Model of Motorcycle Behaviour in Mixed Traffic - 2007
227
1 An Agent-Based Model to Simulate Motorcycle Behaviour in Mixed Traffic Flow Tzu-Chang Lee A thesis submitted for the degree of Doctor of Philosophy of the University of London and Diploma of the Membership of Imperial College London Centre for Transport Studies Department of Civil and Environmental Engineering Imperial College London, United Kingdom October 2007
-
Upload
nightowlfiles -
Category
Documents
-
view
87 -
download
2
Transcript of Model of Motorcycle Behaviour in Mixed Traffic - 2007

1
An Agent-Based Model to Simulate Motorcycle Behaviour
in Mixed Traffic Flow
Tzu-Chang Lee
A thesis submitted for the degree of Doctor of Philosophy of the University of London and Diploma of the Membership of Imperial College London
Centre for Transport Studies Department of Civil and Environmental Engineering
Imperial College London, United Kingdom
October 2007

2
Acknowledgements
I would like to express my heartfelt gratitude to my supervisors, Professor John
Polak and Professor Michael Bell. Their full support, inspiring guidance and warm
encouragement have enabled me to overcome the confusion and difficulties that have
been encountered throughout the study. In addition, my sincere appreciation goes to
Professor Marcus Wigan, the visiting professor of the Centre for Transport Studies, for
his continued and invaluable support.
I would like to thank the Ministry of Education of Taiwan for the scholarship, which
made this thesis possible.
I am deeply grateful to the members of the Centre for Transport Studies, in
particular, Jackie, Jan-Dirk, Robin, Steve, Kriangkrai, KyoungA, Walter, Wat, Zia… for
their friendship, companionship and assistance.
Very special thanks go to my parents, relatives and friends in Taiwan who were
always in touch during my stay in England and encouraged me to keep going through
those good and not so good times.
Final and special mention must go to my wife for being there and supporting me all
the time. She has made this journey a less lonely one.

3
Abstract
Motorcycles have constituted a significant proportion of the total traffic stream in
many countries. They possess several unique features which lead them to exhibit erratic
and chaotic trajectories when making progress in traffic. However, the conventional
traffic flow theories and traffic simulation models seem to place less consideration on the
uniqueness of motorcycles. This may cause such theories and models to have difficulties
when describing mixed traffic. In order to take this gap into consideration, this study was
conducted to investigate the effects of motorcycles on the traffic flow. The following
procedure was adopted:
Firstly, the unique behaviour patterns of motorcycles were characterised. Further
analyses were carried out to extract the fundamental elements which cause the unique
behaviour. As the complexity theory assumes that complexity can emerge from simple
rules, this study then further suggested that the motorcycle behaviour can be described by
modelling these basic elements.
Secondly, three models were developed to describe motorcycle movements, namely
the longitudinal headway model, the oblique & lateral headway model and the path
choice model. The longitudinal headway model focused on describing the phenomenon
that a motorcycle will maintain a shorter headway when aligning to the edge of the
preceding vehicle. The oblique & lateral headway model described the headway
distribution of motorcycles when they are following the preceding vehicles obliquely.
The path choice behaviour was modelled by using a multinomial logit model which
described the dynamic virtual lane-based movements of motorcycles.
Thirdly, these three models were calibrated separately. The first and the second
models were calibrated by using the Bayesian analysis due to their non-linearity and
complexity. The last model was calibrated by the maximum likelihood estimation of

4
utility models. The data for the calibration were collected by using the video recording
methods. The vehicular trajectories from the video footage were extracted by using a
software package developed by this study.
Finally, an agent-based traffic simulator was built to represent the motorcycle
behaviour in mixed traffic flow. The mathematical models developed for describing the
motorcycle behaviour were implemented in this simulator. Through the verification
process, this simulation system showed that it was able to work as intended and represent
the characteristic behaviour patterns of motorcycles. Three applications of this simulator
were presented to show that this simulator was able to carry out policy tests and was a
powerful tool for conducting a study on mixed traffic flow containing motorcycles.

5
Table of Contents
Acknowledgements..........................................................................................................2
Abstract............................................................................................................................3
Table of Contents.............................................................................................................5
List of Figures ..................................................................................................................8
List of Tables..................................................................................................................10
1 Introduction..................................................................................................12 1.1 Background....................................................................................................12 1.2 Objectives of this thesis .................................................................................14 1.3 Structure of this thesis ...................................................................................15
2 The Characteristic Behaviour of Motorcycles ..........................................17 2.1 Introducing the characteristic behaviour of motorcycles...............................17
2.1.1 The observations from literature....................................................................18 2.1.2 The observations of this study .......................................................................20 2.1.3 Significance of motorcycles’ characteristic behaviour ..................................21
2.2 The differences between motorcycles and passenger cars ............................24 2.3 The behaviour patterns to be modelled..........................................................28 2.4 Summary........................................................................................................31
3 Review of Driving Behaviour Modelling ...................................................32 3.1 Conventional car-following and lane-changing models ................................32
3.1.1 Car-following models ....................................................................................33 3.1.2 Lane-changing models...................................................................................40 3.1.3 Summary........................................................................................................46
3.2 Modelling of mixed traffic flow containing motorcycles..............................46 3.2.1 Microscopic approaches ................................................................................47 3.2.2 Macroscopic approaches................................................................................53 3.2.3 Summary........................................................................................................55
3.3 Conclusions and discussions .........................................................................55
4 The Models ...................................................................................................57 4.1 The longitudinal headway model ..................................................................57
4.1.1 The minimum following distance without swerving manoeuvres.................57 4.1.2 The minimum following distance with swerving manoeuvres......................59 4.1.3 The minimum longitudinal following distance of a motorcycle ...................62 4.1.4 Summary........................................................................................................62

6
4.2 The oblique & lateral headway model...........................................................63 4.2.1 The oblique headway.....................................................................................63 4.2.2 The lateral headway.......................................................................................65 4.2.3 Summary........................................................................................................66
4.3 The path choice model...................................................................................66 4.4 Conclusions ...................................................................................................70
5 Data Collection.............................................................................................71 5.1 Types of data required ...................................................................................71 5.2 Data collection method..................................................................................72
5.2.1 Video data versus floating-car data ...............................................................73 5.2.2 Choosing the data collection method.............................................................74 5.2.3 Accuracy of the data acquired by the video recording method .....................75
5.3 Data collection...............................................................................................75 5.3.1 Video recording equipment ...........................................................................76 5.3.2 Time and site of the data survey ....................................................................77 5.3.3 The data extracting system ............................................................................81
5.4 The database ..................................................................................................89 5.4.1 Preliminary data processing...........................................................................89 5.4.2 Description of the database............................................................................92 5.4.3 Accuracy of the database ...............................................................................93
5.5 Summary........................................................................................................97
6 Model Calibration........................................................................................98 6.1 The longitudinal headway model ..................................................................98
6.1.1 Data selection ................................................................................................98 6.1.2 Properties of the longitudinal headway .......................................................100 6.1.3 Specification of the longitudinal headway model .......................................106 6.1.4 The calibration results ................................................................................. 115
6.2 The oblique & lateral headway model.........................................................124 6.2.1 Data selection ..............................................................................................124 6.2.2 Properties of the oblique headway...............................................................125 6.2.3 Specification of the oblique & lateral headway model................................127 6.2.4 The calibration results .................................................................................131
6.3 The path choice model.................................................................................139 6.3.1 Data selection and the data set.....................................................................139 6.3.2 The calibration tool......................................................................................144 6.3.3 The calibration results .................................................................................145
6.4 Discussion....................................................................................................152 6.4.1 Tackling the systematic error of the data.....................................................153 6.4.2 Comparisons between the assumptions of non-lane-based movements and

7
dynamic virtual lane-based movements of motorcycles..............................154 6.4.3 Comparison between the conventional Stochastic Frontier Analysis and
the approach proposed in this section..........................................................157 6.4.4 The advantage of the data collection method ..............................................160
7 The Agent-Based Traffic Simulator .........................................................162 7.1 Agent-based modelling................................................................................162
7.1.1 The agent and agent-based modelling .........................................................162 7.1.2 Agent-based modelling and traffic simulation ............................................164 7.1.3 Agent-based modelling for this study..........................................................167 7.1.4 Selecting the agent-based modelling tool for this study..............................170
7.2 The simulator ...............................................................................................173 7.2.1 The agents....................................................................................................174 7.2.2 The environment..........................................................................................177 7.2.3 The interaction rules ....................................................................................178 7.2.4 The user interface ........................................................................................186 7.2.5 The schedule of activity...............................................................................187 7.2.6 Summary......................................................................................................188
7.3 Verification ..................................................................................................189 7.3.1 Representation of the characteristic behaviour of motorcycles...................189 7.3.2 The effects of the dynamic virtual lane based models.................................191 7.3.3 The cooperation between vehicles...............................................................193 7.3.4 Headway distribution...................................................................................193 7.3.5 The fundamental diagrams of the traffic flow .............................................194
7.4 The applications...........................................................................................195 7.4.1 The scenario settings ...................................................................................195 7.4.2 The effects of the installation of a motorcycle lane.....................................196 7.4.3 The effects of the installation of an advanced stop line...............................199 7.4.4 The PCU values of motorcycles ..................................................................202
7.5 Summary......................................................................................................206
8 Conclusions and Recommendations for Further Work .........................207 8.1 Summary of research ...................................................................................207 8.2 Recommendations for further work............................................................. 211
References ....................................................................................................................214

8
List of Figures
Figure 2.1 The congested mixed traffic at an intersection in Taipei, Taiwan .................23
Figure 2.2 The motorcycle storage behind the stop line in Taipei, Taiwan.....................23
Figure 2.3 Factors leading to the characteristic behaviour of motorcycles.....................29
Figure 2.4 The regimes of the interactions between passenger cars and motorcycles....31
Figure 3.1 The family of the models for vehicular movements ......................................32
Figure 4.1 The minimum following distance of motorcycles .........................................59
Figure 4.2 The space-time trajectories showing minimum following distance of a motorcycle.......................................................................................................60
Figure 4.3 The schematic diagram of the oblique following relationship ......................64
Figure 4.4 The schematic diagram of the oblique following distance ............................65
Figure 4.5 The schematic diagram of the overtaking relationship..................................66
Figure 4.6 The schematic diagram of the path choice decision ......................................68
Figure 5.1 Data collection and processing sequence ......................................................76
Figure 5.2 The lens distortion test of Sony DCR-HC32 .................................................77
Figure 5.3 The schematic diagram of the survey site......................................................79
Figure 5.4 Images for extracting trajectories and measuring vehicle dimensions ..........81
Figure 5.5 Screenshot of the new data collection system ...............................................82
Figure 5.6 The schematic diagram of the measured dimensions of vehicles..................84
Figure 5.7 The conversion of the coordinates between the video image and the real world ...............................................................................................................85
Figure 5.8 The animated display of the extracted trajectories ........................................89
Figure 5.9 The conceptual illustration of the steering direction .....................................91
Figure 5.10 The conceptual illustration of the body direction ........................................91
Figure 5.11 The errors caused by perspective and sight angles ......................................95
Figure 6.1 The schematic diagram of the longitudinal following relationship ...............99
Figure 6.2 The scatter plots of the longitudinal following relationship........................101
Figure 6.3 The frequency distributions of the longitudinal headways..........................103

9
Figure 6.4 The calibration of the longitudinal headway model using WinBUGS ........ 117
Figure 6.5 The frequency distributions of the oblique headways .................................126
Figure 6.6 The calibration of the oblique & lateral headway model using WinBUGS 132
Figure 6.7 The contours of the marginal distribution of the oblique & lateral headway model.............................................................................................................137
Figure 6.8 The minimum following distance under the non-lane based assumption....155
Figure 6.9 The conceptual illustration of Equation (6.60) ............................................156
Figure 7.1 The decision-making process of the mid-term plan ....................................183
Figure 7.2 The decision-making process of motorcyclists............................................185
Figure 7.3 The screenshot of the agent-based simulation system developed in this study..............................................................................................................186
Figure 7.4 Time-space plot of the trajectories in mixed traffic flow ............................190
Figure 7.5 Time-space plot of the trajectories in homogeneous traffic flow ................192
Figure 7.6 The communication and cooperation behaviour of vehicles .......................193
Figure 7.7 The frequency distributions of the longitudinal headways..........................194
Figure 7.8 The schematic diagrams of the simulation scenarios for motorcycle lanes.197
Figure 7.9 The comparison of the fundamental diagrams between with and without the installation of a motorcycle lane .............................................................198
Figure 7.10 The schematic diagrams of the simulation scenarios for advanced stop lines ...............................................................................................................200
Figure 7.11 The comparison of the fundamental diagrams between with and without the motorcycle reservoir................................................................................201
Figure 7.12 The fundamental diagrams under different traffic compositions...............203
Figure 7.13 The comparison of flow-density relations under different traffic compositions .................................................................................................204
Figure 7.14 The flow rates and PCU values from the simulation results .....................204

10
List of Tables
Table 3.1 Factors affecting lane-changing behaviour .....................................................41
Table 5.1 The resolution of the video images .................................................................83
Table 5.2 The list of reference points..............................................................................87
Table 5.3 Numbers of vehicles surveyed ........................................................................93
Table 6.1 The statistical properties of the longitudinal headways by lateral position difference.......................................................................................................102
Table 6.2 The statistical properties of the longitudinal headways by flow density ......105
Table 6.3 The statistical properties of the longitudinal headways by speed difference 105
Table 6.4 The statistical properties of the longitudinal headways by leading speed ....105
Table 6.5 Calibrating results of the longitudinal headway model (left half) ................120
Table 6.6 Calibrating results of the longitudinal headway model (right half) ..............121
Table 6.7 The statistical properties of the oblique headways........................................126
Table 6.8 Calibrating results of the oblique & lateral headway model using the elliptic model.............................................................................................................133
Table 6.9 Calibrating results of the oblique & lateral headway model using the triangular model ............................................................................................134
Table 6.10 Calibrating results of the oblique & lateral headway model using the triangular model with linear shape parameter...............................................135
Table 6.11 Comparisons between the estimated and the observed statistics of the oblique following behaviour .........................................................................136
Table 6.12 Errors of the estimation results....................................................................136
Table 6.13 The sample frequencies of the alternatives .................................................142
Table 6.14 The multinomial logit model for path choice behaviour .............................145
Table 6.15 Estimation results for the path choice model ..............................................146
Table 6.16 Estimation results for the refinements of the path choice model ................148
Table 6.17 Refined multinomial logit model for path choice behaviour ......................152
Table 6.18 Estimation results for the refined path choice model ..................................152
Table 6.19 Comparison of the calibration results between the conventional stochastic frontier analysis and the approach used in this study....................................159

11
Table 7.1 Comparisons of the specifications between models......................................181
Table 7.2 Specifications of the scenarios ......................................................................196

12
1 Introduction
This study aims to develop a microscopic simulation model for describing the
motorcycle behaviour in mixed traffic flow by using the technique of agent-based
modelling. The term ‘motorcycle’ here refers to any single-track two-wheeled motor
vehicle, with a speed which is competent to overtake other vehicles in urban networks.
Following this definition, vehicles such as heavy motorcycles, scooters, mopeds and
motorised-bicycles are categorised as motorcycles.
In this first chapter, the orientation of this thesis will be described. It starts with the
background to this topic, particularly the necessity of understanding motorcycle
behaviour from the standpoint of traffic management. The objectives of this study are
then described. The structure of this thesis is provided at the end of this chapter.
1.1 Background
Motorcycles have been an important mode of transport in South East Asia for
decades. They account for around half of the road traffic in many Asian cities (Gwilliam,
2003). For example, in Vietnam, more than 75% of the traffic consisted of motorcycles
(Gwilliam, 2003; Hsu et al., 2003; Nguyen and Montgomery, 2006; Minh et al., 2006),
whilst in urban area of Malaysia, around 39% of the traffic were composed of
motorcycles (Hsu et al., 2003). In other countries, 46% of traffic in Taipei, Taiwan (Hsu et
al., 2003), 79%i in Lao (Hussain et al., 2005), 75%i in Cambodia (Hussain et al., 2005)
and 73% i of traffic in Indonesia (Hussain et al., 2005) were motorcycles. Moreover,
motorcycle ownership in Kaohsiung, Taiwan, was as high as 0.75 per capita in 2005
(CEPD, 2006). In Bangkok, motorcycles accounted for 40% of the registered vehicles in
i Based on the data of Hussain et al (2005), it included motorcycles and three-wheeled vehicles.

13
2003 (Sano et al., 2005).
In addition to these ‘motorcycle-driven societies’ (JBIC, 1999) in Asia, other areas
also see the active presence of motorcycles. For example, motorcycles act as a mode of
paratransit service to deliver people and goods in Nigeria, Uganda and Kenya (Fasakin,
2002; Howe, 2003; Kisaalita and Sentongo-Kibalama, 2007). Passenger transport by
motorcycle is popular in Italy and Greece (EEA, 2003). In Italy, for example, motorcycles
accounted for 11.5% of vehicle mileage on roads in 1994 (Hurdle, 1997). Furthermore,
there are signs that the use of motorcycles as a transport mode is growing in some areas of
Europe and Australia. In Greece and Luxembourg, the motorcycle ownership increased
by 118% and 116% respectively between 1990 and 1998 (EEA, 2001). Yannis et al. (2007)
reported that this upward trend of motorcycle ownership was still continuing in Greece.
Also, the passenger transport by motorcycle showed a strong growth in Denmark and
Portugal between 1994 and 2000 (EEA, 2003), while the average growth of motorcycle
traffic in the European Union (EU-15) reached 18% during this period. The total
motorcycle registrations in New South Wales, Australia increased by 14% from 1995 to
2000 (De Rome et al., 2002). In the United Kingdom, registered motorcycles had
increased by 36% from 1993 to 2001 (DfT, 2004) and motorcycle traffic had increased by
34% between 1993 and 2002 (Huang and Preston, 2004). With this increase of
motorcycle usage, the necessity for considering the role of motorcycling in an integrated
transport policy cannot be overlooked, something that has been pointed out by many
studies (e.g. DETR, 1998; Wigan, 2000; Martin et al., 2001; Robertson, 2002; DfT,
2004).
Motorcycles possess several unique features such as narrow width, small size, high
power-to-weight ratio and intuitive steering. All this may lead them to have more freedom
in a traffic stream and also perform some characteristic behaviour patterns in mixed
traffic flow. For example, motorcycles generally present more complex behaviour than

14
passenger cars do, exhibit more erratic and chaotic trajectories when making progress,
and do not always follow the lane disciplines strictly. However, the conventional traffic
flow theories and traffic simulation models seem to put their main focus on passenger
cars and, accordingly, place less consideration on the uniqueness of motorcycles. This
may cause such theories and models to have difficulties when describing mixed traffic
(Ahuja, 2001) and assessing the influence of motorcycles upon the traffic flow,
particularly in busy urban networks or in a congested stream. Under such circumstances
the differences in behaviour between motorcycles and passenger cars become more
obvious due to their different natures.
Motorcycles have constituted a significant proportion of the total traffic stream in
many countries and, still, have been poorly represented in existing traffic flow theories
and simulation software. In order to take this gap into consideration, this study is
conducted to investigate the effects of motorcycles on the traffic flow. In stead of
considering motorcycles as small passenger cars, the movements of motorcycles are
analysed focusing on their unique features. The results of this study can facilitate mixed
traffic management for those motorcycle-driven societies and clarify the role of
motorcycles in integrated transport policy for the Western countries.
1.2 Objectives of this thesis
The aim of this study is to demonstrate a new approach to the modelling of
motorcycle behaviour in mixed traffic flow. The necessity for an in-depth analysis of this
issue has been briefly discussed above and will be more fully explained in the remainder
of this thesis. In order to achieve the aim of this study, there are four research objectives
identified:
1) Characterise motorcycle behaviour patterns;
2) Identify the gaps and weaknesses in current microscopic treatments for

15
simulating motorcycles in traffic flow;
3) Develop models to describe the characteristic behaviour of motorcycles; and
4) Develop a traffic simulation system capable of representing motorcycle
behaviour.
1.3 Structure of this thesis
This thesis comprises eight chapters which explicitly explain the steps taken to
achieve the objectives mentioned above. Each chapter consists of several subsections,
starting with an introduction that describes the structure of the chapter and ending with a
summary which identifies the main issues raised in the chapter. The thesis is organised as
follows:
Chapter 1 introduces the overall context of this study, states the research objectives
and provides the structure of this thesis.
Chapter 2 characterises the behaviour of motorcycles. It analyses the causes of their
unique behaviour patterns and summarises the essential factors leading to the
characteristic behaviour. This chapter then indicates a direction and provides a basis for
the model developments.
Chapter 3 focuses on reviewing the traffic simulation techniques. Studies concerned
with the car-following models, the lane-changing models and the mixed traffic flow
modelling are reviewed and discussed.
Chapter 4 develops three mathematic models to describe motorcycle behaviour.
These models describe the longitudinal following relationship, the lateral and oblique
following relationship, and the path choice behaviour of motorcycles.
Chapter 5 describes the data collection method adopted by this study.
Chapter 6 describes the model calibration process. Such a process includes data
cleaning, data analysing, model specification and the selection of the calibration tools.

16
The calibration results of the three mathematical models developed in this study are
presented.
Chapter 7 presents an agent-based traffic simulation model. The above
mathematical models are embedded in this simulation system to direct the actions and
interactions of the agents. Three applications of this system are demonstrated at the end of
this chapter.
Finally, Chapter 8 outlines the conclusions of this study and makes suggestions for
future work.

17
2 The Characteristic Behaviour of Motorcycles
This chapter aims to provide an in-depth analysis of motorcycles’ particular
behaviour and to prepare the ground for the model developments in Chapter 4. It is
observed that motorcycles exhibit characteristic movements which are distinct from those
of passenger cars. These movements however, seem to be less considered in microscopic
traffic models (this point will be explored in Chapter 3). This can cause such models
difficulties in representing motorcycles in mixed traffic. To take this into account, the first
step is to characterise motorcycles’ behaviour patterns and analyse the fundamental
elements contributing to the unique behaviour.
This chapter starts with a description of motorcycles’ characteristic behaviour. The
comparison between motorcycles and passenger cars is then provided. Finally, the
fundamental behaviour patterns which contribute to the characteristic movements of
motorcycles are extracted.
2.1 Introducing the characteristic behaviour of motorcycles
In traffic flow, motorcyclists tend to adopt an active driving style, make progress by
making use of opportunities (Martin et al., 2001) and exhibit characteristic movements
which are distinct from the typical movements of passenger cars. These characteristic
movements will now be introduced in the following three subsections. The first
subsection reviews the relevant literature related to this topic. Then, the observations
from this study will be detailed in the second subsection. Based on the discussions of the
above two subsections, an identification of the characteristic behaviour patterns of
motorcycles is provided in the last subsection.

18
2.1.1 The observations from literature
The behavioural differences between motorcycles and passenger cars have been
discussed in many studies. These behaviour patterns include:
� Travelling alongside another vehicle in the same lane
It is common for a motorcyclist to share the lateral lane space with other vehicles
because the width of a motorcycle (0.75 m) accounts for only around 25% of the lane
width (3 m). Many studies have observed this behaviour pattern. For example, Branston
(1977) investigated the headway of vehicles and reported that the measurement of
motorcycles’ headways was difficult because of their ability of travelling alongside
another vehicle in the same lane. Other studies such as Robertson (2003), Chandra and
Kumar (2003), Arasan and Koshy (2003), Cho and Wu (2004) and Minh et al. (2006)
have also described this behaviour pattern.
� Oblique following
Motorcycle can follow another vehicle at an oblique position due to their
narrowness and small size. As the typical width of a lane is far larger than the need of
motorcycles, they do not necessarily keep to the centre of a lane. As a result, when
following a vehicle, motorcycles enjoy the freedom to choose the lateral positions in a
lane. Thus, it is often to observe that a motorcycle follows a vehicle at an oblique position.
By doing so, the motorcyclist can get a better field of view and have a better chance to
filter, overtake or avoid a potential collision. Robertson (2003) described this following
pattern as “echelon formation”. Arasan and Koshy (2003) reported that the vehicles in
mixed traffic had “zero headways”. Although they did not mention the reasons, such short
headways could be due to motorcycles’ oblique following or lateral following. Cho and
Wu (2004) described this behaviour pattern when they tried to model the motorcycle
behaviour in mixed-traffic flow.

19
� Filtering
Filtering is the behaviour of moving through the lateral clearances between slow
moving or stationary vehicles. It can be considered as a series of overtaking movements
by using dynamic virtual lanes. Such behaviour pattern has been pointed out in many
studies (e.g. Hurdle, 1997; Oketch, 2000; Wigan, 2001; Robertson, 2002; MRA, 2006).
Due to the narrowness of motorcycles, they enjoy the advantage of filtering through the
traffic under the situations that cars cannot (Elliott et al., 2003). Minh et al. (2006) tried to
employ the concept of ‘dynamic lane’ to describe the filtering behaviour of motorcycles.
� Moving to the head of a queue
Motorcycles have the advantage of moving to the head of a queue due to their
ability of filtering. At the beginning of a green light, the motorcycle tends to enjoy a short
start-up time to pass the intersection. May and Montgomery (1986) observed this
phenomenon and reported that the motorcycles leaving the intersection with the first 6 sec
of the green time would not affect the capacity of the intersection. Powell (2000)
developed a regression model to describe this behaviour pattern (more details will be
discussed in Chapter 3). In the simulator of Oketch (2000), the widths of standard
vehicles were defined to be smaller at standstill to allow motorcycles to filter to the head
of the queue. In addition, other studies such as Rongviriyapanich and Suppattrakul (2005)
and Minh et al. (2006) developed models to describe the behaviour of motorcycles at an
intersection. Moving to the head of a queue was also listed as one of the significant
behaviour types of motorcycles in Robertson’s study (2002).
� Swerving or weaving
Swerving or weaving is a typical behaviour pattern of motorcycles which mixed
longitudinal and lateral movements. When a motorcyclist is weaving in and out of the
traffic, it seems that the vehicles in his surroundings are able to cooperate with this

20
particular behaviour pattern. Hurdle (1997), Robertson (2002) and Minh et al. (2006)
have introduced this behaviour pattern. It is sometimes followed by an overtaking or
filtering movement.
� Tailgating
According to Arasan and Koshy (2003) and Minh et al. (2005b), motorcyclists were
likely to maintain short following distances than do car drivers. In addition, Horswill and
Helman (2003) found that motorcycles were more likely to pull out into small gaps. It
seems that motorcycles have higher tolerance for a small following distance. However, it
is still not clear about the reason behind motorcyclists’ tailgating behaviour.
2.1.2 The observations of this study
In addition to the behaviour observed from literature, other types of behaviour are
also identified by this study.
� Maintaining a shorter headway when aligning to the lateral edge of the preceding
vehicle
Motorcycles follow the preceding vehicles in a two-dimensional manner and the
lateral movement within a lane does affect their manoeuvres. This study has found that a
motorcycle tended to have a shorter headway while following the preceding vehicle by
aligning to its lateral edge. This is because when a motorcyclist progresses by the strategy
of collision avoidance, aligning to the lateral edge of the preceding vehicle can shorten
the safety gap since he can swerve away easily.
� Travelling according to the virtual lanes formed dynamically by the vehicles in
surroundings
In urban networks, motorcycles do not progress fully following the lane marks as
they have less lane discipline than passenger cars have. Instead, they are likely to move

21
according to the virtual lanes formed dynamically by the vehicles in their surroundings.
For example, when a motorcyclist is progressing alongside another vehicle in the same
lane, his movements are constrained by the vehicles aside. Also, a wide lateral clearance
between vehicles becomes a virtual lane for a motorcycle to go through. Therefore, the
clearances in a motorcycle’s surroundings provide potential paths for it to make progress
in traffic.
� Self-organisation phenomena
A cluster of motorcycles in mixed traffic can easily present ‘herd behaviour’, i.e.
they can act together without prior arrangements. An example of this is the cycle of
filtering-gathering-dispersing of motorcycles. In a congested intersection, motorcycles
can filter to the head of the queues. Subsequently, motorcycles will gather into a cluster
behind the red light. At the start of the green periods, they burst by using higher
accelerations, then dispersing into the traffic stream and moving towards the next
intersection. This cycle can be viewed as the phenomena of self-organisation.
2.1.3 Significance of motorcycles’ characteristic behaviour
According to the findings in the literature and the observations from this study, the
unique behaviour patterns of motorcycles can be summarised. Also, the significance of
these behaviour patterns is described.
2.1.3.1 Characterising the behaviour patterns
The characteristic behaviour of motorcycles mentioned in Sections 2.1.1 and 2.1.2
is summarised as follows:
1) Travelling alongside another vehicle in the same lane
2) Moving to the head of a queue
3) Filtering

22
4) Swerving or weaving
5) Tailgating
6) Oblique following
7) Maintaining a shorter headway when aligning to the lateral edge of the preceding
vehicle
8) Travelling according to the virtual lanes formed dynamically by the vehicles in
surroundings
9) Self-organisation phenomena
The above list concludes the observations of motorcycles’ behaviour patterns
mentioned in the literature and observed in this study. Most of the characteristic
behaviour patterns of motorcycles, from the viewpoint of microscopic traffic modelling,
have been included in this list.
2.1.3.2 Significance of the behaviour patterns
It is believed that the behaviour patterns mentioned in the preceding section play an
important role in mixed traffic containing motorcycles, particularly in congested traffic.
Although little study has assessed the impacts of these behaviour patterns on the traffic,
their significant influences are commonly observed. Two figures are employed to
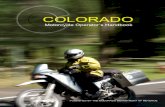
illustrate this point. Figure 2.1 shows the saturated flow at the beginning of the green light
at an intersection in Taipei. By comparing the four photos in this figure, the difference of
the traffic patterns among the passenger car flow, the mixed flow and the homogeneous
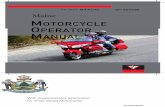
motorcycle flow can be observed. Figure 2.2 display the motorcycle storage behind the
stop line and the filtering behaviour of motorcycles.

