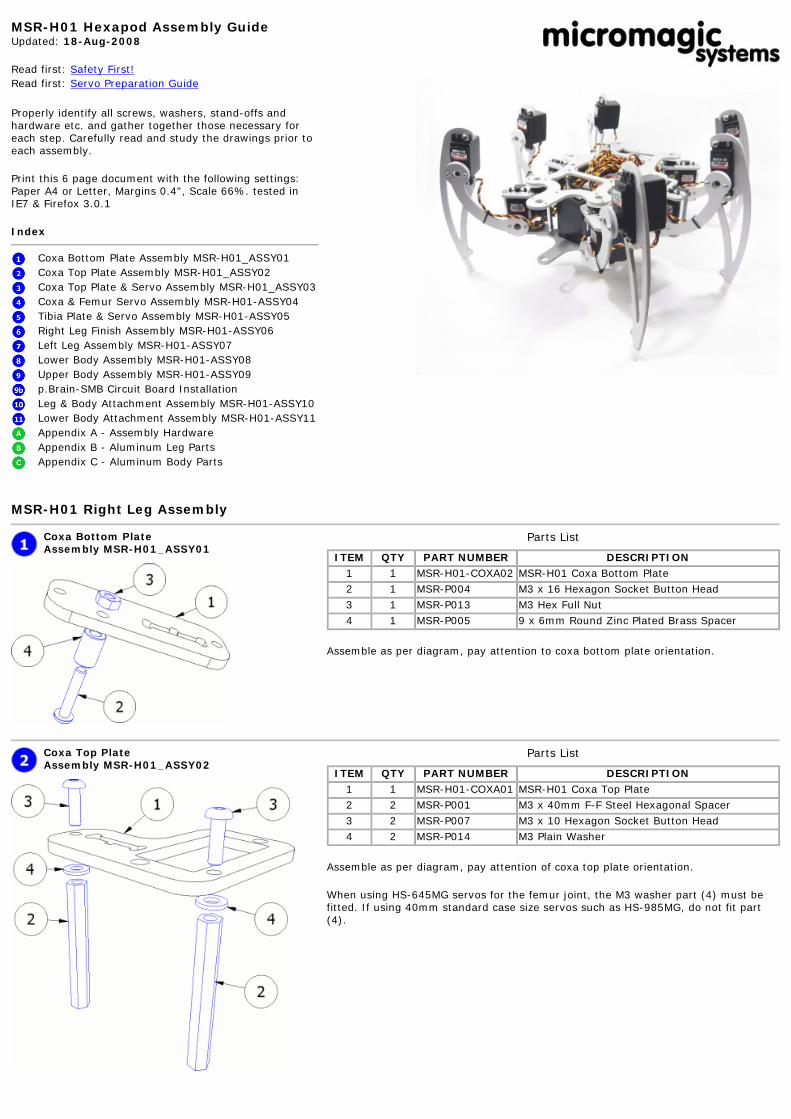
Coxa Bottom Plate Assembly MSR-H01_ASSY01
Parts List
ITEM QTY PART NUMBER DESCRIPTION1 1 MSR-H01-COXA02 MSR-H01 Coxa Bottom Plate 2 1 MSR-P004 M3 x 16 Hexagon Socket Button Head 3 1 MSR-P013 M3 Hex Full Nut 4 1 MSR-P005 9 x 6mm Round Zinc Plated Brass Spacer
Assemble as per diagram, pay attention to coxa bottom plate orientation.
Coxa Top Plate Assembly MSR-H01_ASSY02
Parts List
ITEM QTY PART NUMBER DESCRIPTION1 1 MSR-H01-COXA01 MSR-H01 Coxa Top Plate 2 2 MSR-P001 M3 x 40mm F-F Steel Hexagonal Spacer 3 2 MSR-P007 M3 x 10 Hexagon Socket Button Head 4 2 MSR-P014 M3 Plain Washer
Assemble as per diagram, pay attention of coxa top plate orientation.
When using HS-645MG servos for the femur joint, the M3 washer part (4) must be fitted. If using 40mm standard case size servos such as HS-985MG, do not fit part (4).

