Modern Cosmology Introduction - Observational …cmb.physics.wisc.edu/papers/theses/slade...
118
1 Modern Cosmology Introduction Cosmology is the study of the evolution, current state, and future of the universe. Since the earliest history humans have pondered and studied the universe. The oldest of known societies have had creation/evolution myths of the universe. Even today some of the simplest possible questions one could ask about the universe are still unknown. How old is the universe? How large is the universe? What is the fate of the universe? We have been asking these questions for thousands of years with little success, until very recently. We live in a very interesting time for cosmological study. Technology has finally started to catch up with our questions. Within the last 50 years we can actually start trying to answer these questions. Cosmology is one of the sciences where we can not repeat, tweak, or even attempt to change variables in a controlled way, we can only merely observe. The experiment was started long ago. Instead, using the laws of physics we attempt to make models that have attributes matching those we can observe in the universe. Therefore, almost any prediction made in cosmology is a model dependant one. Luckily, our models are starting to match the observable universe quite well. There are several modern theories of the evolution of the universe. Currently the two most popular models are probably the Steady State Universe and the Big Bang Universe. Neither of these theories perfectly predict the universe we observe, but are both constantly being revised as new data and ideas strengthen them. Of the two, the Big Bang theory is certainly the most accepted and popular.
Transcript of Modern Cosmology Introduction - Observational …cmb.physics.wisc.edu/papers/theses/slade...

1
Modern Cosmology Introduction
Cosmology is the study of the evolution, current state, and future of the
universe. Since the earliest history humans have pondered and studied the universe.
The oldest of known societies have had creation/evolution myths of the universe.
Even today some of the simplest possible questions one could ask about the universe
are still unknown. How old is the universe? How large is the universe? What is the
fate of the universe? We have been asking these questions for thousands of years
with little success, until very recently. We live in a very interesting time for
cosmological study. Technology has finally started to catch up with our questions.
Within the last 50 years we can actually start trying to answer these questions.
Cosmology is one of the sciences where we can not repeat, tweak, or even
attempt to change variables in a controlled way, we can only merely observe. The
experiment was started long ago. Instead, using the laws of physics we attempt to
make models that have attributes matching those we can observe in the universe.
Therefore, almost any prediction made in cosmology is a model dependant one.
Luckily, our models are starting to match the observable universe quite well.
There are several modern theories of the evolution of the universe. Currently the two
most popular models are probably the Steady State Universe and the Big Bang
Universe. Neither of these theories perfectly predict the universe we observe, but are
both constantly being revised as new data and ideas strengthen them. Of the two, the
Big Bang theory is certainly the most accepted and popular.

2
The steady state theory proposes that the universe will always be and has always
been. Old stars die to simply have new ones born in their place. The universe
remains, and has always has maintained an equilibrium.
The Big Bang theory proposes that the universe is expanding. The theory states that
galaxies are moving further from each other and the energy density of the universe is
falling. A logical consequence of the Big Bang theory is an eventual heat death of the
universe where photons will continually redshift to longer and longer wavelengths
and matter with grow to sparse to form any structure as we know it today. Since it is
expanding now if we go back in time the universe would have to have been a very
dense, hot place. There are three pillars of modern cosmology, or more formerly the
Big Bang theory: 1) Hubble Expansion 2) Big Bang Nucleosynthysis 3) Cosmic
Microwave Background.
In 1929 Edwin Hubble first discovered that almost all of the nearby galaxies were
moving away from us with velocities proportional to their distance away. Since that
time, this observation has been confirmed and more accurately measured. One of the
most recent
)( LawHubbleDHV o=
Equation 1. V is the velocity of a receding galaxy in km/sec. D is the distance away in Mpc. And Ho is called the Hubble Constant with units of km/sec/Mpc.
measurements of the Hubble Constant is 67 ± 5 km/s/Mpc, measured by the 2dF
Galaxy Redshift Survey. (Hubblecon, 2003) Luckily, we have several independent
ways to measure the Hubble expansion, galaxy distribution surveys, super nova
surveys, and Quasar surveys, to name a few. As more data comes in and technology

3
improves these measurements are quickly converging to similar values. The Hubble
constant is a measure of the velocity of this observed expansion; in addition there is
also evidence at a slight acceleration that has been detected. Assuming that we do not
occupy a special place in the universe, we conclude that everywhere in the universe it
also appears that the surrounding galaxies are receding, or that the entire universe is
expanding everywhere, not just around us. This universal expansion is a fundamental
foundation to modern cosmology, or one of the pillars to modern cosmology.
Astrophysicist Fred Hoyle who was actually against the idea of an expanding
universe and in favor of a “Steady State” universe sarcastically coined the expansion
the “Big Bang” (Hoyle, 2001). He coined the term on his BBC radio series The
Nature of the Universe, in 1950. The name ended up being catchy and was adopted
by the scientific community for the expanding universe theory.
If we attempt to trace the laws of physics backwards in time to understand the
early universe we find the universe must have been a much denser, hotter place than it
is now. It was once so hot that matter, as we know it, could not exist and the universe
was at one time a dense sea of quarks and fundamental particles. At these energy
levels the four fundamental physical forces (strong, weak, electro-magnetic, and
gravity) merged into a Grand Unified Force. Currently we think we understand the
physics of the unification of two, and possibly three of the fundamental forces, strong,
weak, and electro-magnetism. However, we do not yet know how to unify gravity as
well. The energy levels required are far beyond the levels our particle accelerators
can probe and thus beyond our current understanding. Trying to push further back in
time from this point becomes a religious question rather than a scientific one.

4
In the 1930’s Dr. Hans Bethe and others worked out the nuclear reactions that
powered the stars in the universe. It was discovered that heavier elements could be
created fusing lighter elements together through nuclear reactions. It was predicted
that all of the elements we see were created in the nuclear fires of stars. From these
calculations the abundances of elements was predicted in the universe, but were
found to quite off from observations. In 1948 Gamow, Alpher and Herman (Gamow,
1948) predicted that all of the elements could have been created in the big bang
itself. It was later shown by Fermi and Turkevich that coulomb barriers and lack of
stable nuclei with mass 5 and 8 precluded the formation of elements beyond 7Li in the
Big Bang. The most popular theory presently is that most of the universe’s hydrogen
and helium (and lithium) was created from the big bang during Recombination (see
below), and then all of the heavier elements up to iron were created by the nuclear
cores within stars. It is believed the heaviest elements, those heavier then iron were
created during supernova. Current theory predictions and actual observed
abundances of elements match very well, so well that Big Bang Nucleosynthysis
(BBN) is considered second fundamental pillar of modern cosmology.
Now starting with the hot, dense quark soup and letting time again run
forward the universe starts to cool and expand. At this point the mean free path of
any given particle is tiny and the entire universe is within thermodynamic
equilibrium. However, as it cools enough eventually particles start freezing out of
equilibrium when the energy density of the universe roughly approaches their rest
mass energy or chemical potential. The first major component to freeze out are the
neutrinos. If we had sensitive enough telescopes to view them, we should be able to

5
see a uniform cosmological neutrino flux seemingly coming from everywhere in the
sky. The second major components to freeze-out were the photons. The photons
maintained thermal equilibrium amongst the charged particles, and when they
dropped from the reactions the first atoms could be formed. This process is called
“Recombination” but is really a misnomer since it was actually the first time, we
believe, for atoms to have formed. The now mostly-neutral atoms lost several ways
to interact with the photons and thermal equilibrium was lost. These high energy
photons broke free from the matter and except for a gravitational redshift down to
microwave energies have remained untouched and unaltered since the time of
recombination. This Cosmic Microwave Background (CMB) is thus the farthest
away and oldest thing we will ever be able to observe in the universe. (With the
possible exception of the neutrino background, or a gravitational wave background)
Today, we detect these cosmic microwaves uniformly over the entire sky.
Photons from one direction of the sky, thus one edge of the universe, have nearly the
same temperature as those coming from the completely opposite spot in the sky, the
other side of the universe. And in addition, if we take a power spectrum of the
photon distribution, (a plot of the number of photons at a given energy) we fine the
spectrum nearly exactly matches a perfect blackbody distribution of 2.728 K. The
CMB power spectrum is in fact the most perfect example of a blackbody curve ever
to be discovered in nature. This is very strong evidence that the whole universe was
at one time in thermal equilibrium. The Cosmic Microwave Radiation forms the third
pillar of modern cosmology.

6
It would be a useful aside to discuss what is meant by a photon distribution's
temperature. Let us assume we are viewing a photon distribution with a radio
antenna that has an equivalent light collecting area of Ae. The antenna's normalized
power pattern on the sky is given as, Pn(θ, φ). In simpler terms we expect the antenna
to be more sensitive to light directly in front of it, as opposed to light coming from its
side, Pn(θ, φ) quantifies this sensitivity pattern. And finally we need to quantify the
brightness distribution of the photon field itself relative to the center of the antenna
beam, Bν(θ, φ). The total power collected by the antenna per unit bandwidth would
be:
( ) ( )∫∫ Ω= dPBAW ne φθφθν ,,2
1
Equation 2. The total power delivered to an antenna from an incoming photon field.
To then gain the antenna temperature of the distribution, Ta, we simply divide by
Boltzmann's constant kb.
abTkW =
Equation 3. The equivalent antenna temperature.
This relationship is derived by imagining a matched resistor attatched to the antenna
output. Equilibrium would eventually take place heating the resistor to Ta to match
the incoming antenna power.
George Gamow, Ralph Alpher, and Robert Herman first postulated the
existence of the CMB in 1948. (Gamow, 1948) However, they predicted its
blackbody temperature to be 5 K rather then 2.7 K. Later the theory was refined by

7
others including Robert Dicke and James Peebles of Princeton. (Dicke, 1965)
Although a few groups had detected excess background radiation earlier, the
discovery of the CMB is usually credited to Arno Penzias and Robert Wilson of Bell
Telephone Laboratories in 1965. (Penzias, 1965)
The CMB is a near perfectly uniform 2.7253 K ± 0.66 mK (COBE, 1999)
blackbody distribution on the sky after foreground effects like the galactic plane and
the dipole effect are removed. A dipole field is created across the sky due to the earth
motion through the rest frame of the CMB itself. One half of the microwave sky
viewed from the earth is slightly “Hotter”, or blue-shifted, then the other half, red-
shifted. It is believed this is a Doppler shift due to the earths apparent velocity of 370
km/s with respect to the CMB’s rest frame. (Doppler, 1996) The CMB does,
however, have anisotropies on the level of about one part in 105. These anisotropies
were first discovered by the Cosmic Background Explorer satellite (COBE) in 1992.
(COBE, 1999) These deviations are thought to be caused by density fluctuations in
the early universe, possibly quantum fluctuations. In a process known as the Sachs-
Wolfe Mechanism (Sachs-Wolfe, 1967) photons coming from over-dense regions will
be slightly red-shifted relative to those coming from under dense pockets due to the
stronger gravitational fields. These early density fluctuations are also thought to lead
to the matter distribution we see today including the great walls and voids in galaxy
spatial distributions.

8
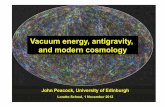
Figure 1. All sky Maps based on 53 GHz (5.7 mm wavelength) observations made with the DMR over the entire 4-year mission (top) on a scale from 0 - 4 K, showing the near-uniformity of the CMB brightness, (middle) on a scale intended to enhance the contrast due to the dipole, and (bottom) following subtraction of the dipole component. Emission from the Milky Way Galaxy is evident in the bottom image. (COBE images, ref)
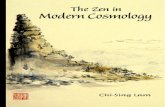
Figure 2. CMB power spectrum measured by the COBE experiment. The solid curve shows the expected intensity from a single temperature blackbody spectrum, as predicted by the hot Big Bang theory. The FIRAS/COBE data were taken at 34 positions equally spaced along this curve. The FIRAS data match the curve so exactly, with error uncertainties less than the width of the blackbody curve, that it is impossible to distinguish the data from the theoretical curve. (COBE images, 2003)

9
Studying the anisotropies of the CMB can teach us a great deal of the universe
as most cosmological models can be constrained by them. If the scatter in the
anisotropy distribution is gaussian, then all of the anisotropy information can be
represented with a two-point autocorrelation function. All of the anisotropy
information can be represented simply by the angular separation between fractional
temperature deviations upon the celestial sphere. (Novikov, 1996)
( ) ( ) ( )cmbcmb T
xT
T
xTC
'rr ∆∆≡Θ
Equation 4. Two-point autocorrelation function. For each angular scale ΘΘΘΘ, , , , we average over all vectors on the sky, x and x’ such that x · x’= cosΘ.
When dealing with distributions upon a sphere it is often useful to expand things
using Legendre polynomials. The useful information is now encoded within the Cl
coefficients.
( ) ( )∑ Θ=Θl ll PCC cos
4
1
π
Equation 5. Two-point autocorrelation function expanded in terms of Legendre polynomials.
This ensemble of Cl coefficients are known as the angular power spectrum of the
CMB anisotropy. Cosmologists often refer to this angular power spectrum when
comparing and constraining various theories. The angular power spectrum for a
given theory often relies heavily upon the fundamental cosmological parameters used,
such as the Hubble Constant: Ho, Critical density: Ωo, etc.

10
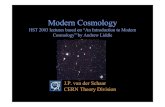
Figure 3. This is a sample CMB angular power spectrum. The actual positions and magnitudes of the wiggles (called acoustic peaks) are model dependant on various cosmological parameters. The blue boxes are predicted error bars from the upcoming PLANCK satellite mission. A multipole l of ~200 is close to a 1°°°° scale upon the sky. This has been taken from Wayne Hu’s CMB tutorial web page. (Huweb, 2003)
So far we have spoken of the CMB power spectrum and its angular power
spectrum. There is a third aspect of the CMB that also provides a good deal of
scientific information, namely its Polarization. Thomson Scattering at the last
scattering surface is theorized to cause CMB Polarization.
Polarization levels, however, are thought to be only 10% or less then the
anisotropy levels themselves and thus it is a very daunting task to detect such a weak
signal. The first experiment to look for CMB Polarization was realized by Lubin and
Smoot in the late 70’s. (Lubin, 1979) Very recently, the first reported detection of the
CMB Polarization was made by the DASI Collaboration. (DASI, 2002) DASI stands

11
for the Degree Angular Scale Interferometer. DASI is compact microwave
interferometer optimized to detect CMB anisotropy at multipoles l ≅ 140 – 900. The
telescope has operated at the Amundsen-Scott South Pole research station since 2000
January.
Before we continue with Polarization it is important that we review Stokes
parameters. Electro-magnetic radiation can have magnitude and Polarization. Since
the Polarizations of the fields are not scalar quantities, it can be mathematically
difficult to keep track of the Polarizations of interacting fields. In 1852
mathematician George Stokes developed scalar quantities called the Stokes
Parameters in which electromagnetic fields could be represented, and thus easily
mathematically manipulated. The stokes parameters are commonly labeled I, Q, U,
and V. I represents the total intensity of the field. Q and U represent the two linear
Polarization states and V represents the circular Polarization.
We may represent and electro magnetic field as follows:
( )( )22
11
cos
cos
:
ˆˆ
δωδω
+−=+−=
+=→
tkzEE
tkzEE
where
yExEE
y
x
yx
Equation 6. The equation of an electromagnetic wave traveling in the positive z direction.

