
Modeling of a Wind Turbine Rotor-Blade System and its ...
172
University of Calgary PRISM: University of Calgary's Digital Repository Graduate Studies The Vault: Electronic Theses and Dissertations 2017 Modeling of a Wind Turbine Rotor-Blade System and its Applications Ju, Dayuan Ju, D. (2017). Modeling of a Wind Turbine Rotor-Blade System and its Applications (Unpublished doctoral thesis). University of Calgary, Calgary, AB. doi:10.11575/PRISM/26945 http://hdl.handle.net/11023/4027 doctoral thesis University of Calgary graduate students retain copyright ownership and moral rights for their thesis. You may use this material in any way that is permitted by the Copyright Act or through licensing that has been assigned to the document. For uses that are not allowable under copyright legislation or licensing, you are required to seek permission. Downloaded from PRISM: https://prism.ucalgary.ca
Transcript of Modeling of a Wind Turbine Rotor-Blade System and its ...

University of Calgary
PRISM: University of Calgary's Digital Repository
Graduate Studies The Vault: Electronic Theses and Dissertations
2017
Modeling of a Wind Turbine Rotor-Blade System and
its Applications
Ju, Dayuan
Ju, D. (2017). Modeling of a Wind Turbine Rotor-Blade System and its Applications (Unpublished
doctoral thesis). University of Calgary, Calgary, AB. doi:10.11575/PRISM/26945
http://hdl.handle.net/11023/4027
doctoral thesis
University of Calgary graduate students retain copyright ownership and moral rights for their
thesis. You may use this material in any way that is permitted by the Copyright Act or through
licensing that has been assigned to the document. For uses that are not allowable under
copyright legislation or licensing, you are required to seek permission.
Downloaded from PRISM: https://prism.ucalgary.ca

UNIVERSITY OF CALGARY
Modeling of a Wind Turbine Rotor-Blade System and its Applications
by
Dayuan Ju
A THESIS
SUBMITTED TO THE FACULTY OF GRADUATE STUDIES
IN PARTIAL FULFILMENT OF THE REQUIREMENTS FOR THE
DEGREE OF DOCTOR OF PHILOSOPHY
GRADUATE PROGRAM IN MECHANICAL AND MANUFACTURING ENGINEERING
CALGARY, ALBERTA
AUGUST, 2017
© Dayuan Ju 2017

1
Abstract
In order for wind energy to become a viable replacement for fossil fuels, recent years have seen
an intense effort to address wind turbine efficiency and cost. A significant amount of attention has
been placed on innovative blade design, advanced control strategies, and cost reduction, for
example by minimizing turbine downtime through preventative maintenance. An accurate model
can help in turbine system design, validation, performance evaluation, and optimization. It can
also become an integral part of model-based control and model-based machine health condition
monitoring solutions. This thesis develops a dynamics model for a rotor blade system in horizontal
axis wind turbines. Although there exists the well-known FAST model, its great advantage of
being general purpose also poses great limitations. For example, it does not enable root cause
analysis in machine health monitoring solutions. This thesis proposes to improve model accuracy
by including additional coupling terms.
Our model was validated against FAST while suppressing the coupling terms. By including
the fine details of the coupling between the rotor gross motion and the blade elastic deformation,
blade vibration as a result of load distribution or blade health condition can be observed from rotor
behavior with much greater sensitivity. With the proposed model, we designed an observer in order
to estimate the wind speed from the rotor-blade dynamics response, which will help improve wind
turbine performance. We have also demonstrated the use of our model to investigate the relation
between rotor-blade motion and the generator behavior. The result is helpful in developing
effective techniques for detecting faulty blades from generator signals.

2
Acknowledgements
First and foremost, I would like to express my sincere gratitude to my supervisor Dr. Qiao Sun.
Her sense of value and philosophy, her knowledge, and her kindness have greatly affected me. Her
insightful and critical comments always drive me towards a better work. Having her as my
supervisor is one of luckiest things that ever happened to my life. This thesis would not have been
completed without the help and support from her. I really appreciate everything she has done for
me.
I would like to thank my thesis committee, Dr. Wood, Dr. Pieper, Dr. Xi, and Dr. Kuo for
their insightful comments during my defense. Also, my thanks go to Dr. Ahmad Ghasemloonia
and my colleagues for their suggestions on my research, as well as their valuable advice on how
to structure and write this thesis.
Many thanks to those who appeared in my life and helped me. Thanks for listening to my
problems and helping me get through the tough times. The world is full of love for having nice
people like you. Your help and guidance are always very much appreciated.
Last but not least, I wish to give my deepest gratitude to my family, for their encouragement
and unconditional support during my whole Ph.D. life. It is impossible to finish my Ph.D. project
without your love and support.

3
Table of Contents
Abstract ................................................................................................................................1 Acknowledgements ..............................................................................................................2 Table of Contents .................................................................................................................3 List of Tables .......................................................................................................................6 List of Figures and Illustrations ...........................................................................................7
List of Symbols, Abbreviations and Nomenclature ...........................................................11
CHAPTER ONE: INTRODUCTION ................................................................................15
1.1 Background ..............................................................................................................15
1.2 Problem Statement ...................................................................................................17
1.3 Research Challenges ................................................................................................19 1.3.1 Modeling Challenges and Approach ...............................................................19 1.3.2 Aerodynamics Modeling .................................................................................20
1.3.3 Structural Dynamics Modeling ........................................................................22 1.4 Review of Previous Work ........................................................................................24
1.4.1 Literature Review on Wind Turbine Blade Modelling ....................................24 1.4.2 Effective Wind Speed Estimation ...................................................................25 1.4.3 Blade Vibration Reduction ..............................................................................27
1.5 Organization of the Thesis .......................................................................................28
CHAPTER TWO: HORIZONTAL WIND TURBINE AERODYNAMICS ....................30
2.1 Blade Element Momentum Method .........................................................................30 2.1.1 Actuator Disc Concept ....................................................................................31
2.1.2 Axial Momentum Theory ................................................................................32 2.1.3 Angular Momentum Theory ............................................................................34
2.1.4 Blade Element Theory .....................................................................................37
2.1.5 Tip Loss and Hub Loss ....................................................................................41 2.1.6 Glauert Correction ...........................................................................................42
2.1.7 Blade Element Momentum Theory .................................................................43 2.1.8 An Iteration Procedure for Induction Factor Calculation ................................44
2.2 Generalized Dynamic Wake Method .......................................................................46
2.2.1 Governing Equations .......................................................................................46 2.2.2 Pressure Distribution .......................................................................................48
2.2.3 Induced Velocity Distribution .........................................................................49 2.2.4 Expansion of Governing Equations .................................................................51 2.2.5 Procedure for Generalized Dynamic Wake Calculation .................................55
CHAPTER THREE: STRUCTURAL DYNAMICS MODELING ..................................57 3.1 Coordinate Transformation ......................................................................................57
3.2 Euler-Lagrange’s Approach .....................................................................................60 3.3 The Finite Element Model .......................................................................................62

4
3.3.1 The Finite Element Method .............................................................................62 3.3.2 The Energy Terms ...........................................................................................65 3.3.3 The Finite Element Discretization ...................................................................71 3.3.4 Equations of Motion ........................................................................................74
3.4 The Assumed Mode Model ......................................................................................79
CHAPTER FOUR: MODEL VALIDATION AND ANALYSIS .....................................81 4.1 Solution Algorithm ..................................................................................................83 4.2 Model Validation .....................................................................................................85
4.2.1 Energy Check ..................................................................................................85
4.2.2 Steady Flow Comparison ................................................................................86 4.2.3 Unsteady Flow Comparison ............................................................................88
4.3 Centrifugal Stiffening ..............................................................................................90
4.4 Effect of Gravity on Blade Vibration ......................................................................91
4.5 Coupling Effects ......................................................................................................92 4.5.1 Coupling Effect for a Rotor Blade ...................................................................92 4.5.2 Ice Accretion ...................................................................................................95
4.6 Fluid Structure Interaction .....................................................................................100 4.6.1 Normal Case Comparison ..............................................................................100
4.6.2 Bilinear Stiffness ...........................................................................................101 4.7 Wind Shear ............................................................................................................103
4.7.1 Effects on Individual Blade Response ...........................................................105
4.7.2 Effects on Rotor Response ............................................................................109
CHAPTER FIVE: WIND SPEED ESTIMATION AND INPUT SHAPING .................114
5.1 Wind Speed Estimation .........................................................................................114 5.1.1 Model Linearization ......................................................................................114
5.1.2 Observer Design ............................................................................................117 5.1.3 Results and Comparison ................................................................................119
5.2 Input Shaper Design ...............................................................................................122
5.2.1 Fundamental Concepts ..................................................................................123 5.2.2 Input Shaping Design for Pitch Control ........................................................128
CHAPTER SIX: BLADE MOTION AND GENERATOR RESPONSE........................132 6.1 Generator Model ....................................................................................................132 6.2 Generator Torque Control ......................................................................................134
6.3 Effect of Blade Motion on Generator Voltage Signal ...........................................135
6.4 Broken Blade .........................................................................................................139
6.4.1 Different Wind Speed ....................................................................................139 6.4.2 Different Blade Radial Position .....................................................................144
CHAPTER SEVEN: CONCLUSIONS, DISCUSSIONS AND RECOMMENDATIONS147 7.1 Contributions .........................................................................................................147 7.2 Conclusions and Discussions .................................................................................148 7.3 Future Work ...........................................................................................................151

5
REFERENCE ...................................................................................................................153
APPENDIX A: LEGENDRE POLYNOMIALS AND FUNCTIONS ............................160
APPENDIX B: ELLIPSOIDAL COORDINATE SYSTEM ...........................................165
APPENDIX C: DISTRIBUTED BLADE PROPERTIES AND AIRFOIL DATA ........166
PUBLICATIONS .............................................................................................................170

6
List of Tables
Table 4.1. Characteristics of the 1.5 MW baseline wind turbine .................................................. 82
Table 4.2. Blade flapwise frequencies .......................................................................................... 90
Table 4.3. Blade edgewise frequencies ......................................................................................... 91

7
List of Figures and Illustrations
Figure 1.1. Wind Power Global Capacity and Annual Additions, 2005-2015 ............................. 16
Figure 2.1. Control volume for the actuator disc model ............................................................... 31
Figure 2.2. Annular stream tube control volumes......................................................................... 35
Figure 2.3. Blade element geometry ............................................................................................. 39
Figure 2.4. Induction factor calculation ........................................................................................ 45
Figure 2.5. Numerical solution of GDW model ........................................................................... 56
Figure 3.1. A three-blade horizontal wind turbine: a) HAWT configuration; b) Blade
rotational coordinate ............................................................................................................. 58
Figure 3.2. Blade elastic coordinate .............................................................................................. 58
Figure 3.3. Nodal degrees of freedom in the flapwise direction ................................................... 63
Figure 3.4. Centrifugal force illustration ...................................................................................... 68
Figure 4.1. Operating regions for the 1.5MW baseline wind turbine ........................................... 83
Figure 4.2. Computational algorithm to solve equation ............................................................... 84
Figure 4.3. Energy drift for proposed model. (a) Steady case; (b) Unsteady case. ...................... 86
Figure 4.4. Rotor speed and blade deflection under different steady wind speed. (a) Rotor
speed when wind speed is 10 m/s; (b) Rotor speed when wind speed is 15 m/s; (c) Blade
tip flapwise deflection when wind speed is 10 m/s; (d) Blade tip flapwise deflection
when wind speed is 15 m/s; (e) Blade tip edgewise deflection when wind speed is 10
m/s; (f) Blade tip edgewise deflection when wind speed 15 m/s. ......................................... 87
Figure 4.5. Rotor speed and blade deflection for unsteady wind speed. (a) Wind speed for
simulation; (b) Rotor speed when pitch angle is 7.5 degree; (c) Rotor speed when pitch
angle is 15 degrees; (d) Blade tip flapwise deflection when pitch angle is 7.5 degrees;
(e) Blade tip flapwise deflection when pitch angle is 15 degrees; (f) Blade tip edgewise
deflection when pitch angle is 7.5 degrees; (g) Blade tip edgewise deflection when pitch
angle is 15 degrees. ............................................................................................................... 89
Figure 4.6. Blade tip flapwise deflection comparison. Wind speed 15m/s, pitch angle 15
degrees. ................................................................................................................................. 92
Figure 4.7. Aerodynamic torque, blade flapwise deflection and rotor speed with wind speed
15m/s, pitch angle 15 degrees. (a) Blade tip flapwise deflection; (b) Frequency

8
component of blade 1 deflection; (c) Individual blade aerodynamic torque; (d)
Frequency component of blade 1 torque; (e) Total aerodynamic torque; (f) Frequency
component of total torque; (g) Rotor speed; (h) Frequency component of rotor speed. ...... 95
Figure 4.8. Rotor blade response with bilinear stiffness on blade 3. Wind speed 12 m/s, pitch
angle 15 degrees. (a) Blade flapwise tip deflection comparison (b) Frequency
component of blade deflection; (c) Rotor speed comparison; (d) Frequency component
of rotor speed. ....................................................................................................................... 97
Figure 4.9. Rotor speed response compare with and without coupling. Wind speed 12 m/s,
pitch angle 15 degrees. (a) Rotor speed comparison in time domain; (b) Rotor speed
comparison in frequency domain. ......................................................................................... 98
Figure 4.10. Rotor speed response on different blade position. Wind speed 15 m/s, pitch
angle 15 degrees. (a) Rotor speed comparison in time domain; (b) Rotor speed
comparison in frequency domain. ......................................................................................... 99
Figure 4.11. Individual blade response comparison. Wind speed 15 m/s, pitch angle 15
degrees. (a) Comparison of angle of attack on the 8th element of the blade; (b) Blade tip
flapwise deflection comparison. ......................................................................................... 101
Figure 4.12. Blade crack simulation. (a) Wind speed; (b) Rotor angular acceleration
comparison; (c) Frequency component of rotor angular acceleration comparison. ............ 103
Figure 4.13. Wind shear illustration ........................................................................................... 104
Figure 4.14. Dimensionless forces for different wind shear exponent on blade 1. (a) Mean
value of individual thrust force; (b) Mean value of individual torque. ............................... 106
Figure 4.15. Comparison of thrust force distribution along radial blade length. ........................ 107
Figure 4.16. Individual blade response (blade 1) comparison with and without wind shear. (a)
Individual thrust force comparison; (b) Individual torque comparison; (c) Angle of
attack on 8th blade element; (d) Blade tip flapwise deflection. ........................................... 108
Figure 4.17. Individual blade torque and total rotor toque with wind shear m = 0.2. (a)
Individual blade torque; (b) Frequency component of individual blade torque; (c) Total
rotor torque; (d) Frequency component of total rotor torque. ............................................. 110
Figure 4.18. Rotor response comparison with and without wind shear. m = 0.2. (a) Total
rotor torque comparison; (b) Frequency component of total rotor torque comparison; (c)
Total rotor thrust comparison; (d) Frequency component of total rotor thrust
comparison; (e) Rotor speed comparison; (f) Frequency component of rotor speed
comparison. ......................................................................................................................... 112
Figure 4.19. Dimensionless forces for different wind shear exponent on blade 1. (a) Mean
rotor thrust force; (b) Mean rotor torque. ............................................................................ 113

9
Figure 5.1. Real wind speed. ....................................................................................................... 121
Figure 5.2. Estimated wind speed with different measurements. ............................................... 121
Figure 5.3. Wind speed estimation using our method. ............................................................... 122
Figure 5.4. Wind speed estimation using rotor speed. ................................................................ 122
Figure 5.5. Individual response to two impulses. ....................................................................... 123
Figure 5.6. Combined response to two impulses. ....................................................................... 123
Figure 5.7. Response using an improperly positioned two impulse shaper. ............................... 126
Figure 5.8. Repeating two incorrect two impulse shapers .......................................................... 126
Figure 5.9. Response to three impulse shaper............................................................................. 127
Figure 5.10. Input shaper for a wind turbine control system ...................................................... 130
Figure 5.11. Blade flapwise tip deflection comparison .............................................................. 130
Figure 5.12. Blade flapwise tip deflection comparison (different natural frequency) ................ 131
Figure 6.1. Wind power component with a DC generator .......................................................... 133
Figure 6.2. Individual blade response. Wind speed 15 m/s; Pitch angle 15 degrees. (a) Blade
tip flapwise deflection; (b) Individual blade torque; ........................................................... 137
Figure 6.3. Total aerodynamic torque, rotor speed and generator voltage with wind speed
15m/s, pitch angle 15 degrees. (a) Aerodynamic torque; (b) Frequency component of
aerodynamic torque; (c) Rotor speed; (d) Frequency component of rotor speed; (e)
Generator voltage in the time domain; (f) Generator voltage in the frequency domain; .... 138
Figure 6.4. Blade nodes illustration ............................................................................................ 139
Figure 6.5. Rotor and generator response. Wind speed 12m/s, pitch angle 15 degrees. (a)
Rotor speed; (b) Total aerodynamic torque; (c) Total thrust force; (d) Axial induction
number on the 8th blade element on blade 1; (e) Aerodynamic torque on individual
blades; (f) Generator voltage. ............................................................................................. 141
Figure 6.6. Rotor and generator response. Wind speed 14m/s, pitch angle 15 degrees. (a)
Rotor speed; (b) Total aerodynamic torque; (c) Total thrust force; (d) Aerodynamic
torque on individual blades; (e) Generator torque; (f) Generator voltage. ......................... 143
Figure 6.7. Rotor and generator response comparison. Wind speed 12 m/s, pitch angle 15
degrees. (a) Total aerodynamic torque comparison; (b) Rotor speed comparison; (c)

10
Generator voltage comparison; (d) Generator voltage comparison in the frequency
domain. ................................................................................................................................ 145

11
List of Symbols, Abbreviations and Nomenclature
Symbol Definition
FAST Fatigue, Aerodynamics, Structures and Turbulence
BEMT Blade element momentum theory
GDW Generalized dynamic wake
FEM Finite element method
FRF Frequency response function
IRF Impulse response function
EKF Extended Kalman filter
HAWT Horizontal axis wind turbine
NREL National renewable energy laboratory
FSI Fluid structure interaction
RMSE Root mean square error
TSR Tip speed ratio
𝜌 Air density
𝐴𝑖 Cross-sectional area at location 𝑖 𝑈𝑖 Flow velocity at location 𝑖 𝑎 Axial induction factor
𝑃𝑖 Pressure at location 𝑖 ℎ𝑖 Elevation of flow at location 𝑖 𝐹𝑇 Thrust force
𝐶𝑝 Power coefficient
𝑟𝑖 Radius of the annular ring at location 𝑖 𝑑𝑟𝑖 Radial width of the annular ring at location 𝑖 𝑑𝑇 Differential torque at the rotor disc in a unit time
𝜔𝑖 Angular velocity of the wake at station 𝑖 𝑎′ Angular induction factor
𝛺 Angular speed of the rotor
𝜃𝑇 Local twist angle
𝜃 Blade pitch angle
𝛼 Angle of attack
𝑈𝑟𝑒𝑙 Relative wind velocity
𝜃𝑖𝑛 Inflow angle
𝐹𝑙 Lift force
𝐹𝑑 Drag force
𝐹𝑛 Normal force
𝐹𝑡 Drag force
𝑉𝑜𝑝 Out of plane velocity
𝑉𝑖𝑝 In plane velocity

12
𝜃𝑃𝑇 Sum of blade twist angle and blade pitch angle
𝑐 Chord length
𝑝𝑙 Lift force per unit span
𝑝𝑑 Drag force per unit span
𝐶𝑙 Lift coefficient
𝐶𝑑 Drag coefficient
𝐶𝑛 Normal force coefficient
𝐶𝑡 Drag force coefficient
𝐵 Total number of blades
𝑅 Blade length
𝐹𝑡𝑖𝑝 Tip loss factor
𝑟ℎ Hub radius
𝐹ℎ𝑢𝑏 Hub loss factor
𝐹 Complete tip/loss factor
𝐶𝑇 Thrust coefficient
𝜎′ Local solidity
�̂�𝑖 Dimensionless induced velocity
�̂�𝑖 Dimensionless displacement
𝑈∞𝑗 Flow stream speed in generalized dynamic wake theory
𝛷 Dimensionless pressure
�̂� Dimensionless time
𝑚 Azimuthal pressure distribution mode
𝑛 Radial pressure distribution mode
𝑃𝑛𝑚 Associated Legendre function of the first kind
𝑄𝑛𝑚 Associated Legendre function of the second kind
𝐶𝑛𝑚, 𝐷𝑛
𝑚 Arbitrary coefficients to be determined
�̅� Azimuthal velocity distribution mode
𝑗 Radial induced velocity distribution mode
𝛹𝑗�̅�(�̂�) Radial shape function
()‼ Double factorial
𝛼𝑗�̅�(�̂�), 𝛽𝑗
�̅�(�̂�) Time dependent coefficients
[𝑀] apparent mass matrix
[𝐿] induced inflow influence coefficient matrix
[𝑉] flow parameter matrix
𝑉𝑇 total inflow parameter
𝑉𝑣 inflow parameter
𝜏𝑛𝑚𝑐 pressure coefficients for cosine term
𝜏𝑛𝑚𝑠 pressure coefficients for sine term
𝑁𝐵 number of blades
𝐿𝑖𝑞 thrust force acting on the ith element 𝑖 of blade 𝑞
𝑁𝐸 number of blade elements
𝜇 in-plane velocity divided by tip speed (advance ratio)
𝜒 rotor wake angle

13
𝜆𝑚 nondimensionalized momentum theory induced velocity
𝜆𝑓 nondimensionalized total inflow due to free stream wind
𝜆 total induced velocity 𝜆 = 𝜆𝑚 + 𝜆𝑓
𝜑 blade azimuth angle
𝜃 blade pitch angle
𝜃𝑡 blade twist angle
𝑟 hub radius
𝑛 index of local blade element
𝑥 distance from the start of the ith element to point P
𝑁(𝑥) shape function
𝒒𝒇 global nodal degrees of freedom in blade flapwise deflection
𝒒𝒆 global nodal degrees of freedom in blade edgewise deflection
𝜃𝑓1, 𝜃𝑓
2 nodal rotation
𝑢𝑓𝑙 (𝑥, 𝑡) local blade flapwise deflection
𝑢𝑒𝑙 (𝑥, 𝑡) local blade edgewise deflection
𝑢𝑓𝑔(𝑥, 𝑡) global blade flapwise deflection
𝑢𝑒𝑔(𝑥, 𝑡) global blade edgewise deflection
𝒗𝒑 velocity of point P
𝑇𝑏𝑛 blade kinetic energy at the element level
𝜌 blade density per unit length
𝐽ℎ Hub moment of inertia
𝑇𝒉 hub kinetic energy
𝐸𝐼𝑓 blade flapwise bending stiffness
𝐸𝐼𝑒 blade edgewise bending stiffness
𝑉𝑠𝑛 strain energy at the element level
𝑙 blade element length
𝑚 total blade elements
𝐹𝑐 centrifugal force at a specific point
𝑉𝑎𝑛 centrifugal potential energy
𝑣(𝑥, 𝑡) blade axial deflection caused by blade flapwise and edgewise
deflection
𝑔 constant acceleration due to gravity
𝑉𝑔𝑛 gravitational potential energy
𝑇 total kinetic energy
𝑉 total potential energy
𝝉 individual blade torque on a blade element
𝝉𝜮𝑗 individual blade torque for 𝑗th blade
𝑻𝒂 total aerodynamic torque
�̅� nodal force vector on a blade element
�̅�𝜮𝑗 nodal force vector for 𝑗th blade
𝑭 aerodynamic force vector (flapwise and edgewise)
𝑴𝒓𝒓 rotational mass matrix on element level

14
𝑴𝒓𝒓𝜮 rotational mass matrix for a blade
𝑴𝒓𝒓𝜮𝑗
rotational mass matrix for 𝑗th blade
𝑴𝒒𝒒 elastic mass matrix
𝑴𝒒𝒒𝜮𝑗
elastic mass matrix for 𝑗th blade
𝑴𝒓𝒒, 𝑴𝒒𝒓 coupling matrix between blade rotational and elastic d.o.f. on
blade element
𝑴𝒓𝒒𝒇 coupling between blade rotational and flapwise d.o.f. on blade
element
𝑴𝒓𝒒𝒆 coupling between blade rotational and edgewise d.o.f. on blade
element
𝑴𝒓𝒒𝜮𝑗
, 𝑴𝒒𝒓𝜮𝑗
coupling matrix between blade rotational and elastic d.o.f. for 𝑗th
blade
�̅�𝒓 stiffness matrix associated with rotational d.o.f. on a blade
element
𝑲𝑟𝜮𝑗
stiffness matrix associated with rotational d.o.f. for 𝑗th blade
𝑵𝒓 nonlinear term in blade rotational motion on a blade element
𝑵𝒓𝜮 nonlinear term in blade rotational motion for a blade
�̅�𝒓𝜮 nonlinear term in blade rotational motion for three blades
�̅� generalized stiffness matrix
�̅�𝜮𝑗 generalized stiffness matrix for 𝑗th blade
𝑵𝒒 nonlinear term in blade elastic body deformation
𝑵𝒒𝜮𝑗
nonlinear term in blade elastic body deformation for 𝑗th blade
𝑭𝒇𝒍 nodal normal forces
𝑭𝒆𝒍 nodal tangential forces
𝑪𝒒𝒒𝜮𝑗
Rayleigh damping matrix for 𝑗th blade

15
Chapter One: Introduction
1.1 Background
Thanks to the fast-developing science and technology, the current generation in the world is now
living in a society much prosperous and luxurious than ever before. Our life has been greatly
influenced by the advances in electronics and appliances, such as smartphones, computers, and
microwaves. Development in technology has resulted in a rapidly increasing energy consumption
worldwide and this trend is still being continued. The increasing rate of energy consumption is
unlikely to stop any time soon as more advanced technology is further developing. Currently, the
main sources of energy used to produce electricity are fossil fuels, which are neither renewable
nor environmentally friendly. Alternative sources of renewable energy are required to achieve a
sustainable energy supply for the future generation.
Wind energy has been considered one of the alternatives for fossil fuels. It is renewable
and has very little negative impact on the environment. Over the past decade, wind power has
grown rapidly and established its important role in providing electrical power in the world. As
shown in Fig.1.1, wind power capacity has increased more than 7 times from 2005 to 2015. In
2015, a global total capacity of 433 GW energy was produced by the wind power. According to
one estimate made by the International Energy Agency, almost half of global electricity growth
happened in wind generation during 2015 [1].
Wind turbines need to be built at wind-rich regions to make their full energy harvest
potential. Wind is stronger at sea and therefore it is beneficial to build wind turbines offshore. To
reduce the maintenance and installation cost, fewer larger wind turbines are preferred instead of
many smaller wind turbines at the seaside. By developing large wind turbines, the possibility of
obtaining more energy can be increased as the wind speed is higher at a greater height. Plus, larger

16
rotor swept area of larger wind turbine blade will increase the power output of the turbine since
the energy generated by a wind turbine is directly proportional to the inflow volume that passes
the rotor. For energy harvesting purpose, the diameter of the installed wind turbine has increased
from around 17 meters in 1980s to 126 meters in 2011 [2].
Figure 1.1. Wind Power Global Capacity and Annual Additions, 2005-2015 [1]
Although increasing the size of the wind turbine has led to a cost reduction in electricity
production, many new challenges have been created. For instance, due to the fact that the wind
speed is different in higher altitude for larger wind turbines, larger loads on the rotor-blade are
induced, and it is therefore necessary to optimize the airfoil of the blade for optimal performance
over different inflow conditions. In order to predict and determine aerodynamic loads and blade
structural responses, an integrated aeroelastic rotor-blade model that can describe the necessary
details of the wind turbine rotor system is helpful. Such a model can benefit us in the improvement
of the design, control and optimisation of wind turbine problems as well as understanding the real
system. Throughout this thesis, a wind turbine rotor-blade model for a horizontal axis wind turbine
is established and applications of the model are explored.

17
1.2 Problem Statement
As the size of wind turbine increases, it becomes necessary for control algorithms to both capture
wind energy and minimize structural fatigue. In control problems of wind turbine, an unknown
disturbance variable exists – the wind speed. Wind speed not only excites structural vibration but
also is one of the variables that determines the operating condition of the wind turbine. It can lead
to variations in parameters or varying dynamic behavior in wind turbine control. Accurate
knowledge about the effective wind speed can benefit us in improving the power generation
quality. Generally, an anemometer is mounted on the nacelle to measure the wind speed. This
measurement is known as “point wind speed” [3] and does not represent the effective wind speed
experienced by the blades. A practical way to define effective wind speed is to consider it as the
average speed over the blades that results in the same aerodynamic torque [4]. Estimation of
effective wind speed can help control the wind turbine at below and above the rated wind speed.
By knowing the effective wind speed, we can use it as the scheduling variable to design different
control algorithms.
With the increased flexibility of modern wind turbines, blades are subjected to vibrations
caused by the wind loading. In the case of lightly damped blade vibrational modes, high amplitude
vibrations can be induced [5-6]. As a result, blades may experience large deflections, which could
cause damage not only to the blade but also to other mechanical components along the drive train,
leading to a significant reduction of lifespan of the wind turbine. Excessive blade vibration could
also compromise the optimal power extraction. It is therefore essential to investigate methods of
reducing blade vibrations and study the relation between blade motion and generator response.
The latter can also help us develop methods to determine the health characteristics of blades from
generator electrical signals.

18
A dynamic model of wind turbine can play an important role in improving the design and
control of a large wind turbine for maximum extraction of wind energy. A proper model that
captures the necessary details of a system will allow the analysis and prediction of its behavior
under different loading conditions. Most of the investigations on wind turbine blade modeling
assumed that the elastic deformations do not affect the rotor system rotation [7-22]. Under this
assumption, the wind turbine blade gross motion is decoupled from its elastic deflection. However,
it is well known that wind turbine rotor experience oscillations [23]. The cause of such behavior
has not been investigated thoroughly in the literature [22]. To continue the development of an
accurate wind turbine dynamics modeling techniques, a wind turbine rotor-blade is proposed to
further investigate the interaction between aerodynamic and structural responses. Uniquely
presented in our model is the coupling terms between rotor rotation and blade deformation.
Including such detail helps us understand the phenomenon of rotor oscillation due to blade
vibration and possibly diagnose faults. Compared with the well-known FAST (Fatigue,
Aerodynamics, Structures and Turbulence) model, our model can help understand root cause
analysis in machine health monitoring solutions.
Our model is cross-validated against a model developed in the simulation software FAST.
The coupling effects are excluded during the comparison since FAST does not include these terms.
Upon a validation, the coupling terms are included to investigate the possibility of detecting blade
health condition from rotor vibrational signals. It is shown that such a coupling effect can increase
the sensitivity of methods that detect structural problems of blades. With the proposed model, we
developed a way of estimating wind speed from the rotor-blade dynamics response, which is useful
in improving the wind turbine energy harvest performance. Additionally, our model was coupled
with a generator model to investigate the relation between rotor vibration and generator behavior.

19
Those studies will help us in understanding the interaction among aerodynamic load, rotor-blade
vibration, and generator response.
1.3 Research Challenges
1.3.1 Modeling Challenges and Approach
A dynamic model of the wind turbine rotor-blade is concerned with the rotor/blade behavior in
relation to wind disturbance. The interaction among the aerodynamic, elastic and inertial forces
builds a strong connection between the aerodynamic and blade structure. As the airflow passes
through the wind turbine, the apparent wind speed around the blade introduces aerodynamic forces
on the structure. This not only results in the rotation of the wind turbine rotor but also leads to
structural vibration. Blade vibration will in turn affect the relative velocity of the air and therefore
induce different aerodynamic forces. These forces again influence the deformation and the velocity
of the airfoil. In other words, a strong two-way interaction exists between aerodynamic forces and
blade vibration. Such an fluid-structure interaction affects aerodynamic loads on the blade and
consequently the power generation, particularly for flexible wind turbine blades. Research on
bioinspired elastic wind turbine blades has shown that the flexibility of the blades affects the
energy harvest [24]. This finding emphasizes the necessity of coupling the wind conditions and
structural dynamics to predict aerodynamic loads and blade responses. An integrated aerodynamic
and structural model should be used in the aeroelastic analysis of wind turbines.
A wind turbine model can be derived from either system identification or by first principle
methods. Both methods have their strength and weakness. The system identification method can
deliver a model that captures the phenomena which manifest itself in the data. The derived model
can be useful in improving the design of control problems [25-27]. However, the capability of
predicting system behavior outside the measured data is restricted. In physical first-principles

20
modeling, the model is derived using the knowledge directly from the established laws of physics.
Such a model allows us to predict system behaviors and investigate the interrelations of model
parameters and state variables. The drawback of this model is that including the factors that
contribute to uncertainty in the system is difficult. A physical model has been built in this work to
better understand the underlying dynamics in the real system.
1.3.2 Aerodynamics Modeling
In the context of wind energy harvesting, the main objective of an aerodynamics model is to
estimate aerodynamic loads and to predict energy production. A careful aerodynamic design is
required to maximize energy extraction through maximizing the power coefficient and reduce
blade loads. It is worth noting that these objectives can be conflicting sometimes: power capture
at low wind speed can be increased with the help of increasing the twist and chord length of the
blades [28], but doing so may increase the inertial loads of the blade since it increases the blade
weight.
As pointed out in the literature [29-30], wind turbine aerodynamics are incredibly complex.
During normal operating conditions, wind turbines are subjected to wind shear, atmospheric
turbulence, and wind directional changes both in space and time. If a wind turbine is situated in a
wind farm, wake effects from neighbouring wind turbines also affect the wind field near the
turbine. Aerodynamic analysis of wind turbines requires a dynamic description of the varying
forces. Currently, this field is not well developed and many challenges exist [31]. These challenges
include, for example, how to deal with the very different length scale between the atmospheric
boundary layer on the blade surface and the blade, how to model the flow separation, and how to
couple the three-dimensional flow pattern and their dynamics to rotor blades. Extensive research
is required to fully understand these challenges to accurately predict the loads on the blades.