Coxa Top Plate & Servo Assembly MSR-H01_ASSY03
Parts List
ITEM QTY PART NUMBER DESCRIPTION1 1 MSR-H01-ASSY02 MSR-H01 Coxa Assembly 2 2 MSR-P006 M4 x 10 Hexagon Socket Button Head3 2 MSR-P012 M4 Hex Full Nut 4 1 MSR-HS225BB/MG Hitec HS-225BB or HS-225MG Servo 5 1 MSR-HSH24 Hitec 24mm Servo horn (from HS-225 servo) 6 1 MSR-HSSST Hitec Servo horn screw (from HS-225 servo)
The servo horn (5) must be removed in order to fit the coxa servo (4). Take care not to rotate the servo spline when unscrewing the horn retaining screw (6). After the servo (4) has been fitted, replace the horn (5) in the same position. Having re-fitted your servo horn, I strongly recommend that you re-check your coxa servo is still centered: Servo Preparation Guide
Pay attention to the servo orientation, the servo horn is at the end closest to the hexagonal spacers.
Coxa & Femur Servo Assembly MSR-H01-ASSY04
Parts List
ITEM QTY PART NUMBER DESCRIPTION1 1 MSR-H01-ASSY01 MSR-H01 Coxa assembly 2 2 MSR-P007 M3 x 10 Hexagon Socket Button Head 3 1 MSR-H01-ASSY02 MSR-H01 Coxa assembly 4 1 MSR-HS645MG Hitec HS-645MG Servo
Insert the femur servo (4) into the top coxa plate slot as shown with the servo horn towards the bottom coxa plate.
Tibia Plate & Servo Assembly MSR-H01-ASSY05
Parts List
ITEM QTY PART NUMBER DESCRIPTION1 1 MSR-H01-TIBIA MSR-H01 Tibia plate 2 2 MSR-P006 M4 x 10 Hexagon Socket Button Head3 2 MSR-P012 M4 Hex Full Nut 4 1 HS-645MG Hitec HS-645MG Servo
Assemble as per diagram, pay attention to the servo orientation, the servo horn is closest to the foot of the tibia.

Right Leg Finish Assembly MSR-H01-ASSY06
Parts List
ITEM QTY PART NUMBER DESCRIPTION1 1 MSR-H01-ASSY04 MSR-H01 Coxa assembly 2 1 MSR-H01-FEMUR MDR-H01 Femur plate 3 4 MSR-P008 N0.2 x 6.4mm Self tapping screw 4 1 MSR-H01-ASSY05 MSR-H01 Tibia assembly
Take great care when fitting self tapping screws (3). Use the correct size phillips screw driver to avoid slipping or damaging the screw head. Once fitted the servo horn should fit flush with the femur plate, if this is not the case, back the screws (3) off a couple of turns and then re-tighten. Fit the screws into the middle of the single row of three holes on the horn indicated below (A) & (B).
Although not necessary, the servo horn screw holes can be enlarged using a 1.5mm or 1/16" drill bit for easier screw installation.
You will need to build three right legs for your hexapod, so repeat steps 1 to 6 until all right legs are complete.
MSR-H01 Left Leg Assembly
Left Leg Assembly MSR-H01-ASSY07
You will need to assemble three left legs for your hexapod. As for the right leg, follow steps 1 to 6, however, build the left leg as a mirror of the right leg assembly. To ensure you get your coxa plate orientation correct, take a good look at the left leg pictures below and left.