12
We can then define the stokes parameters as follows:
22
21 EEI +=
22
21 EEQ −=
( )2121 cos2 δδ −= EEU
( )2121 sin2 δδ −= EEV
Equation 7. The four scalar Stokes parameters. The < > braces represent time averaging of the electromagnetic fields.
So the total intensity of an electro-magnetic field is I. The total Polarized intensity is
the quadrature sum of Q, U and V. We can define a fractional Polarized intensity as
well.
( )
( )onpolarizatifractionalI
P
ensitypolarizedVUQP
ensitytotalI
≡Π
++≡
=
int
int222
Equation 8. Total intensity, total Polarized intensity, and fractional Polarization defined.
Now it is useful to point out that Polarization is not a vector quantity, but rather a
spinor quantity. A 180° rotation to the direction of a vector is a new vector, however
the same rotation to a Polarization state is again the same state. A useful formula
when transforming between rotated coordinate systems becomes:
( ) ( )( ) ( )θθ
θθ2cos2sin
2sin2cos
UQU
UQQ
+−=′+=′
Equation 9. Transformation of linear Polarizations from one coordinate system into another rotated by an angle θθθθ.

13
Although the stokes parameters are scalar quantities it is still useful to be able to
define or represent the Polarization axis of the field. The Polarization angle α, is
defined as follows:
( )rotationundertiontransforma
Q
U
θαα
α
−⇒
≡ −1tan
2
1
Equation 10. A definition of the Polarization axis and the axis defined after a coordinate rotation by the angle θθθθ. Note, regardless of a rotational coordinate transformation the Polarization axis remains fixed to the sky as one would expect.
Another non-intuitive feature of stokes parameters is that the Q and U “orientations”
are not perpendicular to each other, in contrast to the x and y Polarization states. Q
and U are offset by 45° as opposed to 90°. For example around a circle Q and U
could have these relative positions.
Figure 4. Arbitrary U and Q values around a circle.
Q
U
-Q
-U
-Q
U
Q
-U

14
Thompson Scattering of Polarization
Polarization in the CMB is theorized to be caused by Thompson scattering in the early universe. Thompson scattering can only lead to polarization when the incident radiation has a quadruple distribution about the scatterer. We now follow the notation of Kosowsky, (Kosowsky, 1999) in defining the total Thomson scattering cross section. It is defined as the radiated intensity per unit solid angle divided by the incoming intensity per unit area.
εεπ
σσˆˆ
8
3 •′=Ω
T
d
d
Equation 11. Total Thomson scattering cross-section, defined as the radiated intensity per unit solid angle divided by the incoming intensity per unit area. σσσσT is the total Thomson cross section, εεεε’ and εεεε are the unit vectors perpendicular to the electric fields, and perpendicular to the propagation of the incoming and outgoing fields.
Figure 5. Diagrammatical representation of Thompson scattering. A low energy photon field with no net polarization is incident upon an electron from the left. (blue lines) The electric fields cause the electron to vibrate in all directions ⊥⊥⊥⊥ to the incoming photon field. An observer looking at the process from a 90°°°° angle will only see the electron radiate in one dimension since the other is along their plane of sight. If we then add another incident field of a higher energy from the top. (red lines) the observer would then detect a net polarization in the scattered photons. Diagram taken from (Hu, 1997).

15
Following Kosowsky, we will attempt to derive how only an incoming quadrupole distribution can lead to a net polarization.
Consider a nearly monochromatic, unpolarized plane wave of intensity I’ and cross sectional area σB scattered into the Z direction by a single electron.
I ≡ <ax2> + < ay
2> Q ≡ <ax
2> - < ay2>
U ≡ <2axay Cos[θx - θy] V ≡ <2axay Sin[θx - θy]
It is easiest to break down the resulting scattered radiation into its x, and y components. We define both an incoming and outgoing coordinate system. The incoming system is the primed system, the outgoing system will be the unprimed system. In both the incoming and outgoing coordinate systems the fields will travel in the z direction so the x, and y axis will be perpendicular to the radiation fields. For the outgoing, scattered radiation we define:
( ) ( ) normalizedd
daa
d
daaaaI
yyxxyx Ω′+
Ω′→+≡ σσ 2222
222I
IIQI
IQI
Iyxyx
′=′=′−=+=
Z
Y X
ε’
ε
θ

16
For now lets assume the incoming field, I’ is a single photon. Later we will integrate all the incoming radiation, from all directions upon the scattering electrons. Now we apply Eqn, 11. to both the Ix and Iy outgoing (scattered) components.
( ) ( )[ ] θπσσ
πσσ 222
16
3ˆˆˆˆ8
3CosIjjIjiII
B
Tyx
B
Ty ′=•′′+•′′=
We note that V=0 means Thompson scattering never produces circularly polarized radiation. In our particular choice of coordinates we have also found U=0, but
caution needs to be applied because Q and U can easily rotate into one another depending on the orientations of coordinate systems involved, etc. Now we wish to intergrate over the entire incoming field. It is important to remember that when rotating Q or U into another reference frame a correction factor must be applied in the rotation. The I stokes field needs no such rotation.
Q’ = Q Cos(2φ) + U Sin(2φ) These are used when switching U’ = -Q Sin(2φ) + U Cos(2φ) to another coordinate system.
( ) ( )[ ] IijIiiIIB
T
yx
B
T
x′=•′′+•′′=
πσσ
πσσ
163ˆˆˆˆ
83 22
( )θπσσ 21
163
CosIIIIB
T
yx+′=+=
θπσσ 2
16
3SinIIIQ
B
Tyx ′=−=
0==VU
( ) ( ) Ω′+= ∫ dICosIB
T φθθπσσ
,116
3 2
( ) Ω′= ∫ dICosSinQB
T φθφθπσσ
,)2()(16
3 2

17
To perform this integration we will expand the incoming field in terms of spherical harmonics.
Figure 6. This is a small table detailing the structure of spherical harmonics as well as generation rules. This was taken from the web site: (Nave, 2003) which in turn had taken the information from (Krane, 1987).
To be complete the associated Legendre polynomials equations are as follows:
( ) ( )xPdx
dxxP lm
mmm
l221)( −=
Where the Pl(x)’s are known as the Legendre polynomials. We can also represent the Legendre polynomials easily using the Rodrigues formula:
( ) ( )l
l
l
ll xdx
d
lxP 1
!2
1 2 −=
( ) ( )φθφθ ,,lm
lmlm
YaI ∑=′

18
Now theoretically we have an infinite number of integrations to make since l can run from 0 to ∞ and m can run from –l to l. (both integers) However, there exists a well know relationship that we may apply.
( ) ( ) ( )∫ ∫ =π π
δδφθθφθφθ2
0 0 ''
'*' sin,, llmm
m
lm
l ddYY Where δ is a kronecker delta function. Applying these limits we find only the quadripole terms result in a non-zero solution:
+=
2000 53
4
3
8
16
3aaI
B
Tππ
πσσ
[ ]22
Re152
43
aQB
Tπ
πσσ=
[ ]22
Im152
43
aUB
Tπ
πσσ−=

19
Foreground Contamination
Normally in scientific experiments we are worried about background noise
sources that may obscure, confuse, or limit the data. Study of the Cosmic Microwave
Background also has its share of noise to deal with. However, since the CMB is the
furthest known signal away, all forms of noise are really in the foreground, hence
cosmologists have adopted the term foreground contaminations. For COMPASS, we
are interested especially in polarized foregrounds. Possible contaminants include the
Earth’s atmosphere, synchrotron radiation, free-free radiation, dust emission, and
point sources.
Clouds can be major absorbers and emitters at microwave frequencies. To
really observe the CMB in a ground based experiment it must be done in nearly clear
weather. It is possible to observe during light, overcast conditions as long as the
cloud cover is fairly uniform, but these are far from ideal conditions. Cloud edges
can create polarization effects due to scattering.
In clear skies the greatest contribution to polarization is Zeeman splitting of
oxygen lines within the earths magnetic field. It has been shown that this effect leads
to less then 10-8 fractional polarizations. (Keating, 2000) This results in negligible
contributions at the COMPASS observing frequencies. There is also the possibility
of a Faraday rotation of incoming polarized signals due to the Earth’s magnetic field.
This results in less then a 0.01° rotation at frequencies above 25 GHz, (Keating,
1998) and thus is negligible for the most CMB observations.

20
Of the major polarized foregrounds synchrotron is most likely to be dominant
in the Ka radio band. (26-36 GHz) (Cortiglioni, 1995) Synchrotron radiation is
caused by charged, relativistic particles traveling through a magnetic field.
Synchrotron, like most foregrounds is concentrated along the galactic plane. At high
galactic latitudes synchrotron radiation seems to follow a power law distribution. α
is the spectral index, and ν is the frequency.
αν∝antT
Synchrotron radiation is naturally strongly polarized. It can be up to 75%
polarized and a relationship has been found relating the total polarization percentage
to its spectral index. (Cortiglioni, 1995)
13
33
++=Π
αα
Equation 12. Relationship between the total polarized percentage and spectral index for synchrotron radiation. (Cortiglioni, 1995)
Free-free emission, is also known as Bremsstrahlung emission, which in German
means braking radiation. High energy electrons passing protons are forced to slow
down, or “brake”, this deceleration of charged particles releases photons.
Bremsstrahlung, like synchrotron also follows a power law, T ∝ ν-α, with α = 2.15 ±
0.02 is large portions of the sky. (Tegmark, 2000) Free-free emission creation is an
unpolarized process, but often occurs in regions where Thompson scattering may
induce up to 10% polarization. (Keating, 2000) (Davies, 1999)
There seems to be two main sources of dust emission, thermal emission and
spinning dust emission. COBE DIRBE and IRAS data support the thermal model for

21
the dust emission. The theory states that most of the dust lies at 20 K. (Kogut, 1996)
The spectrum is shown as thermal dust in fig. 5.
In 1995, excess emission was discovered at 14.5 and 32 GHz that was
inconsistent with synchrotron radiation and highly correlated with the 14.5 GHz
IRAS far-infrared data. (Leitch, 1997) Draine & Lazarian have proposed an emission
mechanism where thermal fluctuations of individual dust grains lead to magnetic
dipole emission, (Draine, 1999) and electric dipole emission (Draine2, 1998) The
excess emission discovered by Leitch et. al. (Leitch, 1997) can be explained by the
Draine & Lazarian models if the interstellar dust holds more then 5% of the available
iron. As further support for the Draine & Lazarian model (Draine2, 1998),
Finkbeiner. et. al. had discovered what appeared to be dust emission with a rising
spectrum that strongly matched spinning dust model predictions. Specifically,
evidence of spinning dust emission at 5, 8, and 10 GHz. was explored. They found
two very promising detections in two particularly dusty regions known as LPH
201.663+1.643, and L 1622.
In particular, the brightest Finkbeiner source, LPH was predicted to peak in the Ka
band, and COMPASS should have had a good chance to confirm its spectral
dependence along with the Finkbeiner data. During the second observing season both
LPH and L 1622 were scanned with the COMPASS telescope. Neither dust region
was detected by COMPASS, and sadly, mechanical pointing problems would not let
us confidently place limits on the detection either because we can not confirm we
properly scanned the regions.

22
The contamination of COMPASS data due to point sources was still an unknown
quantity. The closest current limits on point sources had been set by the NVSS 1.4
GHz sky survey. NVSS stands for the NRAO VLA sky survey. (NVSS, 1998) The
NVSS sky survey was completed in 1998. The survey covers the entire sky north of
declination -40°, or ~10.3 steradians of the sky. The survey included flux density and
10 100 1000Frequency (GHz)
0.01
0.10
1.00
10.00
100.00B
righ
tne
ss T
em
pe
ratu
re (µ K
) Synchrotron
ThermalDust
CMB E-POL
Brem.
DW
CMB B-POLSpinningDust
Ka
Figure 7. Estimated Spectra of Polarized Microwave Foregrounds. The synchrotron spectrum is normalized to the rms brightness temperature of synchrotron at 19 GHz (de Oliveira-Costa, 1999) and assumes 30% polarization. The Bremsstrahlung spectrum is normalized to 30 µµµµK at 10 GHz. (Davies, 1999) and assumes 10% polarization. The spinning dust emission proposed by Draine & Lazarian (Draine2, 1998) is shifted by 2/3 to lower frequencies as prescribed by (de Oliveira-Costa, 1999) and assumes 3% polarization. The thermal dust spectrum assumes 5% polarization (Prunet, 1999), a dust temperature of 18 K, an emissivity index of 1.8 (Kogut, 1996) and uses 3 µµµµK/MJy/sr to scale typical degree scale rms values of ( 0.5 MJy/sr) at 100 microns to 90 GHz. The CMB E-polarization is assumed to be 0.1 of the E-polarization spectrum. Three frequency bands (Ka, W, D) are shown above the spectra. This plot has been taken from Chris O’Dell’s thesis. (O’Dell, 2000)

23
both Stokes Q and U information. The NVSS 1.4 GHz survey has catalogued close to
two million radio sources down to a flux level of 2.5 mJy/beam. (NVSS, 1998) Other
surveys, although far les complete in terms of sky coverage, did add some
information on specific sources up to ~15 GHz. Combining data from the NVSS and
the Green Bank 4.85 GHz survey (Gregory, ref.) gives us some information on the
spectral dependence of many of the brightest sources. For a good review see Tucci
et. al. (Tucci, 2003)
We enlisted the service of the Effelsberg 100m radio telescope to scan the
same region of the sky as COMPASS in a search for potential Polarized point
sources. Dr. Wolfgang Reich of the Max Planck Institute of Radio Astronomy, Bonn,
took the scans over several nights between May 5, 2001 and August 8, 2002.
Unfortunately, the data was taken, but there was little help available to analyze the
data. It was decided that this would be a good project for me to undertake, and it
coordinated well with the COMPASS project.

24
COMPASS Overview
The COMPASS telescope (Cosmic Microwave Polarization At Small Scales) is a
dedicated Polarimeter, built to put limits upon the cosmic microwave Polarization
signal and possible foregrounds. The telescope operates in the Ka band. (26-36 GHz)
COMPASS is located in Pine Bluff Wisconsin. Pine Bluff is a small community
about 20 minutes west of the state capitol, Madison. COMPASS was placed at the
University of Wisconsin’s off campus Pine Bluff Observatory.
COMPASS was the next generation of the POLAR (Polarization Of Large
Angular Regions) experiment that was also located at the Pine Bluff Observatory.
POLAR was a large scale (7° beam) instrument. It rotated about its own zenith axis,
and simply looked straight up. The Pine Bluff Observatory lies at a latitude of 43° 4'
41.88'' N., and a longitude of 89° 51' 54'' W. The latitude gives POLAR (~36) pixels
upon the sky. (O'Dell, 2002) There are several differences between the two
telescopes. Firstly, we took the POLAR 7° beam and added optics shrinking the
beam size to nearly 24 arc minutes. We also mounted the experiment on an azimuth-
elevation rotation base allowing the flexibility of pointing. COMPASS’s new
observing strategy was to create variously sized caps about the north celestial pole by
scanning back and forth in azimuth across the pole. A new building was created at
the observatory specifically for COMPASS. A unique rolling building design was
implemented to shield COMPASS from the elements and allow it to remain fixed and
aligned at all times. And finally we improved nearly all of the telescope subsystems
from cryogenics to the electrical systems.

