Modularity for a Robotic Locomotion System Kenneth Chin and Prang Chim January 26, 2001 Advisor: Dr....
25
Modularity for a Robotic Locomotion System Kenneth Chin and Prang Chim January 26, 2001 Advisor: Dr. Jim Ostrowski
-
Upload
alyson-campbell -
Category
Documents
-
view
214 -
download
0
Transcript of Modularity for a Robotic Locomotion System Kenneth Chin and Prang Chim January 26, 2001 Advisor: Dr....

Modularity for a Robotic Locomotion System
Kenneth Chin and Prang Chim
January 26, 2001
Advisor: Dr. Jim Ostrowski

Case Study Approach
Early Stages
System & Design Analysis
Future Perspective
An exploration into the overall goal of our project where modularity is defined providing an overview into the mechanical structures and communication architecture.
A detailed examination of the mechanical, electrical, and communication components of the electro-mechanical system.
A hindsight perspective of problems encountered while elaborating on improvements for the process while providing an outlook upon the project’s future.

The Early StagesOverall Goal
Modularity?
Architecture Overview
What is the point of this project?
What is modularity?.
An overview of the system architecture from a high level in order to understand the integration with lower level components.

Overall Goal Investigation of modularity Design of a component to act as a universal
interface between the base unit and components Improved wheel modular unit and base
Implementation of an efficient bus system with expansion capabilities with hardware

What is Modularity? Modular/ Modularity (adjective)
“Designed with standardized units or dimensions, as for easy assembly and repair or flexible arrangement and use.”
Application to Robotics Easily attachable and detachable modules Each module contains the necessary mechanical
and electrical components (I.e. motors, microprocessors, etc.)

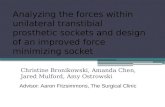
Architecture Overview
Master Processor
SlaveProcessor
SlaveProcessor
SlaveProcessor
SlaveProcessor
FTChip
Servo Motor 1
Servo Motor 2
•Consists of single master processor where all program instructions originate.
•Independent slave processor allow for device independent calibrations.
•Instructions passed from master->slave->FT639 (drives servo motors directly)
Exploded View

System and Design Analysis
MechanicalDesign
ElectricalSystem
CommunicationControls
An exploration of the mechanical design of: body, universal insert module, and servo motor housing.
An exploration of PCB design, master module, and the slave module.
An explanation of the communication of the overall integration system.

Design CriteriaDimension Explanation
Size• Small and compact to keep weight to a minimal
Weight
• Lightweight allows for decreased torque requirements on motors while allowing for increased mobility
Functionality
• Ability to be functional pliable and adaptable• Possibility to incorporate sensors• Mobility in terms of a wheel and with legs

Body DesignDesign 2Design 1
Components• made entirely of plexiglass• each side is one single piece
Problems• heavy• a lot of manufacturing
Components• made entirely of plexiglass• sides are individual pieces
Problems• slightly lighter• many parts

Body Design
Components
• 2 sheets of 6x10x0.25” plexiglass – Manufactured using CNC machine
• 12 Aluminum threaded Round Standoffs: ¼” OD, 1-1/2” length
Advantages
• Light weight
• less manufacturing (standoffs are off the shelf products
• a total of 8 slots for modules
Final Design

Universal Insert Module
Initial Design: Two part component

Universal Insert Module
Final Conception
• One piece component made of ABS material. • Easily manufactured with the use of the FDM machine.

Servo Motor Housing
Problem• Resulting moments on servo horns• Deformation of servo horns
Original Design

Servo Motor Housing
Lower Servo Unit (Driving) Upper Servo Unit (Steering)
Solution• Redirect moment onto a shaft made of stronger material• shafts connected to servo motors with use of gears and chains
6-32 set screws• connects to insert module
Steering Shaft
Steering Shaft connectionDriving Shaft
Ball Bearing slot
6-32 set screws• set steering shaft to lower unit

Assembled Module
Insert Module• made of ABS• manufactured using FDM machine
Upper servo unit• made of ABS 1.25x3x1’’• manufactured using CNC machine
Lower servo unit• made of ABS 1.25x3x1’’• manufactured using CNC machine
Shafts• Drill Rods• Shafts from toy car
Servo Motors
Wheel• taken from toy car
Spacers• 4 pieces• ¼” OD, 1/8” lenght

Final AssemblyComplete assembly of robot with four wheel modules inserted into the body