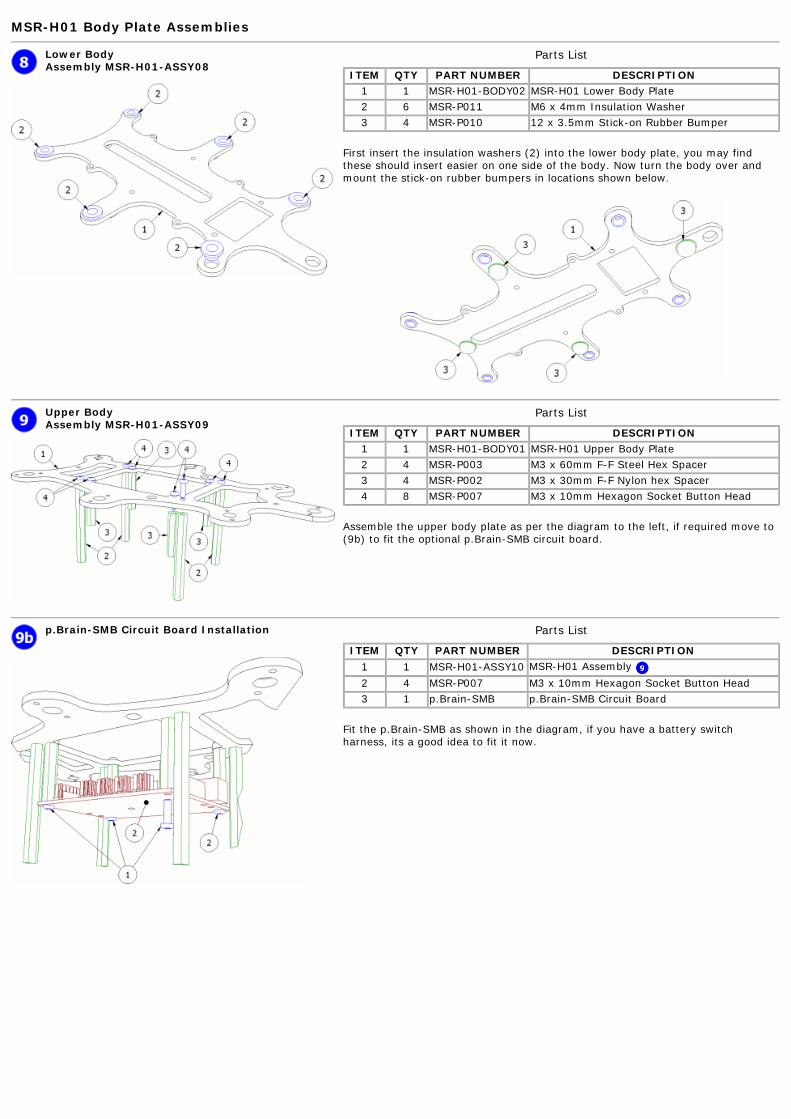
MSR-H01 Body Plate Assemblies
Lower Body Assembly MSR-H01-ASSY08
Parts List
ITEM QTY PART NUMBER DESCRIPTION1 1 MSR-H01-BODY02 MSR-H01 Lower Body Plate 2 6 MSR-P011 M6 x 4mm Insulation Washer 3 4 MSR-P010 12 x 3.5mm Stick-on Rubber Bumper
First insert the insulation washers (2) into the lower body plate, you may find these should insert easier on one side of the body. Now turn the body over and mount the stick-on rubber bumpers in locations shown below.
Upper Body Assembly MSR-H01-ASSY09
Parts List
ITEM QTY PART NUMBER DESCRIPTION1 1 MSR-H01-BODY01 MSR-H01 Upper Body Plate 2 4 MSR-P003 M3 x 60mm F-F Steel Hex Spacer 3 4 MSR-P002 M3 x 30mm F-F Nylon hex Spacer 4 8 MSR-P007 M3 x 10mm Hexagon Socket Button Head
Assemble the upper body plate as per the diagram to the left, if required move to (9b) to fit the optional p.Brain-SMB circuit board.
p.Brain-SMB Circuit Board Installation
Parts List
ITEM QTY PART NUMBER DESCRIPTION1 1 MSR-H01-ASSY10 MSR-H01 Assembly 2 4 MSR-P007 M3 x 10mm Hexagon Socket Button Head 3 1 p.Brain-SMB p.Brain-SMB Circuit Board
Fit the p.Brain-SMB as shown in the diagram, if you have a battery switch harness, its a good idea to fit it now.

MSR-H01 Final Assembly
Leg & Body Attachment Assembly MSR-H01-ASSY10
Parts List
ITEM QTY PART NUMBER DESCRIPTION1 1 MSR-H01-ASSY09 MSR-H01 Body Assembly 2 3 MSR-H01-ASSY06 MSR-H01 Right Leg Assembly 3 3 MSR-H01-ASSY07 MSR-H01Left Leg Assembly 4 12 MSR-P008 N0.2 x 6.4mm Self tapping screw
Attach right and left legs as shown in the diagram below and exploded detail left.
Take great care when fitting self tapping screws (3). Use the correct size phillips screw driver to avoid slipping or damaging the screw head. Once fitted the servo horn should fit flush with the femur plate, if this is not the case, back the screws (3) off a couple of turns and then re-tighten. Fit the screws into the middle of the single row of three holes on the horn indicated left (A) & (B).