25
COMPASS has taken data for two observing seasons. A typical observing season
for COMPASS was late fall through late spring. The first season’s data allowed us to
put interesting upper limits on various Polarized foregrounds in the NCP region, as
well as an upper limit on the CMB Polarization. (Farese, 2003) The Second season
unfortunately ran into several problems. Windy weather during the second season
badly damaged the telescopes motion systems, as well as ruined our ability to read
out our azimuthal position.
We noticed during the first season we were having wind loading problems on the
telescopes Azimuth base. Smooth metal drive rollers had a tendency to slip in under
windy conditions. As an improvement for the second observing season we
introduced a direct gear drive system. The new drive system ended up working
perfectly, however the telescope azimuth table itself ended up breaking early in the
season due to this excess torque. The table broke in a way that we could no longer
read the telescopes true position out with our azimuth encoders, and ultimately ruined
our second season of data.
Dr. Phil Farese, my fellow graduate student collaborator on the COMPASS
project, has analyzed the first season of data. (Farese, 2003) The second season's
analysis was to be the data for my thesis. Despite the wind loading problems that
ruined the second season of data, I was able to analyze related data from the
Effelsberg 100m radio telescope near Bonn Germany. We commissioned the
Effelsberg telescope to scan the north celestial POLAR region with its 25” beam to
look for potential point sources in the same sky positions that COMPASS had
covered and at the same frequencies. Point sources are a possible foreground for any

26
CMB experiment, and knowledge of their magnitude and distribution are crucial for
and CMB analysis.
COMPASS Front End I will now describe the COMPASS telescope in some detail from the front-end
optics to the data acquisition and telescope drive systems. The COMPASS telescope
is an on-axis Cassegrain Telescope. COMPASS’s primary mirror is a 2.6m concave
aluminum mirror donated to the COMPASS collaboration by fellow collaborator, Dr.
Giorgio Dall’Oglio at the University of Roma III. The secondary mirror of the
COMPASS telescope is a 26 cm convex aluminum mirror designed and created at the
University of California, Santa Barbara. The secondary mirror had been mounted on
a specially made expanded polystyrene (Styrofoam) cone support structure. We felt
the Styrofoam cone was a necessary technology in order to lessen sidelobe effects
which plague typical aluminum strut mounted mirrors common on radio telescopes.
Overall the Styrofoam cone seemed a grand success to the experiment. It did
however, poses some problems of its own. The first problem of the cone was that it
increased our system temperature by ~1.6 K, but it induced no noticeable scattering
or Polarization offsets. Another problem the cone presented was the dew that
collected upon it. On average we would loose several hours of data each day due to
the excess loading of the dew until it would evaporate away. In order to lesson this
harmful effect each morning the cone was manually cleaned, and if needed, the
telescope was positioned to sit facing the sun in order to speed the drying process.

27
Precautions were taken to waterproof the foam cone. A sealant was sprayed upon the
cone surfaces to prevent retention of water.
The next optical element in the chain would be the polypropylene window on the
COMPASS Dewar. COMPASS’s window consists of a 20-mil polypropylene
window of ~6 inches in diameter. The plastic window was backed by a microwave-
transparent Gore-tex window for structural support. The window marks the border
between the cryogenic inside of the dewar and the ~300 K outside temperatures,
needles to say we needed to take measures to avoid frost condensing upon the
window. In order to prevent water vapor from condensing upon the window an extra
microwave transparent layer of Volara (Reilly, 1999) was added above the window
with a slightly less the air-tight seal. Volara is a fine-cell crosslinked polyethylene
foam, waterproof and virtually transparent to microwaves. Dry nitrogen from the boil
off of a liquid nitrogen dewar was blown into this region in an attempt to slightly over
pressure the space keeping water vapor out. A power resistor was lowered into the
boiling dewar and an electric current was applied in order to increase the boil off rate.
In additionally the nitrogen blow off was heated. In order to warm the blow off it was
passed via a rubber tube into a metal sheath containing the heating element of a hair
dryer. And finally the metal ring mount of the polypropylene window itself was
wrapped with heater tape and kept warm.
Behind the dewar’s window lies the next optical element of the COMPASS
telescope, the Teflon microwave lens and the microwave feed horn. The COMPASS
telescope is the second stage of the POLAR microwave telescope. POLAR had a 7°
beam upon the sky. The POLAR beam was defined by its feed horn, a near exact

28
copy of the COBE (Cosmic Microwave Background Explorer satellite mission) feed
horn. COMPASS actually also used the same 7° feed horn and in order to integrate it
with the cassegrain system a lens was required. The Teflon lens was also designed at
the University of California at Santa Barbara. It is a convex lens machined with anti-
refractive gratings to prevent standing waves between the horn and the lens. In the
Ka band Teflon has a refractive index, n of 1.429. The lens was slightly offset from
the microwave horn to keep it thermally isolated. The Horn itself sits upon our inner
cold plate at (~20K). There was concern that although the lens is mostly transparent
to microwaves it could absorb infra-red radiation and provide a great heat load on our
cold plate itself. Instead a brace was made to hold the lens slightly off the horn and
heat sunk to our outer, (70K) cryogenic stage.
The COMPASS horn was designed by Dr. Joshua Gundersen, based off of the
COBE horn design. (Cobehorn, 1979) The horn is a conical, corrugated feedhorn with
a circular waveguide output. Then a circular to square transition is introduced and
then we have our Orthomode Transducer (OMT) (OMT, 2003) that separates the
power into its two linear Polarization components. The Orthomode Transducer is a
critical part of the Polarimeter as it alone separates the separate Polarization
components.

29
On each output arm of the Orthomode transducer we have a ~22dB cryogenic isolator
(Isolator, ref). The isolators help prevent cross talk between each signal chain. After
the isolators we then have our main amplifiers. COMPASS uses 26-36 GHz
cryogenic HEMT (High Electron Mobility) amplifiers. The amplifiers were
borrowed from Dr. John Carlstrom of the University of Chicago, and are also some of
the same amplifiers used on the DASI instrument. The HEMTs themselves were built
by NRAO. During the first season of data taking we used HEMTs with NRAO serial
numbers A31 and A32. During the second season we used HEMTs A24 and A27.
Figure 8. COMPASS window, lens and dewar. The light purple is the Volara window. Next sits the polypropylene window in black. The corrugated, Teflon lens is shown in blue. The top of the horn is shown in purple. Red represents the Dewar’s outer shell as well the 70K and 20K heat shields. The window extension is shown in gold and allows more room for the Teflon lens.

30
The HEMTs boost the signal by a factor of (~25dB) and retransmit the signal through
waveguide out of the dewar into our back-end optics.
The Back End
The back end optics of the COMPASS telescope consist of a full correlation
POLARimeter and total power sensitive diode detectors. The back end optics reside
in a RF shielded aluminum box we call the radiometer box or Radbox. Due to
mechanical constraints the Radbox was forced to sit along side of the COMPASS
dewar, as opposed to being in a linear position below it. (It was originally designed
to sit linearly below the dewar in the POLAR experiment.) This forced a careful
examination of our waveguide plumbing between the two entities. Waveguide bends,
both E and H plane, can cause some dispersion to the transmitted signals and
therefore are avoided if at all possible. Perhaps more importantly in our case was the
desire to treat each signal chain identically. We sought to have a similar number of E
plane and H plane bends in each of the two waveguide paths to make them as similar
as possible. In the end we were forced to introduce two additional E plane bends and
two additional H plane bends in each of the two waveguide paths in addition to one
90° twist along each path. In addition flexibility was needed to allow the radiometer
box to slide up and back parallel to the dewar (7 inches). Depending on what
Polarization Stokes parameter we wished to view upon the sky, Q, U, -Q, etc.
mechanical constraints forced us to be able to slide the radiometer box up and back
between two positions for clearance. This was simply solved by adding or removing
two,7 inch, straight pieces of waveguide.

31
Inside the radiometer box are another pair of 22 dB isolators (Isolators, ref) and
then the wave guide pathways are converted into semi-flexible coaxial cables. (Storm,
2003) Next the signals are again amplified approximately 20dB by a set of room
temperature amplifiers. (Amplifiers, 2003) The signals are then down converted to
2-12 GHz. The down conversion was achieved by use of a 38 GHz local oscillator
and a pair of IF mixers. The oscillator signal is split by use of a magic tee. One
branch of the tee’s output has an adjustable phase shifter used for phase matching.
The second branch of the tee has an electronically switched phase adjuster that
switches 0° to 180° at 1 kHz. (967 Hz) This electronic phase shift is later used with a
lock-in amplifier to lock into the true signal.
The now IF signals are amplified one more time via commercial IF amplifiers and
then each of the two arms is split. One half of the split goes directly to a diode
detector, these DC voltages will eventually become our total power channels TP0 and
TP1. The second half of the split signals are multiplexed into three sub-bands: J1 (2-
6 GHz), J2 (6-9 GHz), and J3 (9-12 GHz). Finally these three sub-bands are sent into
correlators (double balanced mixers) (Correlators, 2003) Because of our electronic
180° phase shift introduced earlier, the output of the correlators will be a square wave
modulated at 1 KHz. There will be a DC offset to the correlator output proportional
to the input power into the two polarized states. The correlator and total power diode
outputs are both voltage outputs. From here on we will treat the signals
electronically.
After the total power diode detector and the correlators comes yet another stage of
signal amplification. All 5 data channels, (J1, J2, J3, Tp0, Tp1) enter our pre-

32
amplifier. The COMPASS pre-amplifier circuit is actually the 3rd generation of
amplifier starting back during the POLAR experiment. We found that strong
measures were necessary in order to keep as much noise as possible from entering our
pre-amplifier. The final form of the COMPASS pre-amplifier was contained in its
own aluminum box within the radiometer box itself. The amplifier has SMA cables
as both the inputs and outputs. The correlator outputs themselves are already SMA
cable so it was natural for SMA inputs to our pre-amplifier. The coaxial inputs also
helped to reduce any inductive noise pick up that normal wires could receive.
One drawback to using the SMA cables however was that the outer conductor was
not electrically shielded. The outer conductor is a bare metal shield. We found that
contact between SMA cables or to the other metallic microwave components could
produce excess noise in the signal chains. (Most likely small grounding loop
problems.) To alleviate this problem we simply wrapped the SMA cables in black
electrical tape. This simple fix seemed to solve a great deal of our electrical pick up
problems.
In a further attempt to lesson ground loop problems we also decided to make the
amplifier use differential inputs. To accomplish the differential inputs, the first
component in the amplifier is an AD620 instrumentation amplifier. In the two total
power line chains the next component is an OP 27 operational amplifier. The
correlator chains first have a simple resistor/capacitor high pass filter to kill a dc
component and then the OP 27. The AD620’s gains were individually set on each of
the five signal chains by resistor values. The OP 27’s gains were also set by resistor
values, however one of two resistors could be chosen via the use of an electronic

33
switch circuit, DG201. In this way one of two gains could be chosen, our high and
low gain. This was useful because often times calibration sources were orders of
magnitude brighter then the sky itself and without a separate gain setting could rail
the system.
Channel First Stage Gain Second Stage
Low Gain Second Stage High Gain
TP0 19.4 1.0 94.6 Tp1 19.4 1.0 94.7 J1 38.0 1.0 5.8 J2 38.0 1.0 5.8 J3 38.0 1.0 5.8
Table 1. Pre-amplifier gain stages.
After the second gain stage, the OP 27, the total power channels then entered a 20
Hz low pass elliptical filter, a D74L4L. The correlator channels were also given the
flexibility to enter a 2-stage, four-pole Butterworth filter. However, during our
normal operations we decided to bypass this part of the circuitry, and this stage was
actually shorted.
The entire pre-amplifier was built upon integrated circuit chip sockets. This
proved helpful in the early troubleshooting stage because components could easily be
remove/replaced. In addition, gain resistors could easily be changed or modified
easily without having to re-solder any components.
In the beginning of the observing season we were experiencing several electrical
ground-loop issues. As an attempt to break a possible ground path the front and the
rear of our pre-amplifier are actually referenced from different grounds. Since the
AD620 is a differential input chip no current is allowed to flow past it through the
input leads. The output of the AD620 however has a separate ground reference pin,
and we chose to use a separate ground at this point. The back half of the pre-

34
amplifier and our entire lock-in amplifier up to our data acquisition system was held
at a separate ground then the rest of the telescope. So the pre-amplifier circuit
actually used two separate DC power supplies, one for the front and one for the rear
half of the circuit. This ground separation trick works as long as the two individual
grounds do not float to far away from one another.
Figure 9. A Circuit diagram of a total power chain within the pre-amplifier.

35
Figure 10. A circuit diagram of one of the correlator channel paths through the pre-amplifier.
Ultimately, a 10Ω resistor was used to connect “lock-in ground” (back half of
the pre-amplifier) to the rest of the system through the lock-in amplifier. We choose
to use a star grounding system centered on the actual telescope frame itself. The
radiometer box components were all case grounded, and thus directly grounded to the
center of our star ground, except one component, the 180° phase-shifter. The 180°
phase shifter was isolated from the rest of the case-grounded microwave components
using capton tape. This was necessary because the phase shifter was fed a square
wave signal, and this same signal was also sent to the lock-in amplifier. Since the
lock-in was separated on its own “ground island” the phase shifter needed to remain
on the island as well.
The lock-in amplifier was also located in the radiometer box in a connected but
separate compartment. The 5 signal channels out of our pre-amplifier were directly
fed into the lock-in amplifier. The total power signals actually passed directly
through and were not modified by the lock-in until the very end where we had

36
installed line drivers. On a separate board, outside the radiometer box, a square wave
sine and cosine signal were created. The square wave generator circuit was also held
to the same ground as our lock-in amplifier. The sine signal was sent to the 180°
phase shifter and both the sine and cosine signals were sent to the lock-in board. For
each correlator channel we then attempted to lock into its in-phase and out-of-phase
signal. So now we had 8 main data channels coming out of the lock-in amplifier,
Tp0, Tp1, J1i, J2i, J3i, J1o, J2o, J3o. (In phase and out of phase correlators) Next the
6 correlator channels went through a 20 Hz elliptical filter chip similar to the ones the
total power channels entered in the pre-amplifier. Finally we installed balanced line
drivers for each of the 8 signal channels before they are passed on to our data
acquisition system.

37
Figure 11. COMPASS optical, and back-end electronics diagram. Diagram created by Chris O'dell (O’Dell, 2000).
During the second season we installed one more processing step in our total power
channels between the lock-in amplifier and the data acquisition system. From the
lock-in we once again split the total power channels, one ran straight to the data
acquisition as previously, the second ran into a high pass filter. We call these data
channels TP0_HP, TP1_HP. We also took the difference between the two total
power channels and we both AC and DC coupled this difference. These channels are
named TPQ_DC, and TPQ_AC respectively. All four of these channels are an

38
attempt to get more stable data from our total power channels. The total power
channels suffer greatly from 1/f noise due to sky drifts, clouds, long-term electronic
drifts, etc.
All of the data and housekeeping channels were recorded via a custom-built data
acquisition system created in Santa Barbara. All signal inputs to the data acquisition
system were coaxial BNC inputs. All of the data channels were recorded
differentially, through differential input amplifiers. Other channels including the
telescope position encoders and the tilt meters were also recorded differentially. This
was another attempt to further shield us from potential ground loops. Most of the
other channels we recorded, including mostly housekeeping thermometers, were
recorded single-endedly, meaning they all shared a common ground. The custom-
built data acquisition system was operated via a Toshiba Satellite laptop running
Windows 2000. Both the data acquisition and telescope motion was controlled using
Labview, a software package created by National Instruments. (National Instruments,
2003) For the second season we then had 13 channels, Tp0, Tp1, J1i, J2i, J3i, J1o,
J2o, J3o, Tp0_HP, Tp1_HP, TpQ_DC, TpQ_AC, and our azimuth encoder that we
recorded at 90 Hz. The rest of the channels were sampled a factor of 18 slower (5
Hz), simply because we did not need the other channels so highly sampled, and to
save disk space. The data was recorded to the laptop itself which rested directly upon
the telescope at all times, and was also written to a secondary desk top computer for
back-up purposes. Every 15 minutes a new file was created. We chose 15 minute
long files for the convenience of size and the ease of working with them.

