
What happens after death? - Welcome to LSE Research Online - LSE

UNIVERSIDAD DE BUENOS AIRES
FACULTAD DE INGENIERÍA
CARRERA DE MAESTRÍA EN SISTEMAS EMBEBIDOS
MEMORIA DEL TRABAJO FINAL
Módulo de Cómputo Embebidobasado en Cortex-A8
Autor:Esp. Ing. Pablo O. Ridolfi
Director:Esp. Ing. Alejandro J. Furfaro
Jurados:Mg. Ing. Diego Brengi (INTI)
Dr. Ing. Leandro Cymberknop (UTN-FRBA)Dr. Ing. Mariano Llamedo Soria (UTN-FRBA)
Este trabajo fue realizado en la Ciudad Autónoma de Buenos Airesentre febrero y diciembre de 2017.

I
Resumen
En este trabajo se presenta el diseño e implementación de un módulode cómputo embebido diseñado específicamente para aplicaciones industriales.Su hardware posee una estructura de procesamiento heterogéneo: por un ladobrinda soporte para requerimientos de propósito general como interfaz de usua-rio, conectividad, almacenamiento y gestión de datos mediante un subsistemabasado en el microprocesador ARM Cortex-A8, y por otro lado resuelve requeri-mientos de tiempo real con tiempo de respuesta determinístico con un subsistemabasado en el microprocesador ARM Cortex-M4. El software desarrollado para es-te módulo de cómputo provee los recursos necesarios para gestionar ambos sub-sistemas y expone al usuario una interfaz de programación de aplicaciones (API)que brinda las herramientas necesarias para controlar la ejecución del softwareen cada subsistema y la intercomunicación entre los mismos.
Para el desarrollo de este trabajo fueron fundamentales los conoci-mientos adquiridos en las materias Implementación de Sistemas Operativos I, Imple-mentación de Sistemas Operativos II e Implementación de Manejadores de Dispositivos,cuyos contenidos se aplicaron en el software implementado en cada subsistema,y las materias Certificación de Sistemas Electrónicos, Diseño de Circuitos Impresos yDiseño de Sistemas Críticos, cuyos criterios sentaron las bases para el diseño delhardware.

II
Agradecimientos
A Alejandro Furfaro, por su confianza y su Ejemplo.
A Ariel Lutenberg, que siempre está ahí cuando necesitamos su asistencia.
A Facundo Larosa, Fernando Aló y Nicolás Blanchet, colegas extraordinarios quehan sabido brindar su consejo y su experiencia.
A Gessica, a mi familia y a Lali, por acompañarme siempre.

III
Índice general
Resumen I
1. Introducción General 11.1. Contexto y justificación . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2. Motivación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.3. Objetivos y alcance . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2. Introducción Específica 42.1. Estructura general del sistema . . . . . . . . . . . . . . . . . . . . . . 4
2.1.1. Hardware . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42.1.2. Software . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.2. Requerimientos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.3. Planificación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
3. Diseño e Implementación 103.1. Hardware . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3.1.1. Estructura general del hardware . . . . . . . . . . . . . . . . 103.1.2. Módulo de cómputo - Subsistema de propósito general . . . 12
Costos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143.1.3. Placa base - Subsistema de tiempo real . . . . . . . . . . . . . 14
Costos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153.2. Software . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.2.1. Estructura general del software . . . . . . . . . . . . . . . . . 15Protocolo de RemoteMCU . . . . . . . . . . . . . . . . . . . . 16
3.2.2. Software para el subsistema de propósito general . . . . . . 183.2.3. Software para el subsistema de tiempo real . . . . . . . . . . 19
4. Ensayos y Resultados 214.1. Verificación del diseño de hardware . . . . . . . . . . . . . . . . . . 214.2. Ensayos funcionales para el subsistema de propósito general . . . . 224.3. Ensayos funcionales para el subsistema de tiempo real . . . . . . . 234.4. Resultados generales . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
5. Conclusiones 285.1. Conclusiones sobre el trabajo realizado . . . . . . . . . . . . . . . . 285.2. Próximos pasos y trabajo futuro . . . . . . . . . . . . . . . . . . . . . 29
A. Diagrama esquemático del módulo de cómputo 30
B. Diagrama esquemático de la placa base 37

IV
Índice de figuras
1.1. Diagrama en bloques general. . . . . . . . . . . . . . . . . . . . . . . 2
2.1. Diagrama de Gantt – Meses 1 a 3 . . . . . . . . . . . . . . . . . . . . 72.2. Diagrama de Gantt – Meses 4 a 6 . . . . . . . . . . . . . . . . . . . . 82.3. Diagrama de Gantt – Meses 7 a 10 . . . . . . . . . . . . . . . . . . . 9
3.1. Diagrama en bloques del subsistema de propósito general . . . . . 113.2. Módulo de cómputo diseñado. Incluye el subsistema de propósito
general y el subsistema de comunicaciones. . . . . . . . . . . . . . . 123.3. Estructura interna de un SiP de la familia OSD335x. . . . . . . . . . 133.4. Distribución de layers del PCB. . . . . . . . . . . . . . . . . . . . . . 133.5. Estructura del stackup provista por el fabricante. . . . . . . . . . . . 133.6. Placa base para el módulo de cómputo, incluye el subsistema de
tiempo real. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153.7. Esquema general del software RemoteMCU. . . . . . . . . . . . . . 163.8. Esquema de software para el subsistema de tiempo real o target. . . 19
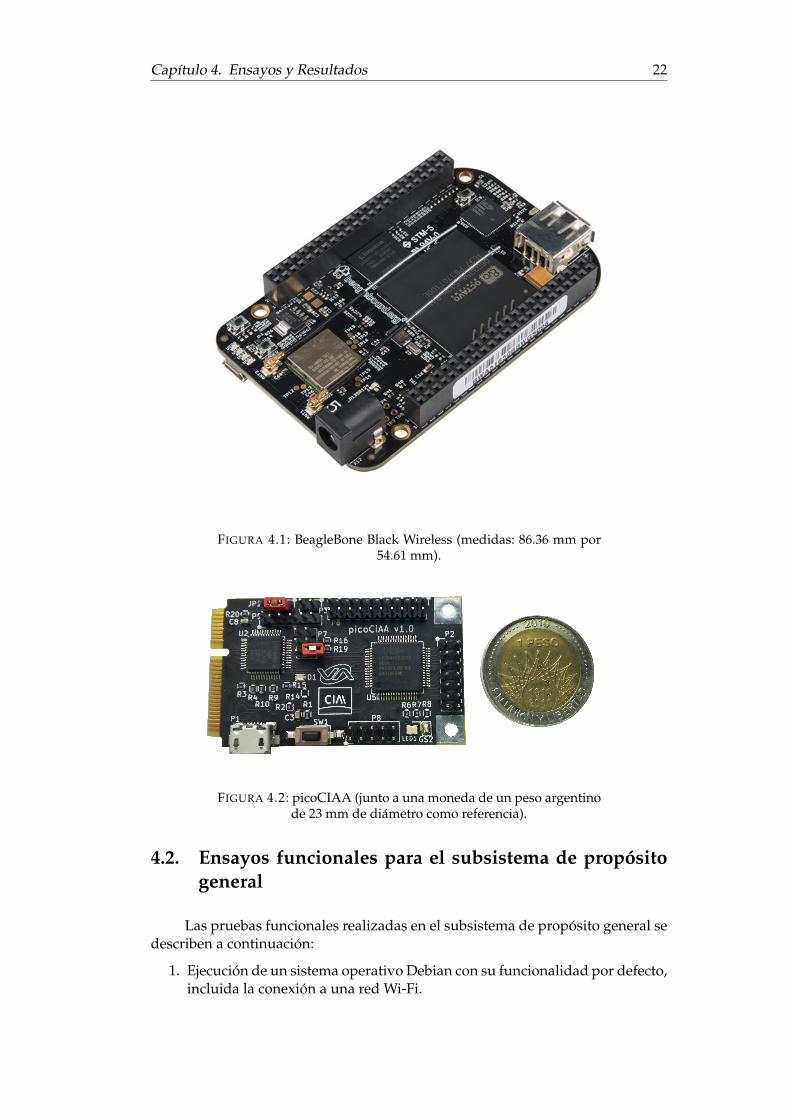
4.1. BeagleBone Black Wireless (medidas: 86.36 mm por 54.61 mm). . . 224.2. picoCIAA (junto a una moneda de un peso argentino de 23 mm de
diámetro como referencia). . . . . . . . . . . . . . . . . . . . . . . . . 224.3. Test del protocolo RMCU: Query del target y comienzo de descarga
de un nuevo firmware. . . . . . . . . . . . . . . . . . . . . . . . . . . . 244.4. Test del protocolo RMCU: Finalización de la descarga del firmware
y visualización de los eventos enviados por el target. . . . . . . . . . 24

V
Índice de Tablas
3.1. Comparativa de costos unitarios vs. cantidad para el módulo decómputo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.2. Comparativa de costos unitarios vs. cantidad para la placa base. . . 153.3. Estructura general de un paquete del protocolo RemoteMCU. . . . 173.4. Identificadores de paquete del protocolo RemoteMCU. . . . . . . . 173.5. Formato especial del campo data en los paquetes de tipo Evento. . 173.6. Parámetros de un callback de RMCU, válidos tanto para host como
para target. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
4.1. Revisión de hardware para el módulo de cómputo. . . . . . . . . . 254.2. Revisión de hardware para el módulo de cómputo (cont.). . . . . . 264.3. Revisión de hardware para el módulo de cómputo (cont.). . . . . . 27

VI
Dedicado a quienes invierten tiempo y energía en dejar atrásun mundo mejor que el que encontraron.

1
Capítulo 1
Introducción General
En este capítulo se presentan las características generales del trabajo realiza-do y bajo qué contexto se decidió enmarcarlo.
1.1. Contexto y justificación
En el marco del diseño e implementación de un sistema embebido indus-trial, particularmente al encarar el diseño de un «módulo de cómputo» (llamadotambién compute module o System-on-Module –SoM–) es cada vez es más frecuenteencontrarse con aplicaciones que imponen cuatro requerimientos excluyentes:
1. respuesta real-time (o tiempo real),
2. compatibilidad con el kernel Linux,
3. factor de forma que simplifique (y por lo tanto economice) el diseño delcircuito impreso del sistema, y
4. API1 accesible y amigable para interactuar con el hardware.
Diversos sistemas actuales basados en microcontroladores suelen abordarde manera óptima los requerimientos 1, 3 y 4 pero carecen de compatibilidadcompleta con Linux debido a restricciones en la capacidad de memoria y de pro-cesador[1]. Por otra parte, el uso de sistemas compatibles con Linux cumplen elrequerimiento 2 pero requieren un nivel de expertise por parte del implementa-dor que muchas veces lo empujan a descartar este tipo de soluciones debido a sucomplejidad. Este impedimento es todavía mayor si la aplicación suma requeri-mientos de tiempo real (real-time o RT, de ahora en adelante). Podrían mencio-narse excepciones como Raspberry Pi o Beagleboard que dan soporte para los tresrequerimientos pero solo a nivel hobby o community, es decir, foros de consulta singarantía de ninguna clase[2].
Teniendo en cuenta este contexto se plantea el objetivo primario de este tra-bajo final: el diseño de un SoM que provea al implementador de sistemas embe-bidos una solución integrada que aborde los cuatro requerimientos descritos enel párrafo anterior de la misma forma y con la misma facilidad que hoy le brindaun microcontrolador. Este SoM será capaz de ejecutar software basado en LinuxEmbebido así como firmware bare-metal con el objetivo de proporcionar com-portamiento RT. La Figura 1.1 presenta a grandes rasgos los componentes quetendrá el SoM. A su vez el factor de forma del SoM permitirá diseñar un PCB
1Application Programming Interface, Interfaz de Programación para el usuario.

Capítulo 1. Introducción General 2
base accesible con tecnología disponible actualmente en el mercado local, dondeel implementador ubicará los periféricos que requiera para su aplicación, mante-niendo al mínimo los componentes necesarios para que el SoM funcione. Por otraparte incluirá una característica adicional que hoy no está presente en gran partede los microcontroladores actuales: la capacidad de conectividad Wi-Fi y Blue-tooth para que la comunicación del sistema con el mundo exterior se realice demanera transparente y con mínima configuración. A continuación se describenlos componentes generales que tendrá el sistema:
PMIC (Power Management Integrated Circuit): Encargado de la gestión dela alimentación del microprocesador y sus memorias.
CPU: Unidad central de procesamiento encargada de las tareas de cómputo.Posee un subsistema de propósito general (GPSS) capaz de ejecutar progra-mas bare-metal y basados en Linux embebido, y un subsistema de tiemporeal (RTSS) para aplicaciones de tiempo real bare-metal o basadas en RTOS.
RAM y Flash: Memorias requeridas por el sistema.
Wi-Fi y BT: Módulo de comunicación Wi-Fi y Bluetooth.
I/O: Interfaces de entrada/salida (USB - GPIO - UART - I2C - SPI - ADC).
Finalmente es requisito deseable que el esquema de costos del SoM con-temple proveedores locales para su producción, puesta en marcha y posteriordistribución, con el objetivo de que su costo final refleje la realidad del mercadoelectrónico argentino.
PMICCPU
RAM Flash
Wi-FiBT
I/O
RTSSGPSS
FIGURA 1.1: Diagrama en bloques general.
1.2. Motivación
La motivación principal de este trabajo surgió luego de la experiencia ad-quirida durante el diseño del hardware de la Computadora Industrial AbiertaArgentina –CIAA–[3]. Dentro de la familia de hardware del Proyecto CIAA, ex-cepto por el modelo de Alto Costo Computacional CIAA-ACC[4], ninguna otraCIAA es capaz de ejecutar un sistema operativo basado en el kernel Linux queademás tenga la capacidad de soportar todas las aplicaciones de una distribu-ción completa. Es importante remarcar que la CIAA-NXP, al disponer de 8MB

Capítulo 1. Introducción General 3
de SDRAM externa, puede ejecutar una versión del kernel reducida en carac-terísticas pero no es suficiente para instalar servicios como Apache, Python yOpenCV[5] lo que imposibilita disponer de los recursos que hacen atractiva laopción de utilizar Linux por parte del desarrollador frente a una solución bare-metal o basada en un RTOS. Por otro lado la CIAA-ACC utiliza componentes degran capacidad de procesamiento pero cuyo costo supera el presupuesto para unmódulo de cómputo industrial frente a otros disponibles[6]. De allí surge la nece-sidad de diseñar un sistema de propósito general que a su vez tenga un esquemade costos más adecuado al mercado local.
Por este motivo se planteó, en el marco de un Proyecto de Investigación yDesarrollo (PID) llevado a cabo en el Laboratorio de Procesamiento Digital de laUTN-FRBA, diseñar un módulo de hardware que siga los lineamientos del Pro-yecto CIAA en cuanto a su aplicación industrial, pero que disponga de los recur-sos suficientes de CPU y memoria para ejecutar una distribución Linux completacomo Yocto, Buildroot, Angstrom o Debian. Al mismo tiempo, para dar sopor-te Real-Time y mantener compatibilidad con otros modelos de CIAA, se decidiótener en cuenta un subsistema integrado de alguna forma al CPU principal quepermita ejecutar aplicaciones bare-metal o con RTOS en forma autónoma, pero queacepten ser modificadas y/o reporten eventos al sistema principal –denominadode propósito general–.
1.3. Objetivos y alcance
El objetivo de este trabajo es diseñar un SoM que permita a la comunidadde electrónicos (estudiantes y profesionales) implementar un sistema compatiblecon Linux Embebido y aplicaciones de tiempo real minimizando la complejidaddel hardware base (periféricos), llevándolo al mismo nivel que requieren hoy endía las aplicaciones basadas en microcontroladores.
Respecto al alcance, se establecen los siguientes entregables:
Archivos de diseño del System-on-Module y de una placa base.
Firmware base para el subsistema Real-Time.
Software base para el subsistema de propósito general.
Memoria técnica.