23
Figure 2.1 The congested mixed traffic at an intersection in Taipei, Taiwan
Figure 2.2 The motorcycle storage behind the stop line in Taipei, Taiwan
The behaviour patterns mentioned in Section 2.1.3.1 are presented in these photos.
For example, Figure 2.2 presents the filtering behaviour and the phenomenon of moving
to the head of queues. Figure 2.1 shows the difference in the way passenger cars and
(a) (b)
(c) (d)

24
motorcycles maintain safety clearances. The behaviour patterns such as riding abreast in
the same lane, oblique following and close following can be observed in these photos. In
addition, Figure 2.1a shows the ‘swarming’ phenomenon of a cluster of motorcycles. It is
worthwhile to point out that the behaviour of maintaining a shorter headway when
aligning to the edge of the preceding vehicle is the key factor to cause this phenomenon.
Based on the above analyses, it would be safe to assert that the presence of
motorcycles has a significant impact on the traffic density and the flow pattern because of
their unique behaviour patterns. However, the conventional vehicular models cannot
describe them. In order to simulate the behaviour of motorcycles in the mixed traffic flow,
it is critical to develop tailor-made models for describing these particular behaviour
patterns. The first step towards this objective is to characterise the essential differences
between motorcycles and passenger cars. This will be elaborated in the following
sections.
2.2 The differences between motorcycles and passenger cars
The physical, psychological and mechanical differences between different vehicle
types will give rise to different behaviour. This section will focus on discussing the
essential differences between motorcycles and passenger cars from several viewpoints.
� Field of view
The motorcyclist has a wider field of view than the car driver does. The car driver’s
field of view is obstructed by the frame of the windscreen, the crumble zone, the doors
and the facilities in the cabin. Consequently, those blind spots cause difficulties in
assessing the exact clearances around his vehicle. In contrast, the motorcyclist has a wider
field of view, so he can assess the gaps more precisely.
The difference in the field of views between vehicle types would affect the
behaviour of their drivers. When a driver cannot observe his gap ahead clearly, he would

25
maintain a larger safety margin. This is usually the reason why the car drivers tend to
maintain larger safety margins than do the motorcyclists. According to the observation of
this study, the difference could be up to 1 m, albeit no direct evidences. This difference
usually could be omitted in the studies of free flow, but it plays an important role in the
studies of congested urban networks because it facilitates motorcyclists’ tailgating,
weaving and filtering behaviour. Therefore, it is believed that the wider field of view of
the motorcycle contributes to its characteristic behaviour.
� Size
The narrowness and small size of a motorcycle contributes to its distinctive
behaviour. A motorcycle is usually around 0.75 m wide by 1.6 m long. This size is much
smaller in comparison with the size of a car, which is around 1.6 m wide by 4.3 m long.
Based on its small size, the motorcycle can exploit the road space which is usually
unusable for a passenger car. For example, a motorcycle can filter through a slow moving
flow by using the clearance between two parallel cars. It can also weave in and out of a
stationary flow via the safety margins between vehicles.
� Weight
Not only the small size but also the light weight achieves the agility of the
motorcycle. A motorcycle is much lighter than a car. With the light weight of a
motorcycle, the rider can move his body to facilitate his manoeuvre. In addition, the light
weight causes the higher power-to-weight ratio of the machine (Elliott et al., 2003). As a
result, a motorcyclist is likely to feel it easier to achieve high accelerations,
psychologically or mechanically. Hsu et al. (2003) mentioned that motorcycles enjoy a
burst at the beginning of a green light at a signalised intersection. Their view provides an
evidence for this point.

26
� The manoeuvring methods
Being a single-track vehicle, the motorcycle is steered by using the handlebar and
the movement of the rider’s body. By the delicate interaction between man and machine,
the motorcycle and its rider is considered to be a man-machine system (Sharp, 2001) to
exhibit some agile movements. However, a passenger car can be manoeuvred only by
using the steering wheel. By comparing the manoeuvring methods of these two vehicle
types, the motorcycle is comparatively intuitive, straightforward and precise. These
characteristics can often influence the behaviour of motorcycles.
� Turning radii
The turning radii of motorcycles are much smaller than those of passenger cars due
to the differences in size and the manoeuvring system. This may lead to the agility of
motorcycles and further facilitates their swerving behaviour.
� Acceleration
Motorcycles were found to enjoy a burst at the beginning of a green light at a
signalised intersection, but their acceleration would be lower than the cars’ acceleration
when their speeds were above 40 km/h (Hsu et al., 2003).
� Braking deceleration
The physical mechanism of applying brakes of a motorcycle is complicated. A
motorcyclist needs highly developed manoeuvring skills to exhaust the maximum
braking capability of the machine. Ecker et al. (2001) conducted an experiment and found
that common motorcyclists could only achieve an average braking deceleration of around
-6.19 m/sec2, which was only 56% of the maximum deceleration capability of the
machine (around -11 m/sec2, Biokinetics and Associates Ltd, 2003). Vavryn and
Winkelbauer (2004) obtained similar results and the maximum deceleration velocity in
their tests was -6.6 m/sec2. However, the value varied slightly with factors such as the

27
familiarity with the vehicle, the training of riders, the condition of the road surface and
types of braking systems. Regarding passenger cars, the mechanical maximum braking
capability was around -10 m/sec2 (quoted by Ecker et al., 2001).
The major difference in the braking behaviour between the single-track and
double-track vehicles is that there is a psychological and technical hurdle for
motorcyclists to achieve the maximum braking, whereas this is not the case for car drivers,
who can exhaust the maximum braking capability easily.
� Reaction time
Since motorists and motorcyclists have different the field of views and
manoeuvring methods, there would be some differences between their reaction times.
However, no study focusing on this issue has been conducted. Green (2000) reviewed the
studies concerning the reaction time of car drivers and concluded that when fully aware, it
was around 0.70 to 0.75 sec, whereas it was 1.25 to 1.5 sec in unexpected situations.
Gipps (1981) applied 0.66 sec to the reaction time in his following model. In a survey of
the reaction time of the motorcycles, Tang (2003) reported that the reaction time of
motorcycles was 0.7 to 0.9 sec. Hsu et al. (2003) observed that motorcycles had a shorter
reaction time at the start of the green time. In addition, Minh et al. (2006) used following
distances, speeds and acceleration rates to calculate the reaction times of motorcycles and
found that the average reaction time was 0.52 sec. Generally speaking, the reaction time
for the vehicle drivers, including motorcyclists, is around 0.5 sec to 1.5 sec.
� Headway
A few studies have focused on comparing the following distance between
motorcycles and passenger cars and indicated that motorcyclists tend to maintain smaller
headways than do car drivers. For example, Branston (1977) measured the headway of
motorcycles on motorways and found it was 0.6 to 0.9 times shorter than that of cars

28
(quoted in Wigan, 2000). Ahuja (2001) indicated that the gaps accepted by motorcycles
were extremely small. Horswill and Helman (2003) pointed out that motorcyclists tended
to pull out into smaller gaps frequently. Arasan and Koshy (2003) reported that the
heterogeneous flow had extremely short headways. In addition, Minh et al. (2005b) found
that the 50% of the motorcycles in their surveys had time headways between 0.5 sec and
1.0 sec, which were only half of the headways of passenger cars.
In addition to the longitudinal headway, motorcycles can ride alongside other
vehicles within the same lane. Thus, the lateral gap, or lateral headway, is a unique
kinematic parameter of them. Minh et al. (2005a), Hussain et al. (2005) and Minh et al.
(2006) have investigated the width of the path required for motorcycles. From their
results, the minimum lateral gap that a motorcyclist needs was around 0.5 m.
� Speed
Hsu et al. (2003) quoted an observation which indicated that the speeds of
motorcycles were higher than the speeds of cars at the beginning of the green light, but
were lower in mid stream. Also, motorcycles had a higher speed in narrow streets.
Horswill and Helman (2003) analysed the results both from laboratory experiments and
from roadside observations, concluding that motorcyclists would like to choose faster
speeds than car drivers would. Statistic results in the United Kingdom showed that
motorcycle speeds are about the same as car speeds (DfT, 2005b). DfT
2.3 The behaviour patterns to be modelled
According to the basic assumption of complexity theory, complexity can emerge
from simple rules (Bar-Yam, 1997; Anderson, 1999). Thus, it is assumed that the
motorcycle behaviour can be generated by modelling some key elements. In order to
extract these key elements, the causal relationships among these behaviour patterns are
clarified. In addition, the essential differences discussed in Section 2.2 are linked to the

29
behaviour patterns to support and rationalise the model developments.
� Identification of the key behaviour patterns
The characteristic behaviour patterns of motorcycles can be generally categorised
into two types. The first type describes how a motorcycle reacts to another vehicle. It is a
one-on-one vehicular relationship such as the longitudinal following, oblique following,
overtaking, etc. The second type is the multi-vehicular relationship which describes how
a motorcycle reacts to several vehicles in its surroundings. Such interactions include the
filtering behaviour, swerving behaviour and path choice behaviour.
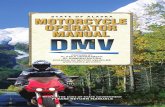
Figure 2.3 shows how the key differences contribute to the characteristic behaviour
of motorcycles. In addition, the relationships between the one-on-one vehicular
interactions and the multi-vehicular interactions are also presented. The arrows in this
diagram represent the causal relationships between the elements.
Figure 2.3 Factors leading to the characteristic behaviour of motorcycles
Oblique & lateral headway model
Longitudinal headway model
Moving to the head of a queue
Travelling alongside another vehicle in the same lane
Filtering
Swerving or weaving
Tailgating
Oblique following
Maintain a shorter headway when aligning to the edge of the preceding vehicle
Wider field of view
Small size
Lighter weight
Intuitive steering method
Small turning radius
Basic feature One-on-one vehicular interaction
Multi-vehicular interaction
Path choice model Travelling according to the dynamic virtual lanes

30
In Figure 2.3, some relationships have been discussed in the literature. For example,
Elliott et al. (2003) have observed the light weight and the narrowness contribute to a
motorcycle’s high acceleration and filtering behaviour. Some relationships are explicit
and straightforward. For instance, the links among the vehicle sizes, the oblique
following behaviour, riding abreast in the same lane, filtering and moving to the head of
queues are commonly observed and easily understood.
However, some relationships proposed in this study seem plausible, but further
research is needed. The mechanism for maintaining a shorter headway when aligning to
the edge of the preceding vehicle, and the factors contributing to the dynamic virtual
lane-based movements should be investigated to offer a whole picture the motorcycles’
characteristic behaviour patterns. Moreover, it is found that most of the multi-vehicular
interactions are built on the one-on-one vehicular interactions. Therefore, to build a
simulation system to depict the motorcycle behaviour, three models are indispensable,
namely the oblique & lateral headway model, the longitudinal headway model and the
path choice model.
� Description of the key behaviour patterns
Of these three models described above, the longitudinal headway model and the
oblique & lateral headway model depict the vehicle-following relationship. The former
describes how a motorcyclist reacts to another vehicle when he is progressing directly
behind this vehicle. The latter integrates the relationships of oblique following,
overtaking and travelling alongside another vehicle, detailing the reaction of a
motorcyclist when he is following at the rear left or rear right of another vehicle, or
progressing alongside another vehicle. The regimes of these two types of
vehicle-following relationships are shown in the conceptual illustration in Figure 2.4. The
boundaries of these regimes are defined according to the edges of the leading vehicle and
the width of the following motorcycle.

31
The path choice model represents how a motorcyclist makes a decision on whether
or not to make a lateral movement. The alternatives of the choice set are defined
according to the edges of the leading vehicle and the width of the following motorcycle,
as shown in Figure 2.4. These three models will be elaborated more fully in Chapter 4.
Figure 2.4 The regimes of the interactions between passenger cars and motorcycles
2.4 Summary
This chapter first characterised nine unique behaviour patterns of motorcycles. The
differences between motorcycles and passenger cars were then compared and the factors
contribute to these behaviour patterns were analysed. Finally, the fundamental elements
which led to the characteristic behaviour of motorcycles were extracted.
The analyses of this chapter showed that there were significant behavioural
differences between motorcycles and passenger cars. These outcomes implied that in
order to represent the mixed traffic flow accurately in a simulation model, the
fundamental elements which caused the characteristic behaviour of motorcycles should
be captured in the model. These key behaviour patterns could be described by three
models: the longitudinal headway model, the oblique & lateral headway model and the
path choice model. The developments of these models are presented in Chapter 4.
Longitudinal following
Oblique following
Oblique following
Overtaking
Overtaking
Path choice w
w/2
w/2

32
3 Review of Driving Behaviour Modelling
This chapter reviews the models that have been developed to describe vehicular movements
in traffic flow. Section 3.1 discusses the models aiming at describing the car-following and
lane-changing behaviour. Section 3.2 reviews the studies focusing on mixed traffic modelling,
particularly the traffic containing motorcycles. Section 3.3 provides a summary of this chapter.
3.1 Conventional car-following and lane-changing models
The studies concerning developing the models for describing the vehicular
movements in traffic flow have been emphasised for more than half a century (Pipes,
1953; Brackstone and McDonald, 1999). Being the fundamental elements of traffic flow
studies and simulations, a large number of models have been developed in this field.
Comprehensive reviews of these models can be found in many studies, for example,
Brackstone and McDonald (1999), Ahmed (1999), Hoogendoorn and Bovy (2001),
Olstam and Tapani (2004), and Toledo (2007). Based on their reviews, a general picture
of different models can be depicted, as illustrated in Figure 3.1.
Figure 3.1 The family of the models for vehicular movements
Models for vehicular movements
Car-following models
Cellular automata models
Free acceleration models
Safety distance or collision avoidance models
Other models
General Motors nonlinear models
Psychophysical or action point models
Fuzzy logic models Lane-changing models

33
In the following subsections, the car-following models and the lane-changing
models are reviewed. Discussions focusing on the feasibility of applying these models to
motorcycle behaviour simulations are then provided at the end of each subsection.
3.1.1 Car-following models
Car-following models describe the interaction between adjacent vehicles in the
same lane (Brackstone and McDonald, 1999). These models, providing the foundation
for traffic simulation systems, are the major part of the microscopic vehicular movements
modelling. Three featured models of this category, the General Motors nonlinear models,
the collision avoidance models, the psychophysical models are reviewed more fully
below in order to facilitate a deeper understanding of the car-following models.
3.1.1.1 General Motors nonlinear models
The General Motors nonlinear model (GM model), or sometimes referred to as the
GHR (Gazis-Herman-Rothery) models (Brackstone and McDonald, 1999), stemmed
from a series of studies conducted at the General Motors research labs in Detroit in the
late 1950s (Chandler et al., 1958; Gazis et al., 1959; Gazis et al., 1961). This type of
models assumes that the following behaviour is stimulated by the changes of the driving
condition. The acceleration of the following vehicle is influenced by the speed of the
preceding vehicle, and the speed difference and the headway between the vehicle pair.
The most general formulation is:
)()(
)()(ττα γ
β
−∆−∆=
txtv
tvtan
nnn , where
(3.1)
an(t): the acceleration of vehicle n implemented at time t,
vn(t): the speed of vehicle n implemented at time t,
�xn: the headway between vehicle n and vehicle n-1,

34
�vn: the speed difference between vehicle n and vehicle n-1,
�: the driver reaction time, and
�, � and �: parameters.
A great deal of studies has been worked on the calibration and validation of the GM
models. However, this type of models is now being used less frequently. The main reason
is the uncertainty of the parameter values, i.e. a large number of contradictory calibration
results about the parameters have been found (Brackstone and McDonald, 1999). The
limitations of the GM models and the concerns about applying them to the motorcycle
movement modelling are discussed below.
� Discussions
There are some limitations of the GM models:
1) The main criticism applied to the GM models is the lack of conclusive evidence
for the model formation, which might be one of the reasons leading to the demise
of this type of models (Brackstone and McDonald, 1999). Although a wide
variety of the calibration results of the parameters �, � and � can be obtained from
studies, it is difficult to validate these results since these parameters do not link
directly to the identifiable characteristics of drivers.
2) Whether the drivers can perceive and react to small changes of the spacing or
speeds is a question, particularly when the spacing is large.
3) Another drawback is that when the speed difference between the related vehicles
is 0, the estimated acceleration of the following vehicle will be 0. As a result, the
speed of the following vehicle will stay at the same level once there is no speed
difference to its preceding vehicle.
In addition, when applying the GM models to the simulation of motorcycle
behaviour, some issues should be taken into consideration:

35
4) The GM models do not consider the interaction between the longitudinal
headway and the lateral position. Therefore, some behaviour patterns of
motorcycles cannot be described properly, for example, oblique following and
maintaining a shorter headway when aligning to the lateral edge of the preceding
vehicle.
5) It is uncertain whether motorcycles exhibit the car-following phenomenon (or the
oscillating phenomenon) as they have the freedom of lateral movements. In fact,
points 4) and 5) are also the limitations of other car-following models.
6) Lan and Chang (2004) found that the GM models poorly described the vehicle
following behaviour of motorcycles. This finding was based on an empirical
study focusing on the following behaviour of motorcycles. The trajectory data of
motorcycles were surveyed and the results showed that the GM model did not fit
the field data well.
7) The parameters of the GM models vary with traffic conditions (Brackstone and
McDonald, 1999). However, the manoeuvres of motorcycles are highly sensitive
to the local environment. The parameters need to be estimated according to the
motorcycle behaviour in different local driving conditions. Such calibration
work will be resource-demanding.
3.1.1.2 Collision avoidance models
The collision avoidance models assume that the following vehicle will maintain a
safety distance to the vehicle in front and will select its speed to ensure the vehicle can
stop safely to avoid a rear-end collision. Such models (e.g. Kometani and Sasaki, 1959;
Gipps, 1981) are developed based on the equations of motion. However, this type of
models has been criticised in that the vehicles cannot react properly to the unexpected
movement of the preceding vehicles. For example, it is easy to cause a rear-end collision
when the preceding vehicle brakes suddenly (Brackstone and McDonald, 1999). To

36
tackle this issue, Gipps (1981) developed a model within which the extra safety reaction
time and safety headway margin were introduced. The parameters in his following model
corresponded to the characteristics of drivers directly and thus were not necessary to be
calibrated. When realistic values were assigned to the parameters, this model was able to
represent the characteristics of real traffic flow such as the propagation of disturbances.
The Gipps-like model has played an important role in the field of traffic simulation and
also has been employed in many traffic simulation packages, for example, MULTSIM
(Gipps, 1986b), SUMO (Krauss, 1998), AIMSUN (Barceló, 2001) and SIGSIM (Silcock,
1993).
In addition to describing the longitudinal following behaviour, the collision
avoidance models can be adapted to describe the lateral movement of vehicles. Gunay
(2007) tried to integrate the lateral offset of the following vehicle into the Gipps
following model. This study could be the first one to discuss the two-dimensional
movement of car-following behaviour. It also shows that the collision avoidance models
allow the flexibility in altering the kinematic properties.
Brackstone et al. (2002) found that the minimum desired following distance was far
lower than believed when they investigate the parameters for the action point model (see
Section 3.1.1.3). Therefore, they questioned that Newtonian mechanics could fail to
describe such a short headway. This finding offered a challenge to the validity of the
collision avoidance models. However, when a driver is following closely, he should be
more alert and his reaction time would be shorter than usual. In addition, if the driver
expects a low deceleration difference to the preceding vehicle, an extremely short
headway still can be described by a collision avoidance model.
� Discussions
The collision avoidance models are developed based on the equations of motion. A
limitation of this type of models is that they have difficulties in considering the conditions

37
of several cars down stream (Brackstone and McDonald, 1999) because the equations of
motion cannot describe the interactions to the vehicles prior to the preceding vehicle.
Gipps following model is the most important one of the collision avoidance models.
This model asserted that its parameters did not need to be calibrated. Such an assertion,
however, can be argued. Although most of the parameters (such as speeds and
accelerations) can be measured according to the local traffic conditions since they
correspond to the realistic behaviour of drivers directly, some latent and unobservable
parameters (such as the reaction time, the extra safety reaction time and safety headway
margin) still need to be calibrated. Gipps dealt with this issue by suggesting that the
values of these parameters could be assigned arbitrarily or obtained from other studies. In
fact, the model would be able to describe the drivers’ behaviour better if the values of the
latent variables were obtained from a calibration process.
The Gipps following model is appropriate for describing the tailgating behaviour of
motorcyclists due to the assumption on which this model is based. When a vehicle is
following the leader closely, it will select the following speed and following distance
according to the principle of collision avoidance. This principle tends to be adopted by
most motorcyclists when they are progressing in congested traffic, particularly in urban
networks. Therefore, Gipps following model seems to be an ideal tool for simulating
motorcycle behaviour in mixed traffic.
Another merit of the Gipps following model is that it is easy to be modified. This
model is developed based on the basic physical theories and the realistic parameter values.
Therefore, the parameter values are still valid after this model is modified according to
the equations of motion.
3.1.1.3 Psychophysical (action point) models
The psychophysical models (Leutzbach and Wiedemann, 1986) assume that drivers
control their acceleration by perceiving the related speed according to the change of the

38
visual angle of the preceding vehicle and keep their safety distance by setting a threshold.
This concept was first brought up by Michaels (1963). As drivers have difficulties in
detecting the subtle change of the spacing headway, the following vehicles may drift
around the spacing-based threshold. Thus, this type of models is able to represent the
phenomenon of oscillation or ‘following spiral’, which has been observed in many
studies (Brackstone et al., 2002). The action point models have been employed in a
number of traffic simulation packages, for example, PARAMICS (Fritzsche, 1994;
Cameron and Duncan, 1996) and VISSIM (Fellendorf and Vortisch, 2001).
� Discussions
The basic assumption of this type of models can describe the features in daily
driving behaviour properly. However, the parameters of the models have not yet been
calibrated empirically. Most of the perceptual thresholds in studies are arbitrarily derived
from the human factors literature (Toledo, 2007). This seems not strong enough to either
prove or disprove the validity of this model (Brackstone and McDonald, 1999).
When applying the psychophysical models to the simulation of motorcycle
behaviour, a critical challenge facing the underlying assumption of this type of models is
whether the motorcycles exhibit the oscillating phenomenon? As they do not necessarily
stick to the same lateral positions, they are able to move laterally when crossing the
deceleration perceptual threshold, rather than applying brakes. An evidence for this
argument is given in Lan and Chang (2004) who pointed out that only 13.8% of the
observed motorcycles exhibited the vehicle following behaviour in their field survey. In
addition, it could be a more comfortable lateral position for a motorcyclist to align to the
edge of the preceding vehicle (as discussed in Section 2.1.2). Thus, when the concept of
action point is applied to the motorcycles, decelerating seems not to be the only choice
when exceeding the threshold. Instead, lateral moving is more likely to be the choice.

39
3.1.1.4 Comparison of car-following models
Many studies have been conducted to compare the performances of the
car-following models. Bloomberg and Dale (2000) compared the performance of the
cellular automata model (CORSIM) and the action point model (VISSIM) on a congested
network. They found that both models were appropriate for modelling congested
conditions, but each has specific strengths and limitations for some specific scenarios.
Brockfeld et al. (2004) used the data collected by DGPS-equipped cars (differential
global positioning system) to calibrate the models including the GM model (MITSIM,
Yang, 1997), the Gipps following model, the cellular automata model (CA0.1, Nagel and
Schreckenberg, 1992) and the action point model (PARAMICS). They concluded that no
model could be denoted to be the best. However, the complex models likely had the
problem of ‘over-fitting’, which meant that a complex model could fit a particular
situation extremely well, but was not capable of generalising to other situations. Punzo
and Simonelli (2005) also drew similar conclusions from their study.
Panwai and Dia (2005) evaluated the performance of the Gipps-like model
(AIMSUN) and two action point models (PARAMICS and VISSIM) on congested traffic.
They concluded that PARAMICS and VISSIM fitted the data of following distances
better than the Gipps-like model did. However, AIMSUN and VISSIM fitted the speed
difference and described the pattern of following spiral better than PARAMICS did. The
authors did not further discuss the reason why PARAMICS could not represent the
following spiral well since the action point models were specified to represent the
phenomenon of oscillation or following spiral.
� Discussions
From the comparisons conducted by the above studies, it is found that the
car-following behaviour varies with traffic conditions and the properties of drivers. Each
type of models has specific strengths and limitations for some specific scenarios. In

40
addition, a more complex model could not be a more generalised one to other conditions.
Therefore, in order to simulate the motorcycle behaviour in mixed traffic flow properly,
to select or develop models which are able to capture the characteristics of motorcycles,
and to obtain a highly detailed database of the vehicle trajectories for calibrating the
models are both critical issues.
3.1.2 Lane-changing models
The lane-changing models describe the lateral movements of vehicles. Such
behaviour consists of two steps: the lane selection process and the execution process,
which are represented by the lane selection models and the gap acceptance models
respectively. These two types of models will be introduced here.
3.1.2.1 Lane selection models
The lane selection behaviour is modelled according to the motivation of drivers.
Different types of motivations may lead to different specifications of the lane selection
models and the gap acceptance models. This review will not address the details of the
model specifications, but will discuss the lane selection models from the aspects of cause
variables, model types and calibration techniques.
� Factors affecting lane-changing behaviour
A driver’s lane-changing behaviour can be traced to several reasons. For example,
the driving condition of the current lane is not satisfactory; the target lane has a better
driving condition or the target lane is the approach to the intended turn. These cause
variables that affect the lane selection behaviour can be divided into four categories. In
each category, the variables considered in the literature are summarised in Table 3.1:

41
Table 3.1 Factors affecting lane-changing behaviour
Category Factor Study Type of the subject vehicle
- Vehicle type (heavy vehicle or not) Ahmed (1999)
The driving conditions of the target lane
- Speed (potential speed) Gipps (1986a); Fritzsche (1994); FHWA (1996); Yang (1997); Ahmed (1999); Hidas (2002, 2005)
- Nearside or offside (slow or fast lane) Sparmann (1978); Oketch (2000)
- The location of the obstruction on the target lane (or lane blockage, queuing length)
Sparmann (1978); Gipps(1986a); Fritzsche (1994); Oketch (2000); Hidas (2002, 2005)
- The presence of heavy vehicles Gipps (1986a); FHWA (1996); Hidas (2002)
The driving conditions of the current lane
- The location of the obstruction on the current lane (or lane blockage, lane drop, lane merging, queuing length)
Sparmann (1978); Gipps (1986a); FHWA (1996); Yang (1997); Oketch (2000); Hidas (2002, 2005)
- Headway Sparmann (1978) ; Fritzsche (1994); FHWA (1996); Wei (2000)
- Regulations (or lane use restriction, bus lane, shared straight-turning lane)
Gipps (1986a); Yang (1997); Hidas (2002, 2005)
- Speed (current speed, desired speed, potential speed, speed difference)
Sparmann (1978); Gipps (1986a) ; Fritzsche (1994); FHWA (1996); Yang (1997); Ahmed (1999); Oketch (2000); Hidas (2002, 2005)
- The presence of heavy vehicles (or slow vehicles)
Gipps (1986a); Yang (1997); Ahmed (1999); Oketch (2000); Hidas (2005)
- Traffic density Yang (1997)
Destination - Distance (or time) to the intended turn Gipps (1986a); FHWA (1996); Yang (1997); Wei (2000); Oketch (2000); Hidas (2002, 2005)
- Number of lane changes required FHWA (1996); Yang (1997), Ahmed (1999)
� Model types
The lane selection models can largely be divided into two groups according to the
technique employed to decide the choice behaviour: the deterministic rule-based models
and the random utility models. The former employs a set of rules to describe the choice
behaviour. For example, in a study conducted in 1978 (cited in Toledo, 2007), Sparmann
linked the lane-changing behaviour to the locations of obstructions which were described
by psychophysical thresholds. Fritzsche (1994) and the traffic simulation software,

42
CORSIM (FHWA, 1996), also assumed that the lane-changing behaviour was triggered
by thresholds of speeds and headways. Gipps (1986a) developed a lane-changing model
by using a set of decision rules. In his model, the drivers selected the lane according to the
priority of these rules. Oketch (2000) used fuzzy logic rules to describe the lane-changing
decisions. Hidas (2002) employed a similar model to describe the lane-changing
behaviour. In addition, Wei et al. (2000) conducted an empirical study and developed a set
of decision rules to describe the lane-changing behaviour in two-lane urban arterials. Gipps, 19 86a
The random utility models for describing the lane selection behaviour have mainly
been developed in MIT (Massachusetts Institute of Technology). Yang (1997), Ahmed
(1999) and Toledo (2003) have used random utility models to describe the lane-changing
behaviour. They regarded the lane-changing behaviour as a sequence of decision-making
processes, in which three steps were involved, including the decision for changing lane,
the choice of the target lane and the gap acceptance in the target lane. The discrete choice
model framework was used to model the drivers’ lane-changing decision process.
� Model calibration
The parameters of rule-based models have seldom been calibrated due to the model
structure. The decision rules for these models are developed according to the observations
of researchers. Gipps (1986a) and Hidas (2002) did not offer frameworks for estimating
the model parameters. Wei et al. (2000) linked the lane-changing behaviour to the
distance to the intended turn and the headways. They estimated the thresholds of
headways by using vehicular trajectory data.
The technique of random utility modelling provides a neat approach to model
calibration. The model calibration processes of Yang (1997), Ahmed (1999) and Toledo
(2003) were conducted by the maximum likelihood approach based on vehicular
trajectory data.