39
Housekeeping and Thermometry
The COMPASS telescope had several thermometers placed around its subsystems
for monitoring purposes. Firstly, there were three thermometers within the dewar
itself. One was placed directly upon one of the HEMT amplifiers, one upon the 20K
cold plate, and one upon the top of our 70K shield very near the Teflon lens in order
to get a handle on its temperature. Inside the dewar we chose to use silicon diodes
created by Lakeshore Cryogenics Incorporated, serial number DT-470. We
positioned 8 thermometers around the back of the primary mirror. As the temperature
of the primary mirror changed during the diurnal cycle and through the season this
could have affected the total loading upon the telescope. We felt it was important to
be able to monitor the various sections of the mirror independently. Uneven solar
heating might possibly be able to set up dipole and quadripole temperature gradients
along the mirror possibly mimicking a polarization signal. Finally we placed one
thermometer on each of 4 quadrants that made up our inner ground screens. Again,
uneven solar heating was a possibility we sought to monitor lest it lead to mock
signals. The external mirror and ground shield thermometers were all National
Instruments LM235 diodes.
Telescope Base and Drive systems
The COMPASS telescope was given an azimuth-elevation pointing system. A
small azimuth rotation table, used in previous UC Santa Barbara South Pole
experiments, was taken and the frame rebuilt in Santa Barbara. During the first
season the azimuth table drive system consisted of 4 evenly spaced, frustum shaped
smooth aluminum rollers that supported the rotation table itself on a large anodized

40
aluminum cone. One of these rollers was attached to an elliptical gear reduction drive
and then to an electric stepper motor. With this system COMPASS could rotate in
either direction, with potentially 360° of motion. The roller to cone size ratio gave a
factor of 6 in mechanical advantage. The elliptical drive granted us a factor of 72 in
mechanical advantage. The stepper motor we were using gave us up to 200 N-m of
holding torque. A central shaft extended below the rotation stage to the underside of
the table. We attached a rotation encoder directly to this shaft in order to find the
position the telescope was pointing at all times. This system was employed during
the entire first season of data taking.
One large drawback of this drive was slippage of the smooth rollers on the smooth
cone during windy conditions. Fortunately, any time the telescope was blown off of
its proper azimuth we could get an accurate reading of its position due to the rotation
encoder at the bottom of the telescope. During strong windy gusts the wind had the
ability to turn the telescope greatly, greatly enough that there was a danger of pulling
out wires and cables that hung off the rotation frame to the ground itself. To fix this
danger we simply inserted hard stops for the telescope using Unistrut. (Unistrut,
2003) This resulted in the telescope periodically being pinned to one side or the other
of the hard stops until the wind died down.
Before the second season of observations we decided to replace the smooth cone
drive system by a direct gear drive system through the central shaft of the telescope.
We ultimately decided to go with a low backlash worm gear drive system. We chose
to use a Series-W "zero backlash" 60:1 right-angle worm gear reducer from Textron.
(Wormgear, 2003) On front of the zero backlash worm reducer we had another

41
(12:1) gear reducer (Gearreducer, ref.) before going to a new powerful stepper motor.
(Superstepper, 2003) The new stepper motor was one of the highest holding torque
steppers we could find.
Our decision was based on the following criteria: For the first season we had
a stepper motor with 1592 oz. -in. of holding torque. Our elliptical gear drive gave us
a mechanical advantage of x60, and the tables roller to cone size ratio gave us an
additional advantage of x6. In order to have an educated guess at the wind loading
torque the telescope actually faced during windy conditions we used force gauges
with a lever arm distance of the telescope frame width during actual windy
conditions. Our best estimate ended up being 33600 oz.-in. This number was
multiplied by a factor of three for safety to 100800 oz.-in. So we found our system
had 1592 oz.-in. x 360 = 573120 oz.-in. of available torque, more then enough as long
as the cone-roller system would not have slid. We decided to look into a direct gear
drive system that could not slide.
When dealing with gears two issues are important, compliance and backlash.
Compliance is motion the system undertakes under stress due to the actual physical
deformation of its components (elastic deformations unless the system is pushed
beyond its elastic limit). Gear axles can bend, soft gear teeth can deform, etc.
Backlash is "slop" between gear teeth where one tooth can slightly move between two
of the opposing gears teeth. Unfortunately, in high performance gear systems one is
often sacrificed for the other. In our particular case we choose to minimize the
backlash. In order to gain the mechanical advantage we would need, we needed at
least two components involved. The backlash in each thus can affect the total

42
backlash. Most commercial gear reduction packages had difficulty meeting our
pointing requirements (A fraction of our 20' beam) with the torque loads required.
Textron did have a worm gear drive system with extremely low backlash and
a 60:1 mechanical advantage. Another important consideration that needed attention
was the efficiency of the gearing systems. Gear systems also have their own internal
friction, and they are usually less efficient at slower speeds. Our particular worm
reducer was only ~62% efficient at transferring torque under 9 r.p.m. 1592 oz.-in. x
60 X .62 = 59222 oz.-in. This still was not enough driving torque to suit our needs.
In actuality things were even worse then they appear since we sought to
actually scan under the windy conditions, as opposed to just holding position against
them. Another important consideration with stepper motors is that the moving torque
is usually only 40-70% of the holding torque.
To solve this problem we decided to do two things, add more gear reduction
and use a more powerful stepper motor. We decided to add a standard 12:1 gear
reducer between the worm gear and the stepper motor. Although this additional gear
reducer was not a low backlash set up, luckily any backlash it did have was reduced
by a factor of 60 due to the worm gear ahead of it. We chose to use a new, stronger
stepper motor made by Pacific Scientific. (Superstepper, 2003)
Serial number/Company K43/Pacific Scientific Holding Torque: 5700 oz.-in. Working Torque: (Under 9 r.p.m.)
~4000 oz.-in.
Rotor Inertia .2293 oz.-in.-s2
Power Requirements: 66-120 Volt, 5 Amp.
Table 2. New stepper motor specifications.

43
In actuality, the x12 gear reducer alone could have handled the telescope
loading but there was once last factor we tried to account for. In talking to stepper
motor engineers there seemed to be a rule of thumb that was followed when designing
stepper motor drive systems. The moment of inertial of the load was not supposed to
exceed the motor "Rotor inertia" by a factor of 10. Unfortunately, several different
engineers swore by the rule but none could derive it or really explain it to me. Taking
into account the various components of the telescope, such as the dewar, radbox,
mirror, etc., I estimated the telescope moment of inertia to be. ~169.044 Kg-m2. The
rule of thumb was to divide this by 9.8 m/s2 and compare it to 10 times the rotor
inertia times any mechanical advantage. For the new stepper motor we had: .2293
oz.-in.-s2 x 720 x 10 = 1651 oz.-in.-s2. For the load: 169.044 kg.-m2 / 9.8 m/s2 =
17.249 Kg-m-s2 = 23953.9 oz.-in.-s2. It is clear we were not even close to fulfilling
this rule of thumb. Obtaining more mechanical advantage was both cost and spatially
difficult. The new stepper motor was the largest we found in production at the time.
Ultimately, we simply decided to try it. We found that the system worked
beautifully. The azimuth turn around points did not seem to cause the drive system
any particular troubles. I believe two things ended up helping us, first, the telescope
always moved quite slowly, and secondly it is significantly harder to back-drive a
worm gear then to front-drive a worm gear. It can take hundreds of times the torque
to back-drive a worm gear even when accounting for its given mechanical advantage.
I believe this aspect softened the turning points and aided the motor in stopping the
momentum of the telescope.

44
Sadly, however, our attempts to push the telescope to running in stronger
winds eventually lead to its failure. The new worm gear drive system attached to the
lower end of the central rotation shaft of the azimuth table. The rotation readout
encoders were then on the bottom end of this shaft. Around mid February the upper
parts of the rotation shaft began loosening due to the constant wind loading
experienced in the Spring winds. Since our rotation encoder was attached below the
drive system, and the break occurred above the driving system we unfortunately
could no longer accurately read out the telescopes azimuthal position. We first
noticed this problem in March 1999, but did not totally understand the initial cause.
We simply re-pointed the telescope using the radio tower and Polaris. Gradually we
became aware of the pointing “looseness” and that it was slowly getting worse as the
season wore on.
We saw two options at the time. We could have taken the telescope apart and
attempted to re-tighten the upper central shaft of the table. Unfortunately this would
have taken a heroic effort. The entire telescope would have had to be disassembled
and brought back to campus. This process would have easily taken us a month worth
of time to remedy. In addition when the worm gear, low-backlash reducer was
attached to the telescope a key pin was tightly driven in to secure it tightly to the main
shaft. Removing this key would be no easy task since driving it in took two graduate
students, two hours and a sledgehammer to insert it. Once fixed the telescope would
need to be taken back out the observatory and reassembled, re-leveled, pointed, etc.
Our second option was to attempt to vigilantly check and correct the pointing as often
as possible and hope that we had several non-windy days left. We decided on the

45
second route at the time. In hindsight the second never actually worked for us, but we
really didn’t have time to implement the first either.
In an attempt to put better checks on our pointing we increased our pointings off of
Polaris, the radio tower, and TAU A. In addition at the very end of the season we
installed a sighting scope mounted to the elevation frame, yet fixed horizontally.
Using the sighting scope and marks we placed on buildings downrange of the
telescope we were able to see if the azimuth pointing was still on in real time without
having to break observations and point off of a celestial source. Also the sighting
scope could be used day or night and even if the sky was cloudy. For a pointing
scope we ended up choosing a simple deer rifle sighting scope. The scope easily had
enough magnification for our needs, was built to be weatherproof, shockproof, and
was relatively inexpensive.
The elevation mount was custom designed in Santa Barbara by Phil Farese. The
elevation mount consisted of a simple swivel with the primary mirror and the dewar
counterbalancing the torque of each other. A linear actuator (Actuator, ref) was
attached to this shaft by using an extending arm. With this arrangement we were able
to swing from ~70° in elevation down to ~ -2° degrees below the horizontal. The
linear actuator did a wonderful job of keeping the elevation locked in place due to a
worm gear reducing box. Our scan strategy involved scanning back and forth in
Azimuth while holding at a constant elevation, so the actuator worked very well.
Upon the end of the shaft another rotation encoder was attached to measure
telescopes elevation.

46
During the second season we did have some troubles with this system. During
the windier days of early February, the persistent wind loading upon the elevation
mount eventually stripped the drive gears within the actuator itself. This incident
unfortunately caused us many headaches. As the gears first began to strip the
motions resulting resembled electrical noise problems we were having in the
elevation control system earlier. Noise glitches in the driving circuitry of the
elevation stepper motor was causing us strange lurching behavior earlier in the season
and we spent some time pursuing this idea again. Eventually the stripped gears were
found and we repaired the actuator arm.
Calibration and Pointing
One of the largest differences between the COMPASS and POLAR experiments
was the ability to point the COMPASS telescope. Finding the true pointing of the
radio telescope could have been a difficult task. There are few sources we can
observe in the night sky that we can see in the real time, time stream, namely the Sun,
Moon, Venus, and Jupiter. (Arguably TAU A as well, Phil claimed he could see it in
real time but I could never confidently say the same) When finding a pointing
solution it is usually easiest to get accurate pointing for one region of the sky and the
farther you look from the region the more of an offset one finds. Since the
COMPASS main scanning strategy was to make a polar cap of the NCP, we
obviously wished to have the pointing offsets best known in this region.
Unfortunately, none of the above radio/visible sources came within (30°) of the NCP
so accurate pointing would have proven difficult. Luckily we had another tool in

47
which we could point the telescope. Approximately 1.2 km from the observation site
a commercial radio tower just peaked over the tree line and was visible to the
telescope, (~120° west of true north) We were able to rent space enough upon the
tower to place our own microwave transmitter. The transmitter was a simple
microwave oscillator (31 GHz) coupled to a wide angle ( 60°) microwave horn. The
oscillator was driven by a square wave chopping power supply running at 5.8 Hz.
The tower source was chopped simply so we would have an easier time picking out
its transmitted signal over that of the tree line, which was unfortunately close. The
tower made it possible four us to accurately align the radio telescope and a small
~100X power optical telescope that we mounted on the side of the primary mirror for
this exact purpose. Theoretically this would have been possible to do with Jupiter
since it was visible to us in both the optical and radio, however the tracking issues
would have made alignment much more difficult. We found ourselves able to co-
align the radio and the optical telescopes within <4'. With confidence in our
alignment we were then able to point off of any star we were able to see visibly in the
night sky. The final pointing offsets were then chosen by taking the pointing data
from the brightest 10 stars near the NCP. A program written by Jon Goldstein of
UCSB was used to calculate our pointing offsets, as well as information such as the
tilt of the telescopes azimuthal axis, angle of misalignment to true north, etc. For a
check of the pointing at various times throughout the season pointings were made of
the star Polaris who’s proximity to the NCP made it very convenient.
COMPASS First Season Observations

48
We started to take the first season of COMPASS data during March of 2001 and
stopped the observing season mid-May. Phil Farese was given the task of analyzing
the first season's data. Of the 1776 total potential hours, 409 were considered good-
weather hours. 72 hours were lost due to strong winds, and 28 hours were lost to
equipment failures. We were left with a total of 309 hours of data. Next, various
noise tests were applied to the data, de-spiking, white noise tests, 1/f tests and the ς
test. (Keating, 2001) After all the final noise cuts, we were left with 144, 123, and
164 good hours in the J1, J2 and J3 correlators respectively.
The first season of data was broken down into sub-seasons called BIGS, BOGS,
SIGS, and BIGS. These stood for (big/small) (inner/outer) ground screens. The
(big/small) referred to the scan size we chose. During different times of the season
we scanned back and forth in azimuth by both .8° and 1.6°. A large portion of the
first half of the season was taken with our outer ground screens in place. (Outer)
refers to the times in which we were using the outer ground screens, and (inner) at the
times we did not.
The outer ground screens were created from construction scaffolding frames. A
wooden frame was built upon the scaffolding and sheet metal pieces were bent to
cover the frame. The entire structure was quite large, nearly 20 ft. tall, and with a
foot-print of 20’x30’ feet on the ground. Luckily the outer ground screens were
designed to still fit within the rolling canvas building. The outer ground screens were
fixed to the ground and did not move with the telescope, as did the inner ground
screens. It was discovered later in the season that the outer ground screens were
creating a rather large offset within the data. The offset had linear, quadratic, and

49
higher order components and the decision was made to remove them. The entire
second season of data was taken without the outer ground screens at all. Zach Lewis,
a former undergraduate in the lab, created the design of the outer ground screens.
COMPASS First Season Analysis and Results A lion’s share of the first season analysis was undertaken by Phil Farese, and was
the bulk of his thesis work. The main analysis I contributed to the first year data was
determination of the beam size and mapping the telescope side-lobes. The
determination of our beam shape ended up being a fairly difficult task. Once the
second season observations were begun the analysis expanded into determination of
the second years beam as well. We had two main tools to probe the beam shape,
Figure 12. A side view of the COMPASS telescope showing the outer ground screens.