21
To describe the underlying flow physics of wind turbine operation during steady wind
speed condition, we used the blade element momentum theory (BEMT), which is one of the most
popular and commonly used model [32-38]. In BEMT, the rotor plane of the wind turbine blade is
divided into several annular elements that are analyzed individually while ignoring their
interactions. At each element, BEMT equates the force to the momentum change of the air passing
through the annulus. Thus, the axial induction factor can be obtained, which is customarily defined
as the fractional decrease in wind velocity between the free stream and the rotor plane [32-33].
The numerical calculation of the axial induction factor is obtained through an iterative routine with
a solution not always guaranteed. A convergence problem arises under non-typical flow
conditions, such as extreme wind inflow speed or wind turbine start-up. BEMT assumes no
interaction between adjacent elements. When this assumption is not valid in element regions where
momentum is transferred via unsteady vortices, the numerical solution procedure will break down.
A robust numerical algorithm needs to be applied to BEMT to obtain solutions during such
operating conditions [39-40]. In addition to the convergence problem, BEMT does not include tip
loss and hub loss and becomes invalid when the induction factor is greater than 0.4. To account
for these deficiencies, many corrections are added to BEMT [32-33].
During unsteady wind speed, it takes time for the airflow passing through the blade to
adjust to a changing flow condition. BEMT treats switching from one flow condition to another
instantaneous and assumes the airflow field around the airfoil is always in equilibrium [33].
Additionally, the spanwise flow is ignored in BEMT [28], which implies that there is no radial
flow interaction between adjacent blade elements. The theory becomes less accurate when large
spanwise pressure variation takes place. To capture the time dependent flow and describe a more
general distribution of pressure, we used generalized dynamic wake (GDW) theory [33, 41]. This

22
theory accounts for turbulence and spatial variation of the inflow. However, the assumption that
the induced velocities are small relative to the mean flow might lead to instability problems for
highly loaded rotors. Also, wake rotation is not included in the GDW theory. One way to deal with
this challenge is to switch to BEMT when instability problems happen and to calculate induced
velocity in the tangential direction [33].
1.3.3 Structural Dynamics Modeling
Including the necessary details that affect the blade structural response is necessary in improving
the model accuracy when analyzing aeroelastic behavior. One such factor that is ignored in most
of the literature is the coupling effects between the blade gross motion and elastic deformation [7-
22]. The coupling terms affect the fluid-structure interaction, and are important for understanding
the torsional vibration of the rotor system due to possible blade faults. Another important term in
structural modeling is the centrifugal force. The literature has shown that the centrifugal forces
affect the stiffness when a beam is rotating and can change the natural frequencies [20, 42]. For
most wind turbines, the blade is designed with twist angle along the blade length to improve its
energy capturing efficiency. The twist angle is a static feature of the blade and can result in
different aerodynamic loads. Blade torsion is generally ignored since wind turbine blade is
relatively stiffer in this direction [32]. These factors should be included in the model to predict
structural response more accurately.
Wind turbine blade is usually considered as a rotating cantilever beam. The most popular
types of beam models are the Euler Bernoulli beam and Timoshenko beam. The difference between
these two beams is that the former considers only lateral displacement while the latter also accounts
for the rotary inertia and shear deformation. The Euler Bernoulli beam theory assumes that the
cross-section of the beam is rigid and does not take account of shear deformation. The shear

23
deformation may change the shape of the blade airfoil, which will alter the lift and drag coefficients
of the blade element. The Euler Bernoulli beam becomes less accurate in predicting the aeroelastic
response of the wind turbine when shear deformation plays an important role in determining the
structural response. However, it has been pointed out in the literature that the vibration modes of
these two beams are almost identical for long and slender beams [43]. For wind turbine blades,
which usually have a thin and slender structure, the Euler Bernoulli beam model shows little
difference from the Timoshenko beam model [44]. For this reason, we consider wind turbine
blades as Euler Bernoulli beams since their lengths are generally much larger than cross sectional
dimensions. The Euler Bernoulli beam model has been used by many structural models in both the
aeroelastic modeling [45-46] and the dynamic analysis [12-14] of wind turbine blades.
Once the final dynamics model is obtained, discretization is often involved in converting
the partial differential equations into ordinary differential ones to solve the blade motion governing
equations. The assumed mode method discretizes the blade deflection according to natural
vibration modes. At any given time, each natural mode contributes to the blade deflection through
a time dependent weighting coefficient called the generalized coordinate. The challenge is that it
is difficult to integrate the structural model with the aerodynamic model. The reason is that this
method is continuous in space while the aerodynamic loads from blade element momentum based
methods are distributed and discontinuous on the blade length dimension. On the other hand, the
finite element method discretizes the blade deflection along the blade length dimension. A blade
is composed of interconnected finite number of elements. As such, aerodynamic loads along the
blade can be easily embedded in the blade deflection model. Also, the interaction between
aerodynamic loads and blade vibration can be included in the aeroelastic analysis. Therefore, the
finite element model is more accurate in capturing the two-way fluid structure interaction. Such

24
advantages can be useful in the situation where coupling between aerodynamics and structure
becomes important. However, the large matrices involved in the FEM calculation make the model
computational expensive. Depending on the purpose of the modeling, different discretization
methods should be adopted to solve the equations.
1.4 Review of Previous Work
1.4.1 Literature Review on Wind Turbine Blade Modelling
Numerous studies on modeling the wind turbine blade dynamics can be found in the literature. In
the late 1970s, wind turbine blades were treated as rotating rigid bodies, hinged to a hub [7]. The
same approach was used in helicopter blade models [8]. This approach is valid in the study of early
wind turbine blades because of their smaller sizes. With the increase in turbine sizes for increased
power production, blade vibration becomes more significant. Baumgart [9] developed a flexible
blade model based on the principle of virtual work in which warping, longitudinal motion, and tilt
effects are considered. The model is suitable for static deformation analysis. Inspired by the work
of Hodge and Dowell on helicopter blade modeling [10], Kallesøe introduced an analytical model
that extended Dowell’s blade model [11] and included the effects of gravity, pitch action, and
varying rotor speed. Around the same time, Larsen published an analytical blade model based on
the Euler Bernoulli beam theory [12-14]. The model was shown to be useful in structural nonlinear
dynamics analysis. To consider the shear deformation and rotary inertia effects, Otero used the
Timoshenko beam theory to model the blade [15]. Since 2010, with the realization that wind
turbine blade vibration presents itself in two different directions with very distinct characteristics,
it has become increasingly common to model the flapwise and edgewise deflections separately
[16-21]. Blades have been widely considered as Euler Bernoulli beams, and the assumed mode
method is used for beam discretization. Distinct from the other works, Li and Li considered both

25
the blade structure and the aerodynamic loading [22]. Li and Li’s paper was one of the few that
considered fluid-structure interaction in wind turbine blade modeling. They developed an
analytical model to investigate the static deformation, aeroelastic stability and dynamics of the
blade.
Most of the blade modeling papers focused on the structural dynamics only while ignoring
the aerodynamics. The reason is that the early studies were mostly dedicated to static analyses.
However, with the desire for more effective wind power extraction and long machine service life,
understanding the wind flow and its interaction with the turbine system becomes very important.
Given the fact that an interaction exists between the aerodynamic loads and blade vibration,
developing an integrated aerodynamic and structural model is necessary to accurately predict the
aeroelastic behavior of wind turbines.
1.4.2 Effective Wind Speed Estimation
Estimating wind speed is useful in improving the wind turbine control performance in energy
extraction, and many methods have been developed. In Refs. 47 and 48 [47-48], the wind speed is
estimated based on a polynomial method. The power output is expressed as a polynomial function
and wind speed is determined by solving the equation inversely. In addition to polynomial based
estimation, many different types of machine learning-based estimation have been used to estimate
wind speed [49-55], including neural network, support vector machine, and extreme learning
machine. These methods may differ in algorithms; however, the basic idea behind them are similar:
they are trying to solve the problem by training the “models” inversely. After obtaining the wind
turbine characteristic by using machine learning based algorithms, the wind speed is estimated
from the known information, such as rotor speed, power output, and pitch angle. Apart from the
above-mentioned methods, many different types of observers have been proposed to solve the

26
problem [56-58]. In these model-based observer design techniques, the aerodynamic torque was
considered as an augmented state in a state space model. After obtaining the value of the
aerodynamic torque from the designed observer, the effective wind speed is reconstructed from
aerodynamic torque through a root finding algorithm.
The existing works on wind speed estimation are based on power or rotor speed
measurements. Those methods provide a way of reconstructing the wind input but ignore the rich
information contained in the blade vibration. Inspired by the fact that the wind drives both the
rotation of the rotor and the vibration of the blade, we proposed a way of identifying wind speed
by adding blade deflection in the measurement. We hope to see an improved accuracy in wind
speed estimation by including an additional measurement. An accurate knowledge of effective
wind speed is useful in increasing power harvest of wind turbines.
Researchers from GE company has developed a method of obtaining blade deflection
using MEMS gyroscope sensors [59]. They proposed a way of calculating blade tip deflection
from angular rate measurements. The sensor was validated by field test in a 1.6 MW wind turbine
(3-blade wind turbine) with 100-meters diameter. Since deflections on three blades are different
in real time, a sensor was installed on each blade in the location of 20 meters from the blade root.
Those sensors were connected to the data acquisition system by wires. The accuracy of this method
was evaluated by comparing with the measurement from a laser sensor installed on the tower
(accuracy around 1 cm [59]). The laser sensor can provide reference signal for comparison when
the blade is in parallel with the tower and is pointing down. It was shown that the proposed method
can provide an accuracy of 5% in the blade tip deflection measurement. Compared with the laser
measurement, the MEMS gyroscope sensor can provide continuous measurement of blade
deflection in real time.

27
1.4.3 Blade Vibration Reduction
The two main modes of vibration for wind turbine blades are flapwise and edgewise [5-6]. Many
studies have been carried out to reduce the vibrations. To reduce edgewise vibration, Staino and
Basu proposed a new hardware configuration with actuators or active tendons mounted inside the
blade structure [18, 21]. By applying the forces from the actuators with appropriate control
algorithms, the vibrations in the edgewise direction can be reduced. Basu also developed a new
way of using a circular liquid column damper to suppress edgewise vibrations [60]. The
performance of the liquid damper was evaluated by applying it to models with different
complexities. The damper can effectively reduce the vibration modes of the blade in edgewise
direction. The possibility of using semi-active tuned mass dampers to reduce vibrations in flapwise
direction was investigated in the literature [16]. To show the feasibility of the strategy, the paper
simulates the situation where parameter variations occur. In addition to dampers, there are works
dedicated to the use of trailing edge flaps [61] and synthetic jet actuator [62] to suppress blade
flapwise vibrations. The idea is to change the flow conditions around the blade airfoil to reduce
the aerodynamic loads on the blade, thus mitigating blade vibrations. In general, the blade vibration
is reduced by adding new hardware to the blade structure.
None of the studies above explores the effect of fast pitch rates on blade vibrations. Fast
pitch commands can excite vibrational modes of the system. The induced vibrations are harmful
to the blade and could reduce the machine lifespan. Mitigating blade vibrations caused by the pitch
commands is therefore necessary for increasing turbine machine life. The blade airfoil undergoes
pitching movement exhibits a stalling behavior [63]. Such a behavior is different from that when
the flow separates over an airfoil at a fixed angle of attack and can be referred to as dynamic stall
[33]. Dynamic stall is an unsteady aerodynamic effect that happens when the airfoil experiences

28
rapid or transient motion which quickly changes the angle of attack [44]. When such a phenomenon
happens, the lift and drag coefficients can be different from the 2D static values [28]. This could
result in different loads on the blade and thus different blade vibrations. Snel and Schepers
analyzed the response of horizontal axis wind turbines undergoing a change in pitch angle [64].
They used different dynamic inflow models for a wind turbine rotor model and compared results
with the wind tunnel measurements. Without considering dynamic stall, they showed that their
model can generate qualitatively good results in predicting aerodynamic loads. Hammam [65]
investigated the behavior of blade subjected to fast pitching. He showed that the thrust coefficient
from the model without dynamic stall matches the experiments very well when the tip speed ratio
(ratio between blade tip speed and wind speed) is high. In our work, we use our model to
demonstrate the effect of fast pitch command on blade vibration without including dynamic stall
at a high tip speed ratio.
1.5 Organization of the Thesis
Chapter 1: Introduction
A brief overview of research problems is given along with the major challenges involved to address
them. A literature review of the approaches to solving the problem is also presented.
Chapter 2: Aerodynamic Modeling
The aerodynamics of the wind turbine are modeled using both the blade element momentum theory
and generalized dynamic wake theory. The former has more wide applications while the latter
allows for a more general wind pressure distribution over the rotor disk.
Chapter 3: Structural Dynamics Modeling

29
The mathematical model of the blade structure is developed using first principle method. The blade
is modeled as the Euler Bernoulli beam elements with varying material properties. The blade is
discretized by using both the finite element method and the assumed mode method.
Chapter 4: Model Validation and Analysis
The developed model is validated by comparing with FAST, which is a widely used software for
wind turbine simulation. The significance of different terms such as coupling terms, fluid-structure
interaction, centrifugal forces, and gravity forces are presented. Effects of wind shear on rotor
blade response are analyzed as well.
Chapter 5: Wind Speed Estimation and Input Shaping
Applications of the model discretized by the assumed mode method are given in this chapter. An
observer is designed to estimate wind speed and an input shaper is designed to reduced blade
vibration.
Chapter 6: Blade Motion and Generator Response
A generator model is developed and coupled to the rotor blade model to investigate the relation
between the blade motion and the behavior of the generator. It is shown that generator electrical
signals can be used to extract blade health characteristics.
Chapter 7: Conclusions
General conclusions of the research work are discussed in this chapter together with
recommendations for future work.

30
Chapter Two: Horizontal Wind Turbine Aerodynamics
Wind turbines extract the kinetic energy of the wind and convert it into electrical energy. As such,
the more energy is extracted from the wind, the slower the wind speed after passing through the
wind turbine. The amount of the energy captured by the turbine depends on the momentum loss.
A good wind turbine design and operation will allow more efficient wind energy extraction with
long service life. Optimization of aerodynamics is the starting point of the wind turbine design and
is useful in maximizing power production. Being able to describe the interaction between the wind
and the turbine structure is the key to an accurate modeling of turbine aeroelastic behavior.
Therefore, this chapter is dedicated to the understanding of various aerodynamics models which
will help us properly model the fluid-structure interaction. Two aerodynamics modeling theories
are presented here to determine aerodynamic loads, namely, blade element momentum theory and
generalized dynamic wake theory. Both methods combine the conservation of mass and
momentum in conjunction with blade element theory to predict aerodynamic loads. The difference
is that the latter allows for a more general pressure distribution over the rotor disk and can predict
the transient behavior of the unsteady flow more accurately. Brief introductions about these two
theories are presented in this chapter.
2.1 Blade Element Momentum Method
The blade element momentum theory (BEMT) is probably described in all articles and books that
deal with aerodynamics, both in wind turbines and helicopters [32, 36, 66-68]. Due to its relative
simplicity and reasonable results, it is still widely used in most wind turbine aeroelastic codes.
BEMT is an extension of the actuator disc theory that combines momentum and blade element
theories to predict turbine’s aerodynamic loads [30]. The momentum theory determines the wind
loads based on the momentum and mass conservation, while the blade element method calculates

31
the aerodynamic forces by considering the blade structural design and airflow condition around
the airfoil. BEMT is explained in more detail in the subsequent sections.
2.1.1 Actuator Disc Concept
To understanding the physics involved in wind turbine aerodynamics, we begin an analysis by
introducing the one-dimensional actuator disc model. Such a simplified model is a prerequisite in
determining the wind momentum loss. In this model, the rotor is represented by an actuator disc,
through which the pressure discontinuity happens. A physical scenario of the actuator disc would
be a rotor with an infinite number of very thin, dragless blades. An energy extracting actuator disc
and flow tube are shown in Fig. 2.1. At this point, no specific turbine design is concerned and wind
is assumed to be homogeneous, steady, and one dimensional.
1 2 3 4
1U 2U3U
4U
Figure 2.1. Control volume for the actuator disc model
The mass of air that passes through a given cross section area of the stream tube in a unit time is
𝜌𝐴𝑈, where 𝜌 is the air density, 𝐴 is the cross-sectional area and 𝑈 is the flow velocity. Applying
the conservation of mass to the control volume results in [30, 32]:
𝜌𝑈1𝐴1 = 𝜌𝑈2𝐴2 = 𝜌𝑈4𝐴4 (2.1)

32
In the above, subscript 𝑖 denotes the cross-section location. Location 1 refers to the far upstream,
location 2 is where the disc situates and location 4 refers to the far wake. 𝐴2 and 𝐴3 both represent
the cross-sectional area at rotor disc and are equal. Because turbine extracts kinetic energy from
the wind, the air within the control volume slows down as air passes through the rotor disc.
Therefore, the wind speed at location 4, 𝑈4, is slower than the speed at location 1, 𝑈1. According
to Eq. (2.1), the cross-sectional area of the control volume must expand to accommodate the slower
moving air.
The actuator disc induces a velocity variation as the rotor extracts energy from wind. The
relative decrease of the wind speed after passing through the rotor plane is quantified as the axial
induction factor [30]
𝑎 =
𝑈1 − 𝑈2𝑈1
(2.2)
Eq. (2.2) can also be written as
𝑈2 = 𝑈1(1 − 𝑎) (2.3)
Ideally, one would wish to construct a wind turbine with an induction factor of 1, meaning all the
energy from the wind has been extracted. However, a simple derivation in the later section will
show that this is impossible. The axial induction factor plays an important role in the determination
of induced wind velocity on the blade airfoil and consequently the angle of attack. Those
parameters are essential to calculate aerodynamic loads. The disc actuator concept described in
this section provides us a way of calculating wind momentum loss in the axial direction.
2.1.2 Axial Momentum Theory
The air that passes through the rotor disc undergoes a rate of change of momentum. This is caused
by the pressure difference across the actuator disc [30],

33
(𝑃2 − 𝑃3)𝐴2 = (𝑈1 − 𝑈4)𝜌𝐴2𝑈1(1 − 𝑎) (2.4)
where 𝑃𝑖 represents the pressure at location 𝑖. To determine the pressure difference (𝑃2 − 𝑃3),
Bernoulli’s equations is applied to the upstream and downstream sections of the stream tube
separately. Bernoulli’s equations state that the total energy in the flow remains constant provided
no work is done on or by the fluid. Apply this to the upstream of the stream tube yields [30],
1
2𝜌𝑈1
2 + 𝑃1 + 𝜌𝑔ℎ1 =1
2𝜌𝑈2
2 + 𝑃2 + 𝜌𝑔ℎ2 (2.5)
where ℎ1 is the elevation of flow at location 𝑖. Assuming the flow is horizontal, then ℎ1 equals to
ℎ2, Eq. (2.5) then becomes
1
2𝜌𝑈1
2 + 𝑃1 =1
2𝜌𝑈2
2 + 𝑃2 (2.6)
Similarly, equation for the downstream flow can be expressed as [30]
1
2𝜌𝑈4
2 + 𝑃4 =1
2𝜌𝑈3
2 + 𝑃3 (2.7)
Subtracting Eq. (2.6) by Eq. (2.7) we obtain
𝑃2 − 𝑃3 =
1
2𝜌(𝑈1
2 − 𝑈42) (2.8)
Notice that the above equation assumes pressure at the far upstream 𝑃1 and far downstream 𝑃4 are
equal. Substitute Eq. (2.8) into Eq. (2.4) gives
1
2𝜌𝐴2(𝑈1
2 − 𝑈42) = (𝑈1 − 𝑈4)𝜌𝐴2𝑈1(1 − 𝑎) (2.9)
which can be further simplified to yield
𝑈4 = 𝑈1(1 − 2𝑎) (2.10)
Eq. (2.10) shows that as 𝑎 increases from zero, the downwind flow speed decreases until 𝑎 = 1 2⁄ .
The momentum theory is no longer valid beyond this value in wind turbine applications.

34
The thrust force 𝐹𝑇 across the rotor disc can be obtained by combining Eqs. (2.4) and (2.10)
[30],
𝐹𝑇 = (𝑃2 − 𝑃3)𝐴2 = 2𝜌𝐴2𝑈12𝑎(1 − 𝑎) (2.11)
The power extracted from the wind is obtained by multiplying the thrust force with the wind
velocity [30]
𝑃𝑜𝑤𝑒𝑟 = 𝐹𝑇𝑈2 = 2𝜌𝐴2𝑈13𝑎(1 − 𝑎)2 (2.12)
A power coefficient 𝐶𝑝 can be defined as the power extracted from the wind divided by the power
available in the wind [30, 32]
𝐶𝑝 =
𝑃𝑜𝑤𝑒𝑟
12𝜌𝑈1
3𝐴2
= 4𝑎(1 − 𝑎)2 (2.13)
The value of the induction factor which maximizes the power is given by the following equation
[30, 36]
𝑑𝐶𝑝
𝑑𝑎= 4𝑎(1 − 𝑎)(1 − 3𝑎) = 0 (2.14)
which gives the value of 𝑎 =1
3. Then maximum power coefficient is
𝐶𝑝 =
16
27= 0.593 (2.15)
The maximum achievable power coefficient limit is known as the Betz limit. This limit is not
related to any specific design of the wind turbine. The Betz limit is calculated by considering the
wind flow in the axial direction only while ignoring the wake rotation.
2.1.3 Angular Momentum Theory
In the previous one-dimensional actuator disc model, rotation of the wake caused by the spinning
rotor is not considered. The exertion of a torque on the turbine disc by the air requires an opposite
and equal torque from the rotor. As a result, the flow behind the rotor will rotate in a direction

35
opposite to that of the turbine. Because the rotating wake exhibits kinetic energy, the amount of
the available power that can be extracted from the wind is further reduced.
The presence of the rotor disc introduces an axial component and a velocity component in
the direction that is tangential to the rotation. These velocity components take different magnitude
at different distance from the center of the disk. In order to quantify the variations of induced
velocity components, we divide the rotor disc into annular rings as shown in Fig. 2.2 and consider
one of them to explain the angular momentum theory.
The differential area of an annular ring at location 𝑖 can be written as
𝑑𝐴𝑖 = 2𝜋𝑟𝑖𝑑𝑟𝑖 (2.16)
where 𝑟𝑖 and 𝑑𝑟𝑖 are the radius and radial width of the annular ring at location 𝑖 respectively.
Location 𝑖 follows the streamline of axial flow. The conservation of mass is not affected by wake
rotation and can be expressed as follow [30]
𝑈12𝜋𝑟1𝑑𝑟1 = 𝑈32𝜋𝑟3𝑑𝑟3 = 𝑈42𝜋𝑟4𝑑𝑟4 (2.17)
1 2 3 4
r
dr
Figure 2.2. Annular stream tube control volumes

36
The differential torque at the rotor disc in a unit time, 𝑑𝑇, can be calculated from the rate of change
of angular momentum of the air passing through the ring [30],
𝑑𝑇 = 𝜌𝜔4𝑟42𝑈42𝜋𝑟4𝑑𝑟4 (2.18)
where 𝜔4 is the angular velocity of the wake at station 4 and 𝜌 is the air density.
Angular momentum between locations 3 and 4 should be equal, thus the following equation
can be obtained [30]
𝜔3𝑟32 = 𝜔4𝑟4
2 (2.19)
where 𝜔3 is the angular velocity of wake at the rotor disc and 𝑟3 is the radius at rotor disc. Since
the downwind radius of the control volume is larger than the radius at the rotor plane, the angular
speed of the wake far downstream of the rotor is lower according to Eq. (2.19).
Combining Eqs. (2.17-2.19), the differential rotor torque can be expressed as [30]
𝑑𝑇 = 𝜌𝜔3𝑟32𝑈32𝜋𝑟3𝑑𝑟3 (2.20)
Eq. (2.20) indicates that as the rotor torque increases, the angular velocity of wake increases as
well.
An angular induction factor, 𝑎′, can be defined as [30]
𝑎′ =𝜔32𝛺
(2.21)
where 𝛺 is the angular speed of the rotor. With this definition and the axial induction factor defined
in Eq. (2.2), the differential rotor torque can be written in terms of the two induction factors, 𝑎 and
𝑎′ [30]:
𝑑𝑇 = 𝜌𝑈1𝛺𝑟24𝑎′(1 − 𝑎)𝜋𝑟𝑑𝑟 (2.22)
Substitute Eq. (2.16) into Eq. (2.11), we can obtain the expression for thrust force [30]
𝑑𝐹𝑇 = 𝜌𝑈124𝑎(1 − 𝑎)𝜋𝑟𝑑𝑟 (2.23)

37
For convenience, we used 𝑟 instead of 𝑟2 to represent the radius of annular ring in Eqs. (2.22-2.23).
The same symbol will be used hereafter. These two equations determine the differential thrust
force 𝑑𝐹𝑇 and torque 𝑑𝑇 in momentum theory. They are combined with the forces obtained from
blade element theory, which are introduced in the next section, to predict axial induction factors.
2.1.4 Blade Element Theory
In sections 2.1.2 and 2.1.3, flow forces on the wind turbine rotor plane are determined by applying
the principles of momentum and mass conservation on annular volumes. This type of method is
generally referred to as momentum theory in the literature [30, 32, 36]. However, unless we assume
a value for axial induction factor, there are not enough equations to solve for rotor thrust force and
torque by using Eqs. (2.22) and (2.23). Additional equations are required to calculate aerodynamic
forces that are associated with the thrust force and torque.
The state of flow around the rotor blade is affected by the built-in characteristics of the
blade structure, such as twist distribution and airfoil shape. The method that uses blade geometry
properties to determine the aerodynamic forces is referred to as blade element theory. In this
theory, a blade is divided into a number of distinct elements, each of length 𝑑𝑟. At each element,
aerodynamic forces are calculated from the local flow stream and blade geometry properties. The
interaction between two adjacent blade elements is not included in the blade element theory. The
forces on the blade elements are determined by the 2D lift and drag characteristics of the blade
cross section airfoil shape and their orientation relative to the incoming flow. The lift and drag
coefficients are required when determining the aerodynamic forces. Those coefficients are based
on the two-dimensional properties of the local airfoil aerodynamics and depend on Reynolds
number as well as angle of attack. The lift and drag coefficients for 1.5 MW baseline wind turbine
on different blade elements are provided in Appendix C.

38
In the blade element theory, the force and torque can be found by analyzing the geometry
of Fig. 2.3. In this figure, 𝜃𝑇 is the blade twist angle and 𝜃 is the blade pitch angle measured
relative to the point of zero twists. The twist angle varies along the length of the blade and is a
static feature of the blade design. The blade pitch angle is constant across the entire length of the
blade and can be adjusted for different operating conditions. The angle of attack, 𝛼, is defined as
the angle between the relative wind speed 𝑈𝑟𝑒𝑙 and chord line of the airfoil. The inflow angle 𝜃𝑖𝑛
is the sum of 𝜃𝑇, 𝜃, and 𝛼. On an airfoil, the resultant forces are usually resolved into two
components: the component normal to the incoming flow is known as the lift force 𝐹𝑙 and the
component parallel to the incoming flow stream is known as the drag force 𝐹𝑑. These forces can
also be decomposed into normal and tangential components with respect to the chord line. The
normal force 𝐹𝑛 is perpendicular to the chord line while the tangential force 𝐹𝑡 is parallel to the
chord line. For a specific flow condition, Lift/drag forces are related to normal/tangential forces
through the angle of attack.

39
Chord line
relU
T
'(1 )r a ipV
opV
in
PT
lFdF
nF
tF
Figure 2.3. Blade element geometry
The relative wind velocity, 𝑈𝑟𝑒𝑙, is the vector sum of the axial inflow velocity and the tangential
inflow velocity. When blade vibration is small, angle of attack is not affected by blade vibration,
and the relative wind velocity can be calculated by [30, 33]
𝑈𝑟𝑒𝑙 = √[𝑈1(1 − 𝑎)]2 + [𝛺𝑟(1 + 𝑎′)]2 (2.24)
And local inflow angle can be determined by
𝑡𝑎𝑛𝜃𝑖𝑛 =
𝑈1(1 − 𝑎)
𝛺𝑟(1 + 𝑎′) (2.25)
If the blade deflection is significant, then local velocities caused by blade vibration need to be
included in the calculation of inflow angle as follows [33]:
𝑡𝑎𝑛𝜃𝑖𝑛 =
𝑈1(1 − 𝑎) + 𝑉𝑜𝑝
𝛺𝑟(1 + 𝑎′) + 𝑉𝑖𝑝 (2.26)

40
where 𝑉𝑜𝑝, 𝑉𝑖𝑝 are out of plane and in plane velocity in a local blade element respectively. The
plane refers to the rotating plane of the blades. By adopting Eq. (2.26), the interaction between the
wind flow and structure is included in the aerodynamic load calculation. Inclusion of such terms
can provide a way of understanding the aeroelastic behavior of wind turbines.
The relationship between the resultant forces are [30]:
𝑑𝐹𝑇 = 𝐹𝑙𝑐𝑜𝑠𝜃𝑖𝑛 + 𝐹𝑑𝑠𝑖𝑛𝜃𝑖𝑛 (2.27)
𝑑𝑇 = 𝑟[𝐹𝑙𝑠𝑖𝑛𝜃𝑖𝑛 − 𝐹𝑑𝑐𝑜𝑠𝜃𝑖𝑛] (2.28)
Or equivalently,
𝑑𝐹𝑇 = 𝐹𝑛𝑐𝑜𝑠𝜃𝑃𝑇 − 𝐹𝑡𝑠𝑖𝑛𝜃𝑃𝑇 (2.29)
𝑑𝑇 = 𝑟[𝐹𝑛𝑠𝑖𝑛𝜃𝑃𝑇 + 𝐹𝑡𝑐𝑜𝑠𝜃𝑃𝑇] (2.30)
where 𝜃𝑃𝑇 is the sum of blade twist angle and blade pitch angle.
The forces are normally characterized by dimensionless coefficients. The lift and drag
coefficients, 𝐶𝑙 and 𝐶𝑑, can be defined as [30]
𝐶𝑙 =𝑝𝑙
12 𝜌𝑈𝑟𝑒𝑙
2 𝑐
(2.31)
𝐶𝑑 =𝑝𝑑
12 𝜌𝑈𝑟𝑒𝑙
2 𝑐
(2.32)
where 𝑐 is the chord length, 𝑝𝑙, 𝑝𝑑 represent the lift and drag forces per unit span.
The dimensionless normal and tangential forces coefficients, 𝐶𝑛 and 𝐶𝑡, are defined in a
similar way [30]:
𝐶𝑛 =
𝑁𝑜𝑟𝑚𝑎𝑙 𝐹𝑜𝑟𝑐𝑒 𝑈𝑛𝑖𝑡 𝑆𝑝𝑎𝑛⁄
12 𝜌𝑈𝑟𝑒𝑙
2 𝑐 (2.33)

41
𝐶𝑡 =
𝑇𝑎𝑛𝑔𝑒𝑛𝑡𝑖𝑎𝑙 𝐹𝑜𝑟𝑐𝑒 𝑈𝑛𝑖𝑡 𝑆𝑝𝑎𝑛⁄
12 𝜌𝑈𝑟𝑒𝑙
2 𝑐 (2.34)
Using Eqs. (2.31-2.34), the total differential thrust force and torque can be written in terms of the
dimensionless coefficients as [30]
𝑑𝐹𝑇 = 𝐵
1
2𝜌𝑈𝑟𝑒𝑙
2 𝑐[𝐶𝑙𝑐𝑜𝑠𝜃𝑖𝑛 + 𝐶𝑑𝑠𝑖𝑛𝜃𝑖𝑛]𝑑𝑟 (2.35)
𝑑𝑇 = 𝐵
1
2𝜌𝑈𝑟𝑒𝑙
2 𝑐𝑟[𝐶𝑙𝑠𝑖𝑛𝜃𝑖𝑛 − 𝐶𝑑𝑐𝑜𝑠𝜃𝑖𝑛]𝑑𝑟 (2.36)
𝑑𝐹𝑇 = 𝐵
1
2𝜌𝑈𝑟𝑒𝑙
2 𝑐[𝐶𝑛𝑐𝑜𝑠𝜃𝑃𝑇 − 𝐶𝑡𝑠𝑖𝑛𝜃𝑃𝑇]𝑑𝑟 (2.37)
𝑑𝑇 = 𝐵
1
2𝜌𝑈𝑟𝑒𝑙
2 𝑐𝑟[𝐶𝑛𝑠𝑖𝑛𝜃𝑖𝑛 + 𝐶𝑡𝑐𝑜𝑠𝜃𝑖𝑛]𝑑𝑟 (2.38)
where 𝐵 is the total number of blades. The overall turbine thrust and torque parameters are
calculated by integrating the Eqs. (2.35-2.36) or Eqs. (2.37-2.38) along the turbine span. By
equating the forces obtained from blade element theory and momentum theory, the axial induction
factor can be determined. However, the obtained induction factor is only valid under the
assumptions that the rotor plane can be treated as a disc and the wind speed is homogeneous and
steady. Corrections are required to account for those assumptions.
2.1.5 Tip Loss and Hub Loss
One of the assumptions in BEMT is that there are infinite number of blades in the rotor disc. The
theory in the previous section assumes that the velocities and pressure distribution are uniform in
the circumferential direction. Since non-uniformities must arise for a finite number of blades, the
momentum equations need to be adjusted with corrections. The most common corrections used is
the tip loss factor developed by Prandtl [33]:

42
𝐹𝑡𝑖𝑝 =
2
𝜋𝑐𝑜𝑠−1(𝑒
−𝐵2
(𝑅−𝑟)𝑟(𝑠𝑖𝑛𝜃𝑖𝑛)) (2.39)
where 𝑅 is the blade length. 𝐹𝑡𝑖𝑝 accounts for the vortices shed from the blade tips and can be
compared with thrust force coefficient to determine the induction factor.
The hub loss factor is used to correct the vortex being shed from the hub of the rotor.
Similar to tip loss model, the hub loss model can be expressed as [33]
𝐹ℎ𝑢𝑏 =
2
𝜋𝑐𝑜𝑠−1(𝑒
−𝐵2∙𝑟−𝑟ℎ𝑟𝑠𝑖𝑛𝜃𝑖𝑛) (2.40)
where 𝑟ℎ is the hub radius. 𝐹ℎ𝑢𝑏 corrects the induced wind velocity resulting from a vortex being
shed near the rotor hub.
The complete tip/loss factor can be obtained by multiplying the tip loss factor with the hub
loss factor [33]
𝐹 = 𝐹𝑡𝑖𝑝𝐹ℎ𝑢𝑏 (2.41)
Eq. (2.41) will be used to compare with the thrust coefficient derived later to determine the axial
induction factor [33].
2.1.6 Glauert Correction
The simple momentum theory becomes invalid when the axial induction factor is greater than
about 0.4. This happens because rotor enters a region known as the turbulent wake state if axial
induction number approaches 0.5. According to Eq. (2.10), this operating state results in the flow
in the far wake to propagate upstream and violates the static flow assumptions in BEMT. To
compensate for the error, Glauert has developed a correction by using experimental data from
helicopter rotors [63]. The model was originally developed to correct thrust coefficient of the entire
rotor, and it has been used to correct local thrust coefficients when applied to BEMT. For each
blade element, Glauert corrections are used in conjunction with the tip loss model to determine the

43
total induced velocity. These corrections experiences numerical discontinuities when the wind
flow condition changes from windmill state to the turbulent windmill state. To account for that,
Buhl derived a modification that extends the Glauert empirical correction in calculating thrust
force coefficient [33]:
𝐶𝑇 =
8
9+ (4𝐹 −
40
9)𝑎 + (
50
9− 4𝐹)𝑎2 (2.42)
The axial induction number can be obtained by solving Eq. (2.42)
𝑎 =
18𝐹 − 20 − 3√𝐶𝑇(50 − 36𝐹) + 12𝐹(3𝐹 − 4)
36𝐹 − 50 (2.43)
Including Glauert correction in the BEMT is essential to eliminate a numerical instability problem
[33]. So far, the basic equations and necessary parameters are defined. We will next explain blade
element momentum theory.
2.1.7 Blade Element Momentum Theory
BEMT combines the blade element theory and momentum theory. Induction factors can be found
through equating the forces derived from the two theories. By equating 𝑑𝐹𝑇 and 𝑑𝑇 in Eqs. (2.22),
(2.23), (2.35) and (2.36), and considering the total tip/loss factor, we can have the expressions for
axial and tangential induction factor as follows [33]:
𝑎 = [1 +
4𝐹𝑠𝑖𝑛2(𝜃𝑖𝑛)
𝜎′(𝐶𝐿𝑐𝑜𝑠𝜃𝑖𝑛 + 𝐶𝐷𝑠𝑖𝑛𝜃𝑖𝑛)]−1 (2.44)
𝑎′ = [−1 +
4𝐹𝑠𝑖𝑛𝜃𝑖𝑛𝑐𝑜𝑠𝜃𝑖𝑛𝜎′(𝐶𝐿𝑠𝑖𝑛𝜃𝑖𝑛 − 𝐶𝐷𝑐𝑜𝑠𝜃𝑖𝑛)
]−1 (2.45)
where 𝜎′ is known as the local solidity. It is defined as the dimensionless number corresponding
to the ratio of the total differential blade area to the total annular ring area swept by the rotor [30]