43
� Discussions
From the studies mentioned above, there are some issues which are worthwhile to
be noted and discussed to facilitate the development of the models in this study.
1) The studies reviewed have similar opinions on the factors causing lane-changing
behaviour (see Table 3.1). However, since these studies were conducted in
different environmental contexts, the model types they adopted were also
different.
2) The rule-based models have several advantages: a) easy to understand and
practice, b) easy to adjust the model and c) capable of being applied to a complex
environment. However, their disadvantages are: a) no solid framework for
calibrating the model parameters has been proposed and b) the interactions
between different rules were not considered in these models (Toledo, 2007).
3) The random utility modelling is suitable for describing the lane selection process
because lane selection is a kind of discrete choice based on the competition
between the utilities of driving on different lanes. In addition, this technique
provides a neat approach to model calibration. However, the model specification
and calibration process for a random utility model is resource-demanding. Also,
it is still not clear whether its model parameters are portable or not. Therefore,
this type of models seems not appropriate to be applied in large scale urban
networks with complicated contexts.
4) The lane selection models for cars must be modified before being applied to
motorcycles. These models are developed based on the lane-based environment
for cars. However, motorcycles travel according to the virtual lanes in their
surroundings. For describing the lateral movements of motorcycles, such a
characteristic should be taken into account.

44
3.1.2.2 Gap acceptance models
Gap acceptance models have been developed since the 1960s (Herman and Weiss,
1961; Ahmed, 1999). The basic gap acceptance models were formulated as a binary
choice problem. These models assumed whether the gap was accepted or not was
determined by comparing the available gap and the critical gap. More specifically,
Herman and Weiss (1961) assumed that the critical gap was exponentially distributed. In
addition, Drew et al. (1967) assumed a lognormal distribution; Miller (1972) assumed it
to be normally distributed.
The influence of different factors upon the gap acceptance behaviour of drivers has
been discussed by many studies. For example, Daganzo (1981) used a multinomial probit
model to estimate the parameters of the gap acceptance behaviour. His model considered
the variations of both the critical gaps and the drivers. Mahmassani and Sheffi (1981)
found that the number of rejected gaps had a significant impact on critical gaps due to the
impatience of drivers. Madanat et al. (1994) used the queuing time to investigate the
effects of impatience on gap acceptance behaviour. Moreover, Cassidy (1995) indicated
that the fit of the model could be improved by differentiating the first gap from the
subsequent gaps and the gaps in the inner lane from those in the outer lane. Other
parameters affecting the gap acceptance behaviour found in the literature included the
type of manoeuvres, speeds of vehicles, geometric characteristics and sight distances, the
type of control in the intersection, the presence of pedestrians, police activities and
daylight conditions (Toledo, 2007).
When applying the gap acceptance behaviour to the lane-changing manoeuvre, both
the lead gap (the gap to the oblique front vehicle in the target lane) and the lag gap (the
gap to the oblique rear vehicle in the target lane) are important factors. Gipps (1986a)
used the deceleration rate of the lag vehicle (the oblique rear vehicle in the target lane) as
the threshold of the gap acceptance behaviour. This threshold was calculated by the

45
braking deceleration that the lag vehicle had to apply to react to the presence of the new
preceding vehicle. Ahmed (1999) developed a discrete choice model to describe the gap
acceptance behaviour. His model allowed different sets of parameters for both the
mandatory lane change and the discretionary lane change situations. The former situation
had lower critical gaps than the latter situation due to the fact that drivers under the
mandatory lane-changing conditions usually behave more aggressively.
In congested traffic, the headways between vehicles are small. Thus, the acceptable
gaps may not be available. Under such circumstances, a successful lane-changing
manoeuvre relies on the cooperation between the subject vehicle and the lag vehicle. The
factors influencing the lane-changing behaviour are the lead relative speed, the distance
in which the lane change must be completed, the length of the gap and the aggressiveness
of the subject and the lag drivers (Ahmed, 1999, Hidas, 2002).
� Discussions
There are two significant differences in the gap acceptance behaviour between car
drivers and motorcyclists. First, for motorcycles and passenger cars, their requirements
for the lateral width of the gap are different. The lateral width of the gap needed for a car
is generally equal to the width of the lane. However, the lateral width of the gap that a
motorcyclist requires is narrower because he can travel alongside other vehicles. Thus, a
motorcycle can easily merge into a congested main road at a non-signalised junction by
using the road shoulder or some lateral clearances, but under similar traffic conditions, a
passenger car has to queue for an accepted gap. This characteristic gives motorcycles
much more flexibility in determining the accepted gap.
The other significant difference to be pointed out is that the differentiation between
the driving conditions, such as the mandatory and discretionary lane changes, is not a
critical issue for motorcycles. The main reason is that motorcycles have more lateral
freedom in traffic flow. In addition, their accepted gaps are extremely small (Ahuja, 2001)

46
and narrow (as described above) and so they are more likely to pull out into small gaps
(Horswill and Helman, 2003). As a result, the gap acceptance behaviour of motorcycles
could be more relevant to their aggressive levels, rather than their driving conditions.
3.1.3 Summary
The findings of the reviews above can be concluded and summarised as follows:
1) The conventional car-following and lane-changing models are developed based
on the assumption of lane-based flow. These lane-based models cannot describe
the characteristic behaviour patterns of motorcycles properly. The main reason is
that the lateral position of the motorcycle is more likely to be a continuous
variable rather than a discrete variable. This phenomenon is commonly observed
in congested urban networks where motorcycles usually make progress without
considering much of the lane discipline. As a sequence, it seems inappropriate to
apply these conventional models to mixed traffic flow.
2) Models that fail to describe the characteristic behaviour of motorcycles could
cause serious errors in the estimation of mixed traffic flow, particularly when the
number of motorcycles is large or when the flow is crowded. For example, the
motorcycle behaviour such as filtering, progressing alongside another vehicle in
the same lane, tailgating by aligning to the lateral edge of the preceding vehicle
and oblique following will increase the flow density significantly. Thus, the
capacity of the flow will be underestimated when these behaviour patterns are
not considered in the traffic simulation models.
3.2 Modelling of mixed traffic flow containing motorcycles
The techniques used to simulate motorcycle behaviour in mixed traffic are reviewed
below. These techniques are divided into two groups: the microscopic approaches and the

47
macroscopic approaches. This section starts with the introduction of the category of
microscopic approaches and ends with a detailed account of the macroscopic approaches.
3.2.1 Microscopic approaches
The microscopic models describing the motorcycle behaviour in mixed traffic flow
are divided into three categories: the lateral moving models, the longitudinal moving
models and the cellular automata models. These models will be introduced in turn.
3.2.1.1 Lateral moving models
The conventional lane-changing models which describe the lane-based movements
of vehicles are unsuitable for describing the lateral movements of motorcycles (see
Section 3.1.2). Due to the non-lane-based and narrow natures of motorcycles, they can
make effective lateral movements without changing lanes. Therefore, it is necessary to
differentiate lateral moving behaviour of motorcycles from the lane-changing behaviour.
Cho and Wu (2004) suggested that the lateral position of a motorcycle was decided
by the positions of the nearest vehicles at front left, front right, left, right, rear left and rear
right. The relative longitudinal distance would affect the magnitude of the lateral
interaction reversely.
Minh et al. (2005a) conducted a study to investigate the overtaking behaviour of
motorcycles and the behaviour of riding alongside other vehicles in the same lane. In this
study, they suggested that the lateral distance needed for an overtaking behaviour was
linearly related to the vehicle overtaken. In addition, the lateral distance between two
motorcycles riding abreast was linearly related to the average speed of these two vehicles.
These relationships were described by linear regression models and data collected at
urban networks were used for the calibration process.

48
� Discussions
Classically a discrete variable is used to describe the lanes where a passenger car is
progressing on roads. However, the lateral position of a motorcycle is more likely to be a
continuous variable.
Minh et al. (2005a) modelled the lateral interactions by using linear regression
equations. Their model had two limitations. Firstly, it did not take the speed difference
into account. As a result, it was only suitable for describing the situations of low speed
difference. When the following motorcycle was overtaking the leading motorcycle by a
high speed difference, their linear regression model would misestimate the path width
required. Secondly, in reality, the relationship between the required path width and the
speeds was not linearly related. For example, in the motorway, the average speed could be
as high as 100 km/hr, but the lane width did not necessarily increase in proportion to the
speeds.
Another point needs to be discussed is the calibration of the models. It is difficult to
obtain a data set of motorcycle trajectories for microscopic studies because of their erratic
two-dimensional movements, particularly when the lateral movements within a lane
cannot be neglected. For example, no calibration has been performed on the model of Cho
and Wu (2004). The lack of empirical data could be the reason. However, Minh et al.
(2005a) have presented the calibration results based on the vehicular trajectories
extracted from video footage. Their experience showed that the video recording method
was capable of obtaining the trajectory data for motorcycle behaviour studies.
3.2.1.2 Longitudinal following models
The longitudinal following model describes the interaction between the subject
motorcycle and the vehicle in front. This behaviour pattern is similar to the conventional
car-following behaviour, but most of the longitudinal following models for motorcycles
will consider the effects of lateral moving behaviour patterns.

49
When Cho and Wu (2004) conducted a study to simulate the behaviour of
motorcycles in mixed traffic, they developed a ‘spacing model’ (Newell, 1961) to
describe the longitudinal movements. In their model, the speed of the subject motorcycle
at next time step was supposed to be a function of the speeds of both vehicles, the desired
speed of the subject motorcycle, the space headway, the maximum acceleration and
deceleration and a safety margin. In addition, Cho and Wu categorised the oblique
following behaviour as a type of longitudinal following. In order to deal with the
condition of oblique following, a weight function was introduced to describe the effects
of lateral position difference on the longitudinal headway. As the lateral position
difference between the two vehicles was larger, the following distance became smaller.
Lan and Chang (2004) developed an ANFIS (adaptive neuro-fuzzy inference
system) model to described the vehicle following behaviour of motorcycles. They linked
the acceleration rate of the subject motorcycle to the following distance, the speed of the
preceding vehicle and the speed difference. Based on the results, they concluded that the
ANFIS model performed better than the GM model.
Minh et al. (2006) specified two GM-like models that applied to both car-following
and free-decelerating conditions of motorcycles behind the stop line. The deceleration of
the subject motorcycle at next time step was supposed to be a function of the speed
difference, the speed of the subject motorcycle and the space headway. However, for
modelling the of movements of motorcycles, it might sometimes face the difficulties of
how to define whether a motorcycle was following another vehicle longitudinally or
obliquely due to the narrow and non lane-based natures of motorcycles. To deal with this
issue, Minh et al. (2006) developed a model to calculate the required width for the
progression of motorcycles. Thus, the leading vehicle of a motorcycle could be
determined and accordingly the longitudinal following distance could be calculated.

50
� Discussions
The longitudinal following behaviour of motorcycles is similar to the conventional
car-following behaviour. However, the modelling of the former behaviour is more
complicated because it has to consider the effects of the lateral position. For example, it is
observed that motorcycles will maintain a shorter headway when aligning to the lateral
edge of the preceding vehicle, as discussed in Chapter 2. In addition, due to the
non-lane-based nature of motorcycles, the leading vehicle of a motorcycle cannot be
defined merely by the lane. Therefore, there is a vague status between vehicle-following
regime and read-to-overtake regime.
Cho and Wu (2004) and Minh et al. (2006) have tried to deal with the interaction
between the longitudinal headway and the lateral position, but Lan and Chang (2004) did
not pay attention to this issue. In the study of Cho and Wu (2004), the oblique following
was categorised as the longitudinal following behaviour and a weight function was used
to describe the effects of lateral position on longitudinal headway. In the study of Minh et
al. (2006), the required width for a motorcycle on roads was modelled by a linear
regression equation and so the leading vehicle could be recognised. However, the
techniques to describe the effects of the lateral position on vehicle movements were just
at the preliminary stage. For example, the weight function in Cho and Wu (2004) was a
simple model which considers only the lateral position difference of the two vehicles. The
required width for the progression of a motorcycle in Minh et al. (2006) was modelled
simply by using a linear regression equation. How to integrate the effects of the lateral
movements into the longitudinal following behaviour is a challenge which the studies
focusing on mixed traffic flow modelling will face.
3.2.1.3 Cellular automata models
Apart from the mathematical equations mentioned above, some studies adopted
cellular automata modelling to direct the movements of motorcycles in a simulation.

51
Conventionally, the cellular automata model is applied to the simulation of homogeneous
traffic flow. Each cell unit usually represents the basic space that a vehicle needs. In order
to accommodate more than one type of vehicles into a cellular automata model,
non-identical particle sizes are assigned to represent different modes of transport.
Ahuja (2001) used a cellular automata-like approach to simulate the heterogeneous
traffic flow. The front, rear and lateral gaps accepted by each vehicle type were measured
and added to vehicle dimension to represent the road space occupied effectively by the
vehicle type. The size of a cell unit was decided according to the width of the road space
needed for the smallest vehicle type, which was 0.606 m for a bicycle. Each vehicle type
was assigned a certain number cell units to reflect the road space required. Then, rules for
moving, overtaking and halting were set to direct the movements of vehicles.
Lan and Chang (2005) and Lan and Hsu (2006) employed cellular automata models
to describe mixed traffic containing motorcycles. In order to deal with the situation of
more than one mode of transport into this cellular automata model, these studies used
non-identical particle sizes to represent different modes of transport, 6 × 2 cell units for a
passenger car and 2 × 1 for a motorcycle. Each cell unit accounted for 1.25 × 1.25 m2. In
addition, two cellular automata rules were set to direct the movements of the vehicles: the
forward moving rule described the acceleration and deceleration of the vehicles; the
lane-changing rule described their lateral movement behaviour. Finally, this model was
employed to assess the effects of lane widths and traffic compositions on flow. The
motorcycle equivalents were also estimated by using this model. Lan and Chang, 2005
� Discussions
Cellular automata modelling has become an important microscopic simulating
technique for complex behaviour (Blue and Adler, 2001). It has the strength to simulate
vehicles in traffic flow mainly due to its straightforward algorithms and its efficiency at
the use of computational resources (Nagel et al., 1997). However, this technique still has a

52
limitation when it is applied to the mixed traffic simulation.
For simulating homogeneous traffic, one can easily develop a set of intuitively
understandable behavioural rules for directing movements of vehicles and this simulation
tool is able to produce surprisingly realistic results (Nagel et al., 1996). However, when
applying the cellular automata to heterogeneous traffic, whether the rule set is capable of
describing the interactions between different vehicle types will become a critical question.
Here are some suggestions for this issue:
1) The lane-based nature of the cellular automata modelling: In the lane-based
traffic, the widths of vehicles are not a critical issue for traffic simulation and the
lateral clearance between vehicles is useless space. However, the lateral position
and the lateral gap are important factors for the manoeuvres of a motorcycle.
These factors influence most of motorcycles’ unique movements, but the
grid-based cell unit cannot represent these factors properly. Take the filtering
behaviour for an example. In the real world, the path for a motorcyclist to filter
through is dynamically formed by the lateral clearances between vehicles. A
cellular automata system cannot mimic the subtle difference in the widths of
vehicles. Thus, it is possible to result in misestimating the efficiency of
motorcycles’ filtering behaviour.
2) The interactions between vehicles: When modelling a heterogeneous traffic
flow, one should consider not only the sizes of different vehicle types, but also
the particular interactions between these vehicle types. However, the studies of
Lan and Chang (2005) and Lan and Hsu (2006) did not take the unique behaviour
patterns of motorcycles into account. Under these circumstances, it is a question
whether the cellular automata model is capable of producing ‘surprisingly
realistic results’ (Nagel et al., 1996) for mixed traffic containing motorcycles by
using such simple rules.

53
3.2.2 Macroscopic approaches
Motorcycles are observed filtering and moving to the head of queues during the red
light. In addition, they enjoy a burst at the beginning of green at a signalised intersection
(Hsu et al., 2003). Thus, the behaviour of motorcycles at signalised intersections is an
interesting issue for the modelling of motorcycle behaviour. Two studies using
macroscopic approaches to describe the behaviour of motorcycles at signalised
intersections are reviewed.
Powell’s (2000) tried to estimate the number of motorcycles which were able to
filter to the head of a queue. His work was inspired by the study of May and
Montgomery (1986), who reported that the PCU (Passenger Car Unit) value of
motorcycles measured in Bangkok was as low as 0 during the first 6 sec of the effective
green time and was around 0.53 to 0.65 afterwards. Based on such an observation,
Powell (2000) further developed a macroscopic model to estimate the motorcycles
which were able to approach zero-PCU zone. He assumed that the number of
motorcycles able to filter to the head of a queue was linked to the arriving timing of the
motorcycles, the structure of the kinematic waves (Lighthill and Whitham, 1957), the
geometrical layout of the road and the composition of the vehicle types. Finally, a linear
regression model was developed to describe this statistical relationship.
Rongviriyapanich and Suppattrakul (2005) used linear regression to estimate the
effects of motorcycles and the storage space behind the stop line on the start-up lost time
of passenger cars. They collected data from two intersections, one with storage space and
the other without. Their results showed that the appearance of motorcycles affected the
start-up lost time of passenger cars significantly at both intersections. In addition, they
found that the start-up lost time of passenger cars was linearly related to the number of
motorcycles in the queue. At the intersections with and without the storage space, each
motorcycle contributed an increase of 0.09 sec and 0.16 sec to the start-up lost time

54
respectively. These results provided useful information for the layout design of an
intersection.
� Discussions
The factors that affect the filtering behaviour are well considered in the study of
Powell (2000). However, as discussed in his study, he did not take the capacity of the
motorcycle storage at the front of the queue into consideration. Thus, this model could
overestimate the number of motorcycles in the storage because this model did not
constrain the capacity of the storage. Similarly, the stopping wave of motorcycles
should also be taken into account.
The above problem is the limitation of a macroscopic approach. The relationships
among the motorcycles in the zero-PCU zone, the area of zero-PCU zone and the area
of the motorcycle storage at the head of the queue are not linearly related. Their
relationships are highly dependent on the layout of the intersection. When the storage
zone is small, the zero-PCU area can extend or shift to the lateral clearances between
passenger cars. This means that a motorcycle needs not filter to the head of the queue,
but its PCU value still can be 0. This condition, however, is not consistent with the basic
assumption of this study.
Rongviriyapanich and Suppattrakul (2005) used a macroscopic approach to
describe the effects of an advanced stop line. However, they did not take the width of
lanes into account. A wider lane will facilitate the filtering and lateral following
behaviour of motorcycles. Since such behaviour patterns do not affect the headway of
passenger cars, passenger cars tend to enjoy a shorter start-up lost time on a wider lane. In
addition, the width of vehicles can affect motorcycles’ filtering and lateral following
behaviour as well. Therefore, the results of this study have the limitation of applying to
other intersections.

55
3.2.3 Summary
Based on the literature discussed above, each approach has its pros and cons. The
microscopic models are better able to deal with the mixed traffic flow due to their
flexibility. However, to obtain a useful data set for microscopic models is
resource-demanding. The model calibration and validation processes for microscopic
models are also challenging tasks. In addition, the cellular automata model cannot
represent the important characteristic behaviour pattern properly due to its difficulty with
describing the subtle differences in lateral clearances between vehicles.
In comparison, the macroscopic approaches are not flexible about altering the
modelling scenario and environmental settings, although they are easier in collecting the
data required and more efficient at the use of computational resources when simulating
the traffic.
3.3 Conclusions and discussions
From the literature reviewed above, the characteristics of the development of
motorcycle movement modelling can be concluded as follows:
1) Not a popular topic: In comparison to the diverse and well-developed
car-following models, the development of the models for motorcycle behaviour
is just at the preliminary stage. Only a few studies have been conducted in this
field.
2) Asia-related: Most of the studies on this topic are related to Asian countries,
directly or indirectly. This can be explained by the popular use of motorcycles in
these countries and the problems that motorcycles have caused in these areas.
3) From late 1990s: It has been found that little research into motorcycle behaviour
modelling had been conducted before the late 1990s. After the late 1990s, there
were several factors leading to the emergence of these studies, particularly in

56
Asian countries, for example, the usage of motorcycles, the availability of the
research tools, etc.
4) Technology depended: It is believed that the availability of the trajectory data is
of great importance in conducting a microscopic traffic study concerning
motorcycle movements in mixed traffic. Several studies have indicated that the
technique to obtain high quality data with low cost has become available since
the late 1990s (e.g. Bonneson and Fitts, 1995; Wei et al., 1999). This
improvement also has a positive effect on the research in this field.
A large number of studies focusing on the safety characteristics of motorcycling
have been conducted in Western countries, but studies on the standard transportation
issues of traffic flow effects have largely been neglected (Wigan, 2002). Some people
may argue that motorcycling should not be encouraged because of the safety issue and the
research on the mixed flow traffic containing motorcycles seems not so critical. However,
the presence of a large number of motorcycles has already been an existing problem in
Asian countries and this problem cannot be overlooked. In addition, as motorcycling has
the potential to be the solution for personal door-to-door transport in the congested urban
networks in the near future (actually, it has served well to gain mobility for those
motorcycle-driven societies), this topic deserves more attention.
Based on the above discusses, it is clear that there is currently a lack of knowledge
about the management of the presence of a large number of motorcycles, particularly on
modelling the interaction between the longitudinal and lateral movements of vehicles.
This study proposes to overcome this problem by focusing on capturing the unique
behaviour patterns of motorcycles. This will be described in the following chapters.

57
4 The Models
In Chapter 2, the fundamental elements which cause the unique behaviour pattern of
motorcycles have been extracted. As the complexity theory assumes that complexity can
emerge from simple rules, this study then further suggested that the motorcycle behaviour
can be described by modelling these basic elements. Three models are then proposed to
describe these basic elements, namely the longitudinal headway model, the oblique &
lateral headway model and the path choice model. A detailed account of the development
of these three models will be provided in this chapter.
4.1 The longitudinal headway model
The longitudinal headway refers to the following distance in the situation that the
subject vehicle is following directly behind a preceding vehicle. It is observed that the
longitudinal headways of motorcycles vary with the relative position to the leading
vehicle. Also, the swerving manoeuvre of motorcycles is assumed to affect their
following distance. Based on such an observation and assumption, the vehicle-following
model that integrates the scenarios with and without the consideration of swerving is
developed.
4.1.1 The minimum following distance without swerving manoeuvres
There are two strategies that a motorcyclist is likely to adopt in order to avoid a
collision: slowing down in time and dodging away in time. The former strategy means
that a motorcyclist applies brakes and reduces his speed to avoid a possible collision. This
principle of collision avoidance is usually employed to estimate the safety distance for
lane-based traffic. By using this strategy, the minimum following distance is a function of
the speeds, braking decelerations of the relevant vehicles and the reaction time of the

58
motorcyclist. This can be described by the equations of motion:
112
12
1 2 −−−− += nnnn dbv'v , where (4.1)
vn : the initial speed of vehicle n,
v'n : the final speed of vehicle n,
dn : the stopping distance of vehicle n and
bn : the braking deceleration of vehicle n under the circumstance of no swerving, bn < 0.
The stopping distance of the leading vehicle is describe as Equation (4.2) as the
final speed is 0 m/sec.
1
21
1 2 −
−− −=
n
nn b
vd .
(4.2)
The stopping distance of the following vehicle should take its reaction time into
consideration, given by:
n
nnn b
vvd
2
2
−= τ , where
(4.3)
� : the reaction time.
In order to avoid a collision, the following distance should be larger than the
difference between the stopping distances between these two vehicles. Thus, the
minimum following distance without swerving, �Dunswerving is formulated as:
�Dunswerving = dn - dn-1=1
21
2
22 −
−+−n
n
n
nn b
vb
vv τ ,
(4.4)
where �Dunswerving is the longitudinal following distance calculated from the front of the
motorcycle n to the rear of the preceding vehicle n-1.

59
4.1.2 The minimum following distance with swerving manoeuvres
In addition to the strategy of slowing down in time, another strategy a motorcyclist
tends to adopt to avoid a rear-end collision is to dodge away in time. Due to the narrow
and agile nature of motorcycles, they have the advantage of using the clearance aside the
preceding vehicle efficiently. This clearance then becomes a sheltering space for
motorcycles to escape from a possible collision. The easier they are able to access this
clearance, the shorter following distances they would like to maintain. As a result, it is
observed that a motorcycle is capable of following a preceding car by an extremely small
safety gap when this motorcycle is aligning to the lateral edge of the car. However, when
the motorcycle is aligning to the centre of the car, it needs a larger following gap
(illustrated in Figure 4.1).
Figure 4.1 The minimum following distance of motorcycles
In order to avoid collision by using a swerving manoeuvre, a motorcycle has to shift
a lateral distance of dw during a certain period of time tw. Assuming that the lateral speed
of the following motorcycle vw is a constant, tw can be described as
w
ww
vd
t = , where
(4.5)
dw : the lateral distance needed for avoiding a collision,
tw : the time needed for making the lateral movement dw and
Minimum following distance
A B
C

60
vw : the lateral speed of a motorcycle.
When a motorcyclist is carrying out a swerving manoeuvre, the minimum
longitudinal safety gap for this motorcycle is shorter than that under the condition of no
swerving. This is illustrated in Figure 4.2.
Figure 4.2 The space-time trajectories showing minimum following distance of a
motorcycle
Figure 4.2a shows the time-space trajectory of two vehicles. Curve A is the
trajectory of the rear bumper of the leading vehicle and curve B is the trajectory of the
front bumper of the following vehicle. Thus, the vertical distance between these two
curves represents the following distance between the two vehicles.
Under the unswerving condition, as shown in Figure 4.2b, when the following
vehicle senses the leading vehicle decelerating at time ta, it will apply brakes after a
delay of the reaction time �. In order to stop in time to avoid a collision, the following
vehicle has to maintain a safety gap �Dunswerving. This relationship has been described in
Equation (4.4).
However, when the following vehicle swerves off to the left of the leading vehicle
Time
Distance
�Dnunswerving
� tw
Da
Dc
Db
ta tb
The following distance without swerving
The motorcycle dodges away and has saved a space to avoid collision
(a) (b) (c)
tc
d1
d2
d3
d4
The trajectory of the rear bumper of the leading vehicle n-1
The trajectory of the front bumper of the following motorcycle n
A B

61
soon after the rider starts to brake at time tb, he is able to avoid the collision with an
additional margin of Da, as shown in Figure 4.2c. Therefore, the minimum following
distance is reduced to �Dunswerving -Da, which is equal to Db-Dc, given by:
swervingnD∆ = �Dunswerving -Da = Db-Dc
(4.6)
In Equation (4.6), Dc is the distance that the preceding vehicle has travelled from
time ta to time tc, given by
211 )(
21
)( wnn
wnnc tbtvD +++= −− ττ ,
(4.7)
whereas Db is the distance that the following motorcycle has travelled from time ta to time
tc:
2
21
wnn
wnnnb tbtvvD ++= τ .
(4.8)
Therefore, swervingnD∆ in Equation (4.6) is formulated as:
])(21
)([)21
( 211
2 wnn
wnn
wnn
wnnn
swervingn tbtvtbtvvD +++−++=∆ −− τττ
(4.9)
When a motorcycle is swerving away, its braking deceleration should be milder
than that without swerving. Therefore, a variable representing the braking deceleration
under the circumstance of swerving, b', is introduced to replace b, b'<0. Therefore, the
minimum following distance for a motorcycle to avoid collisions by swerving, swervingnD∆ ,
can be formulated by combining Equations (4.5) and (4.9):
})]([21
)]([{])(21
)([ 211
2'w
wn
nw
wn
nw
wn
nw
wn
nnswervingn v
db
vd
vvd
bvd
vvD +++−++=∆ −− τττ
(4.10)
)2
(21
))((21
)( 12
1'
w
wn
nw
wn
nnw
wn
nswervingn v
db
vd
bbvd
vD +−−++∆=∆ −− τττ ,
(4.11)

62
where �vn is the speed difference, �vn = vn -vn-1.
4.1.3 The minimum longitudinal following distance of a motorcycle
Equations (4.4) and (4.11) represent two constraints on the following distances of
motorcycles. Given that a motorcyclist is steering his bike based on the principle of
collision avoidance, the minimum longitudinal following distance he maintains, �Dmin,
can be formulated as min{ �Dunswerving , �Dswerving }, i.e.
minnD∆ =min{
1
21
2
22 −
−+−n
n
n
nn b
vb
vv τ , )
2(
21
))((21
)( 12
1'
w
wn
nw
wn
nnw
wn
n vd
bvd
bbvd
v +−−++∆ −− τττ }.
(4.12)
This model implies that a swerving manoeuvre is always available for a motorcycle.
In lane based traffic, the clearances between lanes provide motorcycles pathways to make
progress. The opportunities for swerving to these pathways are always available in a
one-on-one vehicular interaction. However, when the clearance or pathway is blocked by
other vehicles, for example, the right pathway of motorcycle B is blocked by motorcycle
A in Figure 4.1, this model is not sufficient for describing such a multi-vehicular
interaction. Under this condition, other models such as the oblique & lateral headway
model or the path choice model should be introduced to describe the behaviour of
motorcycle B. These models are developed in the following sections.
4.1.4 Summary
The longitudinal headway model is developed based on the equations of motion
which present the kinematic movements of vehicles. This model focuses on depicting the
phenomenon that a motorcycle will maintain a shorter headway when aligning to the edge
of the preceding vehicle. From the literature review, it is found that a critical limitation of
the existing models is unable to deal with the interaction between the following distance
and the lateral position of a motorcycle properly. This model tries to overcome this

63
limitation. The calibration and further specifications of this model are provided in Section
6.1.3.
4.2 The oblique & lateral headway model
The oblique headway is the safety distance a motorcyclist maintains when he is
following another vehicle obliquely, i.e. following at the rear left or rear right of a
preceding vehicle. Similarly, the lateral headway is the safety distance a motorcyclist
maintains when he is overtaking another vehicle, or following another vehicle laterally.
These two types of headway are differentiated according to the following angles. Thus,
they can be integrated into a single model as the following angle is taken into
consideration in this model.
4.2.1 The oblique headway
When a motorcyclist is following another vehicle obliquely, assessing the following
distance by employing the equations of motion would be complicated since the principle
of maintaining the following distance is not merely to avoid a rear-end collision. Some
lateral movements and unobservable psychological factors are also involved. Thus, this
oblique headway is described by a regression model. Several assumptions are made to
facilitate the modelling:
1) The factors that affect the oblique following distance are divided into two
components, the longitudinal gap and lateral gap.
2) It is assumed that there is an indifference curve of the oblique following distances
showing different combinations of the longitudinal gaps and lateral gaps. At each
point on the curve, a motorcyclist has no preference for one point over another
under a given traffic condition, i.e. the following distances on this curve
represent the same level of satisfaction for the motorcyclist.