4
Capítulo 2
Introducción Específica
En este capítulo se abordarán con mayor detalle las características del traba-jo realizado, así como sus requerimientos técnicos formales y la planificación delas tareas ejecutadas.
2.1. Estructura general del sistema
2.1.1. Hardware
Tal como se ha descripto en el capítulo 1, el hardware diseñado puede clasi-ficarse en dos grandes subsistemas:
1. El subsistema de propósito general que ejecutará aplicaciones basadas enun sistema operativo Linux.
2. El subsistema de tiempo real que ejecutará aplicaciones bare-metal o basadasen RTOS.
El subsistema de propósito general tendrá los siguientes componentes dehardware:
1. Microprocesador Cortex-A8 a 1GHz.
2. 512 MB de memoria RAM DDR3.
3. PMIC1 – Circuito Integrado de Gestión de Energía.
4. 4GB de memoria Flash eMMC para el sistema de archivos.
5. Módulo de comunicaciones Wi-Fi y Bluetooth.
6. Conectores de Entrada/Salida de uso industrial con interfaces GPIO, USB,I2C, SPI, ADC, Timers, PWM, JTAG y LCD.
Por otra parte, el subsistema de tiempo real consistirá de los siguientes com-ponentes:
1. Microcontrolador dual-core basado en Cortex-M4 y Cortex-M0 con interfazUSB para conectarse al subsistema de propósito general.
2. Interfaces de Entrada/Salida compatibles con la CIAA.
1Power Management Integrated Circuit.

Capítulo 2. Introducción Específica 5
2.1.2. Software
El software se puede clasificar de la misma forma que los subsistemas. Elsoftware que controlará el subsistema de propósito general tendrá las siguientescaracterísticas:
1. Sistema operativo Debian GNU/Linux con soporte para el microprocesadorelegido.
2. Biblioteca dinámica para comunicación con el subsistema de tiempo real.
Por otra parte, el software que ejecutará el subsistema de tiempo real dis-ponrá de los siguientes recursos:
1. Biblioteca BSP (Board Support Package) para controladores de periféricos delmicrocontrolador.
2. Soporte para aplicaciones bare-metal y con RTOS.
3. Biblioteca estática para comunicación con el subsistema de propósito gene-ral.
2.2. Requerimientos
A continuación se listan los requerimientos técnicos formales de este TrabajoFinal.
1. Requerimientos generales:
a) Entregables: Archivos de diseño, código fuente.
2. Requerimientos de hardware:
a) Placa de circuito impreso multicapa que admita ruteo de señales dealta frecuencia.
b) Factor de forma modular (SoM) para integrarse a un sistema industrialfabricable con tecnología disponible en el mercado local argentino.
c) Sistema microprocesador compatible con el kernel Linux.
d) Sistema de memorias DRAM y eMMC que admitirán un sistema ope-rativo Linux completamente funcional y proveerán almacenamientosuficiente para la aplicación del usuario.
e) Subsistema de tiempo real que permita abordar aplicaciones equiva-lentes a las que actualmente utilizan microcontroladores.
f ) Conectividad inalámbrica nativa Wi-Fi y Bluetooth.
g) Esquema de alimentación del SoM simplificada: solo serán necesarios+5V (CC).
h) No deberán ser necesarios componentes externos para el funciona-miento del SoM.
i) Interfaces de hardware: GPIO, ADC, UART, SPI, I2C y USB (host y de-vice).

Capítulo 2. Introducción Específica 6
j) Interfaz SDIO para almacenamiento adicional.
k) Interfaz LCD (display).
3. Requerimientos de firmware:
a) Firmware básico para puesta en marcha y validación del hardware.
b) Sistema Operativo: distribución GNU/Linux embebida.
c) Reprogramación, configuración y monitoreo del SoM una vez instala-do en campo a través de las interfaces inalámbricas.
4. Requerimientos de documentación:
a) Procedimiento para puesta en marcha del SoM.
b) Confección de una memoria técnica.
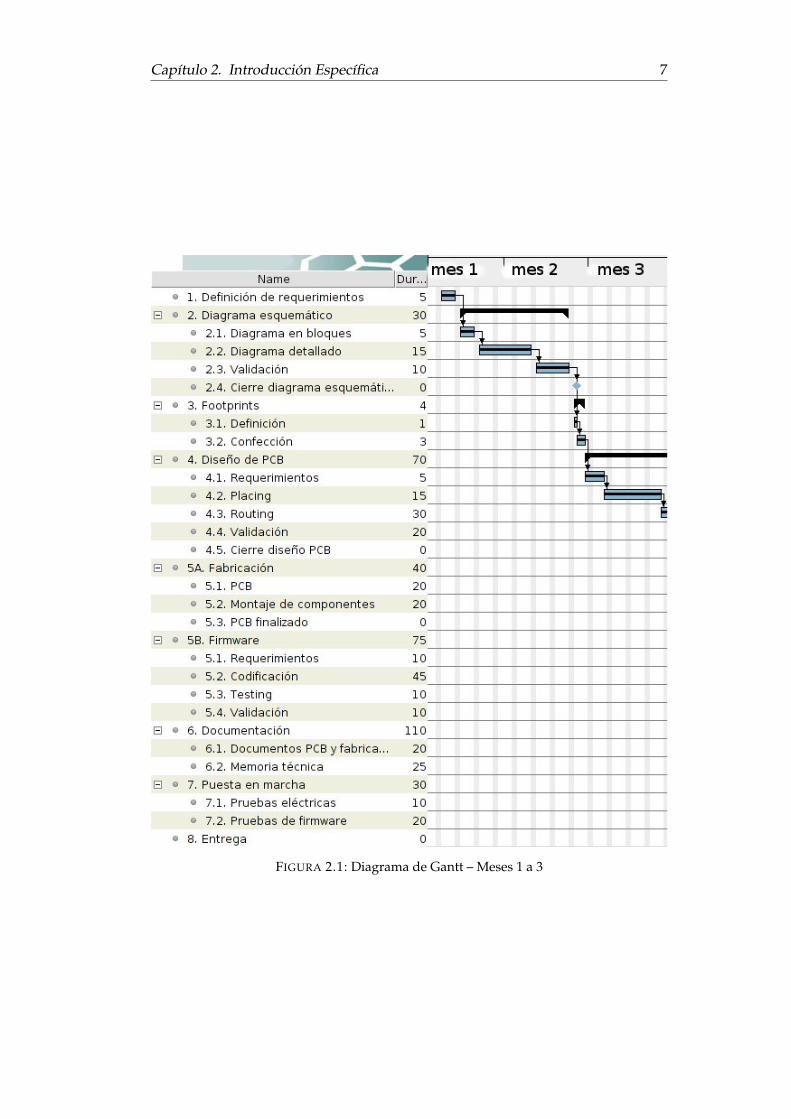
2.3. Planificación
En el diagrama de Gantt de las figuras 2.1, 2.2 y 2.3 se listan las tareas plani-ficadas y su tiempo estimado de ejecución en días.
Capítulo 2. Introducción Específica 7
FIGURA 2.1: Diagrama de Gantt – Meses 1 a 3

Capítulo 2. Introducción Específica 8
FIGURA 2.2: Diagrama de Gantt – Meses 4 a 6

Capítulo 2. Introducción Específica 9
FIGURA 2.3: Diagrama de Gantt – Meses 7 a 10

10
Capítulo 3
Diseño e Implementación
En este capítulo se abordará la descripción del hardware desarrollado y loscriterios que han sido tenidos en cuenta a lo largo del proceso de diseño.
3.1. Hardware
3.1.1. Estructura general del hardware
Al momento de definir la estructura general del hardware fue menester laelección de un proveedor del microprocesador para el subsistema de propósitogeneral. Se tuvieron en cuenta los siguientes criterios:
Disponibilidad y calidad de documentación.
Disponibilidad de diseños de referencia.
Soporte a nivel community, open-source hardware.
Experiencias previas de trabajo en el Laboratorio de Procesamiento Digital1.
Luego de descartar otros proveedores por no ofrecer soluciones open-sourceo no disponer de documentación detallada, las opciones se redujeron a dos:
la familia i.MX de NXP/Freescale, y
la familia AM335x de Texas Instruments,
ambas con similares características e información disponible. Finalmente seoptó por el SoC AM3358[7] debido a que existe mucha experiencia previa en elLaboratorio donde se desarrolló este trabajo.
Dentro de los diseños de referencia disponibles para la familia AM335xse optó por utilizar la BeagleBone Black Wireless[8], cuyo diseño incorpora unSystem-in-Package –SiP– OSD3358[9] que integra los siguientes componentes deeste subsistema:
el microprocesador (AM3358),
la memoria RAM DD3 (512MB), y
el PMIC, entre otros.
1Laboratorio de Procesamiento Digital de la UTN-FRBA –DPLab–.

Capítulo 3. Diseño e Implementación 11
Es necesario entonces agregar al diseño la memoria Flash eMMC, el contro-lador de comunicaciones inalámbricas WL1835MOD[10], las fuentes de alimenta-ción y demás componentes discretos necesarios para la integración de los bloquesmencionados, resumidos en la figura 3.1. El circuito impreso diseñado para estesubsistema puede observarse en la figura 3.2.
OSD3358CPU+SDRAM+PMIC
eMMC 4GBWL1835MOD
Wi-Fi Bluetooth
I/O USB MMC PWM LCD ADC
FIGURA 3.1: Diagrama en bloques del subsistema de propósito ge-neral
Para el caso del subsistema de tiempo real se decidió aprovechar la expe-riencia adquirida durante el desarrollo de la Computadora Industrial Abierta Ar-gentina. Para ello se desarrolló una placa base donde el subsistema de propósitogeneral irá conectado. En esta placa se expondrán las principales interfaces deambos subsistemas a modo de evaluación y se utilizará una conexión USB parala comunicación entre ellos.
La placa base con el subsistema de tiempo real cuenta con las siguientescaracterísticas:
microcontrolador LPC54114 dual-core Cortex-M4/Cortex-M0+.
alimentación externa de 12 a 24V (CC).
salidas de tensión para el usuario de 5V y 3.3V.
LEDs indicadores de estado del subsistema de propósito general y del detiempo real.
pinout compatible con extensiones de Arduino y Raspberry Pi2.
conectores de entrada y salida con las diferentes interfaces de ambos sub-sistemas.
2Arduino y Raspberry Pi son plataformas de desarrollo muy populares cuya adopción ha pro-visto al mercado local de una gran variedad de sensores, actuadores y otro hardware auxiliar conun factor de forma que se adapta a las plataformas mencionadas. Es por ello que se decidió seguirdicho factor de forma con el objetivo de aprovechar la oferta existente de hardware para nuevosdesarrollos.

Capítulo 3. Diseño e Implementación 12
3.1.2. Módulo de cómputo - Subsistema de propósito general
El módulo de cómputo diseñado posee un procesador Cortex-A8 en el SoCAM3358, tal como se ha mencionado en la sección 3.1.1. A su vez el SoC AM3358junto con la memoria SRAM principal y su PMIC se integran en el SiP OSD3358(IC1, ver figura 3.2), al cual se agregó la interfaz de comunicaciones (IC4) y lamemoria de almacenamiento (IC3).
FIGURA 3.2: Módulo de cómputo diseñado. Incluye el subsistemade propósito general y el subsistema de comunicaciones.
Durante los primeros meses de trabajo se diseñó una versión del módulo decómputo con el microprocesador, el PMIC y la memoria DDR ubicados en formadiscreta en el PCB. En ese momento se encontró el SiP OSD3358 que ya integrabalos tres componentes, más capacitores de desacople y otros pasivos varios, comopuede observarse en la figura 3.3. Frente a un costo similar al de los componentesdiscretos, la utilización del SiP permitió una reducción de la cantidad de layersdel PCB de 8 a 6 niveles, al mismo tiempo permitió relajar las reglas de diseñogracias a su pitch de 1.27 mm. Luego se continuó el diseño del diagrama esque-mático siguiendo los lineamientos provistos por Texas Instruments[11] y OctavoSystems[12]. El diagrama esquemático se adjunta como referencia en el apéndiceA.
Para el ruteo del PCB multicapa se siguió el material provisto por el inge-niero Herny Ott[13]. El stackup del PCB diseñado puede observarse en la figura3.4. Tal como indica Ott, se han tomado las precauciones necesarias en cuanto alos capacitores de desacople, y considerando que el SiP tiene sus capacitores dedesacople integrados, el efecto de separación de las capas de GND y alimenta-ción no debería ser significativo. La figura 3.5 muestra en detalle el esquema delstackup con el cual se fabricará el circuito impreso.

Capítulo 3. Diseño e Implementación 13
FIGURA 3.3: Estructura interna de un SiP de la familia OSD335x.
1. Señales de baja frecuencia 1
2. GND/AGND
3. Señales de alta frecuencia 1
4. Señales de alta frecuencia 2
5. Alimentación
6. Señales de baja frecuencia 2
FIGURA 3.4: Distribución de layers del PCB.
FIGURA 3.5: Estructura del stackup provista por el fabricante.
En cuanto al ruteo de alta velocidad se han destinado los layers internos alas siguientes señales:
buses USB (ruteados como par diferencial),
bus eMMC de la memoria Flash,
bus SDIO de la interfaz Wi-Fi,
bus HCI de la interfaz Bluetooth.

Capítulo 3. Diseño e Implementación 14
Costos
El análisis de costos del módulo de cómputo/subsistema de propósito ge-neral se llevó a cabo utilizando la herramienta kicost[14] y el proveedor PCBCart[15]. Un resumen de costos unitarios (FOB, en dólares estadounidenses) ver-sus cantidad de placas fabricadas se puede apreciar en la tabla 3.1. Para el montajese consideran precios promedio de proveedores argentinos.
Cant. Componentes PCB Montaje Total1 $90.70 $285.83 $50.00 $426.5310 $84.78 $35.48 $20.00 $140.26100 $77.00 $6.41 $15.00 $98.41
TABLA 3.1: Comparativa de costos unitarios vs. cantidad para elmódulo de cómputo.
El repositorio con los archivos de diseño del módulo de cómputo puede con-sultarse en [16]. Se utilizó el software KiCad[17] para llevar a cabo dicho diseño.
3.1.3. Placa base - Subsistema de tiempo real
El SoC AM3358 del módulo de cómputo dispone de dos unidades denomi-nadas Programmable Real-Time Unit Subsystem and Industrial Communication SubSys-tem –PRU-ICSS–[18] que originalmente fueron consideradas para formar el sub-sistema de tiempo real. Si bien existe soporte por parte del fabricante, a los efectosde este trabajo se optó por diseñar un subsistema de tiempo real externo teniendoen mente una mayor versatilidad por parte del usuario del módulo de cómputopara diseñar e integrar su propio subsistema y no depender exclusivamente delsoporte para PRU-ICSS. Se ha elegido la interfaz USB por su soporte a nivel dekernel Linux y de BSP para microcontroladores, además de dejar disponibles lasinterfaces I2C y SPI para el sistema al cual se integre el módulo de cómputo.
El diseño del circuito impreso para la placa base se realizó en dos layers. Seutilizó una fuente de alimentación DC-DC tipo step-down que permite alimentar elsistema con tensiones de 12 a 24 Volts (CC). Dispone de conectores que exponenlas diferentes señales del módulo de cómputo y del subsistema de tiempo real.También se incluyó un slot de tarjeta microSD que permite actualizar el sistemaoperativo del módulo de cómputo en caso de no disponer de una red Wi-Fi. Talcomo se describió en la sección 3.1.1 se decidió incluir un juego de conectorescompatibles con el factor de forma de las plataformas Arduino y Raspberry Pi.Finalmente, si bien el puerto USB Host presente en el módulo de cómputo estáconectado directamente al microcontrolador del subsistema de tiempo real, seoptó por dejar la interfaz USB disponible a través de un conector micro USB tipoAB, aunque no es posible utilizar esta interfaz y el subsistema de tiempo real ensimultáneo.
La figura 3.6 muestra una imagen de la placa base diseñada y en el apéndiceB se encuentra el diagrama esquemático completo de dicho circuito impreso.