44
𝜎′ =
𝐵𝑐
2𝜋𝑟 (2.46)
To determine the state of the air flow, a thrust coefficient for the blade element is required
𝐶𝑇 = [1 +
𝜎′(1 − 𝑎)2(𝐶𝑙𝑐𝑜𝑠𝜃𝑖𝑛 + 𝐶𝑑𝑠𝑖𝑛𝜃𝑖𝑛)
𝑠𝑖𝑛2(𝜃𝑖𝑛)] (2.47)
Eq. (2.47) can be compared with the tip/loss factors in Eq. (2.41) to determine induction factors
[33]. If 𝐶𝑇 > 0.96𝐹, the state of the wind flow is different from steady condition and Eq. (2.43) is
used to calculate the axial induction factor [33]. If 𝐶𝑇 ≤ 0.96𝐹, Eq. (2.44) will be employed to
determine the axial induction since the steady flow assumption can be considered as valid. The
procedure of induction factor calculation will be covered in the next section.
2.1.8 An Iteration Procedure for Induction Factor Calculation
In BEMT, aerodynamic forces are calculated based on the induction factors and angle of attack.
Determining these parameters on each blade element often requires an iteration procedure [33, 35].
The algorithm starts with initial estimates for both axial and tangential induction factors. The initial
value for axial induction factor can be set to any value between 0~0.4, while the initial tangential
induction factor value is normally assumed to be zero. After initialization, the inflow angle is
calculated by using Eq. (2.25), and the thrust coefficient for the element is determined using Eq.
(2.47). To decide whether corrections should be included in the axial induction calculation, Eq.
(2.47) is compared with the loss factor 𝐹 that is calculated by Eq. (2.41). If 𝐶𝑇 > 0.96𝐹, the wind
approaches to a condition where the flow in the far wake begins to propagate upstream and the
steady flow condition is invalid [33]. When such flow states happen, Eq. (2.43) is used to calculate
the new axial induction factor. On the contrary, if 𝐶𝑇 ≤ 0.96𝐹, Eq. (2.44) will be adopted to obtain
the new axial induction [33]. Once a new axial induction factor is obtained, the difference between
the new value and the old one is calculated to check the convergence of the solution. This process

45
is repeated for each element until the factors converge to final values. After that, Eqs. (2.35) and
(2.36) are used to determine thrust forces and torque. A flow chart of iteration procedure to
calculate induction factors and inflow angle is illustrated in Fig. 2.4.
Initialize induction factors
Calculate inflow angle by
using eqn. (2.25)
Determine thrust coefficient CT
by using equation (2.47),
calculate loss factor F from
eqn. (2.41)
in
If CT >0.96F
Calculcate a and a’
using eqns. (2.43) and
(2.45)
Calculcate a and a’
using eqns. (2.44)
and (2.45)
Yes
No
tolerance>anew-aold
End Loop
Yes
Figure 2.4. Induction factor calculation

46
2.2 Generalized Dynamic Wake Method
Calculations in BEMT are steady. This theory assumes that the airflow around the blade airfoil is
always in equilibrium and that the passing flow adjusts instantaneously to a new flow state. In
addition, the radial flow interaction between two adjacent blade elements is ignored. The theory
becomes less accurate when large spanwise pressure variation along the blade takes place [28].
When such situations occur, a model that can capture the flow transient behavior and describe a
more general distribution of pressure is desirable. To account for time dependent behavior and
spatial variation of the inflow, the generalized dynamic wake (GDW) theory is adopted [33, 41].
This theory relates the wind pressure distribution on the blades to the induced velocity distribution
by applying the Euler equations. The purpose of this theory is to determine the induced velocity
for unsteady wind conditions, such that the angle of attack and consequently aerodynamic loads
can be calculated. The induced velocity obtained from GDW theory captures the time, azimuth,
and radial dependency of the wind flow. The theory was originally developed for helicopter
industry [69]. Until recently, it is still being investigated in the study of inflow distribution in the
rotor plane [70-71]. It was first applied to the wind turbine by Suzuki [41]. The formulation of the
theory is briefly presented in this section, along with the related equations and background
information.
2.2.1 Governing Equations
The generalized dynamic wake theory uses the Euler equations to derive the basic governing
equations. The wind losses part of its energy and slows down as it passes through a wind turbine
rotor. The lost velocity is called the induced velocity, which is closely related to the wind pressure.
Assuming the induced velocities are small perturbations, the momentum and continuity equations
for an incompressible potential flow can be written as [41]

47
𝜕�̂�𝑖𝜕�̂�
+ 𝑈∞𝑗𝜕�̂�𝑖𝜕�̂�𝑗
= −𝜕𝛷
𝜕�̂�𝑖 (2.48)
𝜕�̂�𝑖𝜕�̂�𝑖
= 0 (2.49)
where 𝑖 and 𝑗 represent the induced velocity direction and free stream velocity direction. �̂�𝑖 and �̂�𝑖
denote the dimensionless induced velocity and displacement. They are normalized with respect to
rotor velocity and rotor radius respectively. �̂� is dimensionless time and can be determined by
multiplication of rotor speed and time. 𝑈∞𝑗 is the flow stream speed and 𝛷 is the air pressure on
the blade, they are both dimensionless.
Eq. (2.48) shows that the spatial variation of the pressure is a combination of both temporal
unsteady flow and the gradient of flow velocity along the free-stream direction. Thus, the pressure
can be divided into two components [33, 41]: a time dependent term denoted as 𝛷𝐴, and a
convective term denoted as 𝛷𝑉.
𝛷 = 𝛷𝐴 + 𝛷𝑉 (2.50)
Take derivative of Eq. (2.50) with respect to �̂�𝑖, we can have
𝜕𝛷
𝜕�̂�𝑖 =
𝜕𝛷𝐴
𝜕�̂�𝑖+𝜕𝛷𝑉
𝜕�̂�𝑖 (2.51)
Comparing Eq. (2.51) with Eq. (2.48) and equating the time dependent terms as well as the spatial
variation terms, two separated equations can be obtained
𝜕�̂�𝑖𝜕�̂�
= −𝜕𝛷𝐴
𝜕�̂�𝑖 (2.52)
�̂�∞𝑗
𝜕�̂�𝑖𝜕�̂�𝑗
= −𝜕𝛷𝑉
𝜕�̂�𝑖 (2.53)

48
Assuming Eqs. (2.52) and (2.53) are linear and can be expressed with linear operators, 𝐿 and 𝐸,
then they can be written as [33]
𝜕�̂�𝑖𝜕�̂�
= [�̂�𝑖]∗ = 𝐸[𝛷𝐴] (2.54)
�̂�𝑖 = 𝐿[𝛷𝑉] (2.55)
where []∗ represents the time derivative. The 𝐿, 𝐸 terms relate the spatial varying and time
dependent wind pressure to the induced velocity distributions.
If the operators, 𝐿 and 𝐸, are invertible, substituting Eqs. (2.54) and (2.55) to (2.50), the
solution to the dimensionless pressure field is
𝛷 = 𝛷𝐴 + 𝛷𝑉 = 𝐿−1[�̂�𝑖] + 𝐸−1[�̂�𝑖]
∗ (2.56)
If an operator 𝑀 is defined as the inverse of 𝐸, Eq. (2.56) becomes [33]
𝑀[�̂�𝑖]∗ + 𝐿−1[�̂�𝑖] = 𝛷 (2.57)
Eq. (2.57) describes the general form of governing equation of GDW theory. It relates the wind
pressure distribution over the rotor disc to the induced velocity distribution. Descriptions about the
pressure and induced velocity distribution will be provided in the following sections.
2.2.2 Pressure Distribution
Knowledge of pressure distribution is essential to determining induced velocity distribution. To
obtain an analytical form of pressure distribution, we differentiate Eq. (2.48) with respect to �̂�𝑖,
and further simplify the result with the help of Eq. (2.49). A Laplace’s equation for pressure
distribution is obtained as [41]:
𝛻2𝛷 = 0 (2.58)
The boundary conditions for Eq. (2.58) are such that the pressure matches the blade loading on the
rotor blades and are zero at infinity. The thrust force, which simulates the aerodynamic forces on

49
the blades that are normal to the rotor plane, is provided by the pressure discontinuity over the
rotor plane. When expressed in ellipsoidal coordinates, Eq. (2.58) can be solved analytically by
the method of separation of variables. By using these coordinates, the pressure distribution can be
written using a series of Legendre functions in the radial direction, and trigonometric functions in
the azimuthal direction [69-72]. Applying a zero-pressure condition at infinity, the pressure at the
rotor disk can be written as [41]
𝛷(𝜈, 𝜂, 𝜑, �̂�) = ∑ ∑ 𝑃𝑛
𝑚(𝜈)𝑄𝑛𝑚(𝑖𝜂)[𝐶𝑛
𝑚(�̂�) cos(𝑚𝜑)
∞
𝑛=𝑚+1,𝑚+3,⋯
∞
𝑚=0
+ 𝐷𝑛𝑚(�̂�) sin(𝑚𝜑)]
(2.59)
where 𝑚 denotes the harmonics in the azimuthal direction and 𝑛 is the number of radial shape
functions corresponding to the 𝑚𝑡ℎ harmonic; 𝑃𝑛𝑚(𝜈) and 𝑄𝑛
𝑚(𝑖𝜂) are the associated Legendre
functions of the first and second kind respectively, expressions for them are provided in the
Appendix A; 𝐶𝑛𝑚(�̂�) and 𝐷𝑛
𝑚(�̂�) are arbitrary coefficients to be determined; 𝜈, 𝜂 and 𝜑 are
ellipsoidal coordinates as described in Appendix B. Since 𝑃𝑛𝑚(𝜈) with (𝑛 + 𝑚) even gives no
pressure discontinuity across the rotor disc, only the terms with (𝑛 +𝑚) odd are retained in Eq.
(2.59). The Legendre function 𝑃𝑛𝑚(𝜈) is characterized only for 𝑛 ≥ 𝑚 according to its
mathematical definition.
2.2.3 Induced Velocity Distribution
The induced velocity distribution is closely related to the pressure distribution and can also be
written in terms of radial distribution functions and harmonic variations in azimuth direction [41]
�̂�(�̂�, 𝜑, �̂�) =∑ ∑ 𝛹𝑗
�̅�(�̂�)[𝛼𝑗�̅�(�̂�) cos(�̅�𝜑) + 𝛽𝑗
�̅�(�̂�) sin(�̅�𝜑)]
∞
𝑗=�̅�+1,�̅�+3,⋯
∞
�̅�=0
(2.60)

50
where �̅� is the harmonic in the azimuthal direction and 𝑗 is the number of radial shape functions
for the �̅�𝑡ℎ harmonic. 𝑗 = �̅� + 1 is the first radial mode corresponding to the �̅�𝑡ℎ harmonic while
𝑗 = �̅� + 3 is the second radial mode corresponding to the �̅�𝑡ℎ harmonic. Similar to the pressure
distribution, only the terms with (�̅� + 𝑗) are odd numbers are retained in Eq. (2.60) so that there is
a pressure discontinuity across the rotor disc. �̂� is the dimensionless radius with respect to blade
length; 𝛹𝑗�̅�(�̂�) is the radial shape function which describes the velocity variation in the radial
direction; and cos(�̅�𝜑) and sin(�̅�𝜑) are trigonometric functions that capture the velocity variations
in the azimuthal direction. The coefficients 𝛼𝑗�̅�(�̂�) and 𝛽𝑗
�̅�(�̂�) can be considered as the time
dependent states of the induced flow. They are determined from the aerodynamic loading on the
rotor blades.
The radial expansion function in Eq. (2.60) has the following form [41]
𝛹𝑗�̅�(�̂�) = √(2𝑗 + 1)𝐻𝑗
�̅� ∑ �̂�𝑞(−1)
𝑞−�̅�2 (𝑗 + 𝑞)‼
(𝑞 − �̅�)‼ (𝑞 + �̅�)(𝑗 − 𝑞 − 1)‼
𝑗−1
𝑞=�̅�,�̅�+2,⋯
(2.61)
𝐻𝑗�̅� =
(𝑗 + �̅� − 1)‼ (𝑗 − �̅� − 1)‼
(𝑗 + �̅�)‼ (𝑗 − �̅�)‼ (2.62)
where ()‼ represents a double factorial.
In practice, the number of the terms in the series in Eq. (2.60) must be truncated so that a
program can run at a reasonable speed. The number of harmonics for the induced velocity
distribution depends on the number of wind turbine blades. Since we consider a three-blade
horizontal wind turbine in our study, 0𝑃(�̅� = 0), 1𝑃(�̅� = 1), 2𝑃(�̅� = 2), and 3𝑃(�̅� = 3) harmonic
terms and the first radial mode corresponding to these harmonics are used in our model. “𝑃”
represents the once per revolution distribution (rotor speed). We also include the second radial

51
modes of the 0𝑃 term (𝛹30) and 1𝑃 term (𝛹4
1) to correct the pressure distribution at the hub. Then
the expression for the induced velocity can be written as [41]:
�̂�(�̂�, 𝜑, �̂�) = 𝛹10(�̂�)𝛼1
0(�̂�) + 𝛹30(�̂�)𝛼3
0(�̂�) + 𝛹21(�̂�)[𝛼2
1(�̂�) cos 𝜑 + 𝛽21(�̂�) sin𝜑]
+ 𝛹41(�̂�)[𝛼4
1(�̂�) cos 𝜑 + 𝛽41(�̂�) sin 𝜑]
+ 𝛹32(�̂�)[𝛼3
2(�̂�) cos(2𝜑) + 𝛽32(�̂�) sin(2𝜑)]
+ 𝛹43(�̂�)[𝛼4
3(�̂�) cos(3𝜑) + 𝛽43(�̂�) sin(3𝜑)]
(2.63)
Determination of the coefficients in Eq. (2.63) is required to describe the induced velocity
distribution. In GDW theory, those coefficients are calculated by solving the first order differential
equations.
2.2.4 Expansion of Governing Equations
Calculating the time dependent coefficients 𝛼𝑗�̅�(�̂�) and 𝛽𝑗
�̅�(�̂�) is necessary to obtain the induced
velocities. Eq. (2.57) shows that induced velocity distribution is related to the pressure distribution.
Therefore, coefficients 𝛼𝑗�̅�(�̂�) and 𝛽𝑗
�̅�(�̂�) are determined from the pressure coefficients 𝜏𝑛𝑚𝑐 and
𝜏𝑛𝑚𝑠 in GDW theory. With the help of the expressions for pressure and induced velocity in the Eqs.
(2.59-2.60), the dynamics equations that relate the pressure coefficients to the velocity coefficients
are derived as below; Eq. (2.64) describes the cosine terms, and Eq. (2.65) describes the sine terms
[41].
[𝑀𝑐] {⋮
{𝛼𝑗�̅�}
⋮
}
∗
+ [𝑉][𝐿𝑐]−1 {⋮
{𝛼𝑗�̅�}
⋮
} =1
2{
⋮{𝜏𝑛𝑚𝑐}⋮} (2.64)
[𝑀𝑠] {⋮
{𝛽𝑗�̅�}
⋮
}
∗
+ [𝑉][𝐿𝑠]−1 {⋮
{𝛽𝑗�̅�}
⋮
} =1
2{
⋮{𝜏𝑛𝑚𝑠}⋮} (2.65)

52
where “{∙}∗” denotes the time derivative, 𝑐 and 𝑠 denote the cosine and sine terms. Matrix [𝑀] is
associated with the acceleration part of the induced flow, and can be called the apparent mass
matrix. Matrix [𝑉][𝐿]−1 represents the spatial variation of the induced velocity. The pressure
coefficients on the right-hand side of the equations are determined by the pressure drop across the
rotor disk. The cosine terms and sine terms are calculated separately in Eqs. (2.64) and (2.65).
There is no coupling between cosine and sine terms, which indicates the wake rotation is not
included in GDW model. To account for that, the BEMT is used to calculate the induced velocity
in the tangential direction.
To obtain velocity coefficients (𝛼𝑗�̅�, 𝛽𝑗
�̅�) from Eqs. (2.64) and (2.65), apparent mass matrix
[𝑀], inflow matrix [𝐿], flow parameter matrix [𝑉], and pressure coefficients (𝜏𝑛𝑚𝑐 , 𝜏𝑛
𝑚𝑠) need to
be determined. The 𝑀 operator is related to the kinetic energy in the induced flow distributions
and is the same for cosine and sine terms [41]
[𝑀] = [
⋱𝐾𝑛𝑚
⋱
] (2.66)
𝐾𝑛𝑚 =
2
𝜋𝐻𝑛𝑚 =
2
𝜋
(𝑛 + 𝑚 − 1)‼ (𝑛 − 𝑚 − 1)‼
(𝑛 + 𝑚)‼ (𝑛 − 𝑚)‼ (2.67)
The difference between [𝑀𝑐] and [𝑀𝑠] is that [𝑀𝑐] has elements for 𝑚 = 0 while [𝑀𝑠] does not.
Eq. (2.66) shows that the mass matrix is a diagonal one, which indicates that the there is no
coupling in either radial or harmonic direction.
The inflow influence coefficient matrix [𝐿] relates the radial pressure distribution to the
radial velocity distribution of the induced inflow. It depends on the wake skew angle 𝜒, and is
different for sine and cosine terms [33, 41]

53
[𝐿𝑗𝑛𝑜𝑚]
𝑐= 𝑋𝑚[𝛤𝑗𝑛
𝑜𝑚] (2.68)
[𝐿𝑗𝑛�̅�𝑚]
𝑐= [𝑋|𝑚−�̅�| + (−1)𝑙𝑋|𝑚+�̅�|][𝛤𝑗𝑛
�̅�𝑚] (2.69)
[𝐿𝑗𝑛�̅�𝑚]
𝑠= [𝑋|𝑚−�̅�| − (−1)𝑙𝑋|𝑚+�̅�|][𝛤𝑗𝑛
�̅�𝑚] (2.70)
with
𝑙 = min(�̅�,𝑚) (2.71)
𝑋 = 𝑡𝑎𝑛 |𝜒
2| =
𝜇
𝑉𝑇 + |𝜆| (0 ≤ 𝜒 ≤ 𝜋 2⁄ ) (2.72)
𝛤𝑗𝑛�̅�𝑚 =
(−1)𝑛+𝑗−2�̅�
2
2√𝐻𝑛𝑚𝐻𝑗
�̅�
2√(2𝑛 + 1)(2𝑗 + 1)
(𝑗 + 𝑛)(𝑗 + 𝑛 + 2)[(𝑗 − 𝑛)2 − 1], 𝑓𝑜𝑟 �̅� + 𝑚 = 𝑒𝑣𝑒𝑛 (2.73)
𝛤𝑗𝑛�̅�𝑚 =
𝜋
2√𝐻𝑛𝑚𝐻𝑗
�̅�
𝑠𝑖𝑔𝑛(�̅� − 𝑚)
√(2𝑛 + 1)(2𝑗 + 1), 𝑓𝑜𝑟 �̅� + 𝑚 = 𝑒𝑣𝑒𝑛 and |𝑗 − 𝑛| = 1
(2.74)
𝛤𝑗𝑛�̅�𝑚 = 0, 𝑓𝑜𝑟 �̅� + 𝑚 = 𝑜𝑑𝑑 and |𝑗 − 𝑛| ≠ 1 (2.75)
where 𝜇 is dimensionless in-plane incoming velocity, 𝜆 is dimensionless total induced velocity,
and 𝑉𝑇 is dimensionless total flow velocity at rotor plane. We wish to point out that in Eq. (2.73),
[(𝑗 − 𝑛)2 − 1] is used rather than [(𝑗 + 𝑛)2 − 1] as appears in [33, 41], which we believe is a
typographical error. The relation between the induced velocity distribution and the pressure
distribution cannot be accurately captured if the wrong expression is adopted. An inaccurate
description will lead to convergence problems in the numerical calculation.
The flow parameters matrix [𝑉] is defined as [41]
[𝑉] = [
𝑉𝑇 0 00 𝑉𝑣 00 0 𝑉𝑣
] (2.76)
where 𝑉𝑣 accounts for the energy gained by the rotor from the wind flow.

54
The total flow parameter 𝑉𝑇 can be expressed as [41]
𝑉𝑇 = √𝜇2 + 𝜆2 (2.77)
The inflow parameter 𝑉𝑣 can be written as [41]
𝑉𝑣 =
𝜇2 + (𝜆 + 𝜆𝑚)𝜆
√𝜇2 + 𝜆2 (2.78)
where
𝜆 = 𝜆𝑚 + 𝜆𝑓 (2.79)
𝜆𝑓 =
𝑈∞𝑐𝑜𝑠𝜒
𝛺𝑅 (2.80)
𝜆𝑚 =
2
√3{1 0 0 ⋯}[𝐿𝑐]−1 {
⋮{𝛼𝑗
�̅�}
⋮
} (2.81)
In the above, 𝜆𝑓 is the dimensionless total inflow due to free stream wind, and 𝜆𝑚 is dimensionless
momentum theory induced velocity. Eqs. (2.77-2.79) and (2.81) indicate that the coupling between
𝑉𝑇 and 𝛼𝑗�̅� causes the nonlinearity.
The pressure coefficients are calculated by normalizing the thrust force and multiplying it
by the radial expansion function and azimuthal expansion function [33]
𝜏𝑛𝑚𝑐 =
1
𝜋𝜌𝛺2𝑅4∑[∑𝐿𝑖
𝑞𝛹𝑛𝑚(�̂�𝑖)
𝑁𝐸
𝑖=1
] cos (𝑚𝜑)
𝐵
𝑞=1
(2.82)
𝜏𝑛𝑚𝑠 =
1
𝜋𝜌𝛺2𝑅4∑[∑𝐿𝑖
𝑞𝛹𝑛𝑚(�̂�𝑖)
𝑁𝐸
𝑖=1
] sin (𝑚𝜑)
𝐵
𝑞=1
(2.83)
where 𝑅 is the rotor radius, 𝑁𝐸 is the total number of blade elements, and 𝐿𝑖𝑞 is the element thrust
force acting on blade element 𝑖 of blade 𝑞. The sine terms in Eq. (2.82) is not defined for 𝑚 = 0

55
since they are multiplied by 0. The definition for cosine terms for 𝑚 = 0 is affected by the [𝐿𝑗𝑛𝑜𝑚]
𝑐in
Eq. (2.68) and can be expressed as [33]
𝜏𝑛0𝑐 =
1
2𝜋𝜌𝛺2𝑅4∑[∑𝐿𝑖
𝑞𝛹𝑛0(�̂�𝑖)
𝑁𝐸
𝑖=1
]
𝐵
𝑞=1
(2.84)
With the help of Eqs. (2.66-2.84), the time dependent coefficients 𝛼𝑗�̅�(�̂�) and 𝛽𝑗
�̅�(�̂�) can be obtained
by solving Eqs. (2.64-2.65), which can be adopted to calculate the induced velocity distribution.
The calculation procedure of the induced velocity distribution will be described in the next section.
2.2.5 Procedure for Generalized Dynamic Wake Calculation
A flowchart of the numerical calculation of the model for GDW is given in Fig. 2.5. Since GDW
theory needs initial parameters to start with, we first run the BEMT based program for a few
seconds before running the GDW based program. Then, loads and blade parameters from BEMT
are provided to the GDW program to calculate the pressure coefficients from Eqs. (2.82) and
(2.83). These pressure coefficients form the right-hand side of Eqs. (2.64) and (2.65). After that,
Eqs. (2.66-2.81) are utilized to calculate the apparent mass matrix [𝑀], inflow influence coefficient
matrix [𝐿] and flow parameter matrix [𝑉]. Further, Eqs. (2.64) and (2.65) can be solved to obtain
the coefficients 𝛼𝑗�̅�(�̂�) and 𝛽𝑗
�̅�(�̂�). The induced velocity distribution can then be calculated from
Eq. (2.63). Once the induced velocity over the rotor plane is obtained, the angle of attack for each
element can be determined. Using the blade element theory [30, 32], this angle of attack can then
be used to determine the aerodynamic loads, which can be coupled with a structure model to
predict the aeroelastic behavior of the wind turbines.

56
Calculate the pressure coefficients
from eq. (2.82) and (2.83)
Input aerodynamic loads and blade
parameters from BEMT
Determine matrix [M], [V] and [L]
from eq. (2.66)-(2.81)
Calculate 𝛼 and 𝛽 from eq. (2.64) and (2.65)
Solve induced velocity distribution
from eq. (2.63)
Determine angle of attack
Calculate aerodynamic loads from
angle of attack
End
Figure 2.5. Numerical solution of GDW model
In summary, two aerodynamic modeling theories are presented in this chapter to capture both the
steady and unsteady wind flow conditions. Understanding the wind turbine aerodynamics is
essential to accurately predicting aeroelastic response. In addition to aerodynamic loads, a blade
structure model is required to fully describe the fluid-structure interaction. Modeling the structural
dynamics will be the focus of the next chapter.

57
Chapter Three: Structural Dynamics Modeling
In addition to aerodynamic loads, structural dynamics also plays an important role in predicting
aeroelastic response and understanding the fluid-structure interaction. Since the blade vibration
affects aerodynamic loads, an integrated aerodynamic and structural model should be used in the
aeroelastic analysis. Determining the equations of motion of the structural dynamics system is
therefore necessary. In this chapter, we derive the equations of motion by adopting the Euler-
Lagrange approach. Both the finite element method and the assumed mode method are applied to
discretize the partial differential equations. To improve the modeling accuracy, we carefully derive
the coupling terms between rotor gross motion and blade elastic deformation. Including such terms
is important for understanding the torsional vibration of the rotor system due to possible blade
faults. We also incorporate the effects of gravity and centrifugal stiffening to account for their
influences on rotor/blade vibrational behavior. Blade deflects in flapwise and edgewise directions.
Without loss of generality, we consider a three-blade horizontal axis wind turbine (HAWT)
system.
3.1 Coordinate Transformation
We start the process of system modeling by defining necessary coordinate frames as shown in Fig.
3.1 and Fig. 3.2. Fig. 3.1 is sketched as viewed from the upwind side. A rotor/blade system
undergoes both gross rotational motion and small elastic body deformation. In general, the blade
elastic body motion includes the flapwise and edgewise bending deflections, as well as the axial
and torsional deformations. Of all the deformations, flapwise deflection receives the most attention
not only because of its relatively large magnitude compared to the edgewise deflection, but also
because of its direct influence on aerodynamic loading. On the other hand, according to Hansen
[32], blade torsion is generally ignored since wind turbine blades are relatively stiffer in that

58
direction. Large blade design usually allows twist design along the length direction and can be
pitched during operation. The twist angle varies along the length of the blade and is a static feature
of the blade design. When blades are designed with twist, flapwise and edgewise deflections affect
each other. In addition, pitching of a blade during operation introduces interactions between the
rotor rotation and blade deformation. The interaction is the main physical reason for the coupling
between the blade’s rigid body rotation and elastic body motion.
a)
b)
Figure 3.1. A three-blade horizontal wind turbine: a) HAWT configuration; b) Blade rotational
coordinate
Figure 3.2. Blade elastic coordinate

59
Referring to Fig. 3.1 and Fig. 3.2, the following coordinate systems are introduced. Frame
(𝑶𝑰𝑿𝑰𝒀𝑰𝒁𝑰) is the inertial frame, and is fixed at the center of the hub. The 𝑿𝑰 axis points in the
downwind direction, and coincides with the hub center line; the 𝒁𝑰 axis points to the upward
direction, and the 𝒀𝑰 axis is determined from the right hand rule. Frame (𝑶𝒉𝑿𝒉𝒀𝒉𝒁𝒉) represents
the hub coordinate system and is used to describe the blade rigid body motion. The 𝑿𝒉 axis
coincides with the 𝑿𝑰 axis; the 𝒁𝒉 axis points along each blade’s length direction, and the 𝒀𝒉 axis
follows the right-hand rule as well. Frame (𝑶𝒃𝑿𝒃𝒀𝒃𝒁𝒃) is the global blade coordinate system and
is attached to the root of each blade. The 𝑿𝒃 axis points in the flapwise direction at zero twist angle
position (out of plane direction); the 𝒀𝒃 axis points in the edgewise direction at zero twist angle
position (in plane direction), and the 𝒁𝒃 axis points in the undeformed axial direction. Moreover,
to account for the effect of blade twist angle, a local blade coordinate system (𝑶𝒕𝑿𝒕𝒀𝒕𝒁𝒕) is
introduced to coincide with the global blade system when there is no twist. If the blade is twisted
along its length, frame (𝑶𝒕𝑿𝒕𝒀𝒕𝒁𝒕) differs from the global blade coordinate about the axis 𝒁𝒃 by
the twist angle.
We consider rotor clockwise rotation as the positive direction when viewed from the
downwind direction. To define the configuration relations of all the aforementioned frames, we
inspect the transformation from one frame to another. For instance, the hub frame (𝑶𝒉𝑿𝒉𝒀𝒉𝒁𝒉)
can be considered as rotating the inertial frame (𝑶𝑰𝑿𝑰𝒀𝑰𝒁𝑰) about the 𝑿𝑰 axis by the azimuth angle
𝜑. As can be seen from Fig. 3.1b, the hub coordinate is related to the inertial coordinate by this
azimuth angle. The relationship between the unit vectors of the inertial coordinate system (𝑰𝑰𝑱𝑰𝑲𝑰)
and hub coordinate system (𝑰𝒉𝑱𝒉𝑲𝒉) can be expressed as:

60
[𝑰𝑰𝑱𝑰𝑲𝑰
] = [1 0 00 𝑐𝑜𝑠𝜑 −𝑠𝑖𝑛𝜑0 𝑠𝑖𝑛𝜑 𝑐𝑜𝑠𝜑
] [𝑰𝒉𝑱𝒉𝑲𝒉
] (3.1)
The global blade coordinate system (𝑶𝒃𝑿𝒃𝒀𝒃𝒁𝒃) is established by pitching the blade from
the hub coordinate (𝑶𝒉𝑿𝒉𝒀𝒉𝒁𝒉) system about the 𝒁𝒉 axis. The global blade coordinate coincides
with the hub coordinate if the pitch angle is zero. The associated unit vectors (𝑰𝒃𝑱𝒃𝑲𝒃) of the
global blade coordinate can be related to the unit vectors (𝑰𝒉𝑱𝒉𝑲𝒉) of the hub coordinate by the
following relationship:
[𝑰𝒉𝑱𝒉𝑲𝒉
] = [𝑐𝑜𝑠𝜃 𝑠𝑖𝑛𝜃 0−𝑠𝑖𝑛𝜃 𝑐𝑜𝑠𝜃 00 0 1
] [𝑰𝒃𝑱𝒃𝑲𝒃
] (3.2)
where 𝜃 is the pitch angle.
Since the geometry of the blade is twisted along the spanwise direction, the orientation of
the local blade coordinate (𝑶𝒕𝑿𝒕𝒀𝒕𝒁𝒕) is different from the orientation of the global blade
coordinate (𝑶𝒃𝑿𝒃𝒀𝒃𝒁𝒃). The unit vectors of the local blade coordinate (𝑰𝒕𝑱𝒕𝑲𝒕) and the global
coordinate (𝑰𝒃𝑱𝒃𝑲𝒃) satisfy the following:
[𝑰𝒕𝑱𝒕𝑲𝒕
] = [𝑐𝑜𝑠𝜃𝑡 𝑠𝑖𝑛𝜃𝑡 0−𝑠𝑖𝑛𝜃𝑡 𝑐𝑜𝑠𝜃𝑡 00 0 1
] [𝑰𝒃𝑱𝒃𝑲𝒃
] (3.3)
where 𝜃𝑡 is the twist angle. The coordinate transformation introduced in this section is helpful in
deriving the dynamics equations for the wind turbine rotor blade system.
3.2 Euler-Lagrange’s Approach
We adopt the Euler-Lagrange’s method to derive the equations of motion. This method is energy-
based and is efficient for solving problems when large degrees of freedom are involved.
Lagrange’s equation of motion can be expressed as [72, 73]

61
𝑑
𝑑𝑡(𝜕𝐿
𝜕�̇�𝑗) −
𝜕𝐿
𝜕𝑞𝑗= 𝑄𝑗 𝑗 = 1,2,⋯ , 𝑛 (3.4)
where 𝑞𝑗 , 𝑗 = 1,2,⋯ , 𝑛 are generalized coordinates. They are usually determined as the minimum
number of independent coordinates that define the configuration of a system. 𝐿 signifies the
Lagrangian, which is defined as the difference between kinetic energy and potential energy. 𝑄𝑗
represents the generalized force associated with generalized coordinate and can be determined
from the principle of virtual work. The principle of virtual work mathematically expresses the
static equilibrium of a mechanical system:
𝛿𝑊̅̅̅̅̅ =∑𝑭𝒊 ∙ 𝜹𝒓𝒊
𝑁
𝑖=1
= 0 (3.5)
where 𝛿𝑊̅̅̅̅̅ is the virtual work, 𝑭𝒊 is the applied forces that are of external nature, and 𝜹𝒓𝒊 is the
virtual displacement. The virtual displacements are defined as the infinitesimal changes in the
coordinates that are compatible with the constraints in the system. Eq. (3.5) can be interpreted as
that the total work done by the external forces through virtual displacements is zero. The principle
of virtual work is useful in deriving the generalized forces that appears in the Lagrange’s equation.
Different from the Newton’s method, functions in the Lagrange’s approach are expressed
in the scalar quantities. The Lagrangian mechanics can avoid the computation of constraint forces
that do not do work. When the number of degrees of freedom involved in a system is high, this
approach is very efficient for deriving the equations of motion. Perhaps the most challenging part
in using this approach is to determine the generalized coordinates and generalized forces.
However, such identification does not present too much difficulty in most of the physical systems.
The nature of the dynamics of a rotating elastic body will lead to partial differential
equations. To solve the equations, discretizing them into ordinary differential ones is helpful. We

62
adopt both the finite element method and the assumed mode method to discretize the system. The
associated governing equations are referred to as the finite element model and assumed mode
model, respectively. The derivation of those two models is explained in more detail in the
following sections. The finite element discretization method will be introduced first.
3.3 The Finite Element Model
This section introduces the procedure for deriving the system equations by using the finite element
method, which discretizes the blade along the length dimension. The advantage of this method is
that it can more accurately capture the two-way fluid structure interaction. Such benefit will
become obvious as we go through the equation derivation procedure.
3.3.1 The Finite Element Method
We first introduce the basic idea of the finite element method. This method regards a complex
structure as an assemblage of finite elements. Each element is part of a continuous structural
member [68]. Adjacent elements are connected by nodes. Internal loads and displacements at each
node connected with adjacent elements must satisfy compatibility conditions. In wind turbine
applications, aerodynamic loads are distributed on the blades. It is convenient to discretize the
blades into finite elements so that load variation along the blade can be easily accommodated.
In the finite element method, displacement at any point of the whole structure is expressed
as the multiplication of displacements at the nodal points and given interpolation functions. We
use a wind turbine blade to illustrate the idea of finite element discretization. Suppose that we
divide a wind turbine blade into several elements. The blade is discretized along the blade length,
and blade deflection in a local blade element can be expressed as
𝑢𝑓 = [𝑁(𝑥)]𝒒𝒇 , 𝑢𝑒 = [𝑁(𝑥)]𝒒𝒆 (3.6)

63
where 𝑢𝑓 is the flapwise deflection, 𝑢𝑒 is the edgewise deflection, and 𝑁(𝑥) is shape function. 𝒒𝒇
and 𝒒𝒆 are the nodal degrees of freedom in flapwise direction and edgewise direction, they contain
both nodal displacements and rotations. “[]” represents the row vector. We use the flapwise
direction in a local blade element 𝑛 to explain how finite element discretization is performed. As
shown in Fig. 3.3, the total nodal degrees of freedom include nodal displacements 𝑤𝑓1 and 𝑤𝑓
2, as
well as nodal rotations 𝜃𝑓1 and 𝜃𝑓
2. The nodes at both ends are shared by the adjacent elements.
Shape function 𝑁(𝑥) is the interpolation function that describes the blade displacements at any
point within the blade element. The edgewise nodal degrees of freedom are considered in a similar
way but independently.
1
fw
2
f
2
fw1
f
x
l
( )w x
Figure 3.3. Nodal degrees of freedom in the flapwise direction
With the help of shape function, the flapwise displacement 𝑤(𝑥) within one blade element can be
calculated as
𝑤(𝑥) = 𝑁1(𝑥)𝑤𝑓1 + 𝑁2(𝑥)𝑙𝜃𝑓
1 + 𝑁3(𝑥)𝑤𝑓2 + 𝑁4(𝑥)𝑙𝜃𝑓
2 , (3.7)
with the interpolation functions defined as
𝑁1(𝑥) =
1
𝑙3(2𝑥3 − 3𝑥2𝑙 + 𝑙3) (3.8)

64
𝑁2(𝑥) =
1
𝑙3(𝑥3𝑙 − 2𝑥2𝑙2 + 𝑥𝑙3) (3.9)
𝑁3(𝑥) =
1
𝑙3(2𝑥3 + 3𝑥2𝑙) (3.10)
𝑁4(𝑥) =
1
𝑙3(𝑥3𝑙 − 𝑥2𝑙2) (3.11)
Eqs. (3.8-3.11) are known as Hermitian polynomials. 𝑥 is the distance in an element as illustrated
in Fig. 3.3 while 𝑙 is the element length. These interpolation functions are not unique and many
other choices are possible [72]. The functions we chose here represent the lowest degree
polynomials for fourth-order problems.
By adopting the finite element method, the equations of motion can be derived by first
deriving the equations at one element and then assembling all element’s equations together. Once
obtaining the equations at the local element level, we need to extend the results for individual
elements to the complete structure. For the final equations to represent the entire structure
adequately, the displacements at the nodes shared by several elements must be compatible when
assembling element’s equations. In other words, the displacements at the nodes shared by the
several elements must be the same for every such element. In addition, the corresponding nodal
forces at each node must include the effects of the forces from the adjacent elements. Interested
reader can refer to [72] for more information about finite element assembly.
By using the finite element discretization in conjunction with the Lagrange’s approach,
ordinary differential equations that governs the motion of the rotor blade system can be obtained.
With the help of these two methods, deriving the equations of motion at the local element can be
made possible.