50
scans of TAU A and scans of the radio tower. Although we did scan other potential
sources like Jupiter, Venus, and CAS A the signal to noise of these scans made beam
determination rather difficult.
Analysis of the TAU A scans, both calibration and beam size determination, was
undertaken by Dr. Josh Gundersen, another COMPASS collaborator. For beam size
determination TAU A had some good points and some negative points. First, TAU A
gave us an opportunity to get beam sizes for all three of the correlators as well as the
total power channels. The biggest downside to TAU A scans were the low signal to
noise and tricky offsets that needed removal. It was found that two scans of TAU A
in the first season and two scans of TAU A during season two were of a quality to
attempt full-width extractions. Unfortunately, several second season TAU A scans
had to be discarded because of pointing errors. TAU A was not bright enough to see
real time in the data stream and we simply missed it often with second season
pointing issues. The COMPASS total power channels were less sensitive overall and
more susceptible to elevation dependant offsets. The low sensitivity made beam size
determinations with the total power channels near useless with TAU A. However,
after a great deal of work the correlator results converged into an answer.

51
Figure 13. Beam width determinations from First season TAU A scans. Note there is a great deal of scatter within the total power results and this data was ignored. These x and y FWHM values are measured along the azimuth and elevation axis and not necessarily the maximum and minimum values.
The second main tool for beam analysis was scanning of the radio tower. The
radio tower also had some positive and negative aspects. The radio tower had a much
greater signal to noise ratio and allowed us to push much deeper into the side-lobes,
and it could be pointed at, at any time of the day since it sat stationary and did not
rotate with the sky. The radio tower did, however, have some disadvantages as well.

52
It was a single frequency transmitter, and thus was detectable in only one of the three
correlators. In addition it’s location placed it right at the top of the tree line, making
side lobe determination more difficult, especially below the tower in elevation. Some
of the far sidelobe structure we found may very well be from tree scattered signal.
The radio tower sat 1895.3 meters away from the COMPASS telescope. It was
located at an azimuth position of 278.78°, with 0° straight north (a slightly different
value first season).
The source we mounted on the tower sat ~580 feet above the ground and it was
located at an elevation of 3.596° placing it right at the tree line. In order to weather-
proof the microwave transmitter we decided to encase it within a 6” diameter PVC
water pipe. Both ends of the tube were sealed with Zotefoam. (Zotefoam, 2003)
Zotefoam is cross-linked polyolefin foam that was nearly transparent to microwaves
yet water-tight. An AC power cable was strung the 580 foot length of the tower and
made accessible to us near the bottom. Thus to turn the tower off and on a drive to
the tower was necessary. Inside the PVC tube was an AC to DC power converter, a
DC power square-wave chopping circuit, a 100 mW Gunn microwave oscillator, a
large attenuator, and finally a 60° rectangular horn. In addition a simple temperature
control circuit was added to help remove temperature dependant effects with the
Gunn oscillator output power, and to ensure the system had an easier time turning on
in the dead of winter.

53
Figure 14. Tower mounted, microwave source COMPASS used for pointing and beam size analysis. This tube was mounted to a local radio tower with a simple bracket system. This
diagram has been borrowed from Phil Farese’s thesis.
The DC power to the oscillator was chopped at 5.8 Hz in a square-wave pattern.
This was done so that it would be easier to recognize the tower signal out further into
the side lobes, and this proved crucial. Ideally we would have had some sort of
separate signal line that ran from the chopping tower source directly to the telescope
in which we could use to lock directly into the chopping source. Considering the
distance between the tower source and the telescope this would have proven difficult,
not to mention the need to string a cable across a local farmers potato field. This
forced us to attempt locking into the signal indirectly, decoding the pattern from the
data rather then from knowing the chopping state A priori, and limited how far into
the side-lobes we could push. Luckily for us the chopping frequency of the DC
power supply was very stable. This allowed us to lock into the signal through the
time stream via software written in IDL. Knowing the incoming microwave power
from the transmitter chopped on and off allowed us to simply take the difference.

54
Differencing allowed us to ignore the vastly drifting background due to the 300 K tree
line down range between the telescope and the tower. Some cleaning of the
differenced data was needed, specifically an in phase square wave was multiplied by
the data effectively multiplying the tower off data by zero. Applying this technique
to the correlator channels was also possible and fruitful, however, since the
correlators could have both positive and negative signal (correlation and anti-
correlation) locking in was much harder.
Figure 15. This is a small example of the software lock-in procedure. The black represents the raw data. The red represents the differenced signal after a slight cleaning procedure. Note, the slight baseline drift in the original data has been removed.
The tower source power was set high enough to send the J2 correlator channel
to its positive rail (Only the J2 correlator since the tower source was monochromatic.
During the first season we had a different oscillator in the tower source with a
different frequency and only J3 detected signal instead.) near the center of the beam,
however, it was not strong enough to rail the TP0 and TP1 channels. This was a large
advantage since it gave us a beam mapping ability with a much higher dynamic
range. The only catch to this method was properly patching the two channels of data

55
together. This was done by visually matching the slopes of the two beam patterns.
The resulting beam pattern was compiled from the best second season tower scan.
Note the elevation is only mapped above -1° elevation. We could not physically map
lower due to the inner ground screens touching the ground.
Figure 16. The COMPASS composite beam map. (Second season) Red values are 4-42dB down from the positive peak value. Blue areas are 12-40 dB down from an “inverted” peak. White
areas are >41 dB down from either peak. Axis are in degrees from the main beam center.
Another important effect was also examined with the tower scans. The tower
distance was obviously not infinity and we needed to explore the possibility of a near
field distortion in observed beam size. The distance between the near and far field of
a telescope is defined by Eqn. 11. Z is the distance away from the telescope. D is the
diameter of the telescope and λ is the wavelength.

56
λ
22DZ >
Equation 13. The cut off distance between the near and far field of a telescope.
In COMPASS’s case D=160cm., and λ=.967 cm. This leads us to a far field cut off
at: 1.398^105 cm. The distance to the tower was 1.8953^105 cm so the tower was
within the far field of the telescope, but not well into the far field. A calculation of
the near field effect was necessary. The method of calculation of the beam width at
the tower distance was taken from Goldsmith, Quasioptical Systems. (Goldsmith,
2001)
λ=.967 cm. (31 GHz.) Z=1.8953^105 cm. Distance to the tower θo=Angle of beam at z=∞, center to edge, not the full angle. θ=Angle of beam at z=z, center to edge, not the full angle. ωo= beam waist at z=0. ω = beam waist at z=z.
( )( )2
oω
r
2e2
0,
−
==o
zrEπω
Equation 14. Goldsmith's definition of the electric field at the telescope.
If we assume a far field beam width of 18’: θo fwhm = 1.18 θo
'627.718.12
'18
=
=oθ
For the far field limit Goldsmith states:

57
= −
oo πω
λθ 1tan
Solving for ωo we get 138.256 cm. Now the general form of the beam width at an arbitrary distance, z, away from the telescope is given as:
( )
+= −
22
221 1tan
o
o z
z πωλωθ
Equation 15. Beam width at an arbitrary distance, z, from the telescope.
Solving we get θ = 8.0327’ θfwhm = 1.18 θ θfwhm = 9.4782’ Our resulting beam-width is actually 2 times this value: 18.957’
%04.5957.18
00.18957.18 =−
So we found that the beam size from the tower scan is actually 5.04% larger then the true beam width. Compiling the above numbers we find:
fwhm(max) (arcmin.)
fwhm(min) (arcmin.)
Rot. (Deg.)
fwhm(max) Corrected
fwhm(min) Corrected
1st. Season Tower 23.28 ± 2.25 20.60 ± 1.18 0° ± 1.0 22.11 ± 2.13 19.56 ± 1.12 2nd. Season Tower 21.57 ± .25 18.55 ± .20 45° ± .50 20.48 ± .24 17.62 ± .19 1st. Season TAU A 22.2 ± .70 21.5 ± .70 NA NA NA
Table 3. Beam width calculations from tower scans, as well as, TAU A scans in both first and second season. The rotation column refers to the position of the semi-major axis relative to the horizon. The TAU A data axis are not the major and minor axis of the beam pattern, but rather the values along the elevation and azimuth directions.
We found that for the first season data, the radio tower scans and the TAU A scans
were in agreement. It is important to point out the radio tower scans were fit allowing
the routine to fit the semi-major and semi-minor axis, while the TAU A results were
the values along the elevation and azimuth axis. Due to pointing issues, the second

58
season TAU A scans were not fully analyzed. The Rotation column refers to the
orientation of the semi-major axis to the horizon. It is interesting because between
the end of the first season and the start of the second season we decided to rotate the
dewar exactly 45° to switch from observing Stokes U polarization to Stokes Q
polarization. This 45° rotation was directly mirrored in the beam scans.
The POLAR experiment was originally calibrated by the use of a copper wire
grid oriented at a 45° to the optical axis. Two blackbody (Eccosorb CV-3) (Eccosorb,
2003) loads would then be placed, one beyond the grid and one along side, 90° out of
the optical axis.
One load is partially transmitted through the grid into the horn with a portion
reflected out of the beam. The other blackbody load is reflected into the beam, with a
portion of its power transmitted away. This process ends up creating a calculable
Composite View of POLAR WINDOW
POLAR adaptor plate
Upper Window Plate
Volera Plate
Dewar SurfaceLower Window Plate
Figure 17. The calibration method used in the POLAR experiment, and the early testing stages of COMPASS. Shown is the plastic frame that held a piece of polypropylene at 45º with respect to the horn axis. On the right, the 300 K piece of Eccosorb (Eccosorb, 2003) is shown, above the Eccosorb is shown submerged in a Styrofoam container filled with liquid nitrogen. The dewar face and horn are shown below.

59
polarized signal. A simple rotation of this known polarized source about the axis of
the beam was all that was necessary for a calibration of the polarization sensitivity.
For blackbody loads we would use room temperature Eccosorb, and Eccosorb dunked
within a liquid nitrogen Styrofoam container. (Eccosorb, ref.) This setup allowed us
two temperatures, room temperature and 77 K. We could also use the sky itself as
one “blackbody” On a clear day the sky in Madison Wisconsin was found to be
within a couple of degrees from 15° F. For more detail see (O'Dell, 2002).
For COMPASS naturally extending this proved to be difficult mainly due to our
foam cone secondary support. Once the telescope was focused we were unable to
open the secondary cone and thus could not have access to the mirror or window.
The POLAR calibration rig was designed to rotate upon the window itself. In the
early testing stages we did indeed calibrate COMPASS in the above-described
manner, during the season however, we solely had to calibrate off of celestial sources.
We attempted calibration off of Cassiopeia A and Taurus A. Additionally, to be
complete there is also Cygnus A, but it was certainly too weak to calibrate the
COMPASS telescope. Taurus A is probably better known as the Crab Nebula. Both
CAS A and TAU A are supernova remnants that tend to emit some Polarized
microwave radiation. We found CAS A to be to weak as a calibration source and
decided to solely calibrate off of TAU A observations throughout the season. In
addition to the measured intensity found by Johnston and Hobbs (Hobbs, 1969), a
further correction for the decay rate over time (Allers, 1985), and spectral index
(Baar, 1977) was applied to the TAU A calibration. Additional corrections were

60
added for atmospheric absorption, and the conversion from the Raleigh-Jeans to
thermodynamic temperature. For further details see (Farese, 2003).
Source RA Dec Intensity at 30 GHz (Polarized)
References
TAU A 05h 34m 32s 22º 00' 52" 23.5 Jy (Hobbs, 1969)*
CAS A 23h 23m 24s 58º 48' 54" 1.94 Jy (Mason, 1999) CYG A 19h 59m 29s 40º 44' 02" 1.1 Jy (Melhuish, 1999)
Table 4. The three potential polarized calibrators for the COMPASS telescope. Ultimately we only calibrated off of TAU A. *Additional correction factors applied, see text.
An excerpt of the final calibration information for COMPASS as taken from
(Farese, 2003):
Factors J3i J2i J1i Ant. Temperature (K) 1.25 ± 0.20 0.98 ± 0.16 0.79 ± 0.13
Signal (mV) 12.4 ± 0.37 5.15 ± 0.14 3.59 ± 0.16 Gain (K/V) 6.4 ± 1.1 5.01 ± 0.9 4.0 ± 1.6
Table 5. Calibration results for the first season data. Calibration was based soley on Tau A scans. This table is an excerpt from (Farese, 2003)
COMPASS Second Season Observations
The Pine Bluff observatory is situated at the top of a small bluff and therefore
is a fairly windy place. The months of February through March unfortunately are
some of the worst. One of the goals of the second season observation was to push
observations into some of the windier days to obtain more integration time. We
found that even though the new direct gear drive system itself had little trouble with
the wind, winds greater the 20 mph did shake the telescope with its sail-like inner
ground screens rather violently. A decision was made to abort observations if wind

61
conditions rose above ~20 mph. In hindsight observations should have been aborted
earlier.
For the next few months the telescope was in operation 24 hours a day, seven
days a week. Observations were paused, however, on days of precipitation,
particularly windy days, and times where maintenance was required. Unfortunately,
this cut out a considerable chunk of the observing season. On nights where weather
forecasts predicted a greater then ~10-15% chance of precipitation, for example,
operation was shut down. During daylight hours the telescope was near constantly
"baby sat" by either Zak Staniszewski or myself. Zak was also a former
undergraduate of the lab, and a vital part of the second season observational efforts.
Our first observing day in the second season began on Thursday, January 17.
During the remaining month of January we managed to log 73.25 hours of CMB data.
Additionally 59.05 hours of maintenance were recorded. By maintenance hours, I
mean hours where the data acquisition system recorded, but actual CMB data was not
being taken. This included things such as, repair, trouble-shooting problems, pointing
checks, beam maps of the tower, etc. The season is broken down in table #6.
Table 6. Hour break-down of the second observing season.
Month CMB Hours Maint. Hours
Total CMB Hours
Total Maint. Hours
January 73.25 59.05 73.25 59.05 February 159.5 39.86 232.75 98.91 March 227.5 23.75 460.25 122.66 April 33.25 59.02 493.5 181.68 May 19.5 17.9 513 199.58

62
On February 16 after a relatively gusty evening of observations we visually
noticed the telescope pointing to be off by .5 degrees in the azimuth. At the time we
thought it was a simple miss-entered telescope offset, as it was almost exactly .5
degrees off in azimuth. This was the first time we noticed major pointing problems
with the system. It was later found that the pointing slightly before this time was also
untrustworthy. The first two weeks in February had been unusually windy, and with
our new telescope drive system we were determined to push the limits on what winds
we could observe in.
It was discovered by some simple azimuth push tests that there was some new
backlash in the upper sections of the azimuth table. When a fairly large torque was
applied to the telescope frame, (close to what a strong wind gust would apply) we
noticed the backlash. Smaller applied torques did not seem to effect the positioning
however. We concluded that during early February the COMPASS telescope had
suffered sever wind damage. From February 14th on through the rest of the season
care was taken to run the telescope in the lowest winds possible. (<12 mph) The
wind also managed to wreak havoc with our elevation pointing system, but since our
scan strategy was not really dependant on elevation motion to any real extent the
damage done to the observing season was much less extreme.
Once the backlash in the azimuth table was found we had two options on
how to continue: first, we could take the telescope apart, fix problem, and reassemble
to continue the season, and second, we could try to continue the season as we were,
but only observing in low wind conditions. Unfortunately the problem was not with
the newly added drive system, it appeared to be up higher in the table itself. The

63
central shaft of the azimuth table was loosening. To gain access to this central shaft
we would have had to completely remove everything above the azimuth table
including the elevation mount, the dewar, mirror, and foam cone. Then to continue
observations the telescope we would have had to be re-assembled, re-focused, and re-
leveled, and re-pointed, a process that alone could have taken several weeks.
We decided to continue with the observations for the rest of the season
checking the status of the pointing as often as we were able. It was found that as the
season wore on the backlash continued to get worse, both the distance the table was
off position increased, and the amount of torque to misalign it decreased.
At the end of the season I then made an extensive search through the data for
all of the sources that the telescope scanned through the season. It was important to
try to determine exactly when our pointing errors began and to see how much of the
data was potentially salvageable. The criteria I sought were back-to-back pointing of
the same object, be it TAU A, the radio tower, Jupiter, etc. For objects such as
planets it was important that the planet sighting be in similar portions of the sky since
our global pointing solution was most accurate at the NCP and varied to different
degrees away from it. If an object were found to be in the same position, with
pointing offsets small compared to our beam size we decided the data in between
would be usable data. Our telescopes beam pattern ended up being roughly 24
arcminutes in diameter and so I looked for pointing position offsets no larger then 8
arcminutes. After all was said and done I found only 22 hours of our 513-hour
observing season that we could demonstrate had trustable pointing. In addition there
were 135 hours of data taken before the incident that should have been "innocent",

64
but its innocence could not be directly proven. We decided that this small amount of
data would not be significant enough to analyze for cosmological purposes and sadly
choose to abandon the second season observations.
During the observing season we scanned several other objects for calibration,
pointing, or troubleshooting. A breakdown by month is shown in Table #7.
Sightings of Polaris were actually made using our optical spotting scope.
They were done at various times throughout the year to confirm our pointing offsets
were correct. Sightings of TAU A were purely radio in nature since there is no
optical counterpart for the supernova remnant. TAU A served as our primary
calibrator. CAS A, another supernova remnant, was also a potential calibration
source, and was scanned a few times during the beginning of the season. Jupiter,
Saturn, and Mars could be seen both optically and in the radio, therefore they were
excellent pointing confirmation tools. The Tower, referred to our tower mounted
microwave transmitter. The tower was used for several reasons such as radio/optical
alignment, pointing, and it was also used early on to aid in focusing the secondary
mirror.
Month Polaris TAU A CAS A Jupiter Saturn Mars Tower Dust December 1 0 0 1 1 1 1 0 January 3 2 4 2 0 0 4 5 February 1 2 1 0 0 0 1 0 March 2 2 0 0 0 0 3 0 April 2 1 0 0 0 0 1 0 May 5 3 0 1 0 0 0 3
Table 7. These were the second season attempts to scan sources other then the NCP region.