64
3) The shape of this indifference curve is assumed to be either an elliptic curve or a
line, as illustrated in Figure 4.3.
Figure 4.3 The schematic diagram of the oblique following relationship
4) The longitudinal gap is assumed to be a function of the following angle, the speed
difference and the speed of the leading vehicle, whereas the lateral gap is
assumed to be a function of the following angle and the speed difference.
Accordingly, the oblique following distance is related to the longitudinal gap and
the lateral gap. The indifference curve can be described by either the equation of an
elliptic curve (Equation (4.13)) or the equation of the hypotenuse of a right triangle
(Equation (4.14)):
obliquenD∆ = θθ 2222 sinacosa lateralallongitudin +
(4.13)
obliquenD∆ =
θθ cossin lateralallongitudin
lateralallongitudin
aa
aa
+×
(4.14)
where obliquenD∆ is the oblique following distance, � is the following angle (see Figure
4.4). alongitudinal is the longitudinal factor and alateral is the lateral factor.
(a) (b)

65
Figure 4.4 The schematic diagram of the oblique following distance
The longitudinal factor, alongitudinal, acts as the semimajor axis of the ellipse in
Equation (4.13), or as the longer leg of the right triangle in Equation (4.14). It is linked to
the speed difference �vn and the speed of the leading vehicle vn-1:
alongitudinal =�long0 + �long1�vn + �long2 vn-1, (4.15)
where �long0, �long1 and �long2 are coefficients.
Similarly, �lateral is the lateral factor, acting as the semiminor axis of the ellipse or
the shorter leg of the triangle. The speed difference �vn is used to describe this variable:
�lateral = �lat0 + �lat1�vn, (4.16)
where �lat0 and �lat1 are coefficients.
Finally, the oblique following distance can be formulated by combining the above
three equations:
obliquenD∆ = θααθααα 22
1022
1210 )()( sinvcosvv nlatlatnlongnlonglong ∆+++∆+ − . (4.17)
obliquenD∆ =
θααθαααααααα
cos)(sin)(
)()(
101210
101210
nlatlatnlongnlonglong
nlatlatnlongnlonglong
vvv
vvv
∆+++∆+∆+×+∆+
−
−
(4.18)
4.2.2 The lateral headway
The lateral headway is the safety distance between a motorcycle and another vehicle
�

66
aside when the motorcyclist is overtaking or lateral following. This type of headway is a
special case of the oblique headway with the following angle equal to �90 . Thus, the
lateral headway is a function of the speed difference between these two vehicles.
lateralnD∆ = nlatlat v∆+ 10 αα
(4.19)
Figure 4.5 The schematic diagram of the overtaking relationship
4.2.3 Summary
The oblique & lateral headway model describes the headway distribution pattern of
motorcycles when they are following the preceding vehicles obliquely (or laterally). The
headway is modelled in a two-dimensional manner to depict the interaction between the
longitudinal movements and lateral movements of motorcycles. It can be applied to the
modelling of oblique following behaviour and overtaking behaviour of motorcycles.
4.3 The path choice model
In the previous sections, the longitudinal headway model and the oblique & lateral
headway model have been developed to imitate the basic one-on-one interactions
between a motorcycle and another vehicle based on the principle of collision avoidance.
Although these collision-avoidance based models are useful in describing how a
motorcycle maintains a proper safety distance, they have limitations on representing how
a motorcyclist tries to choose a path actively and creatively to make his way through the
� �

67
traffic jam when he is involved in a cluster of vehicles. Therefore, a model for describing
motorcyclists’ decision-making process of the path choice behaviour is required.
Based on the dynamic virtual lane-based nature (see Section 2.1.2) of motorcycles,
the path choice model aims to describe how a motorcyclist chooses the virtual lane. Such
a choice acts as the short-term plan for whether or not to make a lateral movement when a
motorcyclist is progressing in traffic. There are several factors involving in the
decision-making process. These factors are elaborated in the following and the
conceptual illustration of these factors is shown in Figure 4.6.
1) The speeds of the preceding vehicle and the objects beside the preceding
vehicle. These speeds reflect the driving conditions of the dynamic virtual lanes
that these vehicles (or objects) are currently in. When the motorcyclist is not
satisfied with the leading speed, he is likely to change his course for getting a
better driving condition. Otherwise the probability of staying on the current
course is usually high. It is then safe to say that the speeds of the objects in front
or at the oblique front will affect the choice of the following motorcyclist.
2) The lateral distance to the ready-to-overtake position. If the motorcyclist has
to leave the current course, he will choose a route which is closer to the current
position. The lateral distance he has to move to overtake will affect his choice.
3) The lateral clearances beside the preceding vehicle. The motorcyclist will
move toward a route with a larger clearance if he is not satisfied with the current
position.
4) The gap acceptance. The subject motorcycle will be constrained by the vehicles
aside or behind. Therefore, the gap acceptance of the subject motorcycle will
affect its lateral moving behaviour.
5) The size of the vehicle near the path. It is observed that motorcyclists do not
frequently drive alongside or behind a heavy vehicle for some reasons. For

68
example, the heavy vehicle is likely to obstruct the view field of the following
vehicle, may cause more dust and emissions and may lead to more serious
injuries in an accident.
6) A lateral movement usually does not finish in one time step. Therefore, once a
motorcycle starts to move laterally, the choice of time t+1 is affected by the
choice of time t.
Figure 4.6 The schematic diagram of the path choice decision
The path choice behaviour is proposed to be modelled by using a multinomial logit
model. The utility of a motorcyclist n to choose a path i can be express as:
inU = ininV ε+ , for all nCi ∈ , (4.20)
where Vin is the systematic component, �in is the random component and Cn is the choice
set. There are three alternatives in the choice set Cn. As shown in Figure 4.6, when the
subject motorcycle is not satisfied with the current position, it usually has three paths to
move on: a) shifting leftwards, b) keeping straight and c) shifting rightwards. Given that
The left path
The right path
The subject motorcycle
(3)
(3) (2)
(2)
(1)
(1)
(1) The lateral clearance beside the preceding vehicle.
(2) The lateral distance to the ready-to-overtake position.
(3) The interaction from the vehicle behind or aside.
The vehicle near the left path
The vehicle near the right path

69
the systematic components of these alternatives chosen by motorcycle n are Vl, Vc and Vr
respectively, then these alternatives can be formulated according to the attributes
discussed earlier. They are:
Vl = �l + �1 speedl + �2 forceFl + �3 sizel + �4 distl + �5 clearl + �6 forceRl + �7 lastl
Vc = �1 speedc+ �2 forceFc + �3 sizec
Vr = �r + �1 speedr+ �2 forceFr + �3 sizer + �4 distr + �5 clearr + �6 forceRr + �7 lastr (4.21)
where �l and �r are the alternative-specific constants. �1, �2, �3…, �7 are unknown
coefficients to be estimated. The attributes are defined as:
speed : the speed of the vehicle near the path,
forceF : the interaction with the vehicle ahead,
size : the size of the vehicle near the path,
dist : the lateral distance to the ready-to-overtake position,
clear : the lateral clearances beside the preceding vehicle,
forceR : the interaction with the vehicle aside and behind and
last : the choice of the last time step.
Then a multinomial logit model defines the probability for the motorcyclist n to
choose path i as:
)(iPn =�∈ n
jn
in
Cj
V
V
ee
µ
µ
(4.22)
where µ is the scale parameter. Since this parameter is not identifiable, conventionally
an arbitrary value, 1, is given (Ben-Akiva and Lerman, 1985a).
Equations (4.21) and (4.22) describe the path choice behaviour of a motorcyclist.
This model adopts the concept of dynamic virtual lane which is defined by the vehicles in
the subject motorcycle’s surroundings. This feature is the most important factor to
characterise the difference between this model and the lane-based models. The estimation

70
and refinement of this model will be presented in Section 6.3.
4.4 Conclusions
Three models were proposed in this chapter, namely the longitudinal headway
model, the oblique & lateral headway model and the path choice model. These models
aimed at describing the fundamental elements which caused the unique behaviour
patterns of motorcycles. In addition, these models tried to deal with the limitations found
in the literature, for example, to describe the interaction between the longitudinal
following distance and the lateral position, and to depict the dynamic virtual lane-based
movements. It was assumed that by capturing these features, the behaviour of motorcycle
could be described more accurately. The calibration and applications of these models are
presented in Chapters 6 and 7.

71
5 Data Collection
In Chapter 4, the models that focus on capturing motorcycle behaviour are
described. To obtain proper parameters for these models, calibration has to be carried out
based on field data. This chapter describes the approach to field data collection. In the
first section, 5.1, the data requirements for the calibration process are described. This will
clarify and facilitate the choice of data collection methods, which is discussed in the
second section. In the next two sections, 5.3 and 5.4, the process of data collection, data
extraction and data processing is provided. The accuracy of the database is also discussed.
A summary will be presented in the final part.
5.1 Types of data required
Before describing the data collection process, a description of the types of data
required is first presented. This facilitates the assessment of available data collection
methods so that a proper one can be chosen.
The data required can be grouped into three categories: observable data, latent data
and environmental data. The data in the first two categories support the calibration
process of the models described in Chapter 4, whereas the data in the last category are
needed at the stage of microscopic computer simulation developed in Chapter 7. These
three categories of data are described as follows:
� The observable data
In this study, the observable data refer to the trajectories of a motorcycle and the
vehicles in its surroundings, including their sizes. From these data, a variety of traffic
parameters for the model calibration process in this study can be generated. These
parameters include the basic kinematic parameters (e.g. speed, direction, acceleration and

72
deceleration) and the inter-vehicular interactions (e.g. following distance and speed
difference). The macroscopic parameters such as flow density can also be calculated. The
collection of these observable data and the generation of the basic kinematic parameters
are described later in this chapter.
� The latent data
The latent data required for this study are reaction time, desired speed, desired
deceleration, desired deceleration difference and desired lateral speed. These data types
are important parameters for the collision avoidance models (for example, Gipps, 1981).
The estimations or assumptions of these latent data are presented in Chapter 6.
� The environmental data
The environmental data refer to road geometry and traffic regulations, for instance,
road layout and speed limit. Motorcyclists in different environment could exhibit
different types of behaviour. For example, the behavioural difference between
motorcycling in urban networks and on the highway is significant. Therefore, it is
necessary to capture these characteristics in the microscopic traffic simulation model
developed in this study. The investigations and assumptions of the environmental data are
described in Chapter 7.
5.2 Data collection method
The measurement procedures for obtaining traffic data can be largely divided into
five categories. They are a) measurement at a point; b) measurement over a short section
less than about 10 m; c) measurement over a length of road, usually at least 500 m; d) the
use of instrumented vehicles; and e) wide-area samples obtained simultaneously from a
number of vehicles, as part of Intelligent Transportation Systems (Hall, 1999).
The traffic parameters of interest in this study are the highly accurate vehicular

73
trajectory data. Such data are able be obtained through two procedures: the video
recording method and the floating-car method. The former, based on categories c) and e)
in the definition of Hall (1999), uses video cameras fixed at elevated positions to record
the traffic flow whilst the floating-car method are based on categories d) and e),
employing vehicles equipped with sensors to measure motions and interactions of the
target vehicles.
In this section, firstly the advantages and disadvantages of these two methods are
discussed. Then the reasons for choosing the video recording method are given. Finally
the accuracy of the data collected by this method is described.
5.2.1 Video data versus floating-car data
A major advantage of video data is that it can obtain all the trajectories and sizes of
the vehicles in a traffic stream objectively. Another merit is that the video footage can be
reviewed and examined repeatedly, if necessary, to guarantee the quality of the data
extracted. In addition, it is an un-intrusive and naturalistic observation which ensures that
the normal behaviour can be observed and the data collected are not affected by the
presence of researchers. However, extracting data from video footage is an extremely
labour-intensive process, which is the main disadvantage of this method. According to
Taylor and Young (1988), the analysis process can take up to six times as long as the real
time recording. However, even this seems to be an underestimate. Ahmed (1999) reported
that an hour’s video footage requires 1,800 person-hours to process. It is understood that
how much work is needed depends on the types of data required and the traffic conditions.
Another disadvantage of this method is that there is only a limited survey area, around
200 m (Hidas and Wagner, 2004) to 400 m (Slinn et al., 1998), depending on the
resolution of the images and the field of view of the camera. The requirement of an
elevated position is also a limitation of this method.

74
The advantage of the floating-car method is that the data processing is simpler than
in the case of the video recording method. The video recording can obtain only a
sequence of still images to which a time-consuming procedure has to be employed to get
accurate parameters, whereas the floating-car method can directly collect the useful
parameters, depending on the sensors employed. Another advantage of the floating-car
method is that the floating car can be equipped with a wide range of sensors, including
camcorders (for example, used by Olsen and Wierwille, 2001). Despite these merits, the
floating-car method has some limitations. First, the data can only be collected from a
limited number of instrumented vehicles. Another disadvantage is that the drivers under
surveillance could behave differently than usual. In addition, the data collecting ability of
this method depends on the function of the equipment fitted on the instrumented vehicle
because each sensor can only acquire a certain type of information, i.e. position, speed or
distance. In order to obtain a complete picture of the surroundings, the vehicles need to be
well-designed and well-equipped. This will make the whole process expensive. Another
limitation of this method is that the surrounding environment will affect the behaviour of
the instrument vehicles and, thus, the context of the experimental environment has to be
set-up carefully (Hidas and Wagner, 2004).
When evaluating data collection methods, the accuracy of the data acquired is an
important issue to be considered. However, it is difficult, in general, to compare the
accuracy of the data obtained from these categories because the accuracy of the data
collected by the floating-car method depends on the equipment used. Therefore, the
comparison is not made in this section. Instead, this issue is discussed in Section 5.2.3
after the data collection method for this study has been chosen.
5.2.2 Choosing the data collection method
The calibration process in this study relies heavily on precise multiple vehicle

75
trajectory data. In addition, some types of macroscopic data, such as flow density are also
required. With the floating-car method, the data types collected depend on the ability of
the sensors on the instrumented vehicle. An extra data type will need an additional sensor
or device. This means that it is difficult and expensive to obtain some required parameters
of this study, for example, detecting the trajectories of all the vehicles in surroundings. In
contrast, the main strength of the video recording method is to record everything that
happens in the traffic flow. In addition, video camcorders are comparatively simple and
affordable, compared to the cost for the floating-car method. Therefore, the video
recording method is employed by this study.
5.2.3 Accuracy of the data acquired by the video recording method
The accuracy of the video recording method depends on the pixel resolution of the
video images, so the trade-off between pixel resolution and field of view has to be
considered. For example, a telephoto image provides a high resolution but has a limited
survey area whereas a wide angle image accommodates more information but has a
limited resolution. Therefore, a camcorder with a higher definition or a larger focal length
factor will be more flexible to provide data with higher accuracy. The literature shows
that different extents of accuracy, from 0.3 m to 1.3 m, have been reported (for example,
Hasan et al., 1997; Ahmed, 1999; Khan and Raksuntorn, 2001; Hoogendoorn et al., 2003;
Hidas, 2005). If the data accuracy can reach such a standard, it should be sufficient for
calibrating the models proposed in Chapter 4.
5.3 Data collection
As explained in the preceding section, the data for this study were collected by
video camcorders. A highly detailed video-captured database containing information on
the vehicular trajectories was built. The sequence for data collection and data processing

76
is shown in Figure 5.1.
Figure 5.1 Data collection and processing sequence
In this section, firstly the camcorder chosen for this study is described, which is
followed by the descriptions of the time and site for the survey. Then the characteristics of
the data extraction programme are reported. Finally the database obtained is presented.
5.3.1 Video recording equipment
The data were collected by using two Sony DCR-HC32 NTSC MiniDV digital
camcorders. Sony DCR-HC32 was chosen because this model is capable of providing
video images with resolution up to 720 by 480 at a frame rate of approximately 29.97 fps
(frames pre second). It can record the video signal on MiniDV tape in digital form, which
has the advantage over analogue of suffering little or no generation loss in recording and
editing. It also facilitates the conversion, compression and backup of the video files
during the data extracting process. In addition, Sony DCR-HC32 has a very large focal
length factor, which equals the focal length ranged from 44 to 880 mm (Sony Corporation,
2005) of a 35 mm full-frame camera. Moreover, it is a consumer electronics product
which can be obtained at an affordable price. Due to these characteristics, this model has
Record traffic flow from a selected traffic link
Convert video footage to a proper digital format
Extract vehicular trajectories and vehicle sizes
Generate data required

77
sufficient flexibility to provide video footage with high accuracy.
One critical issue of using camcorders for moving object tracking is that the lens
distortion of the machine should be calibrated carefully (Tsai, 1987; Hoogendoorn et al.,
2003). A camcorder with lens distortion means that, under certain conditions, images
from a camcorder cannot precisely depict the shape of the objects in the real world. For
example, with the camcorder, a straight line is represented as a curved line. The extent of
distortion is more noticeable at the edges of the images than at the centre. In photography,
the lens distortion is linked to the focal length of the lens system. Usually, using
wide-angle lenses tend to exhibit barrel distortions whereas the telephoto lenses lead to
pincushion distortions. The distortions of the images from Sony DCR-HC32 are shown in
Figure 5.2.
Figure 5.2 The lens distortion test of Sony DCR-HC32
From these images, it is found that this machine controls pincushion distortions well
at telephoto zooms. However, slight barrel distortions can be found at wide-angle zooms.
Hence, when collecting data by using a wide-angle zoom, the correction for lens
distortions is needed.
5.3.2 Time and site of the data survey
� Time
The video footage was captured from 17:00 to 18:00 (British Summer Time) on
Telephoto zoom Wide-angle zoom

78
10th May 2005. It was a sunny afternoon in late spring, which provided good visibility for
obtaining high quality video images. It should be noted that the pavement was dry when
the data were collected.
� Site
A section of the Victoria Embankment in London was selected for this study (Figure
5.3b). This site was chosen for two reasonsii: a) there was an overhead pedestrian bridge
at the site which provided a proper high vantage point to take video footage of the traffic
stream, and b) the geometric design of the link made it easy to observe the interaction
between and amongst vehicles. The schematic diagram of the survey site is shown in
Figure 5.3a. The details of this site are described below:
1) Geometric characteristics: The survey area, which was 80.00 m long and 8.54
m wide, was the south bound traffic stream of this link (see also Figure 5.4a). It
consisted of two lanes at the far end and three lanes at the near end. At the far end,
on-street parking was permitted. Two sightseeing bus stopsiii were located at the
middle part of the site. The south of the near end was the stop line of a signalised
pedestrian crossing.
2) Traffic characteristics in the survey area: As vehicles moved southwards from
the far end, it was a two-lane traffic flow which used the road space of 8.54 m
wide. However, when the on-street parking spaces or the bus stops were
occupied, the width of the two-lane traffic was narrowed down from 8.54 m to
around 6 m. Under these circumstances, the vehicles had to change their
directions and speeds to adapt to the narrow path. Between the bus stops and the
signalised pedestrian crossing, the road space was divided into three lanes.
ii These traffic features described in this section remain to the present. iii The periods that the sightseeing buses park at these stops could last for more than 5 minutes.

79
Figure 5.3 The schematic diagram of the survey siteiv
iv The photo in Figure 5.3b was retrieved from Google Maps.
Waterloo Bridge
(b)
(a)
Crossing
Camcorder
Pedestrian Bridge
Railway Bridge
Signalised Pedestrian
80 m
85 m
Survey Area
N
Pedestrian Bridge
River Thames Charing Cross
Station
Embankment Station
Survey Site
Bus Stops
On-street parking space

80
3) The opposing traffic stream: The opposing stream was the north bound traffic
with two lanes. Between the north bound stream and the south bound stream was
a central reservation, which completely separated the flows between the two
directions. Thus, the north bound traffic stream did not affect the traffic of the
survey site.
4) The traffic downstream: After passing the pedestrian crossing, the south bound
traffic had three lanes. Although next intersection was 85 m away, from which
the queue for right-turn on the outer lane could extend to the survey area. Once
the queue reached the middle part of the survey area and the bus stop was loaded,
there was only one lane available at this section. Thus, the south bound traffic
was forced to merge from two lanes into one when passing the bus stops.
The geometric and traffic characteristics of this survey area provided an
environment to observe the interactions amongst vehicles, including filtering, queuing,
discharging, merging, lane-changing, and stop and go behaviour. In addition, in such
environment, vehicles (including motorcycles and other types of vehicles) had to interact
not only with the vehicle ahead, but also with the vehicles at lateral and oblique directions.
All this made this survey site suitable for observing the motorcycle behaviour patterns
discussed in Section 2.3.
� Equipment
Two Sony DCR-HC32 digital camcorders were set up on the pedestrian bridge to
collect data. One camcorder was used to record the traffic stream (Figure 5.4a). In order
to obtain a better pixel resolution, the corner of the outer lane on the near side was
cropped out of the field of view. This improved the pixel resolution by around 16%. These
images were captured using a focal length at the middle range of the machine, at which
no correction of lens distortions was needed. The other camcorder recorded the vehicles

81
from a bird’s-eye view for measuring the widths and lengths of vehicles, as shown in
Figure 5.4b.
Figure 5.4 Images for extracting trajectories and measuring vehicle dimensions
5.3.3 The data extracting system
The vehicular trajectories in video images can be extracted either manually or by
using an automatic image processing technique. Although the use of image processing
software can save a lot of time and cost, the technique for detecting vehicles which are
mutually overlapping in the video images is still under development (for example,
Veeraraghavan et al., 2005; Lin et al., 2006). In order to control the quality of the data, the
vehicle trajectories were extracted manually in this study. To this end, a computer tool,
programmed by using Microsoft Visual Basic 6.0, was developed.
The data extracting process in this study was similar to that of VEVID (Wei et al.,
2005). First, this computer programme displayed video images on screen by a specified
frame processing interval. At the same time, the researcher tracked the path of a selected
target vehicle, frame by frame, by marking its positions on the screen with mouse clicks.
80.00m
8.54m
Survey area
(a) (b)

82
Thus, a sequence of video image coordinates was obtained, which was then converted
into real-world coordinates and recorded into the database.
Developing a new data extracting system had many advantages. The most important
one was its flexibility in expanding new functions. For example, the other software
packages available at the time of the data collection did not provide some customised
functions, such as the verification tools or the zoom-in function, developed in this
programme. These features ensure the quality and accuracy of the data. The settings and
functions of this system are described below.
5.3.3.1 User interface
Figure 5.5 shows a screenshot of this system. The user can track the trajectories of
vehicles and operate this system via a Windows-based graphical user interface.
Figure 5.5 Screenshot of the new data collection system
5.3.3.2 The computer monitor and pixel resolution
In this study, an hp-1702 17-inch LCD monitor with a resolution of 1024 by 768

83
pixels was employed for this data extracting work. The dimensions of the screen area are
336 mm wide by 270 mm height.
The original resolution of the video footage surveyed was 720 by 480 pixels. Each
pixel represented 56 mm (longitudinal) by 16 mm (lateral) on the near side and 554 mm
(longitudinal) by 53 mm (lateral) on the far side of the survey area. The video images
were resized to 990 by 660 pixels to facilitate data extracting when displaying on the
monitor. The scales of the objects shown on the screen were 1:172 (longitudinal) and 1:46
(lateral) on the near side; 1:1,689 (longitudinal) and 1:150 (lateral) on the far side of the
survey area. The details of the image quality are listed in Table 5.1.
Table 5.1 The resolution of the video images
Distance from Pixel resolution (mm/pixel) Scale of objects shown on hp-1702 the near side (m) Longitudinal Lateral Longitudinal Lateral
0 56 16 1:172 1:46 20 133 25 1:404 1:72 40 241 35 1:734 1:98 60 382 44 1:1,165 1:124 80 554 53 1:1,689 1:150
5.3.3.3 Video format
The data extracting system uses digital video footage with AVI format as the input
file. AVI (Audio Video Interleave) is a multimedia format introduced by Microsoft in
1992 as part of the Video for Windows technology. The main reason for using this format
is its compatibility with the MCI (Media Control Interface) programming library
provided by Microsoft.
The video footage has to be converted to AVI format before it is registered to the
data extracting system. The system will display the video images frame by frame,
according to the given video frame processing interval. The user can then track the
vehicular trajectories by mouse clicks.