65
3.3.2 The Energy Terms
To follow the Lagrange’s formulation as in Eq. (3.4), the first step is to formulate kinetic and
potential energy terms. The system is composed of three blades and a rotor. Since wind turbine
blades are usually long and slender, they can be considered Euler Bernoulli beams. Let P be an
arbitrary point on a local blade element 𝑛. Velocity of this point 𝒗𝒑 with respect to the inertial
frame contains two components: one associated with the rotor rotation and the other associated
with the blade deflection
𝒗𝒑 = (𝑟 + (𝑛 − 1)𝑙 + 𝑥)�̇�𝑱𝒉 +
𝜕𝑢𝑓𝑙 (𝑥, 𝑡)
𝜕𝑡𝑰𝒕 +
𝜕𝑢𝑒𝑙 (𝑥, 𝑡)
𝜕𝑡𝑱𝒕
= {(𝑟 + (𝑛 − 1)𝑙 + 𝑥)�̇�𝑠𝑖𝑛𝜃 +𝜕𝑢𝑓
𝑔(𝑥, 𝑡)
𝜕𝑡𝑐𝑜𝑠𝜃𝑡 +
𝜕𝑢𝑒𝑔(𝑥, 𝑡)
𝜕𝑡𝑠𝑖𝑛𝜃𝑡}𝑰𝒃
+{(𝑟 + (𝑛 − 1)𝑙 + 𝑥)�̇�𝑐𝑜𝑠𝜃 −𝜕𝑢𝑓
𝑔(𝑥, 𝑡)
𝜕𝑡𝑠𝑖𝑛𝜃𝑡 +
𝜕𝑢𝑒𝑔(𝑥, 𝑡)
𝜕𝑡𝑐𝑜𝑠𝜃𝑡}𝑱𝒃
(3.12)
where 𝑟 is the hub radius, 𝑙 is the blade element length, 𝑥 is the distance from the start of the 𝑛𝑡ℎ
element to point P, and �̇� is the rotor speed. 𝑢𝑓𝑙 and 𝑢𝑒
𝑙 represent the local blade flapwise and
edgewise deflections while 𝑢𝑓𝑔
and 𝑢𝑒𝑔
represent the blade flapwise and edgewise deflections in
global frame. In Eq. (3.12), both the rotor speed and the blade local velocity are expressed in the
blade coordinates by adopting the Eqs. (3.2) and (3.3). When we take the norm of 𝒗𝒑 to derive the
kinetic energy, the multiplication will lead to expressions that couple the rotor speed and blade
velocity. These terms represent the coupling between the rotor rotation �̇� and blade elastic
deformation 𝑢.
Assuming the mass density through one element is constant, blade kinetic energy in a local
blade element 𝑛 can be expressed as:

66
𝑇𝑏𝑛 =
1
2𝜌∫𝒗𝒑 ∙ 𝒗𝒑𝑑𝑥
𝑙
0
=1
2𝜌∫(𝑟 + (𝑛 − 1)𝑙 + 𝑥)2�̇�2𝑑𝑥
𝑙
0
+1
2𝜌∫ [
𝜕𝑢𝑓𝑔(𝑥, 𝑡)
𝜕𝑡]
2
𝑑𝑥
𝑙
0
+1
2𝜌∫ [
𝜕𝑢𝑒𝑔(𝑥, 𝑡)
𝜕𝑡]
2
𝑑𝑥
𝑙
0
+𝜌∫(𝑟 + (𝑛 − 1)𝑙 + 𝑥)�̇� · 𝑠𝑖𝑛𝜃 · 𝑐𝑜𝑠𝜃𝑡𝜕𝑢𝑓
𝑔(𝑥, 𝑡)
𝜕𝑡𝑑𝑥
𝑙
0
−𝜌∫(𝑟 + (𝑛 − 1)𝑙 + 𝑥)�̇� · 𝑐𝑜𝑠𝜃 · 𝑠𝑖𝑛𝜃𝑡𝜕𝑢𝑓
𝑔(𝑥, 𝑡)
𝜕𝑡𝑑𝑥
𝑙
0
+𝜌∫(𝑟 + (𝑛 − 1)𝑙 + 𝑥)�̇� · 𝑠𝑖𝑛𝜃 · 𝑠𝑖𝑛𝜃𝑡𝜕𝑢𝑒
𝑔(𝑥, 𝑡)
𝜕𝑡𝑑𝑥
𝑙
0
+𝜌∫(𝑟 + (𝑛 − 1)𝑙 + 𝑥)�̇� · 𝑐𝑜𝑠𝜃 · 𝑐𝑜𝑠𝜃𝑡𝜕𝑢𝑒
𝑔(𝑥, 𝑡)
𝜕𝑡𝑑𝑥
𝑙
0
(3.13)
In the above, the last four terms in Eq. (3.13) represent the coupling between rotor rotation and
elastic deformation. Such coupling is enabled through the blade twist 𝜃𝑡 and pitch angle 𝜃. A blade
is twisted along the spanwise direction and can be pitched during the operation so that the blade
performance in extracting energy from the wind can be improved. Pitching movement can also
help reduce blade loads during high wind speed condition.
Hub kinetic energy associated with the rotor rotation is relatively simple to calculate:
𝑇𝒉 =
1
2𝐽ℎ�̇�
2 (3.14)

67
where 𝐽ℎ is the hub moment of inertia. To calculate the potential energy of the system, we consider
the terms due to the beam elastic deformation, the centrifugal force, and gravity. Again, blade
torsional deformation is not considered in our model. The twist angle is assumed to be constant
within an element. In a local blade element, cross-sectional area and bending stiffness in the
flapwise and edgewise directions are also assumed to be constant. With these assumptions, the
strain energy stored in a blade element 𝑛 can be expressed as
𝑉𝑠𝑛 =
1
2∫𝐸𝐼𝑓 [
𝜕2𝑢𝑓𝑙 (𝑥, 𝑡)
𝜕𝑥2]
2
𝑑𝑥
𝑙
0
+1
2∫𝐸𝐼𝑒 [
𝜕2𝑢𝑒𝑙 (𝑥, 𝑡)
𝜕𝑥2]
2
𝑑𝑥
𝑙
0
=1
2∫ [𝜕2𝑢𝑓
𝑔(𝑥, 𝑡)
𝜕𝑥2]
2
𝑑𝑥 ·
𝑙
0
(𝐸𝐼𝑓 · 𝑐𝑜𝑠2𝜃𝑡 + 𝐸𝐼𝑒 · 𝑠𝑖𝑛
2𝜃𝑡)
+1
2∫ [𝜕2𝑢𝑒
𝑔(𝑥, 𝑡)
𝜕𝑥2]
2
𝑑𝑥 ·
𝑙
0
(𝐸𝐼𝑓 · 𝑠𝑖𝑛2𝜃𝑡 + 𝐸𝐼𝑒 · 𝑐𝑜𝑠
2𝜃𝑡)
+∫𝜕2𝑢𝑓
𝑔(𝑥, 𝑡)
𝜕𝑥2·𝜕2𝑢𝑒
𝑔(𝑥, 𝑡)
𝜕𝑥2𝑑𝑥
𝑙
0
· (𝐸𝐼𝑓 − 𝐸𝐼𝑒) · 𝑠𝑖𝑛𝜃𝑡 · 𝑐𝑜𝑠𝜃𝑡
(3.15)
where 𝐸𝐼𝑓 and 𝐸𝐼𝑒 are the blade flapwise and edgewise bending stiffness.
We now calculate the centrifugal force caused by the rotational movement by adopting the
method from the literature [74-75]. We divide a blade into 𝑚 elements. The centrifugal force is
defined as the internal force in the blade acting at a distance (𝑟 + (𝑛 − 1)𝑙 + 𝑥) from the hub due
to centrifugal acceleration. Therefore, the force is the inertia force over the mass volume beyond
this distance from the hub, as shown in Fig. 3.4
𝐹𝑐 = ∫𝜌�̇�2(𝑟 + (𝑛 − 1)𝑙 + 𝑥′)𝑑𝑥′
𝑙
𝑥
+ ∫ 𝜌�̇�2(𝑟 + 𝑥)𝑑𝑥
𝑚𝑙
𝑛𝑙
(3.16)

68
= (−𝑟𝑥 − (𝑛 − 1)𝑙𝑥 −1
2𝑥2 + 𝐶𝑐) 𝜌�̇�
2
where 𝑛 is the index of the beam element on which the centrifugal force is evaluated, and
𝐶𝑐 = 𝑟𝑙(𝑚 − (𝑛 − 1)) +
1
2𝑙2(𝑚2 − (𝑛 − 1)2) (3.17)
ml
nl
x
l lr
Figure 3.4. Centrifugal force illustration
The centrifuga force always points radially outwards and is conservative. The potential energy
associated with the centrifugal force becomes active once the blade is in rotational motion. As the
angular speed becomes higher, the centrifugal force contributes to increased bending stiffness for
a rotating beam [20, 42]. The increasing stiffness affects the natural frequency of the rotating beam
and is referred to as “centrifugal stiffening” in the literature. To account for the effect of stiffness
change, an equivalent potential function can be defined as the multiplication of the centrifugal
force with the associated axial displacement. Such a displacement can be calculated by assuming
that blade length does not change and the free end of the blade must move closer to the fixed end
when the blade bends [30]. In this case, both the flapwise deflection and the edgewise deflection
contribute to the axial displacement, 𝑣(𝑥, 𝑡). The displacement can be calculated as

69
𝑣(𝑥, 𝑡) =1
2∫ [𝜕𝑢𝑓
𝑙 (�̃�, 𝑡)
𝜕�̃�]
2
𝑑�̃�
𝑥
0
+1
2∫ [𝜕𝑢𝑒
𝑙 (�̃�, 𝑡)
𝜕�̃�]
2
𝑑�̃�
𝑥
0
=1
2∫[𝜕𝑢𝑓
𝑔
𝜕�̃�]
2
𝑑�̃�
𝑥
0
𝑐𝑜𝑠2𝜃𝑡 +1
2∫ [𝜕𝑢𝑒
𝑔
𝜕�̃�]
2
𝑑�̃�
𝑥
0
𝑠𝑖𝑛2𝜃𝑡
+∫𝜕𝑢𝑓
𝑔
𝜕�̃�·𝜕𝑢𝑒
𝑔
𝜕�̃�𝑑�̃�
𝑥
0
𝑠𝑖𝑛𝜃𝑡𝑐𝑜𝑠𝜃𝑡
+1
2∫ [𝜕𝑢𝑓
𝑔
𝜕�̃�]
2
𝑑�̃�
𝑥
0
𝑠𝑖𝑛2𝜃𝑡 +1
2∫ [𝜕𝑢𝑒
𝑔
𝜕�̃�]
2
𝑑�̃�
𝑥
0
𝑐𝑜𝑠2𝜃𝑡
−∫𝜕𝑢𝑓
𝑔
𝜕�̃�·𝜕𝑢𝑒
𝑔
𝜕�̃�𝑑�̃�
𝑥
0
𝑠𝑖𝑛𝜃𝑡𝑐𝑜𝑠𝜃𝑡
(3.18)
Therefore, the centrifugal potential energy in a local blade element 𝑛 is
𝑉𝑎𝑛 = ∫𝐹𝑐 · 𝑣(𝑥, 𝑡)𝑑𝑥
𝑙
0
=1
2𝐶𝑐𝜌�̇�
2∫(∫[𝜕𝑢𝑓
𝑔
𝜕�̃�]
2
𝑑�̃�
𝑥
0
𝑐𝑜𝑠2𝜃𝑡 +∫[𝜕𝑢𝑒
𝑔
𝜕�̃�]
2
𝑑�̃�
𝑥
0
𝑠𝑖𝑛2𝜃𝑡)
𝑙
0
𝑑𝑥
−1
2𝜌�̇�2(𝑟 + (𝑛 − 1)𝑙)∫𝑥(∫[
𝜕𝑢𝑓𝑔
𝜕�̃�]
2
𝑑�̃�
𝑥
0
𝑐𝑜𝑠2𝜃𝑡
𝑙
0
+∫[𝜕𝑢𝑒
𝑔
𝜕�̃�]
2
𝑑�̃�
𝑥
0
𝑠𝑖𝑛2𝜃𝑡)𝑑𝑥
−1
4𝜌�̇�2∫𝑥2(∫ [
𝜕𝑢𝑓𝑔
𝜕�̃�]
2
𝑑�̃�
𝑥
0
𝑐𝑜𝑠2𝜃𝑡 +∫[𝜕𝑢𝑒
𝑔
𝜕�̃�]
2
𝑑�̃�
𝑥
0
𝑠𝑖𝑛2𝜃𝑡)
𝑙
0
𝑑𝑥
+1
2𝐶𝑐𝜌�̇�
2∫(∫[𝜕𝑢𝑒
𝑔
𝜕�̃�]
2
𝑑�̃�
𝑥
0
𝑐𝑜𝑠2𝜃𝑡 +∫[𝜕𝑢𝑓
𝑔
𝜕�̃�]
2
𝑑�̃�
𝑥
0
𝑠𝑖𝑛2𝜃𝑡)
𝑙
0
𝑑𝑥
(3.19)

70
−1
2𝜌�̇�2(𝑟 + (𝑛 − 1)𝑙)∫𝑥(∫[
𝜕𝑢𝑒𝑔
𝜕�̃�]
2
𝑑�̃�
𝑥
0
𝑐𝑜𝑠2𝜃𝑡
𝑙
0
+∫[𝜕𝑢𝑓
𝑔
𝜕�̃�]
2
𝑑�̃�
𝑥
0
𝑠𝑖𝑛2𝜃𝑡)𝑑𝑥
−1
4𝜌�̇�2∫𝑥2(∫ [
𝜕𝑢𝑒𝑔
𝜕�̃�]
2
𝑑�̃�
𝑥
0
𝑐𝑜𝑠2𝜃𝑡 +∫[𝜕𝑢𝑓
𝑔
𝜕�̃�]
2
𝑑�̃�
𝑥
0
𝑠𝑖𝑛2𝜃𝑡)
𝑙
0
𝑑𝑥
The potential energy due to gravity is associated with the blade deformation in axial and transverse
directions in the rotor plane. Deformations in these two directions can be obtained by projecting
blade flapwise and edgewise deflection onto the rotor plane. Taking the undeformed state as zero
datum, the potential energy in a local blade element 𝑛 can be expressed as
𝑉𝑔𝑛 = −𝜌𝑔∫𝑥𝑣(𝑥, 𝑡)𝑑𝑥
𝑙
0
· 𝑠𝑖𝑛𝜑 + 𝜌𝑔∫𝑢𝑓𝑙𝑑𝑥
𝑙
0
· 𝑐𝑜𝑠𝜑𝑠𝑖𝑛𝜃 + 𝜌𝑔∫𝑢𝑒𝑙𝑑𝑥
𝑙
0
· 𝑐𝑜𝑠𝜑𝑐𝑜𝑠𝜃
= −1
2𝜌𝑔𝑠𝑖𝑛𝜑(∫𝑥∫ [
𝜕𝑢𝑓𝑔
𝜕�̃�]
2
𝑑�̃�
𝑥
0
𝑑𝑥 · 𝑐𝑜𝑠2𝜃𝑡
𝑙
0
+∫𝑥∫[𝜕𝑢𝑒
𝑔
𝜕�̃�]
2
𝑑�̃�
𝑥
0
𝑑𝑥 · 𝑠𝑖𝑛2𝜃𝑡
𝑙
0
)
+𝜌𝑔∫𝑢𝑓𝑔𝑑𝑥 ·
𝑙
0
𝑐𝑜𝑠𝜑 𝑐𝑜𝑠𝜃𝑡𝑠𝑖𝑛𝜃 + 𝜌𝑔∫𝑢𝑒𝑔𝑑𝑥 ·
𝑙
0
𝑐𝑜𝑠𝜑 𝑠𝑖𝑛𝜃𝑡 𝑠𝑖𝑛𝜃
−1
2𝜌𝑔𝑠𝑖𝑛𝜑(∫𝑥∫ [
𝜕𝑢𝑒𝑔
𝜕�̃�]
2
𝑑�̃�
𝑥
0
𝑑𝑥 · 𝑐𝑜𝑠2𝜃𝑡
𝑙
0
+∫𝑥∫ [𝜕𝑢𝑓
𝑔
𝜕�̃�]
2
𝑑�̃�
𝑥
0
𝑑𝑥 · 𝑠𝑖𝑛2𝜃𝑡
𝑙
0
)
−𝜌𝑔∫𝑢𝑓𝑔𝑑𝑥 ·
𝑙
0
𝑐𝑜𝑠𝜑 𝑠𝑖𝑛𝜃𝑡 𝑐𝑜𝑠𝜃 + 𝜌𝑔∫𝑢𝑒𝑔𝑑𝑥 ·
𝑙
0
𝑐𝑜𝑠𝜑 𝑐𝑜𝑠𝜃𝑡 𝑐𝑜𝑠𝜃
(3.20)
where 𝑔 is constant acceleration due to gravity.
Finally, assembling all energy expressions in the local blade elements gives the total kinetic
energy and potential energy for the blade/rotor system

71
𝑇 = ∑[𝑇𝑏
𝑛]𝑗𝑚
𝑛=1
+ 𝑇ℎ (3.21)
𝑉 = ∑(𝑉𝑠
𝑛 + 𝑉𝑔𝑛 + 𝑉𝑎
𝑛)
𝑚
𝑛=1
(3.22)
where 𝑗 = 1,2,3 represents the number of the blade. Eq. (3.21) represents the total kinetic energy
that includes the kinetic energy of blade deflection and hub rotation, while Eq. (3.22) represents
the total potential energy that contains strain potential, gravity potential, and centrifugal potential.
Discretizing those energy terms with the finite element method can help derive the final governing
ordinary differential equations for the rotor blade system.
3.3.3 The Finite Element Discretization
The finite element method will be utilized to discretize the wind turbine blade. As explained in
Section 3.3.1, the deformations are represented in terms of the nodal degrees of freedom in finite
element method. Using Eq. (3.6), the spatial and time derivatives of the elastic deformation 𝑢(𝑥, 𝑡)
can be represented in the following form
𝑢𝑓′ (𝑥, 𝑡) = [𝑁′(𝑥)]𝒒𝒇, 𝑢𝑒
′ (𝑥, 𝑡) = [𝑁′(𝑥)]𝒒𝒆 (3.23)
𝑢𝑓′′(𝑥, 𝑡) = [𝑁′′(𝑥)]𝒒𝒇, 𝑢𝑒
′′(𝑥, 𝑡) = [𝑁′′(𝑥)]𝒒𝒆 (3.24)
�̇�𝑓(𝑥, 𝑡) = [𝑁(𝑥)]�̇�𝒇, �̇�𝑒(𝑥, 𝑡) = [𝑁(𝑥)]�̇�𝒆 (3.25)
where ()′ and ()′′ indicates the derivative with respect to space while ()̇ signifies the time
derivative. Eqs. (3.23-3.25) will be employed to discretize the equations derived in Section 3.4.
Substituting Eq. (3.25) into Eq. (3.13), the blade kinetic energy in a local blade element 𝑛
can be written as:

72
𝑇𝑏𝑛 =
1
2𝜌∫(𝑟 + (𝑛 − 1)𝑙 + 𝑥)2�̇�2𝑑𝑥
𝑙
0
+1
2𝜌�̇�𝒇∫[𝑁(𝑥)]
2𝑑𝑥
𝑙
0
�̇�𝒇𝑻
+1
2𝜌�̇�𝒆∫[𝑁(𝑥)]
2𝑑𝑥
𝑙
0
�̇�𝒆𝑻
+𝜌∫(𝑟 + (𝑛 − 1)𝑙 + 𝑥)�̇� · 𝑠𝑖𝑛𝜃 · 𝑐𝑜𝑠𝜃𝑡[𝑁(𝑥)]𝑑𝑥
𝑙
0
�̇�𝒇
−𝜌∫(𝑟 + (𝑛 − 1)𝑙 + 𝑥)�̇� · 𝑐𝑜𝑠𝜃 · 𝑠𝑖𝑛𝜃𝑡[𝑁(𝑥)]𝑑𝑥
𝑙
0
�̇�𝒇
+𝜌∫(𝑟 + (𝑛 − 1)𝑙 + 𝑥)�̇� · 𝑠𝑖𝑛𝜃 · 𝑠𝑖𝑛𝜃𝑡[𝑁(𝑥)]𝑑𝑥
𝑙
0
�̇�𝒆
+𝜌∫(𝑟 + (𝑛 − 1)𝑙 + 𝑥)�̇� · 𝑐𝑜𝑠𝜃 · 𝑐𝑜𝑠𝜃𝑡[𝑁(𝑥)]𝑑𝑥
𝑙
0
�̇�𝒆
(3.26)
where ()𝑇 represents the transpose.
Substituting Eq. (3.24) into Eq. (3.15), the bending strain energy of element 𝑛 can be
represented as
𝑉𝑠𝑛 =
1
2𝒒𝒇∫[𝑁
′′(𝑥)]2𝑑𝑥
𝑙
0
𝒒𝒇𝑻 ∙ (𝐸𝐼𝑓 · 𝑐𝑜𝑠
2𝜃𝑡 + 𝐸𝐼𝑒 · 𝑠𝑖𝑛2𝜃𝑡)
+1
2𝒒𝒆∫[𝑁
′′(𝑥)]2𝑑𝑥
𝑙
0
𝒒𝒆𝑻 ∙ (𝐸𝐼𝑓 · 𝑠𝑖𝑛
2𝜃𝑡 + 𝐸𝐼𝑒 · 𝑐𝑜𝑠2𝜃𝑡)
+𝒒𝒇∫[𝑁′′(𝑥)]2𝑑𝑥
𝑙
0
𝒒𝒆𝑻 · (𝐸𝐼𝑓 − 𝐸𝐼𝑒) · 𝑠𝑖𝑛𝜃𝑡 · 𝑐𝑜𝑠𝜃𝑡
(3.27)

73
Similarly, substituting Eqs. (3.6) and (3.23) into Eqs. (3.19) and (3.20), the centrifugal potential
and gravity potential of element 𝑛 can be represented as
𝑉𝑎𝑛 =
1
2𝐶𝑐𝜌�̇�
2∫𝒒𝒇(∫[𝑁′(�̃�)]2𝑑�̃�
𝑥
0
𝒒𝒇𝑻𝑐𝑜𝑠2𝜃𝑡 + 𝒒𝒆∫[𝑁
′(�̃�)]2𝑑�̃�
𝑥
0
𝒒𝒆𝑻𝑠𝑖𝑛2𝜃𝑡)
𝑙
0
𝑑𝑥
−1
2𝜌�̇�2(𝑟 + (𝑛 − 1)𝑙)∫𝑥𝒒𝒇(∫[𝑁
′(�̃�)]2𝑑�̃�
𝑥
0
𝒒𝒇𝑻𝑐𝑜𝑠2𝜃𝑡
𝑙
0
+ 𝒒𝒆∫[𝑁′(�̃�)]2𝑑�̃�
𝑥
0
𝒒𝒆𝑻𝑠𝑖𝑛2𝜃𝑡)𝑑𝑥
−1
4𝜌�̇�2∫𝑥2(𝒒𝒇∫[𝑁
′(�̃�)]2𝑑�̃�
𝑥
0
𝒒𝒇𝑻𝑐𝑜𝑠2𝜃𝑡 + 𝒒𝒆∫[𝑁
′(�̃�)]2𝑑�̃�
𝑥
0
𝒒𝒆𝑻𝑠𝑖𝑛2𝜃𝑡)
𝑙
0
𝑑𝑥
+1
2𝐶𝑐𝜌�̇�
2∫(𝒒𝒆∫[𝑁′(�̃�)]2𝑑�̃�
𝑥
0
𝒒𝒆𝑻𝑐𝑜𝑠2𝜃𝑡 + 𝒒𝒇∫[𝑁
′(�̃�)]2𝑑�̃�
𝑥
0
𝒒𝒇𝑻𝑠𝑖𝑛2𝜃𝑡)
𝑙
0
𝑑𝑥
−1
2𝜌�̇�2(𝑟 + (𝑛 − 1)𝑙)∫𝑥(𝒒𝒆∫[𝑁
′(�̃�)]2𝑑�̃�
𝑥
0
𝒒𝒆𝑻𝑐𝑜𝑠2𝜃𝑡
𝑙
0
+ 𝒒𝒇∫[𝑁′(�̃�)]2𝑑�̃�
𝑥
0
𝒒𝒇𝑻𝑠𝑖𝑛2𝜃𝑡)𝑑𝑥
−1
4𝜌�̇�2∫𝑥2(𝒒𝒆∫[𝑁
′(�̃�)]2𝑑�̃�
𝑥
0
𝒒𝒆𝑻𝑐𝑜𝑠2𝜃𝑡 + 𝒒𝒇∫[𝑁
′(�̃�)]2𝑑�̃�
𝑥
0
𝒒𝒇𝑻𝑠𝑖𝑛2𝜃𝑡)
𝑙
0
𝑑𝑥
(3.28)

74
𝑉𝑔𝑛 = −
1
2𝜌𝑔𝑠𝑖𝑛𝜑(∫𝑥𝒒𝒇∫[𝑁
′(�̃�)]2𝑑�̃�
𝑥
0
𝒒𝒇𝑻𝑑𝑥 · 𝑐𝑜𝑠2𝜃𝑡
𝑙
0
+∫𝑥𝒒𝒆∫[𝑁′(�̃�)]2𝑑�̃�
𝑥
0
𝒒𝒆𝑻𝑑𝑥 · 𝑠𝑖𝑛2𝜃𝑡
𝑙
0
)
+𝜌𝑔∫[𝑁(𝑥)]𝑑𝑥 ·
𝑙
0
𝒒𝒇𝑐𝑜𝑠𝜑 𝑐𝑜𝑠𝜃𝑡𝑠𝑖𝑛𝜃 + 𝜌𝑔∫[𝑁(𝑥)]𝑑𝑥 ·
𝑙
0
𝒒𝒆𝑐𝑜𝑠𝜑 𝑠𝑖𝑛𝜃𝑡 𝑠𝑖𝑛𝜃
−1
2𝜌𝑔𝑠𝑖𝑛𝜑(∫𝑥𝒒𝒆∫[𝑁
′(�̃�)]2𝑑�̃�
𝑥
0
𝒒𝒆𝑻𝑑𝑥 · 𝑐𝑜𝑠2𝜃𝑡
𝑙
0
+∫𝑥𝒒𝒇∫[𝑁′(�̃�)]2𝑑�̃�
𝑥
0
𝒒𝒇𝑻𝑑𝑥 · 𝑠𝑖𝑛2𝜃𝑡
𝑙
0
)
−𝜌𝑔∫[𝑁(𝑥)]𝑑𝑥 ·
𝑙
0
𝒒𝒇𝑐𝑜𝑠𝜑 𝑠𝑖𝑛𝜃𝑡 𝑐𝑜𝑠𝜃 + 𝜌𝑔∫[𝑁(𝑥)]𝑑𝑥 ·
𝑙
0
𝒒𝒆𝑐𝑜𝑠𝜑 𝑐𝑜𝑠𝜃𝑡 𝑐𝑜𝑠𝜃
(3.29)
Eqs. (3.26-3.29) express the kinetic energy and potential energy in terms of shape function and
nodal coordinates. Using these expressions, the ordinary differential equations for a blade element
can be derived. The finite element model can be obtained by expanding the equations to the whole
structure.
3.3.4 Equations of Motion
Following the Lagrangian approach, equations of motion can be written in terms of generalized
coordinates as defined in Eq. (3.6). The dynamics equations for a blade element can be written as:
{𝑴𝒓𝒓 𝑴𝒓𝒒
𝑴𝒒𝒓 𝑴𝒒𝒒} {�̈��̈�} + {
𝟎 �̅�𝒓𝟎 �̅�
} {𝜑𝒒} + {
𝑵𝒓𝑵𝒒} = {
𝝉�̅�} (3.30)
where

75
𝒒 = [𝒒𝒇𝒍 𝒒𝒆
𝒍 ]𝑇
�̅� = [𝑭𝒇𝒍 𝑭𝒆
𝒍 ]𝑇
𝑴𝒓𝒓 = 𝐽ℎ + 𝑨 − 𝒒𝑻�̅�𝒒
𝑴𝒓𝒒 = [𝑴𝒓𝒒𝒇 𝑴𝒓𝒒𝒆]
𝑴𝒒𝒓 = 𝑴𝒓𝒒𝑻
𝑴𝒒𝒒 = [𝑴 𝟎𝟎 𝑴
]
�̅� = [𝑩 𝟎𝟎 𝑩
]
�̅� = [
�̅�𝒇𝒇 �̅�𝒇𝒆
�̅�𝒆𝒇 �̅�𝒆𝒆]
𝑵𝒒 = [𝑵𝒇 𝑵𝒆]𝑇
�̅�𝒓 = [𝑲𝒓𝒇 𝑲𝒓𝒆]
𝑴𝒓𝒒𝒇 = 𝑠𝑖𝑛𝜃 · 𝑐𝑜𝑠𝜃𝑡𝑬 − 𝑐𝑜𝑠𝜃 · 𝑠𝑖𝑛𝜃𝑡𝑬
𝑴𝒓𝒒𝒆 = 𝑠𝑖𝑛𝜃 · 𝑠𝑖𝑛𝜃𝑡𝑬 + 𝑐𝑜𝑠𝜃 · 𝑐𝑜𝑠𝜃𝑡𝑬
𝑲𝒓𝒇 = −𝑔𝑮𝑠𝑖𝑛𝜑 · 𝑠𝑖𝑛𝜃 · 𝑐𝑜𝑠𝜃𝑡 + 𝑔𝑮𝑠𝑖𝑛𝜑 · 𝑐𝑜𝑠𝜃 · 𝑠𝑖𝑛𝜃𝑡
𝑲𝒓𝒆 = −𝑔𝑮𝑠𝑖𝑛𝜑 · 𝑠𝑖𝑛𝜃 · 𝑠𝑖𝑛𝜃𝑡 − 𝑔𝑮𝑠𝑖𝑛𝜑 · 𝑐𝑜𝑠𝜃 · 𝑐𝑜𝑠𝜃𝑡
𝑵𝒓 = −{2�̇�𝒒
𝑻�̅�}�̇� −1
2𝜌𝑔𝑐𝑜𝑠𝜑𝒒𝑻𝑩2 · 𝒒
𝑵𝒇 = 𝑔𝑮𝑐𝑜𝑠𝜑 · 𝑠𝑖𝑛𝜃 · 𝑐𝑜𝑠𝜃𝑡 − 𝑔𝑮𝑐𝑜𝑠𝜑 · 𝑐𝑜𝑠𝜃 · 𝑠𝑖𝑛𝜃𝑡
𝑵𝒆 = 𝑔𝑮𝑐𝑜𝑠𝜑 · 𝑠𝑖𝑛𝜃 · 𝑠𝑖𝑛𝜃𝑡 + 𝑔𝑮𝑐𝑜𝑠𝜑 · 𝑐𝑜𝑠𝜃 · 𝑐𝑜𝑠𝜃𝑡
�̅�𝒇𝒇 = 𝑲𝒇𝑐𝑜𝑠
2𝜃𝑡 +𝑲𝒆𝑠𝑖𝑛2𝜃𝑡 + 𝜌�̇�
2𝐶𝑐𝑩1 − 𝜌�̇�2(𝑟 + 𝑛ℎ)𝑩2 −
1
2𝜌�̇�2𝑩3
− 𝑭𝑠𝑖𝑛𝜑 ∙ 𝑔

76
�̅�𝒆𝒆 = 𝑲𝒇𝑠𝑖𝑛
2𝜃𝑡 +𝑲𝒆𝑐𝑜𝑠2𝜃𝑡 + 𝜌�̇�
2𝐶𝑐𝑩1 − 𝜌�̇�2(𝑟 + 𝑛ℎ)𝑩2 −
1
2𝜌�̇�2𝑩3
− 𝑭𝑠𝑖𝑛𝜑 ∙ 𝑔
�̅�𝒇𝒆 = 𝑲𝒇𝑠𝑖𝑛𝜃𝑡𝑐𝑜𝑠𝜃𝑡 −𝑲𝒆𝑠𝑖𝑛𝜃𝑡𝑐𝑜𝑠𝜃𝑡
�̅�𝒆𝒇 = 𝑲𝒇𝑠𝑖𝑛𝜃𝑡𝑐𝑜𝑠𝜃𝑡 −𝑲𝒆𝑠𝑖𝑛𝜃𝑡𝑐𝑜𝑠𝜃𝑡
𝑬 = 𝜌∫(𝑟 + 𝑥)[𝑁(𝑥)]𝑑𝑥
𝑙
0
Eq. (3.30) describes the motion of a blade in its local coordinate frame that can be transformed to
the global frame. 𝑭𝒇𝒍 and 𝑭𝒆
𝒍 represent the normal and tangential forces associated with the
generalized coordinates. The normal force is responsible for the blade flapwise deflection while
the tangential force contributes to the edgewise deflection. In Eq. (3.30), 𝑴𝒓𝒓 represents the
rotational mass matrix on a local blade element, 𝑴𝒓𝒒 and 𝑴𝒒𝒓 represent the coupling matrix
between blade rotational and elastic degree of freedom, 𝑴𝒒𝒒 represents elastic mass matrix. �̅�𝒓 is
the stiffness matrix associated with rotational degree of freedom while �̅� is the generalized
stiffness matrix. 𝑵𝒓 and 𝑵𝒒 are nonlinear terms in blade rotational motion and elastic body
deformation on a local blade element. 𝝉 and �̅� represent the individual blade torque and nodal
force vector on a local blade element, respectively. They can be considered as the input to the
system. The nodal force �̅� is obtained by multiplying applied forces with the shape functions.
To express the aerodynamics forces in the configuration space of the generalized
coordinates, determination of the generalized forces is required. By applying the principle of
virtual work, the nodal force vector can be expressed as

