
MODELING PARAGIGMS IN ACT-R -Adhineth Mahanama.V.
48
MODELING PARAGIGMS IN ACT-R -Adhineth Mahanama.V
-
Upload
sebastian-vaughn -
Category
Documents
-
view
219 -
download
0
Transcript of MODELING PARAGIGMS IN ACT-R -Adhineth Mahanama.V.

MODELING PARAGIGMS IN
ACT-R
-Adhineth Mahanama.V

Introduction
• Key Claim of Rules of the Mind (Anderson, 1993): “Cognitive skills are realized by production rules”
• What does this mean?– What predictions does it make about learning?– How does it help explain learning phenomena?

What is ACT-R?
ACT-R is a cognitive architecture, a theory about how human cognition works. Looks like a (procedural) programming
language. Constructs based on assumptions about human
cognitions.
What is ACT-R?
ACT-R is an integrated cognitive architecture. Brings together not just different aspects of cognition,
but of Cognition Perception Action
Runs in real time. Learns. Robust behavior in the face of error, the unexpected,
and the unknown.

What is ACT-R?
ACT-R is a framework Researchers can create models that are written
in ACT-R including ACT-R’s assumptions about cognition. The researcher’s assumptions about the task.
The assumptions are tested against data. Reaction time Accuracy Neurological data (fMRI)
Main claims of ACT-R
1 There are two long-term memory stores, declarative memory and procedural memory.
2 The basic units in declarative memory are chunks.
3 The basic units in procedural memory are production rules.
Procedural Module
• Procedural memory: Knowledge about how to do something.
How to type the letter “Q”. How to drive. How to perform addition.
Procedural Module
Made of condition-action data structures called production rules.
Each production rule takes 50ms to fire. Serial bottleneck in this parallel system.
Declarative Module
Declarative memory: Facts
Washington, D.C. is the capital of the U.S. 2+3=5.
Knowledge a person might be expected to have to solve a problem.
Called chunks

Declarative Knowledge Terms
• Declarative Knowledge– Is the “Working Memory” of a production
system
• A “chunk” is an element of declarative knowledge– Type indicates the “slots” or “attributes”– In Jess, the chunks are called “facts” and the
chunk types are called “templates”

Declarative-Procedural Distinction• Declarative knowledge
– Includes factual knowledge that people can report or describe, but can be non-verbal
– Stores inputs of perception & includes visual memory– Is processed & transformed by procedural knowledge– Thus, it can be used flexibly, in multiple ways
• Procedural knowledge– Is only manifest in people’s behavior, not open to inspection,
cannot be directly verbalized– Is processed & transformed by fixed processes of the
cognitive architecture– It is more specialized & efficient
Knowledge representation: Procedural vs. declarative
This has long been a feature of ACT theories
• Cognition emerges as interaction between procedural and declarative knowledge
Declarative memory contains chunks
• Structured configurations of small set of elements
• Sometimes described as containing “facts”; but real issue is not content, but how they are accessed
Procedural memory: production rules
• Asymmetric condition-action pairs
• Match on buffers, modify buffers