84
5.3.3.4 The zoom-in function
This programme can resize the images and display a selected area on the screen to
facilitate data extraction. Although resizing the images improve neither the resolution nor
the quality of the images, a larger picture on the screen can reduce the human error during
the data extracting process.
5.3.3.5 The trajectory tracking function
This programme can display the video images by an adjustable video frame
processing interval, which was set to be 1 sec in this study. The researcher is able to tracks
the path of a target vehicle by clicking the mouse on a distinguishable point of the vehicle
on the frames displayed. Then, this programme converts the coordinates from the selected
distinguishable point to the front central point and records the trajectory. In this system,
six distinguishable points for tracking the movements of vehicles are provided: front left,
front central, front right, rear left, rear central and rear right points. In addition, the
position of the motorcyclist’s head is also used to track the trajectory when the
motorcycle is hidden behind other vehicles. These points are shown in Figure 5.6.
Researchers can choose any of the six points to track the trajectory.
Figure 5.6 The schematic diagram of the measured dimensions of vehicles
length
width
width
length Rear right point
Rear left point
Rear central point
Front right point
Front left point
Front central point Rear right
point
Rear left point
Rear central point
Front left point Front central point
Front right point
The head of the rider

85
5.3.3.6 Projective model
When the trajectories of vehicles have been tracked, the data are recorded by using
the video image coordinates, which need to be converted to the real-world coordinates
(Figure 5.7) for further analyses. Hence, a projective model was built in this data
extracting system to accomplish this task.
Precisely inferring the three-dimensional information from the video image
coordinates is computationally intensive (Tsai, 1987). The literature shows that several
simplified approaches have been used for converting coordinates between two planes.
These approaches are discussed below:
Converting coordinates between two planes can be straightforwardly achieved by
linear scaling, if these two plains are parallel and the effects of perspective are omitted.
Usually, this approach is used when the video images are recorded from a bird’s-eye view,
as in the study of Hoogendoorn et al. (2003). However, it is usually difficult to record the
traffic flow from a vertical view angle because a very highly elevated position is needed
for this view angle.
Figure 5.7 The conversion of the coordinates between the video image and the real world
videox
videoy (0,0)
(pixel)
(0,660)
(990,0)
(pixel)
(5.42,0.00)
realx
realy
(m)
(m)
Projective model
(a) Video image coordinate system (b) Real-world coordinate system
(990,660)
(936,621) (80.00,8.54)
(343,141)
(626,488)
(641,18)
(59.05,8.54) (62.75,0.00)
Indication of the four reference points for calibration
(80.00,0.00)
(0.00,8.54)

86
When considering the effects of perspective, the conversion is more difficult. Wei et
al. (2005) dealt with this issue by using ‘conversion ratios’. They marked a sequence of
reference points in the study area and measured the conversion ratios between these
points. The coordinates between two planes could then be converted via these conversion
ratios. The main weakness of this method is the discontinuity of the conversion ratios.
Between two conversion ratios, there is a gap between the real world coordinates. This
will inevitably cause errors when calculating distances covering more than one reference
points. Therefore, the accuracy of the conversion depends on the number of the reference
points. This weakness can, however, be overcome by using a regression model to convert
the coordinates as in Teknomo et al.(2000). The accuracy of this approach relies on the
model setting. Some statistics measures such as 2r can be used to examine the
conversion outcomes.
In photogrammetry, the mapping of the coordinates between two planes can be
written as Equation (5.1) (Mikhail et al., 2001):
1
1
54
876
54
321
++++=
++++=
videovideo
videovideoreal
videovideo
videovideoreal
yxyx
y
yxyx
x
ααααα
ααααα
,
(5.1)
where ),( realreal yx is the real-world coordinate, ),( videovideo yx is the video image coordinate
and 1α to 8α are coefficients. This formula can convert the video image coordinates to
the real world coordinates (or vice versa) after the eight coefficients have been computed.
The commercial software ViVAtraffic (The ViVAtraffic-Team, 2007), Khan and
Raksuntorn (2001) and Minh et al. (2006) have employed this approach for converting
coordinates. To obtain the coefficients of this model, the coordinates of four reference
points in the real world and their counterparts in the video images should be measured.
Three of these four points must not lie in a straight line. However, this mathematical

87
model also has some limitations when adopted by this study. Firstly, the traffic stream in
the real world should be on a plane, i.e. not on a concave or convex slope. Secondly, the
lens distortions need to be converted in advance.
In this study, since the traffic stream in the real world was on a plane and the lens
distortion of the video footage was mild, Equation (5.1) was adopted to convert
coordinates. The coordinate systems of the two planes are defined as in Figure 5.7. Four
points were measured both from the survey area and from the video image, as listed in
Table 5.2.
Table 5.2 The list of reference points
Coordinate Real-world (m) Video image (pixel)
Point 1 (62.57, 0.00) (641, 18) Point 2 (80.00, 8.54) (937, 621) Point 3 (59.05, 8.54) (626, 488) Point 4 (5.42, 0.00) (343, 141)
The parameters of the model for converting coordinates from the video image to the
real world were obtained as Equation (5.2) whereas the model for converting coordinates
from the real world to the video image was as Equation (5.3).
1002259.0021173.0023744.58205340.0084754.0
1002259.0021173.0043850.781193725.0450656.2
++−+−−=
++−++−=
videovideo
videovideoreal
videovideo
videovideoreal
yxyx
y
yxyx
x
(5.2)
1002759.0008735.0254507.146108294.27201130.2
1002759.0008735.0269569.330022358.3647388.0
++−++−=
++−++−=
realreal
realrealvideo
realreal
realrealvideo
yxyx
y
yxyx
x
(5.3)

88
5.3.3.7 The length measuring function
This programme provides a function for measuring lengths and distances. By
clicking two points on the images, this programme can calculate the distance between
these two points in the real-world coordinates. This function can be used to measure the
length and width of the vehicles.
5.3.3.8 Recording vehicle types
Different vehicle types usually exhibit different behaviour although some of them
have similar sizes. For example, motorcycles and bicycles present different speeds and
accelerations, but road spaces they occupied are similar. It is thus necessary to mark them
when extracting the data.
In this study, the vehicles in the video images were categorised into five groups:
motorcycles, passenger cars, vans, buses and bicycles. The types of vehicles were
recognised and recorded while extracting the trajectories.
5.3.3.9 The verification tools
Two mechanisms for verifying the data have been developed. One is overlaying the
data to the video images, i.e. projecting the information extracted onto the original video
frames by using Equation (5.3). A screenshot of this function is shown in Figure 5.5. This
means that the sizes and locations of the vehicles in the database can be visually reviewed.
The other verification tool is the animated display of the trajectories from a top-view
angle (Figure 5.8). The animation is presented by using an orthographic coordinate
system from the top-view. Hence, the movements of vehicles can then be examined
without the effects of perspective. These two functions can be used to probe the manual
mistakes when extracting data.

89
Figure 5.8 The animated display of the extracted trajectories
5.4 The database
The whole process for extracting data from the video footage was extremely
time-consuming. In this study, it required approximately 200 person-hours to produce one
hour of video data, including the time for data collection, video file conversion, trajectory
extracting and data cleaning. If the density of the flow in the video was higher, more time
was needed. After extracting the trajectories from the video footage and some work of
data processing, a database was finally built.
In this section, the approach of calculating the basic data types in the database is
discussed. Then a brief description of the database is presented and the accuracy of the
data is described.
5.4.1 Preliminary data processing
The data processing in this study was done in two stages. The first stage was the
preliminary data processing, which was carried out soon after the trajectories had been
extracted. In this stage, the basic kinematic parameters of each vehicle were calculated to
constitute the database. The second stage was the advanced data processing, which was
the procedure of retrieving information from the established database. It was conducted
before analysing the interactions between and amongst vehicles such as following
distances and speed differences. The details of extracting the basic kinematic

90
characteristics are given in the subsections below whereas the advanced processing will
be described in Chapter 6.
� Directions of vehicles
Two types of vehicle directions were calculated by this system: the steering
direction and the body direction. The steering direction is the one by which a vehicle is
moving. This type of direction is usually identical with the orientation of the front
wheel(s). In this study, the steering direction was used to calculate the lateral speeds of the
vehicles, to estimate the longitudinal speed differences between vehicles and to calibrate
the path choice model.
The body direction indicates the body orientation of a vehicle, which represents the
road space that this vehicle is currently occupying. In this study, the body direction was
used for estimating the four corners of a vehicle. Thus, the calculation of the body
direction would affect the estimation of the following distances and the calibration results
of the headway models in this study. When a vehicle is changing its direction, the
difference between the steering direction and the body direction is sometimes significant
and not distinguishing them would affect the results of the model calibrations.
The steering direction was calculated by the difference of the locations between two
time steps, as shown in Figure 5.9. It was formulated as follows:
)(tan1,,
1,,1,
−
−−
−−
=tntn
tntnsteertn xx
yyθ , where
(5.4)
steertn,θ : the steering direction of vehicle n at time step t;
xn,t : the longitudinal position of the front central point of vehicle n at time step t;
yn,t : the lateral position of the front central point of vehicle n at time step t.

91
Figure 5.9 The conceptual illustration of the steering direction
To calculate the body direction of a vehicle by using merely the data of its trajectory
can be more complex. It is linked to the wheelbase and the length between the front
bumper and the front wheels. These variables are not measured in this study because they
are difficult to be observed from an elevated position. Therefore, a simple equation was
proposed to estimate the direction of the vehicle body, i.e. by calculating the positions of
the front bumper at current time step and the rear bumper at last time step, as shown in
Figure 5.10. The formula was as follows:
)(tan1,,,
1,,,1,
−
−−
−−
=tnrctn
tnrctnbodytn xx
yyθ , where
(5.5)
bodytn,θ : the direction of the body of vehicle n at time step t;
xrc,n,t-1 : the longitudinal position of the rear central point of vehicle n at time step t-1;
yrc,n,t-1 : the lateral position of the rear central point of vehicle n at time step t-1.
Figure 5.10 The conceptual illustration of the body direction
steertn,θ
(xn,t-1,yn,t-1)
(xn,t,yn,t)
bodytn,θ
(xn,t,yn,t)
(xrc,n,t-1,yrc,n,t-1)

92
� Edges of vehicles
In this study, both two-wheeled and four-wheeled vehicles are assumed to be
rectangular, although their shape could be irregular from the top-view. Thus, the area
occupied by each vehicle could be represented by the four corners of a rectangle and the
direction of the vehicle body. The dimensions are measured from the widest and the
longest parts of the vehicle. The width of a motorcycle is defined as the width of its
handlebar, as shown in Figure 5.6.
� Kinematic characteristics
The data of basic kinematic parameters, such as speed, acceleration and
deceleration of each vehicle at every time step, were also calculated and recorded into the
database. The formulae are as follows:
t
yyxxv tntntntn
tn ∆−+−
= −−2
1,,2
1,,,
)()(,
(5.6)
where tnv , is the speed of vehicle n at time step t and tna , is its acceleration (or
deceleration) which is calculated with
tvv
a tntntn ∆
−= −1,,
, .
(5.7)
5.4.2 Description of the database
By using the data extracting system, a database, with 42,711 observations
containing information on the trajectories of 2,109 vehicles, including 477 motorcycles
and 1,293 passenger cars, was built (Table 5.3). Each vehicle which appeared in the video
footage was issued a serial number. The time series data of each vehicle were recorded,
including its width and length, its video image and real-world coordinates, its steering and
body directions, speeds, accelerations and decelerations. By using this database, all the

93
observable data described in Section 5.1 could be generated.
Table 5.3 reveals the numbers of the vehicles observed in the video footage.
Motorcycle took up 22.6% of the flow in this link at the time data were surveyed. This
figure is surprisingly high compared with figures from the DfT (2005a), in which
motorcycles represent only around 1% of all traffic in Great Britain in 2003. This figure
also means that this link provides a good environment for motorcycle behaviour studies.
Table 5.3 Numbers of vehicles surveyed Vehicle type Frequency Percent
Motorcycle 477 22.6 Passenger car 1,293 61.3 Van 71 3.4 Heavy vehicle 47 2.2 Bicycle 221 10.5
Total 2,109 100.0
5.4.3 Accuracy of the database
Although the data collection approach in this study provides highly detailed
information about the traffic flow, accuracy of the data is still an issue of utmost concern.
In Section 5.2.3 the accuracy of the data acquired by using the video recording method is
discussed. The literature shows that the extent of accuracy is around 0.3 m to 1.3 m.
Theoretically, when the error caused by manual operation is controlled properly, the
margin of error ranges in the size of a pixel. Thus, the measure of the positions involves
an uncertainty of double the pixel resolution because the value could be overestimated or
underestimated. In this study, under ideal conditions, the measurements involve
uncertainties of 0.06 m (longitudinal) by 0.02 m (lateral) on the near side and 0.55 m
(longitudinal) by 0.05 m (lateral) on the far side (see Table 5.1). These values show that
this approach has the potential to acquire extremely high accuracy data. However, in
practice the data contained more errors because many factors had caused uncertainty in

94
the data collection process. These factors are discussed as follows:
� Error caused by manual operation
It was difficult to ensure that the trajectories of vehicles were all tracked by the
pixel-level accuracy, especially when it was operated manually. The size of a pixel from
the video image showing on the computer screen (hp-1702 LCD monitor) was originally
around 0.33 mm. Even though it was enlarged by using the zoom-in function (see Section
5.3.3.4) of this data extraction system, the size was as small as around 0.49 mm/pixel.
With this size, it still could not rule out the probability of manual errors during the data
extraction process.
� The systematic error due to the pixel resolution
The data collected from the nearside have higher pixel resolution. This means that
the error of the data increases along with the longitudinal distance systematically. This
might cause problems when using the data.
This perspective problem can be solved if images from the bird’s-eye view are
available. Another possible solution is to consider this error in the models which use this
data set. Thus, an error term to represent this inaccuracy could be added to the models
and the variance of this error term is linearly related to the longitudinal distance.
� The systematic error caused by the view angle
There are errors caused by the view angles between the observer and the vehicles.
The magnitude of this type of error depends on the sight angle and the height of the
object observed. As shown in Figure 5.11, when extracting data from the video footage,
the data for vehicles on the far side or with higher chassis would contain larger errors.

95
Figure 5.11 The errors caused by perspective and sight angles
To reduce these errors, the camcorders should be located at as high a position as
possible. However, such a position sometimes is unavailable. In this study, an alternative
method was used to reduce this error: using the shadow of the object to recognise its
position. During the data survey period, rays of the sun were nearly parallel to the
bumpers of vehicles. The shadows of the vehicles offered more information for
indicating the longitudinal location of the front bumpers of vehicles (see Figure 5.5).
Therefore, the errors caused by perspective could be reduced. Despite this, it is
important to be noted that the rays of the sun change angle with time and so does the
relative position of a vehicle and its shadow. However, this factor can be omitted as the
relative locations of vehicles and the kinematic parameters will not be influenced.
� Errors from the occlusion in images
Besides the problems with sight angles, another critical issue is to recognise
vehicles which are mutually overlapping in images. When the colours of the
overlapping vehicles are similar, it was difficult to recognise their edges precisely. This
would inevitably affect the accuracy of the data.
A possible solution for this problem is to take the video from the bird’s-eye view. In
this study, the extracting system provides a function to use the locations of
motorcyclists’ heads to help the recognition. In addition, the shadows are used to
recognise the occlusion in images.
Possible error Possible error Possible error
Observing point

96
� Errors from the estimation of the vehicle edges
It has been discussed in Section 5.4.1 that the vehicles were assumed to be
rectangular in this study. Based on this assumption, Equation (5.5) was employed to
estimate the directions of the vehicle bodies by which the edges of vehicles could be
represented effortlessly. However, two factors could cause inaccuracy in this approach.
The first one was the calculation of the vehicle direction could contain errors. This
happened because Equation (5.5) was just a simplified formula which did not capture all
the factors affecting the movements of the vehicle body. The other factor was the error
arising from assuming that the edges of vehicles were rectangular. As shown in Figure 5.6,
the rectangular area was always larger than the actual area a vehicle occupied.
Nevertheless, given the computational time and resources of this study, this approach
seemed to be the best solution to describe the edges of vehicles, albeit with some
weaknesses.
� Discussions
Considering the aforementioned errors, the accuracy of the data in this study is not
as high as that shown in Table 5.1. It is also difficult to measure how these factors affected
the accuracy of the data. However, it would be reasonable to state that this database has
higher data accuracy on the near side and on the lateral direction in comparison with the
data of other studies (with accuracy of around 0.3 m to 1.3 m, see Section 5.2.3). The
reasons that this database has higher accuracy are: a) the pixel resolution of the original
video images is higher, b) the data are extracted manually and c) the data extraction
programme provides some customised functions to ensure the data quality.
The aim of building this database is to calibrate the headway models and the path
choice model developed in Chapter 4. However, the accuracy of the data on the far side
might not be high enough for conducting some analyses. Therefore, when using the
database, the difference of accuracy on the longitudinal distance should be taken into

97
consideration.
It is worthwhile to discuss the effects of the shadows caused by the sun in video.
From the experience of this study, it is found that taping the video footage in a sunny
day will provide more clues to identify the trajectories of vehicles. Interestingly, the
manual of the video processing software ViVatraffic (The ViVAtraffic-Team, 2007)
makes a different suggestion. It suggests that the recordings should be done under a
cloudy sky to avoid shadows. The reason is that when this software recognises vehicles
automatically by comparing the actual image with its background image, the shadows
will be interpreted as a part of a vehicle. This means that if there are fewer shadows, fewer
misinterpretations will be caused. Therefore, when taping the video for trajectory
extracting, the relationship between the daylight conditions and data extracting
techniques should be taken into account.
5.5 Summary
This chapter presented the development of a highly detailed video-captured
database containing information on the trajectories of 2,109 vehicles from a section of the
Victoria Embankment in London. The video was recorded near a traffic signal, so the
interactions between vehicles could be observed. A computer programme was developed
to extract trajectories and sizes of the vehicles from the video images. The database built
by this programme also included the types, widths and lengths of the vehicles. From this
database, a wide range of relevant traffic parameters could be generated for further
analyses and model calibrations.

98
6 Model Calibration
The models proposed in Chapter 4 to describe the behaviour of motorcycles are
calibrated here. Calibration is a process of adjusting and determining a set of parameters
in a model by using observed data. Its purpose is to facilitate the accuracy of the model
outputs. In this chapter, the calibration process is carried out based on the database of
Chapter 5. The calibration results are detailed in the following sections.
6.1 The longitudinal headway model
The calibration results of the longitudinal headway model will be presented in this
section. This section begins with a description of how the data set for this calibration was
retrieved from the database. Section 6.1.2 examines the basic assumption of this model,
i.e. a motorcycle would have a shorter headway when following the preceding vehicle by
aligning to its lateral edge. The longitudinal headway distribution of motorcycles is also
identified here. Section 6.1.3 provides further specifications and assumptions about the
model based on the findings of the field data and the calibration method. The final section
then presents the calibration results.
6.1.1 Data selection
In order to understand the longitudinal following relationship of motorcycles, a data
set containing vehicle pairs in longitudinal following relationship was retrieved from the
database. The preceding vehicle of each vehicle pair in this data set is a passenger car and
the follower is a motorcycle. Its concept is illustrated in Figure 6.1.

99
Figure 6.1 The schematic diagram of the longitudinal following relationship
This data set contains the kinematic information of every vehicle pair, including the
longitudinal headway, the difference in lateral position and the speeds of the vehicle pair.
It was selected according to the following sequences:
1) Select every motorcycle in the database as the subject vehicle.
2) Search for the closest vehicle in front of the subject motorcycle and then define it
as the leading vehicle. These two vehicles are defined as a vehicle pair.
3) Filter out the vehicle pairs in which the leading vehicle is not a passenger car.
4) Filter out the vehicle pairs in which the speed of the leading vehicle equals 0
km/hr.
5) Filter out the vehicle pairs in which the speed of the subject vehicle is less than
the speed of the leading vehicle.
6) Calculate the longitudinal headway and the lateral position difference between
the vehicles in each pair.
In this procedure, steps 1) and 2) are used to select the neighbour vehicle pairs
which are in longitudinal following positions. Step 3) selects the vehicle pairs with a
passenger car as the leading vehicle. Step 4) and step 5) are used to ensure that the vehicle
pairs are in vehicle-following relationship. Finally, the longitudinal headways and the
lateral position differences are calculated in step 6). The basic analyses of the information
Difference in lateral position
Longitudinal headway Lateral distance to the right edge
Regime of longitudinal following
w/2
w/2
w dw

100
obtained from this procedure will be presented in the following subsection.
6.1.2 Properties of the longitudinal headway
In this subsection, the relative location of the vehicle pairs in longitudinal following
relationship and their headway distribution are analysed. In addition, the influences of the
flow density, the speed difference and the speed of the preceding vehicle on the headways
are investigated.
6.1.2.1 The relative locations of the vehicle pairs
The scatter plots of the longitudinal gaps against the lateral position differences are
shown in Figure 6.2. In these plots, each point represents a following motorcycle. Its
longitudinal gap to the preceding vehicle is showed on the horizontal axis and the lateral
position difference within this vehicle pair is presented on the vertical axis. Hence, the
relative locations of the vehicle pairs are displayed in a two-dimensional manner.
More specifically, Figure 6.2a and Figure 6.2b illustrate the frequency of the
observations per m2. In Figure 6.2c, Figure 6.2d and Figure 6.2e, the effects of the flow
density, the speed difference and the speed of the preceding vehicle on the relative
positions of the vehicle pairs are shown respectively. The flow density here is defined as
the ratio of the road space occupied by vehicles. From these plots, some points can be
concluded:
1) The scattered pattern provides evidence for the unique behaviour characterised in
Section 2.1.3.1, i.e. a motorcycle will maintain a shorter headway when
following the preceding vehicle by aligning to its lateral edge.
2) This data set demonstrates that the flow density, the speed difference and the
speed of the preceding vehicle are related to the following distances (see Figure
6.2c, Figure 6.2d and Figure 6.2e). The vehicle pairs with smaller following
distances are observed frequently under the conditions of high density flows, low

101
speed differences and low leading speeds.
Figure 6.2 The scatter plots of the longitudinal following relationship
��������� � ��� ��� ���� �� �� �� �� �� �� �� �� ��
� �� ���� �� ! �! �"# !$$ ���"%�
� & �
� & �
& �
� & �
' & �
' � & �
' � & �
Density < 0.1 0.1�Density<0.2 Density � 0.2
(c) The scatter plot by the flow density
(m)
(m)
��������� � ��� ��� ���� �� �� �� �� �� �� �� �� ��
� �� ���� �� ! �! �"# !$$ ���"%�
� & �
� & �
& �
� & �
' & �
' � & �
' � & �
0<speed dif. <10 10�speed dif.<20 20�speed dif.<30 speed dif.�30(km/h)
(d) The scatter plot by the speed difference
(m)
(m)
��������� � ��� ��� ���� �� �� �� �� �� �� �� �� ��
� �� ���� �� ! �! �"# !$$ ���"%�
� & �
� & �
& �
� & �
' & �
' � & �
' � & �
Freq./m2
25 20 15 10 5
(a) The frequency of the relative positions (b) The contour of the frequency
(m)
(m)
��������� � ��� ��� ���� �� �� �� �� �� �� �� �� ��
� �� ���� �� ! �! �"# !$$ ���"%�
� & �
� & �
& �
� & �
' & �
' � & �
' � & �
(m)
0<Speed < 20 20�Speed<40 Speed�40(km/h)
(e) The scatter plot by the speed of the preceding vehicle
(m)

102
6.1.2.2 The effects of the lateral position difference on the headway
distribution
Through analysing the relative positions of the vehicle pairs, it is found that a
motorcycle would like to maintain a shorter headway while following the preceding
vehicle by aligning to its lateral edge. A plausible explanation to this observation is that
by aligning to the lateral edge of the preceding vehicle, the following vehicle can easily
swerve away to avoid a possible collision. Therefore, the relationship between the
longitudinal headway and the lateral distance needed to avoid a collision, dw, is
analysed.
In this analysis, the data are categorised into two groups: swerving to the left and
swerving to the right, divided by the central line of the preceding passenger car. Each
group is divided further into two sub-group according to the lateral distance needed to
swerve. The statistical properties and the histogram of the longitudinal headways in these
sub-groups are estimated and plotted in Table 6.1 and Figure 6.3 respectively. The
characteristics of the headway distributions are discussed below:
Table 6.1 The statistical properties of the longitudinal headways by lateral position difference
Lateral distance to avoid collision (m)
N Mean SD Median Mode a �b �
b K-S test c for lognormality
To the right edge 375 15.56 13.84 11.31 3.86 2.33 0.99 0.10 (a) 0�dw<0.5 136 15.19 14.02 10.31 3.49 2.27 1.01 0.43 (b) dw � 0.5 239 15.78 13.75 11.99 4.17 2.37 0.97 0.32
To the left edge 426 17.57 14.36 13.42 5.13 2.50 0.93 0.32 (c) 0�dw<0.5 209 18.42 15.34 13.90 4.85 2.52 0.97 0.49 (d) dw � 0.5 217 16.76 13.32 12.84 5.64 2.49 0.89 0.81
Total 801 16.63 14.14 12.50 4.47 2.42 0.96 0.03
a. Mode is calculated by assuming the longitudinal headway is lognormally distributed, i.e. 2
Mode σµ −= e . b. � and � are the mean and standard deviation of the logarithm of longitudinal headways. c. Estimated by using the statistical software R (Venables et al., 2006).

103
Figure 6.3 The frequency distributions of the longitudinal headways
1) The One-sample Kolmogorov-Smirnov test (p-values in Table 6.1) shows that
the longitudinal headway distributions of all the sub-groups follow the
lognormal distribution.
2) When analysing the effects of the lateral positions on the headways, it is found
that following distances in the right half area are significantly smaller than those
in the left half area. Since these headways are lognormally distributed, this result
is obtained by testing the equality of the means of the longitudinal headways’
logarithm, �. The value of � in the right half area, 2.33, is significantly different
from that in the left half area, 2.50 (t-test, p=0.012, two-tailed).
3) It is found that motorcyclists in different halves maintain different speed
differences. In the right half, the average speed difference is 9.92 km/h, which is
significantly different from that in the left half, 11.44 km/h (t-test, p=0.027,
(m)
(m)
Lognormal curve Lognormal curve
(m)
(a) To the right edge (0�dw<0.5) (b) To the right edge (dw �0.5)
Lognormal curve Lognormal curve
(m)
(c) To the left edge (0�dw<0.5) (d) To the left edge (dw �0.5)

104
two-tailed).
4) The reasons for the differences mentioned in 2) and 3) might be linked to the
geometric layout of the link surveyed. In the database, most of the longitudinal
following motorcycles are observed in the second lane to the sidewalk. As the
inner lane (the lane near the sidewalk) is the parking lane and sometimes it is
empty, the motorcyclists in the left half of the second lane have more freedom to
move to the inner lane and thus can maintain longer headways and higher speed
differences to the preceding vehicles. On the other hand, the motorcyclists in the
right half are constrained by the traffic, so their choices of headways and speeds
are limited. Moreover, the motorcyclists who progress near the fast lane are
comparatively more aggressive, so they are more likely to maintain shorter
headways.
5) The values of the modes of the frequency distributions in Table 6.1 show a trend
that the motorcycles followed closer when aligning to the lateral edge of the
preceding vehicles. This finding is consistent with the assumption of the
longitudinal headway model.
6) The above analyses confirm that motorcyclists behave differently as following in
different areas behind the leading vehicles
6.1.2.3 The effects of the flow density, the speed difference and the leading
speed
The data set is analysed further to understand how the flow density, the speed
difference and the speed of the preceding vehicle affect the following distances of
motorcycles. The results are displayed in Table 6.2, Table 6.3 and Table 6.4. From these
tables the following conclusions can be drawn:
1) The longitudinal headway distribution of motorcycles follows a lognormal
distribution in most of the conditions except when the leading speed is slow (0

105
km/hr < leading speed < 20 km/hr).
Table 6.2 The statistical properties of the longitudinal headways by flow density Density N Mean SD Median Mode a �
b �b K-S test c for
lognormality
0�density<0.1 297 23.68 16.41 20.25 9.89 2.90 0.78 0.26 0.1�density<0.2 304 14.21 11.09 10.85 5.50 2.36 0.81 0.61 density�0.2 200 9.84 9.32 6.13 2.05 1.82 1.05 0.51
a. Mode is calculated by assuming that the longitudinal headway is lognormally distributed, i.e. 2
Mode σµ−= e . b. � and � are the mean and standard deviation of the logarithm of longitudinal headways respectively. c. Estimated by using the statistical software R.
Table 6.3 The statistical properties of the longitudinal headways by speed difference Speed difference (km/h) N Mean SD Median Mode a �
b �b K-S test c for
lognormality
0�speed difference<10 473 11.52 10.83 7.92 3.21 2.05 0.94 0.64 10�speed difference<20 206 20.27 12.39 18.71 10.46 2.81 0.68 0.15 20�speed difference<30 79 25.50 15.97 23.41 12.03 3.02 0.73 0.25 speed difference�30 43 39.10 15.67 38.01 29.30 3.58 0.45 0.70
a.2
Mode σµ−= e . b. � and � are the mean and standard deviation of the logarithm of longitudinal headways. c. Estimated by using the statistical software R.
Table 6.4 The statistical properties of the longitudinal headways by leading speed Leading speed (km/h) N Mean SD Median Mode a �
b �b K-S test c for
lognormality
0�leading speed<20 307 16.27 13.98 12.02 2.97 2.32 1.11 0.01 20�leading speed<40 393 16.29 14.23 11.64 5.24 2.43 0.88 0.83 leading speed�40 101 19.08 14.15 15.57 9.34 2.71 0.69 0.96
a.2
Mode σµ−= e b. � and � are the mean and standard deviation of the logarithm of longitudinal headways. c. Estimated by using the statistical software R.
2) The modes of the headway distributions show the pattern that a lower flow
density, a higher speed difference or a higher speed of the preceding vehicle will
reflect in a longer headway. In addition, the mean of the logarithm of longitudinal
headways, �, also shows this trend.
3) The standard deviation of the logarithm of longitudinal headways, �, is not
constant. In addition, it is generally negatively related to �, with only a minor
exception in Table 6.3.