Capítulo 3. Diseño e Implementación 15
FIGURA 3.6: Placa base para el módulo de cómputo, incluye elsubsistema de tiempo real.
Costos
Siguiendo el mismo procedimiento del módulo de cómputo, el análisis decostos de la placa base arrojó los resultados que se presentan en la tabla 3.2.
Cant. Componentes PCB Montaje Total1 $42.05 $82.13 $50.00 $174.1810 $39.39 $10.94 $20.00 $70.33100 $34.10 $3.04 $15.00 $52.14
TABLA 3.2: Comparativa de costos unitarios vs. cantidad para laplaca base.
El repositorio con los archivos de diseño de la placa base puede consultar-se en [19]. Al igual que el módulo de cómputo este diseño fue realizado con elsoftware KiCad.
3.2. Software
3.2.1. Estructura general del software
El conjunto de software que ejecutarán ambos subsistemas se ha denomi-nado «RemoteMCU» o «RMCU» en forma abreviada. La figura 3.7 plantea unesquema general, en el cual se puede visualizar la función primordial de cadasubsistema desde el punto de vista del software: por un lado las tareas de propó-sito general como una página web, una interfaz de usuario, una base de datos oel intercambio de datos en red; y por otro lado las tareas dedicadas al subsistemade tiempo real como medición de pulsos, PWM, detección de eventos esporádi-cos y respuesta determinista. A su vez el subsistema de propósito general tieneque ser capaz de detener la ejecución del software del subsistema de tiempo real,

Capítulo 3. Diseño e Implementación 16
cargarle un nuevo programa y ejecutarlo. Además es necesario que ambos sub-sistemas puedan intercambiar información a través de una estructura de datosdenominada evento, al que cualquier subsistema puede «suscribirse» y configu-rar la ejecución de un callback frente a su llegada.
Sistema Embebido Híbrido
Subsistema de propósito general
Subsistema de tiempo real
UI
Web
DB
Red
Sensor
Motor
PWM
HSIO
firmware
datos (eventos)
FIGURA 3.7: Esquema general del software RemoteMCU.
Los componentes principales de RemoteMCU son los siguientes:
API en lenguaje C a través de una shared library para el subsistema de pro-pósito general o host.
Bootloader para el subsistema de tiempo real o target que utiliza un driverUSB clase CDC/ACM[20] para comunicarse con el host.
API en lenguaje C para intercambio de datos a través de los mencionadoseventos para ambos subsistemas.
Protocolo de RemoteMCU
Se definió también un protoclo de comunicación entre subsistemas que pue-da implementarse sobre la clase CDC/ACM o bien cualquier comunicación serialen caso de no disponer de una interfaz USB en el subsistema de tiempo real. Elprotocolo consiste de diferentes tipos de paquete con una estructura común iden-tificable por los interlocutores (host y target en este caso) y fue creado tomando co-mo referencia el protocolo STK500 de Atmel[21] y el protocolo Modbus RTU[22].La estructura general de los paquetes se describe en la tabla 3.3 y a continuaciónse detalla el contenido de cada campo:
[start] byte de inicio de paquete, ASCII 0x3E ’>’.
[id] byte de identificador/tipo de paquete, ver tabla 3.4.
[seq] byte de número de secuencia (no signado, incremental).
[len] longitud de los datos contenidos en 2 bytes.
[data] datos o payload del paquete, cuya longitud se especificó en el campoanterior.
[check] CRC de 16 bits con polinomio x15 + x13 + 1. El CRC se calculasobre los campos start, id, seq, length y data.
[end] byte de fin de paquete, ASCII 0x3C ’<’.

Capítulo 3. Diseño e Implementación 17
start id seq length data check end’>’ 1 byte 1 byte 2 bytes (N) N bytes 2 bytes ’<’
TABLA 3.3: Estructura general de un paquete del protocolo Remo-teMCU.
id nombre descripción
0x00 QUERY_H2T
Consulta tipo ping3de host hacia target. El hostpuede enviar información adicional en el cam-po data, por ejemplo el tamaño total de la ima-gen de firmware si es que no entra en un únicopaquete.
0x80 QUERY_T2HConsulta tipo ping de target hacia host. El targetpuede enviar información adicional en el cam-po data, por ejemplo su número de serie.
0x01 FIRMWARE
El campo data contiene una imagen de firm-ware o parte de ella, en orden establecido porel campo seq. Si se recibe correctamente la ima-gen, el subsistema target debe ejecutarla.
0x81 FIRMWARE_ACKAcuse de recibo de un paquete FIRMWARE deltarget hacia el host.
0x02 EVENT_H2T
Envío de evento desde host hacia target. Si tar-get está suscripto al evento, ejecutar el callbackcorrespondiente con los datos recibidos comoparámetro.
0x82 EVENT_T2H
Envío de evento desde target hacia host. Si hostestá suscripto al evento, ejecutar el callback co-rrespondiente con los datos recibidos como pa-rámetro.
0x03 HALT_TARGET Detener la ejecución del programa remoto.0x04 START_TARGET Iniciar la ejecución del programa remoto.
TABLA 3.4: Identificadores de paquete del protocolo RemoteMCU.
Para el caso particular de los paquetes de tipo Evento (EVENT_*2*), el cam-po data toma el formato dado por la tabla 3.5, donde se especifica un identifica-dor de evento de 1 byte definido por el usuario, la longitud de los datos asociadosal evento en 2 bytes, seguida por dichos datos.
ev id ev data len ev data1 byte 2 bytes (M) M bytes
TABLA 3.5: Formato especial del campo data en los paquetes detipo Evento.
3por ping se refiere al envío de un paquete con el único objetivo de obtener una respuesta y asíverificar que el interlocutor se encuentra activo y en funcionamiento.

Capítulo 3. Diseño e Implementación 18
3.2.2. Software para el subsistema de propósito general
Para el subsistema de propósito general o host desde el punto de vista delprotocolo, se definió una biblioteca compartida o shared library que utiliza comobase las bibliotecas termios y pthread de Linux para implementar el protocolode RemoteMCU.
La API que dispone el programador del subsistema de propósito general sedescribe a continuación:
rmcu_open(path): Inicia una conexión al target conectado al puerto seriecon ruta path. Esta función abre el puerto especificado y queda a la esperade cualquier paquete válido que pueda llegar desde el target. rmcu_opendevuelve un identificador positivo dev que debe ser utilizado en las llama-das posteriores a la API o un número negativo en caso de error.
rmcu_exec(dev,firmware_path): Envía al target una imagen de firm-ware alojada en el archivo firmware_path y solicita su ejecución. Inter-namente, esta función envía un comando HALT_TARGET seguido de unQUERY_H2T con el tamaño del firmware como payload. Espera a que el targetresponda con QUERY_T2H indicando que está listo para recibir la imagen.Luego el host envía paquetes tipo FIRMWARE ordenados por el campo seqcuya cantidad puede variar en función del tamaño de la imagen. Una vezque la imagen es recibida, se envía nuevamente un paquete QUERY_H2Tpara determinar que el target se encuentra ejecutando el nuevo programa.
rmcu_event_subscribe(dev,event,callback): Función para suscri-birse a un evento del target, es decir para recibir datos del dispositivo remo-to. El host indica el número de evento en el parámetro event y un punteroa función que se ejecutará como callback al recibirse el evento. El prototipodefinido para los callbacks se especifica en la tabla 3.6. Internamente, estafunción ingresa una entrada a una tabla donde la biblioteca lleva registrodel número de evento suscripto y el callback que debe ejecutarse si el eventollega.
rmcu_event_send(dev,event,data,len): Envía datos a través de unevento hacia el target. Esta función crea un paquete tipo EVENT_H2T ad-juntando los datos recibidos (número de evento event, puntero data ylongitud len).
parámetro descripciónint dev Dispositivo que envió el evento.int ev Número de evento recibido (suscripto previamente).void * data Puntero a los datos asociados al evento.size_t len Longitud de los datos recibidos.
TABLA 3.6: Parámetros de un callback de RMCU, válidos tantopara host como para target.

Capítulo 3. Diseño e Implementación 19
3.2.3. Software para el subsistema de tiempo real
El soporte del protocolo RemoteMCU para el subsistema de tiempo real es-tá fuertemente ligado al tipo de hardware/microcontrolador o MCU4 que vaya autilizarse. Actualmente existe soporte para la familia de microcontroladores NXPLPC5411x y en particular para el modelo LPC54114 que es el utilizado actualmen-te como target según se describió en la sección 3.1.1. Dado que el soporte de NXP(biblioteca BSP) es fácilmente portable entre microcontroladores LPC de distintasfamilias, es posible extender el protocolo RMCU a los otros MCU utilizados en elProyecto CIAA, como el LPC4337, el LPC11U35 y el LPC54102.
La estructura del software para el subsistema de tiempo real se presenta enla figura 3.8. En ella se observa que el usuario dispone para su aplicación de labiblioteca BSP provista por el fabricante para acceso y control general de perifé-ricos, la API del protocolo RMCU como una biblioteca estática y opcionalmenteun Sistema Operativo de Tiempo Real o RTOS. Actualmente están soportados losRTOS FreeRTOS y FreeOSEK gracias a las contribuciones de diferentes usuarios alProyecto CIAA.
hardware - microcontrolador
RTOSprotoclo RMCU
BSP
bootloader / aplicación de usuario
FIGURA 3.8: Esquema de software para el subsistema de tiemporeal o target.
Es importante aclarar que solo la primera vez, frente a un microcontroladorque no fue inicializado o utilizado previamente, es necesario grabarle un progra-ma de arranque o bootloader. Dicho bootloader está incluido junto con el códigofuente de la biblioteca RMCU y se trata simplemente de un programa que inicia-liza el periférico configurado para la comunicación serie (USB clase CDC/ACMen este caso) y habilita el intérprete de paquetes del protocolo descripto en la sec-ción 3.2.1. Luego el host mediante la biblioteca mencionada enviará los paquetescon la imagen de firmware que vaya a ejecutar el target. Al compilar el firmwa-re mencionado con la biblioteca estática RMCU automáticamente el protocolo esinicializado antes de ejecutar el punto de entrada del usuario (función main) loque permitirá mantener en funcionamiento el intérprete de paquetes en caso quese quiera detener la ejecución del firmware o actualizarlo con una nueva imagen.
En el caso puntual de los microcontroladores LPC el grabado del bootloa-der puede realizarse de manera muy sencilla, incluso estando conectado al sub-sistema de propósito general, ya que estos microcontroladores disponen de otrobootloader en memoria de sólo lectura que es grabado durante la fabricación delchip. Si no se detecta un firmware válido en la memoria de programa principal,
4MCU: Micro Controller Unit, se utiliza como abreviatura de microcontrolador.

Capítulo 3. Diseño e Implementación 20
inicializa su interfaz USB como dispositivo MSC (Mass Storage Class o almace-namiento masivo) que permite grabar la imagen binaria del bootloader RMCUcopiando el archivo con dicha imagen mediante el comando dd de la línea decomandos bash disponible en el subsistema de propósito general. Una vez queel bootloader RMCU se encuentra grabado en el target puede utilizarse la bibliotecaRMCU tal como se describió en la sección 3.2.2.
La biblioteca estática RMCU disponible en el target es equivalente en fun-cionalidad a su contraparte dinámica en el host, pero con algunas diferencias quese describen a continuación:
rmcu_open no requiere ningún PATH. Se le pasa el parámetro NULL so-lamente por una cuestión de mantener compatible la estructura de la API.En el target esta función se encarga de inicializar la interfaz serial USB yel intérprete de paquetes. Tampoco es necesario llamar a esta función unavez iniciada la aplicación del usuario, ya que el protocolo es inicializadopreviamente a la ejecución de aquélla.
rmcu_exec está disponible en el target por una cuestión de compatibilidad,pero no realiza ninguna acción.
rmcu_event_subscribe y rmcu_event_send están disponibles en eltarget con la misma funcionalidad que se describió para el host con el objeti-vo de implementar el intercambio de datos entre ambos subsistemas.
De lo anterior se concluye que la aplicación de usuario en el subsistema detiempo real, en general, solo tendrá que utilizar las funciones rmcu_event_subscribey rmcu_event_send.
El repositorio con el código fuente de la biblioteca RemoteMCU puede con-sultarse en [23].

21
Capítulo 4
Ensayos y Resultados
En este capítulo se describen diferentes pruebas de verificación de hardwarey software, así como el análisis de los resultados obtenidos.
4.1. Verificación del diseño de hardware
Una vez finalizado el diseño del circuito impreso correspondiente al mó-dulo de cómputo, tal como se analizó durante la planificación de este trabajo, sepuso el mismo a consideración de dos colegas especializados en diseño de cir-cuitos impresos y ruteo de señales de alta velocidad: Nicolás Dassieu Blanchet yFernando Aló. Las tablas 4.1, 4.2 y 4.3 resumen el intercambio de observaciones ysus correcciones asociadas.
Además de la revisión de pares mencionada, se han llevado a cabo las vali-daciones eléctricas y de diseño (Electrical Rules Check o ERC y Design Rules Checko DRC) disponibles en el software KiCad. Todas las advertencias informadas pordicho software fueron corregidas tanto para el módulo de cómputo como para laplaca base antes de enviar el diseño a revisión.
Es importante remarcar que debido a la falta de fondos disponibles en el pre-supuesto del PID para el año 2017 no se dispuso de dinero suficiente para fabricarprototipos del módulo de cómputo y de la placa base, esto se debió en principioa que no se tuvo una idea precisa de los costos hasta Julio de 2017, cuando se die-ron por finalizados ambos diseños. Los mismos se podrán fabricar en 2018 conla previsión de costos que ya se dispone. Por eso los ensayos funcionales fueronrealizados a nivel de software con hardware de referencia, siendo utilizadas:
una Beaglebone Black Wireless[8] (figura 4.1) para ejecutar el software del sub-sistema de propósito general, y
una picoCIAA[24] (figura 4.2) para ejecutar el software del subsistema detiempo real.
Ambos subsistemas se conectaron a través de USB como prevé el protoco-lo RMCU. En el caso de la picoCIAA, dado que el microcontrolador principal–LPC54102– no dispone de interfaz USB, se desdobló el protocolo RMCU parael target en dos programas: El controlador USB CDC/ACM es ejecutado por elmicrocontrolador secundario de la picoCIAA –LPC11U35– que recibe los paque-tes enviados por el host y los transmite por una de las UART que está conectadadirecto al microcontrolador principal, donde se aloja el intérprete de paquetes yel bootloader.
Capítulo 4. Ensayos y Resultados 22
FIGURA 4.1: BeagleBone Black Wireless (medidas: 86.36 mm por54.61 mm).
FIGURA 4.2: picoCIAA (junto a una moneda de un peso argentinode 23 mm de diámetro como referencia).
4.2. Ensayos funcionales para el subsistema de propósitogeneral
Las pruebas funcionales realizadas en el subsistema de propósito general sedescriben a continuación:
1. Ejecución de un sistema operativo Debian con su funcionalidad por defecto,incluida la conexión a una red Wi-Fi.