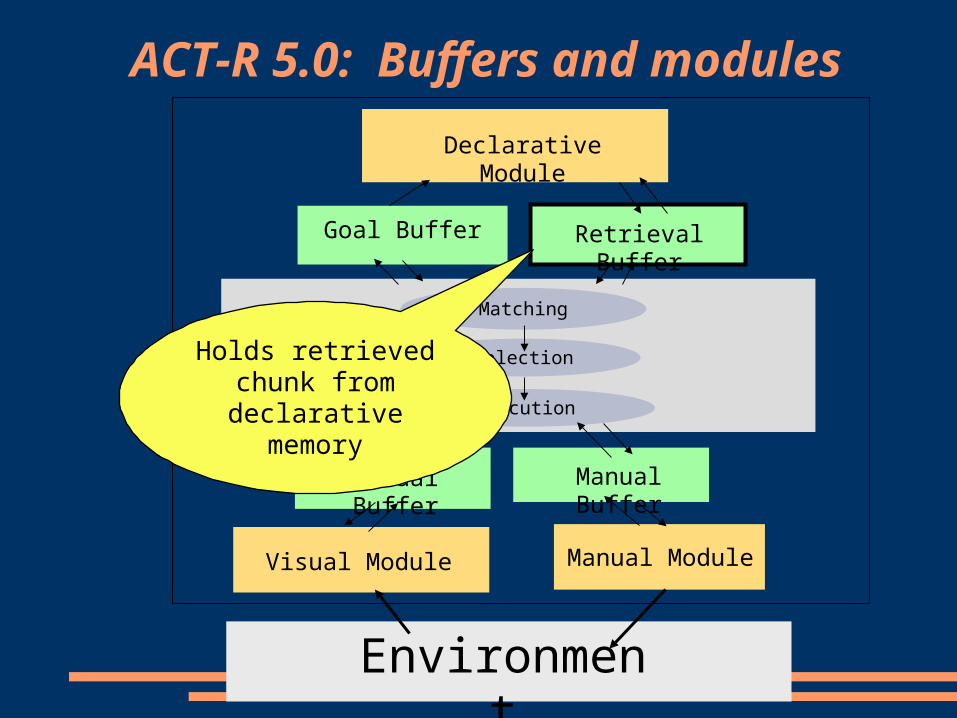
Buffers
The procedural module accesses the other modules through buffers.
For each module (visual, declarative, etc), a dedicated buffer serves as the interface with that module.
The contents of the buffers at any given time represent the state of ACT-R at that time.

Overview of ACT-R 6.0
Environment
Pro
du
ctio
ns
(Ba
sal G
an
glia
)
Retrieval Buffer (VLPFC)
Matching (Striatum)
Selection (Pallidum)
Execution (Thalamus)
Goal Buffer (DLPFC)
Visual Buffer (Parietal)
Manual Buffer (Motor)
Manual Module (Motor/Cerebellum)
Visual Module (Occipital/etc)
Intentional Module (not identified)
Declarative Module (Temporal/Hippocampus)

Environment
Productions
Retrieval Buffer
Matching
Selection
Execution
Visual Buffer Manual Buffer
Manual ModuleVisual Module
Declarative Module
Goal Buffer
ACT-R 5.0: Buffers and modules

Environment
Productions
Retrieval Buffer
Matching
Selection
Execution
Visual Buffer Manual Buffer
Manual ModuleVisual Module
Declarative Module
Goal Buffer
ACT-R 5.0: Buffers and modules
Long term declarative
store (contains chunks)

Environment
Productions
Retrieval Buffer
Matching
Selection
Execution
Visual Buffer Manual Buffer
Manual ModuleVisual Module
Declarative Module
Goal Buffer
ACT-R 5.0: Buffers and modules
Keeps track of where one is
in task; intermediate
results
Environment
Productions
Retrieval Buffer
Matching
Selection
Execution
Visual Buffer Manual Buffer
Manual ModuleVisual Module
Declarative Module
Goal Buffer
ACT-R 5.0: Buffers and modules
Holds retrieved chunk from declarative
memory

Environment
Productions
Retrieval Buffer
Matching
Selection
Execution
Visual Buffer Manual Buffer
Manual ModuleVisual Module
Declarative Module
Goal Buffer
ACT-R 5.0: Buffers and modules
Separate location, object identity
buffers

Environment
Productions
Retrieval Buffer
Matching
Selection
Execution
Visual Buffer Manual Buffer
Manual ModuleVisual Module
Declarative Module
Goal Buffer
ACT-R 5.0: Buffers and modules
Key-strokes, mouse clicks, mouse movements

Environment
Productions
Retrieval Buffer
Matching
Selection
Execution
Visual Buffer Manual Buffer
Manual ModuleVisual Module
Declarative Module
Goal Buffer
ACT-R 5.0: Buffers and modules
Match and modify buffers
The chunk in declarative memory• To use a chunk, production rule is invoked and it requests it from
declarative memory.
• Con figural & hierarchical structure -> different parts of have different roles-> chunks can have sub chunks
• A fraction addition problem contains fractions, fractions contain a numerator & denominator
• Goal-independent & symmetric (chunks are retrieved to achieve some goals)– Rules can be represented as declarative chunks– You can “think of” declarative rules but only
“think with” procedural rules
Paradigms
Five modeling paradigms are discussed in ACT-R.
Instance learning: User previous experiences to guide choices.
Competing strategies: Several strategies compete to solve a problem. Strategies with best probability of success for the lowest cost will be used often.
Individual difference. Perceptual & motor process. Specialization of Task-Independent cognitive strategies.