Lower & Upper Body Attachment Assembly MSR-H01-ASSY11
Parts List
ITEM QTY PART NUMBER DESCRIPTION1 1 MSR-H01-ASSY11 MSR-H01 Assembly
2 1 MSR-H01-ASSY09 MSR-H01 Lower Body Assembly 3 4 MSR-P007 M3 x 10mm Hexagon Socket Button Head 4 6 MSR-P009 Rubber End Cap M5 x 13mm
Slide the bottom plate assembly (2) over the coxa bearings and fix in place. Add rubber end caps (4) to tarsus feet. This completes the MSR-H01 assembly.
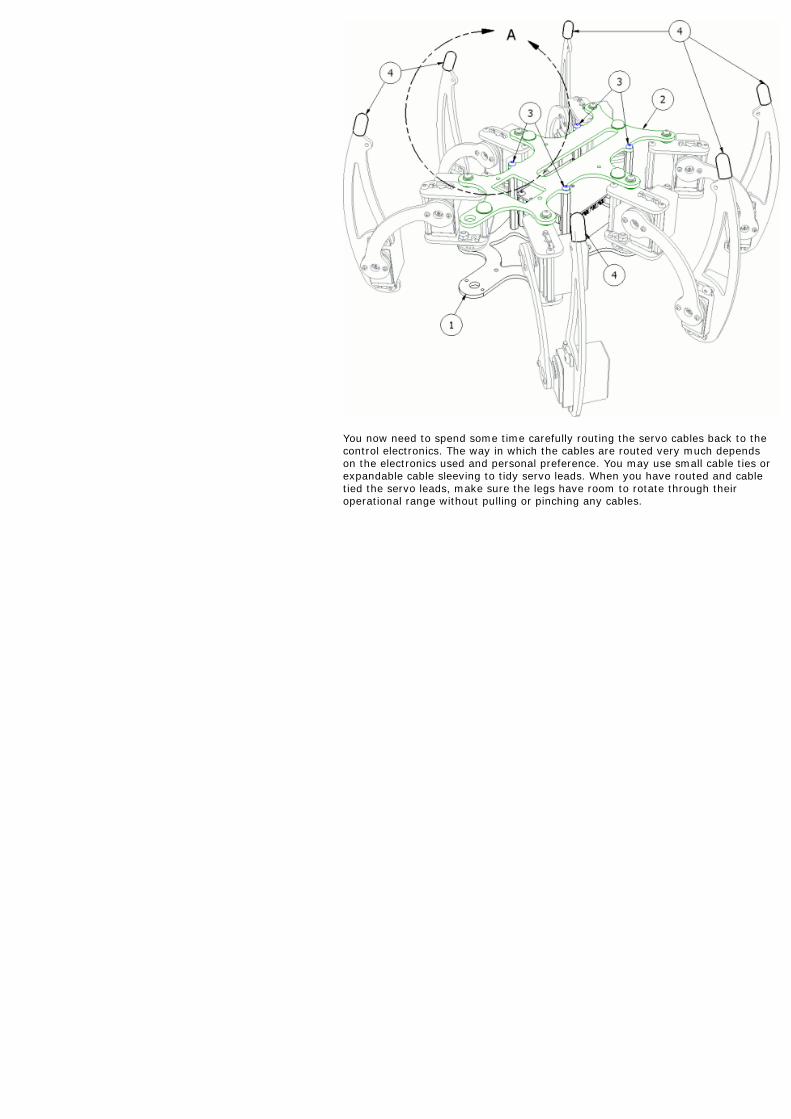
You now need to spend some time carefully routing the servo cables back to the control electronics. The way in which the cables are routed very much depends on the electronics used and personal preference. You may use small cable ties or expandable cable sleeving to tidy servo leads. When you have routed and cable tied the servo leads, make sure the legs have room to rotate through their operational range without pulling or pinching any cables.