Capítulo 4. Ensayos y Resultados 23
2. Descarga con git y compilación de la biblioteca RemoteMCU para host jun-to con una aplicación de ejemplo.
3. Instalación de un cross-compiler para el microcontrolador de la picoCIAAcon el objetivo de compilar la biblioteca RemoteMCU para target junto conel bootloader y una aplicación de ejemplo.
4. Descarga del bootloader a la picoCIAA mediante openocd (el microcontro-lador secundario dispone de un firmware CMSIS-DAP junto a la interfazCDC/ACM[25] desarrollado específicamente para la picoCIAA).
5. Utilizando la aplicación de ejemplo y la biblioteca RMCU en el host, descar-gar la aplicación del punto 3 al target. Suscribir eventos en ambos subsiste-mas e intercambiar información.
6. Mientras una aplicación en el target se está ejecutando, solicitar su detencióny actualizarla con una nueva aplicación.
Estas pruebas funcionales concluyeron satisfactoriamente. No se observaronresultados que infieran un comportamiento diferente del esperado para el sistemahost.
4.3. Ensayos funcionales para el subsistema de tiempo real
El subsistema de tiempo real fue sometido a las siguientes pruebas:
1. Ensayo de diferentes tamaños de paquete RMCU para la transferencia delfirmware con el objetivo de probar su rendimiento y minimizar la tasa depérdida de paquetes. Luego de varias pruebas se concluyó que el tamañoóptimo para el cual no es necesario retransmitir paquetes es de 64 bytes. Ca-be aclarar que este resultado es fuertemente dependiente del hardware, másque nada del tamaño de los buffers para los endpoints en el controlador USBdel LPC11U35. Un firmware mínimo requiere al menos enviar 170 paquetesde tipo FIRMWARE en forma satisfactoria (una imagen de aproximadamente10kB).
2. Utilización de diferentes mecanismos para interrumpir la ejecución del firm-ware actual en el target, actualizar dicho firmware y ejecutarlo. Finalmente sedecidió usar la excepción del sistema PendSV, que es utilizada por la biblio-teca para verificar la validez de la imagen recibida y proceder a su ejecución.
3. Prueba funcional de hardware a través del firmware descargado medianteRMCU: test básico de periféricos como GPIO y SysTick. Envío de paquetesQUERY_H2T para verificar que la interfaz serial y el intérprete de protocolosiguen en funcionamiento mientras se ejecuta el firmware.
4. Prueba de suscripción y envío de eventos desde y hacia el host.
Los ensayos del subsistema de tiempo real también concluyeron satisfacto-riamente. En particular los ítems 1 y 2 fueron los que más tiempo demandaronpero una vez definido el tamaño de paquete (ensayo 1) y el mecanismo de inte-rrupción por software (ensayo 2) el protocolo se comportó según lo esperado.

Capítulo 4. Ensayos y Resultados 24
4.4. Resultados generales
Luego de validar el diseño del hardware y las pruebas satisfactorias reali-zadas con las plataformas de referencia y el software RemoteMCU, se concluyeque una vez fabricados los prototipos será posible replicar sin inconvenientes losensayos de las secciones 4.2 y 4.3, ya que fueron diseñados para ser íntegramen-te compatibles con el hardware implementado descripto en la sección 3.1. En lasfiguras 4.3 y 4.4 se muestran imágenes del ensayo general de ambos subsistemasfuncionando en conjunto: el subsistema de propósito general actualiza el firmwa-re del subsistema de tiempo real y luego recibe eventos enviados por él.
FIGURA 4.3: Test del protocolo RMCU: Query del target y comien-zo de descarga de un nuevo firmware.
FIGURA 4.4: Test del protocolo RMCU: Finalización de la descargadel firmware y visualización de los eventos enviados por el target.

Capítulo 4. Ensayos y Resultados 25
ID Sch. Ver. Descripción Devolución Estado
1 Power v1.00
Si !SHDN de U3 seconecta a VDD_3V3Bno tiene sentido conec-tar VDD_5V y USB_DCal IN de U3 con dio-do dado que si nohay SYS_5V no hayVDD_3V3B.
Sí, porque los diodosestán por una cuestiónde corriente y no pa-ra poder prenderlo sinque haya VDD_5V.
OK
2 Power v1.00
¿Por qué está el regula-dor U1? La BeagleBoneno lo tiene, ¿es para su-ministrar una fuente de3V3B a la placa que seconecte y no tocar los3V3B del OSD3358?
Sí. OK
3 Power v1.00
Si 3V3B se suministrapor U1, la alimentaciónde U4 depende ahorade que 3V3A esté pren-dida (enable de U1) es-to difiere del esque-mático de la BeagleBo-ne, ¿puede traer proble-mas?
3V3A prende antes que3V3B por ende no. Asu vez U4 es una EE-PROM para el usuario,no es un componentecrítico de arranque.
OK
4 Power v1.00
Faltan circuitos declampeo en 3V3B y3V3A (TLVH431), ¿porqué?
Circuitos de clampingagregados.
OK
5 Power v1.00
Recomendación: Co-nectar 3V3B del OSD atodos los chips de 3V3Bde esta placa y usar elregulador U1 solo parasuministrar energíaa la placa hija que seconecta a esta placa.
U1 no se monta. Los3.3V auxiliares quedanbajo responsabilidad dela placa base. 3V3B sa-len del OSD (puentearJ3). Lo dejamos igual enel PCB y lo quitaremosen una futura revisión.
OK
6 Main v1.00Sugerencia: Colocarversión del hardwareen rótulo.
Hecho. OK
7 Main v1.00
Sugerencia: Colocar untexto indicando suge-rencias de ruteo co-mo corrientes en losnodos de potencia (ejVBAT, VDD_5V) y sihay pistas con impe-dancia controlada.
Se verificaron al mo-mento de rutear perono se agregaron textosexplicativos.
Pend.
TABLA 4.1: Revisión de hardware para el módulo de cómputo.

Capítulo 4. Ensayos y Resultados 26
ID Sch. Ver. Descripción Devolución Estado
8 Power v1.00
Sugerencia: Agregar elled de PWR conectadoa 3V3Aux de la beagle-bone para mostrar quela placa está encendida.
Hecho. OK
9 Power v1.00VRTC no va a ningúnlado. ¿Es un test point?
Agregado testpoint pa-ra VRTC.
OK
10 Power v1.00 Agregar testpoints.Agregados en VRTC,PCM y señales de inte-rés.
OK
11 ADC v1.00
Sugerencia: Dejar laposibilidad de la placahija pueda poner unaVREFP_ADC distin-ta de VDD_ADC, esdecir enviarla hasta elconector.
VERFP se conectaa VDD_ADC segúnlo sugerido por elfabricante.
N/A
12 ADC v1.00
Sugerencia: No mez-clar señales digitales deun lado y de conectorcon señales analógicasdel otro (AN0. . . AN7).Idealmente poner ANen ambos lados shiel-deadas por AGND yluego DGND en los ex-tremos.
En una versión futurase dedicará un conectora las señales analógicas.
N/A
13 USB v1.00
Datasheet TPD4S012sección 10.1 layoutguidelines, estos chipsdeben ponerse lo máscerca del conector USBposible, en este caso elconector va en la placahija, a mi entenderestas protecciones vanen la placa hija. En laBeagle los ponen por-que tiene los conectoresen la misma placa.Esto para mí incluyetambién a L2.
Correcto. Se remuevenprotecciones de líneasUSB y se colocan enplaca base.
OK
TABLA 4.2: Revisión de hardware para el módulo de cómputo(cont.).

Capítulo 4. Ensayos y Resultados 27
ID Sch. Ver. Descripción Devolución Estado
14 LCD v1.00
Resistencias en se-rie con LCD_PCLK,LCD_VSYNC,LCD_HSYNC,LCD_DE ¿quedanpara ser colocadas en laplaca base?
No está previsto utili-zar la interfaz LCD eneste trabajo, de utilizar-se se colocarían en pla-ca base.
N/A
15 JTAG v1.00
Resistencias de pull-up/pull-down ycapacitores del JTAG,¿no conviene ponerlasen esta placa? Pasa algosi todos los pines delJTAG quedan volando?
Se colocaron en placabase. El módulo no fuediseñado para ser uti-lizado sin placa baseaunque se tomará encuenta para la próximarevisión.
N/A
16 Sys v1.00
Posible Error:GPIO1_28 conecta-do a V17, VR14 y U18del integrado IC1A.
Corregido. OK
17 PCB v1.00Alinear conectores IO1e IO2.
Corregido. OK
18 PCB v1.00Verificar stackup con elfabricante.
Verificado. OK
TABLA 4.3: Revisión de hardware para el módulo de cómputo(cont.).

28
Capítulo 5
Conclusiones
En esta sección se detalla cómo los resultados obtenidos en el capítulo 4 im-pactaron en el aprendizaje del diseño de sistemas embebidos y qué conocimientosgeneraron en el marco del Proyecto de Investigación y la Maestría cursada duran-te 2017, permitiendo estimar un plan de trabajo para el año 2018.
5.1. Conclusiones sobre el trabajo realizado
Es importante mencionar que el imprevisto causado por la falta de presu-puesto para la fabricación de los prototipos marcó un hito inesperado mientrasse transitaba aproximadamente la mitad del desarrollo planificado. Los mesesque iban a ser destinados mayoritariamente a la puesta en marcha del hardwa-re terminaron siendo replanificados para el desarrollo y validación del protocoloRemoteMCU (sección 3.2.1), que originalmente no estaba previsto en el alcancedel presente trabajo sino que había sido planificado dentro de las tareas a rea-lizar durante 2018. El protocolo implementado es fácilmente extensible a otrasplataformas siempre que cumplan los siguientes requisitos mínimos:
Los interlocutores deben poseer una interfaz serial para comunicarse entresí. Dicha interfaz puede ser física como una UART, I2C o SPI, o virtual comoen el caso de USB CDC/ACM.
Los interlocutores pueden estar utilizando software basado en el kernel Li-nux, pero se ha demostrado que el protocolo es lo suficientemente livianopara ser ejecutado con idéntica funcionalidad en un microcontrolador. Aho-ra bien, si el sistema de propósito geneal ejecuta Linux puede comunicarseen simultáneo con distintos targets, ya que el kernel los identifica individual-mente gracias a su estructura de controladores de dispositivo: cada micro-controlador aparecerá como un char device en el directorio /dev del sistemahost.
Por otra parte, la API de la biblioteca RemoteMCU es simple y contiene lasfunciones mínimas necesarias para comunicar entre sí a los subsistemas, cum-pliendo el requerimiento de presentar al usuario una interfaz limpia y sencilla.
Respecto al hardware del módulo de cómputo, se ha adquirido una expe-riencia significativa a lo largo de este trabajo, en particular mientras se cursaba lamateria Certificación de Sistemas Electrónicos donde se realizó una heurística parael diseño de circuitos impresos[26] en la cual se analiza detalladamente la normaIPC-2221A[27] y se realizan análisis prácticos que derivan en consejos y suge-rencias a la hora de diseñar una placa de circuito impreso teniendo en cuenta el

Capítulo 5. Conclusiones 29
ecosistema de procesos que acompañan el diseño, como la fabricación y el mon-taje. Estas cuestiones permitieron sumar know-how sumamente relevante para elpresente trabajo y para los pasos a seguir. También fue muy enriquecedor el in-tercambio de correcciones y comentarios al diseño del módulo de cómputo porparte de colegas (sección 4.1): la conclusión más importante a la que se arribó esque cuando se cuenta con la asistencia de profesionales con experiencia en diseñode hardware es posible mejorar significativamente el resultado del trabajo reali-zado; además no es conveniente que una sola persona se involucre en un diseñode características que implican un circuito impreso de múltiples capas y el ruteode señales diferenciales y de alta frecuencia, al menos no sin asistencia y revisiónde pares.
5.2. Próximos pasos y trabajo futuro
El módulo de cómputo ya dispone de una aplicación específica a ser imple-mentada durante el año 2018: en el Laboratorio de Procesamiento Digital se dise-ñará un adquisidor de señales analógicas configurable para diversos tipos de señalesen las que trabajan los diferentes grupos de investigación del Departamento deIngeniería Electrónica de la UTN-FRBA. Este adquisidor será íntegramente pro-gramable y permitirá ejecutar simulaciones (que actualmente requieren de unaPC) dentro del mismo adquisidor gracias al software GNU Octave[28] que actual-mente está disponible en la distribución Debian GNU/Linux, que es compatiblecon el hardware desarrollado. Un aspecto importante a mencionar es que se estáplaneando utilizar el SiP OSD3358-SM que fue lanzado al mercado en Septiembrede 2017[29] en lugar del OSD3358 que actualmente posee el módulo de cómputo.El modelo OSD3358-SM permitirá un diseño más compacto e incluso es probableque requiera menos de 6 capas de señal en el circuito impreso1, lo cual podríareducir el costo del hardware manteniendo la misma funcionalidad.
En conclusión, el hardware y software diseñados e implementados duran-te este Trabajo Final abrieron las puertas para seguir invirtiendo recursos en eldesarrollo e ingeniería de hardware nacional con el ánimo de seguir brindandomaterial de calidad en forma libre y abierta a la comunidad argentina de profe-sionales de la electrónica, tanto a nivel académico como industrial.
1El asunto de la reducción de capas aún debe ser estudiado en detalle dado que es indispensableasegurar la integridad de las señales analógicas muestreadas por el adquisidor.

30
Apéndice A
Diagrama esquemático delmódulo de cómputo
A continuación se presenta el diagrama esquemático completo del módulode cómputo desarrollado.