106
4) The above analyses imply that the specification of the longitudinal headway
model should take flow density, the speed difference, the leading speed and the
lateral position into consideration.
6.1.3 Specification of the longitudinal headway model
The main objective of this section is to calibrate the longitudinal headway model
shown in Equation (4.12), which is refined as Equation (6.1) in Section 6.1.3.2. However,
this model is difficult to calibrate due to both the complexity of the equation and the
characteristics of the data. These issues are discussed below:
1) This model indicates that the minimum following distance is the lower bound of
two formulations, Equations (4.4) and (4.11). This could lead to a discontinuity
between these two formulations.
2) The dependent variable (i.e. the following distance) is not normally distributed
(see Section 6.1.2.2). In addition, the conditional variances of the dependent
variable are not constant (see Section 6.1.2.3). Therefore, the method used to
calibrate this model should be able to handle non-normally distributed residuals
and to deal with non-constant variances.
3) The knowledge of the parameters in this model is limited. Thus, statistical tools
based on the assumption of normal distribution are inappropriate for calibrating
this model.
4) The model is multi-dimensional because several parameters are involved.
Therefore, several local optimal calibration results can be found. As a result, the
boundaries of the parameters need to be defined carefully in order to obtain a
decent result.
5) Two error terms are observed in the following behaviour of motorcycles, one
accounting for random effects and the other accounting for the aggression of a

107
motorcyclist. Therefore, this model is an issue of Stochastic Frontier Analysis
(Aigner et al., 1977; Meeusen and van den Broeck, 1977). This point will be
elaborated later in Section 6.1.3.2.
Based on the above analyses, some actions are taken to perform the model
calibration. Firstly, a statistical tool capable of dealing with this calibration process is
chosen. Secondly, some assumptions are made to clarify the reasonable range of the
parameters. Finally, the model is revised further to facilitate the calibration process. The
detailed account of these measures is elaborated in the following parts.
6.1.3.1 The calibration tool
As mentioned earlier, the minimum longitudinal following distance model is
difficult to calibrate due to both the complexity of the equation and the characteristics of
the data. To overcome these difficulties, WinBUGS (Spiegelhalter et al., 2003) is used to
tackle the calibration process.
WinBUGS is a part of the BUGS (Bayesian inference Using Gibbs Sampling)
project (The BUGS Project, 2004), featuring in a graphical user interface and on-line
monitoring. It is a general-purpose software package that uses Markov chain Monte Carlo
(MCMC) methods (Metropolis et al., 1953) to conduct arbitrarily complex Bayesian
analysis. It aims to make MCMC methods practical for applied research (Cowles, 2004).
Markov chain Monte Carlo (MCMC) methods are a class of algorithms that draw a
sequence of samples from probability distributions based on constructing a Markov chain.
In WinBUGS the Gibbs sampling algorithm (Geman and Geman, 1984) is used to
conduct the drawing. The sampling algorithm can determine the transition kernels for the
Markov chain according to the current information and then generate samples from the
probability distributions. After the sequence of samples comprises a Markov chain, i.e.
this sequence of samples achieves convergence, its stationary distributions will

108
approximate the desired probability distributions.
Some important applications of MCMC are based on its ability to numerically
calculate multi-dimensional integrals of complicated probability distributions. One
example is its use on Bayesian statistics. The Bayesian analysis usually needs to integrate the
joint and marginal posterior distributions of the unknown parameters in the model. In
view of this, MCMC methods are well-adapted to sample the posterior distribution of a
Bayesian model. Another example is its application on stochastic frontier models
(Osiewalski and Steel, 1998). The complexity of the stochastic frontier analysis makes
heavy numerical integration inevitable (Lovell and Kumbhakar, 2003). However,
research has demonstrated that the Bayesian approach is feasible for analysing stochastic
frontier models (van den Broeck et al., 1994; Koop et al., 1994; Kim and Schmidt, 2000;
Tsionas, 2002; Kumbhakar and Tsionas, 2005) and WinBUGS is a useful tool for this
application (Griffin and Steel, 2005).
Based on the analyses discussed above, WinBUGS is chosen as the tool for model
calibration in this study because it is powerful and flexible in dealing with the parameters
of which the probability distributions are not known explicitly.
6.1.3.2 Model specifications
The longitudinal headway model, Equation (4.12), has to be refined to facilitate the
calibration work and to fit the data characteristics, as shown in Equation (6.1).
minntD∆ =min{
b
vb
vv tnnt
nt ~22
2,1
"
2−+−τ , )
2(
~21
))(~
(21
)( 2"w
wnt
w
wnt
w
wnt
nt vd
bvd
bbvd
v +−−++∆ τττ }+ u'nt, where
(6.1)
minntD∆ : the minimum longitudinal following of motorcycle n at time t,
vnt : the vehicle n at time t,
�vnt : the speed difference, �vnt =vnt - vnt-1,
vw : the lateral speed of a motorcycle,

109
wntd : the lateral distance needed for motorcycle n at time t to avoid a collision,
b~
: the speculative preceding deceleration,
b" : the desired braking deceleration a following motorcycle,
� : the reaction time and
u'nt : the safety margin.
Equation (4.12) involves several unknown parameters, including the reaction time,
the deceleration of the vehicles and the lateral speed. Some of these parameters are highly
correlated. For example, to stop safely, the delay of reaction time can be compensated by
increasing the brake. The correlation among these parameters will affect the correctness
of the calibration results, so some assumptions and clarification towards these parameters
have to be made.
In addition, in order to apply the Bayesian analysis to this model, each parameter
needs to be assigned a prior probability distribution before the Gibbs sampling starts to
generate data. In the Bayesian framework, a prior probability distribution, or simply
called the prior, is the information about a model parameter before the data are collected.
This information is described by clarifying the reasonable ranges of the parameter and
putting a probability distribution on it.
The refinement and specification of this model, the assumptions about the
parameters and the assignments of the priors are discussed below.
� Introduction of the safety margin
Practically, when motorcyclists are maintaining the following distance by the
principle of collision avoidance, they should preserve an ultimate safety margin into
which they are not willing to intrude before the motorcycle has stopped safely. Such a
concept has also been adapted in Gipps following model (Gipps, 1981).
The safety margin, u'nt, is introduced to the longitudinal headway model by

110
assuming that motorcyclists will consider the safety margin when they are following
longitudinally, as shown in Equation (6.1). u'nt is a non-negative random variable, which
can be regarded as the inefficiency in a stochastic frontier model. In addition, this variable
also represents the aggressive level of a motorcyclist. Its prior is assigned to follow the
uniform distribution with limits of 0 to 10 m:
u'nt ~uniform(0,10)
(6.2)
� The braking decelerations of the following motorcycles
The braking decelerations under the conditions of swerving and non-swerving
manoeuvres, i.e. b'n and bn in Equation (4.12), are assumed to be identical. Practically,
when a motorcycle is not swerving, it can achieve a severer deceleration, compared to the
situation that it is swerving. However, due to the correlation between the deceleration
with swerving and the lateral speed, vw, it is difficult to calibrate both the lateral speed and
the deceleration with swerving in a model simultaneously. Therefore, in order to estimate
the lateral speed, the decelerations b'n and bn are assumed to be identical. Thus, these two
parameters are both replaced by b"n, as shown in Equation (6.1). In addition, the desired
braking deceleration of the following vehicle is a latent variable. It is difficult to specify
this variable for every motorcyclist. Therefore, a stochastic variable b" is employed to
replace b"n.
The prior distribution of the deceleration of the following motorcycle is assigned to
follow a truncated normal distribution. This is based on the observation from the field
data. The acceleration and deceleration of motorcycles in this database exhibit an
un-skewed and leptokurtic frequency distribution with a mean close to 0. In addition, the
mechanical maximum braking capability of motorcycles is around -11 m/sec2
(Biokinetics and Associates Ltd, 2003).
b"~ truncated_normal(0.40,1.512,-11,0) (6.3)

111
� The speculative leading deceleration
In real traffic, the deceleration rate of the preceding vehicle bn-1 cannot be observed
in advance. However, when a driver is following another vehicle, it is of great importance
for him to speculate the deceleration of the preceding vehicle before deciding the
following distance. Therefore, a stochastic variable b~ is introduced to replace bn-1 to
represent the speculative preceding deceleration.
Similar to the decelerations of motorcycles, according to the field data the prior
distribution of the speculative leading deceleration b~
is assigned to follow a truncated
normal distribution restricted in the range between -10 m/sec2 (Ecker et al., 2001) and 0
m/sec2. The prior distribution for this parameter is set to be:
b~
~ truncated_normal(0.09,0.942,-10,0) (6.4)
� The reaction time
The reaction time is set to be a constant, 0.75 sec. The reaction times of
motorcyclists are highly related to their braking decelerations or lateral speeds. These
parameters can substitute each other, so it is difficult to calibrate these parameters
simultaneously in one model. After considering that the reaction time for motorists has
been discussed in many studies (see Section 2.2), it is then safe to assume it as a constant
value.
� The headway distribution
Based on the findings in Section 6.1.2.2, the headway distribution of motorcycles is
assumed to follow a lognormal distribution.
ntD∆ ~lognormal ),( 2ntnt σµ
(6.5)
where ntD∆ is the longitudinal following distance of a motorcycle n at time t; ntµ and
ntσ are the mean and standard deviation of the logarithm of the following distances,

112
which are also known as the scale parameter and the shape parameter respectively. These
two parameters will be elaborated later.
The main purpose of identifying the headway distribution is to define the minimum
following distance minntD∆ . This variable is the dependent variable in Equation (6.1), but
it is also a latent variable which cannot be observed directly. Therefore, definition of
minntD∆ is clarified by using the characteristics of the headway distribution. This is
described in the subsection below.
� The minimum following distance
The minimum following distance minntD∆ in Equation (6.1) is assumed to be the
mode of the longitudinal headway distribution.
minntD∆ =mode( ntD∆ )
(6.6)
The reason for this assumption is that the data were acquired from the traffic flow in
peak hours. In such an environment, most of the motorcycles would follow the leading
vehicle by maintaining the minimum following distance. For a lognormal distribution, the
mode, median and mean are 2σµ −e , µe and 2/2σµ +e . Thus, the minimum following
distance minntD∆ can be formulated as:
minntD∆ = 2
ntnte σµ − . (6.7)
� The moderate following distance
The moderate following distance is introduced to present the following distances of
the average motorcyclists. The moderate following distance, medianntD∆ , is assumed to be
the median, rather than the mean, of the longitudinal headway distribution:
medianntD∆ = nteµ
(6.8)
The reason for using median is that the headway of motorcycles follows a

113
lognormal distribution, so its frequency distribution is skewed. In a skewed distribution,
the extreme values in the longer tail will result in the mean being far from the mode. This
characteristic makes the mean an inappropriate measure of central tendency since it is not
robust to outliers. Further, this issue becomes more critical when considering the fact that
there is no interaction between a vehicle pair with a rather long following distance.
Therefore, in order to reduce the impact of the outliers, the median is employed to
represent the following distances of the overall observations.
� The scale parameter
Given that the longitudinal following distance of motorcycles follows a lognormal
distribution, the scale parameter � is the mean of the logarithm of the following distances.
�� ∆=n t
ntD )ln(µ
(6.9)
However, ntµ in Equation (6.5) is the marginal scale parameter under the
distribution of motorcyclist n and time t. It is not suitable to be estimated by Equation
(6.9). Instead, it can be estimated by using Equation (6.7) or Equation (6.8), which are
reformulated below:
ntµ = 2nt
minnt )Dln( σ+∆
(6.10)
ntµ = )ln( medianntD∆
(6.11)
� The shape parameter
The shape parameter ntσ in Equation (6.5) is assumed to be linearly related to the
leading speed. From the analyses earlier (Section 6.1.2.3), it is found that ntσ varies
according to the leading speed or the flood density.
The flood density is a macroscopic parameter which is related to the spatial
distribution of vehicles. In a high density flow, the right tail of the headway distribution

114
will be compressed and thus the shape of the distribution is affected.
The leading speed is a microscopic parameter which influences the
vehicle-following relationship in a kinematic aspect. A short headway is commonly
observed behind a slowly moving vehicle. Therefore, the leading speed will affect the
minimum following distance and the shape of the headway distribution.
Both the leading speed and the flow density are suitable for describing the shape
parameter of the headway distribution. In fact, these two variables are highly correlated.
Here the leading speed is selected because the use of flood density is computationally
demanding for a microscopic model. In addition, the leading speed and ntσ present a
linear relationship in Table 6.4. As a result, ntσ can be formulated as:
tnnt v ,110 −+= αασ , (6.12)
where 0α and 1α are the coefficients.
In WinBUGS, 0α and 1α are assigned to follow the uniform distribution.
Reasonable finite ranges are given according to the values of ntσ and tnv ,1− obtained
from the field data.
0α ~uniform(0,20) (6.13)
1α ~uniform(-5,20) (6.14)
� The approach to the estimation of the braking decelerations
Due to the lateral speed vw is highly correlated to braking decelerations "b and b~
,
the value of "b and b~
are estimated without considering the swerving manoeuvre.
Under the non-swerving condition, motorcyclists will follow the preceding vehicle by the
moderate following distances, medianntD∆ . Such a moderate following distance would
include a safety margin. Thus, the minimum following distance without swerving
(Equation (4.4)) can be reformulated as:

115
nttnnt
ntmediannt u
b
vb
vvD ++−=∆ −
~22
2,1
"
2
τ ,
(6.15)
where unswervingD∆ is replaced by medianntD∆ . unt is introduced to represent the safety
margin, which is a non-negative random variable. Its prior is defined as:
ntu ~uniform(0,10) (6.16)
By combining Equations (6.5), (6.11), (6.12) and (6.15), the braking decelerations
"b and b~
can be calibrated by the following formulation:
ntD∆ ~lognormal ))(),~22
(ln( 2,110
2,1
"
2
tnnttnnt
nt vub
v
bv
v −− +++− αατ
(6.17)
� The lateral speed
The value of "b and b~
is estimated by considering both the swerving and
non-swerving manoeuvres. The equation for this estimation is the combination of
Equations (6.1), (6.5), (6.10) and (6.12):
ntD∆ ~lognormal ))()()(ln( 2,110
2,110
mintntnnt v,vD −− +++∆ αααα
(6.18)
where minntD∆ is formulated by Equation (6.1). The prior of vw is assigned to be:
vw ~uniform(0,10) (6.19)
6.1.4 The calibration results
This section details the calibration results of Equations (6.17) and (6.18). First, the
framework of the calibration using WinBUGS is presented. Secondly, the process of
convergence assessments is described. Lastly, a detailed account about the calibration
results is provided.

116
6.1.4.1 The framework of the calibration using WinBUGS
In this calibration process, the components of the longitudinal headway models,
Equations (6.17) and (6.18) can be categorised into three groups:
1) The observed variables: The first group comprises the variables which are
observable and available from the database, including the following distance
ntD∆ , the speeds ntv and tnv ,1− , and lateral distance needed for avoiding a
collision wntd .
2) The constant: The second group comprises unknown variables assigned to a
deterministic value. The reaction time τ is the only variable in this group, the
value of which is assumed to be 0.75 sec.
3) The unknown parameters: The third group consists of the parameters needed to
be calibrated, including 0α , 1α , "b , b~
and vw. Three layers of Bayesian
analyses were conducted to calibrate these parameters. This will be discussed
later in this subsection.
This calibration involved two parts. According to the analyses in Section 6.1.2,
when a motorcyclist is following in the right half area behind a passenger car, the
following distance is significantly smaller than that in the left half. Therefore, data from
both halves, 375 observations in the right half and 426 in the left, were used to calibrate
the unknown parameters.
Three MCMC chains were run with a burn-in of 5,000 iterations. Then, the MCMC
models were examined to ensure having converged after 20,000 iterations. The process of
the convergence assessment will be discussed later in Section 6.1.4.2. In each iteration of
the MCMC simulation, three layers of Bayesian analyses were conducted. The whole
process is shown in Figure 6.4, which is presented in the style of DoodleBUGS
(Spiegelhalter, 2003), the graphical interface of WinBUGS.

117
Figure 6.4 The calibration of the longitudinal headway model using WinBUGS
In Layer 1, the shape parameter of the headway distribution ntσ was estimated by
using Equations (6.5) and (6.12). The value of 0α and 1α were obtained here. Then, the
draw of ntσ was retained to become the input data of the second and the third layers.
In Layer 2, the values of the one-side random variable ntu , the desired deceleration
"b and the speculative preceding deceleration b~
were calibrated by using Equation
(6.17). Again, the draws of "b and b~
in this iteration were kept for the calibration of the
lateral speed vw in the last layer.
Finally, in the last layer, the values of the one-side random variable 'ntu , the lateral
speed vw were calibrated by using Equation (6.18).
for i in 1: k
Layer 2
�'[i]
�D'[i] �'[i]
� vn[i] vn-1[i]
ui
b''
b ~
�D'''[i] �'' [i]
vw
ui' dw[i]
b''
b ~
Layer 3
Layer 1
�[i]
�0 �1 �
�D[i] vn-1[i]
: a constant : a stochastic or deterministic node : a logical relationship : a stochastic dependence : the repeated part

118
By this calibration process, the unknown parameters were estimated. In addition,
some relevant variables such as the mean, the mode and the median of the headways
were also calculated. The results are presented in later subsections.
6.1.4.2 The convergence assessment tools
Convergence means that the posterior distributions from the Gibbs Sampling have
eventually reached stationary statuses so these posterior distributions approximate the
desired probability distributions. In WinBUGS the convergence can be diagnosed by
several tools based on running multiple chains in the MCMC simulation. In order to carry
out the convergence diagnosis, three chains were simulated in each iteration. Then, four
measures were employed to investigate the convergence of the model:
1) The trace plots (or history plots): The trace plot is a convergence diagnostic
tool provided by WinBUGS. It presents the graphical summaries for the samples
produced by the Gibbs sampler in each chain. It indicates convergence when the
samples in each chain for every parameter look reasonable and all the chains of
every parameter overlap one another.
2) The plots of the Gelman and Rubin (1992)’s convergence diagnostics: The
modification of the Gelman-Rubin convergence statistic (Brooks and Gelman,
1998) is calculated and presented in this plot. It consists of three lines, one red,
one green and one blue. Once convergence is achieved, the red line is close to 1
and the other two lines are stable.
3) The plots of autocorrelations: Autocorrelation means that the sequential draws
of a parameter from the conditional distribution are correlated. When the level of
autocorrelation is high for a parameter of interest, it is a sign of poor
convergence.
4) The kernel density plots: The plot of the posterior distribution for every
parameter will present a smooth curve when a model has converged.

119
6.1.4.3 The calibration results
The calibration results for each parameter are given in Table 6.5 and Table 6.6. First,
the Markov chains are examined to ensure their convergences. Then, the values of the
parameters are reported. The implications of these results are also discussed.
� Convergence diagnostics
The convergence diagnostic tools show that this model is well-converged for both
halves as:
1) The red lines in the Gelman and Rubin Plots are close to 1.0 and the other two
lines are stable;
2) The plots of autocorrelation indicate that all parameters are mixing well with
autocorrelation vanishing before 30 lags in each case;
3) The trace plots also show that the draws are well mixed because all the chains of
every parameter overlap one another and
4) The kernel distribution curves look reasonable and smooth.
These diagnostics indicate that the models approximate to convergence, i.e. these
stationary distributions of the resulting Markov chains approximate the joint posterior
distributions of interest.
� Verification of the model calibration
The verification of the model calibration involves two stages. The first one is to
examine the convergence of the MCMC simulation. This has been discussed above. The
second stage is to examine the statistics of the headway distribution from the calibration
results. In this stage the estimated values of the average scale parameter µ , the average
shape parameter σ , the mode and the median of the headway distribution are employed
to compare with their counterparts in Table 6.1 to Table 6.4. It is found that these statistics
from the calibration results are rather reasonable.

120
Table 6.5 Calibrating results of the longitudinal headway model (left half) Node Mean S.D. Gelman-Rubin Autocorrelation Trace Kernel density
b~
-4.70 0.69 bhat_ns chains 1:3
iteration5001 10000 15000 20000
0.0
0.5
1.0
1.5
bhat_ns chains 1:3
lag0 20 40
-1.0 -0.5 0.0 0.5 1.0
bhat_ns chains 3:1
iteration24950249002485024800
-10.0 -8.0 -6.0 -4.0 -2.0
bhat_ns chains 1:3 sample: 60000
-10.0 -8.0 -6.0 -4.0
0.0 0.2 0.4 0.6 0.8
b" -4.56 0.48
b_ns chains 1:3
iteration5001 10000 15000 20000
0.0
0.5
1.0
b_ns chains 1:3
lag0 20 40
-1.0 -0.5 0.0 0.5 1.0
b_ns chains 3:1
iteration24950249002485024800
-7.0 -6.0 -5.0 -4.0 -3.0
b_ns chains 1:3 sample: 60000
-8.0 -6.0 -4.0
0.0 0.25 0.5
0.75 1.0
vw 2.62 1.11
lv chains 1:3
iteration5001 10000 15000 20000
0.0
0.5
1.0
lv chains 1:3
lag0 20 40
-1.0 -0.5 0.0 0.5 1.0
lv chains 3:1
iteration24950249002485024800
0.0 2.5 5.0 7.5
10.0
lv chains 1:3 sample: 60000
0.0 2.5 5.0 7.5 10.0
0.0 0.2 0.4 0.6 0.8
minD∆ 5.19 0.52
mini_s_bar chains 1:3
iteration5001 10000 15000 20000
0.0
0.5
1.0
mini_s_bar chains 1:3
lag0 20 40
-1.0 -0.5 0.0 0.5 1.0
mini_s_bar chains 3:1
iteration24950249002485024800
3.0 4.0 5.0 6.0 7.0
mini_s_bar chains 1:3 sample: 60000
3.0 4.0 5.0 6.0 7.0
0.0 0.2 0.4 0.6 0.8
mode 6.98 0.32
mode_s_bar chains 1:3
iteration5001 10000 15000 20000
0.0
0.5
1.0
mode_s_bar chains 1:3
lag0 20 40
-1.0 -0.5 0.0 0.5 1.0
mode_s_bar chains 3:1
iteration24950249002485024800
5.0 6.0 7.0 8.0 9.0
mode_s_bar chains 1:3 sample: 60000
5.0 6.0 7.0 8.0
0.0
0.5
1.0
1.5
median 14.49 0.58
med_ns_bar chains 1:3
iteration5001 10000 15000 20000
0.0
0.5
1.0
med_ns_bar chains 1:3
lag0 20 40
-1.0 -0.5 0.0 0.5 1.0
med_ns_bar chains 3:1
iteration24950249002485024800
12.0 13.0 14.0 15.0 16.0 17.0
med_ns_bar chains 1:3 sample: 60000
12.0 14.0 16.0
0.0 0.2 0.4 0.6 0.8
µ 2.51 0.04
mu_rho chains 1:3
iteration5001 10000 15000 20000
0.0
0.5
1.0
mu_rho chains 1:3
lag0 20 40
-1.0 -0.5 0.0 0.5 1.0
mu_rho chains 3:1
iteration24950249002485024800
2.3 2.4 2.5 2.6 2.7
mu_rho chains 1:3 sample: 60000
2.3 2.4 2.5 2.6
0.0
5.0
10.0
15.0
σ 0.80 0.01
rhobar chains 1:3
iteration5001 10000 15000 20000
0.0
0.5
1.0
rhobar chains 1:3
lag0 20 40
-1.0 -0.5 0.0 0.5 1.0
rhobar chains 3:1
iteration24950249002485024800
0.7 0.75 0.8
0.85 0.9
rhobar chains 1:3 sample: 60000
0.7 0.75 0.8 0.85
0.0
10.0
20.0
30.0
�0 0.85 0.03
alpha0 chains 1:3
iteration5001 10000 15000 20000
0.0
0.5
1.0
1.5
alpha0 chains 1:3
lag0 20 40
-1.0 -0.5 0.0 0.5 1.0
alpha0 chains 3:1
iteration24950249002485024800
0.75 0.8
0.85 0.9
0.95
alpha0 chains 1:3 sample: 60000
0.7 0.8 0.9
0.0 5.0
10.0 15.0 20.0
�1 -0.01 0.00i
alpha1 chains 1:3
iteration5001 10000 15000 20000
0.0
0.5
1.0
alpha1 chains 1:3
lag0 20 40
-1.0 -0.5 0.0 0.5 1.0
alpha1 chains 3:1
iteration24950249002485024800
-0.03 -0.02 -0.01
0.01
alpha1 chains 1:3 sample: 60000
-0.03 -0.02 -0.01 3.46945E-18
0.0
50.0
100.0
150.0
unt 0.71 0.35
u_ns chains 1:3
iteration5001 10000 15000 20000
0.0
0.5
1.0
u_ns chains 1:3
lag0 20 40
-1.0 -0.5 0.0 0.5 1.0
u_ns chains 3:1
iteration24950249002485024800
0.0
1.0
2.0
3.0
u_ns chains 1:3 sample: 60000
-1.0 0.0 1.0 2.0
0.0
0.5
1.0
1.5
'ntu 1.79 0.45
u_s chains 1:3
iteration5001 10000 15000 20000
0.0
0.5
1.0
1.5
u_s chains 1:3
lag0 20 40
-1.0 -0.5 0.0 0.5 1.0
u_s chains 3:1
iteration24950249002485024800
0.0 1.0 2.0 3.0 4.0
u_s chains 1:3 sample: 60000
0.0 1.0 2.0 3.0
0.0 0.25 0.5
0.75 1.0
DIC 12,571 - - - - -
i The actual value is 3.45×10-3.

121
Table 6.6 Calibrating results of the longitudinal headway model (right half) Node Mean S.D. Gelman-Rubin Autocorrelation Trace Kernel density
b~
-3.82 0.53 bhat_ns chains 1:3
iteration5001 10000 15000 20000
0.0
0.5
1.0
1.5
bhat_ns chains 1:3
lag0 20 40
-1.0 -0.5 0.0 0.5 1.0
bhat_ns chains 3:1
iteration24950249002485024800
-7.0 -6.0 -5.0 -4.0 -3.0 -2.0
bhat_ns chains 1:3 sample: 60000
-8.0 -6.0 -4.0
0.0 0.2 0.4 0.6 0.8
b" -4.32 0.54
b_ns chains 1:3
iteration5001 10000 15000 20000
0.0
0.5
1.0
1.5
b_ns chains 1:3
lag0 20 40
-1.0 -0.5 0.0 0.5 1.0
b_ns chains 3:1
iteration24950249002485024800
-7.0 -6.0 -5.0 -4.0 -3.0 -2.0
b_ns chains 1:3 sample: 60000
-8.0 -6.0 -4.0
0.0 0.2 0.4 0.6 0.8
vw 2.70 1.34
lv chains 1:3
iteration5001 10000 15000 20000
0.0
0.5
1.0
lv chains 1:3
lag0 20 40
-1.0 -0.5 0.0 0.5 1.0
lv chains 3:1
iteration24950249002485024800
0.0 2.5 5.0 7.5
10.0
lv chains 1:3 sample: 60000
0.0 2.5 5.0 7.5 10.0
0.0
0.2
0.4
0.6
minD∆ 4.59 0.60
mini_s_bar chains 1:3
iteration5001 10000 15000 20000
0.0
0.5
1.0
1.5
mini_s_bar chains 1:3
lag0 20 40
-1.0 -0.5 0.0 0.5 1.0
mini_s_bar chains 3:1
iteration24950249002485024800
3.0 4.0 5.0 6.0 7.0 8.0
mini_s_bar chains 1:3 sample: 60000
2.0 4.0 6.0
0.0 0.2 0.4 0.6 0.8
mode 5.46 0.36
mode_s_bar chains 1:3
iteration5001 10000 15000 20000
0.0
0.5
1.0
mode_s_bar chains 1:3
lag0 20 40
-1.0 -0.5 0.0 0.5 1.0
mode_s_bar chains 3:1
iteration24950249002485024800
4.0 5.0 6.0 7.0 8.0
mode_s_bar chains 1:3 sample: 60000
4.0 5.0 6.0 7.0
0.0
0.5
1.0
1.5
median 12.51 0.61
med_ns_bar chains 1:3
iteration5001 10000 15000 20000
0.0
0.5
1.0
1.5
med_ns_bar chains 1:3
lag0 20 40
-1.0 -0.5 0.0 0.5 1.0
med_ns_bar chains 3:1
iteration24950249002485024800
10.0
12.0
14.0
16.0
med_ns_bar chains 1:3 sample: 60000
10.0 12.0 14.0
0.0 0.2 0.4 0.6 0.8
µ 2.33 0.04
mu_rho chains 1:3
iteration5001 10000 15000 20000
0.0
0.5
1.0
mu_rho chains 1:3
lag0 20 40
-1.0 -0.5 0.0 0.5 1.0
mu_rho chains 3:1
iteration24950249002485024800
2.1 2.2 2.3 2.4 2.5 2.6
mu_rho chains 1:3 sample: 60000
2.0 2.2 2.4
0.0 2.5 5.0 7.5
10.0
σ 0.85 0.02
rhobar chains 1:3
iteration5001 10000 15000 20000
0.0
0.5
1.0
rhobar chains 1:3
lag0 20 40
-1.0 -0.5 0.0 0.5 1.0
rhobar chains 3:1
iteration24950249002485024800
0.75 0.8
0.85 0.9
0.95
rhobar chains 1:3 sample: 60000
0.75 0.8 0.85 0.9
0.0
10.0
20.0
30.0
�0 0.84 0.03
alpha0 chains 1:3
iteration5001 10000 15000 20000
0.0
0.5
1.0
alpha0 chains 1:3
lag0 20 40
-1.0 -0.5 0.0 0.5 1.0
alpha0 chains 3:1
iteration24950249002485024800
0.7
0.8
0.9
1.0
alpha0 chains 1:3 sample: 60000
0.7 0.8 0.9
0.0
5.0
10.0
15.0
�1 0.00i 0.00ii
alpha1 chains 1:3
iteration5001 10000 15000 20000
0.0
0.5
1.0
alpha1 chains 1:3
lag0 20 40
-1.0 -0.5 0.0 0.5 1.0
alpha1 chains 3:1
iteration24950249002485024800
-0.02 -0.01 0.0
0.01 0.02
alpha1 chains 1:3 sample: 60000
-0.02 0.0 0.02
0.0 25.0 50.0 75.0
100.0
unt 0.63 0.32
u_ns chains 1:3
iteration5001 10000 15000 20000
0.0
0.5
1.0
u_ns chains 1:3
lag0 20 40
-1.0 -0.5 0.0 0.5 1.0
u_ns chains 3:1
iteration24950249002485024800
0.0 0.5 1.0 1.5 2.0
u_ns chains 1:3 sample: 60000
-1.0 0.0 1.0 2.0
0.0
0.5
1.0
1.5
'ntu 0.87 0.39
u_s chains 1:3
iteration5001 10000 15000 20000
0.0
0.5
1.0
u_s chains 1:3
lag0 20 40
-1.0 -0.5 0.0 0.5 1.0
u_s chains 3:1
iteration24950249002485024800
0.0
1.0
2.0
3.0
u_s chains 1:3 sample: 60000
-1.0 0.0 1.0 2.0
0.0 0.25 0.5
0.75 1.0
DIC 10,732 - - - - -
i The actual value is 1.84×10-3. ii The actual value is 4.40×10-3.