65
The dust sources referred to in table 5 refer to the findings of Finkbeiner, et.
al. (Finkbeiner, 2001) The paper outlines a search of 10 dust regions using the Green
Bank 140 ft. telescope. Specifically, evidence of spinning dust emission at 5, 8, and
10 GHz. was explored. They found two very promising detections in two particularly
dusty regions known as LPH 201.663+1.643, and L 1622. Draine and Lazarian
theorized the "Spinning Dust" emission mechanism. (Lazarian, 2000) The spinning
dust theory predicts the strongest dust emission for the above sources to fall very
close to the COMPASS observing frequency. We sought to place limits, if not detect
the dust emission out-right. Scaling the Finkbeiner results we expected LPH to have
a temperature of ~3.5 mK. This was close to what we should have been able to see.
Ultimately, we did not detect either of these dust regions with the COMPASS
telescope. Even more regrettably, we were unable to even place upper limits to the
dust clouds brightness due to our pointing problems. It was very possible our scan
pattern did not even contain the dust regions.
Effelsberg Analysis
The contamination of COMPASS data due to point sources was still an unknown
quantity, especially point source contamination. The closest current limits on point
sources had been set by the NVSS 1.4 GHz sky survey. NVSS stands for the NRAO
VLA sky survey. (NVSS, 1998) The NVSS sky survey was completed in 1998. The
survey covers the entire sky north of declination -40°, or ~10.3 steradians of the sky.
The survey included flux density and both Stokes Q and U information. The NVSS
1.4 GHz survey has catalogued close to two million radio sources down to a flux level
of 2.5 mJy/beam. (NVSS, 1998) Other surveys, although far les complete in terms of

66
sky coverage, did add some information on specific sources up to ~15 GHz.
Combining data from the NVSS and the Green Bank 4.85 GHz survey (Gregory, ref.)
gives us some information on the spectral dependence of many of the brightest
sources. For a good review see Tucci et. al. (Tucci, 2003)
We enlisted the service of the Effelsberg 100m radio telescope to scan the same
region of the sky as COMPASS in a search for potential Polarized point sources. Dr.
Wolfgang Reich of the Max Planck Institute of Radio Astronomy, Bonn, took the
scans over several nights between May 5, 2001 and August 8, 2002. Unfortunately,
the data was taken, but there was little help available to analyze the data. It was
decided that this would be a good project for me to undertake, and it coordinated well
with the COMPASS project.
I traveled to Germany for two weeks, in order to learn about the Effelsberg data
and begin the analysis process. I was able to stay in guest housing at the Max Planck
Institute for Radio Astronomy in Bonn, as well as tour the Effelsberg telescope
facility itself. While in Germany I was greatly helped into the project by Dr.
Wolfgang and Dr. Patricia Reich. My time was spent learning about how the data
was taken, but mostly learning the analysis software, Ozmapax. Ozmapax was a
multi-purpose Fortran script created on sight at the Max Planck Institute for analyzing
the Effelsberg data. Ozmapax was only designed to run upon a Sun workstation, and
thus much of the analysis was thought to need be done at the Institute. At the end of
my two weeks stay I still had a great deal of the analysis process to complete.
Luckily, I found that I was able to run the program via telneting to the institute from
my home computer in the US.

67
Figure 6. Effelsberg 100m radio telescope near Bonn Germany
Figure 19. Effelsberg telescope support structure and elevation gear. Note the staircase winding up the structure for a scale reference.

68
Effelsberg Telescope and Observation
The North celestial POLAR region was observed at 32 GHz with the Effelsberg
100-m telescope on several nights between May 5, 2001 and August 8, 2002. Quasar
3C286 served as the primary calibrator. We believe the calibration to be accurate
within 10% of the true value. Details of the telescope performance are displayed in
table 1. (See Table 1) In this configuration, the telescope was designed to have a half
power beam width of 25". We estimate, however, slight pointing uncertainty and
small focal differences between individual horn fields reduced the angular resolution
to about 26".
Telescope Beam Width: 26”
Maximum Aperture efficiency: 23%
First Sidelobe maxima/minima: -12 dB/-17 dB
Instrumental Polarization: ≤ 1%
Center Frequency: 32 GHz
Bandwidth: 2 GHz
TB/S [K/Jy]: 1.8
MOD1: Intensity/Polarization 12/2.4 mJy/beam
MOD2: Intensity 4 mJy/beam
Table 8. Basic Observational parameters.

69
Main Calibration Source: Quasar 3C286
Quasar Flux: 2.1 Jy
Percent Polarization: 10%
Polarization Angle 33°
Table 9. Effelsberg Calibration information
The Effelsberg 100m radio telescope was equipped with its 32 GHz set of
receivers in the secondary focus of the telescope. Two separate modules, named
MOD1 and MOD2, allowed for sensitive Polarization and total power measurements.
MOD1 is sensitive to Polarization and, to a lesser degree, to total power signals.
MOD2 is insensitive to Polarization, but is better suited to detect total power signal.
(See Table 1) Both modules are arranged in two linear rows of three horns each. The
horn row orientations were linear and parallel to the ground. The feeds were thus
aligned along the azimuth direction with spacings of 2', 4.3', and 6.3' respectively.
The two rows we offset by 153" on the sky.
Figure 19. This is the horn arrangement for the Effelsberg 32 GHz system used.
The telescope scanning was done in azimuth while holding the elevation constant.
This strategy granted the advantage of constant atmospheric loading for each pass.
We broke the NCP cap into 54 sub regions, and observed all them over the course of

70
several months. This strategy was designed to give fairly even coverage time per
pixel, however, we are still slightly over-sampled nearer the NCP. The physical
scanning rate of the telescope was ~1°/min. We originally planned to do a 1.5°
diameter cap to compliment the COMPASS scan region. Due to improper pointing
corrections our scan region was slightly enlarged to a radius of ~1.25°.
Figure 20. The shows the area of coverage of the Effelsberg scans. The mean has already been removed. Negative areas are blue and positive areas are red. White areas are close to zero. There are 36 total contour levels from -12 dB to +12 dB.
Each horn produced two circularly Polarized signals. The two circularly Polarized
components of each feed were connected by waveguides into a magic-T. The signal

71
difference between two feeds was obtained by a correlation of the magic-T outputs.
The data channels were recorded at 8 ms sampling including the 6 feed horns as well
as the various hardware-differenced channels between horns. Each of the three horns
within a module looks through nearly the same column of air. By differencing the
horn outputs we are able to remove a great deal of atmospheric effects from the data.
We decided to analyze the MOD2 data first. If no sources were detected in total
power then analysis of the MOD1 Polarization data wouldn't likely detect signal
either since we don't expect sources to be almost completely Polarized. After careful
visual inspection and cleaning we applied the Emerson algorithm (Emerson, ref.)
upon these differenced data sets. The Emerson algorithm takes a set of horn-
differenced data and transforms it into the equivalent output of a single horn with
better noise properties. This technique works best if the radio source is smaller then
the distance between the horns. Since three horns have three possible spacings
between them, we had three difference channels per module. Application of the
above algorithm left us with a clean, noise reduced 6 arc second, pixelized "map" of
the sky. It is important to point out that for each azimuthal pass a linear fit was
removed. The azimuthal width of the sub-scans varied from roughly 20' to 51' across
the sky. Therefore our "map" no longer includes any large-scale information > 20'.
The data was then smoothed to a pixel resolution of 24" to be roughly the same
size as our beam upon the sky. Unfortunately we found that a power spectrum of the
24" data did not closely resemble a Gaussian distribution. A good deal of excess
noise was discovered at the tail ends of the distribution. It did however start to
become fairly gaussian when we smoothed the data up to 1' scales. From this point

72
we found 8 pixels that seemed to deviate from the gaussian distribution and thus had
the potential to be possible detections. Inspection of these regions however found
them to be noise glitches rather then actual detections.
In addition we searched for the 5 brightest NVSS 1.4 GHz detections within our
scan region. (See Table 10.) We found no evidence of any of the NVSS sources
within our data.
Name RA (hours) Dec. (degrees) Flux (mJy)
RN 03 ♣ 19.3867 89.48011 2060.1 8C 0029+892 ♥ 11.2102 89.4910 270.1
RN 84 ♣ 335.4623 89.1465 123.4 8C 2241+890 ♥ 334.3781 89.3166 80.3 8C 2152+888 ♥ 320.3999 89.0379 60.6
Table 10. Five brightest point sources detected within our scanning region (>88.75) by the NVSS 1.4 GHz survey. ♣♣♣♣ (Ryle, 1962) ♥♥♥♥(Hales, 1995)
Effelsberg Results We have detected no sources at 32 GHz with the Effelsberg telescope. The noise
floor that we reached had a standard deviation of 6.69 mJy/26" beam in total power
across the entire map. It is important to examine how the noise varies across the map
as well. Since the map was composed of several separate observations taken over
many months, and with slightly non-uniform coverage, it is informative to break the
region into smaller sections for comparison.
Region Standard Deviation mJy/26” beam
Full Cap Map 6.69 Declination > 89.75° 5.24
89.50° ≤ Dec. < 89.75° 5.73 89.25° ≤ Dec. < 89.50° 6.61 89.00° ≤ Dec. < 89.25° 8.17
0° ≤ RA < 45° 5.71

73
45° ≤ RA < 90° 6.46 90° ≤ RA < 135° 7.64 135° ≤ RA < 180° 8.27 180° ≤ RA < 225° 7.55 225° ≤ RA < 270° 6.00 270° ≤ RA < 315° 6.30 315° ≤ RA < 360° 6.96
Table 11. Noise scatter across various sections of the cap map. Note, all of these values have a ±±±± 10% calibration uncertainty.
It is curious that we did not detect the brightest source (RN 03), in our field,
detected by the NVSS 1.4 GHz survey. From this we are able to put a limit on the
sources spectral index, α.
α
=
off f
fFluxFlux
o
Equation 16. Definition of the Spectral index, αααα.
If the flux at a given frequency, f, is known and the spectral index of the source, α, is
also known then we can calculate the flux at another frequency, fo (See Equation #9)
If we then ask how our non-detection limits the spectral index of RN 03 we find α ≥
1.63 assuming that the source would need to be greater then 2α to be detectable.
(95% confidence limit.) As another sanity check we note that the WMAP point
source catalog also did not detect RN 03. The weakest source listed in the WMAP
catalog is .3 ± .1 Jy. (Bennett ref.)
It is useful to convert our flux limit to temperature units so we can see how our
results constrain point source contamination of the Cosmic Microwave Background.
We follow the steps outlined by Taylor, et. al.(Taylor, 2001) We start with the

74
Rayleigh Jeans approximation for the flux density of an unresolved source. (See Eqn.
#17)
2
2
λΩ
=Tk
S b
Equation 17. The Rayleigh Jeans approximation for the flux density of an unresolved source.
S is the flux density, kb is Boltzmann's constant, Ω is the beam solid angle, λ is the
observing wavelength and T is the resulting antenna temperature. Arranging for
temperature and applying the conversion factor between solid angle and multipole
moment (See Eqn. #18) we come up with (See Eqn. #19).
2
24
l
π≅Ω
Equation 18. The conversion factor between solid angle and multipole moment.
2
22
8 πλ
bk
SlT =
Equation 19. Temperature to flux relationship derived above.
If we enter our 1σ flux limit of 6.69 mJy/(26" beam) ± .67 mJy/(26" beam)
and calculate the ∆T point source contamination limits, we find: 12.85 mK ± 1.29
mK for Effelsberg and 4.20 µK ± .422 µK in total power for the COMPASS
angular scales.
COMPASS was designed to measure Polarization and not total power signal.
Although COMPASS did not detect any Polarization it did set an upper limit of E-
mode Polarized anisotropies of 33.5 µK (95\% confidence limit) in the l-range
200-600. (Farese, 2003) In both steep and flat/inverted spectrum sources

75
compiled by Mesa, et. al. (Mesa, 2002) the mean Polarization degree Π,
Π=(U2+Q2)1/2/I was not found to be greater then 1.84 %. Thus if this relationship
holds into the 30 GHz regime we expect little contamination to the COMPASS
data due to point sources and the Effelsberg results concur.
Pine Bluff Observatory
The Pine Bluff Observatory is UW Madison’s own off campus observatory.
The observatory was built in 1958 and is located about 15 miles west of the main
campus. It sits at E. Longitude: -89 28 and a Latitude: 43 04. The facilities include a
36-inch optical reflector, a 16-inch optical reflector, and a dedicated hydrogen
interferometer dedicated to mapping hydrogen in the upper atmosphere. (Reference
here?) In addition the site now contains a new facility that was designed and built for
the COMPASS telescope.
The observatory itself is set in a cleared area on the top of a small bluff
allowing a more commanding view of its surroundings. Unfortunately, this also made
the site fairly windy at times. The roads were well kept around the observatory and in
the two winters we operated in I only failed to make it up the hill in a car once. (An
interesting and scary experience)
It took a bit of searching to come up with the final design for the COMPASS
building. Because of the foam cone and various electrical components the telescope
needed to be sheltered during times of foul weather. Rain, snow, and strong winds
could have harmed the telescope. We also wished the telescope to have full access to
the sky so in addition to the NCP CMB scans we could also scan various point

76
sources and access to our calibration/alignment source mounted near the western
horizon. Precise and repeatable pointing made any scenarios of rolling the telescope
in and out of a building difficult to implement within our budget requirements.
We decided to go with the novel idea of moving the building itself, rather then
the telescope. This allowed us to cover the telescope easily and quickly in times of
bad weather without having to sacrifice the telescope alignment at all. We ended up
using a rolling canvas building created by a company called Bigtop Manufacturing.
(Bigtop, ref) The building consisted of an approximately 30 x 60 foot concrete pad,
the rail mounted canvas shelter, and a separate control room.
Since the building itself moved outlets were built within the concrete slab
itself and extended up from the floor. The receptacles were mounted with in the path
of the front and back doors of the building with the doors open would clear. Iron rails
were mounted to the pad and extended off of the southern side of the pad. Off the
pad, the rails were supported by concrete pillars. The rails themselves extended ~80
feet beyond the pad in order to get the building well away from the telescope during
observations. Since the canvas building was supported by a metal aluminum frame
caution was taken to try to keep it back as far as possible during the observations.
The canvas cover of the building itself was mounted to a large aluminum
skeleton. The UW Physical Plant Engineering department then designed how to
attach the wheels in which the frame could roll upon the rails. For quite a time the
building needed to be opened buy truck winches that were temporarily mounted to the
track until a permanent opening system could be implemented. To close the building
the same winches were used with a set of pulleys to reverse the direction. This

77
temporary system caused many headaches throughout the first season. The building
needed to be pulled straight back otherwise it would bind against the rails. It proved
very difficult to get the two winches to pull at the same speed and it cost us a great
many pulleys and steel cable. During the second season a centrally powered chain
drive mechanism was added and allowed us to open and close the building buy a
touch of a button. Until all the bugs were routed out of the system even the new drive
system broke a few drive chains on one side or the other. The canvas building that
housed the telescope was never really heated, and if open was the equivalent of being
totally outside in a field. The often proved troublesome when repairs were needed
during the cold winter months. Luckily two kerosene heaters were available to roll in
when repairs were needed and managed to warm the building to tolerable levels.
Another problem with the white canvas material was that it was not totally opaque to
light. If repairs were needed during the night and we turned on lights within the
canvas building it would glow like a Chinese lantern. Since we were positioned right
next to an optical observatory this obviously caused some additional problems.
It was, however, necessary to have a heated room where we could work and
place several of the data computers. A company named ???????? (Seabox, ref.)
designs remote heated buildings from sea cargo containers. One of these “rooms”
was set next ro the concrete pad and became our operations center, the Sea Box. The
Sea Box had both heat and air conditioning and made a suitable working
environment.