--> INSTANCE LEARNING

Chunk Activation
Activation of Chunk i
Base-level activation(Higher if used recently)
Attentional weighting ofElement j of Chunk i
Strength of associationof Element j to Chunk i
jAi = Bi + WjSji
Base-level Activation
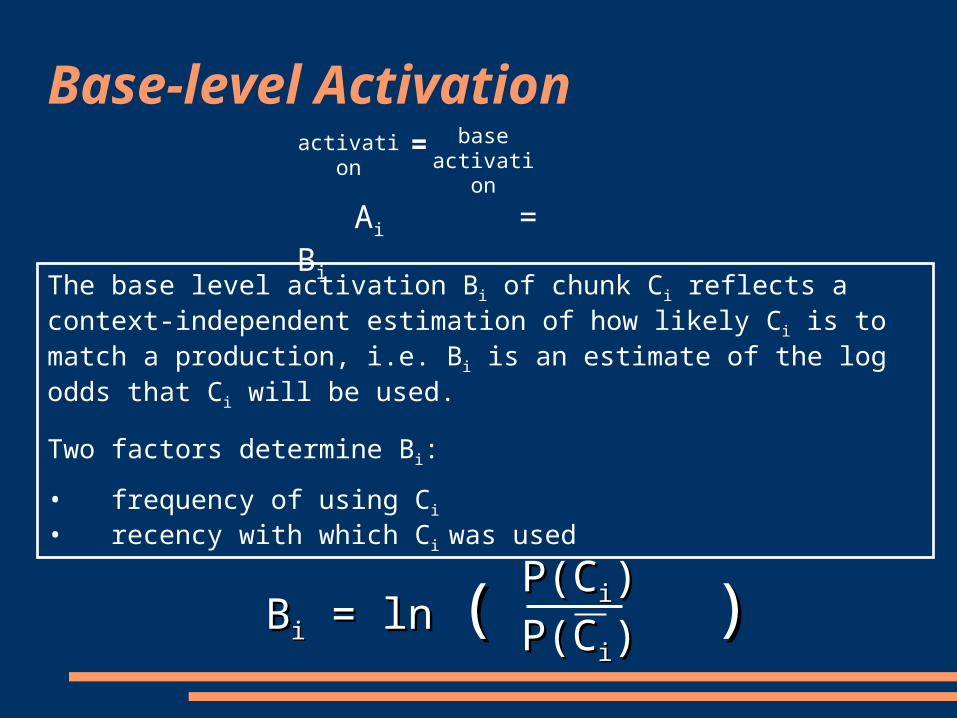
The base level activation Bi of chunk Ci reflects a context-independent estimation of how likely Ci is to match a production, i.e. Bi is an estimate of the log odds that Ci will be used.
Two factors determine Bi:
• frequency of using Ci
• recency with which Ci was used
BBii = ln = ln (( ))P(CP(Cii))P(CP(Cii))
Ai = Bi
baseactivatio
n
activation
=

Probability of Retrieval
The probability of retrieving a chunk is given by
Pi = 1 / (1 + exp(-(Ai - )/s))

Retrieval Time
The time to retrieve a chunk is given by
Ti = F exp(-Ai)
Partial Matching
• The mismatch penalty is a measure of the amount of control over memory retrieval: MP = 0 is free association; MP very large means perfect matching; intermediate values allow some mismatching in search of a memory match.
• Similarity values between desired value k specified by the production and actual value l present in the retrieved chunk. This provides generalization properties similar to those in neural networks; the similarity value is essentially equivalent to the dot-product between distributed representations.
similarityvalue
mismatchpenalty( )*+

Chunk Activation
baseactivatio
n
activation
= +
Activation makes chunks available to the degree that past experiences indicate that they will be useful at the particular moment.
Base-level: general past usefulnessAssociative Activation: relevance to the general contextMatching Penalty: relevance to the specific match requiredNoise: stochastic is useful to avoid getting stuck in local minima
Higher activation = fewer errors and faster retrievals
associativestrength
sourceactivation( )*
A i Bi Wj Sjij MPk Simkl N(0,s)
k
similarityvalue
mismatchpenalty( )*+ + noise
Chunk Activation
The activation of a chunk is a sum of base-level activation, reflecting its general usefulness in the past, and an associative activation, reflecting it’s relevance in the current context.