1 2 3 4 5 6
1 2 3 4 5 6
A
B
C
D
A
B
C
D
Date: 2017-06-21KiCad E.D.A. kicad no-vcs-found-05ab44f61ubuntu16.04.1
Rev: 1.00Size: A4Id: 1/6
Title: MateboardFile: mateboard.schSheet: /DPLab@UTN-FRBADirector: Alejandro FurfaroRevisor: Nicolás Dassieu BlanchetAutor: Pablo Ridolfi
Power Management
power.sch
PWR_BUT
I2C0_SCLI2C0_SDA
BATBAT_SENSEBAT_TS
PMIC_PGOODLDO_PGOOD
PMIC_INTPMIC_nWAKEUP
USB-UART-WL-BT-GPIO
usb.sch
USB0_IDUSB1_VBUS
USB1_OCnUART0_RXDUART0_TXD
WL_EN.SIPBT_EN.SIP
WL_SDIO_D2.SIPWL_SDIO_D1.SIP
WL_SDIO_CMD.SIP
WL_SDIO_D3.SIP
WL_SDIO_CLK.SIPBT_HCI_TX.SIPBT_HCI_RX.SIP
WL_SDIO_D0.SIP
WL_IRQ.SIPBT_HCI_RTS.SIPBT_HCI_CTS.SIP
SD_BOOT
LCD_PCLKLCD_VSYNCLCD_HSYNC
LCD_DE
GPIO3_21SPI1_CLK
SPI1_D0SPI1_D1
SPI1_CS0GPIO3_19
GPIO0_7
AIN0AIN1AIN2AIN3AIN4AIN5AIN6AIN7
UART2_TXDUART2_RXD
I2C1_SDAI2C1_SCL
UART1_TXDUART1_RXDI2C2_SDAI2C2_SCL
LCD_DATA0LCD_DATA1LCD_DATA2LCD_DATA3LCD_DATA4LCD_DATA5LCD_DATA6LCD_DATA7LCD_DATA8LCD_DATA9LCD_DATA10LCD_DATA11LCD_DATA12LCD_DATA13LCD_DATA14LCD_DATA15
LS_BUF_OE.SIP
USB0_D+USB0_D-
USB1_D+USB1_D-
SYS_RESETn
References:http://processors.wiki.ti.com/index.php/AM335x_Hardware_Design_Guidehttp://processors.wiki.ti.com/index.php/AM335x_Schematic_Checklisthttps://github.com/beagleboard/beaglebone-black-wireless
VBATVBAT_SENSEVBAT_TEMP
PWR_BUT
I2C0_SDAI2C0_SCL
CPU Power
cpu_power.sch
System-eMMC-GPIO
system.sch
CLKOUT2CLKOUT1
PMIC_nWAKEUP
PMIC_PGOODLDO_PGOOD
eHRPWM1AeHRPWM1BeHRPWM2AeHRPWM2B
TIMER7TIMER6TIMER4TIMER5
JTAG_EMU1JTAG_EMU0JTAG_TDOJTAG_TCKJTAG_TDIJTAG_TMSJTAG_TRSTn
SD.D3SD.D2SD.D1SD.D0
SD.CMDSD.CLK
SD.CD
USR0USR1USR2USR3
PMIC_INT
UART4_RXDUART4_TXD
GPIO1_28GPIO2_1
GPIO0_26GPIO0_27GPIO1_12
GPIO1_13GPIO1_14
GPIO1_15USB1_OCn
GPIO1_16GPIO1_29
GPIO1_25GPIO2_0
SYS_RESETn
GPIO1_17GPIO1_27
Wi-Fi BLE
wifi.sch
CLKOUT2
WL_SDIO_D0.CPUWL_SDIO_D1.CPUWL_SDIO_D2.CPUWL_SDIO_D3.CPU
WL_SDIO_CLK.CPUWL_SDIO_CMD.CPU
BT_HCI_TX.CPU
WL_EN.CPUBT_EN.CPU
BT_HCI_CTS.CPU
BT_HCI_RX.CPU
BT_HCI_RTS.CPUWL_IRQ.CPU
LS_BUF_OE.CPU
CLKOUT2
CLKOUT2
1 23 45 67 89 10
20
30
40
50
60
70
11
21
31
41
51
61
12
22
32
42
52
62
13
23
33
43
53
63
14
24
34
44
54
64
15
25
35
45
55
65
16
26
36
46
56
66
17
27
37
47
57
67
18
28
38
48
58
68
19
29
39
49
59
69
J1
IO1
1 23 45 67 89 10
20
30
40
50
60
70
11
21
31
41
51
61
12
22
32
42
52
62
13
23
33
43
53
63
14
24
34
44
54
64
15
25
35
45
55
65
16
26
36
46
56
66
17
27
37
47
57
67
18
28
38
48
58
68
19
29
39
49
59
69
J2
IO2
VDD_5V
USB_DC
VDD_5V
PWR_BUT
VBAT
VBAT_SENSEVBAT_TEMP
GNDD
USB0_D-USB0_D+USB0_ID
USB0_D-USB0_D+USB0_ID
USB1_VBUS
USB1_D-USB1_D+
USB1_VBUSGNDD
UART0_RXDUART0_TXD
UART0_RXDUART0_TXD
GNDD
UART1_RXDUART1_TXD
UART1_RXDUART1_TXD
UART2_RXDUART2_TXD
UART2_RXDUART2_TXDSD_BOOT
SD_BOOT SYS_RESETn
SD.D3SD.D2SD.D1SD.D0
SD.CMDSD.CLK
SD.CD
SD.D3SD.D2SD.D1SD.D0
SD.CMDSD.CLKSD.CD
USR0USR1USR2USR3
USR0USR1USR2USR3
GNDD
CLKOUT2
CLKOUT1
CLKOUT1
GNDD
UART4_RXDUART4_TXD
UART4_RXDUART4_TXD
JTAG_EMU1JTAG_EMU0JTAG_TDOJTAG_TCKJTAG_TDIJTAG_TMSJTAG_TRSTn
JTAG_EMU1JTAG_EMU0
JTAG_TDOJTAG_TCKJTAG_TDI
JTAG_TMSJTAG_TRSTn
GPIO2_0GPIO1_25
GPIO2_0
GPIO1_25
GPIO1_29GPIO1_16GPIO1_15
GPIO1_29
GPIO1_16
GPIO1_15
GPIO1_13GPIO1_14
GPIO1_13
GPIO1_14
GPIO1_12GPIO0_27GPIO0_26
GPIO2_1GPIO1_28
GPIO1_12GPIO0_27
GPIO0_26
GPIO2_1
GPIO1_28GNDD
GNDD
I2C0_SDAI2C0_SCL
GNDD
TIMER6
TIMER5TIMER4
TIMER7
TIMER6TIMER5
TIMER4TIMER7
eHRPWM2BeHRPWM2AeHRPWM1BeHRPWM1A
eHRPWM2B
eHRPWM2A
eHRPWM1B
eHRPWM1A
GNDD
I2C2_SCLI2C2_SDA
I2C2_SCLI2C2_SDA
I2C1_SDAI2C1_SCL
I2C1_SDAI2C1_SCL
GNDD
GNDD
LCD_DELCD_PCLKLCD_VSYNCLCD_HSYNCLCD_DATA0LCD_DATA1LCD_DATA2LCD_DATA3LCD_DATA4LCD_DATA5LCD_DATA6LCD_DATA7LCD_DATA8LCD_DATA9LCD_DATA10LCD_DATA11LCD_DATA12LCD_DATA13LCD_DATA14LCD_DATA15
LCD_DELCD_PCLK
LCD_VSYNCLCD_HSYNCLCD_DATA0LCD_DATA1LCD_DATA2LCD_DATA3LCD_DATA4LCD_DATA5LCD_DATA6LCD_DATA7LCD_DATA8LCD_DATA9
LCD_DATA10LCD_DATA11LCD_DATA12LCD_DATA13LCD_DATA14LCD_DATA15
GNDD
SPI1_CLKSPI1_D0SPI1_D1
SPI1_CS0
SPI1_CLKSPI1_D0SPI1_D1
SPI1_CS0
GPIO0_7GPIO3_21
GPIO0_7GPIO3_21
GPIO3_19
GPIO3_19
AIN0AIN1AIN2AIN3AIN4AIN5AIN6AIN7
GNDD
AIN0
AIN1
AIN2
AIN3
AIN4
AIN5
AIN6
AIN7
GNDA
GNDA
VDD_ADC
GNDD
VDD_3V3B
SYS_5V
GNDD
GNDA
GNDA
GNDA
GNDA
GNDA
GNDA
GPIO1_27GPIO1_17
GPIO1_27
GPIO1_17
GNDD
GNDD
MH1 MH2 MH3 MH4
USB1_D-USB1_D+

1 2 3 4 5 6
1 2 3 4 5 6
A
B
C
D
A
B
C
D
Date: 2017-06-23KiCad E.D.A. kicad no-vcs-found-05ab44f61ubuntu16.04.1
Rev: 1.00Size: A4Id: 2/6
Title: MateboardFile: power.schSheet: /Power Management/DPLab@UTN-FRBADirector: Alejandro FurfaroRevisor: Nicolás Dassieu BlanchetAutor: Pablo Ridolfi
SYS_5V
C3
10uF/6.3V
GNDD
C9
10uF/6.3V
GNDD
USB_DC
VDD_5V
PWR_BUTI2C0_SCLI2C0_SDA
BAT
BAT_SENSEBAT_TS
C1
2.2uF/6.3V
GNDDGNDD
VDD_3V3ASYS_5V
C4
100nF/6.3V
GNDD
VDD_3V3B
VIN1
GN
D2
SHDN3 ADJ 4
VOUT 5
U1AP2112K-3.3TRG1
C7
2.2uF/6.3V
GNDD
C2
2.2uF/6.3V
GNDDGNDD
C5
100nF/6.3V
GNDD
VIN1
GN
D2
SHDN3 ADJ 4
VOUT 5
U2AP2112K-1.8TRG1
C8
2.2uF/6.3V
GNDD
VDD_3V3_WIFI VDD_1V8_WIFI
VDD_3V3BJ3
R3 1.5kR4 1.5k
VDD_3V3B
PMIC_PGOODPMIC_nWAKEUPLDO_PGOOD
PMIC_INT
VDD_1V8
NC1B1
NC4C1
NC20D1
NC31E1
NC45F1
NC58G1
NC68H1
NC76 J1
NC84 K1
NC94 L1
NC104 M1
NC111 N1
NC121 P1
NC2B2
NC5C2
NC21D2
NC32E2
NC46F2
NC59G2
NC69H2 NC77 J2
NC85 K2
NC95 L2
NC105 M2
NC112 N2
NC122 P2
NC3B3
NC6C3
NC22D3
NC33E3
NC47F3
NC60G3
NC70H3
NC78 J3
NC86 K3
NC96 L3
NC106 M3
NC113 N3
NC123 P3
NC12C4
NC23D4
NC34E4
NC48F4
NC61G4
NC71H4
NC79 J4
NC87 K4
NC97 L4
NC107 M4
NC114 N4
NC124 P4
NC24D5
NC137 V10
NC136 U11
NC138 V11
IC1D
OSD335x
VDD_3V3B
C1110uF/6.3V
GNDD
R5
10k
GNDD
I2C0_SDA
I2C0_SCLSCL 1
GN
D2
SDA 3
VC
C4
WP5
U4
24LC32AT-I
I2C0_SDAI2C0_SCL
PWR_FLAG
GNDD
C6
10uF/6.3V
SHDN1IN2
GND3
OUT 4
ADJ 5
GND 6
U3TL1963A-33DCQR
VDD_3V3_WIFI
GNDD
C10
10uF/6.3VGNDDGNDD
R2
1k
VDD_3V3B
GNDDGNDD
R1
1M
USB_DC
VDD_5V
SYS_5V
L1
BLM21AG221SN1D
D3
STPS140A
D2
STPS140A
D1
STPS140A
12
3D4
BAT54C
J19VDD_3V3AUX
VDD_3V3A
R85
499
R87
10k
R86DNP
R88
40.2
k
SO
T23
-3R
EF
1C
2A
3U
12
TLV
H43
1
VDD_1V8
R89
499
R91
10k
R90DNP
R92
40.2
k
SO
T23
-3R
EF
1C
2A
3U
13
TLV
H43
1
VDD_3V3B
1
23
Q3MMBT2907
1
23
Q4MMBT2907
12
D7LTST-C191TBKT
R934.75k
GNDD
VDD_3V3AUX
BAT_TEMP W1BATT_VOLT Y1
BAT_1 Y2
BAT_2 Y3
SYS_5V_1 W4
SYS_5V_2 Y4VIN_5V_0Y5
PMIC_POWER_ENC6
VIN_5V_1Y6
VIN_USB_0Y8
VIN_USB_1Y9
PMIC_PGOOD A20
PMIC_LDO_PGOOD B20
PMIC_I2C_SCLC20
PWR_BUTD20
VDD_3V3B_0 U20
VDD_3V3B_1 V20
L3_IN Y20
VDD_3V3AUX Y11
VDDS_DDR Y13
L1_IN Y14
I2C0_SCLC16
VDD_1V8_0 N16
VDD_1V8_1 R16
VDD_MPU Y16
I2C0_SDAC17
L2_IN Y17
PMIC_WAKEUPN A19
PMIC_INTN B19PMIC_I2C_SDAC19
PWR_END19
VDD_CORE Y19
IC1COSD335x

1 2 3 4 5 6
1 2 3 4 5 6
A
B
C
D
A
B
C
D
Date: 2017-06-21KiCad E.D.A. kicad no-vcs-found-05ab44f61ubuntu16.04.1
Rev: 1.00Size: A4Id: 3/6
Title: MateboardFile: usb.schSheet: /USB-UART-WL-BT-GPIO/DPLab@UTN-FRBADirector: Alejandro FurfaroRevisor: Nicolás Dassieu BlanchetAutor: Pablo Ridolfi
USB0_D+USB0_D-
USB0_IDR90RUSB_DC
R100RGNDD
USB1_D+USB1_D-
GN
D1
IN 2
IN 3
EN 4
FLT5OUT6OUT7OUT8
PA
D9
U5TPS2065CDGN
L3
0.1ohm 0805
L2
150ohm 1000mAUSB1_VBUS
R8
10k
GNDD
C13
220uF/6.3V
GNDD
SYS_5V
GNDD
R6
10k
VDD_3V3A
USB1_OCn
USB1_DRVVBUS
tantalum cap
PWR_FLAG
n1OE1
1A2
2Y 3
GN
D4
2A5
1Y 6
2OE7
VC
C8
IC2
SN74LVC2G241DCUR
UART0_TXD.CPU
UART0_RXD.CPU
GNDD
GNDD
VDD_3V3B
C12100nF/6.3V
GNDD
VDD_3V3B
R7
100k
GNDD
UART0_RXDUART0_TXD
UART0_RXD.CPUUART0_TXD.CPU
WL_EN.SIPBT_EN.SIP
WL_SDIO_D2.SIPWL_SDIO_D1.SIPWL_SDIO_CMD.SIP
WL_SDIO_D3.SIP
LS_BUF_OE.SIP
WL_SDIO_CLK.SIPBT_HCI_TX.SIPBT_HCI_RX.SIP
WL_SDIO_D0.SIP
WL_IRQ.SIPBT_HCI_RTS.SIPBT_HCI_CTS.SIP
SYS_BOOT0
R13
100k
R14
100k
R19
100k
R21
100k
R25
100k
R15
100k
R16
100k
R23
100k
R17
100k
R18
100k
R20
100k
R22
100k
R24
100k
R26
100k
R27
100k
R28
100k
VDD_3V3B
GNDD
SYS_BOOT1SYS_BOOT2SYS_BOOT3SYS_BOOT4SYS_BOOT5SYS_BOOT6SYS_BOOT7SYS_BOOT8SYS_BOOT9SYS_BOOT10SYS_BOOT11SYS_BOOT12SYS_BOOT13SYS_BOOT14SYS_BOOT15
R29100
SD
_BO
OT
LCD_PCLKLCD_VSYNCLCD_HSYNCLCD_DE
GPIO3_21SPI1_CLKSPI1_D0SPI1_D1SPI1_CS0
GPIO3_19R11
0R12
0 GPIO0_7
AIN0AIN1AIN2AIN3AIN4AIN5AIN6AIN7
VDD_ADC
GNDA
UART2_TXDUART2_RXD
I2C1_SDAI2C1_SCL
UART1_TXDUART1_RXD
I2C2_SDAI2C2_SCL
SYS_BOOT0SYS_BOOT1SYS_BOOT2SYS_BOOT3SYS_BOOT4SYS_BOOT5SYS_BOOT6SYS_BOOT7SYS_BOOT8SYS_BOOT9SYS_BOOT10SYS_BOOT11SYS_BOOT12SYS_BOOT13SYS_BOOT14SYS_BOOT15
LCD_DATA0LCD_DATA1LCD_DATA2LCD_DATA3LCD_DATA4LCD_DATA5LCD_DATA6LCD_DATA7LCD_DATA8LCD_DATA9LCD_DATA10LCD_DATA11LCD_DATA12LCD_DATA13LCD_DATA14LCD_DATA15
USB1_PWR
LCD_DATA0 R1
LCD_DATA4 T1
LCD_DATA8 U1
LCD_DATA1 R2
LCD_DATA5 T2
LCD_DATA9 U2
LCD_DATA12 V2
LCD_DATA2 R3
LCD_DATA6 T3
LCD_DATA10 U3
LCD_DATA13 V3
VDD_ADC_1A4
LCD_DATA3 R4
LCD_DATA7 T4
LCD_DATA11 U4
LCD_DATA14 V4
VDD_ADC_0A5
LCD_HSYNC R5
LCD_DATA15 T5
LCD_VSYNC U5LCD_PCLK V5
AGND_1A6
AIN0B6
LCD_DE R6
AIN3A7AIN2B7AIN1C7
AIN6A8AIN5B8AIN4C8
AGND_0A9
VREFP_ADCB9
AIN7C9
GPIO3_18 B12
SPI1_CS0 C12SPI1_D1 D12
SPI1_CLK A13
SPI1_D0 B13
GPIO3_19 C13
GPIO3_21 A14
UART1_TXDD15
UART0_RXDE15
USB1_DRVVBUSF15
MII1_RXERR J15
MII1_TXD2 K15
MII1_RXD1 L15
USB0_CEM15
USB0_VBUSP15
I2C1_SCLA16I2C1_SDAB16
UART1_RXDD16
UART0_TXDE16
USB0_DRVVBUSF16
MII1_COL H16
MII1_TXEN J16
MII1_TXD1 K16
MII1_RXD2 L16
MII1_RXD0 M16
USB0_IDP16
UART2_RXDA17
UART2_TXDB17
I2C2_SCLD17
UART0_RSTNE17
MII1_CRS_DV H17
MII1_RXDV J17
MII1_TXD0 K17
MII1_RXD3 L17
MDIO_DATA M17
USB0_DPN17
USB1_IDP17
USB1_DPR17
GPIO0_7 C18
I2C2_SDAD18
UART0_CTSNE18
MII1_REFCLK H18
MII1_TXD3 J18
MII1_TXCLK K18
MII_RXCLK L18
MDIO_CLK M18
USB0_DMN18
USB1_CEP18USB1_DMR18
USB1_VBUST18
IC1B OSD335x