77
�̅� = ∫𝑭[𝑁(𝑥)]dx
𝒍
𝟎
(3.31)
Assembling all element equations will form a global equation of motion. The dynamic equations
for a blade can be expressed as
{𝑴𝒓𝒓𝜮 𝑴𝒓𝒒𝜮
𝑴𝒒𝒓𝜮 𝑴𝒒𝒒𝜮} {�̈�𝜮�̈�𝜮} + {
𝟎 �̅�𝒓𝜮𝟎 �̅�𝜮
} {𝜑𝜮𝒒𝜮} + {
𝑵𝒓𝜮𝑵𝒒𝜮
} = {𝝉𝜮�̅�𝜮} (3.32)
The symbol ‘𝛴’ is used to symbolize assembled quantities over elements in a single blade. Our
blade model accounts for the effects of gravity and centrifugal stiffening arising from the rotating
blades. In addition, the coupling terms capturing the interaction between the rotor and blades are
included as well. The coupling effects are the unique features of our model. Expressions for Eqs.
(3.30) show that the significance of the coupling is influenced by the blade mass properties, blade
deflection, and rotor speed. Providing such details in a model can lead to increased sensitivities of
the model in applications to, for instance, assessment of structural health condition. They also
provide insights in torsional vibration analysis and inform a better wind turbine design.
Extending Eq. (3.32) from one blade to three blades, the equations representing the total
three blades can be obtained as:
{
𝑴𝒓𝒓𝜮 𝑴𝒓𝒒𝜮
1 𝑴𝒓𝒒𝜮2 𝑴𝒓𝒒𝜮
3
𝑴𝒒𝒓𝜮1 𝑴𝒒𝒒𝜮
1 𝟎 𝟎
𝑴𝒒𝒓𝜮2 𝟎 𝑴𝒒𝒒𝜮
2 𝟎
𝑴𝒒𝒓𝜮3 𝟎 𝟎 𝑴𝒒𝒒𝜮
3}
{
�̈�𝜮�̈�𝜮1
�̈�𝜮2
�̈�𝜮3}
+
{
𝟎 𝑲𝑟𝜮
1 𝑲𝑟𝜮2 𝑲𝑟𝜮
3
𝟎 �̅�𝜮1 𝟎 𝟎
𝟎 𝟎 �̅�𝜮2 𝟎
𝟎 𝟎 𝟎 �̅�𝜮3}
{
𝜑𝜮𝒒𝜮1
𝒒𝜮2
𝒒𝜮3}
+
{
�̅�𝒓𝜮𝑵𝒒𝜮1
𝑵𝒒𝜮2
𝑵𝒒𝜮3}
=
{
𝑻𝒂�̅�𝜮1
�̅�𝜮2
�̅�𝜮3}
(3.33)

78
where superscript 𝑗 is used to represent blade 𝑗. 𝑻𝒂 is the rotor torque and is the sum of three blade
torques
𝑻𝒂 = 𝝉𝜮𝟏 + 𝝉𝜮
𝟐 + 𝝉𝜮3 (3.34)
Eq. (3.33) defines the blade/rotor behavior in relating to the aerodynamic loads caused by wind
flow with all 3 blades included. In the equation, 𝑻𝒂 and �̅�𝜮𝑗 (𝑗 = 1,2,3) represent the total
aerodynamic loads acting on the blades. These loads are influenced not only by wind flow
condition and blade airfoil shape and speed, but also by blade vibration. Hence, the left and right
side of the Eq. (3.33) are not independent. This dependency explains the on-going intense research
on fluid-structure interaction, which receives lots of attention in the literature [76-78]. For wind
turbine operation, a torque controller and pitch angle changes are necessary to limit the rotor speed
in high wind condition to protect the turbine system from potential damage.
Blade motion is resisted by the structural damping, which can be considered as an internal
resistance opposing the rate of strain. To account for the blade material’s damping, we use the
classical Rayleigh damping model, and Eq. (3.33) becomes
{
𝑴𝒓𝒓𝜮 𝑴𝒓𝒒𝜮
1 𝑴𝒓𝒒𝜮2 𝑴𝒓𝒒𝜮
3
𝑴𝒒𝒓𝜮1 𝑴𝒒𝒒𝜮
1 𝟎 𝟎
𝑴𝒒𝒓𝜮2 𝟎 𝑴𝒒𝒒𝜮
2 𝟎
𝑴𝒒𝒓𝜮3 𝟎 𝟎 𝑴𝒒𝒒𝜮
3}
{
�̈�𝜮�̈�𝜮1
�̈�𝜮2
�̈�𝜮3}
+
{
𝟎 𝟎 𝟎 𝟎𝟎 𝑪𝒒𝒒𝜮
1 𝟎 𝟎
𝟎 𝟎 𝑪𝒒𝒒𝜮2 𝟎
𝟎 𝟎 𝟎 𝑪𝒒𝒒𝜮3}
{
�̇�𝜮�̇�𝜮1
�̇�𝜮2
�̇�𝜮3}
+
{
𝟎 𝑲𝑟𝜮
1 𝑲𝑟𝜮2 𝑲𝑟𝜮
3
𝟎 �̅�𝜮1 𝟎 𝟎
𝟎 𝟎 �̅�𝜮2 𝟎
𝟎 𝟎 𝟎 �̅�𝜮3}
{
𝜑𝜮𝒒𝜮1
𝒒𝜮2
𝒒𝜮3}
+
{
�̅�𝒓𝜮𝑵𝒒𝜮1
𝑵𝒒𝜮2
𝑵𝒒𝜮3}
=
{
𝑻𝒂�̅�𝜮1
�̅�𝜮2
�̅�𝜮3}
(3.35)
Eq. (3.35) describes the final ordinary differential equations for the wind turbine rotor/blade
system. Many degrees of freedom are involved in the model, and the total number depends on how

79
many blade elements are employed to discretize the blade. If we divide the blade into 𝑚 elements,
the number of degrees of freedom in blade elastic deflection for a blade is 4𝑚, 2𝑚 in the flapwise
direction and 2𝑚 in the edgewise direction. This number will increase to 12𝑚 if all three blades
are considered. Including the one degree of freedom in blade rotational motion, there are 12𝑚 + 1
degrees of freedom in the equations in total. Eq. (3.35) represents an integrated aeroelastic model.
The left and right side of the equation describes the structural dynamics and aerodynamic loads,
respectively.
3.4 The Assumed Mode Model
We mentioned that another option to discretize the wind turbine blade structure is by using the
assumed mode method. In this method, the blade is discretized based on the natural vibration
modes and is continuous in space. The solution of the blade deflection 𝑢(𝑥, 𝑡) is assumed to be in
the following form
𝑢(𝑥, 𝑡) =∑𝜙𝑖(𝑥)𝑞𝑖(𝑡)
𝑛
𝑖=1
(3.36)
where 𝜙𝑖(𝑥) and 𝑞𝑖(𝑡) are trial functions and generalized coordinates respectively. Trial functions
are determined such that they satisfy the geometric boundary conditions of the problem. They
represent the mode shapes for the vibration modes. The generalized coordinates are the coordinates
that corresponding to the associated mode shapes.
The procedure of deriving the equations of motion are similar to that in the finite element
method. By employing Eq. (3.36) in conjunction with Euler–Lagrange’s approach, the governing
equations for a wind turbine blade can be represented as
{𝑴𝝋𝝋 𝑴𝝋𝒒
𝑴𝒒𝝋 𝑴𝒒𝒒} {�̈��̈�} + {
𝟎 𝟎𝟎 �̅�
} {�̇��̇�} + {
𝟎 𝟎𝟎 �̅�
} {𝜑𝒒} + {
𝑵𝝋𝑵𝒒} = {
𝑇𝑎�̅�} (3.37)

80
Physical meanings of the terms in Eq. (3.37) are similar to that in the finite element model. The
difference is that 𝒒 here represents the generalized coordinates for the vibration modes rather than
the nodes as appears in the finite element model. The model developed by the assumed mode
method is relatively simpler in mathematical form, and thus the associated program can run faster.
The analytical expressions enable us to analyze the cause and effect of the system. The drawback
is that matching the structural part with the aerodynamic part is difficult. The reason is that the
aerodynamic model, such as BEMT based model or GDW based model, is discontinuous in space.
However, we can obtain a fluid-structure model by approximating the aerodynamic loads using
polynomial functions. Such a model can provide guidance in the control problems of wind
turbines.
In conclusion, this chapter derives the structural dynamics equations for a wind turbine
rotor-blade system by adopting the Euler-Lagrange’s approach. For the convenience of obtaining
the solutions, the equations have been discretized by using both the finite element method and the
assumed mode method. The structural dynamics can be combined with the aerodynamic loads to
obtain an integrated fluid-structure model. The integrated model will be verified and validated in
the next chapter.

81
Chapter Four: Model Validation and Analysis
To validate the proposed wind turbine rotor-blade model, we conducted numerical simulations and
compared results with those generated by the FAST (Fatigue, Aerodynamics, Structure, and
Turbulence) software package. FAST was developed by the National Renewable Energy
Laboratory and is one of the commonly used for wind turbine simulation. It has been validated
against the experimental data [79] and is one of the best benchmark references for comparison. It
is an authoritative wind turbine simulation tool with high fidelity [79]. In FAST, aerodynamic
forces are determined through blade element momentum based method. Blade deflects in both
flapwise and edgewise deflection. Blade torsional motion is not considered. Effects of centrifugal
stiffening and gravity are included while coupling between blade rotational motion and elastic
vibration is not captured. The finite element model described by Eq. (3.35) is used to compare
against FAST so that the load variations along the blade length can be accommodated. The
coupling terms are eliminated during the comparison. Other research such as the work reported in
[80], has used FAST as a tool to verify their aerodynamic model. We use a 1.5 MW baseline wind
turbine, whose physical and geometric parameters are given in Table 4.1. The generator torque for
the 1.5 MW baseline wind turbine with different operating regions is shown in Fig. 4.1. Distributed
blade properties such as chord length, structural twist, blade density, and blade stiffness are
provided in Appendix C. Parameters such as blade density, stiffness, and twist angle is different
for each element along the length dimension. Therefore, the blade is divided into 15 elements in
the numerical simulation to accommodate parameter variations. We consider wind speed as input
and rotor speed and blade deflection as output. To verify the model, energy balance between the
input and the output is monitored and confirmed. We compare results for both steady and unsteady

82
flow conditions between our model and FAST. The model is further verified by simulating known
phenomena such as centrifugal stiffening and gravity’s effect.
Upon a successful model validation, we added the coupling terms to investigate the effects
of blade vibrations on rotor movement. The coupling terms are the unique features of our model.
Although the literature shows that wind turbine rotors experience oscillations [23], the cause of
such behavior has not been investigated thoroughly [22]. The inclusion of the coupling terms in
the wind turbine dynamics equations helps us understand the phenomenon of rotor oscillation due
to blade vibration and possibly diagnose faults. In this chapter, the significance of the coupling
terms is demonstrated by investigating its role in detecting possible blade faults such as ice
accretion. To gain a better understanding of the interaction between wind loads and structural
motion, we compared the wind turbine behavior with and without fluid-structure interaction. We
also used the blade bilinear stiffness as an example to illustrate the importance of fluid-structure
interaction in detecting structural faults from rotor vibrational signals. In addition, aeroelastic
responses with and without wind shear are compared as a step to understanding the effect of
different wind profiles on turbine behavior.
Table 4.1. Characteristics of the 1.5 MW baseline wind turbine
Power Output 1.5 MW
Hub Height 84 m
Rotor Diameter 70 m
Number of Blades 3
Cut in wind speed 5 m/s
Cut out wind speed 25 m/s

83
Figure 4.1. Operating regions for the 1.5MW baseline wind turbine
4.1 Solution Algorithm
In wind energy harvesting, wind blows onto turbine blades, which drive a rotor and subsequently
the generator while also causing vibration of the blades. Therefore, we consider wind speed as the
input while rotor speed and blade deformations as the output. We are solving the forward problem,
i.e., calculating the output by knowing the input. Interaction between the fluid and structure is
enabled through the aerodynamic loads. Fig. 4.2 shows a flowchart of the algorithm to calculate
rotor speed and blade deflection from Eq. (3.35) in Chapter 3 given the system initial conditions
and wind speed. Initial conditions include the blade azimuth position or rotor position, rotor speed,
blade deflection and velocity. Setting the initial rotor speed to zero is not recommended as it can
cause singularity problem in the aerodynamic load calculation. The reason is that a zero rotor speed
will result in an unreasonable value in the inflow angle calculation. After that, mass and stiffness
matrices are calculated, along with aerodynamic forces. Then, the global equations are obtained
by assembling the local element matrices. Next, �̈� and �̈� are calculated from Eq. (3.35) and are
1000 1500 2000 25002000
3000
4000
5000
6000
7000
8000
9000
Generator speed(rpm)
Genera
tor
torq
ue(N
m)
Region 2
Region 3

84
integrated to generate velocity and further displacements. The process continues until the final
time is reached. Since the time constants in the model vary by several orders of magnitude, the
ratio between the largest and smallest eigenvalue in the system is large. Such a difference
contributes to “stiff” differential equation, which makes the equation difficult to solve in the region
that exists rapid variation. To solve the stiff differential equations associated with the ill-
conditioned matrices in our model, the MATLAB function “ode15s” is used.
Integrate
Start
0t
Initialization
Read blade geometry, wind speed
Determine local structure matrix
Determine global equation
Solve , from equation (3.35)
ft t End
Determine local aerodynamic forces
t t t
Structural Calculation Aerodynamic Calculation
Figure 4.2. Computational algorithm to solve equation

85
4.2 Model Validation
We verify our model by checking the energy balance of the system and comparing our results with
those generated by FAST. Both the steady and unsteady wind flow conditions are investigated
during the validation process to ensure the accuracy and correctness of the proposed model.
4.2.1 Energy Check
Checking the energy balance between the input and the output is a necessary, but not sufficient
way to verify the accuracy of the model [81, 82]. The solution of the model can be verified if the
energy difference is balanced, meaning that the energy drift of the system is within an acceptable
range. For our proposed model, the external force applied to the system are the aerodynamic forces,
therefore the input energy can be obtained by integrating the input power over time. The output
energy consists of kinetic energy and potential energy. Part of the input energy is consumed by the
damping in the system. Fig. 4.3 illustrates the error in the energy balance between the input and
output for both steady and unsteady flow cases. The peak value of the steady and unsteady energy
drift is 7 × 10−4 J and 9 × 10−5 J, respectively. Given the fact that the absolute error tolerance in
ode15s is 10−6, these values can be considered as sufficiently negligible to prove the correctness
of the calculation.

86
(a)
(b)
Figure 4.3. Energy drift for proposed model. (a) Steady case; (b) Unsteady case.
4.2.2 Steady Flow Comparison
This section compares the response to a steady wind flow between our model and FAST. By
steady, wind speed is assumed to be constant over time. It is also assumed to be normal to the
rotor plane. Rotor initial speed is set to 10 rpm. Figs. 4.4a, 4.4c and 4.4e show the response of
rotor speed and blade deflection when wind speed is 10 m/s with pitch angle fixed at 15 degrees,
while Figs. 4.4b, 4.4d and 4.4f show the response when wind speed is 15 m/s, also with 15 degrees
in pitch angle. The figures show that both rotor speed and the magnitude of blade deflection by the
two models agrees well at steady state in all cases. At higher wind speeds, the steady state rotor
speed and blade flapwise deflection increases. However, the edgewise deflection does not seem
to increase significantly with the increased wind speed. It amounts to less than 1% of the blade
length. The phase angles appear to be slightly different between the two models. Such differences
vary when we change damping parameters. However, exact matching would take significantly
more effort and is not the purpose of this study.
0 50 100 150 200-6.8
-6.6
-6.4
-6.2
-6
-5.8x 10
-4
Time(s)
Energ
y d
rift (
J)
0 50 100 150 200 250 300-10
-8
-6
-4
-2
0
2
4x 10
-5
Time(s)
Energ
y d
rift (
J)

87
(a)
(b)
(c)
(d)
(e)
(f)
Figure 4.4. Rotor speed and blade deflection under different steady wind speed. (a) Rotor speed when
wind speed is 10 m/s; (b) Rotor speed when wind speed is 15 m/s; (c) Blade tip flapwise deflection
when wind speed is 10 m/s; (d) Blade tip flapwise deflection when wind speed is 15 m/s; (e) Blade tip
edgewise deflection when wind speed is 10 m/s; (f) Blade tip edgewise deflection when wind speed 15
m/s.
0 50 100 1500
5
10
15
20
25
Time (sec)
Roto
r speed (
rpm
)
Our model
FAST
45 50 55
13.42
13.44
13.4613.48
0 50 100 1500
5
10
15
20
25
Time (sec)
Roto
r S
peed (
rpm
)
Our model
FAST
55 60 65
20.14
20.16
20.18
0 50 100 1500
0.5
1
1.5
2
Time (sec)
Bla
de T
ip F
lapw
ise D
efle
ctio
n (
m)
Our model
FAST
55 60 65
0.3
0.4
0.5
0 50 100 1500
0.5
1
1.5
2
Time (sec)
Bla
de T
ip F
lapw
ise D
efle
ctio
n (
m)
Our model
FAST
50 55
0.7
0.8
0.9
0 50 100 150
-0.2
-0.1
0
0.1
0.2
0.3
0.4
Time (sec)
Bla
de T
ip E
dgew
ise D
efle
ctio
n (
m)
Our model
FAST
72 74 76 78-0.2-0.1
00.1
0 50 100 150
-0.2
0
0.2
0.4
Time (sec)
Bla
de T
ip E
dgew
ise D
eflection (
m)
Our model
FAST
76 78 80
-0.2-0.1
00.1

88
4.2.3 Unsteady Flow Comparison
We now compare results for unsteady wind flow. In other words, wind speed is a function of time.
Again, wind speed is assumed to be normal to the rotor plane. Fig. 4.5a shows the wind speed at
hub height used in the simulation. It is generated by TurbSim [83], a software package for wind
speed generation. Figs. 4.5b, 4.5d and 4.5f show the rotor speed and blade flapwise deflection
when the pitch angle is 7.5 degrees. The two models give very similar results in magnitude and
trend. The difference in rotor speed and blade deflection between the two models is within 2% and
5% of the results generated by FAST, respectively. These results are better than the 8% difference
reported in [80], in which they also developed an aeroelastic model. The improvement is likely
due to the better suited aerodynamics model adopted in our model. To compare the proposed model
with FAST further, we change the pitch angle to 15 degrees and results are shown in Figs. 4.5c,
4.5e and 4.5g. The difference is within 1% of the reference results for rotor speed, and 4% for
blade deflection. Again, our model shows better matching to FAST than other models in the
literature [80] due to the aerodynamic model we adopted.
(a)
0 50 100 150 200 250 3006
8
10
12
14
16
Time (sec)
Win
d S
peed (
m/s
)

89
(b)
(c)
(d)
(e)
(f)
(g)
Figure 4.5. Rotor speed and blade deflection for unsteady wind speed. (a) Wind speed for simulation;
(b) Rotor speed when pitch angle is 7.5 degree; (c) Rotor speed when pitch angle is 15 degrees; (d)
Blade tip flapwise deflection when pitch angle is 7.5 degrees; (e) Blade tip flapwise deflection when
pitch angle is 15 degrees; (f) Blade tip edgewise deflection when pitch angle is 7.5 degrees; (g) Blade
tip edgewise deflection when pitch angle is 15 degrees.
0 50 100 150 200 250 3000
5
10
15
20
25
Time (sec)
Roto
r S
peed (
rpm
)
Our model
FAST170 175 180
15
16
17
0 50 100 150 200 250 3000
5
10
15
20
25
Time (sec)
Roto
r S
peed (
rpm
)
Our model
FAST
110 120
14
15
16
0 50 100 150 200 250 3000
0.5
1
1.5
2
2.5
Time (sec)
Bla
de T
ip F
lapw
ise D
efle
ctio
n (
m)
Our model
FAST
65 70 750.8
1
1.2
0 50 100 150 200 250 3000
0.5
1
1.5
2
2.5
Time (sec)
Bla
de T
ip F
lapw
ise D
efle
ctio
n (
m)
Our model
FAST
135 140 145
0.2
0.4
0 50 100 150 200 250 300
-0.2
-0.1
0
0.1
0.2
0.3
0.4
Time(s)
Bla
de T
ip F
lapw
ise D
efle
ctio
n(m
)
Our Model
FAST
150 155
-0.2-0.1
00.1
0 50 100 150 200 250 300
-0.2
-0.1
0
0.1
0.2
0.3
0.4
Time(s)
Bla
de T
ip E
dgew
ise D
efle
ctio
n (
m)
Our Model
FAST
145 150 155
-0.2-0.1
00.1

90
4.3 Centrifugal Stiffening
As a further way of verification, known phenomena are simulated to check whether the proposed
model can precisely predict such behaviors. The effect of “centrifugal stiffening” is simulated in
this section. This phenomenon indicates that the natural frequency for a rotating beam becomes
higher as the angular speed becomes higher. For wind turbine applications, the rotor speed is
different for different wind speed, therefore we compare the impacts of different wind speed on
the first three frequencies of the blade. To merely focus on the effects of centrifugal forces, gravity
is not included in the natural frequency calculation. Results for blade flapwise and edgewise
vibrational frequencies are given in Table 4.2-4.3. These tables imply that as a result of “centrifugal
stiffening”, the natural frequencies at different wind speeds are different. To be more specific, the
natural frequency increases as the wind speed increases. This observation is consistent with the
phenomenon described in the literature [20, 42]. The difference in natural frequencies are induced
by different bending stiffness, which are caused by different centrifugal forces. Increased
centrifugal forces contributes to the higher bending stiffness.
Table 4.2. Blade flapwise frequencies
Wind speed (m/s) 1st frequency (Hz) 2nd frequency (Hz) 3rd frequency (Hz)
8 1.2592 3.6319 7.8821
9 1.2682 3.6383 7.8891
10 1.2781 3.6455 7.8970
11 1.2889 3.6534 7.9057
12 1.3006 3.6621 7.9152
13 1.3133 3.6714 7.9255
14 1.3268 3.6815 7.9366
15 1.3411 3.6921 7.9484

91
Table 4.3. Blade edgewise frequencies
Wind speed (m/s) 1st frequency (Hz) 2nd frequency (Hz) 3rd frequency (Hz)
8 1.8477 6.2033 14.2956
9 1.8535 6.2077 14.3001
10 1.8601 6.2125 14.3051
11 1.8673 6.2179 14.3107
12 1.8752 6.2237 14.3167
13 1.8838 6.2300 14.3233
14 1.8930 6.2369 14.3305
15 1.9027 6.2442 14.3381
4.4 Effect of Gravity on Blade Vibration
Normally, constant forces should generate static deflection and systems do not vibrate if applied
forces are constant. However, as the results in Section 4.2.2 suggest, the wind turbine blade
vibrates even at the steady state condition when the wind speed is constant. Hence, a question
arises as to what is the cause of the vibration. The answer is that the vibration is significantly
related to the gravity. Fig. 4.6 shows the blade tip flapwise deflection with and without gravity.
The graph clearly shows that the blade virtually does not vibrate if gravity is not considered. On
the contrary, it vibrates in the case that gravity effects are added. This is because of the fact that
gravity affects the stiffness of the rotating blade, and can provide additional forces in the blade
elastic body motion. As the blade rotates, the effects of gravity on the blade stiffness and forces
vary periodically, depending on blade’s azimuth position. The blade vibrational frequency in the
flapwise direction is the same as the rotor rotational frequency (0.34Hz). Thus, the gravity is
responsible for the sinusoidal loads acting on the blades with a frequency corresponding to the
rotation of the rotor.

92
Figure 4.6. Blade tip flapwise deflection comparison. Wind speed 15m/s, pitch angle 15 degrees.
4.5 Coupling Effects
The distinct feature of our model is that we include the coupling between the rotor rotation and
blade vibration. These effects impact the fluid-structure interaction and contribute to oscillations
in the rotor response. Mathematical expressions for the coupling are provided by Eq. (3.30) in
Chapter 3. By including coupling terms in the model, we show the difference between the rotor
aerodynamic torque and individual blade torque in this section. To illustrate that the oscillations
of the individual blade torque and vibrations of the blade are related, the frequency components of
the blade torque and blade deflection are checked. With the purpose of studying the importance of
coupling effects in detecting possible rotor faults, we investigate the case when blades experience
ice formulation problems. The inclusion of such terms in the model enables us to detect the change
of the blade feature from rotor rotational behavior with much greater sensitivity.
4.5.1 Coupling Effect for a Rotor Blade
To understand the effects of coupling terms on rotor rotation, we investigate the behaviors of
aerodynamic torques and deflections for individual blades when wind speed and pitch angle are
0 50 100 1500
0.5
1
1.5
2
Time (sec)
Bla
de T
ip F
lapw
ise D
eflection (
m)
With Gravity
Without Gravity

93
constant as shown in Figs 4.7a and 4.7c. At the steady state, the torque generated by each blade is
identical except for a phase difference. The same behavior is observed in the blade deflection.
Such an observation is reasonable because flow is independent of time. The only reason for the
phase difference is due to the gravity. As a blade rotates, the effect of gravity on blade deflection
varies periodically depending on the blade azimuth position. Therefore, blade rotation is
influenced by blade vibration through the coupling terms, inducing torque oscillations. Figs. 4.7b
and 4.7d show that the dominant frequency in the blade torque and blade deflection is both 0.34
Hz, which means that blade torsional vibration is linked directly to its transverse vibration. This
frequency is also the same as the rotation frequency. When performing Fourier transform, the mean
value of the signal is subtracted from the signal to exclude the DC component. Fig. 4.7e illustrates
the total torque applied to the rotor that is the sum of individual blade torques. As shown, the total
torque varies with time. It is the combination of many different sinusoidal signals. Although the
magnitude of the torque fluctuations is less than 0.1%, it exists and may become significant in
different wind conditions. The cause of torque fluctuations is entirely due to the blade vibration
because here we are dealing with a rigid rotor and constant wind speed. Such rotor vibrations have
been reported in the literature [23, 84]. Fig. 4.7f demonstrates that the dominant frequency of the
rotor torque oscillation is 1.0 Hz. It is different from the frequency in blade torque and blade
deflection (0.34 Hz). The frequency of the total blade torque is tripled compared with the
individual blade torque. This fact means that the blade torque is not a pure sinusoidal signal;
instead, it also contains the third harmonics. Effects of the third harmonics are too small to be
observed clearly for individual torque. The 0.34 Hz frequency components of 3 blade torques are
120 degrees out of phase with each other with equal magnitudes. Therefore, the peak at the
rotational frequency is eliminated when adding individual blade torques together to obtain the total

94
aerodynamic torque. The harmonic at 1Hz are of different magnitude and is also out of phase.
However, the phase differences with each other are such that the 1Hz frequency survives the
summation and dominates the final signal. Figs. 4.7g-h illustrate that rotor speed also experiences
similar variations at steady state, and the dominating frequency of the oscillations is also 1.0 Hz.
This observation is reasonable since the rotor speed is related to the aerodynamic torque.
(a)
(b)
(c)
(d)
40 45 50 55 600
0.2
0.4
0.6
0.8
1
1.2
Time(s)
Bla
de T
ip F
lapw
ise D
efle
ctio
n(m
)
Blade1
Blade2
Blade3
0 2 4 6 8 100
0.01
0.02
0.03
0.04
0.05
0.06
Frequency(Hz)
Magnitu
de(m
)
40 45 50 55 602.2
2.3
2.4
2.5
2.6
2.7
2.8x 10
5
Time(s)
Aero
dynam
ic torq
ue (
Nm
)
Blade1
Blade2
Blade3
0 2 4 6 8 100
1
2
3
4
Frequency(Hz)
Magnitu
de(k
Nm
)

95
(e)
(f)
(g)
(h)
Figure 4.7. Aerodynamic torque, blade flapwise deflection and rotor speed with wind speed 15m/s,
pitch angle 15 degrees. (a) Blade tip flapwise deflection; (b) Frequency component of blade 1
deflection; (c) Individual blade aerodynamic torque; (d) Frequency component of blade 1 torque; (e)
Total aerodynamic torque; (f) Frequency component of total torque; (g) Rotor speed; (h) Frequency
component of rotor speed.
4.5.2 Ice Accretion
It is of interest to investigate the behavior of the wind turbine when symmetry is compromised as
a result of blade fault, in this case ice buildup in a blade. This physical change can be reflected in
30 40 50 60 70 807.262
7.2625
7.263
7.2635
7.264
7.2645
7.265x 10
5
Time(s)
Tota
l torq
ue (
Nm
)
0 2 4 6 8 100
0.005
0.01
0.015
0.02
0.025
Frequency(Hz)
Magnitu
de(k
Nm
)
40 50 60 70 8020.3179
20.318
20.3181
20.3182
20.3183
20.3184
Time (sec)
Roto
r speed (
rpm
)
0 2 4 6 8 100
0.5
1
1.5
2
2.5
3
3.5x 10
-5
Frequency(Hz)
Magnitu
de(r
pm
)

96
increased mass density in the blade. The purpose of this section is to show how the coupling terms
can be particularly effective in such applications as machine fault detection.
We divide the blade into 15 elements in the simulation. It is assumed that the ice deposition
happens at blade 3 and the blade mass density on the 6th element is doubled compared with its
original value. The wind speed is 12 m/s and pitch angle is 15 degrees. Fig 4.8a shows that the
blade deflection experiences higher amplitude oscillations (compared to other two) in time domain
when ice buildup happens. The different magnitude of the blade deflection is the result of different
inertia forces. The frequency component in Fig. 4.8b demonstrates that the magnitude of the peak
at rotational frequency 0.27 Hz in blade deflection is increased if blade inertia is increased. Due to
the coupling effect between structural motions and fluid structure interaction, the effect of blade
vibration couples to the rotor speed. Consequently, the rotor speed experiences stronger
oscillations than the symmetry case as shown in Fig. 4.8c, which means the coupling effect
becomes significant in the rotor rotation. Fig. 4.8c also shows that the magnitudes of the rotor
speed are slightly different, which is likely due to the different rotor-blade inertia. To investigate
whether blade fault can be reflected in the rotor oscillatory signal, the frequency components of
rotor speed is checked in Fig. 4.8d. As illustrated, a peak can be observed at rotor rotational
frequency 0.27 Hz if mass imbalance happens. This observation indicates that our model can be
used to detect rotor blade fault from the rotor vibration.

97
(a)
(b)
(c)
(d)
Figure 4.8. Rotor blade response with bilinear stiffness on blade 3. Wind speed 12 m/s, pitch angle
15 degrees. (a) Blade flapwise tip deflection comparison (b) Frequency component of blade deflection;
(c) Rotor speed comparison; (d) Frequency component of rotor speed.
To investigate the significance of coupling terms in detecting blade structural faults, the response
from our model are again compared with FAST. Since our model captures coupling effects while
FAST does not, our initial intention is to compare results from our model with FAST to show the
improvement in modeling. However, FAST cannot simulate the case when mass density increases
on one blade element although it can adjust all the blade mass densities in the distributed blade
properties. Therefore, we consider the response from our model with coupling terms eliminated as
30 35 40 45 50 55 600
0.2
0.4
0.6
0.8
Time(s)
Bla
de T
ip F
lapw
ise D
eflection(m
)
Blade1
Blade2
Blade3
0 0.5 1 1.50
0.02
0.04
0.06
0.08
Frequency(Hz)
Magnitu
de(m
)
Ice blade
Normal blade
40 45 50 55 6016.23
16.235
16.24
16.245
16.25
Time(s)
Roto
r speed(r
pm
)
Rotor Imbalance
Normal
0 1 2 3 4 50
0.5
1
1.5
2x 10
-3
Frequency(Hz)
Magnitu
de(r
pm
)
Rotor Imbalance
Normal

98
the result generated by FAST. We compare the cases with and without coupling to indicate the
importance of the coupling terms in detecting blade faults. Still, ice deposition happens at blade 3
and it is assumed that the blade mass density on the 6th element is doubled compared with its
original value. Figs. 4.9a and 4.9b show the comparison of rotor speed in the time and frequency
domains. The time domain response shows that except the slight magnitude difference, the
oscillations in rotor speed become higher when coupling terms are included in the model. From
the frequency response, it can be seen that both cases indicate a peak at rotational frequency 0.27
Hz; however, the magnitude of excited frequency is almost doubled if the coupling is included.
The comparison indicates that the presence of the coupling in the model can increase the sensitivity
of detecting blade faults, which could be useful to detect the problem of ice formulation in the
early stage.
(a)
(b)
Figure 4.9. Rotor speed response compare with and without coupling. Wind speed 12 m/s, pitch angle
15 degrees. (a) Rotor speed comparison in time domain; (b) Rotor speed comparison in frequency
domain.
30 40 50 6016.23
16.235
16.24
16.245
16.25
Time(s)
Roto
r speed(r
pm
)
Coupling
Without Coupling
0 1 2 3 4 50
0.5
1
1.5
2x 10
-3
Frequency(Hz)
Magnitu
de(r
pm
)
Coupling
WithoutCoupling

99
We also investigate the effect of ice buildup on different blade radial positions on the rotor speed.
The blade mass density increase is assumed to happen on the 2nd, 8th, and 14th element on blade3.
The 2nd node is close to blade root while the 14th node is near blade tip. Fig. 4.10 displays the
rotor speed comparison in the time domain and frequency domain. As can be seen, the magnitude
of rotor speed oscillations becomes stronger if the density increase happens near the blade tip. This
observation is due to the different blade density and stiffness along different blade radial positions.
Near blade tip, blade inertia and stiffness are designed to be lower than the root. Therefore, the
blade is prone to deform in the blade tip and deflects more if ice deposition happens here. The
increased magnitude of deflection transfers to the rotor speed through fluid-structure interaction
and the coupling between blade elastic and gross motion. As a result, the rotor speed experiences
stronger oscillations if the mass of the blade tip increases. The frequency domain response in Fig.
4.9b illustrates that the magnitude of the fundamental rotational frequency becomes higher if the
mass imbalance occurs near blade tip. However, the difference becomes less noticeable as the
position of the ice formulation travels from the blade root to the tip.
(a)
(b)
Figure 4.10. Rotor speed response on different blade position. Wind speed 15 m/s, pitch angle 15
degrees. (a) Rotor speed comparison in time domain; (b) Rotor speed comparison in frequency
domain.
30 35 40 45 50 55 6020.314
20.316
20.318
20.32
20.322
20.324
20.326
20.328
Time(s)
Roto
r speed(r
pm
)
near blade root
near blade middle
near blade tip
0 1 2 3 4 50
0.5
1
1.5
2
2.5
3
3.5x 10
-3
Frequency(Hz)
Roto
r speed(r
pm
)
Near blade root
Near blade middle
Near blade tip

100
To summarize the observations, it can be concluded that if the wind speed is constant and normal
to the rotor plane, the rotor speed undergoes small oscillations during steady state if pitch angle is
fixed during the operation. The dominant frequency of the rotor oscillation is 3 times larger than
the rotor rotational frequency. When rotor imbalance occurs due to the ice formulation on one of
the blades, the system loses its symmetry and rotor vibration becomes significant. Comparisons
between rotor asymmetric and symmetric cases illustrate that the proposed model can be used to
detect mass imbalance problems. In addition, the results with and without coupling demonstrate
that the inclusion of coupling terms can increase the sensitivity of the method that detects blade
structural problems.
4.6 Fluid Structure Interaction
The behavior of the wind turbine is closely influenced by the fluid-structure interaction (FSI),
meaning the interaction between wind flow and blade geometry as well as its movement. The
aerodynamic loads acting on the blades cause the blades to rotate with the rotor and to vibrate at
the same time. In return, the blade response in rotation and vibration affects the aerodynamic loads.
Investigating FSI is essential to understanding the aeroelastic behavior of wind turbines.
4.6.1 Normal Case Comparison
We investigate the angle of attack and blade deflection on individual blade to observe the effects
of FSI. Still, the blade is divided into 15 elements in the simulation. Fig. 4.11a shows that the angle
of attack experiences oscillations if FSI in included. The angle of attack describes the relative
motion between the wind and the airfoil and is calculated based by Eq. (2.26) in Chapter 2. The
dominant frequency for the angle of attack is the same as the blade vibrational frequency (0.34
Hz). This observation is reasonable because blade vibrations affect the angle of attack. These
oscillations cannot be observed if FSI is not considered. Fig 4.11b indicates that the inclusion of

101
FSI contributes to a slight phase difference in blade deflection. The difference is caused by the
additional aeroelastic damping associated with the interaction between the blade vibration and
wind flow.
(a)
(b)
Figure 4.11. Individual blade response comparison. Wind speed 15 m/s, pitch angle 15 degrees. (a)
Comparison of angle of attack on the 8th element of the blade; (b) Blade tip flapwise deflection
comparison.
4.6.2 Bilinear Stiffness
The importance of FSI on wind turbine behavior can be much appreciated when blade structural
faults happen. To better understand how the blade vibration and aerodynamic loads affect each
other, bilinear stiffness case is investigated in this section. The structure exhibits bilinear stiffness
when a crack occurs in a blade. Its stiffness is reduced when the local stress is tensile. In the
simulation, it is assumed that the structural problems happen on the 6th element of the blade 3.
Fig.4.12a shows the wind speed during the simulation. As the figure shows, the wind speed
increases from 10 m/s to 15 m/s at 40 seconds. The rotor angular acceleration in the time and
frequency domain is shown in Figs. 4.12b-c. The difference in the time domain is negligible except
60 65 70 75 801
1.2
1.4
1.6
1.8
2
Time(s)
Angle
of attack(d
egre
e)
No FSI
FSI
60 65 70 75 800.4
0.6
0.8
1
Time(s)
Bla
de T
ip D
efle
ctio
n(m
)
No FSI
FSI

102
a different magnitude increase at 40 seconds. The jump in the acceleration is induced by the sudden
change of wind speed. As for the frequency response, the 1.25 Hz frequency is excited if FSI is
included in the model. This frequency coincides with the natural frequency of blade 3, which
experiences structural problems. This natural frequency is not excited if aerodynamic forces are
assumed from the fluid to the structure only. The comparison shows that the interaction between
the blade motion and aerodynamic forces is essential to detecting blade faults from rotor oscillatory
signal.
To summarize, it is observed that FSI in the wind turbine couples the blade structural
motion to the wind flow. Such an interaction results in different blade responses and can provide
additional damping to the blade motion. In addition, FSI affects the behavior of rotor vibrations.