122
� The lateral speeds
The estimated lateral speed was 2.62 m/sec for swerving to the left and 2.70 m/sec
for swerving to the right. These speeds are just slightly larger than the average maximum
gait speed of male pedestrians (2.53 m/sec), measured by Bohannon (1997). These
numbers show that motorcyclists were expecting a gentle swerving manoeuvre. However,
this gentle swerving manoeuvre can notably decrease the following distances, from
around 13 m (the median of the headway distribution) to around 6 m (the mode of the
headway distribution). Thus, this can explain the small modal scores presented Table 6.1
to Table 6.4 and also give reasons why motorcyclists were observed following the
preceding vehicles by extremely short headways.
� The desired decelerations and the speculative preceding decelerations
When motorcycles are following by a modest distance, i.e. at the median of the
headway distribution, the average braking decelerations that motorcyclists would like to
undertake were -4.56 m/sec2 for the left half and -4.32 m/sec2 for the right. As to the
speculative preceding decelerations, the motorcyclists from the left half would expect the
preceding vehicles to brake by the deceleration rate of -4.70 m/sec2 and for the
motorcyclists from the right half, the value was -3.82 m/sec2.
These deceleration rates are fairly gentle, compared to the results of Ecker et al.
(2001) and Vavryn and Winkelbauer (2004). These two studies found that common
motorcyclists were capable of applying brakes by up to around -6 to -7 m/sec2. However,
from another viewpoint, a deceleration rate of around -3.9 to -4.6 m/sec2 is severer than
97% of the braking decelerations observed in the database. Therefore, it can be concluded
that the motorcyclists observed were ready to undertake a fairly severe braking
deceleration in their daily experience. However, the deceleration rates in this study were
still mild compared to their maximum braking abilities, which have been found in other
studies.

123
The difference between following in the right-hand area and the left-hand area
behind the preceding vehicle also reflected on the braking decelerations. Since the
following distances in the left-hand area were comparatively longer, the average
deceleration difference (subtract the speculative preceding deceleration from the desired
deceleration) was milder (0.14 m/sec2 for left-hand area versus -0.50 m/sec2 for
right-hand area). This results show that the motorcyclists in the right half were more alert.
� The minimum following distances
Given the deceleration rates and lateral speed discussed above, the average
minimum following distance was 5.19 m for the left half and 4.59 m for the right half.
These numbers were the limits calculated from the physical rules, without considering
psychological issues. If the safety margin 'ntu was taken into account, the minimum
following distance should be longer, ranging between minD∆ and the mode of the
headway distribution. For the left half, it was between 5.19 m and 6.98 m; for the right
half, it was between 4.59 m and 5.46 m.
� The difference between following in the left half and following in the right half
The difference between following in the right-hand area and the left-hand area
behind the preceding vehicle is reflected in many aspects, including the braking
deceleration, the lateral speed, the safety margin, the following distances and the shape of
the headway distribution.
It has been found and analysed in Section 6.1.2 that the following distances in the
left-hand area were comparatively longer. This is consistent with the outcome of the
parameters such as the mode, the median, the minimum following distance and the safety
margin. As the characteristics of headway reflected on the kinematic interactions between
vehicles, the values of deceleration difference (subtract the speculative preceding
deceleration from the desired deceleration) and lateral speeds show that the motorcyclists

124
in the right half were less risk averse. In addition, the shape parameter of the headway
distribution shows that the shape of the distribution hardly changed with the speed of the
leading vehicle (or the flow density) in the left half, but it did in the right half.
6.2 The oblique & lateral headway model
This section focuses on the calibration of the oblique & lateral headway model. As
discussed in Section 4.2.2, the lateral headway is a special case of the oblique headway.
Therefore, the oblique headway is employed to calibrate this model. This section begins
with a description of how the data set for this calibration was retrieved from the database.
Basic analyses of the data set are then presented in Section 6.2.2. Based on these analyses,
Section 6.2.3 provides further specifications and assumptions about the model. Finally,
the parameters in the model are calibrated. The results are described in the final part.
6.2.1 Data selection
The oblique following behaviour is a critical movement of motorcycles to be
examined. To understand this behaviour, a data set consisting of the information of every
vehicle pair in an oblique following relationship was obtained from the database. The
information in this data set includes the oblique gap, the following angle, the speed
difference and the leading speed. The data set for this analysis is selected from the
following sequence:
1) Select every motorcycle in the database as the subject vehicle.
2) Search for the closest vehicle at the oblique front of the subject motorcycle and
define it as the leading vehicle. These two vehicles are defined as a vehicle pair.
3) Filter out the vehicle pairs in which the speed of the subject vehicle is less than
the speed of the leading vehicle.
4) Filter out the vehicle pairs where the subject vehicle is progressing in the inner

125
lane (the nearest lane to the sidewalk).
5) Calculate the variables needed for the oblique & lateral headway model, such as
following distance, the speed difference and the following angle.
Steps 1) and 2) are used to select the neighbour vehicle pairs which are in oblique
relative positions. Step 3) is used to ensure that the pairs are in the vehicle-following or
overtaking relationship.
Step 4) is used to rule out the vehicle pairs without interactions near the inner lane.
In the survey site, the inner lane is used for on-street parking. Passenger cars seem to use
the inner lane less frequently whereas motorcycles use it more frequently when there is
available road space. As a result, the motorcycles progressing in this lane usually have
weak lateral or oblique interactions with other vehicles because they can keep a certain
lateral clearance easily. Under this circumstance, step 4) is used to exclude these
situations. Finally, by step 5), a data set for model calibration can finally be obtained.
In addition, it is worthwhile to point out that the oblique following distance is
defined as the closest corners between two vehicles in oblique following relationship, as
shown in Figure 4.4.
6.2.2 Properties of the oblique headway
The oblique & lateral headway model assumes that the following distance is a
function of the following angle. Hence the relationship between the following angle and
the following distance is investigated. Also, the oblique (or lateral) headway distribution
of motorcycles is identified.
Table 6.7 shows the statistical properties of the oblique headways, categorised by
the following angles. Their histograms of frequency distributions are illustrated in
Figure 6.5. Several important characteristics are discussed below:

126
Table 6.7 The statistical properties of the oblique headways Lateral distance to avoid collision (m)
N Mean SD Median Mode a �b �
b K-S test c for lognormality
Following at rear right (a) �� 300 ≤< θ 459 9.47 8.15 7.11 3.42 1.92 0.83 0.49 (b) �� 6030 ≤< θ 137 3.58 2.13 3.18 1.81 1.07 0.69 0.36 (c) �� 9060 << θ 85 2.40 1.35 2.14 1.37 0.70 0.62 0.68
Following at rear left (d) �� 030 <≤− θ 467 8.77 8.50 5.79 3.18 1.83 0.82 0.10 (e) �� 3060 −<≤− θ 151 2.94 1.34 2.85 1.89 0.95 0.56 0.15 (f) �� 6090 −<<− θ 68 2.15 0.92 2.23 1.48 0.65 0.51 0.22
a. Mode is calculated by assuming the longitudinal headway is lognormally distributed, i.e. 2
Mode σµ −= e . b. � and � are the mean and standard deviation of the logarithm of oblique headways. c. Estimated by using the statistical software R.
Figure 6.5 The frequency distributions of the oblique headways
1) The oblique headway distributions of all the sub-groups follow the
lognormal distribution. This finding is based on the one-sample Kolmogorov
-Smirnov test (p-values in Table 6.7).
2) Table 6.7 shows a pattern that the following distances become smaller as the
Lognormal curve Lognormal curve
(m) (m) (m)
(d) At the rear left (- �30 θ≤ < �0 ) (e) At the rear left (- �60 θ≤ <- �30 ) (f) At the rear left (- �90 <�<- �60 )
Lognormal curve Lognormal curve Lognormal curve
(m) (m) (m)
(a) At the rear right ( �0 < �30≤θ ) (b) At the rear right ( �30 < �60≤θ ) (c) At the rear right ( �60 <�< �90 )
Lognormal curve

127
following angles get wider.
3) There is no significant difference in the following distance between
following at the rear left and at the rear right. The t-test is employed to test
the logarithm of the following gaps. The results show that following distances in
groups (a), (b) and (c) of in Table 6.7 are not significantly different from groups
(d), (e) and (f) (two-tailed t-test, 0.084, 0.112 and 0.588) respectively.
6.2.3 Specification of the oblique & lateral headway model
The main objective of this section is to calibrate the oblique & lateral headway
model, Equations (4.17) and (4.18). The calibration of this model experiences similar
difficulties that the calibration of the longitudinal headway model has encountered.
Therefore, the technique of Bayesian analysis is introduced to this calibration process.
The detailed specifications of the model are described in this subsection.
� The oblique & lateral headway distribution
It is assumed that the oblique (or lateral) headway follows the lognormal
distribution. This assumption is based on the findings in Section 6.2.2. Therefore,
obliquentD∆ ~lognormal ),(
2obliquent
obliquent σµ ,
(6.20)
where obliquentD∆ is the oblique following distance of a motorcycle n at time t; oblique
ntµ and
obliquentσ are the scale parameter and the shape parameter of the lognormal distribution
respectively.
� The scale parameter
The scale parameter obliquentµ is linked to the oblique headway model by assuming
the minimum oblique following distance is the mode of the oblique headway distribution.
The reason for this assumption is similar to that of the longitudinal headway model, i.e.

128
most of the motorcycles would follow the leading vehicle by maintaining the minimum
following distance in peak hours of the congested urban networks.
min,obliquentD∆ =
2obliquent
obliquente σµ −
(6.21)
2)( oblique
ntmin,oblique
ntobliquent Dln σµ +∆= ,
(6.22)
where min,obliquentD∆ is the minimum oblique following distance, which can be described
by using Equation (4.17) or Equation (4.18):
min,obliquentD∆ =
ntntminlat
minlatntt,n
minlongnt
minlong
minlong sinvcosvv θααθααα 22
1022
1210 )()( ∆+++∆+ − (6.23)
min,obliquentD∆ =
ntntlatlatnttnlongntlonglong
ntlatlattnlongntlonglong
vvv
vvv
θααθαααααααα
cos)(sin)(
)()(min
1min
0,1min
2min
1min
0
min1
min0,1
min2
min1
min0
∆+++∆+∆+×+∆+
−
−
(6.24)
where 0longα , 1longα , 2longα , 0latα and 1latα are the coefficients. In WinBUGS, these
coefficients are assigned to follow the uniform distribution. In addition, reasonable finite
ranges are given.
0longα uniform~ (-1,10) (6.25)
1longα uniform~ (0,10) (6.26)
2longα uniform~ (0,10) (6.27)
0latα uniform~ (0,10) (6.28)
1latα uniform~ (0,10) (6.29)
� The shape parameter
Three alternative assumption have been made to the shape parameter obliquentσ :
1) obliquentσ is a function of the following angle θ based on the formula of the

129
ellipse.
ntlatntnlonglongobliquent )v( θβθββσ 2222
110 sincos ++= − . (6.30)
2) obliquentσ is a function of θ based on the formula of the hypotenuse in a right
triangle.
obliquentσ =
θβθβββββ
cossin)(
)(
110
110
latnlonglong
latnlonglong
v
v
++×+
−
− .
(6.31)
3) obliquentσ is linearly related to θ and 1−nv (Equation (6.32)).
ntnobliquent v θβββσ 2110 ++= −
(6.32)
In these equations, �long0, �long1, �lat, �0, �1 and �2 are the coefficients. In Equations
(6.30) and (6.31), the semimajor axis of the ellipse (see Figure 4.3a) and the longer leg of
the right triangle (see Figure 4.3b) are assumed to be a function of the leading speed. The
main reason for this assumption is that the leading speed can reflect the flow density,
which affects the headway distribution significantly. This point has been discussed earlier
when specifying the shape parameter for the longitudinal headway model in Section
6.1.3.2. The leading vehicle speed is used in these equations.
In WinBUGS, the coefficients are assigned to follow the uniform distribution. In
addition, reasonable finite ranges are given according to the values of obliquentσ obtained
from the field data.
0longβ uniform~ (-1,10) (6.33)
1longβ uniform~ (0,10) (6.34)
latβ uniform~ (0,10) (6.35)
0β uniform~ (0,10) (6.36)

130
1β uniform~ (0,10) (6.37)
2β uniform~ (0,10) (6.38)
� The models to calibrate
Through the above discussion, the oblique & lateral headway model is developed
into three forms. These are summarised below:
1) The elliptic model: the elliptic model is given by Equations (6.20), (6.22), (6.23)
and (6.30) and is repeated below:
obliquentD∆ ~lognormal ),(
2obliquent
obliquent σµ ,
2)( oblique
ntmin,oblique
ntobliquent Dln σµ +∆= ,
min,obliquentD∆ =
ntntminlat
minlatntt,n
minlongnt
minlong
minlong sinvcosvv θααθααα 22
1022
1210 )()( ∆+++∆+ −
ntlatnttnlonglongobliquent v θβθββσ 2222
,110 sincos)( ++= − (6.39)
2) The triangular model: the triangular model is given by Equations (6.20), (6.22),
(6.24) and (6.31) and is repeated below:
obliquentD∆ ~lognormal ),(
2obliquent
obliquent σµ ,
2)( oblique
ntmin,oblique
ntobliquent Dln σµ +∆= ,
min,obliquentD∆ =
ntntlatlatnttnlongntlonglong
ntlatlattnlongntlonglong
vvv
vvv
θααθαααααααα
cos)(sin)(
)()(min
1min
0,1min
2min
1min
0
min1
min0,1
min2
min1
min0
∆+++∆+∆+×+∆+
−
− ,
obliquentσ =
ntlatnttnlonglong
lattnlonglong
v
v
θβθβββββ
sinsin)()(
,110
,110
++×+
−
−
(6.40)
3) The triangular model with linear shape parameter: this model is given by
Equations (6.20), (6.22), (6.24) and (6.32) and is repeated below:

131
obliquentD∆ ~lognormal ),(
2obliquent
obliquent σµ ,
2)( oblique
ntmin,oblique
ntobliquent Dln σµ +∆= ,
min,obliquentD∆ =
ntntlatlatnttnlongntlonglong
ntlatlattnlongntlonglong
vvv
vvv
θααθαααααααα
cos)(sin)(
)()(min
1min
0,1min
2min
1min
0
min1
min0,1
min2
min1
min0
∆+++∆+∆+×+∆+
−
− ,
nttnobliquent v θβββσ 2,110 ++= −
(6.41)
Their calibration results are presented in the following subsection.
6.2.4 The calibration results
The calibration of the three models (Equations (6.39), (6.40) and (6.41)) was
undertaken using WinBUGS. The calibration results are presented in this subsection.
6.2.4.1 The framework of the calibration using WinBUGS
In this calibration process, the oblique following distance obliquentD∆ , the speed
difference ntv∆ , the preceding speed tnv ,1− and the following angle ntθ are observable
and available from the database. The parameters needed to be calibrated are the
coefficients 0longα , 1longα , 2longα , 0latα , 1latα , 0longβ , 1longβ , latβ , 0β , 1β and 2β .
The details of the calibration process are presented in this subsection.
The observations with motorcycles following at the rear right of the leading
vehicles were chosen for this calibration. The reasons for this choice were:
1) Since it was found that there was no significant difference between following at
the rear left and the rear right (Section 6.2.2), it is not necessary to calibrate both
of them.
2) Motorcyclists riding near the inner lane were found to have weaker lateral and
oblique interactions.
Three MCMC chains were run with a burn-in of 5,000 iterations. Then, the model
was examined to ensure convergence after 20,000 iterations. The whole process is shown

132
in Figure 6.6 using DoodleBUGS.
Figure 6.6 The calibration of the oblique & lateral headway model using WinBUGS
6.2.4.2 The calibration results
The calibration results are listed in Table 6.8, Table 6.9 and Table 6.10. First, the
Markov chains are examined to ensure that convergence has occurred. Then, the values of
the parameters are reported. Finally, the implications of these results are also discussed.
� Convergence diagnostics
The convergence diagnostic plots indicate that all the three models approximate to
convergence. This is concluded by using the techniques for analysing the convergence of
the model described in Section 6.1.4.2. The convergence of these models means that the
stationary distributions of the resulting Markov chains also approximate the joint
: a constant : a stochastic or deterministic node : a logical relationship : a stochastic dependence : the repeated part
vn-1[i]
�Doblique[i]
�oblique[i] �oblique[i]
�long0
�lat
�v[i] �[i]
�long0
�long1
�long2
�lat0
�lat1
�long1

133
posterior distributions of interest.
Table 6.8 Calibrating results of the oblique & lateral headway model using the elliptic model
Node Mean S.D. Gelman-Rubin Autocorrelation Trace Kernel density
�long0 0.28 0.26 a chains 1:3
iteration5001 10000 15000 20000
0.0
0.5
1.0
1.5
a chains 1:3
lag0 20 40
-1.0 -0.5 0.0 0.5 1.0
a chains 3:1
iteration24950249002485024800
-1.0
0.0
1.0
2.0
a chains 1:3 sample: 60000
-1.0 0.0 1.0
0.0 0.5 1.0 1.5 2.0
�long1 0.18 0.03
b chains 1:3
iteration5001 10000 15000 20000
0.0
0.5
1.0
b chains 1:3
lag0 20 40
-1.0 -0.5 0.0 0.5 1.0
b chains 3:1
iteration24950249002485024800
0.0 0.1 0.2 0.3 0.4
b chains 1:3 sample: 60000
0.0 0.1 0.2 0.3
0.0
5.0
10.0
15.0
�long2 0.42 0.03
c chains 1:3
iteration5001 10000 15000 20000
0.0
0.5
1.0
c chains 1:3
lag0 20 40
-1.0 -0.5 0.0 0.5 1.0
c chains 3:1
iteration24950249002485024800
0.3
0.4
0.5
0.6
c chains 1:3 sample: 60000
0.2 0.3 0.4 0.5
0.0
5.0
10.0
15.0
�lat0 0.97 0.16
d chains 1:3
iteration5001 10000 15000 20000
0.0
0.5
1.0
d chains 1:3
lag0 20 40
-1.0 -0.5 0.0 0.5 1.0
d chains 3:1
iteration24950249002485024800
0.0 0.5 1.0 1.5 2.0
d chains 1:3 sample: 60000
0.0 0.5 1.0 1.5
0.0
1.0
2.0
3.0
�lat1 0.04 0.03
f chains 1:3
iteration5001 10000 15000 20000
0.0
0.5
1.0
f chains 1:3
lag0 20 40
-1.0 -0.5 0.0 0.5 1.0
f chains 3:1
iteration24950249002485024800
-0.1
0.0
0.1
0.2
f chains 1:3 sample: 60000
-0.1 0.0 0.1
0.0
5.0
10.0
15.0
�long0 0.65 0.04
o chains 1:3
iteration5001 10000 15000 20000
0.0
0.5
1.0
1.5
o chains 1:3
lag0 20 40
-1.0 -0.5 0.0 0.5 1.0
o chains 3:1
iteration24950249002485024800
0.5 0.6 0.7 0.8 0.9
o chains 1:3 sample: 60000
0.5 0.6 0.7 0.8
0.0
5.0
10.0
�long1 0.02 0.01
p chains 1:3
iteration5001 10000 15000 20000
0.0
0.5
1.0
p chains 1:3
lag0 20 40
-1.0 -0.5 0.0 0.5 1.0
p chains 3:1
iteration24950249002485024800
0.0 0.01 0.02 0.03 0.04
p chains 1:3 sample: 60000
0.0 0.02 0.04
0.0 20.0 40.0 60.0 80.0
�lat 0.52 0.04
q chains 1:3
iteration5001 10000 15000 20000
0.0
0.5
1.0
q chains 1:3
lag0 20 40
-1.0 -0.5 0.0 0.5 1.0
q chains 3:1
iteration24950249002485024800
0.3 0.4 0.5 0.6 0.7
q chains 1:3 sample: 60000
0.3 0.4 0.5 0.6
0.0
5.0
10.0
15.0
DIC 3,623 - - - - -

134
Table 6.9 Calibrating results of the oblique & lateral headway model using the triangular model
Node Mean S.D. Gelman-Rubin Autocorrelation Trace Kernel density
�long0 -0.73 0.50 a chains 1:3
iteration5001 10000 15000 20000
0.0
0.5
1.0
1.5
a chains 1:3
lag0 20 40
-1.0 -0.5 0.0 0.5 1.0
a chains 3:1
iteration24950249002485024800
-3.0 -2.0 -1.0 0.0 1.0 2.0
a chains 1:3 sample: 60000
-4.0 -2.0 0.0
0.0 0.25 0.5
0.75 1.0
�long1 0.43 0.07
b chains 1:3
iteration5001 10000 15000 20000
0.0
0.5
1.0
1.5
b chains 1:3
lag0 20 40
-1.0 -0.5 0.0 0.5 1.0
b chains 3:1
iteration24950249002485024800
0.0 0.2 0.4 0.6 0.8
b chains 1:3 sample: 60000
0.0 0.2 0.4 0.6
0.0
2.0
4.0
6.0
�long2 1.57 0.19
c chains 1:3
iteration5001 10000 15000 20000
0.0
0.5
1.0
1.5
c chains 1:3
lag0 20 40
-1.0 -0.5 0.0 0.5 1.0
c chains 3:1
iteration24950249002485024800
0.5 1.0 1.5 2.0 2.5
c chains 1:3 sample: 60000
0.5 1.0 1.5 2.0 2.5
0.0
1.0
2.0
3.0
�lat0 1.17 0.11
d chains 1:3
iteration5001 10000 15000 20000
0.0
0.5
1.0
d chains 1:3
lag0 20 40
-1.0 -0.5 0.0 0.5 1.0
d chains 3:1
iteration24950249002485024800
0.8 1.0 1.2 1.4 1.6 1.8
d chains 1:3 sample: 60000
0.5 0.75 1.0 1.25 1.5
0.0 1.0 2.0 3.0 4.0
�lat1 0.09 0.02
f chains 1:3
iteration5001 10000 15000 20000
0.0
0.5
1.0
f chains 1:3
lag0 20 40
-1.0 -0.5 0.0 0.5 1.0
f chains 3:1
iteration24950249002485024800
0.0
0.05
0.1
0.15
f chains 1:3 sample: 60000
0.0 0.05 0.1 0.15
0.0
10.0
20.0
30.0
�long0 0.58 0.04
o chains 1:3
iteration5001 10000 15000 20000
0.0
0.5
1.0
1.5
o chains 1:3
lag0 20 40
-1.0 -0.5 0.0 0.5 1.0
o chains 3:1
iteration24950249002485024800
0.4 0.5 0.6 0.7 0.8
o chains 1:3 sample: 60000
0.4 0.5 0.6 0.7
0.0 2.5 5.0 7.5
10.0
�long1 0.02 0.01
p chains 1:3
iteration5001 10000 15000 20000
0.0
0.5
1.0
1.5
p chains 1:3
lag0 20 40
-1.0 -0.5 0.0 0.5 1.0
p chains 3:1
iteration24950249002485024800
0.0 0.01 0.02 0.03 0.04
p chains 1:3 sample: 60000
0.0 0.02 0.04
0.0 20.0 40.0 60.0 80.0
�lat 0.89 0.07
q chains 1:3
iteration5001 10000 15000 20000
0.0
0.5
1.0
q chains 1:3
lag0 20 40
-1.0 -0.5 0.0 0.5 1.0
q chains 3:1
iteration24950249002485024800
0.6 0.8 1.0 1.2 1.4
q chains 1:3 sample: 60000
0.6 0.8 1.0 1.2
0.0
2.0
4.0
6.0
DIC 3,479 - - - - -

135
Table 6.10 Calibrating results of the oblique & lateral headway model using the triangular model with linear shape parameter
Node Mean S.D. Gelman-Rubin Autocorrelation Trace Kernel density
�long0 -1.02 0.50 a chains 1:3
iteration5001 10000 15000 20000
0.0
0.5
1.0
1.5
a chains 1:3
lag0 20 40
-1.0 -0.5 0.0 0.5 1.0
a chains 3:1
iteration24950249002485024800
-3.0 -2.0 -1.0 0.0 1.0 2.0
a chains 1:3 sample: 60000
-4.0 -2.0 0.0
0.0 0.25 0.5
0.75 1.0
�long1 0.51 0.07
b chains 1:3
iteration5001 10000 15000 20000
0.0
0.5
1.0
1.5
b chains 1:3
lag0 20 40
-1.0 -0.5 0.0 0.5 1.0
b chains 3:1
iteration24950249002485024800
0.2
0.4
0.6
0.8
b chains 1:3 sample: 60000
0.0 0.2 0.4 0.6 0.8
0.0
2.0
4.0
6.0
�long2 1.70 0.20
c chains 1:3
iteration5001 10000 15000 20000
0.0
0.5
1.0
c chains 1:3
lag0 20 40
-1.0 -0.5 0.0 0.5 1.0
c chains 3:1
iteration24950249002485024800
1.0
1.5
2.0
2.5
c chains 1:3 sample: 60000
0.5 1.0 1.5 2.0 2.5
0.0
1.0
2.0
3.0
�lat0 1.03 0.11
d chains 1:3
iteration5001 10000 15000 20000
0.0
0.5
1.0
1.5
d chains 1:3
lag0 20 40
-1.0 -0.5 0.0 0.5 1.0
d chains 3:1
iteration24950249002485024800
0.5 0.75 1.0
1.25 1.5
d chains 1:3 sample: 60000
0.5 0.75 1.0 1.25 1.5
0.0 1.0 2.0 3.0 4.0
�lat1 0.10 0.02
f chains 1:3
iteration5001 10000 15000 20000
0.0
0.5
1.0
1.5
f chains 1:3
lag0 20 40
-1.0 -0.5 0.0 0.5 1.0
f chains 3:1
iteration24950249002485024800
0.0 0.05 0.1
0.15 0.2
f chains 1:3 sample: 60000
0.0 0.05 0.1 0.15
0.0
10.0
20.0
30.0
�0 0.50 0.04
o chains 1:3
iteration5001 10000 15000 20000
0.0
0.5
1.0
o chains 1:3
lag0 20 40
-1.0 -0.5 0.0 0.5 1.0
o chains 3:1
iteration24950249002485024800
0.3 0.4 0.5 0.6 0.7
o chains 1:3 sample: 60000
0.3 0.4 0.5 0.6
0.0
5.0
10.0
15.0
�1 0.02 0.00i
p chains 1:3
iteration5001 10000 15000 20000
0.0
0.5
1.0
p chains 1:3
lag0 20 40
-1.0 -0.5 0.0 0.5 1.0
p chains 3:1
iteration24950249002485024800
0.0 0.01 0.02 0.03 0.04
p chains 1:3 sample: 60000
0.0 0.01 0.02 0.03
0.0
50.0
�2 0.02 0.04
q chains 1:3
iteration5001 10000 15000 20000
0.0
0.5
1.0
q chains 1:3
lag0 20 40
-1.0 -0.5 0.0 0.5 1.0
q chains 3:1
iteration24950249002485024800
-0.2 -0.1 0.0 0.1 0.2
q chains 1:3 sample: 60000
-0.2 -0.1 0.0 0.1 0.2
0.0 2.5 5.0 7.5
10.0
DIC 3,447 - - - - -
i The actual value is 3.90×10-3.
� Verification of the calibration results
The verification of the model calibration involves three stages. The first one is to
examine the convergence of the MCMC simulation. This has been discussed in the
previous part.
The second stage is to examine the statistics of the estimated parameters of the
oblique headway distribution. Table 6.11 lists the observed and estimated scale
parameters and shape parameters. Table 6.12 lists the deviations of the estimations.
Generally the estimated numbers look reasonable. However, among these models, it
shows a pattern that the elliptic model performs better in the ranges of �� 300 ≤< θ and
�� 9060 << θ whereas the triangular models have less deviations in the range of

136
�� 6030 ≤< θ .
Table 6.11 Comparisons between the estimated and the observed statistics of the oblique following behaviour
Model � � �� 300 ≤< θ Observation (rear right) 1.92 0.83
Observation (rear left) 1.83 0.82 Estimation (elliptic) 1.93 0.78 Estimation (triangular) 2.05 0.65 Estimation (triangular with linear σ ) 2.01 0.62
�� 6030 ≤< θ Observation (rear right) 1.07 0.69 Observation (rear left) 0.95 0.56 Estimation (elliptic) 1.41 0.66 Estimation (triangular) 0.97 0.55 Estimation (triangular with linear σ ) 1.02 0.62
�� 9060 << θ Observation (rear right) 0.70 0.62 Observation (rear left) 0.65 0.51 Estimation (elliptic) 0.76 0.55 Estimation (triangular) 0.89 0.67 Estimation (triangular with linear σ ) 0.75 0.62
Table 6.12 Errors of the estimation results Model � �
�� 300 ≤< θ Elliptic model 2.95% -5.45%
Triangular model 9.36% -21.21%
Triangular model with linear σ 7.10% -24.84% �� 6030 ≤< θ Elliptic model 40.01% 6.14%
Triangular model -3.68% -11.55%
Triangular model with linear σ 1.70% -0.30% �� 9060 << θ Elliptic model 12.13% -3.70%
Triangular model 31.31% 17.32%
Triangular model with linear σ 10.28% 8.56%
In the final stage, the marginal distributions of these models are calculated and
visualised to examine the parameters estimated. These plots are shown in Figure 6.7. The
probability density distribution of the elliptic model are shown in Figure 6.7a and Figure
6.7b, of the triangular model are shown in Figure 6.7c and Figure 6.7d and of the
triangular model with linear shape parameter are shown in Figure 6.7e and Figure 6.7f.