1 2 3 4 5 6
1 2 3 4 5 6
A
B
C
D
A
B
C
D
Date: 2017-06-21KiCad E.D.A. kicad no-vcs-found-05ab44f61ubuntu16.04.1
Rev: 1.00Size: A4Id: 4/6
Title: MateboardFile: cpu_power.schSheet: /CPU Power/DPLab@UTN-FRBADirector: Alejandro FurfaroRevisor: Nicolás Dassieu BlanchetAutor: Pablo Ridolfi
GNDD GNDD
GNDDGNDA
VDD_3V3A
VDD_ADC
R30
10k
1%
GNDD
VDD_1V8
J15VDDS_PLL
J16VDDS_DDR
J17VDD_MPU
J18VDD_CORE
J20VDD_RTCVDD_RTC
DNC
DNC
DNC
VDD_MPU_MONA2
TESTOUT A3
RTC_KALDO_ENN B4
VDDS_DDR1 E5
VDDS_DDR2 F5
VDDS_DDR3 G5
VDDS_DDR4 H5
VDDS_DDR5 J5
VDDS_DDR6 K5
VDDS_DDR7 L5
VPP M5
VDD_3V3A18N5VDD_3V3A17P5
CAP_VDD_RTCD6
VDD_RTC2 E6
VDD_CORE1 F6
VDD_CORE3 G6
VDD_CORE8 K6
VDD_CORE11 L6
VDD_RTC4 N6
VDD_3V3A16P6
VDD_RTC1 D7
VDD_PLL1E7
VDD_CORE2 F7
VDD_CORE4 G7
VDD_CORE12 L7
VDD_3V3A15P7
VDDA_ADCD8
VDD_CORE9 K8
VDD_CORE13 L8
VDD_CORE17 N8
VDD_3V3A14P8
CAP_VDD_SRAM_CORD9
VDD_1V83 E9
VDD_RTC3 F9
VDD_CORE14 L9
VDD_CORE18 N9
VDD_RTC8 P9
CAP_VBB_MPUC10
VDD_1V84 D10
VDD_3V3A22E10
VDD_MPU0F10
VDD_CORE5 G10
VDD_3V3A12P10
VDD_PLL2R10
CAP_VDD_SRAM_MPUD11
VDD_3V3A21E11
VDD_MPU1F11
VDD_CORE6 H11
VDD_CORE15 M11
VDD_3V3A11P11
VDD_PLL3R11
VDD_3V3A20E12
VDD_MPU2F12
VDD_CORE7 J12
VDD_CORE10 K12
VDD_CORE19 N12
VDD_3V3A10P12
VDD_3V3A19E13
VDD_MPU3F13
VDD_MPU4G13
VDD_MPU5H13
VDD_MPU6J13
VDD_RTC6 K13
VDD_CORE16 M13
VDD_CORE20 N13
VDD_3V3A9P13
VDD_RTC7 E14
VDD_3V3A1F14
VDD_3V3A2G14
VDD_3V3A3H14
VDD_3V3A4J14
VDD_3V3A5K14
VDD_3V3A6L14
VDD_RTC5 P14
VDD_PLL4H15
VDD_3V3A7N15
VDD_3V3A8R15
IC1EOSD335x
DGND1A1
DGND59 V1
DGND62 W2DGND63 W3
DGND65 W5
DGND12H6
DGND19J6
DG
ND
38M
6
DGND66 W6
DGND13H7
DGND20J7
DG
ND
27K
7
DG
ND
39M
7
DGND46 N7
DGND67 W7
DG
ND
82Y
7
AG
ND
E8
DGND5F8
DGND7G8
DGND14H8
DGND21J8
DG
ND
40M
8
DGND68 W8
DGND8G9
DGND15H9
DGND22J9
DG
ND
28K
9
DG
ND
41M
9
DGND69 W9
DGND16H10
DGND23J10
DG
ND
29K
10
DG
ND
32L1
0
DG
ND
42M
10
DGND47 N10
DGND70 W10
DG
ND
83Y
10
DGND4E20
DGND26J20
DGND51 N20
DGND53 P20
DGND55 R20
DGND57 T20
DG
ND
80W
20
DGND9G11
DGND24J11
DG
ND
30K
11
DG
ND
33L1
1
DGND48 N11
DG
ND
71W
11
DGND10G12
DGND17H12
DG
ND
34L1
2
DG
ND
43M
12D
GN
D72
W12
DG
ND
84Y
12
DG
ND
35L1
3
DG
ND
73W
13
DG
ND
44M
14
DGND49 N14
DG
ND
74W
14D
GN
D75
W15
DG
ND
85Y
15
DG
ND
76W
16D
GN
D77
W17
DGND2A18
DGND60 V18
DG
ND
78W
18
DG
ND
86Y
18
DGND3E19
DGND6F19
DGND11G19
DGND18H19
DGND25J19
DG
ND
31K
19
DG
ND
36L1
9
DGND45 M19
DGND50 N19
DGND52 P19
DGND54 R19
DGND56 T19
DGND58 U19
DGND61 V19
DG
ND
79W
19
IC1F OSD335x

1 2 3 4 5 6
1 2 3 4 5 6
A
B
C
D
A
B
C
D
Date: 2017-06-21KiCad E.D.A. kicad no-vcs-found-05ab44f61ubuntu16.04.1
Rev: 1.00Size: A4Id: 5/6
Title: MateboardFile: system.schSheet: /System-eMMC-GPIO/DPLab@UTN-FRBADirector: Alejandro FurfaroRevisor: Nicolás Dassieu BlanchetAutor: Pablo Ridolfi
PMIC_nWAKEUP
Y124MHz R
31 1M
C1618pF/50V
C1718pF/50V
PMIC_PGOOD
GN
D3
VC
C5
24U9
74LVC1G07DCK
GNDD
C21
2.2uF/6.3V
R47
10k
VDD_3V3A
GNDD
LDO_PGOOD
SYS_RESETn SYS_RESETn
L5BLM15AG102SN1D
CLKOUT2
Y232.768kHz R
32
DN
P 1
M
C1818pF/50V
C1918pF/50V
JTAG_EMU1JTAG_EMU0JTAG_TDOJTAG_TCKJTAG_TDIJTAG_TMSJTAG_TRSTn
USR0USR1USR2USR3
eHRPWM1AeHRPWM1BeHRPWM2AeHRPWM2B
DAT3B2
VD
DIM
C2
VS
SQ
N2
DAT0A3
DAT4B3
VC
CQ
P3
DAT1A4
DAT5B4
VS
SQ
C4
VC
CQ
M4
VC
CQ
N4
VS
SQ
P4
DAT2A5
DAT6B5
VC
CF
5
VS
SG
5
RSTK5
CMDM5
VS
SN
5
VC
CQ
P5
DAT7B6
VC
CQ
C6
VC
CE
6
CLKM6
VS
SQ
P6
VS
SE
7
VS
SK
8
VC
CK
9
VS
SH
10
VC
CJ1
0
IC3
NAND_4GB
VDD_3V3B
C25
4.7uF/6.3V
GNDD
GNDD
R42
10k
R44
10k
R45
10k
R46
10k
R38
10k
R39
10k
R40
10k
R41
10k
R35
10k
R36
10k
R37
10k
VDD_3V3B
MMC1_DAT0
MMC1_DAT2MMC1_DAT1
MMC1_DAT3MMC1_DAT4MMC1_DAT5MMC1_DAT6MMC1_DAT7MMC1_CMDMMC1_CLKeMMC_RSTn
GN
D3
VC
C5
2 4
U8SN74LVC1G06DCK
R430R
VDD_3V3A
GNDD
C20100nF/6.3V
GNDD
SD.D3SD.D2SD.D1SD.D0SD.CMDSD.CLKSD.CD
TIMER7TIMER6
TIMER4TIMER5
JTAG_EMU1JTAG_EMU0
JTAG_TDOJTAG_TCKJTAG_TDI
JTAG_TMSJTAG_TRSTn
SD.D3SD.D2SD.D1SD.D0
SD.CMDSD.CLK
SD.CD
USR0USR1USR2USR3
VDD_1V8
R330 1%
L4BLM15AG102SN1D
CLKOUT1PMIC_INT
UART4_RXDUART4_TXD
MMC1_DAT0
MMC1_DAT2MMC1_DAT1
MMC1_DAT3MMC1_DAT4MMC1_DAT5MMC1_DAT6MMC1_DAT7MMC1_CMDMMC1_CLK
C28
100nF/6.3V
GNDD
C22
2.2uF/6.3V
GNDD
C26
100nF/6.3V
GNDD
GPIO1_28
GPIO2_1GPIO0_26GPIO0_27GPIO1_12GPIO1_13GPIO1_14GPIO1_15USB1_OCn
GPIO1_16GPIO1_17GPIO1_27
GPIO1_29
R340R
VDD_3V3B VDD_3V3B
C23
2.2uF/6.3V
GNDD
VDD_3V3B
C24
2.2uF/6.3V
GNDD
VDD_3V3B
C27
100nF/6.3V
GNDD
VDD_3V3B
GPIO1_25GPIO2_0
RTC_PORZ B5
EXT_WAKEUP C5
TIMER5 T6
TIMER6 U6
GPIO1_29 V6
TIMER4 R7TIMER7 T7
MMC1_DAT0 U7
MMC1_DAT1 V7
MMC1_DAT2 R8
MMC1_DAT3 T8
MMC1_DAT4 U8
MMC1_DAT5 V8
MMC1_DAT6 R9
MMC1_DAT7 T9
MMC1_CLK U9MMC1_CMD V9
SYS_RESETN A10
JTAG_TRSTNB10
EHRPWM2BT10
EHRPWM2AU10
OSC1_OUTF20
DGND1G20
OSC1_INH20
OSC0_OUTK20
DGND0L20
OSC0_INM20
JTAG_TDOA11
JTAG_TDIB11
JTAG_TMSC11
GPIO0_26 T11
JTAG_TCKA12
GPIO1_13 R12GPIO1_12 T12GPIO0_27 U12
GPIO2_1 V12
GPIO3_20 D13
GPIO1_16 R13
GPIO2_0 T13
GPIO1_15 U13GPIO1_14 V13
JTAG_EMU1B14
JTAG_EMU0C14
CLKOUT2 D14
(EMMC_RSTN)GPIO1_20 R14
EHRPWM1BT14
EHRPWM1AU14
GPIO1_17 V14
CLKOUT1 A15
PORZ B15
MMC0_CDC15
MMC0_DAT1G15
USR2T15USR1U15USR0V15
MMC0_DAT0G16(USB1_OCN)GPIO1_26 T16
(HDMI_INT)GPIO1_25 U16
USR3V16
MMC0_DAT3F17
MMC0_CLK0G17
UART4_RXD T17
UART4_TXD U17
(HDMICLK_DISN)GPIO1_27 V17
EXTIN B18
MMC0_DAT2F18
MMC0_CMDG18
GPIO1_28 U18
IC1AOSD335x

1 2 3 4 5 6
1 2 3 4 5 6
A
B
C
D
A
B
C
D
Date: 2017-06-21KiCad E.D.A. kicad no-vcs-found-05ab44f61ubuntu16.04.1
Rev: 1.00Size: A4Id: 6/6
Title: MateboardFile: wifi.schSheet: /Wi-Fi BLE/DPLab@UTN-FRBADirector: Alejandro FurfaroRevisor: Nicolás Dassieu BlanchetAutor: Pablo Ridolfi
LS_BUF_OE
1.2-3.6V 1.7-5.5V
<
TX
S01
08 /
AD
G33
00 /
MA
X30
02
A11VccA2
A23
A34
A45
A56
A67
A78
A89
^OE10
B1 20
GND 11B8 12B7 13B6 14B5 15B4 16B3 17B2 18
VccB 19
U10
TXS0108VDD_1V8_WIFI
C29100nF/6.3V
GNDD
VDD_3V3_WIFI
C31100nF/6.3V
GNDD
R6033
R6133
R6233
R6333
R6433
R6533
WL_SDIO_D0.CPU
WL_SDIO_D3.CPUWL_SDIO_CLK.CPU
WL_SDIO_D1.CPUWL_SDIO_D2.CPU
WL_SDIO_CMD.CPU
GNDD
LS_BUF_OE.CPUR55
33
R58
1.5k
GNDD
R54
10k
R53
10k
R52
10k
R50
10k
R49
10k
R48
10k
VDD_1V8_WIFI
WL_SDIO_D0WL_SDIO_D1WL_SDIO_D2WL_SDIO_D3WL_SDIO_CLKWL_SDIO_CMD
GND1
GPIO112
GPIO93
GPIO104
GPIO125
WL_SDIO_CMD6
GND7
WL_SDIO_CLK8
GND9
WL_SDIO_D010
GN
D20
GN
D30
WLAN_EN 40
BT
_HC
I_R
TS
50
BT
_AU
D_C
LK60
WL_SDIO_D111
RE
SE
RV
ED
21
GN
D31
BT_EN 41
BT
_HC
I_C
TS
51
GN
D61
WL_SDIO_D212
RE
SE
RV
ED
22
RF
_AN
T1
32
WL_UART_DBG 42
BT
_HC
I_T
X52
RE
SE
RV
ED
62
WL_SDIO_D313
GN
D23
GND 33
BT_UART_DBG 43
BT
_HC
I_R
X53
GN
D63
WLAN_IRQ14
GN
D24
GND 34
GND 44
GN
D54
GN
D64
GND15
GP
IO4
25
GND 35
GND 45
GN
D55
GND16
GP
IO2
26
EXT_32K 36
VBAT_IN 46
BT
_AU
D_I
N56
GND17
GP
IO1
27
GND 37
VBAT_IN 47
BT
_AU
D_O
UT
57
RF
_AN
T2
18
GN
D28
VIO 38
GND 48
BT
_AU
D_F
SY
NC
58
GN
D19
GN
D29
GND 39
GND 49
GN
D59
G1-
G36
PA
D
IC4
WL1835MODGBMOCT
GNDD
R7233
R7733
R7333
R7433
R7533
R7633
R7133WL_SDIO_CMD
WL_SDIO_D0WL_SDIO_D1WL_SDIO_D2WL_SDIO_D3
WL_SDIO_CLK
1.2-3.6V 1.7-5.5V
<
TX
S01
08 /
AD
G33
00 /
MA
X30
02
A11VccA2
A23
A34
A45
A56
A67
A78
A89
^OE10
B1 20
GND 11B8 12B7 13B6 14B5 15B4 16B3 17B2 18
VccB 19
U11
TXS0108VDD_1V8_WIFI
C30100nF/6.3V
VDD_3V3_WIFI
C32100nF/6.3V
GNDD
GNDD GNDD
LS_BUF_OE
BT_HCI_RX
R6733
R6833
R57
150k
GNDD
R56
150k
GNDD
WL_ENBT_ENSLOW_CLKBT_HCI_RTSBT_HCI_TXBT_HCI_CTSWL_IRQ
R6933
R66
DN
P 1
k
GNDD
R59
DN
P 1
k
GNDD
BT_HCI_TX.CPUWL_EN.CPUBT_EN.CPU
CLKOUT2
BT_HCI_RTS.CPU
BT_HCI_CTS.CPUBT_HCI_RX.CPU
WL_IRQ.CPU
WL_IRQ
R70
DN
P 1
0k
VDD_1V8_WIFI
GNDDGNDD
Required to putdevice in debugmode.
C34
10pF
1
2
J4
ANT2GN
DD
C35
10pF
1
2
J12
ANT2GN
DD
C36
10pF
GNDD
J11J10
J8
EN1
GN
D2
OUT 3VD
D4
X1NZ2520SB-32.768KHZ-NSA3534C
VDD_1V8_WIFI
C33100nF/6.3V
GNDD
R78
1k
GNDD
32.768kHz
32.768kHz
R51
DNP 0R32.768kHz
VDD_1V8_WIFIWL_ENBT_EN
J13J14
C38
1uF/6.3V
C40
DNP 47uF
GNDD GNDD
VDD_3V3_WIFI
C37
10uF/6.3V
GNDD
C39
100nF/6.3V
GNDD
R79
33
R80
33
R81
33
R82
33
BT
_HC
I_C
TS
BT
_HC
I_T
X
BT
_HC
I_R
TS
BT
_HC
I_R
X
GNDD
J5 J6J7
J9
G1
S 2D 3
Q1BSS138WL_EN
GNDD
12
D5
LTS
T-C
191T
BK
T
R83
1k
VDD_3V3_WIFI
G1
S 2D 3
Q2BSS138
GNDD
12
D6
LTS
T-C
191T
BK
T
R84
1k
VDD_3V3_WIFI
BT_EN
WL_SDIO_D0.CPUWL_SDIO_D1.CPUWL_SDIO_D2.CPUWL_SDIO_D3.CPUWL_SDIO_CLK.CPUWL_SDIO_CMD.CPU
BT_HCI_TX.CPUWL_EN.CPUBT_EN.CPU
BT_HCI_CTS.CPUBT_HCI_RX.CPUBT_HCI_RTS.CPUWL_IRQ.CPU
LS_BUF_OE.CPU
AE12.4GHz Antenna

37
Apéndice B
Diagrama esquemático de la placabase
A continuación se presenta el diagrama esquemático completo de la placabase junto al subsistema de tiempo real.