103
(a)
(b)
(c)
Figure 4.12. Blade crack simulation. (a) Wind speed; (b) Rotor angular acceleration comparison; (c)
Frequency component of rotor angular acceleration comparison.
4.7 Wind Shear
Different wind profile can induce different aeroelastic behaviors of wind turbines. One of the
typical wind profiles is the wind shear, which is caused by the friction between the ground and the
moving air. The presence of the wind shear produces cyclic variations in the wind speed
experienced by the rotating blade and is important to the analysis of the blade loads [85-86].
0 20 40 60 80
8
10
12
14
16
18
Time (s)
Win
d s
peed (
m/s
)
30 40 50 60
0
0.1
0.2
0.3
0.4
0.5
Time(s)
Roto
r accele
ratio
n (
rads/s
2)
No FSI
FSI
0 1 2 3 4 50
0.002
0.004
0.006
0.008
0.01
0.012
0.014
Frequency(Hz)
Magnitu
de(r
ads/s
2)
No FSI
FSI

104
Fig.4.13 shows a typical three-blade wind turbine and its associated wind shear distribution. The
wind is assumed to have a power law distribution of the form
𝑈(𝑧) =
𝑈0𝐻𝑡(𝐻𝑡 + 𝑧)
𝑚 (4.1)
where 𝑈(𝑧) is wind speed, 𝐻𝑡 is hub height, 𝑧 is the vertical distance from hub center, 𝑈0 is the
wind speed at hub height and 𝑚 is the wind shear exponent. Typical values for 𝑚 are from 0.1-
0.3. However, we simulated the case when the wind shear exponent varies from 0 to 1, where “1”
represents the extreme wind shear condition. Using the proposed model, we would like to observe
how the extreme wind shear conditions affect the aerodynamic loads by investigating the untypical
wind shear conditions.
Figure 4.13. Wind shear illustration

105
The periodic loads created by the vertical wind shear makes the aeroelastic response of the wind
turbine blade differ from the constant wind speed case. Wind shear causes a load imbalance across
the rotor and can lead to different aerodynamic loads and blade deflection than the case without
wind shear. To understand the effects of wind shear, both the responses of the individual blade and
the rotor response are investigated in the following.
4.7.1 Effects on Individual Blade Response
The results of wind shear with different wind shear exponent 𝑚 on the mean value of individual
blade thrust and torque are shown in Fig. 4.14. The plots are obtained by connecting the values
from 𝑚 = 0 to 𝑚 = 1 with an increment ∆= 0.1. 𝑚 = 0 means the wind speed is constant over
the rotor plane, while 𝑚 = 1 represents the extreme wind shear condition. The extreme condition
represents the worst scenario. All the forces are normalized with respect to the force when 𝑚 = 0.
Fig. 4.14a shows that the individual thrust force decreases with the increase of the wind shear
exponent. For the wind turbine we choose, whose parameters are provided in Table 4.1, the thrust
force decreases up to about 5% of the nominal value for the extreme wind shear condition 𝑚 = 1.
The individual blade torque, as shown in Fig.4.14b, experiences a different trend for different 𝑚.
For wind shear exponent below 𝑚 = 0.7, the torque is predicted to be less than the force when the
wind shear is absent. The deviation in this range is less than 1.5%. As the value of 𝑚 increases
above 0.7, the torque with the presence of wind shear is larger than the nominal value 𝑚 = 0.
Generally, for the typical wind shear exponent condition, which is 𝑚 = 0.1~0.3, both the thrust
and torque on the individual blade are less than that in the absence of wind shear.

106
(a)
(b)
Figure 4.14. Dimensionless forces for different wind shear exponent on blade 1. (a) Mean value of
individual thrust force; (b) Mean value of individual torque.
The comparison of the mean thrust force distribution along the blade with and without wind shear
is illustrated in Fig. 4.15. The wind shear exponent is set to 0.2 and the blade is divided into 15
elements in the comparison. The wind speed is 15 m/s and the pitch angle is 15 degrees. The 1st
blade element represents the element near the root while 15th blade element represents the element
close to the tip. For both cases, the thrust force has the largest magnitude on the 8th blade element,
which corresponds to the middle position of the blade radial length. Below this point, the thrust
force increases as the blade length increases. While past the middle position point, the thrust force
decreases as the blade length increases. Such variations are caused by the blade structural design.
The blade is designed with different twist angle and chord length along the radial direction. The
twist angle affects the angle of attack while the chord length influences the generated forces. The
combination of these two parameters along with wind flow condition results in different thrust
forces along the radial length direction. Fig. 4.15 illustrates that the thrust force distribution along
the blade with wind shear is less than that without wind shear. The observation is consistent with
0 0.2 0.4 0.6 0.8 10.94
0.95
0.96
0.97
0.98
0.99
1
Wind shear exponent
Norm
aliz
ed in
div
idual t
hru
st
0 0.2 0.4 0.6 0.8 10.985
0.99
0.995
1
1.005
1.01
1.015
Wind shear exponent
Norm
aliz
ed in
div
idual t
orq
ue

107
the earlier conclusion that individual thrust for a blade with typical wind shear exponent is less
than that without wind shear.
Figure 4.15. Comparison of thrust force distribution along radial blade length.
Fig. 4.16 displays the comparison of individual blade response with and without wind shear. The
typical wind shear exponent 𝑚 = 0.2 is chosen in the comparison. As Figs.4.16a-b illustrate, the
existence of wind shear contributes to stronger oscillations in both the thrust force and
aerodynamic torque. Such a trend also happens in the angle of attack, as shown in Fig. 4.16c. Since
the angle of attack and blade loads are related, they all experience oscillations with the same
frequency, which is 0.33 Hz. This frequency is the same as the rotary frequency. The oscillations
result from the fluid-structure interaction and the coupling effects. The blade deflection
comparison in Fig. 4.16d demonstrates that there’s a phase discrepancy between the case with and
without wind shear. These differences are due to the different fluid-structure interactions. The
interaction between aerodynamic loads and structural motion can provide additional damping to
the blade. The presence of wind shear affects the interaction and can result in different damping,
thereby inducing different phase angles in the blade deflection.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 150
200
400
600
800
1000
1200
1400
1600
1800
Blade element number along radial direction (1st~15th)
Thru
st F
orc
e (
N)
No shear
Wind shear

108
(a)
(b)
(c)
(d)
Figure 4.16. Individual blade response (blade 1) comparison with and without wind shear. (a)
Individual thrust force comparison; (b) Individual torque comparison; (c) Angle of attack on 8th
blade element; (d) Blade tip flapwise deflection.
40 50 60 70 803
3.5
4
4.5
5
5.5
6x 10
4
Time(s)
Thru
st F
orc
e(N
)
No shear
Wind shear
40 50 60 70 801
2
3
4
5
6x 10
5
Time(s)
Bla
de to
rque(N
m)
No shear
Wind shear
40 50 60 70 80
0.5
1
1.5
2
2.5
Time(s)
Angle
of attack(d
egre
e)
No shear
Wind shear
50 55 60 65 70 75 800.6
0.7
0.8
0.9
1
1.1
1.2
Time(s)
Bla
de tip
fla
pw
ise d
efle
ctio
n(m
)
No shear
Wind shear

109
4.7.2 Effects on Rotor Response
It is mentioned in Section 4.5.1 that if the wind speed is constant over the rotor plane, the dominant
frequency of the total rotor torque oscillation is 3P, although the frequency of the individual torque
fluctuation is 1P. “P” represents the once per revolution distribution (rotor speed). Similar
conclusions apply to the case when wind shear exists. The individual blade and total rotor torques
with wind shear in the time and frequency domain are depicted in Figs. 4.17a-d. The wind shear
exponent is 0.2 in the comparison. As the graphs show, the torque vibrational frequency for each
blade is 1P, which is 0.33Hz in this case. However, due to the combined effect of 3 individual
blades, just the 3P frequency and its harmonics are propagated down the hub. This observation
happens since the wind turbine blades are equally spaced with 120 degrees phase difference. The
1P effect is attenuated as a result of the averaging effect of the blades.

110
(a)
(b)
(c)
(d)
Figure 4.17. Individual blade torque and total rotor toque with wind shear 𝒎 = 𝟎. 𝟐. (a) Individual
blade torque; (b) Frequency component of individual blade torque; (c) Total rotor torque; (d)
Frequency component of total rotor torque.
60 62 64 66 68 701.8
2
2.2
2.4
2.6
2.8
3
3.2x 10
5
Time(s)
Aero
dynam
ic torq
ue(N
m)
Blade1
Blade2
Blade3
0 2 4 6 8 100
0.5
1
1.5
2
2.5
3
3.5x 10
4
Frequency(Hz)
Magnitu
de(N
m)
60 65 70 75 807.2
7.22
7.24
7.26
7.28x 10
5
Time(s)
Aero
dynam
ic torq
ue(N
m)
0 2 4 6 8 100
200
400
600
800
Frequency(Hz)
Magnitu
de(N
m)

111
Figs 4.18a-d compare the total rotor torque and thrust force with and without the wind shear. The
wind shear exponent is still 0.2 in the comparison. Figs. 4.18a and 4.18c show that the mean values
for both the rotor torque and thrust decrease when the wind shear is included, the differences are
around 0.4% and 0.7%, respectively. In addition, oscillations in the forces become stronger due to
the different wind speed profile introduced by the wind shear. Such observations can be further
confirmed by the frequency components comparison results in Figs. 4.18b and 4.18d. As
illustrated, the magnitude of 3P components and its harmonics are elevated when wind shear
exists. The rotor speed experiences a similar trend as the aerodynamic loads, as shown in 4.18e-f.
Its mean value becomes smaller but the 3P effects become more obvious.
The total rotor thrust force and torque for different wind shear exponent 𝑚 are shown in
Fig. 4.19. As Fig. 4.19a demonstrates, the thrust force decreases as the wind shear exponent
increases. The most significant deviation happens at the extreme wind shear condition 𝑚 = 1. The
force is almost 5% smaller than the nominal value 𝑚 = 0. The trend for the aerodynamic torque
variation is different from the thrust force. When the wind shear exponent is less than 0.5, the mean
value of the aerodynamic torque is slightly smaller than that in the absence of wind shear. The
largest deviation in this range is within 0.5%. If the exponent 𝑚 is greater than 0.5, the values of
the aerodynamic torque are larger than the nominal case 𝑚 = 0. For typical wind shear exponent
value 𝑚 = 0.1~0.3, both the rotor thrust and torque are slightly smaller than the case when the
wind shear is absent, about 1% for thrust and 0.5% for torque.

112
(a)
(b)
(c)
(d)
(e)
(f)
Figure 4.18. Rotor response comparison with and without wind shear. 𝒎 = 𝟎. 𝟐. (a) Total rotor
torque comparison; (b) Frequency component of total rotor torque comparison; (c) Total rotor thrust
comparison; (d) Frequency component of total rotor thrust comparison; (e) Rotor speed comparison;
(f) Frequency component of rotor speed comparison.
60 65 70 75 807.22
7.24
7.26
7.28
7.3
x 105
Time(s)
Aero
dynam
ic torq
ue(N
m)
No shear
Wind shear
0 2 4 6 8 100
200
400
600
800
Frequency(Hz)
Magnitu
de(N
m)
No shear
Wind shear
60 65 70 75 80
1.2
1.205
1.21
1.215
1.22x 10
5
Time(s)
Thru
st F
orc
e(N
)
No shear
Wind shear
0 2 4 6 8 100
20
40
60
80
100
120
Frequency(Hz)
Magnitu
de(N
)
No shear
Wind shear
60 65 70 75 80
20.27
20.28
20.29
20.3
20.31
Time(s)
Roto
r speed(r
pm
)
No shear
Wind shear
0 2 4 6 8 100
1
2
3
4
5
6x 10
-4
Frequency(Hz)
Magnitu
de(r
pm
)
No shear
Wind shear

113
(a)
(b)
Figure 4.19. Dimensionless forces for different wind shear exponent on blade 1. (a) Mean rotor thrust
force; (b) Mean rotor torque.
From the discussions in this section, it can be seen that the presence of the wind shear
aggravates the 3P effects, and results in different wind loads on the blade. The magnitudes of the
aerodynamic forces decrease for typical wind shear conditions.
The proposed wind turbine rotor blade model has been validated in this chapter. Once
verified, we added coupling terms to our model to investigate the effects of blade vibration on
rotor movement. We showed that the inclusion of coupling can help improve the sensitivity of the
methods that detect possible blade faults. To deepen our understanding of the interaction between
the structural movement and aerodynamic loads as well as different wind profiles, effects of the
fluid-structure interaction and wind shear are investigated. The next chapter explores the use of
rotor-blade dynamic to estimate wind speed.
0 0.2 0.4 0.6 0.8 10.95
0.96
0.97
0.98
0.99
1
Wind shear exponent
Norm
aliz
ed tota
l thru
st fo
rce
0 0.2 0.4 0.6 0.8 1
0.995
1
1.005
1.01
Wind shear exponent
Norm
aliz
ed tota
l torq
ue

114
Chapter Five: Wind Speed Estimation and Input Shaping
In this chapter, we explore the application of the model derived previously to the control of wind
turbines for improved performance. We considered two areas. One for more power extraction with
a more precise knowledge of the wind speed, the other for reducing blade vibration during pitch
control. A better knowledge of the wind speed will facilitate better control of the wind turbine and
consequently more efficient energy harvesting. Normally, an anemometer is mounted on the
nacelle to measure the wind speed. Such measured wind speed is different from what may be
experienced by the blades. For control purpose, it would be better that the wind speed on the blades
is known. Since wind drives both the turbine generator and causes blade to vibrate, blade vibration
behavior may allow us to better estimate the wind speed with the help of an accurate rotor-blade
model. Based on this reasoning, we propose a method to identify wind input using the rotor-blade
response information. In addition to wind speed estimation, reducing the blade vibration is also
important to ensure the power quality and protect turbine components. To prolong the lifespan of
the turbine and improve power quality, we investigated the use of the input shaping to mitigate the
blade vibration induced by the fast pitch rate.
5.1 Wind Speed Estimation
This section examines the use of a blade dynamics model to improve the accuracy of wind speed
estimation. We examined different wind speed cases to show the improvements.
5.1.1 Model Linearization
We used the model derived in Chapter 3 to estimate wind speed. The equation with two modes
(assumed mode model) to describe the blade motion is given by Eq. (3.37) in Chapter 3. The model
is linearized by perturbing system variables with respect to an operating point. Using Taylor’s
expansion, the linearized rotor-blade model can be written as

115
[ 1 0 0 0 00 1 0 0 00 0 𝑀𝜑𝜑 𝑀𝜑𝑞1 𝑀𝜑𝑞2
0 0 𝑀𝜑𝑞1 𝑀𝑞𝑞11 𝑀𝑞𝑞12
0 0 𝑀𝜑𝑞2 𝑀𝑞𝑞21 𝑀𝑞𝑞22]
[ 𝛥�̇�1𝛥�̇�2𝛥�̈�𝛥�̈�1𝛥�̈�2]
=
[ 0 0 0 1 00 0 0 0 1
0 0𝜕𝑇𝑎𝜕�̇�
0 0
𝐾11 𝐾12 0 𝐶11 𝐶12𝐾21 𝐾22 0 𝐶21 𝐶22]
[ 𝛥𝑞1𝛥𝑞2𝛥�̇�𝛥�̇�1𝛥�̇�2]
+
[
00𝜕𝑇𝑎𝜕𝑉
∫∅1(𝑥)𝑑𝑥 ·𝜕�̅�
𝜕𝑉
𝐿
0
∫∅2(𝑥)𝑑𝑥 ·𝜕�̅�
𝜕𝑉
𝐿
0 ]
𝛥𝑉 +
[
00𝜕𝑇𝑎𝜕𝛽
∫∅1(𝑥)𝑑𝑥 ·𝜕�̅�
𝜕𝛽
𝐿
0
∫∅2(𝑥)𝑑𝑥 ·𝜕�̅�
𝜕𝛽
𝐿
0 ]
𝛥𝛽
(5.1)
where ∅𝑖(𝑥) is the mode shape, 𝑞1 and 𝑞2 are the generalized coordinate corresponding to the first
and second modes. �̇� is the rotor speed, 𝑉 is the wind speed, and 𝛽 is the pitch angle, 𝛥 represents
perturbations. Expressions for the mass matrix, damping matrix, and stiffness matrix are provided
by Eq. (3.30) in Chapter 3. Determination of the aerodynamic loads 𝑇𝑎 and �̅� are introduced in
Chapter 2. Eq. (5.1) can be represented using a simplified expression as
�̇� = �̅�−𝟏�̅� · 𝒙 + �̅�−𝟏�̅� · 𝛥𝜷 + �̅�−𝟏�̅� · 𝛥𝑽 (5.2)
where
�̅� =
[ 1 0 0 0 00 1 0 0 00 0 𝑀𝜑𝜑 𝑀𝜑𝑞1 𝑀𝜑𝑞2
0 0 𝑀𝜑𝑞1 𝑀𝑞𝑞11 𝑀𝑞𝑞12
0 0 𝑀𝜑𝑞2 𝑀𝑞𝑞21 𝑀𝑞𝑞22]

116
�̅� =
[ 0 0 0 1 00 0 0 0 1
0 0𝜕𝑇𝑎𝜕�̇�
0 0
𝐾11 𝐾12 0 𝐶11 𝐶12𝐾21 𝐾22 0 𝐶21 𝐶22]
�̅� =
[
00𝜕𝑇𝑎𝜕𝑉
∫∅1(𝑥)𝑑𝑥 ·𝜕𝐹
𝜕𝑉
𝐿
0
∫∅2(𝑥)𝑑𝑥 ·𝜕𝐹
𝜕𝑉
𝐿
0 ]
�̅� =
[
00
𝜕𝑇𝑎𝑒𝜕𝛽
∫∅1(𝑥)𝑑𝑥 ·𝜕𝐹
𝜕𝛽
𝐿
0
∫∅2(𝑥)𝑑𝑥 ·𝜕𝐹
𝜕𝛽
𝐿
0 ]
𝒙 =
[ 𝛥𝑞1𝛥𝑞2𝛥�̇�𝛥�̇�1𝛥�̇�2]
Let 𝑨 = �̅�−𝟏�̅�, 𝑩 = �̅�−𝟏�̅�, 𝑯 = �̅�−𝟏�̅�, Eq. (5.2) can be further simplified as
�̇� = 𝑨 · 𝒙 + 𝑩 · 𝛥𝜷 + 𝑯 · 𝛥𝑽 (5.3)

117
In the above, 𝜷 is considered the input to the system while 𝛥𝑽 is considered the disturbance.
Hereafter, we use 𝒖 and 𝒙𝒅 to denote the pitch angle and wind disturbance. The equation that
represents the wind turbine rotor-blade system then becomes
�̇� = 𝑨𝒙 + 𝑩𝒖 +𝑯𝒙𝒅 (5.4)
Eq. (5.4) represents the model that will be used to estimate the wind speed. The following section
explains how to identify wind inputs from outputs.
5.1.2 Observer Design
An observer is a system that estimates the state variables of a given real system that are not directly
accessible to measurements. If a system is observable, it is possible to design such an observer to
identify the unknown variables. In control problem of wind turbines, the wind speed is considered
a disturbance to the system. The estimation of the wind input can be achieved by two steps: 1)
augmenting the disturbance to the model of the turbine blade; 2) designing an observer to estimate
both plant and disturbance states. Assuming we know the waveform of the disturbance, the wind
speed can be expressed as
�̇�𝒅 = 𝑨𝒅𝒙𝒅 (5.5)
In Eq. (5.5), 𝑨𝒅 is the disturbance matrix. For a constant wind speed, 𝑨𝒅 is a zero matrix.
The state observer for Eq. (5.4) can be expressed as
�̇̂� = 𝑨�̂� + 𝑩𝒖 +𝑯�̂�𝒅 +𝑲𝒙(𝒚 − �̂�)
�̂� = 𝑪�̂�
(5.6)
where 𝑲𝒙 is the observer gain for the plant system, and 𝑪 is the output matrix.
Similarly, the disturbance observer has the following form
𝒙�̇� = 𝑨𝒅�̂�𝒅 +𝑲𝒅(𝒚 − �̂�) (5.7)
where 𝑲𝒅 is the disturbance observer gain.

118
State variable error and disturbance error can be expressed as
𝒆𝒙 = 𝒙 − �̂�
𝒆𝒅 = 𝒙𝒅 − �̂�𝒅
(5.8)
To minimize the error in Eq. (5.8), calculating the differential equations for the state and
disturbance errors is helpful. Those equations can be obtained by differentiating Eq. (5.8) with
respect to time
�̇�𝒙 = �̇� − �̇̂� = 𝑨𝒙 + 𝑩𝒖 +𝑯𝒙𝒅 − 𝑨�̂� − 𝑩𝒖 −𝑯�̂�𝒅 −𝑲𝒙(𝒚 − 𝑪�̂�)
= (𝑨 − 𝑲𝒙𝑪)𝒆𝒙 +𝑯𝒆𝒅
(5.9)
�̇�𝒅 = �̇�𝒅 − �̇̂�𝒅 = 𝑨𝒅𝒙𝒅 − 𝑨𝒅�̂�𝒅 −𝑲𝒅𝑪(𝒙 − �̂�) = −𝑲𝒅𝑪𝒆𝒙 + 𝑨𝒅𝒆𝒅 (5.10)
Further simplifying Eqs. (5.9) and (5.10), the error equation for the augmented system that contains
both state and disturbance errors can be written in a compact form as
�̇� = [𝑨 − 𝑲𝒙𝑪 𝑯−𝑲𝒅𝑪 𝑨𝒅
] 𝒆 (5.11)
with
𝒆 = [𝒆𝒙𝒆𝒅] (5.12)
If we demand the augmented system error goes to zero asymptotically, the observer gain should
be chosen such that all eigenvalues of Eq. (5.11) are negative.
The observer for the augmented system has the following form
[ �̇�
�̇̂�𝒅] = [
𝑨 𝑯𝟎 𝑨𝒅
] [�̂��̂�𝒅] + [
𝑩𝟎]𝒖 + [
𝑲𝒙𝑲𝒅] (𝒚 − 𝑪�̂�) (5.13a)
𝒚 = [𝑪 𝟎] [𝒙𝒙𝒅] (5.13b)
Eqs. (5.13) represent the observer designed based on the linearized model, which can represent the
nonlinear system within a range around an operating point. The performance of the designed

119
observer can be evaluated by applying it to the original nonlinear model. The matrix 𝐶 is related
to the outputs. It differs for different output measurements. Based on the rotor-blade model, we
designed two observers. One using the rotor speed as the measurement while the other adds
additional blade deflection in the measurement. Including blade deflection in the measurement can
provide us more freedom to choose the observer gains. Those gains can help improve the
estimating accuracy if they are properly designed. By using the LQR method [87], the gains for
these two observers are determined as
𝑲𝒓 = [8801 3516 115.5 91266 329426 2182]
𝑲𝒐 = [−3.9 11.9 1.8 −15.4 871.6 9.2−32.5 211.1 8.0 126.9 15799 3.8
] (5.14)
In Eq. (5.14), 𝑲𝒓 represents the observer gain for the rotor speed measurement, while 𝑲𝒐 represents
the observer gain for our method. The behavior of the observers is investigated in the next section.
5.1.3 Results and Comparison
The results of the wind speed estimation using two different methods are compared in this section.
In both cases, we used the rotor-blade model to reconstruct the wind input. The first method uses
the rotor speed as the measured output, whereas the second method employs both the blade
deflection and rotor speed as the measurements. We hope to see an improved accuracy of
estimation with measured information of blade vibration. We use the blade tip flapwise deflection
to illustrate the idea of the estimation. The deflection can be measured by using the strain gauge.
To evaluate the behavior of the observer designed based on the linearized model, we applied it to
the model described by Eq. (3.37) in Chapter 3. In the simulation, the operating point is chosen as
wind speed 15 m/s, pitch angle 7.5 degrees, and rotor speed 31m/s.

120
We first investigate the case when the wind speed changes from 15 m/s to 18m/s. Fig. 5.1
shows the wind speed in the simulation while Fig. 5.2 compares the estimated wind speed using
two different methods. The “rotor speed only” line refers to the estimation based on the rotor speed
only, while “our method” refers to the case when both the blade vibrations and rotor speed are
used together to estimate the wind speed. As the graph shows, if the wind speed is estimated using
the rotor speed only, the estimated wind speed experiences larger fluctuations during the transient
response. On the contrary, a relatively smooth response can be observed if the blade deflection is
included in the measurement. Fig 5.2 also demonstrates that fewer oscillations happen in the
estimated wind speed during the steady state by using our proposed method. In addition, the
settling time in our method tend to be shorter than that using rotor speed only. The root mean
square errors for the “rotor speed only” case and our method (with respect to the real wind speed)
during the steady state are 0.072 and 0.015, respectively. Such values show that our method can
provide more accurate wind speed estimation. The improvements are likely to be caused by the
additional observer gains provided by the measurement of the blade vibration.
We then investigate the turbulent wind speed case. The wind speed is generated by using
a software called TurbSim [83]. Fig. 5.3 shows the estimating results using our method. As can be
observed, the estimates generated by our method follows the behavior of the wind input in both
magnitude and trend. Since the wind speed is estimated by using a linearized model that does not
capture the turbulent behavior of the unsteady wind flow, our method cannot fully predict the
variation in the wind speed. However, the normalized root mean square error between the real and
estimated values is 0.25%, which means the difference between them is negligible. Fig.5.4
demonstrates the wind speed estimation using the rotor speed measurement only. As the graph
illustrates, the estimated result experiences large oscillations and fails to capture the behavior of

121
the real wind speed. Those results indicate that if we try to reconstruct the wind input from the
rotor-blade response, using the rotor speed measurement only is not enough. An additional
measurement of blade deflection can help improve the accuracy of wind speed estimation.
In conclusion, the accuracy of wind speed estimation can be improved if both the blade
deflection and rotor speed are used to estimate the wind input. The reason is that the additional
measurement, blade deflection in this case, can provide us extra information that is related to the
wind speed. The information helps improve the performance of the designed observer, thereby
obtaining better estimating results of the wind speed.
Figure 5.1. Real wind speed.
Figure 5.2. Estimated wind speed with different measurements.
0 20 40 60 80 100 120 140 16014
15
16
17
18
19
20
Time (sec)
Win
d s
peed (
m/s
)
50 60 70 80 90 100 110 12014
15
16
17
18
19
Time(s)
Win
d s
peed(m
/s)
Rotor speed only
Our method

122
Figure 5.3. Wind speed estimation using our method.
Figure 5.4. Wind speed estimation using rotor speed.
5.2 Input Shaper Design
Literature shows that the fast pitch control can help with alleviating machine loads in response to
rapid wind speed change [88]. However, fast pitch rate can generate blade vibrations, which could
damage the components of the turbine and affect power quality. In this section, we considered the
pitch command as an impulse input to analyze the effect of fast pitch rate on blade vibration. We
used the input shaping control method [89-91] to mitigate the induced vibrations.

123
5.2.1 Fundamental Concepts
Suppose that we apply an impulse sequence to a second order system. The system will oscillate in
a decaying sinusoidal pattern after experiencing such an input. This behaviour is shown in the solid
blue line in Fig. 5.5. If a second impulse is delivered to the system at the “right” time with the
“right” magnitude, the system’s response may be vibration free after the application of the second
impulse as illustrated in Fig. 5.6. The “right” time is at the half period, and the “right” magnitude
is the second peak value of the natural response.
Figure 5.5. Individual response to two impulses.
Figure 5.6. Combined response to two impulses.
0 1 2 3 4 5 6
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
Time
Am
plit
ude
Respone to first impulse
Response to second impulse
0 1 2 3 4 5 6
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
Time
Am
plit
ude
Response to both impulses

124
The impulse response for a second order system can be described by the following equation
𝑦𝑖(𝑡) = 𝐴𝑖𝑒−𝜁𝜔(𝑡−𝑡𝑖)sin ((𝑡 − 𝑡𝑖)𝜔√1 − 𝜁2) (5.15)
where 𝑦𝑖(𝑡) is the output, 𝐴𝑖 is the magnitude of the first peak of the impulse response, and 𝑡𝑖 is
the time when the ith impulse input is applied to the system. 𝜔 is system’s resonant frequency
while 𝜁 is the damping ratio. For a linear system, the response immediately following the delivery
of the 𝑁𝑡ℎ impulses can be expressed as
𝐴𝑁
= √(∑𝐴𝑖𝑒−𝜁𝜔(𝑡𝑁−𝑡𝑖) sin (𝑡𝑖𝜔√1 − 𝜁2)
𝑁
𝑖=1
+∑𝐴𝑖𝑒−𝜁𝜔(𝑡𝑁−𝑡𝑖)cos (𝑡𝑖𝜔√1 − 𝜁2)
𝑁
𝑖=1
)2
(5.16)
Suppression of the residual vibration can be achieved by forcing 𝐴𝑁 to zero. Such a suppresion
happens when both the sine and cosine terms in Eq. (5.16) equal to zero
∑𝐴𝑖𝑒−𝜁𝜔(𝑡𝑁−𝑡𝑖) sin (𝑡𝑖𝜔√1 − 𝜁2)
𝑁
𝑖=1
= 0 (5.17)
∑𝐴𝑖𝑒−𝜁𝜔(𝑡𝑁−𝑡𝑖)cos (𝑡𝑖𝜔√1 − 𝜁2)
𝑁
𝑖=1
= 0 (5.18)
To illustrate the idea of input shaping, the following two constraints are imposed to the system
𝑡1 = 0 (5.19)
∑𝐴𝑖
𝑁
𝑖=1
= 1 (5.20)
The first constraint by Eq. (5.19) specifies the origin of the first impulse, and the second constraint
by Eq. (5.20) normalizes a shaper’s impulse magnitudes. Both costraints can be expanded to the
real design case without too much difficulty.

125
For a two-impulse shaper, three unknown variables can be calculated from Eqs. (5.17-5.20)
if 𝜔 and 𝜁 are known. Those equations determine the simplest two-impulse input shaper for the
system. The associated impulse sequence can completely suppress the residual vibration of the
system oscillating with a single mode if the natural frequency and damping ratio are known
exactly. However, in practical situations, these parameters are estimated with errors, and the
impulse sequences are assigned with improper magnitudes and may be spaced incorrectly. In such
case, part of the residual vibrations will remain in the system, as shown in Fig. 5.7. Those
vibrations can be suppressed by creating a duplicate of the residual vibrations that is out of phase
with the remaining oscillations. This idea is illustrated in Fig. 5.8. Duplicating such a signal can
be made possible by applying a second two-impulse shaper with a proper phase shift and
magnitude. By adding the two residual vibration signals created by the two two-impulse shapers,
the total response can be obtained as shown in Fig 5.9. As can be observed, the residual vibration
of the system is suppressed by the employment of two flawed two-impulse shapers. The second
two-impulse shaper should be applied to the system at a specific time so that the combination of
the two two-impulse shapers becomes a three-impulse shaper. Such a three-impulse shaper can
improve the parameter insensitivity to impulse sequence. The improvement is useful for vibration
suppression.