78
Figure 21. The COMPASS rolling building set back upon its tracks.

79
Appendix A: Vacuum System Design
During the year of 1998 I sent a good deal of time designing and building a 4He
pumping system for our lab and a neighboring lab. Our two labs often deal with
scientific dewars that need be cooled to cryogenic temperatures, < 1 K. To
accomplish this we often use a two-cryogen system, liquid nitrogen and liquid
helium. The liquid nitrogen, which is about 77 K, acts as a heat shield and surrounds
the liquid helium stage that sits at 4 K. Often from the helium stage we attach an
ADR (adiabatic demagnetization refrigerator) which can cool the most sensitive
devices to the mK level. Often the liquid helium stages are pumped on, reducing the
vapor pressure and decreasing the boiling point of the helium. This has the effect of
lowering the helium bath temperature below the normal 4 K.
Liquid helium vapor pumping is a much different operation then normal lab
vacuum applications that simply seek low pressures within various vessels. The two
main differences are, the fact we are pumping helium and not air, and we are often
pumping under relatively high pressure, high flow situations. A third but different
difference is that when pumping cryogenic fluids/vapors ice plugs and Teconis
oscillations (Teconis, 1992) are potential hazards. Ice plugs are formed when water
vapor in the surrounding air is frozen within a pipe or choke point leading to potential
explosive situations. Teconis oscillations are a super-fluid phenomenon in which
violent fluid oscillations can build upon themselves in a cryogenically pumped
system.
In our case we sought to connect two labs on the sixth floor of the physics
building to two large vacuum pumps in the basement. We sought to place the pumps

80
far away for several reasons: The farther downstream the pumps were the less micro-
phonics they would introduce into the lab dewars, the pumps were loud and obtrusive,
and the pumps simply took up a good deal of space. This required us to run piping
straight up for 6 stories and ended up being a large job. To accomplish the task a
climbing harness was acquired and I was chosen to climb up the maintenance shaft in
order to guide and fasten the pipes. We chose to use household pvc pipes for the job
due to cost, availability, and the ability to do the job.
The remaining parts of this appendix are excerpts from a presentation presented
about vacuum system design, and basic vacuum pump and gauge information.

81
Vacuum System Design Considerations
Slade Klawikowski Nov. 9 1998
Outline:
I. Definitions
A. Throughput B. Conductance C. Mean free D. Knudsen Number (flow regimes)
1. What do we use in the lab? II. Electrical Circuit Analogy III. Leaks, Outgassing, other bad guys
A. Ultimate pressure calculation IV. Equations in Molecular Flow Regime V. Types and Ranges of Vacuum Pumps VI. Types and ranges of vacuum gauges

82
Throughput: The amount of gas in pressure-volume units flowing per unit time across some specified cross section. (Temperature must be defined)
-Normally symbolized by: Q Units = (Pressure*Volume) / time = Energy Also: QD = Throughput due to outgassing.
QL = Throughput due to leaks
Conductance: Inverse of the flow Impedance
-Normally symbolized by time
Pumping Speed: The volumetric rate at which a gas is transported across a plane.
- Symbol: S Units: = Volume / time -Note* Same units as conductance, but not quite the same thing!!
Cp
=−
Q
p1 2
p
QS =

83
Mean Free Path:
The average distance a particle travels between successive collisions with other particles:
In reality there is extra factor due to motion of all the molecules:
Collisions of Numbertravelled Distance
Path Free Mean ==λ
)V
N( d
1 =
)/(t) V(
t V =
olume
2elocity2
elocity
ππ olumeVNd ∆∆
λπ
= 1
2 d (N / V)2
P/(RT)= (N/V) T N R = PV
R = d
V ∆t

84
So….
T in Kelvin P in Torr d in cm (Air: d = 3.76*10^-8 cm) (Helium: d = 2.2*10^-8 cm)
Knudsen Number: Kn The Knudsen number is a dimensionless number that determines what regime your vacuum system is in.
λ = mean free path D = characteristic length of vacuum component, (Tube diameter, etc.)
λ = 2.330 *10 T
d-20
2P
KnD
= λ

85
3 Flow Regimes for gasses:
Regime Gas State
Gas Density
Knudsen #
Viscous
Laminar/ Turbulent
High
Kn < .01
Knudsen
Transition
Medium
1 ≥ Κn ≥ .01
Molecular
Tenuous
Low
Kn > 1
1. Viscous Regime: I. Most difficult to deal with II. We need to worry about this in Helium pumping III. Turbulence/ Chaos makes calculation difficult IV. Need Knowledge of pressures 2. Molecular: V. Most understood regime VI. Less pressure dependent VII. We fall in this regime with Turbo pumps etc. 3. Knudsen Regime: VIII. This is just the middle ground between the two extremes. IX. Also difficult to calculate values

86
Typical Lab Values?
Gas Type
Temp. (K)
Pressure (Torr)
Pipe/hose Dia. (in.)
Knudsen # Regime
Air
300
.0001
1.5
12.99 Molecular
Helium
300
.01
1.5
0.379 Knudsen
Air
300
.0001
4.0
4.87 Molecular
Helium
300
.1
6.0
.0095 Viscous
Helium
300
.1
3.0
.019 Knudsen
Electrical / Vacuum Analog: One way to think about vacuum calculations: V= I * R 1/R = I / V C = Q / (p1-p2) Where: V is analogous to the pressure difference

87
I is analogous to the current 1/C is analogous to the resistance

88
For items in series: For items in parallel:
321Total
321Total
321Total
321Total
C C C C C1
C1
C1
C1
R1
R1
R1
R1
R R R R
++=++=
++=++=
C7
Vacuum Chamber
Vacuum Pump
C2
C1
C3
C5
Sn
Sp
1 1 1
S S Cn p Total
= +
: Never let Sn < 80% Sp If it is in your design, get bigger pipes.
C6 C8
C4

89
Unfortunately, Real Life Has Leaks: Leaks, out-gassing etc. provide positive loads on vacuum systems. -They raise the ultimate pressure limit. -To a lesser degree they slow down pump down time. QBad = QD + QE + QL+ QPer Where: QD = Load due to outgassing QE= Load due to evaporation
QL = Load due to Leaks QPer = Load due to permeation
Out-gassing: QD = qD A qD= temp. and material dependent constant A=Surface Area
Evaporation: QE = 3.639 ( T / M)1/2 (pE – p) A M= grams/mole of specific gas pE = vapor pressure of gas
Leaks:

90
QL = ? for most systems… = Massively huge values for 70 ft. PVC runs…
Permeation:
Where: KPer = material dependent constant ∆p= pressure gradient across material (Atmosphere to inside) L= thickness of wall.
Ultimate Pressure possible:
Calculation of Conductances:
QA
Perp=
K
LPer ∆
nUltimate S
P BadQ=

91
Molecular Region: Conductance of a thin aperture:
Conductance of a long pipe (uniform cross section): (long if L > 20 d)
Conductance of short pipes:
P1 P2
2cm in A
grams/mole M
Kelvinin T
) sliters( A 64.3 ==
M
TCma
molegramsM
cmlengthLM
TCmp
/
)(
(cm)diameter inner d
)sliters(
Ld
81.33
==
==

92
Note* Pr is an experimentally determined number. Conductance of Elbows: Conductance of a diaphragm:
L
d
Rule of Thumb:
Treat elbows as straight pipes using an effective length: Leff ≤ (L + 1.33 d)
( )grams/mole M
(K) .
(cm)area A
PA 64.3
2
r
===
= tempTsliters
M
TCmsp
!!!radius! r *Note
8
31
1 =
+≈
r
LPr

93
Ao A
2
2
o
cm s
cm is A )s
liters( )
AA
-(1
A 6.11
iAC
o
md =

94
Conductance’s in the Viscous Region: Complications: Choked Flow: When the flow of a gas in a viscous region reaches the speed of sound. -Usually only need to worry about this in transient behavior and positive pressure systems. -All the equations below have choked counter parts. Conduction of a thin aperture:
Where γ = (Cp / Cv) -Note* This ugly boy is pressure dependent unlike its molecular flow cousin.
γγ
γ
γγ
1
1
2
1
1
2
1
2 1 p
p-1
p
p
1
2
)1(
1
−
−
−=
M
TR
p
pApC Inc

95
Conduction of a long pipe (circular cross section): (L > 20 d)
X. Note* This equation is assuming Room temperature. Conduction for short pipes (Viscous flow region):
CLS = Ugly!!!!! ???? Knudsen Regime:
(Torr) pres. p
(cm) length. L
(cm) Dia.d
2
184 214
+
=
pp
L
dCL
Rule of Thumb: When dealing with short pipes in the viscous regime, treat the pipe as a pipe (as normal) in series with its aperture: CLS = CL + CInc

96
-This is the transition region between the other two extremes. -Most books gloss over it, being beyond the scope of their pages. -Many suggest just using the equations of the closest regime to your system as a rough estimate. -As you can guess it gets ugly as well. Conductance for a long pipe (circular cross section):
( )
+
+
+
= −
η
ηη d
T
M0.1811
d
T
M0.1471
81.3d
10*269.3 23
p
p
M
Tp
L
dC KL
grams/mole M
(Torr) pipe along press. average p
(poise) in viscosity
(cm) in , =
=η
Ld

97
Types of Vacuum Pumps: Mechanical, Piston Pumps: In One Stroke the volume of gas VA is expanded to VA + VB, So our pressure is reduced:
P= initial pressure P’= pressure after one cycle. The minimum obtainable pressure is limited by the dead space below the piston (Our tube connecting the two chambers)
A B
( )BA
A
BV
V
P
P
+=
'

98
Rotary-Vane Pumps:

99
Sliding Vane Pumps:
The two large Helium pumps we have in the basement are of this type.

100
Theoretical Limits of mechanical pumps: -Dead space ruining volume compression. (Volume Suckers) -External pressure against exhaust valve.
Pumping speed curves (Ex. Rotary Vane):

101
Root Pumps:
These pumps are designed to be only loosely-sealed. They can maintain a good vacuum by spinning at very high velocities. (1000-4000+ rpm.)

102
Root Pump pumping Curve:
Root Pumps are limited at the high-pressure end
due to the short mean free path of gas particles flowing in both directions. Also drag prevents them from reach higher operating speeds. Root Pumps need to be operated with a fore pump for best use.
They are limited by the loose sealing at the low pressures, which allow back streaming.

103
Molecular Drag Pumps: (Turbo Pumps) Gas molecules randomly float into the pump where they are physically scattered preferentially due to angled rotating blades. These pumps can spin Very rapidly, (can be faster than 90,000 rpm!) This is why after you turn these off you should not move them right away to let them spin down. Example Turbo Pump Speed Curve

104
Diffusion Pumps: A diffusion pump uses an oil shower to trap gas molecules and pull them out of the system. -Mean Free path of the gas is greater then the throat the gas interacts with the oil through diffusion.
The oil is boiled by a heater at the bottom and forced up through umbrella shaped baffles. These oil “walls” keep forcing the gas molecules to the outport.

105
Typical Diffusion Pump Speed
Area #1: Low pressure limited by the vapor pressure of the oil used. Cooled baffles allow pressures ~10-10 Torr or greater. Area #2: Consistent pumping speed over many decades. Area#3: Mass transfer limit of the pump has been reached. Area #4: Diffusion pump does nothing. (Only roughing pump is effective) -Critical point determines the size of rough pump needed.

106
Other types of vacuum pumps: -Ion pumps: Gas molecules can be ionized by a high temperature filament and removed from the system by a charged cathode. -Vapor Ejector Pumps: These are similar to diffusion pumps in using an oil spray to collect the residual gas. They differ in that the mean free path of the gas is smaller then the throat so the interaction is not diffusion but viscous drag. -Sorption Pumps: Cryogenic temperature pumps that absorb gas molecules into porous crystalline materials. -Cryo-pumps: Cryogenic temperature “bottles” that trap gas by either liquefying it or solidifying it to a surface, thus removed from the rest of the system.

107
Pump Type Pressure
Range Pumping
Speed Comments
Mechanical Piston
High Atm. - ~102 Torr
Low <200 cfm?
Sliding-Vane High Atm. - ~10-3 Torr
Low 5-200 cfm
(Large pumps in basement)
Root Pumps Medium 102 - ~10-4 Torr
Medium 50-500 cfm
Turbo Molecular
Low 10-3 – 10-10 Torr
High 15-2000 cfm
Let spin down. Beware oil damage.
Oil Diffusion Pumps
Low 10-3 – 10-11 Torr
High at least 7,839 cfm. (Varian)
Beware oil mess.
Cryogenic Pumps
Low 10-3 – <10-11 Torr
Low ?
must refill LN trap
Ion Pumps Low 10-3 - <10-11 Torr
Medium (up to ~600 cfm.) (Torr)
Can be delicate, like light bulbs.

108
Vacuum Measuring Devices: Bourdon Gauge: Simple gauge, based on a small tube of oval cross section bent into a coil. One end is sealed and the other is set to the vacuum chamber. As the pressure decreases, the tube flattens and this registers on a calibrated needle. -Depends on atmospheric pressure (which can vary ~40 Torr) -Independent of the gas species being measured. Diaphragm Gauge: measure pressure differences by measuring the deflection of a diaphragm. -Physical indentation may be magnified mechanically, optically or electrically. -Measurement is absolute and does not depend on atmospheric pressure. -Independent of gas species being measured. -Balzer makes baritrons with range:
Atm. 10-5 Torr. -Our lab baritrons can display:
Atm. 10-2 Torr.