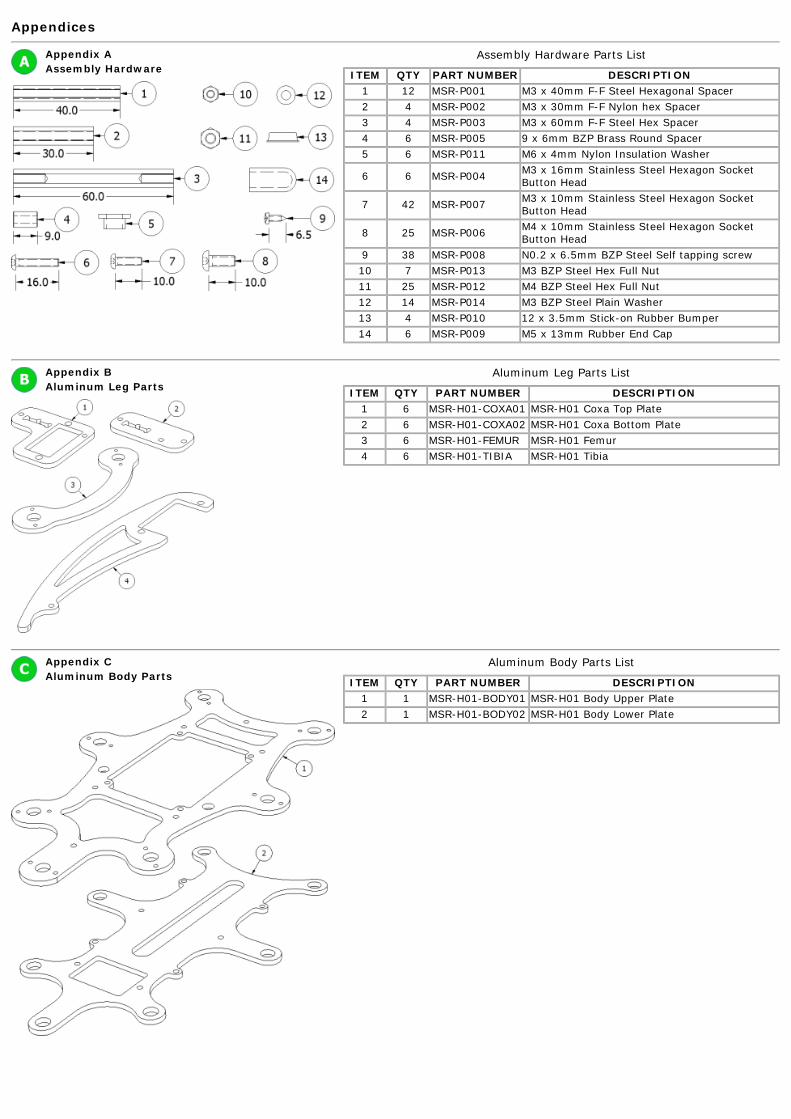
Appendices
Appendix A Assembly Hardware
Assembly Hardware Parts List
ITEM QTY PART NUMBER DESCRIPTION1 12 MSR-P001 M3 x 40mm F-F Steel Hexagonal Spacer 2 4 MSR-P002 M3 x 30mm F-F Nylon hex Spacer 3 4 MSR-P003 M3 x 60mm F-F Steel Hex Spacer 4 6 MSR-P005 9 x 6mm BZP Brass Round Spacer 5 6 MSR-P011 M6 x 4mm Nylon Insulation Washer
6 6 MSR-P004 M3 x 16mm Stainless Steel Hexagon Socket Button Head
7 42 MSR-P007 M3 x 10mm Stainless Steel Hexagon Socket Button Head
8 25 MSR-P006 M4 x 10mm Stainless Steel Hexagon Socket Button Head
9 38 MSR-P008 N0.2 x 6.5mm BZP Steel Self tapping screw 10 7 MSR-P013 M3 BZP Steel Hex Full Nut 11 25 MSR-P012 M4 BZP Steel Hex Full Nut 12 14 MSR-P014 M3 BZP Steel Plain Washer 13 4 MSR-P010 12 x 3.5mm Stick-on Rubber Bumper 14 6 MSR-P009 M5 x 13mm Rubber End Cap
Appendix B Aluminum Leg Parts
Aluminum Leg Parts List
ITEM QTY PART NUMBER DESCRIPTION1 6 MSR-H01-COXA01 MSR-H01 Coxa Top Plate 2 6 MSR-H01-COXA02 MSR-H01 Coxa Bottom Plate 3 6 MSR-H01-FEMUR MSR-H01 Femur 4 6 MSR-H01-TIBIA MSR-H01 Tibia
Appendix C Aluminum Body Parts
Aluminum Body Parts List
ITEM QTY PART NUMBER DESCRIPTION1 1 MSR-H01-BODY01 MSR-H01 Body Upper Plate 2 1 MSR-H01-BODY02 MSR-H01 Body Lower Plate