--> COMPETING STRATEGIES

Production choice and utility learning
Only a single production can fire at a time (a serial bottleneck); the production with the highest utility is selected
The parameters P and C are incrementally adjusted as function of experience
Expected Utility = PG-C
P = Successes/(Successes + Failures)
C = cost of achieving goal if production selected (effort)
G = value of current goal

Undershoot
More Successful
Overshoot
More Successful
Looks
Undershoot
10 Undershoot
0 Overshoot
10 (5) Undershoot
10 (15) Overshoot
Looks
Overshoot
10 (15) Undershoot
10 (5) Overshoot
0 Undershoot
10 Overshoot
INITIAL STATE
desired:
current:
building:
UNDERSHOOT UNDERSHOOTOVERSHOOT
desired:
current:
building:
desired:
current:
building:
desired:
current:
building:
possible first moves
a b c
a b c a b c a b c
Building Sticks Task (Lovett)
Building Sticks Demo
Decide-Under If the goal is to solve the BST task and the undershoot difference is less than the overshoot differenceThen choose undershoot.
Decide-Over If the goal is to solve the BST task and the overshoot difference is less than the undershoot differenceThen choose overshoot.
Force-Under If the goal is to solve the BST taskThen choose undershoot.
Force-Over If the goal is to solve the BST taskThen choose overshoot.

--> INDIVIDUAL DIFFERENCES

3(2x - 5) = 9
6x - 15 = 9 2x - 5 = 3 6x - 5 = 9
Use ACT-R theory to individualize instruction• Cognitive Model: A system that can solve problems in the various
ways students can
If goal is solve a(bx+c) = dThen rewrite as abx + ac = d
If goal is solve a(bx+c) = dThen rewrite as abx + c = d
If goal is solve a(bx+c) = dThen rewrite as bx+c = d/a
• Model Tracing: Follows student through their individual approach to a problem -> context-sensitive instruction

Source Activation
The source activations Wj reflect the amount of attention given to elements, i.e. fillers, of the current goal. ACT-R assumes a fixed capacity for source activation
W= Wj reflects an individual difference parameter.
associativestrength
sourceactivation( )+ *
+ Wj * Sjij
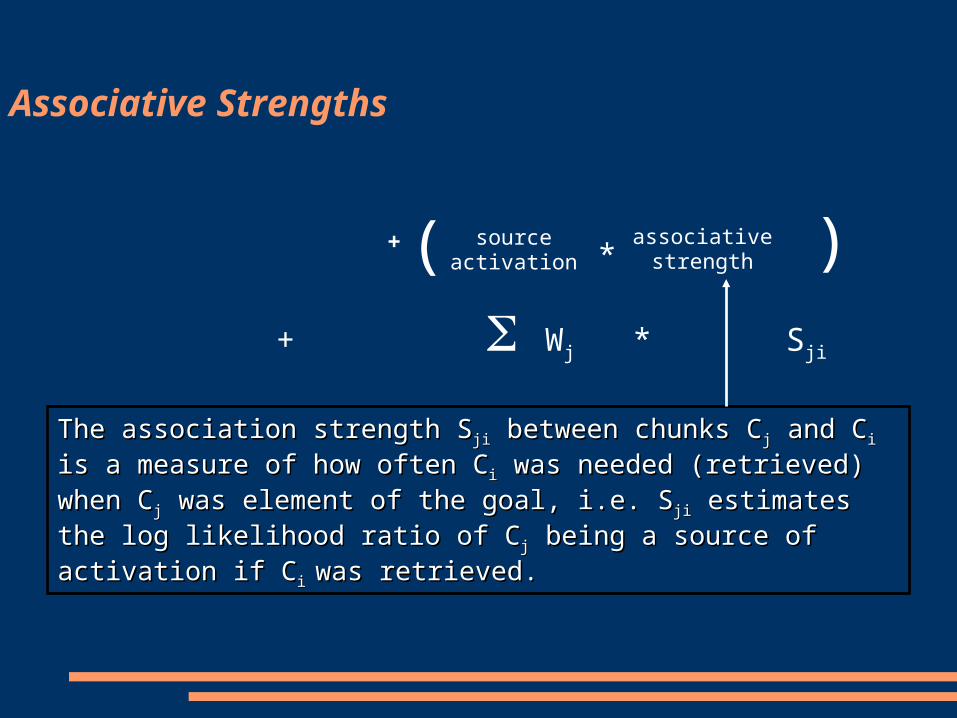
Associative Strengths
The association strength SThe association strength Sjiji between chunks C between chunks Cjj and C and Ci i is a is a measure of how often Cmeasure of how often Cii was needed (retrieved) when C was needed (retrieved) when Cjj was was element of the goal, i.e. Selement of the goal, i.e. Sjiji estimates the log likelihood ratio of estimates the log likelihood ratio of CCjj being a source of activation if C being a source of activation if Ci i was retrieved.was retrieved.
associativestrength
sourceactivation( )+ *
+ Wj * Sji