109
Thermal Conductivity Gauges: A fixed electrical energy is sent through a filament. Its temperature depends on the thermal conductivity of the gas around it and thus the pressure of the surrounding gas. The temperature may be measured in two ways: -Directly through a thermocouple. -By measuring the resistance of the filament through an electrical bridge circuit. (Like high-pressure sensor on our orange pump.) (called Pirani gauges) -Orange pump gauges Range: Atm. 10-4 Torr -Convectron Vacuum gauges: Similar to the Pirani gauge at low temp, but extends its range by using gravitational convection to get more accurate readings. -Must be held horizontally!! -Cart Pump Gauges. -Range: Atm. 1 mTorr. Ionization Gauges: Hot Cathode Ionization Gauges: Hot electrons created in a wire filament ionize the surrounding gas. These ions then are collected on the anode as a positive current proportional to the pressure present. (Note different gasses have

110
different ionization potentials.) Has the draw back of filaments burning out quickly (like a light bulb) Range: (10-3 - < 10-8) Cold Cathode Ionization Gauges (Penning): Emits electrons from a relatively cold cathode and using magnetic fields bends the flight path of the electron into a helical path. This increased flight-time of the electrons greatly increases their ionization potential. Range: 10-2 – 10-9 Torr. (Like the low pressure gauge on the orange pump.) -Nice thing about ionization gauges is that they can act like pumps themselves. (speed = a few liters/sec)

111
(From Balzers Catalog)

112
Appendix Bibliography:
Handbook of Vacuum Engineering, Steinherz, H. A. Reinhold Publishing Corp. Copyright: 1963 Scientific Foundations of Vacuum Technique, Dushman, Saul John Wiley & Sons Copyright: 1949 A Users Guide to Vacuum Technology, O’Hanlon, John. John Wiley & Sons. Copyright: 1980 Vacuum Engineering calculations, Formulas, and Solved Exercises, Berman, Armand. Academic Press Inc. Copyright: 1992 Vacuum Physics and Techniques, Delchar, T. A. Chapman & Hall Copyright: 1993 “Vacuum Pumps – Diffusion”, World Wide Web Page. http://www.capovani.com/cat/VacuumPumps--Diffusion.html Web Master: [email protected] June 6. 1999. “Torr International Inc.”, World Wide Web Page. http://www.torr.com/ Web Master: [email protected] June 6, 1999.

113
Acronym/Abbreviation Glossary -ADR (Adiabatic Demagnetization Refrigerator) A cryogenic refrigerator able to cool small loads using a strong magnetic field and a paramagnetic salt crystal. The magnetic moments of the salt is aligned via the magnetic field, and while the field is removed heat energy from the load is removed to redistribute the spin states to a higher entropy level.
-BNC (Bayonet Neill Concelman) Invented by and named after Amphenol Engineer Carl Concelman and Bell Labs Engineer Paul Neill and was developed in the late 1940's. A coaxial connector with a bayonet coupling mechanism. This connector is available in 50 Ohm and 75 Ohm versions. This connector has a frequency range of DC (0 HZ) through 4 GHz (50 Ohm version) and DC (0 HZ) through 1 GHz (75 Ohm version).
-CMB Cosmic Microwave Background -COBE Comic Microwave Background Explorer, a satellite experiment launched in (1986) to observe the CMB. -COMPASS (Cosmic Microwave Polarization At Small angular Scales) -Correlators Double balanced mixers made by the Miteq Corporation. -DASI (Degree Angular Scale Interferometer) A compact microwave interferometer optimized to detect CMB anisotropy at multipoles l ≅ 140 – 900. The telescope has operated at the Amundsen-Scott South Pole research station since 2000 January. The telescope was retrofit as a POLARimeter during the 2000 – 2001 austral summer, and throughout the 2001 and 2002 austral winters has made observations of the CMB with sensitivity to all four Stokes parameters. -HEMT (High Electron Mobility Transistors) The main cryogenic amplifiers of the COMPASS experiment. -IDL (Interactive Data Language) A software language that is used frequently in Astronomical data analysis due to its strengths in plotting and displaying. -IF (Intermediate Frequency) In COMPASS’s case this is 2-12 GHz. -Last Scattering Surface, See Recombination. -NRAO (National Radio Astronomy Organization?) (Location?) -NVSS. (NRAO VLA sky survey) A large sky survey made at 1.4 GHz buy the VLA radio telescope in 1998. Before the Effelsberg Polarized point source search the NVSS

114
probably held the best limits on Polarized point sources in the NCP region. (NVSS, 1998) -OMT (Orthomode Transducer) A waveguide device that accepts either circular or square waveguide input. There are two output ports that separate the incoming signal into the x- and y- components of the electric field. -POLAR. (Polarization of Large Angular Regions) A large scale Polarization experiment with roots at the University of Wisconsin at Madison. It was the thesis project of Dr. Brian Keating and Dr. Chris O’Dell both graduates of Wisconsin. COMPASS is the next generation of the POLAR experiment. -PVC sewer pipe. A common house hold plastic plumbing pipe that gains its name from the type of plastic: Polyvinyl Chloride. -Recombination. The time in the early universe when photons dropped from thermal equilibrium and atoms were first allowed to form. Note it is a misnomer, since this the first time atoms were able to form to our knowledge. A related term is the Last Scattering Surface. This refers to the last scattering process the CMB photons had undertaken before dropping out of equilibrium and free streaming away. -Radbox (Radiometer Box). The aluminum box on the COMPASS telescope that contains the back end optical systems. -RF Radio Frequency pertaining to the shielding of electronics from external radio waves that could introduce noise via inductive and capacitive pick up.
-SMA Cables: (Subminiature Version A) A subminiature coaxial connector with screw type coupling mechanism. This connector has a 50 Ohm Impedance. This connector has a frequency range of DC (0 HZ) through 18 GHz.
-VLA (Very Large Array radio telescope) Large radio telescope array located in New Mexico.
Bibliography/References
(Actuator, ref.) (Amplifiers, 2003) Miteq Corporation, http://www.miteq.com/, 2003 (Aller, 1985) Aller, H. D., Reynolds, ApJ, vol. 293, June 15, 1985, p. L73-L75..

115
(Baar, 1977) Baar, et. al., AA, 61(99), 1977. (Bennett, 2003) Bennett, C. L., et. al., 2003, Astro-ph/0302208. (Bigtop, ref.) Big Top Manufacturing, 3255 N. US 19, Perry, Florida 32347 USA http://www.bigtopshelters.com/ (COBE, 1999) J. C. Mather, D. J. Fixsen, R. A. Shafer, C. Mosier, and D. T. Wilkinson, “Calibrator Design for the COBE Far-Infared Absolute Spectrophotometer (FIRAS),” ApJ, vol. 512, pp. 511-520, Feb. 1999. (Cobehorn, 1979) Janssen, M. A., et. Al., IEEE Transactions on Antennas and Propagation, vol. 27, pp. 551-555, July 1979. (COBE images, 2003) Images taken from: World Wide Web Site, http://lambda.gsfc.nasa.gov/product/cobe/, August, 2003. (Correlators, 2003) Miteq Corporation. http://www.miteq.com/, 2003. (Cortiglioni, 1995) Cortiglioni, S., Spolestra, T. A. T., Astronomy and Astrophysics, vol. 302, pp. 1+, Oct. 1995. (DASI, 2002) Leitch, E. M., Et. Al., 2002, Astro-ph/0209476. (Davies, 1999) Davies, R. D., Wilkinson, A., “Polarization of Galactic Foregrounds”, ASP Conf. Ser. 181: Microwave Foregrounds, 1999. (de Oliveira-Costa, 1998) de Oliveira-Costa, A., Tegmark, M., Page, L. A., Boughn, S. P., “Galactic Emission at 19 GHz”, ApJ Lett., vol. 509, pp. L9-L12, Dec. 1998 (Dicke, 1965) R. H. Dicke, P. J. E. Peebles, P. G. Roll, and D. T. Wilkinson, “Cosmic Black-Body Radiation,” ApJ, vol. 142, pp. 414-419, July 1965. (Doppler, 1996) D. J. Fixsen, E. S. Cheng, J. M. Gales, J. C. Mather, R. A. Shafer, and E. L. Wright, “The Cosmic Microwave Background Spectrum from the Full COBE FIRAS Data Set,” ApJ. Vol. 473, pp. 576+, Dec. 1996. (Draine, 1999) Draine, B. T., Lazarian, A., “Magnetic Dipole Microwave Emission from Dust Grains”, ApJ, vol. 512, pp. 740-754, Feb. 1999. (Draine2, 1998) Draine, B. T., Lazarian, A., “Diffuse Galactic Emission from Spinning Dust Grains”, ApJ Lett. Vol. 494, pp. L19-L+, Feb. 1998. (Eccosorb, 2003) Emerson & Cumming Inc. Canton, MA. (617) 821-0737. (Emerson, 1979) Emerson, D. T., Klein, U., Haslam, C. G. T., 1979, AA, 76, 92.

116
(Farese, 2003) Farese et. al., Submitted to Astrophysical Journal, Astro-ph/0308309. (Finkbeiner, 2001) Finkbeiner, D. P.Schlegel, D. J., Frank, C., Heiles, C., “Tentative Detection of Electric Dipole Emission from Rapidly Rotating Dust Grains”, 2001, Astro-ph/0109534. (Gamow, 1948) G. Gamow, “The origin of elements and the separation of galaxies,” Physical Review, vol. 74, pp 505, 1948. (Gearreducer, ref.) (Goldsmith, 2001) Goldsmith, P.F., Gaussian Beam Quasioptical Propagation and Applications, Wiley-IEEE Press, 2001. ISBN: 0-7803-3439-6. (Gregory, ref.) Gregory, P.C., et. al., 1996, ApJS, 103, 427. (Hales, 1995) Hales, S. E. G., et. al., 1995, MNRAS, 274, 447. (Hobbs, 1969) Hobbs, R. W., Johnston, K. J., Bulletin of the American Astronomical Society, 1:244+, June 1969. (Hoyle, 2001) Clayton, J., excerpt from The Source, World Wide Web Site, <http://howardpublishing.com/Books/Books/Chapters/thesource.htm>, August 22, 2001. (Hubblecon, 2003) M. Colless, “Cosmological Results from the 2dF Galaxy Redshift Survey,” May 2003, Astro-ph/0305051. (Hu, 1997) Hu, W., White, M., “A CMB polarization primer”, New Astronomy, vol. 2, pp. 323-344, Sept. 1997, http://background.uchicago.edu/. (Huweb, 2003) W. Hu “A Tour of CMB Physics”, World Wide Web Site, http://background.uchicago.edu/~whu/physics/tour.html, Sept. 3, 2003. (Isolators, ref) PAMTech Inc. Camarillo, CA. http://www.pamtech.com/. 2003. (Keating, 1998) Keating, B, Timbie, P., Polnarev, A., Steinberger, J., “Large Angular Scale Polarization of the Cosmic Microwave Background Radiation and the Feasibility of Its Detection”, ApJ. Vol. 495. pp. 580+, Mar. 1998. (Keating, 2000) Keating, B. A search for Large Angular Scale Polarization of the Cosmic Microwave Background, PhD dissertation, Brown University, 2000. (Keating, 2001) Keating, B. G., et. al., The Astrophysical Journal Letters, Oct. 2001. 560:L1-LL4.

117
(Kogut, 1996) Kogut, A., Banday, A. J., Bennett, C. L., Gorski, K. M., Hinshaw, G., Smoot, G. F., Wright, E. I., “Microwave Emission at High Galactic Latitudes in the Four-Year DMR Sky Maps”, ApJ Lett., vol. 464, pp. L5 +, June, 1996. (Krane, 1987) Krane, K., Introductory Nuclear Physics, Wiley, 1978. (Lazarian, 2000) Lazarian, A., Draine, B. T., 2000, ApJ, 536, L15. (Leitch, 1997) Leitch, E. M., Readhead, A. C. S., Pearson, T. J., Myers, S. T., “An anomalous component of galactic emission:, ApJ Lett., vol. 486, pp. L23 +, Sept. 1997. (Lubin, 1979) P. M. Lubin and G. F. Smoot, “Search for linear Polarization of the cosmic background radiation,” Physical Review Letters, vol. 42, pp.129-132, Jan. 1979. (Mason, 1999) Mason, B. S., et. al., The Astrophysical Journal, 118:2908, 1999. (Melhuish, 1999) Melhuish, S. J., et. al., MNRAS, 305:399, May 1999. (Mesa, 2002) Mesa, D., et. al., 2002, A&A, 396, 463-471 . (Nave, 2003) Nave, C. R. “Hyper Physics”, World wide web site: http://hyperphysics.phy-astr.gsu.edu/hbase/math/sphhar.html. 2003. (National Instruments, 2003) National Instruments, http://www.ni.com/, 2003. (Novikov, 1996) Novikov, D. I., Jorgensen, H. E., "A Theoretical Investigation of the Topology of the Cosmic Microwave Background Anisotropy on the Scale ~1 degree", ApJ, vol. 471, pp. 521+, Nov. 1996. (NVSS, 1998) Condon, J. J., et. al., 1998, AJ, 115, 1693. http://www.cv.nrao.edu/nvss/ (O'Dell, 2002) O'Dell, C. W., 2002, Astro-ph/0201224. (OMT, 2003) Fabricated by Atlantic Microwave, Boston MA http://www.atlanticmicrowave.com/, 2003. (Penzias, 1965) A.A. Penzias and R. W. Wilson, “A measurement of excess antenna temperature at 4080 Mc/s,” ApJ, vol. 142, pp. 419, 1965. (Prunet, 2001) Lazarian, A., Prunet, S., “ Polarized Microwave Emission from Dust”, Nov. 2001, “Astrophysical Polarized Backgrounds”, eds S. Cecchini, S. Cortiglioni, R. Sault, and C. Sbarra. (Labview, ref) National Instruments Inc.

118
(Reilly, 1999) Volara Manufacturer. Reilly Foam Corporation, http:/www.reillyfoam.com, 1999. (Ryle, 1962) Ryle, M. Neville, A. C., 1962, MNRAS, 125, 39. (Sachs-Wolfe, 1967) R. K. Sachs and A. M. Wolfe, “Perturbations of a Cosmological Model and Angular Variations of the Microwave Background,” ApJ, vol. 147, pp. 73+, Jan. 1967. (Seabox, ref.) (Storm, ref) Storm Products Company. http://www.stormproducts.com/, 2003. (Superstepper, 2003) Pacific Scientific, http://www.pacsci.com/, 2003. (Teconis, 1992) I.E. Spradley and S.W.K. Yuan, Prediction of Thermal Acoustic Oscillations (TAO's) in the CLAES Solid CO2 / Neon System, Adv. In Cryogenic Engineering, vol. 37, Part A, Plenum Press, New York, 1992 pp 257. (TAU A paper, ref.) (Taylor, 2001) Taylor, A. C., et. al., 2001, Astro-ph/0102497. (Tegmark, 2000) Tegmark, M., et. al., ApJ, vol. 530, pp. 133-165, Feb. 2000. (Tucci, 2003) Tucci M., et. al., 2003, Astro-ph/0307073 (Unistrut, 2003) Tyco Electrical and Metal Products, http://www.unistrut.com/, 2003. (Wormgear, 2003) TEXTRON Global Power Transmission, http://www.textronpt.com/, 2003. (Zotefoam, 2003) Zotefoams Incorporated, http://www.zotefoams-usa.com/, 2003.