126
Figure 5.7. Response using an improperly positioned two impulse shaper.
Figure 5.8. Repeating two incorrect two impulse shapers
0 1 2 3 4 5 6
-0.4
-0.2
0
0.2
0.4
0.6
Time
Am
plit
ude
Response to incorrect two impulses
0 1 2 3 4 5 6 7 8
-0.4
-0.2
0
0.2
0.4
0.6
Time
Am
plit
ude
1st & 2nd response
2nd & 3rd response

127
Figure 5.9. Response to three impulse shaper
Since knowing the system paramters exactly is difficult, use of a three-impulse input shaper is
more practical for a proper vibration mitigation. To reduce the sensitivity of the system response
to impulse sequence, more constrains are added to the system by differentiating eqs. (5.17-5.18)
with respect to the natural frequency. Those two additional equations can be obtained as
∑𝐴𝑖𝑡𝑖𝑒−𝜁𝜔(𝑡𝑁−𝑡𝑖) sin (𝑡𝑖𝜔√1 − 𝜁2)
𝑁
𝑖=1
= 0 (5.21)
∑𝐴𝑖𝑡𝑖𝑒−𝜁𝜔(𝑡𝑁−𝑡𝑖)cos (𝑡𝑖𝜔√1 − 𝜁2)
𝑁
𝑖=1
= 0 (5.21)
Combining these constraints with Eqs. (5.16-5.18), a closed form solution for a single mode three-
impulse sequence can be described as follows
𝐾 = 𝑒−
𝜁𝜋
√1−𝜁2 (5.23a)
0 1 2 3 4 5 6 7 8-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
Time
Am
plit
ude
Response to three impulses

128
∆𝑇 =𝜋
𝜔√1 − 𝜁2 (5.23b)
𝑑𝑒𝑛𝑜𝑚 = 1 + 2𝐾 + 𝐾2 (5.23c)
𝐼𝑚𝑝𝑢𝑙𝑠𝑒 1: 𝑡𝑖𝑚𝑒 = 0 𝑎𝑚𝑝𝑙𝑖𝑡𝑢𝑑𝑒 = 1/𝑑𝑒𝑛𝑜𝑚 (5.23d)
𝐼𝑚𝑝𝑢𝑙𝑠𝑒 2: 𝑡𝑖𝑚𝑒 = ∆𝑇 𝑎𝑚𝑝𝑙𝑖𝑡𝑢𝑑𝑒 = 2𝐾/𝑑𝑒𝑛𝑜𝑚 (5.23e)
𝐼𝑚𝑝𝑢𝑙𝑠𝑒 3: 𝑡𝑖𝑚𝑒 = 2∆𝑇 𝑎𝑚𝑝𝑙𝑖𝑡𝑢𝑑𝑒 = 𝐾2/𝑑𝑒𝑛𝑜𝑚 (5.23f)
where “𝑑𝑒𝑛𝑜𝑚” term is used to normalize the impulse amplitudes. Eq. (5.23) shows that the
impulse amplitude depends on damping ratio 𝜁 only while impulse spacing depends on both the
natural frequency 𝜔 and damping ratio 𝜁. The input shaper described by Eq. (5.23) can reduce the
residual vibrations when the natural frequency is estimated slightly in error [91].
A delay in the system’s rise time will be induced if the input shaping method is applied to
reduce system vibrations. For a three-impulse sequence, the command will be delayed by a time
that equals to the time of the final impulse in the shaper. However, such a delay does not affect the
stability of the system, as will be shown later. The input shaper theory will be used to reduce
vibrations caused by the fast pitch rates.
5.2.2 Input Shaping Design for Pitch Control
Using the input shaping method, pitch command can be fed through a shaper and into the control
system. Fig 5.10 shows the shaper position for a wind turbine system. As the graph illustrates,
command generated by input shaping is outside the wind turbine system, which means the delay
caused by the shaping command won’t lead to instability problems.
The input shaping design method in Section 5.2.1 only considers the first vibrational mode
of a system. Although a blade contains many vibrational modes, the first mode appears to be the
most dominant one. We treat the blade as a linear system and examine the use of a “single mode

129
shaping” method to reduce blade vibrations. Fig. 5.11 shows the blade vibration with and without
the input shaper. The “unshaped input” line denotes the response to the unshaped pitch input, while
the “shaped input” line represents the response to the shaped pitch command. The pitch angle
changes from 5 degrees to 15 degrees at 80 seconds. A three-impulse sequence shaper is designed
for the system. The natural frequency and damping ratio of the blade are 1.1 Hz and 0.02,
respectively. We consider only the first mode when designing the input shaper. The three impulse
happens at time 80 seconds, 80.4 seconds, and 80.8 seconds. The corresponding magnitude
increases are 2.66 degrees, 5.0 degrees, and 2.34 degrees, respectively. The root mean squares
(RMS) for the unshaped and shaped inputs from 80 seconds to 90 seconds are 0.48 and 0.41,
respectively. The comparison results show that the magnitude of the residual vibration can be
effectively suppressed by including an input shaper in the control system.
Fig. 5.12 displays the result when the blade natural frequency is estimated with 10% error.
The natural frequency is assumed to be 1.0 Hz in the simulation. The three impulse happens at
time 80 seconds, 80.5 seconds, and 81 seconds. The corresponding magnitude increases are the
same as before. The graph demonstrates that the resulted input shaper can mitigate the magnitude
of the vibrations. The RMS for the new input shaper is 0.43. This result is consistent with the
earlier conclusion that the input shaper designed based on Eq. (5.23) can be effective when the
actual frequency is estimated slightly in error.
To summarize, the wind speed was estimated from the rotor rotation and blade deformation
in this chapter. To achieve this goal, an observer was designed based on the linearized model. The
results showed that the proposed method can improve the estimating accuracy of the wind speed.
In addition, effects of fast pitch rate on blade vibration were investigated and an input shaper was

130
designed to reduce the associated vibrations. In the next chapter, the relation between rotor motion
and generator voltage signal is investigated.
Input shaper Wind turbine blade system
Pitch angle
command OutputController
Wind
Closed loop control system
Figure 5.10. Input shaper for a wind turbine control system
Figure 5.11. Blade flapwise tip deflection comparison
70 75 80 85 90 95 100-2
-1.5
-1
-0.5
0
0.5
1
Time(s)
Bla
de tip
defle
ctio
n(m
)
Unshaped input
Shaped input
82 83 84-1
-0.5

131
Figure 5.12. Blade flapwise tip deflection comparison (different natural frequency)
70 75 80 85 90 95 100-2
-1.5
-1
-0.5
0
0.5
1
Time (s)
Bla
de tip
fla
pw
ise d
efle
ctio
n (
m)
Unshaped input
shaped input
82 83 84
-0.8
-0.6
-0.4
-0.2

132
Chapter Six: Blade Motion and Generator Response
As air flows through the rotor plane, lift and drag forces are induced because of the shape of the
wind turbine blade. The combination of these forces contributes to the aerodynamic torque on the
rotor shaft, which drives the generator to produce power. The behavior of the generator is closely
related to the aerodynamic torque and rotor speed. If the rotor system loses its symmetry because
of blade structural problems, oscillation could occur in the aerodynamic torque. Those oscillations
affect the electrical signal on the generator side. Although the analysis of the blade vibration [16,
18, 21, 60-62] and generator performance [23, 92] has received considerable attention, much less
work has been conducted on the effects of rotor oscillations on the generator. In this chapter, the
relation between the motion of the blade and the behavior of the generator behavior is investigated.
Particularly, we investigate the case how the generator voltage reacts when one of the blades is
broken during operation. The result is helpful in developing effective techniques for detecting
faulty blades from generator electrical signals.
6.1 Generator Model
A model of a wind turbine’s rotor blade that describes both the structural and aerodynamic parts
has been developed in the previous chapters. To investigate the relation between the blade motion
and the generator response, a generator model is also required. We use a DC generator model to
study the effect of blade behavior on the generator electrical signals. Fig. 6.1 illustrates the power
harvesting component with an equivalent simplified electrical circuit of the DC generator. The
drive train is not included in our investigation for simplicity.

133
L R
uJ
I
DC generator
Figure 6.1. Wind power component with a DC generator
Based on Fig. 6.1, power transfers from the mechanical domain to the electrical domain. The
governing equations are according to the Newton’s law for the mechanical domain and the
Kirchoff’s circuit law for the electrical domain:
�̇� = −
𝐾𝑓
𝐽𝜔 +
1
𝐽𝑇𝑚 −
𝐾𝑡𝐽𝐼 (6.1)
𝑉 = 𝐾𝑏𝜔 − 𝑅𝐼 − 𝐿
𝑑𝐼
𝑑𝑡 (6.2)
where 𝜔 and 𝑇𝑚 are the generator speed and the mechanical torque on the high-speed end,
respectively. Parameters 𝐽, 𝐾𝑡, 𝐾𝑏, and 𝐾𝑓 are the mass moment of inertia, torque constant, back
electromotive force (emf) constant, and generator damping coefficient, respectively. Variables 𝐼
and 𝑉 are the electrical current and voltage, 𝑅 represents the resistance, and 𝐿 represents the
coefficient of auto-inductance. From power transfer point of view, wind flow causes turbine to
rotate through the aerodynamic coupling. Generator’s high-speed shaft is driven through a

134
mechanical coupling by the turbine rotor. Harvesting of wind energy is characterized by the energy
dissipating term 𝐾𝑡
𝐽𝐼 in the mechanical domain in Eq. (6.1).
6.2 Generator Torque Control
The generator torque drives the generator to produce power in the electrical domain. Control
strategies for the generator torque are the different depending on the wind condition. Based on the
wind speed, a wind turbine operation can be categorized into three working regions [93-94]. In
region 1, wind speed is too low to start-up the turbine and the turbine does not capture wind energy
in this region. In region 2, wind speed is high enough for the machine to start-up and the wind
turbine begins power production. The main objective in region 2 is to capture as much power as
possible. In region 3, wind speed is above the rated value and the main goal is to produce constant
power as well as protect the structure of the turbine from being damaged by the wind loads. The
objective of control is to obtain the optimum tip speed ratio (TSR) in region 2 and to maintain
constant torque and rotor speed in region 3. The TSR is defined as the ratio between the rotational
speed of the blade tip and the wind speed.
The performance of energy harvest is closely related to the power coefficient, which is
defined as the ratio between the actual power produced by a wind turbine and the power available
in the wind. For a variable-speed wind turbine, maximizing the power coefficient in region 2 is
enabled through maintaining the optimum TSR by using generator torque control. The power
quality in region 3 is ensured by maintaining the turbine speed at a constant value using pitch
control. The generator torque for the 1.5 MW baseline wind turbine with different operating
regions is shown in Fig. 4.1 in Chapter 4. The desired behavior of the generator torque is
proportional to the square of the generator speed in region 2 and constant in region 3.
The reference torque in region 2 satisfies the following equation

135
𝑇𝑚 = 𝑘𝜔2 (6.3)
where 𝑘 is the generator torque constant in region 2. To determine the generator torque constant,
parameters such as maximum power coefficient, 𝐶𝑝𝑚𝑎𝑥, and optimum TSR, 𝜆𝑜𝑝𝑡, must be
determined. These parameters are calculated by examining the three-dimensional graph that plots
the power coefficient versus TSR and pitch angle. Such a graph can be obtained through running
an aerodynamics code to generate the necessary values. Simulations for different pitch angle and
TSR are performed to find 𝐶𝑝𝑚𝑎𝑥 and 𝜆𝑜𝑝𝑡. Once the graph is obtained, 𝑘 can be determined by
using the optimum power coefficient and TSR. 𝑘 also depends on the radius of the rotor. Its value
varies for different wind turbine sizes.
6.3 Effect of Blade Motion on Generator Voltage Signal
The torque generated by the wind on the rotor with the help of blade drives the generator to produce
electrical power. It is, therefore, natural to anticipate that the voltage may embed information of
the rotor-blade motion. The relation between blade structural motions and the behavior of the
generator is investigated in the following.
We use Eqs. (6.1-6.2) in conjunction with Eqs. (3.37) in Chapter 3 to obtain the generator
voltage response. In the simulation, the generator torque, speed and acceleration are determined
from the rotor-blade model. Substituting them into Eqs. (6.1-6.2) can obtain the responses in the
electrical domain. The 1.5 MW baseline wind turbine, whose parameters are provided in Table 4.1
in Chapter 4, is used in the simulation. If the wind speed is constant and normal to the rotor plane,
the blade experiences periodic oscillations as it rotates because of the gravity effects, as discussed
in Chapter 4. These vibrations are coupled to the aerodynamic forces through the fluid-structure
interaction and the coupling effect, causing oscillatory behaviors in the wind loads on individual
blades. The described phenomena are shown in Figs 6.2a-b, which show the individual blade

136
vibrations and torque response. The dominant oscillatory frequency in both cases is 0.34 Hz. It is
the rotor speed frequency. In addition to the 0.34 Hz component, these signals also contain
harmonics at a 1 Hz that is too small to be observed clearly. Because the amplitudes at 0.34 Hz are
the same while the amplitudes at 1 Hz for different blades are different, together with the fact that
the blades are distributed 120 degrees apart in space for a three-blade wind turbine, the total
aerodynamic torque (the combination of individual blade torques) experiences small variations at
1 Hz, as shown in its time and frequency response in Figs. 6.3a-b. A similar oscillatory behavior
can be observed in the rotor speed in Figs. 6.3c-d because of the coupling effect and fluid-structure
interaction. This observation is reasonable since the rotor speed depends on the aerodynamic
torque. To investigate whether these oscillations would transfer to the generator side, the behaviors
of electrical signals are analyzed. As Fig. 6.3f shows, the dominant frequency of the voltage
oscillations is the same as the rotor vibrational signal (1 Hz). This similarity demonstrates that the
behavior of the generator is related to the rotor oscillations. The magnitude of the variations in
voltage is small in Fig. 6.3e; however, it can become significant if structural problems happen or
different wind condition occurs. Discussions in this section show that the generator electrical
signal follows the trend of the rotor vibration. The observation reveals that the electrical signal on
the generator side is related to the rotor response.

137
(a)
(b)
Figure 6.2. Individual blade response. Wind speed 15 m/s; Pitch angle 15 degrees. (a) Blade tip
flapwise deflection; (b) Individual blade torque;

138
(a)
(b)
(c)
(d)
(e)
(f)
Figure 6.3. Total aerodynamic torque, rotor speed and generator voltage with wind speed 15m/s,
pitch angle 15 degrees. (a) Aerodynamic torque; (b) Frequency component of aerodynamic torque;
(c) Rotor speed; (d) Frequency component of rotor speed; (e) Generator voltage in the time domain;
(f) Generator voltage in the frequency domain;

139
6.4 Broken Blade
One of the failures that a wind turbine may experience is the broken blade may be caused by a
lightning strike. When such problem occurs, part of a blade may break off from the entire blade
structure due to centrifugal forces. The new spatial distribution of the blade structure creates a
rotor asymmetry situation and affects the aerodynamic loads and blade response. Different
aerodynamic forces will result in different voltages on the generator side. In the following
investigation, such a failure is simulated to gain insights into the relation between the motion of
the blade and the behavior of the generator.
6.4.1 Different Wind Speed
The blade is divided into 15 elements in the simulation and thus includes 15 nodes. We assume
that the blade breaks off at the 3rd node, as shown in Fig. 6.4. The part beyond this point flies off
from the whole blade structure, and the remaining part still connects to the hub. For the
convenience of comparison, the lightning strike is assumed to happen at 50 seconds, and the blade
is intact before this time point and experiences structural problems after.
Third node
Figure 6.4. Blade nodes illustration
We again use Eqs. (6.1-6.2) in conjunction with the rotor-blade model described by Eq. (3.35) to
obtain both the rotor and generator responses. Figure 6.5 illustrates the simulation results of the
blade output and generator voltage for the above-mentioned failure. We choose the 1.5 MW
baseline wind turbine to perform the simulation. Its parameters are provided in Chapter 4. The

140
wind speed is 12 m/s in the simulation and the structural problems are assumed to happen at blade
3. An interesting point can be observed after the blade is struck by the lightning: the magnitudes
of the rotor speed, aerodynamic torque, and thrust force all increase and oscillate with time, as
shown in Figs 6.5a-c. The increase in forces and rotor speed is caused by the different wind
pressure distribution over the rotor plane. When part of the structure separates from blade 3, the
associated aerodynamic asymmetry situation results in a different induced flow velocity on the
unbroken blades. The induced velocity can be considered the loss in wind velocity when the air
flows through a wind turbine rotor and is related to the axial induction factor. Fig. 6.5d shows that
the axial induction factor on the intact blade decreases after 50 seconds at steady state. The
observation indicates that less velocity loss occurs near the intact blades 1 and 2 as the wind passes
through the rotor plane. Consequently, the pressure loading over the rotor plane is redistributed
such that it becomes larger on those two blades. On the broken blade 3, aerodynamic loads become
smaller since blade 3 loses most of its structural part and could not contribute the same to capturing
the wind power. The individual aerodynamic torques in Fig. 6.5e confirm the observation. Whether
the total rotor forces increase or decrease depends on the sum of all the blade loads. In this case,
the total aerodynamic and thrust force both increases. However, aerodynamic loads for different
wind speeds are different and the response to a different wind speed will be investigated later. The
oscillations in the rotor speed and aerodynamic loads are caused by the asymmetric distribution of
the blade structure. When the structure on one of the blades differs from the other two, rotor
imbalance is created. The imbalance affects the fluid-structure interaction and results in the
oscillations in the rotor rotational response. The oscillatory frequency (0.31 Hz) is close to the
rotor speed (0.30 Hz), which is consistent with the observations in Section 6.3. A similar trend can
be observed in the generator voltage, as illustrated in Fig. 6.5f. The figure shows that the magnitude

141
of the voltage increases and oscillates with the same frequency as the rotor speed. Again, the
observation shows that the generator electrical signal can reflect blade structural problems.
(a)
(b)
(c)
(d)
(e)
(f)
Figure 6.5. Rotor and generator response. Wind speed 12m/s, pitch angle 15 degrees. (a) Rotor speed;
(b) Total aerodynamic torque; (c) Total thrust force; (d) Axial induction number on the 8th blade
element on blade 1; (e) Aerodynamic torque on individual blades; (f) Generator voltage.
30 40 50 60 70 8016
16.5
17
17.5
18
18.5
Time(s)
Roto
r speed(r
pm
)
30 40 50 60 70 804
5
6
7
8
x 105
Time(s)
Aero
dynam
ic torq
ue(N
m)
30 40 50 60 70 807
8
9
10
11x 10
4
Time(s)
Thru
st F
orc
e(N
)
30 40 50 60 70 800.06
0.07
0.08
0.09
0.1
Time(s)
Axia
l inductio
n n
um
ber
30 40 50 60 70 800
1
2
3
4
x 105
Time (secs)
bla
de torq
ue (
Nm
)
Blade1
Blade2
Blade3
30 40 50 60 70 80340
345
350
355
360
Time(s)
Volta
ge(V
)

142
To investigate the blade and generator response for a different wind speed, we now set the wind
speed to 14 m/s and observe the results. Figs. 6.6a-c demonstrate that the magnitudes of the rotor
speed, aerodynamic torque, and thrust force all decrease after blade 3 is damaged. This observation
differs from the case when the wind speed is 12 m/s. Although the aerodynamic torque on
individual blades in Fig. 6.6d shows a similar trend as in Fig. 6.5e, the pressure distribution on the
blades are such that the sum of the individual blade loads becomes smaller. Such a decrease
transfers to the generator torque and voltage, as illustrated in Figs. 6.6e-f. The common point
between the two different wind speed cases is that both the aerodynamic loads and generator
voltage experience oscillations when structural problems occur.
Observations in this section show that the generator voltage provides a way of detecting
possible blade structural problems: if one of the blades breaks, the voltage will oscillate with time
and experience an increase or a decrease in the magnitude. Whether the voltage increase or
decrease is related to the total aerodynamic torque and rotor speed, which depend on the wind
speed. Different wind speeds will result in different results.

143
(a)
(b)
(c)
(d)
(e)
(f)
Figure 6.6. Rotor and generator response. Wind speed 14m/s, pitch angle 15 degrees. (a) Rotor speed;
(b) Total aerodynamic torque; (c) Total thrust force; (d) Aerodynamic torque on individual blades;
(e) Generator torque; (f) Generator voltage.
30 40 50 60 70 8018
18.5
19
19.5
Time(s)
Roto
r speed(r
pm
)
30 40 50 60 70 805
5.5
6
6.5
7x 10
5
Time(s)
Aero
dynam
ic torq
ue(N
m)
30 40 50 60 70 80 900.8
0.9
1
1.1
1.2x 10
5
Time(s)
Thru
st F
orc
e(N
)
30 40 50 60 70 800
0.5
1
1.5
2
2.5
3
3.5x 10
5
Time(s)
Aero
dynam
ic torq
ue (
Nm
)
Blade1
Blade2
Blade3
30 40 50 60 70 805.8
5.9
6
6.1
6.2
6.3
6.4
6.5x 10
5
Time(s)
Genera
tor
torq
ue(N
m)
30 40 50 60 70 80350
355
360
365
370
375
Time(s)
Volta
ge(V
)

144
6.4.2 Different Blade Radial Position
The structural problem happens at the 3rd node in the previous analysis. To observe the results
when the structural problem occurs on a different position, we assume in this section that the blade
breaks at the 8th node. We call the results for these two different cases the 3rd node response and
8th node response, respectively. In the simulation, the wind speed and pitch angle are set to 12 m/s
and 15 degrees, respectively. Figs. 6.7a-b compare the rotor responses for these two different cases.
The graphs show that the magnitudes of both the aerodynamic torque and rotor speed decrease
after blade 3 is broken. The observation is opposite to the 3rd node case. The common point is that
both responses experience oscillations. Analogous to rotor speed, the outputs of generator voltage
also experience magnitude differences and oscillations after the blade structural problem occurs,
as illustrated in Figs. 6.7c. Such a trend is not surprising since the generator behavior is related to
the rotor response. Comparison of the voltage response in the frequency domain, as shown in Fig.
6.7d, reveals that the dominant oscillatory frequencies differ for the 3rd node and 8th node
responses, which are 0.31 Hz and 0.25 Hz, respectively. The difference is induced by the different
spatial distribution of the blade structure. If the blade breaks at the 8th node, the remaining
structure that connects to the hub is longer; thus, the asymmetry distribution of the blade structure
is different from the 3rd node case. Different rotor asymmetric cases result in different oscillations
in the wind turbine rotor and consequently different generator responses. Thus, the dominant
frequencies are different.

145
(a)
(b)
(c)
(d)
Figure 6.7. Rotor and generator response comparison. Wind speed 12 m/s, pitch angle 15 degrees. (a)
Total aerodynamic torque comparison; (b) Rotor speed comparison; (c) Generator voltage
comparison; (d) Generator voltage comparison in the frequency domain.
In summary, discussions in this chapter showed that the generator electrical signal is closely related
to the blade motion. When one of the blades is broken, the blade loses its symmetry and the wind
loads on the blades are redistributed. The load redistribution results in a different aerodynamic
torque and consequently a different generator voltage. Whether the voltage increases or decreases
depends on the wind speed and the position where the blade breaks. The structure problems also
30 40 50 60 70 803
4
5
6
7
8x 10
5
Time(s)
Aero
dynam
ic torq
ue (
Nm
)
3rd node
8th node
30 40 50 60 70 8014
15
16
17
18
19
Time(s)
Roto
r speed(r
pm
)
3rd node
8th node
30 40 50 60 70 80280
300
320
340
360
Time(s)
Volta
ge(V
)
3rd node
8th node
0 0.5 1 1.5 20
0.05
0.1
0.15
0.2
0.25
0.3
frequency(Hz)
Magnitu
de(V
olts
)
3rd node
8th node
0.31 Hz
0.25 Hz

146
introduce oscillations in the voltage, and the dominant frequencies for different asymmetric cases
are different. Chapter 7 summarizes the main findings and conclusions in this thesis.

147
Chapter Seven: Conclusions, Discussions and Recommendations
7.1 Contributions
A dynamics model of the wind turbine rotor-blade for aeroelastic analysis, control algorithm
development, and condition monitoring purpose is developed in this thesis. To improve the
modeling accuracy, the coupling terms between rotor gross motion and elastic vibration is added
in the model. The inclusion of the coupling terms in the wind turbine dynamics equations helps us
understand the phenomenon of rotor oscillation due to blade vibration and possibly fault diagnosis.
Our model captures two-way interactions between aerodynamic wind flow and structural
response. On the aerodynamic side, both steady and unsteady wind flow conditions are
considered. On the structural side, blades deflect in both flap and edge directions while the rotor
is treated as a rigid body. The model captures effects of gravity and centrifugal stiffening to predict
the vibrational behavior of the structure more accurately. Based on the proposed model, we
estimate the wind speed from the rotor-blade response to facilitate wind turbine control problems.
With the purpose of extending the life of the machine, a method of reducing blade vibration by
using input shaping technique is investigated. Additionally, we use the model to investigate the
relation between blade motion and generator behavior. The result is helpful in developing effective
blade fault detecting techniques from generator electrical signals. The main objectives and
contributions of this research can be described as:
1. A finite element dynamics model of a rotor-blade system for a horizontal axis wind
turbine is developed. To predict aeroelastic response more accurately, coupling terms
between the blade elastic movement and rotor gross rotation are carefully derived, and
the two-way interactions between aerodynamic wind flow and structural response are
captured. The novelty of the proposed model is to use the Euler-Bernoulli beam to

148
include coupling terms that affect the interaction between structural motion and
aerodynamic loads. The coupling terms become significant when blade becomes
flexible and experiences large deflection.
2. Based on the dynamic model, improvement in modeling accuracy is shown by
investigating the significance of the coupling terms in detecting blade feature change
from rotor rotational behavior. In addition, the importance of fluid-structure interaction
is illustrated by analyzing its role in blade fault detection. The accuracy of the model
is further verified by simulating known phenomena such as centrifugal stiffening. To
help us better understand wind load distribution and aeroelastic responses, effects of
wind shear on aerodynamic loads and blade structural vibrations are analyzed.
3. An observer is designed to estimate wind speed using the assumed mode model to
improve the wind turbine control performance. Unlike other works that estimated wind
speed based on rotor speed, this approach added blade deflection in the measurement
to estimate wind speed. Additionally, the effect of pitch angle rate on blade vibration
is investigated and an input shaper is designed to mitigate the associated vibration.
4. By including a generator model in the equation, analysis of the relationship between
blade motion and generator electrical signal are explored. In particular, effects of
possible blade structural faults on generator voltage are investigated. This study can be
useful in developing effective methodologies to monitor blade health condition from
generator electrical signals.
7.2 Conclusions and Discussions
In this thesis, our primary focus is on the development of a rotor-blade model that can be used for
the purpose of analysis, improved system design, control algorithm development, and health

149
condition monitoring. We also explored the applications of the model in these areas. Compared
with the well-known FAST model, our model presents the coupling between rotor gross motion
and blade elastic vibration. The significance of the coupling terms depends on the blade mass
properties, blade deflection, rotor speed, and pitch angle. Providing such details can increase the
sensitivity of methods that detect changes in blade health condition. They also provide insights in
torsional vibration analysis that can inform a better wind turbine design. In addition to coupling
terms, our model captures the interaction among aerodynamic, elastic and inertial forces. Including
such an interaction helps us understand the rotor/blade behavior in relation to wind loads. An
integrated aerodynamic and structural model is also useful in analyzing the aeroelastic behavior of
wind turbines. Moreover, the proposed model captures the effects of centrifugal force and gravity.
The centrifugal force affects the natural frequency of the rotating blade while gravity influences
the blade vibrational behavior. Incorporating those terms is essential to gaining insights into the
physics of the rotor-blade system. Our model enables aeroelastic analysis, development of
advanced control strategy, and root cause analysis in machine health monitoring solutions. The
coupled Euler-Bernoulli beam/ BEMT model can also be used to study the center of mass
differences between different blades.
The proposed model was cross-validated against a model developed for the simulation
software FAST. Particularly, simulations were conducted by removing the coupling terms in our
model. Results were compared with those generated by FAST and shown to be in good agreement.
To verify the calculations, we conducted energy balance check. Our model agrees well with the
existing observations. For instance, it accurately predicts the effect of “centrifugal stiffening”, e.g.,
the natural frequency for a rotating blade become higher as the angular speed become higher. The
prediction is consistent with phenomenon described in the literature. In addition, our model can

150
simulate the effect of gravity on blade vibration. By comparing the results of blade vibration with
and without gravity, we showed that the gravity is responsible for the sinusoidal loads acting on
the blades with a frequency corresponding to the rotation of the rotor. The consistency between
our model and the known phenomena further validates our model.
The significance of the coupling effects may be suggested by the mathematical expressions
of coupling terms. For instance, when large deflection is involved, rotor motion is more affected
by the blade vibration. It has been reported that researchers are exploring blade design with
variable elastic properties in order to maximize wind power harvest [24]. Existing rotor-blade
model which ignores their coupling effects will not be appropriate. To further examine the
importance of the coupling terms, a case blade fault detection was studied. We illustrated that the
coupling terms can help increase the detection sensitivity from monitoring the rotor behavior.
We explored the application of our model to solve the problem of wind speed estimation.
A better knowledge of wind speed can facilitate better control of the wind turbine in improving
the efficiency of energy harvest. With an accurate model that captures the interaction of wind and
structure with a detailed description of the structural response, we can estimate the wind input by
measuring the structural response. We showed how this can be done through an observe based on
a linearized version of our model. Results illustrated that our method can improve the accuracy of
wind speed estimation compared with the method using rotor speed only. An accurate wind speed
information can benefit us in control problems of wind turbines.
To continue developing the techniques of blade fault detection, we investigated the relation
between the blade motion and the generator behavior. By adding a DC generator model to the wind
turbine rotor blade model, how blade structural problems can be reflected in the generator electrical
signals was analyzed. Particularly, we studied the case when one of the blades is broken during

151
operation. Numerical simulations showed that when such problems happen, the wind pressure on
the blade surface is redistributed, thereby inducing a different aerodynamic torque. As a result, a
difference in the voltage magnitude in the voltage of the generator occurs. Whether the value
increases or decreases depends on the wind speed and the fracture location. The rotor-plane
asymmetry also introduces oscillations in the voltage, and the dominant oscillatory frequencies for
different asymmetric cases are different. The result is helpful in developing effective techniques
for detecting faulty blades from generator electrical signals.
7.3 Future Work
If possible, validating our model against experiments is desirable, especially about the coupling
terms proposed in this thesis. We will then be able to fully explore the application of the findings
from this work. For example, this thesis illustrated that generator electrical signals can reflect the
structural faults of the wind turbine blades. An interesting future work would be to conduct
experimental studies and to develop a reliable means of fault detection with the presence of
measurement error.
We considered the blade as an Euler-Bernoulli beam. This assumption is valid as long as
the blade experiences small strain and the ratio between the blade length and height is large. If a
large deformation but small strain happens, bending effects dominant and our assumption can be
considered as valid. However, if a blade experiences large strain, the nonlinearity in the geometry
needs to be included to predict structural responses accurately. Our model can have wider
applications by capturing those effects.
One of the future directions for wind energy is to reduce cost. A better understanding of
different machine components of the turbine can help develop more advanced maintenance
strategies and thus reduce cost. This thesis proposed a wind turbine rotor blade model and

152
illustrated that possible blade fault can be detected from rotor vibrational signals. However, the
blade failure mechanism is not thoroughly studied and modeled. If a model that describes the
relation between possible blade fault and its effect on blade parameters such as stiffness is
developed, it can be coupled with our model to gain understanding of the effect of blade failure on
the turbine system’s behavior. In addition, another possible extension of our model is to include a
gearbox model to investigate the effect of wind loads on different gearbox components. For
instance, influences of different wind profiles on bearing loads can be analyzed to determine the
reliability of a gearbox and accumulated fatigue damage. Currently, how loads are transmitted to
and distributed through the gearbox is not well understood. Predicting fatigue life and the extent
of fatigue damage can be made possible with the help of such a model.
To extract more energy from the wind, one of the solutions is to build offshore wind
turbines because the winds are stronger and more reliable at sea. Although offshore wind turbines
can provide relatively stable power, the remote locations for them lead to limited availability and
high maintenance costs. It is, therefore, essential to develop more intelligent maintenance
strategies to improve the performance of systems that monitor the health of wind turbines. The
major difference between offshore and onshore wind turbines is that the former are subjected to
wave loads and water current on the tower in addition to wind loads on the blades. Our rotor blade
model can be further expanded to include such details to gain insights into the response of the
offshore turbine structure. The model can be used to solve problems such as wave load and
structural state estimation, which are helpful in improving offshore turbine structure design and
condition monitoring.

153
Reference
[1] J. L. Sawin, K. Seyboth, and F. Sverrisson, Renewables 2016: Global Status Report. 2016.
[2] “http://www.windenergy.org.nz/improvements-in-technology.” .
[3] W. E. Leithead, “Effective Wind Speed Models for Simple Wind Turbine Simulations,”
Br. Wind Energy Conf., pp. 321–326, 1992.
[4] Z. Xu, Q. Hu, and M. Ehsani, “Estimation of Effective Wind Speed for Fixed-Speed Wind
Turbines Based on Frequency Domain Data Fusion,” IEEE Trans. Sustain. Energy, vol. 3,
no. 1, pp. 57–64, 2012.
[5] M. H. Hansen, “Aeroelastic Instability Problems for Wind Turbines,” Wind Energy, vol.
10, no. 6, pp. 551–577, 2007.
[6] K. Thomsen, J. T. Petersen, E. Nim, S. Øye, and B. Petersen, “A Method for
Determination of Damping for Edgewise Blade Vibrations,” Wind Energy, vol. 3, no. 4,
pp. 233–246, 2000.
[7] I. Chopra and J. Dugundji, “Non-linear Dynamic Response of a Wind Turbine Blade,” J.
Sound Vib., vol. 63, pp. 265–286, 1979.
[8] A. R. S. Bramwell, G. Done, and D. Balmford, Bramwell’s Helicopter Dynamics.
Butterworh-Heinemann, 2001.
[9] A. Baumgart, “A Mathematical Model for Wind Turbine Blades,” J. Sound Vib., vol. 251,
pp. 1–12, 2002.
[10] D. H. Hogdes and E. H. Dowell, “Nonlinear Equations of Motion for the Elastic Bending
and Torsion of Twisted Nuniniform Rotor Blades,” NASA Tech. Note D-7818, 1974.
[11] B. S. Kallesøe, “Equations of Motion for a Rotor Blade, Including Gravity, Pitch Action
and Rotor Speed Variations,” Wind Energy, vol. 10, no. 3, pp. 209–230, 2007.
[12] J. W. Larsen and S. R. K. Nielsen, “Non-linear dynamics of wind turbine wings,” Int. J.
Non. Linear. Mech., vol. 41, no. 5, pp. 629–643, 2006.
[13] J. W. Larsen and S. R. K. Nielsen, “Nonlinear Parametric Instability of Wind Turbine
Wings,” J. Sound Vib., vol. 299, no. 1–2, pp. 64–82, 2007.
[14] J. W. Larsen, R. Iwankiewicz, and S. R. K. Nielsen, “Nonlinear Stochastic Stability
analysis of Wind Turbine Wings by Monte Carlo Simulations,” Probabilistic Eng. Mech.,
vol. 22, no. 2, pp. 181–193, 2007.
[15] A. D. Otero and F. L. Ponta, “Structural Analysis of Wind-Turbine Blades by a
Generalized Timoshenko Beam Model,” J. Sol. Energy Eng., vol. 132, no. 1, 2010.
[16] S. Beskhyroun, L. D. Wegner, and B. F. Sparling, “Control of Flapwise Vibrations in
Wind Turbine Blades Using Semi-Active Tuned Mass Dampers,” Struct. Control Heal.
Monit., 2011.