1 2 3 4 5 6
1 2 3 4 5 6
A
B
C
D
A
B
C
D
Date: 2017-06-09KiCad E.D.A. kicad no-vcs-found-05ab44f61ubuntu16.04.1
Rev: 1.0Size: A4Id: 1/7
Title: Baseboard MateboardFile: BaseBoard MB-DPLAB.schSheet: /DPLab - UTN.BAFernando Aló / Pablo Ridolfi
Power
Power.sch
Memoria uSD
Memoria.sch
SD_DAT2SD_DAT3/CDSD_CMDSD_CLKSD_DAT0SD_DAT1
ADC_Pulsadores
ADC_Pulsadores.sch
AIN6AIN7
AIN5AIN4
AIN0AIN1AIN2AIN3
SW_ResetSW_PowerSW_Boot_uSDSW_User_Switch
AIN0_3V3AIN1_3V3AIN2_3V3AIN3_3V3
1
MP
1
9774015243R
Mateboard
Mateboard.sch
USB_DEVICE_VBUS
UART0_TXUART0_RX
SD_DAT2SD_DAT3/CD
SD_DAT0SD_DAT1
SD_CMDSD_CLK
AIN0AIN1AIN2AIN3AIN4AIN5AIN6AIN7
USB_DEVICE_ID
SW_Boot_uSDSW_User_Switch
SW_ResetSW_Power
USB_HOST_VBUS
AIN0_3V3AIN1_3V3AIN2_3V3AIN3_3V3
USB_HOST_D-USB_HOST_D+
USB_DEVICE_D-USB_DEVICE_D+
GND GND GND GND
Conectores USB
USB.sch
USB_DEVICE_VBUS
UART0_RXUART0_TX
USB_DEVICE_ID
USB_HOST_VBUS
USB_DEVICE_D-USB_DEVICE_D+
USB_HOST_D-USB_HOST_D+
1
MP5
MH
GND GND GND GND
1
MP6
MH 1
MP7
MH 1
MP8
MH
1
MP
2
9774015243R
1
MP
3
9774015243R
1
MP
4
9774015243R
Real-Time Subsystem
rtss.sch
RESETn
USB_D+USB_D-
USB_VBUS
RST
RST

1 2 3 4 5 6
1 2 3 4 5 6
A
B
C
D
A
B
C
D
Date: 2017-06-09KiCad E.D.A. kicad no-vcs-found-05ab44f61ubuntu16.04.1
Rev: 1.0Size: A4Id: 2/7
Title: Baseboard MateboardFile: Power.schSheet: /Power/DPLab - UTN.BAFernando Aló / Pablo Ridolfi
+24V
GND
GND
GND GND
+5VPWR_FLAG
PWR_FLAG
GND
GND
PWR_FLAG
GND
+5V
GND GND GND
+5V
GND
5V OK
+3V3
GND
3V3 Perifericos OK
+5V
+5V +5VP
+5VD
5V Perifericos (conectores externos)
5V Device(conector a mateboard)
+5VP
+5VD
GND
GND
5V Perifericos OK
5V Device OK
GND
+3.3VP
3V3 OKTP13V3_PadTP2GND_Pad GND
TP33V3Per_PadTP4GND_Pad GND
TP55V_PadTP6GND_Pad GND
TP75VPer_PadTP8GND_Pad GND
TP95VDev_PadTP10GND_Pad GND
+3V3 +3.3VP 3V3 Perifericos(conectores externos)
Fuente 12-24VDC a [email protected]
LDO 3V3
Protecciónes PolyswitchStatus LEDs
R1 82R 5%
R2 82R 5%
R3 150R 5%
R4 150R 5%
R5 150R 5%
D5Green Clear
D4Green Clear
D3Green Clear
D2Green Clear
D1Green Clear
R656k 1%
R7 2k21 1%
R81k1 1%
R9150R 1%
C4
0.01uF 35V X7R
C3
0.1uF 35V X7R
C2
1uF 35V X7R
+
C1
100uF 35v Elect
C7
180nF 16V X7R 10%
C5220pF 50V NP0 5%
+ C9100uF 10v Tant
C60.1uF 35V X7R
C810uF 10V X5R
D7
Schottky 40V 3A Rapido
L1
15UH 3.5A
D6200V 2A
F1
PTC 1.10A 33V
F3
PTC 1A 6V
F2
PTC 0.5A 6V
F4
PTC 0.5A 6V
1
23
J3Conector_Barrel
GN
D1
VO 2VI3
VO 4
U2LD1117 +3V3
OUT 1
SYNCH 2EN3
CO
MP
4
FB 5FSW6
GN
D7
VCC8
GN
D9
U1L7986
1 2L14
F.B. 220R@100MHz
1 2L13
F.B. 220R@100MHz
D21
TVS 24V SMA 400W
VinSW
FB
3V3
3V3_Per
5V
5V_Per
5V_Dev

1 2 3 4 5 6
1 2 3 4 5 6
A
B
C
D
A
B
C
D
Date: 2017-06-09KiCad E.D.A. kicad no-vcs-found-05ab44f61ubuntu16.04.1
Rev: 1.0Size: A4Id: 3/7
Title: Baseboard MateboardFile: Memoria.schSheet: /Memoria uSD/DPLab - UTN.BAFernando Aló / Pablo Ridolfi
+3V3
+3V3
GND
GND
SD_DAT2SD_DAT3/CD
SD_CMD
SD_CLK
SD_DAT0SD_DAT1
GND
R12
10K
5%
R13
10K
5%
R14
10K
5%
R15
10K
5%
R16
10K
5%
R17
10K
5%
C19
10uF 10V X5R
C20
0.1UF 6.3V X7R
Memoria uSD
DAT21
DAT3/CD2
CMD3
VDD4
CLK5
VSS6
DAT07
DAT18
SHIELD 9
J5 Molex uSD_Card 0475710001

1 2 3 4 5 6
1 2 3 4 5 6
A
B
C
D
A
B
C
D
Date: 2017-06-09KiCad E.D.A. kicad no-vcs-found-05ab44f61ubuntu16.04.1
Rev: 1.0Size: A4Id: 4/7
Title: Baseboard MateboardFile: ADC_Pulsadores.schSheet: /ADC_Pulsadores/DPLab - UTN.BAFernando Aló / Pablo Ridolfi
GND
R30
10K
5%
C212.2uF 6.3V X5R
C220.1UF 6.3V X7R
GND
+3V3
SW_Reset
GND
SW_Power
GND
R32
100K
5%
+3V3
SW_Boot_uSD
R33100R 5%
GND
R34
100K
5%
+3V3
SW_User_Switch
R31100K 5%
C270.1UF 6.3V X7R
GND
Pulsadores
R2236K 1%
R2343.2K 1%
R281K 1%
D11Zener 2V
AIN0
AIN0_3V3
GNDA
C25
0.1UF 6.3V X7R
R2436K 1%
R2543.2K 1%
R291K 1%
D12Zener 2V
AIN1
AIN1_3V3
GNDA
C26
0.1UF 6.3V X7R
R1836K 1%
R1943.2K 1%
R261K 1%
D9Zener 2V
AIN2
AIN2_3V3
GNDA
C23
0.1UF 6.3V X7R
R2036K 1%
R2143.2K 1%
R271K 1%
D10Zener 2V
AIN3
AIN3_3V3
GNDA
C24
0.1UF 6.3V X7R
R3936K 1%
R4043.2K 1%
R451K 1%
D15Zener 2V
AIN4
AIN4_3V3
GNDA
C30
0.1UF 6.3V X7R
R4136K 1%
R4243.2K 1%
R461K 1%
D16Zener 2V
AIN5
AIN5_3V3
GNDA
C31
0.1UF 6.3V X7R
R3536K 1%
R3643.2K 1%
R431K 1%
D13Zener 2V
AIN6
AIN6_3V3
GNDA
C28
0.1UF 6.3V X7R
R3736K 1%
R3843.2K 1%
R441K 1%
D14Zener 2V
AIN7
AIN7_3V3
GNDA
C29
0.1UF 6.3V X7R
Adaptaciones ADC
AIN6
AIN7
AIN5
AIN4AIN0
AIN1
AIN2
AIN3
AIN0_3V3
AIN1_3V3
AIN2_3V3
AIN3_3V3
GNDA
+3.3VA
GNDA
+3.3VA
GNDA
+3.3VA
GNDA
+3.3VA
+3.3VA
1 2L11 F.B. 220R@100MHz
GND
1 2L12 F.B. 220R@100MHz
GNDA
123
4S1
Switch_Tactile
123
4S2
RESET
123
4S4
Boot_uSD
123
4S3
User
123
J8
AD
C04
+3.3VP
123
J9
AD
C05
123
J6
AD
C06
123
J7
AD
C07

1 2 3 4 5 6
1 2 3 4 5 6
A
B
C
D
A
B
C
D
Date: 2017-06-09KiCad E.D.A. kicad no-vcs-found-05ab44f61ubuntu16.04.1
Rev: 1.0Size: A4Id: 5/7
Title: Baseboard MateboardFile: Mateboard.schSheet: /Mateboard/DPLab - UTN.BAFernando Aló / Pablo Ridolfi
JTAG_TMSJTAG_TDI
JTAG_TDOJTAG_TCK
JTAG_EMU0SYS_RESETnXDMA_EVENT_INTROSD.CD
+3V3
GND
GND
+3V3
CLKOUT2
JTAG_EMU1
JTAG_TRSTn
+3V3
GND
USB_HOST_D-USB_HOST_D+
USB_DEVICE_D-USB_DEVICE_D+
USB_DEVICE_VBUS
UART0_TXUART0_RX
JTAG
SD_DAT2SD_DAT3/CD
SD_CMDSD_CLK
SD_DAT0SD_DAT1
R48
4.75K 1%
R49 4.75K 1%
R47
4.75
K 1
%
1 23 45 67 89 10
20
30
40
50
60
70
11
21
31
41
51
61
12
22
32
42
52
62
13
23
33
43
53
63
14
24
34
44
54
64
15
25
35
45
55
65
16
26
36
46
56
66
17
27
37
47
57
67
18
28
38
48
58
68
19
29
39
49
59
69
J2
DF
40C
-70D
S
1 23 45 67 89 10
20
30
40
50
60
70
11
21
31
41
51
61
12
22
32
42
52
62
13
23
33
43
53
63
14
24
34
44
54
64
15
25
35
45
55
65
16
26
36
46
56
66
17
27
37
47
57
67
18
28
38
48
58
68
19
29
39
49
59
69
J1
DF
40C
-70D
S
USB0_DMUSB0_DPUSB0_ID
UART0_RXDUART0_TXD
UART1_RXDUART1_TXD
UART2_RXDUART2_TXD
SD_BOOT
SD.D3SD.D2SD.D1SD.D0
SD.CMDSD.CLKSD.CD
USR0USR1USR2USR3
UART4_RXDUART4_TXD
GPIO1_25GPIO1_28
GPIO1_17GND
GND
GND PWR_BUTSYS_RESETn
CLKOUT2CLKOUT1
JTAG_EMU1JTAG_EMU0
JTAG_TDOJTAG_TCKJTAG_TDI
JTAG_TMSJTAG_TRSTn
GPIO1_13
I2C0_SDAI2C0_SCL
I2C2_SCLI2C2_SDA
I2C1_SDAI2C1_SCL
SPI1_CLKSPI1_MISOSPI1_MOSI
SPI1_CS0
GPIO0_7GPIO3_21GPIO3_19GPIO1_27
GND
GND
GND
GND
GND
GND
GND
GND
GND
VBAT
VBAT_SENSEVBAT_TEMP
USB1_DMUSB1_DP
USB1_VBUS
GPIO2_0
GPIO1_29
GPIO1_16
GPIO1_15GPIO1_14GPIO0_26
AIN0
AIN1
AIN2
AIN3
AIN4
AIN5
AIN6
AIN7
GNDAGPIO1_12GPIO0_27
GPIO2_1
TIMER6TIMER5
TIMER4TIMER7
eHRPWM2B
eHRPWM2A
eHRPWM1B
eHRPWM1A
LCD_DELCD_PCLK
LCD_VSYNCLCD_HSYNCLCD_DATA0LCD_DATA1LCD_DATA2LCD_DATA3LCD_DATA4LCD_DATA5LCD_DATA6LCD_DATA7LCD_DATA8LCD_DATA9
LCD_DATA10LCD_DATA11LCD_DATA12LCD_DATA13LCD_DATA14LCD_DATA15
GND
GNDGND
GND
GND
+5VD +5VD
12
D17 Green ClearR50 1.3K 5%
12
D18 Green ClearR51 1.3K 5%
12
D19 Green ClearR52 1.3K 5%
12
D20 Green ClearR53 1.3K 5%
GND
USR0
USR1
USR2
USR3
AIN0
AIN1
AIN2
AIN3
AIN4
AIN5
AIN6
AIN7
GN
D
+5VP+3.3VP
SW_Boot_uSD
SW_User_Switch
SW_ResetSW_Power
USB_DEVICE_ID
SPI1_CLKSPI1_MISOSPI1_MOSISPI1_CS0
USB_HOST_VBUS
+3.3VP
AIN0_3V3AIN1_3V3AIN2_3V3AIN3_3V3
UART1_TXDUART1_RXDGPIO1_17GPIO1_25GPIO1_28GPIO1_13GPIO0_7GPIO3_21
GPIO3_19GPIO1_27
+3.3VP
+5VP
GND
I2C1_SCLI2C1_SDA
I2C2_SCLI2C2_SDA
+3.3VP
GNDGND
I2C1_SDAI2C1_SCL
UART4_TXDUART4_RXD
SPI1_CLK
SPI1_MISOSPI1_MOSIGPIO1_12GPIO0_27
GPIO2_1
SPI1_MISOSPI1_MOSI
SPI1_CLK
GPIO2_0
GPIO1_15GPIO1_14GPIO0_26
UART2_TXDUART2_RXD
TIMER6TIMER5
eHRPWM2AeHRPWM1AeHRPWM2B
TIMER7
TIMER4
LCD_DE LCD_PCLKLCD_VSYNC LCD_HSYNCLCD_DATA0 LCD_DATA1LCD_DATA2 LCD_DATA3LCD_DATA4 LCD_DATA5LCD_DATA6 LCD_DATA7LCD_DATA8 LCD_DATA9LCD_DATA10 LCD_DATA11LCD_DATA12 LCD_DATA13LCD_DATA14 LCD_DATA15
GND
GND
+5VP
+3.3VP
GND
TP16SYS_5V_Pad
TP15GND_Pad GND
TP12I2C0_SCL_PadTP13I2C0_SDA_Pad
TP11GND_PadI2C0_SCLI2C0_SDA
GND
SYS_5V
SYS_3V3
TP14SYS_3V3_Pad SYS_3V3
SYS_5V
TP17GND_Pad GND
VBATVBAT_SENSE
VBAT_TEMP
VDD_ADC_IN
TP18VDD_ADC_IN_Pad VDD_ADC_IN
TP19GND_Pad GND
GPIO1_29
User Leds
Arduino Shield
Raspberry Pi 3 Hat
MateboardLCD & Battery
Test Points
AIN0_3V3AIN1_3V3AIN2_3V3AIN3_3V3
C330.1uF X7R 50VC32
0.1uF X7R 50V
1 23 45 67 89 10
20
30
40
11
21
31
12
22
32
13
23
33
14
24
34
15
25
35
16
26
36
17
27
37
18
28
38
19
29
39
J12
Ras
pber
ry P
i
1 23 45 67 89 10
20
11
21
12
22
13
23
14
24
15 1617 1819
J10
Hea
der
Vid
eo
1 23 45 67 89 10
20
11 1213 1415 1617 1819
J11
Con
ecto
r_02
X10
12345678
J14
AR
D_P
ower
12345678910
J16
AD
R_D
igita
l2
123456
J15
AR
D_A
nalo
g
1234
J13Hea
der_
Bat
tery
12345678
J17
AD
R_D
igita
l1
GND
C35
0.1UF 6.3V X7R
C34
10uF 10V X5R
+5VD
GND