--> PERCEPTUAL AND MOTOR PROCESSES
Perceptual-Motor Modules
• Takes care of the interface with the “real” world.
Visual module Auditory module Motor module etc

Perceptual-Motor Modules
3 tones: low, med, high 445ms
3 positions: left, middle, right 279ms
Tones and positions 456ms 283ms

Perceptual-Motor Modules

0
0
0
0
0
1
1
1
1
1
3
3
3
3
3
High
Aga ins t
Low
Aga ins t
Neutra l Low
Toward
High
Toward
0
0 .1
0 .2
0 .3
0 .4
0 .5
0 .6
0 .7
0 .8
0 .9
1
Proportion Cho ic e M ore Suc c es s fu l Opera to r
Tes t Prob lem Bias
Observed Data
Biased Condition
Extreme-Biased Condition
0
0
0
0
0
1
1
1
1
1
3
3
3
3
3
High
Aga ins t
Low
Aga ins t
Neutra l Low
Toward
High
Toward
0
0 .1
0 .2
0 .3
0 .4
0 .5
0 .6
0 .7
0 .8
0 .9
1
Tes t Prob lem Bias
0 0
0
0 0
1 1
1
1 1
3 3
3
3 3
High
Aga ins t
Low
Aga ins t
Neutra l Low
Toward
High
Toward
0
0 .1
0 .2
0 .3
0 .4
0 .5
0 .6
0 .7
0 .8
0 .9
1
Proportion Cho ic e M ore Suc c es s fu l Opera to r
Tes t Prob lem Bias
0 0
0
0 0
1 1
1
1 1
3 3
3
3 3
High
Aga ins t
Low
Aga ins t
Neutra l Low
Toward
High
Toward
0
0 .1
0 .2
0 .3
0 .4
0 .5
0 .6
0 .7
0 .8
0 .9
1
Tes t Prob lem Bias
Predictions of Decay-Based ACT-R
(2/3) (5/6)
Lovett & Anderson, 1996
--> SPECILIZATION OF TASK-INDEPENDENT
COGNITIVE STRATIGIES

Some composition principles
1. Perceptual-Motor Buffers: Avoid compositions that will result in jamming when one tries to build two operations on the same buffer into the same production.
2. Retrieval Buffer: Except for failure tests procedural out and build more specific productions.
3. Safe Productions: Production will not produce any result that the original productions did not produce.

Short-term Memories
• Chunks (flat structures) in buffers• One chunk/buffer• Chunk types with fixed slots• Goal, Declarative Memory, Perception• All persistent until replaced/modified
• Long-term identifiers for each chunk • Provides hierarchical structure
declarative memory
red #3 ‘x’ #9 #45
goal
perception
#3
#45
visualization
Summary
• Features of cognition explained by ACT-R production rules:– Procedural knowledge:
• modular, limited generality, goal structured, asymmetric
– Declarative knowledge: • flexible, verbal or visual, less efficient


