Master Module
BasicStamp IIMicro-
controller
Dedicated Bus System
for SEND
Dedicated Bus System for RECEIVE
•2 individual bus systems for sending and receiving data to avoid data collisions
•Primary Program sequence contained within
Inputs Outputs
Power Source: provides power to the micro-controller and also to the slave modules for their respective micro-controllers.
Data Line Out: Utilizes a serial line sending data and individual instructions to each slave module component (i.e. such as speed, position) containing a micro-controller
Data Line In: consists of a single serial line coming from each individual slave module carrying valuable data instructions from each slave (i.e. may include speed, position, error, and feedback information)

Slave Module Schematic
•Each slave module unit is independent unit containing: FT639 servo controller chip, 1 Basic Stamp II microcontroller
•2 dedicated 5V lines (servo motors & chips)
•180 degree and 360 degree servo motor on board
Courtesy of Kapil and Darnel
•Each slave module unit is independent unit containing: FT639 servo controller chip, 1 Basic Stamp II microcontroller
•2 dedicated 5V lines (servo motors & chips)
Pin 0
Pin 14
Pin 15
Microcontroller Pin Assignments
Dedicated SEND line to master
Dedicated RECEIVE line to master
Dedicated COM to FT639 chip

PCB Circuit Board•Generated circuit board to be inserted into each module unit to allow for processing on the slave as opposed to master
•Generated custom-designed PCB schematic sending NC and drill files for production
•2 layers: Top layer (red) and Bottom layer (blue)
Servo Power
RCVLine
System GroundSND
Line
Future Expansion Future
Expansion
System Power
•3 dedicated channels for power and ground
•2 dedicated I/O channels for communication with the master
•2 dedicated channels for future expansion (hardware id sequence)

Communication Controls
Master Module
Unit
Slave Module Unit
(Addressed at $FF)
($FD)……..
($FF)……..
•Addressing ($FC, $FD, $FE, $FF)
•Allows for routing of information from master to appropriate slave unit
•Sends data serially at 2400 baud
•Allows handshaking while slave constantly pings for incoming data
Address
Position
Servo Address
Completion
•Checks to see which modules are plugged in routing data and adjusting program accordingly
•Flow Sequence
•Master -> Slave > FT chip -> Slave -> Master

Future PerspectiveResults &Review
Continuation
Credits
What were the results of our projects? What problems did we encounter through the project?
Who we would like to thank for making this project a success.
An insight into the next generation model.

Problems Encountered
Problem: Inability to align parts consistently on the CNC machine.
Result: Not using the bearings for the wheel shaft
Manufacturing
Problem: Inability to produce high quality and tolerant parts through fusion deposition modeling (FDM). .
Result: Loss tolerances upon inserting screws with high accuracy.
Problem: Gear Specifications and slippage
Result: Utilized two set screws and drilled into shafts but reduced torque
Mechanically
Problem: Turning Mechanism for the wheel module unit
Result: Moment still exists but is greatly reduced with spacer

Problems Encountered
Problem: Data loss and Collisions
Result: Consolidated send and receive lines on individual bus systems and utilized improved power supply
Electrically
Problem: Data transmission Speeds
Result: Utilized a 2400 baud transfer rates due to limitations imposed by the FT639 chip even though optimal transfer rate between Basic Stamps was found to be 9600 baud.
Problem: Faulty Connectors/ connections
Result: Reconnecting slave unit several times until communication link established. Investigate better quality connectors.
Problem: Sending data from master to slaves several times before communication sequence established
Result: Integrated system works at times. Problem currently under further investigation.

The Next Generation Model
Solutions to Gear Slippage • use of metal gears to prevent stripping from screws• the use of larger gears to provide a better contact for the set screws• modifications to servo motor housing to incorporate a larger diameter size shaft
Speed control with the use of encoders
Hardware ID tags• determine location of module that is plugged in relative to the body• Use of a multiplexer to control data flow • Allows for more uniform integration with the software tagging
Implementation of a Feedback System• Implementing proximity and various other sensors to create a “smart system” creating a feedback loop

Credits
Bob Miller, Wally Szczesniak, Terry Kientz,
Brett Balogh , Siddharth Deliwala, John Bowen,
Darnel Degand, Kapil Kedia,
Adrian Fox, Christopher Li,
and of course our advisor …
Dr. Jim Ostrowski