154
[17] V. Ramakrishnan and B. F. Feeny, “In-Plane Nonlinear Dynamics of Wind Turbine,”
Proc. ASME Int. Des. Eng. Tech. Conf. Comput. Inf. Eng. Conf., 2011.
[18] A. Staino, B. Basu, and S. R. K. Nielsen, “Actuator Control of Edgewise Vibrations in
Wind Turbine Blades,” J. Sound Vib., vol. 331, no. 6, pp. 1233–1256, 2012.
[19] L. Li, Y. H. Li, H. W. Lv, and Q. K. Liu, “Flapwise Dynamic Response of a Wind
Turbine Blade in Super-Harmonic Resonance,” J. Sound Vib., vol. 331, no. 17, pp. 4025–
4044, 2012.
[20] Y. Li, L. Li, Q. Liu, and H. Lv, “Dynamic Characteristics of Lag Vibration of a Wind
Turbine Blade,” Acta Mech. Solida Sin., vol. 26, no. 6, pp. 592–602, 2013.
[21] A. Staino and B. Basu, “Dynamics and Control of Vibrations in Wind Turbines with
Variable Rotor Speed,” Eng. Struct., vol. 56, pp. 58–67, 2013.
[22] L. Li, Y. H. Li, Q. K. Liu, and H. W. Lv, “A Mathematical Model for Horizontal Axis
Wind Turbine Blades,” Appl. Math. Model., vol. 38, no. 11–12, pp. 2695–2715, 2014.
[23] S. M. Muyeen, M. H. Ali, R. Takahashi, T. Murata, J. Tamura, Y. Tomaki, A. Sakahara,
and E. Sasano, “Blade-Shaft Torsional Oscillation Minimization of Wind Turbine
Generator System by Using STATCOM/ESS,” 2007 IEEE Lausanne POWERTECH,
Proc., pp. 184–189, 2007.
[24] V. Cognet, S. Courrech du Pont, I. Dobrev, F. Massouh, and B. Thiria, “Bioinspired
Turbine Blades Offer New Perspectives for Wind Energy,” Proc. R. Soc. A Math. Phys.
Eng. Sci., vol. 473, 2017.
[25] M. Iribas-Latour and I.-D. Landau, “Identification in Closed-Loop Operation of Models
for Collective Pitch Robust Controller Design,” Wind Energy, vol. 16, pp. 383–399, 2013.
[26] G. J. van der Veen, J. W. van Wingerden, P. A. Fleming, A. K. Scholbrock, and M.
Verhaegen, “Global Data-Driven Modeling of Wind Turbines in The Presence of
Turbulence,” Control Eng. Pract., vol. 21, no. 4, pp. 441–454, 2013.
[27] M. Jelavi, N. Peri, and I. Van Petrovi, “Identification of Wind Turbine Model for
Controller Design,” Power Electron. Motion Control Conf., pp. 1608–1613, 2006.
[28] T. Sant, “Improving BEM‐Based Aerodynamic Models in Wind Turbine Design Codes,”
PhD Thesis, University of Malta, 2007.
[29] J. G. Leishman, “Challenges in Modeling the Unsteady Aerodynamics of Wind Turbines,”
21st ASME Wind Energy Symp. 40th AIAA Aerosp. Sci. Meet., pp. 1–28, 2002.
[30] J. M. Jonkman, “Modeling of the UAE Wind Turbine for Refinement of FAST_AD,”
Technical Report, NREL/TP-500-34755, 2003.
[31] G. A. M. van Kuik, J. Peinke, R. Nijssen, D. Lekou, J. Mann, J. N. Sørensen, C. Ferreira,
J. W. van Wingerden, D. Schlipf, P. Gebraad, H. Polinder, A. Abrahamsen, G. J. W. van
Bussel, J. D. Sørensen, P. Tavner, C. L. Bottasso, M. Muskulus, D. Matha, H. J.
Lindeboom, S. Degraer, O. Kramer, S. Lehnhoff, M. Sonnenschein, P. E. Sørensen, R. W.

155
Künneke, P. E. Morthorst, and K. Skytte, “Long-Term Research Challenges in Wind
Energy – a Research Agenda by the European Academy of Wind Energy,” Wind Energy
Sci., vol. 1, no. 1, pp. 1–39, 2016.
[32] M. Hansen O.L., Aerodynamics of Wind Turbines, 2nd ed. London • Sterling, VA:
Earthscan in the UK and USA, 2008.
[33] P. J. Moriarty and A. C. Hansen, “AeroDyn Theory Manual,” Technical Report,
NREL/TP-500-36881, 2005.
[34] O. Ceyhan, “Aerodynamic Design and Optimization of Horizontal Axis Wind Turbines by
Using BEM Throry and Genetic Alorithm,” Master Thesis, Middle East Technical
University, 2008.
[35] D. Wood, Small Wind Turbines: Analysis, Design, and Application. Springer, 2011.
[36] T. Burton, D. Sharpe, N. Jenkins, and E. Bossanyi, Wind Energy Handbook, John Wiley
& Sons, 2001.
[37] R. E. Wilson and P. B. S. Lissaman, “Applied Aerodynamics of Wind Power Machines,”
1974.
[38] R. E. Wilson, P. B. S. Lissaman, and S. N. Walker, “Aerodynamic Performance of Wind
Turbines,” 1976.
[39] N. Troldborg and J. Sørensen, “A Simple Solution Method for the Blade Element
Momentum Equations with Guaranteed Convergence,” Wind Energy, vol. 17, pp. 1327-
1345, 2014.
[40] G. Hayman, R. Damiani, and J. Jonkman, “Development and Validation of a New Blade
Element Momentum Skewed-Wake Model within AeroDyn Preprint,” NREL/CP-5000-
63217, 2015.
[41] A. Suzuki, “Application of Dynamic Inflow Theory to Wind Turbine Rotors,” PhD thesis,
University of Utah, 2000.
[42] M. Berzeri and A. A. Shabana, “Study of the Centrifugal Stiffening Effect Using the
Finite Element Absolute Nodal Coordinate Formulation,” Multibody Syst. Dyn., vol. 7, no.
4, pp. 357–387, 2002.
[43] H. Zohoor and F. Kakavand, “Vibration of EulerBernoulli and Timoshenko Beams in
Large Overall Motion on Flying Support Using Finite Element Method,” Sci. Iran., vol.
19, pp. 1105–1116, 2012.
[44] L. Wang, X. Liu, and A. Kolios, “State of the art in the aeroelasticity of wind turbine
blades: Aeroelastic modelling,” Renew. Sustain. Energy Rev., vol. 64, pp. 195–210, 2016.
[45] J. M. Jonkman and M. L. B. Jr., “FAST User’s Guide,” Technical Report, NERL/EL-500-
38230, 2007.
[46] J. G. Holierhoek, “Aeroelasticity of Large Wind Turbines,” PhD Thesis, Delft University

156
of Technology. 2008.
[47] S. Bhowmik and R. Spee, “Wind Speed Estimation Based Variable Speed Wind Power
Generation,” Proc. 24th Annu. Conf. IEEE Ind. Electron. Soc., vol. 2, pp. 596–601, 1998.
[48] S. Bhowmik, R. Spee, and J. H. R. Enslin, “Performance Optimization for Doubly Fed
Wind Power Generation Systems,” IEEE Trans. Ind. Appl., vol. 35, no. 4, pp. 949–958,
1999.
[49] H. Li, K. L. Shi, and P. G. McLaren, “Neural-Network-Based Sensorless Maximum Wind
Energy Capture with Compensated Power Coefficient,” IEEE Trans. Ind. Appl., vol. 41,
no. 6, pp. 1548–1556, 2005.
[50] X. Yang, X. Han, and L. Xu, “Soft Sensor Based on Support Vector Machine for Effective
Wind Speed in Large Variable Wind,” Proc. 9th Int. Conf. Control. Autom. Robot. Vis.,
2006.
[51] W. Qiao, W. Zhou, J. M. Aller, and R. G. Harley, “Wind Speed Estimation Based
Sensorless Output Maximization Control for a Wind Turbine Driving a DFIG,” IEEE
Trans. Power Electron., vol. 23, no. 3, pp. 1156–1169, 2008.
[52] A. G. Abo-Khalil and D.-C. Lee, “MPPT Control of Wind Generation Systems Based on
Estimated Wind Speed Using SVR,” IEEE Trans. Ind. Electron., vol. 55, no. 3, pp. 1489–
1490, 2008.
[53] O. Barambones, J. M. G. de Durana, and E. Kremers, “A Neural Network Based Wind
Speed Estimator for a Wind Turbine Control,” 15th IEEE Mediterr. Electrotech. Conf.,
pp. 1383–1388, 2010.
[54] S. Wu, Y. Wang, and S. Cheng, “Extreme Learning Machine Based Wind Speed
Estimation and Sensorless Control for Wind Turbine Power Generation System,”
Neurocomputing, vol. 102, pp. 163–175, 2013.
[55] V. Saberi Nasrabad, “Data-Driven Modeling of Wind Turbine Structural Dynamics and Its
Application to Wind Speed Estimation,” Master Thesis, University of Calgary, 2016.
[56] K. Z. Østergaard, P. Brath, and J. Stoustrup, “Estimation of Effective Wind Speed,” J.
Phys. Conf. Ser., vol. 75, 2007.
[57] K. Z. Østergaard, P. Brath, and J. Stoustrup, “Gain-Scheduled Linear Quadratic Control of
Wind Turbines Operating at High Wind Speed,” 16th IEEE Int. Conf. Control Appl., pp.
276–281, 2007.
[58] F. D. Kanellos and N. D. Hatziargyriou, “Optimal Control of Variable Speed Wind
Turbines in Islanded Mode of Operation,” IEEE Trans. Energy Convers., vol. 25, no. 4,
pp. 1142–1151, 2010.
[59] X. Fu, L. He, and H. Qiu, “MEMS gyroscope sensors for wind turbine blade tip deflection
measurement,” Conf. Rec. - IEEE Instrum. Meas. Technol. Conf., pp. 1708–1712, 2013.
[60] B. Basu, Z. Zhang, and S. R. K. Nielsen, “Damping of Edgewise Vibration in Wind

157
Turbine Blades by Means of Circular Liquid Dampers,” Wind Energy, vol. 19, pp. 213–
226, 2016.
[61] Matthew A. Lackner and G. van Kuik, “A Comparison of Smart Rotor Control
Approaches Using Trailing Edge Flaps and Individual Pitch Control,” Wind Energy, vol.
13, pp. 117–134, 2010.
[62] V. Maldoado, J. Farnsworth, W. Gressick, and M. Amitay, “Active Control of Flow
Separation and Strucural Vibrations of Wind Turbine Blades,” Wind Energy, vol. 13, no.
13, pp. 221–237, 2010.
[63] D. Tian, H. Lei, Y. Deng, Y. Jiang, and N. Wang, “Airfoil Dynamic Stall Research of
Wind Turbine,” 2nd IET Renew. Power Gener. Conf., 2013.
[64] H. Snel and J. G. Schepers, “Joint Investigation of Dynamic Inflow Effects and
Implementation of an Engineering Method,” Technical Report, ECN-C-94-107, 1995.
[65] M. M. Hammam, D. H. Wood, and C. Crawford, “Development Of an Analytical
Unsteady Model for Wind Turbine Aerodynamic Response to Linear Pitch Changes,” J.
Sol. Energy Eng., vol. 138, pp. 1–9, 2016.
[66] W. Johnson, Helicopter Theory. Courier Corporation, 2012.
[67] J. Gordon Leishman, Principles of Helicopter Aerodynamics. Cambrige University Press,
2000.
[68] H. Glauert, The Analysis of Experimental Results in The Windmill Brake and Vortex Ring
States of an Airscrew. London : HMSO, 1926.
[69] C. He, “Development and Application of a Generalized Dynamic Wake Theory for Lifting
Rotors,” PhD thesis, Georgia Institute of Technology, 1989.
[70] C. Garcia-Duffy, D. Peters, and R. Ormiston, “Optimum Rotor Performance in Skewed
Flow Based on Actuator-Disk Theory,” 27th AIAA Appl. Aerodyn. Conf., 2009.
[71] D. A. Peters and Z. Fei, “Applications and Data of Generalised Dynamic Wake Theory of
the Flow in a Rotor Wake,” IET Control Theory Appl., vol. 9, no. 7, pp. 1051–1057, 2015.
[72] L. Meirovitch, Element of Vibration Analysis. McGraw-Hill, 1986.
[73] W. Thomson, Theory of Vibration with Applications. CRC Press, 1998.
[74] V. B. Dhar, “A Simple Finite Element for the Dynamic Analysis of Rotating Composite
Beams,” Master Thesis, Virginia Polytechnic Institute and State University, 1990.
[75] S. V. Hoa, “Vibration of a Rotating Beam with Tip Mass,” J. Sound Vib., vol. 67, no. 3,
pp. 369–381, 1979.
[76] A. Korobenko, M.-C. Hsu, I. Akkerman, J. Tippmann, and Y. Bazilevs, “Structural
Mechanics Modeling and FSI Simulation of Wind Turbines,” Math. Model. Methods Appl.
Sci., vol. 23, no. 2, pp. 249–272, 2013.

158
[77] A. Korobenko, J. Yan, S. M. I. Gohari, S. Sarkar, and Y. Bazilevs, “FSI Simulation of
Two Back-to-Back Wind Turbines in Atmospheric Boundary Layer Flow,” Comput.
Fluids, 2017.
[78] Y. Bazilevs, A. Korobenko, X. Deng, J. Yan, M. Kinzel, and J. O. Dabiri, “Fluid–
Structure Interaction Modeling of Vertical-Axis Wind Turbines,” J. Appl. Mech., vol. 81,
2014.
[79] S. Guntur, J. M. Jonkman, B. Jonkman, Q. Wang, M. A. Sprague, M. Hind, R. Sievers,
and S. J. Schreck, “FAST v8 Verification and Validation for a MW-scale Wind Turbine
with Aeroelastically Tailored Blades,” 34th Wind Energy Symp., pp. 1–18, 2016.
[80] J.-W. Lee, J.-S. Lee, J.-H. Han, and H.-K. Shin, “Aeroelastic Analysis of Wind Turbine
Blades Based on Modified Strip Theory,” J. Wind Eng. Ind. Aerodyn., vol. 110, pp. 62–69,
2012.
[81] Q. Sun, “Dynamic Analysis of Flexible-link Cooperating Manipulators,” PhD thesis,
University of Victoria, 1996.
[82] C. Damaren and I. Sharf, “Simulation of Flexible-Link Manipulators with Inertial and
Geometric Nonlinearities,” J. Dyn. Syst. Meas. Control, vol. 117, no. 1, pp. 74–87, 1995.
[83] B. J. Jonkman, “TurbSim User ’s Guide,” Technical Report, NREL/TP-500-39797, 2009.
[84] S. M. Muyeen, M. H. Ali, R. Takahashi, T. Murata, and J. Tamura, “Damping of Blade-
shaft Torsional Oscillations of Wind Turbine Generator System,” Electr. Power
Components Syst., vol. 36, no. 2, pp. 195–211, 2008.
[85] P. Rosas, “Dynamic Influences of Wind Power on the Power System,” PhD Thesis,
Technical University of Denmark, 2003.
[86] F. D. Bianchi, H. De Battista, and R. J. Mantz, Wind Turbine Control Systems: Principles,
Modelling and Gain Scheduling Design. Springer, 2007.
[87] B. Friedland, Control System Design-an Introduction to State Space Methods. Dover
Publications. 1986.
[88] C. C. Johnson and R. T. Smith, “Dynamics of Wind Generators on Electric Utility
Networks,” IEEE Trans. Aerosp. Electron. Syst., vol. AES-12, no. 4, pp. 483–493, 1976.
[89] D. Ju and Q. Sun, “Wind Turbine Blade Flapwise Vibration Control Through Input
Shaping,” Int. Fed. Autom. Control, pp. 5617–5622, 2014.
[90] N. C. Singer and W. P. Seering, “Preshaping Command Inputs to Reduce System
Vibration,” J. Dyn. Syst. Meas. Control, 1988.
[91] N. C. Singer, “Residual Vibration Reduction in Computer Controlled Machines,” PhD
Thesis, Massachusetts Institute of Technology, 1989.
[92] M. Singh, “Dynamic Models for Wind Turbines and Wind Power Plants,” Technical
Report, NREL/SR-5500-52780, 2011.

159
[93] A. Wright, “Modern Control Design for Flexible Wind Turbines,” Technical Report,
NERL/TP-500-35816, 2004.
[94] A. D. Wright and L. J. Fingersh, “Advanced Control Design for Wind Turbines Part I :
Control Design, Implementation, and Initial Tests,” Technical Report, NREL/TP-500-
42437, 2008.

160
Appendix A: Legendre Polynomials and Functions
1. Legendre’s Equation and Legendre Functions
The second order differential equation given as
(1 − 𝑥2)
𝑑2𝑦
𝑑𝑥2− 2𝑥
𝑑𝑦
𝑑𝑥+ 𝑛(𝑛 + 1)𝑦 = 0 𝑛 > 0, |𝑥| < 1 (A.1)
is known as Legendre’s equation. The general solution to this equation is given as a function of
two Legendre functions as follows
𝑦 = 𝐴𝑃𝑛(𝑥) + 𝐵𝑄𝑛(𝑥) |𝑥| < 1 (A.2)
where
𝑃𝑛(𝑥) =
1
2𝑛𝑛!
𝑑𝑛
𝑑𝑥𝑛(𝑥2 − 1) 𝑛 (A.3)
𝑄𝑛(𝑥) =
1
2𝑃𝑛(𝑥)𝑙𝑛
1 + 𝑥
1 − 𝑥 (A.4)
𝑃𝑛(𝑥) is known as Legendre function of the first kind, and 𝑄𝑛(𝑥) is known as the Legendre
function of the second kind.
2. Legendre Functions of the First Kind
For the Legendre function of the first kind, if 𝑛 = 0,1,2,3⋯, the functions 𝑃𝑛(𝑥) are called
Legendre polynomials of order 𝑛. The first several Legendre polynomials are listed below
𝑃0(𝑥) = 1 (A.5)
𝑃1(𝑥) = 𝑥 (A.6)
𝑃2(𝑥) =
1
2(3𝑥2 − 1) (A.7)
𝑃3(𝑥) =
1
2(5𝑥3 − 3𝑥) (A.8)

161
𝑃4(𝑥) =
1
8(35𝑥4 − 3𝑥2 + 3) (A.9)
𝑃5(𝑥) =
1
8(63𝑥5 − 70𝑥3 + 15𝑥) (A.10)
The recurrence formula for the Legendre polynomial is
𝑃𝑛+1(𝑥) =
2𝑛 + 1
𝑛 + 1𝑥𝑃𝑛(𝑥) −
𝑛
𝑛 + 1𝑃𝑛−1(𝑥) (A.11)
𝑃𝑛+1′ (𝑥) − 𝑃𝑛−1
′ (𝑥) = (2𝑛 + 2)𝑃𝑛(𝑥) (A.12)
Higher order polynomials can be obtained by using the formulas provided in eqs. (A.11) and
(A.12). 𝑃𝑛(1) = 1 and 𝑃𝑛(−1) = (−1)𝑛.
Any function 𝑓(𝑥) which is finite and single-valued in the interval −1 ≤ 𝑥 ≤ 1, and which
has a finite number or discontinuous within this interval can be expressed as a series of Legendre
polynomials. If 𝑓(𝑥) is written as
𝑓(𝑥) = 𝐴0𝑃0(𝑥) + 𝐴1𝑃1(𝑥) + 𝐴2𝑃2(𝑥) + ⋯ =∑𝐴𝑛𝑃𝑛(𝑥)
∞
𝑛=0
− 1 ≤ 𝑥 ≤ 1 (A.13)
Multiplying both sides of eq. (A.13) by 𝑃𝑚(𝑥)𝑑𝑥 and integrating with respect to 𝑥 from
𝑥 = −1 to 𝑥 = 1 gives
∫𝑓(𝑥)𝑃𝑚(𝑥)𝑑𝑥
1
−1
= ∑𝐴𝑛 ∫𝑃𝑚(𝑥)𝑃𝑛(𝑥)𝑑𝑥
1
−1
∞
𝑛=0
(A.14)
Apply the orthogonality property of the Legendre polynomials to eq. (A.14), the following
expression can be obtained
𝐴𝑛 =2𝑛 + 1
2∫𝑓(𝑥)𝑃𝑛(𝑥)𝑑𝑥
1
−1
𝑛 = 0,1,2,3⋯ (A.15)

162
Since 𝑃𝑛(𝑥) is an even function of 𝑥 when 𝑛 is even, and an odd function when 𝑛 is odd,
it follows that if 𝑓(𝑥) is an even function of 𝑥, the coefficients 𝐴𝑛 will vanish when 𝑛 is odd;
whereas if 𝑓(𝑥) is an odd function of 𝑥, the coefficient 𝐴𝑛 will vanish when 𝑛 is even. Therefore
for an odd function 𝑓(𝑥) we have
𝐴𝑛 = {(2𝑛 + 1)∫ 𝑓(𝑥)𝑃𝑛(𝑥)𝑑𝑥
1
0
𝑛 𝑖𝑠 𝑜𝑑𝑑
0 𝑛 𝑖𝑠 𝑒𝑣𝑒𝑛
(A.16)
while for an even function 𝑓(𝑥) we have
𝐴𝑛 = {
0 𝑛 𝑖𝑠 𝑜𝑑𝑑
(2𝑛 + 1)∫ 𝑓(𝑥)𝑃𝑛(𝑥)𝑑𝑥1
0
𝑛 𝑖𝑠 𝑒𝑣𝑒𝑛 (A.17)
when 𝑥 = 𝑐𝑜𝑠𝜃 the function 𝑓(𝜃) can be written as
𝑓(𝜃) = ∑𝐴𝑛𝑃𝑛(𝑐𝑜𝑠𝜃)
∞
𝑛=0
(A.18)
where
𝐴𝑛 =2𝑛 + 1
2∫ 𝑓(𝜃)𝑃𝑛(𝑐𝑜𝑠𝜃)𝑠𝑖𝑛𝜃𝑑𝜃
𝜋
0
𝑛 = 0,1,2,3⋯ (A.19)
3. Legendre Functions of the Second Kind
A second and linearly independent solution of Legendre’s equation for positive values of 𝑛 are
called Legendre functions of the second kind and are defined by eq. (A.4). As can be seen from its
expression, it has logarithmic singularities at 𝑥 = ±1 and 𝑥 = 𝜋. The first few polynomials are
listed below
𝑄0(𝑥) =
1
2𝑙𝑛1 + 𝑥
1 − 𝑥 (A.20)

163
𝑄1(𝑥) = 𝑃1(𝑥)𝑄0(𝑥) − 1 (A.21)
𝑄2(𝑥) = 𝑃2(𝑥)𝑄0(𝑥) −
3
2𝑥 (A.22)
𝑄3(𝑥) = 𝑃3(𝑥)𝑄0(𝑥) −
5
2𝑥2 +
2
3 (A.23)
Equations (A.20)–(A.23) show that the even order functions to be odd in 𝑥 and the odd function
to be even in 𝑥. The higher order polynomials 𝑄𝑛(𝑥) can be calculated by means of recurrence
formulas exactly analogous to those for 𝑃𝑛(𝑥).
4. Legendre’s Associated Differential Equation
The differential equation
(1 − 𝑥2)
𝑑2𝑦
𝑑𝑥2− 2𝑥
𝑑𝑦
𝑑𝑥+ [𝑛(𝑛 + 1) −
𝑚2
1 − 𝑥2]𝑦 = 0 (A.24)
is known as Legendre’s associated differential equation. If 𝑚 = 0 in the above equation, the
differential equation reduces to Legendre’s equation. Solutions of the above equation called
associated Legendre function. In the following, the discussion is restricted to the important case
where and are non-negative integers. Under this assumption, the general solution can be written as
𝑦 = 𝐴𝑃𝑛𝑚(𝑥) + 𝐵𝑄𝑛
𝑚(𝑥) (A.25)
where 𝑃𝑛𝑚(𝑥) and 𝑄𝑛
𝑚(𝑥) are called the associated Legendre functions of the first and second kind
respectively. They are given in terms of ordinary Legendre functions
𝑃𝑛𝑚(𝑥) = (1 − 𝑥2)
𝑚2𝑑𝑚
𝑑𝑥𝑚𝑃𝑛(𝑥) (A.26)
𝑄𝑛𝑚(𝑥) = (1 − 𝑥2)
𝑚2𝑑𝑚
𝑑𝑥𝑚𝑄𝑛(𝑥) (A.27)

164
The 𝑃𝑛𝑚(𝑥) functions are bounded within the interval −1 ≤ 𝑥 ≤ 1 whereas functions 𝑄𝑛
𝑚(𝑥) are
unbounded at 𝑥 = ±1.
The recurrence formulas for 𝑃𝑛𝑚(𝑥) is expressed as
(𝑛 + 1 −𝑚)𝑃𝑛+1𝑚 (𝑥) = (2𝑛 + 1)𝑃𝑛
𝑚(𝑥) − (𝑛 + 𝑚)𝑃𝑛−1𝑚 (𝑥) (A.28)
Similar to the Legendre’s function, any function 𝑓(𝑥) which is finite and single-valued in
the interval −1 ≤ 𝑥 ≤ 1 can be written as a series of associated Legendre functions
𝑓(𝑥) = 𝐴𝑚𝑃1𝑚(𝑥) + 𝐴𝑚+1𝑃𝑚+1
𝑚 (𝑥) + 𝐴𝑚+2𝑃𝑚+2𝑚 (𝑥) +⋯ − 1 ≤ 𝑥 ≤ 1 (A.29)
where the coefficients are determined by the following equation
𝐴𝑘 =2𝑘 + 1
2
(𝑘 −𝑚)!
(𝑘 +𝑚)!∫𝑓(𝑥)𝑃𝑘
𝑚(𝑥)𝑑𝑥
1
−1
𝑛 = 0,1,2,3⋯ (A.30)

165
Appendix B: Ellipsoidal coordinate system (from [69])
The ellipsoidal coordinate system (𝜈, 𝜂, 𝜑) described in chapter 2 is defined such that
𝑥 = √1 − 𝜈2√1 + 𝜂2𝑐𝑜𝑠𝜑 (B.1)
𝑦 = √1 − 𝜈2√1 + 𝜂2𝑠𝑖𝑛𝜑 (B.2)
𝑧 = 𝜈𝜂 (B.3)
The (𝑥, 𝑦, 𝑧) coordinate system in the wind turbine follows the convention of the helicopter
industry. The 𝑥 − 𝑦 plane is parallel with the rotor plane, and the positive 𝑧 axis is perpendicular
to the rotor plane in the upwind direction. The ellipsoidal coordinate system will cover the entire
three dimensional space once and only once if the following conditions are satisfied:
−1 ≤ 𝜈 ≤ +1 (B.4)
0 ≤ 𝜂 ≤ ∞ (B.5)
0 ≤ 𝜑 ≤ 2𝜋 (B.6)
Figure B.1 shows the ellipsoidal coordinate system viewed in the 𝑥 − 𝑧 plane. The 𝜈 = 𝑐𝑜𝑛𝑠𝑡𝑎𝑛𝑡
surfaces are hyperboloids and the 𝜂 = 𝑐𝑜𝑛𝑠𝑡𝑎𝑛𝑡 surfaces are ellipsoids. Both surfaces are
azimuthally symmetric about the 𝑧 axis. 𝜑 is the azimuthal angle measured from the negative 𝑥
axis, counter-clockwise looking along the positive 𝑧 axis. The 𝜂 = 0 surface represents both sides
of the disk surface.

166
Appendix C: Distributed Blade Properties and Airfoil Data (Baseline blade, from FAST
[45])
Table C.1 Distributed Blade Properties
BlFract
(normalized)
Chord
(m)
StrcTwist
(degree)
BMassDen
(kg/m)
FlapStiffness
(Nm2)
EdgeStiffness
(Nm2)
0 1.5380 11.1 1447.607 7681460000 7681460000
0.02105 1.6430 11.1 180.333 1169870000 1169870000
0.05263 1.8020 11.1 181.672 1020620000 1092280000
0.10526 2.0680 11.1 183.905 771880000 962970000
0.15789 2.3340 11.1 186.138 523140000 833660000
0.21053 2.5940 11.1 188.370 274400000 704350000
0.26316 2.7220 9.50 178.321 234570000 614650000
0.31579 2.6280 7.90 168.271 194740000 524960000
0.36842 2.4910 6.30 158.222 154900000 435260000
0.42105 2.3530 4.70 148.172 115070000 345570000
0.47368 2.2160 3.10 138.123 75230000 255870000
0.52632 2.0780 2.60 122.896 62490000 217870000
0.57895 1.9410 2.10 107.669 49750000 179860000
0.63158 1.8040 1.60 92.442 37010000 141860000
0.68421 1.6670 1.10 77.215 24270000 103850000
0.73684 1.5310 0.60 61.988 11530000 65850000
0.78947 1.4010 0.48 51.861 9270000 54250000
0.84211 1.2770 0.36 41.734 7010000 42660000
0.89474 1.1540 0.24 31.607 4750000 31060000
0.94737 1.0290 0.12 21.4800 2490000 19470000
1 0.9054 0 11.353 230000 7870000
Four different blade airfoils have been used in different blade radial section. The lift and drag
coefficients for these airfoils are provided below.
Table C.2 The lift and drag coefficient of cylinder airfoil
Angle of attack (degree) 𝐶𝑙 𝐶𝑑
-180 0.0 0.5
0 0.0 0.5
180 0.0 0.5

167
Table C.3 The lift and drag coefficient of s818_2703 airfoil (Re = 4000000)
Angle of attack
(degree) 𝐶𝑙 𝐶𝑑
Angle of
attack
(degree)
𝐶𝑙 𝐶𝑑
-180 -0.170 0.0200 4 0.990 0.0096
-170 0.640 0.0500 5 1.100 0.0099
-160 0.840 0.3100 6 1.200 0.0103
-150 1.080 0.6200 7 1.310 0.0108
-140 1.150 0.9600 8 1.410 0.0113
-130 1.090 1.3000 9 1.510 0.0118
-120 0.880 1.5200 10 1.560 0.0194
-110 0.600 1.6600 11 1.610 0.0221
-100 0.310 1.7600 12 1.650 0.0245
-90 0.000 1.8000 13 1.650 0.0269
-80 -0.310 1.7600 14 1.630 0.0296
-70 -0.600 1.6600 15 1.620 0.0520
-60 -0.880 1.5200 30 1.080 0.6200
-50 -1.090 1.3000 40 1.150 0.9600
-40 -1.150 0.9600 50 1.090 1.3000
-30 -1.080 0.6200 60 0.880 1.5200
-20 -0.840 0.3100 70 0.600 1.6600
-10 -0.640 0.0144 80 0.310 1.7600
-8 -0.480 0.0124 90 0.000 1.8000
-6 -0.090 0.0082 100 -0.310 1.7600
-5 0.020 0.0082 110 -0.600 1.6600
-4 0.130 0.0082 120 -0.880 1.5200
-3 0.240 0.0082 130 -1.090 1.3000
-2 0.350 0.0086 140 -1.150 0.9600
-1 0.460 0.0086 150 -1.080 0.6200
0 0.570 0.0087 160 -0.840 0.3100
1 0.670 0.0088 170 -0.640 0.0500
2 0.780 0.0090 180 -0.170 0.0200
3 0.890 0.0093

168
Table C.4 The lift and drag coefficient of s825_2103 airfoil (Re = 3000000)
Angle of attack
(degree) 𝐶𝑙 𝐶𝑑
Angle of attack
(degree) 𝐶𝑙 𝐶𝑑
-180 -0.170 0.0200 4 1.090 0.0095
-170 0.640 0.0500 5 1.200 0.0098
-160 0.840 0.3100 6 1.300 0.0102
-150 1.080 0.6200 7 1.410 0.0107
-140 1.150 0.9600 8 1.490 0.0155
-130 1.090 1.3000 9 1.580 0.0179
-120 0.880 1.5200 10 1.660 0.0203
-110 0.600 1.6600 11 1.680 0.0250
-100 0.310 1.7600 12 1.700 0.0273
-90 0.000 1.8000 13 1.700 0.0297
-80 -0.310 1.7600 14 1.680 0.0324
-70 -0.600 1.6600 15 1.660 0.0520
-60 -0.880 1.5200 30 1.080 0.6200
-50 -1.090 1.3000 40 1.150 0.9600
-40 -1.150 0.9600 50 1.090 1.3000
-30 -1.080 0.6200 60 0.880 1.5200
-20 -0.840 0.3100 70 0.600 1.6600
-10 -0.640 0.0144 80 0.310 1.7600
-8 -0.480 0.0124 90 0.000 1.8000
-6 0.010 0.0074 100 -0.310 1.7600
-5 0.120 0.0075 110 -0.600 1.6600
-4 0.230 0.0077 120 -0.880 1.5200
-3 0.340 0.0078 130 -1.090 1.3000
-2 0.440 0.0080 140 -1.150 0.9600
-1 0.550 0.0082 150 -1.080 0.6200
0 0.660 0.0084 160 -0.840 0.3100
1 0.770 0.0086 170 -0.640 0.0500
2 0.880 0.0089 180 -0.170 0.0200
3 0.980 0.0091

169
Table C.5 The lift and drag coefficient of s826_1603 airfoil (Re = 3000000)
Angle of attack
(degree) 𝐶𝑙 𝐶𝑑
Angle of attack
(degree) 𝐶𝑙 𝐶𝑑
-180 -0.170 0.0200 4 1.1400 0.0082
-170 0.640 0.0500 5 1.250 0.0087
-160 0.840 0.3100 6 1.350 0.0104
-150 1.080 0.6200 7 1.440 0.0146
-140 1.150 0.9600 8 1.530 0.0184
-130 1.090 1.3000 9 1.630 0.0200
-120 0.880 1.5200 10 1.650 0.0219
-110 0.600 1.6600 11 1.670 0.0239
-100 0.310 1.7600 12 1.680 0.0262
-90 0.000 1.8000 13 1.670 0.0288
-80 -0.310 1.7600 14 1.650 0.0316
-70 -0.600 1.6600 15 1.630 0.0520
-60 -0.880 1.520 30 1.080 0.6200
-50 -1.090 1.3000 40 1.150 0.9600
-40 -1.150 0.9600 50 1.090 1.3000
-30 -1.080 0.6200 60 0.880 1.5200
-20 -0.840 0.3100 70 0.600 1.6600
-10 -0.640 0.0144 80 0.310 1.7600
-8 -0.480 0.0124 90 0.000 1.8000
-6 0.060 0.0092 100 -0.310 1.7600
-5 0.170 0.0082 110 -0.600 1.6600
-4 0.280 0.0067 120 -0.880 1.5200
-3 0.390 0.0068 130 -1.090 1.3000
-2 0.500 0.0069 140 -1.150 0.9600
-1 0.600 0.0070 150 -1.080 0.6200
0 0.710 0.0072 160 -0.840 0.3100
1 0.820 0.0074 170 -0.640 0.0500
2 0.930 0.0076 180 -0.170 0.0200
3 1.040 0.0078

170
Publications
D. Ju, Q. Sun, “Modeling of a Wind Turbine Rotor Blade System”, Journal of Vibration and
Acoustics, (Transactions of ASME), 2017.
D. Ju, Q. Sun, “Modeling and Dynamic Analysis of a Wind Turbine Rotor/Blade System”, 39th
Annual Training Conference, Indianapolis, IN, US, July 14-17, 2015.
D. Ju, Q. Sun, “Control of Wind Turbine Blade Flapwise Vibration Using Input Shaping Method”,
The 19th World Congress of the International Federation of Automatic Control, Cape Town, South
Africa, August 24-29, 2014.
D. Ju, Q. Sun, “Wind Turbine Blade Flapwise Vibration Control through Input Shaping”,
Canadian Machinery Vibration Association, Banff, Alberta, October 23-25, 2013.



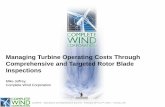






![[Us 2006] d517986 Wind Turbine and Rotor Blade of a Wind Turbine](https://static.fdocuments.in/doc/165x107/56d6c0731a28ab30169a6fcb/us-2006-d517986-wind-turbine-and-rotor-blade-of-a-wind-turbine.jpg)