1 2 3 4 5 6
1 2 3 4 5 6
A
B
C
D
A
B
C
D
Date: 2017-06-09KiCad E.D.A. kicad no-vcs-found-05ab44f61ubuntu16.04.1
Rev: 1.0Size: A4Id: 6/7
Title: Baseboard MateboardFile: USB.schSheet: /Conectores USB/DPLab - UTN.BAFernando Aló / Pablo Ridolfi
GND
+5V
USB_DEVICE_D-USB_DEVICE_D+
GND
GND GND
GND GND
VCC_UART
VCC_UART
GND
UART0_RXUART0_TX
USB_DEVICE_D-USB_DEVICE_D+
USB_DEVICE_VBUS
UART0_RXUART0_TX
GND
USB_HOST_D-USB_HOST_D+
USB_HOST_D-USB_HOST_D+
GND
R10 27R 5%R11 27R 5%
C13
0.1UF 6.3V X7R
C12
10uF 10V X5R
C11
0.1UF 6.3V X7R
C10
10uF 10V X5R
C18
0.1UF 6.3V X7R
GND
C15
10uF 10V X5R
1 234
L8C.M. Choke
1 234
L10C.M. Choke
1 2
L6F.B. 220R@100MHz
1 2L7
F.B. 220R@100MHz
1 2L2
F.B. 220R@100MHz
1 2L4
F.B. 220R@100MHz
1 2L3
F.B. 220R@100MHz
1 2L5
F.B. 220R@100MHz
USB_DEVICE_ID USB_DEVICE_ID
C14
47pF 50V C0G
C16
47pF 50V C0G
USB_HOST_VBUSUSB_HOST_VBUS
USB_DEVICE_VBUS
USB Device
USB Host
USB Bridge to UART0
D8
Schottky 20V 1A 340mV
PWR_FLAG
VBUS 1
DM 2
DP 3
ID 4
GND 5
SHIELD 6
SHIELD 7
SHIELD 8
SHIELD 9
J18USB-Device
TXD 1
RTS 2
VCCIO3
RXD 4
GN
D5
CTS 6
CBUS2 7
USBDP8USBDM9
3V3OUT10
RESET11
VCC12
GN
D13
CBUS1 14CBUS0 15
CBUS3 16
U4 FT230XS_U
VBUS 1
DM 2
DP 3
ID 4
GND 5
SHIELD 6
SHIELD 7
SHIELD 8
SHIELD 9
J4USB
GND
GN
D
IO2
IO3
IO4
VB
US
IO1
1
23 45 6
U3
DVIULC6-4SC6
GND
GN
D
IO2
IO3
IO4
VB
US
IO1
1
23 45 6
U5
DVIULC6-4SC6
GND
R540R
USB_HOST_ID
GND
GN
D
IO2
IO3
IO4
VB
US
IO1
1
23 45 6
U6
DVIULC6-4SC6
VBUS 1
DM 2
DP 3
ID 4
GND 5
SHIELD 6
SHIELD 7
SHIELD 8
SHIELD 9
J19USB-Host
1 234
L9C.M. Choke
GND
R550R
USB_HOST_VBUS
C17
0.1UF 6.3V X7R
USB_DEVICE_VBUS

1 2 3 4 5 6
1 2 3 4 5 6
A
B
C
D
A
B
C
D
Date: KiCad E.D.A. kicad no-vcs-found-05ab44f61ubuntu16.04.1
Rev: 1.0Size: A4Id: 7/7
Title: Baseboard MateboardFile: rtss.schSheet: /Real-Time Subsystem/DPLab - UTN.BAPablo Ridolfi / Fernando Aló
P0_23/FC1_RTS_SCL_SSELN1//CT0CAP0/UTICK_CAP11
P0_24/FC1_CTS_SDA_SSELN0//CT0CAP1/CT0MAT02
P0_25/FC4_RTS_SCL_SSELN1/FC6_CTS_SDA_SSELN0/CT0CAP2/CT1CP13
P0_26/FC4_CTS_SDA_SSELN0//CT0CAP34
USB_DP 5
USB_DM 6
P1_16/PDM0_DATA/CT0MAT0/CT0CAP0/FC7_RTS_SCLX_SSELN1 7
VDD_0 8
VSS_0 9
P1_17////MCLK/UTICK_CAP3 10
VSSA 20
P1_10//FC6_TXD_SCL_MISO/SCT0_OUT4/FC1_SCK///USB0_FRAME 30
P0_6/FC6_TXD_SCL_MISO//CT0MAT1/UTICK_CAP040
P0_15/FC3_RTS_SCL_SSELN1/SWO/CT2MAT2/FC4_SCK//SPIFI_IO250
P0_20/FC5_RXD_SDA_MOSI/FC0_SCK/CT3CAP060
P0_29/FC1_RXD_SDA_MOSI/SCT0_OUT2/CT0MAT3/CT0CAP1//CT0MAT111
VREFN 21
P0_0/FC0_RXD_SDA_/FC3_CTS_SDA_SSELN0/CT0CAP0/SCT0_OUT331
P0_7/FC6_SCK/SCT0_OUT0/CT0MAT2/CT0CAP241
P1_12//FC5_RXD_SDA_MOSI/CT1MAT0/FC7_SCK/UTICK_CAP2 51
P0_21/CLKOUT/FC0_TXD_SCL_MISO/CT3MAT0///SPIFI_CLK61
P0_30/FC1_TXD_SCL_MISO/SCT0_OUT3/CT0MAT2/CT0CAP212
VREFP 22
P0_1/FC0_TXD_SCL_MISO/FC3_RTS_SCL_SSELN1/CT0CAP1/SCT0_OUT132
P1_11//FC6_RTS_SCL_SSELN1/CT1CAP0/FC4_SCK///USB0_VBUS 42
P0_16/FC3_SSELN2/FC6_CTS_SDA_SSELN0/CT3MAT1/SWCLK//SPIFI_152P1_15/PDM0_CLK/SCT0_OUT5/CT1CAP3/FC7_CTS_SDAX_SSELN0 62
P0_31/PDM0_CLK/FC2_CTS_SDA_SSELN0/CT2CAP2/CT0CAP3/CT0MAT313VDDA 23
RTCXIN33
P0_8/FC2_RXD_SDA_MOSI/SCT0_OUT1/CT0MAT343
P0_17/FC3_SSELN3/FC6_RTS_SCL_SSELN1/CT3MAT2/SWDIO//SPIFI_053
P0_22/CLKIN/FC0_RXD_SDA_MOSI/CT3MAT363
P1_0/PDM0_DATA/FC2_RTS_SCL_SSELN1/CT3MAT1//CT0CAP0 14
VDD_1 24
VDD_2 34
P0_9/FC2_TXD_SCL_MISO/SCT0_OUT2/CT3CAP0/FC3_CTS_SDA_SSELN044
P1_13//FC5_TXD_SCL_MISO/CT1MAT1/FC7_RXD_SDA_MOSI 54
RESETn64
P1_1//SWO/SCT0_OUT4/FC5_SSELN2/FC4_TXD_SCL_MISO 15
VSS_1 25
RTCXOUT35
P0_10/FC2_SCK/SCT0_OUT3/CT3MAT045
VSS_2 55
P1_2/MCLK/FC7_SSELN3/SCT0_OUT5/FC5_SSELN3/FC4_RXD_SDA_MOSI 16
P1_6//FC7_SCK/CT1CAP2//CT1MAT2/PVT_RED0_ALERT/USB0_VBUS 26
P0_2/FC0_CTS_SDA_SSELN0/FC2_SSELN3/CT2CAP136
P0_11/FC3_SCK/FC6_RXD_SDA_MOSI/CT2MAT146
VDD_3 56
P1_3//FC7_SSELN2/SCT0_OUT6//FC3_SCK/CT0CAP1/USB0_LEDN 17
P1_7//FC7_RXD_SDA_MOSI/CT1MAT2//CT1CAP2/PVT_AMBER1_ALERT 27
P0_3/FC0_RTS_SCL_SSELN1/FC2_SSELN2/CT1MAT337
P0_12/FC3_RXD_SDA_MOSI/FC6_TXD_SCL_MISO/CT2MAT347
P1_14//FC2_RXD_SDA_MOSI/SCT0_OUT7/FC7_TXD_SCL_MISO 57
P1_4/PDM1_CLK/FC7_RTS_SCL_SSELN1/SCT0_OUT7//FC3_TXD_SCL_MISO/ 18
P1_8//FC7_TXD_SCL_MISO/CT1MAT3//CT1CAP3/PVT_RED1_ALERT 28
P0_4/FC0_SCK/FC3_SSELN2/CT0CAP238
P0_13/FC3_TXD_SCL_MISO/SCT0_OUT4/CT2MAT048
P0_18/FC5_TXD_SCL_MISO/SCT0_OUT0/CT0MAT058
P1_5/PDM1_DATA/FC7_CTS_SDA_SSELN0/CT1CAP0//CT1MAT3/PVT_AM0_ALRT/ 19
P1_9//FC3_RXD_SDA_MOSI/CT0CAP2///USB0_LEDN/USB0_CONNECTN 29
P0_5/FC6_RXD_SDA_MOSI/SCT0_OUT6/CT0MAT039
P0_14/FC3_CTS_SDA_SSELN0/SCT0_OUT5/CT2MAT1/FC1_SCK//SPIFI_49
P0_19/FC5_SCK/SCT0_OUT1/CT0MAT1///SPIFI_CSN59
U7LPC54114J256BD64
Housings_QFP:LQFP-64_10x10mm_Pitch0.5mm
R56
100K
5%
+3V3
GNDGNDA
RESETn
USB_D+USB_D-
C380.1UF 6.3V X7R
GND
C410.1UF 6.3V X7R
GND
C390.1UF 6.3V X7R
GND
C420.1UF 6.3V X7R
GND
+3V3
C400.1UF 6.3V X7R
GND
C430.1UF 6.3V X7R
GND
Y132.768kHz
USB_VBUS
C3618pF 6.3V X7R
C3718pF 6.3V X7R
GND
R584.75K 1%
R574.75K 1%
+3V3 +3V3
B
G
R1
2
3
4
D22LED_RABG
+3V3
R59 1k1 1%
R60 1k1 1%
R61 1k1 1%
P0_29
P1_10
P1_9
P0_29
P1_10P1_9
1234
J20RTSS_I2C
+3V3
GND
+3.3VA

45
Bibliografía
[1] Vitaly Wool. Spreading the disease: Linux on microcontrollers. 2014. URL: http://events.linuxfoundation.org/sites/events/files/slides/spreading.pdf.
[2] Gerald Coley. BeagleBone Black System Reference Manual. 2013, pág. 3. URL:https://cdn-shop.adafruit.com/datasheets/BBB_SRM.pdf.
[3] Proyecto CIAA. Computadora Industrial Abierta Argentina. 2014. URL:http://www.proyecto-ciaa.com.ar.
[4] Proyecto CIAA. CIAA-ACC. 2017. URL: http://www.proyecto-ciaa.com.ar/devwiki/doku.php?id=desarrollo:ciaa_acc:ciaa_acc_inicio.
[5] Proyecto CIAA. Linux en la CIAA-NXP. 2016. URL: http://www.proyecto-ciaa.com.ar/devwiki/doku.php?id=desarrollo:linux.
[6] Proyecto CIAA. Estudio aproximado de costos de la CIAA-ACC. 2015. URL:http://www.proyecto-ciaa.com.ar/devwiki/doku.php?id=desarrollo:ciaa_acc:estudio_aproximado_de_costos.
[7] Texas Instruments. AM3358 Sitara Processor. URL:http://www.ti.com/product/AM3358.
[8] BeagleBoard. BeagleBone Black Wireless. URL:https://beagleboard.org/black-wireless.
[9] Octavo Systems. OSD335x System-in-Package. URL:https://octavosystems.com/octavo_products/osd335x/.
[10] Texas Instruments. WL1835MOD Wi-Fi and Bluetooth module. URL:http://www.ti.com/product/WL1835MOD.
[11] Texas Instruments. AM335x Hardware Design Guide. URL: http://processors.wiki.ti.com/index.php/AM335x_Hardware_Design_Guide.
[12] Octavo Systems. OSD335x Reference Design Tutorial Series. URL:https://octavosystems.com/app_notes/osd335x-design-tutorial/.
[13] Henry Ott. PCB Stack-up for 6-layer boards. URL:http://www.hottconsultants.com/techtips/pcb-stack-up-3.html.
[14] KiCost. Build cost spreadsheet for KiCad projects. URL:https://xesscorp.github.io/KiCost/docs/_build/singlehtml/index.html.
[15] PCB Cart. PCB Cart Online Quotation. URL:https://www.pcbcart.com/quote.
[16] Pablo Ridolfi. Repositorio de hardware del módulo de cómputo. URL:https://gitlab.frba.utn.edu.ar/pridolfi/mateboard/tree/osd335x.
[17] Jean-Pierre Charras, Dick Hollenbeck y Wayne Stambaugh. KiCad: A CrossPlatform and Open Source Electronics Design Automation Suite. URL:http://kicad-pcb.org/.
[18] Texas Instruments. Programmable Real-Time Unit Subsystem and IndustrialCommunication Subsystem. URL:http://processors.wiki.ti.com/index.php/PRU-ICSS.
[19] Fernando Aló y Pablo Ridolfi. Repositorio de hardware de la placa base. URL:https://gitlab.frba.utn.edu.ar/dplab/Baseboard-Mateboard.
BIBLIOGRAFÍA 46
[20] Keil. CDC (ACM): Communication Device Class (Abstract Control Model).URL: https://www.keil.com/pack/doc/mw/USB/html/group__usbh__cdcacm_functions.html.
[21] Atmel. STK500 Communication Protocol. URL:http://www.atmel.com/images/doc2591.pdf.
[22] Modbus Organization. MODBUS over Serial Line Specification &Implementation guide. URL:http://www.modbus.org/docs/Modbus_over_serial_line_V1.pdf.
[23] Pablo Ridolfi. Repositorio de hardware de la biblioteca RemoteMCU. URL:https://gitlab.frba.utn.edu.ar/pridolfi/remotemcu.
[24] Proyecto CIAA. picoCIAA. URL:http://www.proyecto-ciaa.com.ar/index_comprar_picociaa.html.
[25] Pablo Ridolfi. Firmware CMSIS-DAP con interfaz CDC. URL:https://github.com/pridolfi/cmsis_dap_cdc.
[26] Facundo Larosa y Pablo Ridolfi. Heurística para el Diseño de CircuitosImpresos. 2017. URL: https://gitlab.com/pridolfi/heuristica-pcb/uploads/fb2684330904557154b8712b4da65d96/heuristica.pdf.
[27] IPC the Association Connecting Electronics Industries. IPC-2221A GenericStandard on Printed Board Design. 2017. URL:http://www.ipc.org/TOC/IPC-2221A.pdf.
[28] GNU Free Software Foundation. GNU Octave Scientific ProgrammingLanguage. URL: https://www.gnu.org/software/octave.
[29] Octavo Systems. OSD335x-SM System-in-Package. 2017. URL:https://octavosystems.com/octavo_products/osd335x-sm/.


