137
Figure 6.7 The contours of the marginal distribution of the oblique & lateral headway model
From these plots, it is found that the elliptic model and the triangular model show
unreasonable pattern of the probability density distribution although the modes of them
present the expected locus. However, the triangular model with linear shape parameter
(a) The frequency of the relative positions (b) The contour of the frequency
(m)
(m)
(c) The frequency of the relative positions (d) The contour of the frequency
(m)
(m)
(e) The frequency of the relative positions (f) The contour of the frequency
(m)
(m)

138
shows ideal marginal distribution. The reason for the unstable distribution pattern of the
former two models could be that the mode of a lognormal distribution is affected by both
the scale and shape parameters. The shape parameter described by the polar coordinate
system will cause rapid change to the tail of the distribution curve when the angle is close
to 90°.
6.2.4.3 Model comparison
The model comparison function of the WinBUGS indicates that the triangular
model with linear shape parameter fit the data better. The model comparison is based on
the Deviance Information Criterion, DIC (Spiegelhalter et al., 2002). DIC is an index
developed for model comparison in the Bayesian analysis approach. A lower DIC
represents a better model. The model with the higher DIC can be ruled out confidently
when the difference is more than 10 (The BUGS Project, 2006). In this case, the DIC
value of the specification of the elliptic model is 3,623, of the triangular model is 3,479
and of the triangular model with linear shape parameter is 3,447. This result is consistent
with the analysis of the marginal distribution of the models (see Figure 6.7).
When comparing the deviations of the estimation results (Table 6.12), it can be
found that the elliptic model performs better in the ranges of �� 300 ≤< θ and
�� 9060 << θ whereas the right triangular model has less deviation in the range of
�� 6030 ≤< θ . This implies that a curve which is flatter than the elliptic curve could be
more appropriate.
Finally, according to the comparison of the DIC values, the patterns of the
probability density distributions and the errors of the estimation results, the triangular
model with linear shape parameter is selected to represent the oblique following
behaviour of motorcycles in this study.

139
6.3 The path choice model
This section presents the calibration of the path choice model. In Chapter 4, the path
choice model has been developed in order to describe how a motorcyclist makes the
decision on making lateral movements, as shown in Equation (4.21). The path choice
behaviour is proposed to be depicted by a multinomial logit model. Here the original
model is re-listed as Equation (6.42) to facilitate the description of the calibration process.
Vl = �l + �1 speedl + �2 forceFl + �3 sizel + �4 distl + �5 clearl + �6 forceRl + �7 lastl
Vc = �1 speedc+ �2 forceFc + �3 sizec
Vr = �r + �1 speedr+ �2 forceFr + �3 sizer + �4 distr + �5 clearr + �6 forceRr + �7 lastr (6.42)
This section begins with the specifications and assumptions about the multinomial
logit model according to the characteristics of the field data. Based on the specifications,
a data set for the model estimation can be generated. Section 6.3.2 describes the
calibration method and tool. Section 6.3.3 describes the model refinements and the
estimation results.
6.3.1 Data selection and the data set
In order to calibrate the path choice model, a data set was selected from the database.
The behaviour of the motorcyclists in the database was analysed so the variables involved
in Equation (6.42) could be retrieved. The details of how the data set was generated are
described below.
1) Select every motorcycle in the database as the subject vehicle.
2) Search for the closest vehicle in front of the subject motorcycle and define it as
the leading vehicle.
3) Filter out the motorcycles with no leading vehicle.
4) Filter out the motorcycles that the leading vehicle is not a four wheeled vehicle.

140
5) Calculate the variables involved in Equation (6.42).
The path choice model aims at describing how a motorcyclist reacts to the
constraint of the preceding vehicle. Steps 1), 2) and 3) control the selection of vehicle
pairs which are in longitudinal following relationship. In addition, a motorcycle is
unlikely to be constrained by a preceding motorcycle due to the narrow and
non-lane-based natures of motorcycles, so the condition of a motorcycle following
another motorcycle is excluded in step 4). Finally, a data set of 1,441 observations was
built. Then the variables involved in the path choice model were calculated. The
generation and calculation of these variables will be discussed further in the following
parts.
6.3.1.1 The choice set
The path choice model in Section 4.3 assumes that there are three alternatives in the
choice set: shifting leftwards, staying straight and shifting rightwards. In order to
calibrate this model, the choices of the motorcyclists should be recognised from trajectory
data. However, the intentions of motorcycles cannot be interpreted merely by observing
their trajectories. For example, the trajectory of a motorcycle does not follow a perfect
line. When it is moving straight ahead, it also exhibits some lateral oscillations. These
oscillations will affect the interpretation of their intentions. Hence, in order to overcome
the ‘white noise’ and have a systematic interpretation of the trajectory data, some rules for
translating the motorcycle trajectories into their choices set were proposed.
1) If a motorcycle’s difference of the lateral positions between time t and t+1 is
larger than 0.5 m, this motorcycle is then defined as choosing shifting leftwards
(or rightwards) at time t.
2) If a motorcycle’s difference of the lateral positions between time t and t+2 is
larger than 0.7 m and it maintains the same course during this period, this

141
motorcycle is then defined as choosing shifting leftwards (or rightwards) at time
t and time t+1.
3) If a motorcycle’s difference of the lateral positions between time t and t+3 is
larger than 0.9 m and it maintains the same course during this period, this
motorcycle is, thus, defined as choosing shifting leftwards (or rightwards) at time
t, time t+1 and t+2.
4) If the motorcycle maintains the same course during the period time t to t+3 and it
has been defined as choosing shifting leftwards (or shifting rightwards) at both
time t and time t+2, accordingly, it is defined as having the same choice at time
t+1.
5) If the motorcycle has changed its preceding vehicle between time t and t+1, and
the interaction (defined by interacting force, see Section 6.3.1.2) with the new
preceding vehicle becomes weaker, this motorcycle is, accordingly, defined as
choosing a lateral movement at time t.
6) Any situations which are not included in the rules above are defined as keeping
straight.
7) If the preceding vehicle and the object (a vehicle or the kerb) beside it are
stationary, and the gap between them is smaller than 0.7 m, the choice through
this path is then defined as unavailable. Here 0.7 m is roughly the width of a
motorcycle.
Finally, the 1,441 observations in this data set can be discretised into three
categories according to the lateral moving condition. The sample frequencies of this
model are shown in the Table 6.13.
It is found that motorcyclists observed in the survey site were more likely to choose
shifting leftwards than shifting rightwards. This finding is consistent with the analyses in
Section 6.1.2.2 and Section 6.2.1. Motorcyclists near the inner lane had longer following

142
distances, higher speed differences and less lateral interaction because the inner lane had
more empty space. Thus, motorcyclists were more likely to shift leftwards when choosing
their paths.
Table 6.13 The sample frequencies of the alternatives Observations %
Shifting leftwards 331 23.0 Keeping straight 983 68.2 Shifting rightwards 127 8.8
Total 1,441 100.0
6.3.1.2 The interacting force
The interacting force is an index for describing the interaction between two vehicles.
It is assumed that the interaction between two vehicles can be quantified by their
kinematic characteristics such as gap, speed difference, relative position, etc. Based on
this assumption, the interacting force can be represented by the headway models
developed earlier. Equations (6.5) and (6.20) are adopted to determine this quantity. The
interaction force is then defined as the survival function (reliability function) of the
lognormal distribution, i.e.
−= 1allongitudinforce Flognormal ),;( 2ntntntD σµ∆
(6.43)
in a longitudinal following relationship and
−= 1obliqueforce Flognormal ),;(2oblique
ntobliquent
obliquentD θθθ σµ∆
(6.44)
in an oblique following relationship. In these two equations, forcelongitudinal and
forceoblique are the longitudinal and oblique interacting forces. Flognormal is the cumulative
distribution function of the lognormal distribution.
The range of the interacting force is between 0 and 1. It reflects the marginal

143
headway distribution of a following pair of vehicles (see Figure 6.7 for the example of
oblique following). For instance, when a motorcycle is following by maintaining a
distance of an interacting force of 0.8, it means that 80% of other motorcyclists will
maintain longer headways than this distance, given the same kinematic conditions.
In this calibration, the variable forceFc, the interaction with the vehicle ahead, is
calculated by using Equation (6.43); the variables forceFl, forceFr, forceRl and forceRr,
the interaction with the vehicle at oblique or lateral positions, is calculated by using
Equation (6.44).
6.3.1.3 Other explanatory variables
In addition to the interacting force, other explanatory variables of the path choice
model are described here.
� The speeds in front and at the oblique front
The speeds of the preceding vehicle and the nearest ‘objects’ beside the preceding
vehicle are calculated for the variable speed in this calibration. The term ‘object’ refers to
the vehicle or kerb at each side of the preceding vehicle. If the object is the kerb, its speed
is then assumed to be equal to the speed of the preceding vehicle.
� The lateral distance to the ready-to-overtake position
The variable dist is the lateral distance to the ready-to-overtake position. There are
two paths for overtaking the preceding vehicle: from the left and from the right, as shown
in Figure 4.6. This variable refers to the lateral distance to the closer path.
� The lateral clearance beside the preceding vehicle
The variable clear is the gap between the preceding vehicle and the object (a vehicle
or the kerb) beside it (at left or at right), as shown in Figure 4.6. If the lateral clearance is
larger than 2.7 m, then its value is fixed to be 2.7 m. This is based on the assumption that

144
the motorcyclist will not feel the utility difference of the width of a path when it is larger
than a certain level. The value 2.7 m is calculated from the width of the motorcycle, 0.7 m,
added by double safety lateral gap, 1 m for each side. The value 1 m is roughly the mode
of the lateral headway distribution for the overtaking model, the value of 0latα in Table
6.8.
� The size of vehicles
The size of a vehicle is calculated by the area it occupies, the length multiplying the
width of the object, as shown in Figure 5.6.
� Last movement
The variable last is a dummy variable, referring to the last movement of the
motorcycle. The value of this variable is defined as 1 if a lateral movement has been made
at the last time step, 0 otherwise.
6.3.2 The calibration tool
The path choice model was estimated using Biogeme (Bierlaire, 2003). Biogeme
(BIerlaire’s Optimization package for GEV Models Estimation) is an open source
package for the maximum likelihood estimation of utility models. It is chosen for
calibrating the path choice model due to the following reasons:
1) It is distributed free of charge.
2) It is a powerful tool capable of estimating discrete choice models including
Generalised Extreme Value (GEV) models and binary probit models.
3) Biogeme is comparatively flexible because of it is an open source package. Users
can expand the programme if they need extra functions.
4) It has complete technical documentation (Bierlaire, 2005) and a good user
support system (http://tech.groups.yahoo.com/group/biogeme/).

145
6.3.3 The calibration results
The calibration results and the model refinement will be presented here. In Section
6.3.3.1, the estimation results of the path choice model are presented. However, some of
these results do not in agreement with the prior expectation for the model. Thus, some
refinements to the original model are made and will be shown in Section 6.3.3.2.
6.3.3.1 The estimation results of the original model
The specification of the path choice model developed in Section 4.3 is summarised
in Table 6.14. The estimation results of this model are listed in Table 6.15.
Table 6.14 The multinomial logit model for path choice behaviour �l �r �1 �2 �3
Shifting leftwards 1 0 Speed of the vehicle at the left of the preceding vehicle (m/sec)
The interacting force between the subject motorcycle and the vehicle at the left of the preceding vehicle
Size of the vehicle at the left of the preceding vehicle (m2)
Keeping straight 0 0 Speed of the preceding vehicle (m/sec)
The interacting force between the subject motorcycle and the preceding vehicle
Size of the preceding vehicle (m2)
Shifting rightwards 0 1 Speed of the vehicle at the right of the preceding vehicle (m/sec)
The interacting force between the subject motorcycle and the vehicle at the right of the preceding vehicle
Size of the vehicle at the right of the preceding vehicle (m2)
�4 �5 �6 �7 Shifting leftwards The lateral distance
for evading the constraint of the preceding vehicle from the left (m)
The lateral clearance between preceding vehicle and its left object (m)
The interacting force between the subject motorcycle and the vehicle at the rear left or left
1 if lateral movement to left is made at the last time step, 0 otherwise
Keeping straight 0 0 0 0
Shifting rightwards The lateral distance for evading the constraint of the preceding vehicle from the right (m)
The lateral clearance between preceding vehicle and its right object (m)
The interacting force between the subject motorcycle and the vehicle at the rear right or right
1 if lateral movement to right is made at the last time step, 0 otherwise
In Table 6.15, most of the coefficients estimated show the expected sign except �2.
�2 represents how the interacting force ahead or at the oblique front affects the path choice
behaviour. When the interacting force from a path is larger, the following motorcyclist
will try to evade it and the probability of choosing this path would be smaller. Hence, the

146
sign of �2 is expected to be negative. However, the estimation results show the value of
this coefficient is 0.24, which is not in agreement with the prior expectation. In addition to
the problem above, the t-test results of �2, �3, and �4 show that these three coefficients do
not differ from 0 at the significance level of 0.05. The critical value for this two-sided test
is ±1.96. Based on the analyses above, some refinements are made to this model. This
will be described in the following parts.
Table 6.15 Estimation results for the path choice model Coefficient Variable name Coefficient
estimate Asymptotic
standard error t statistic
�l Shifting leftwards constant -2.02 0.25 -8.22 �r Shifting rightwards constant -2.65 0.23 -11.49 �1 Speed (m) 0.10 0.01 7.13 �2 Interacting force ahead or at the
oblique front 0.24 i 0.18 1.32 ii
�3 Vehicle size (m2) -0.01 0.01 -1.22 ii
�4 Lateral distance to move (m) -0.04 0.09 -0.41 ii
�5 Lateral clearance of the preceding vehicle (m)
0.39 0.10 3.88
�6 Interacting force aside or at oblique behind
-0.50 0.18 -2.74
�7 The choice of the last time step 3.25 0.15 21.35
Summary statistics
Number of estimated parameters: 9 Number of observations: 1441 Null log-likelihood L(0): -1524.78 Final log-likelihood L(�): -819.337 Likelihood ratio test -2[L(0)-L(�)]: 1410.88 2: 0.462652 Adjusted 2: 0.456749
i is expected to be negative sign. ii fails to pass the t test at significance level of 0.05, two-tailed.
6.3.3.2 Model refinements
In the original model proposed in Equation (6.42), the coefficient �2 shows an
unexpected sign and does not significantly differ from 0. The variable corresponding with
it is the interacting force ahead or at the oblique front. Therefore, some assumptions about
this variable are revised. These specifications are described below. Their estimation
results are listed in Table 6.16.

147
� The interacting force ahead or at the oblique front
Three alternative specifications for the interacting force, forceF, are proposed. Their
descriptions and equations are listed below:
1) Only the interacting forces at the front left and the front right are assumed to
affect the decision-making of a motorcyclist (Equation (6.45)).
2) Only the interacting force ahead is assumed to affect the path choice behaviour
(Equation (6.46)).
3) None of the interacting force ahead or at the oblique front affects the path choice
behaviour (Equation (6.47)).
Vl = �l + �1 speedl + �2 forceFl + �3 sizel + �4 distl + �5 clearl + �6 forceRl + �7 lastl
Vc = �1 speedc + �3 sizec
Vr = �r + �1 speedr+ �2 forceFr + �3 sizer + �4 distr + �5 clearr + �6 forceRr + �7 lastr (6.45)
Vl = �l + �1 speedl + �3 sizel + �4 distl + �5 clearl + �6 forceRl + �7 lastl
Vc = �1 speedc + �2 forceFc + �3 sizec
Vr = �r + �1 speedr + �3 sizer + �4 distr + �5 clearr + �6 forceRr + �7 lastr (6.46)
Vl = �l + �1 speedl + �3 sizel + �4 distl + �5 clearl + �6 forceRl + �7 lastl
Vc = �1 speedc + �3 sizec
Vr = �r + �1 speedr + �3 sizer + �4 distr + �5 clearr + �6 forceRr + �7 lastr (6.47)
The estimation results of the above three equations are shown in Table 6.16. The
value of �2 shows unexpected sign and does not differ from 0 in Equation (6.45). In
Equation (6.46), it shows the expected sign but still does not differ from 0. This means
that the variable forceFc does not affect the choice behaviour. When this variable is ruled
out from the model (Equation (6.47)), the 2 value does not drop significantly. Therefore,
Equation (6.47) seems to be a better specification for the path choice behaviour.

148
Table 6.16 Estimation results for the refinements of the path choice model Equation �l �r �1 �2 �3 �4 �5 �6 �7 �
'1
(6.42) -2.02 -2.65 0.10 0.24 ab -0.01 a -0.04 a 0.39 -0.50 3.25 -
(6.45) -2.28 -2.92 0.09 0.59 b -0.01 a -0.02 a 0.42 -0.46 3.25 -
(6.46) -1.99 -2.64 0.09 -0.26 a -0.01 a -0.06 a 0.37 -0.50 3.23 -
(6.47) -1.93 -2.57 0.10 - -0.01 a -0.06 a 0.37 -0.51 3.24 -
(6.48) -2.18 -2.77 0.10 - 0.01 ab -0.03 a 0.45 -0.47 3.27 -
(6.49) -2.46 -3.16 0.09 - -0.05 -0.07 a 0.40 -0.48 3.26 -
(6.50) -2.53 -3.23 0.09 - -0.05 - 0.41 -0.50 3.27 -
(6.51) -2.93 -3.66 0.14 - -0.06 - 0.42 -0.46 3.27 0.05
Equation Parameters Observations L(0) L(�) -2[L(0)-L(�)] �2 Adj-�2
(6.42) 9 1441 -1524.78 -819.34 1410.88 0.4627 0.4567
(6.45) 9 1441 -1524.78 -816.95 1415.66 0.4642 0.4583
(6.46) 9 1441 -1524.78 -819.73 1410.10 0.4624 0.4565
(6.47) 8 1441 -1524.78 -820.21 1409.14 0.4621 0.4568
(6.48) 8 1441 -1524.78 -819.54 1410.47 0.4625 0.4573
(6.49) 8 1441 -1524.78 -812.67 1424.22 0.4670 0.4618
(6.50) 7 1441 -1524.78 -813.00 1423.57 0.4668 0.4622
(6.51) 8 1441 -1524.78 -807.45 1434.67 0.4705 0.4652
a fails to pass the t test at the significance level of 0.05, two-tailed. b shows the unexpected sign.
From the outcomes, it seems that the interacting force ahead or at the oblique front
is not of most concern to the motorcyclists when they are determining the moving courses.
The results imply that:
1) The motorcyclists could be able to observe the traffic condition ahead in advance
and then make lateral movements before having interacted with the vehicles
ahead or at the oblique front.
2) The motorcyclists could still make lateral movements even if they have been
involved in the congested traffic and have strongly interacted with the vehicles
ahead or at the oblique front.
3) Other factors such as the widths of the lateral clearances are likely to be more
important than the interacting forces ahead or at the oblique front.
Based on this specification, some further revisions of the model specifications are
made. These refinements will be presented later in this section.

149
� The vehicle size
According to the analysis earlier, the estimation results of Equation (6.42) show that
the coefficient of the vehicle size, �3, fails to pass to t-test. Therefore, similar to the
revising procedure done to Equations (6.45) to (6.47), manipulation to the variable of the
vehicle size is made. The equations of these revisions are shown as Equations (6.48) and
(6.49). The former assumes that only the vehicles at the oblique front affect the path
choice behaviour of a motorcyclist, whereas the latter assumes that only the vehicle ahead
affects that of a motorcyclist.
Vl = �l + �1 speedl + �3 sizel + �4 distl + �5 clearl + �6 forceRl + �7 lastl
Vc = �1 speedc
Vr = �r + �1 speedr + �3 sizer + �4 distr + �5 clearr + �6 forceRr + �7 lastr (6.48)
Vl = �l + �1 speedl + �4 distl + �5 clearl + �6 forceRl + �7 lastl
Vc = �1 speedc + �3 sizec
Vr = �r + �1 speedr + �4 distr + �5 clearr + �6 forceRr + �7 lastr (6.49)
The estimation results of these two equations are also shown in Table 6.16. The
value of �3 in Equation (6.48) shows unexpected sign and does not differ from 0.
However, �3 in Equation (6.49) shows reasonable result. This indicates that the size of the
vehicle ahead does affect the path choice behaviour of a motorcyclist, but the sizes of the
vehicles at the oblique front are not the main concern of the motorcyclist. The results
imply that:
1) A large preceding vehicle will obstruct the angle of view of the following
motorcyclist. It also brings higher psychological pressure to the following
vehicles. In addition, heavy vehicles tend to have slower speed. Thus, a
motorcyclist will avoid following behind a large vehicle.
2) When making a lateral moving, motorcyclists worry more about the widths of the
paths rather than the vehicles which form the virtual lanes, so the sizes of the

150
vehicles at the oblique front are not the main concern of the motorcyclist.
� The lateral distance to the ready-to-overtake position
The estimation results of Equation (6.42) show that the coefficient of the lateral
distance to the ready-to-overtake position, �4, also fails to pass to t-test. Therefore, this
variable is excluded from this model. The equation of this revision is shown as Equation
(6.50).
Vl = �l + �1 speedl + �5 clearl + �6 forceRl + �7 lastl
Vc = �1 speedc + �3 sizec
Vr = �r + �1 speedr + �5 clearr + �6 forceRr + �7 lastr (6.50)
The estimation results of the above equation are also listed in Table 6.16. The
comparison of the 2 values between Equations (6.49) and (6.50) shows that it does not
drop significantly (from 0.4670 to 0.4668) after the variable has been ruled out from the
model. This means the difference between the current lateral positions is not the main
concern of a motorcyclist for choosing his lateral moving direction. In fact, the maximum
difference of the lateral distances between to the left path and to the right path is only
around 1.7 m, which is the width of the preceding vehicle. Thus, it is not surprising that
the value of �4 is not significantly different from 0.
� The generic attribute
In Equation (6.50), the variable speed is the only generic attribute shared among all
the three alternatives. Therefore, a test is conducted to examine this generic attribute. The
alternative specific model is proposed as Equation (6.51). Its estimation results are also
listed in Table 6.16.
Vl = �l + �1 speedl + �5 clearl + �6 forceRl + �7 lastl
Vc = �'1 speedc + �3 sizec
Vr = �r + �1 speedr + �5 clearr + �6 forceRr + �7 lastr (6.51)

151
The null hypothesis is that there is no significant difference between Equations
(6.50) and (6.51). The likelihood ratio test statistic (Ben-Akiva and Lerman, 1985b) for
this test is
-2 [L(�G) - L(�AS)] (6.52)
where G and AS are the generic (Equation (6.44)) and the alternative specific (Equation
(6.45)) models, respectively. It is chi-square distributed with the number of degrees of
freedom equal to (KAS-KG), where Kn is the number of parameters in model n.
In this case, the generic model is Equation (6.50) whereas the alternative specific
model is Equation (6.51). The value of the test statistic with 1 degree of freedom is 11.1.
By this value, the null hypothesis is rejected at the significance level of 0.05, as the value
of 20501 .,χ is 3.84.
(KAS-KG)= 8 – 7 = 1 (6.53)
-2 [L(�G) - L(�AS)]= - 2 ( - 813.00 + 807.45 ) = 11.1 (6.54)
In addition, the comparison of the 2 values between Equations (6.50) and (6.51)
shows that the latter has a higher 2. This means that Equation (6.51) comparatively has a
better fit to the data.
� Summary of the model refinement and model calibration
After the refinement process, Equation (6.51) is employed to represent the path
choice behaviour of motorcyclists. The detailed specifications and estimation results are
show in Equation (6.55), Table 6.17 and Table 6.18.
Vl = -2.93 + 0.14 speedl + 0.42 clearl – 0.46 forceRl + 3.27 lastl
Vc = 0.05 speedc – 0.06 sizec
Vr = -3.66 + 0.14 speedr + 0.42 clearr – 0.46 forceRr + 3.27 lastr (6.55)

152
Table 6.17 Refined multinomial logit model for path choice behaviour �l �r �1 �
'1 �2
Shifting leftwards 1 0 Speed of the vehicle at the left of the preceding vehicle (m/sec)
0 0
Keeping straight 0 0 Speed of the preceding vehicle (m/sec)
Size of the preceding vehicle (m2)
Shifting rightwards 0 1 Speed of the vehicle at the right of the preceding vehicle (m/sec)
0 0
� 5 �6 �7
Shifting leftwards The lateral clearance between preceding vehicle and its left object (m)
The interacting force between the subject motorcycle and the vehicle at the rear left or left
1 if lateral movement to left is made at the last time step, 0 otherwise
Keeping straight 0 0 0
Shifting rightwards The lateral clearance between preceding vehicle and its right object (m)
The interacting force between the subject motorcycle and the vehicle at the rear right or right
1 if lateral movement to right is made at the last time step, 0 otherwise
Table 6.18 Estimation results for the refined path choice model Coefficient Variable name Coefficient
estimate Asymptotic
standard error t statistic
�l Shifting leftwards constant -2.93 0.28 -10.53 �r Shifting rightwards constant -3.66 0.29 -12.65 �1 Speed of the vehicles at the
oblique front (m) 0.14 0.02 6.85
�'1 Speed of the vehicle ahead (m) 0.05 0.02 2.56
�3 Vehicle size (m2) -0.06 0.01 -4.14
�5 Lateral clearance of the preceding vehicle (m)
0.42 0.10 4.38
�6 Interacting force aside or at oblique behind
-0.46 0.18 -2.58
�7 The choice of the last time step 3.27 0.15 21.42
Summary statistics
Number of estimated parameters: 8 Number of observations: 1441 Null log-likelihood L(0): -1524.78 Final log-likelihood L(�): -807.445 Likelihood ratio test -2[L(0)-L(�)]: 1434.67 2: 0.470451 Adjusted 2: 0.465204
6.4 Discussion
During the process of model development and calibration, several unsuccessful
attempts have been made. These attempts are reviewed here. In addition, the advantage of
the database developed in Chapter 5, which is flexible and powerful to support the model

153
revision and calibration process, is also discussed.
6.4.1 Tackling the systematic error of the data
In Section 5.4.3, the systematic error of the data caused by pixel resolution was
discussed. This type of error increased along with longitudinal distance. It was
suggested that this error could be controlled by adding an error term to the model which
describes these data. Therefore, unt in Equation (6.17) and 'ntu in min
ntD∆ of Equation
(6.18) were specified to describe this error by assuming that the variances of them were
linearly related to the longitudinal distance of the survey area. Hence, ntu and 'ntu could
be formulated as:
ntu ),(~ 2__ resolutionpixelmarginsafetynormal σµ
(6.56)
resolutionpixel _σ = 0__ resolutionpixelα + realresolutionpixel x1__α (6.57)
'ntu ),(~ 2'
_'
_ resolutionpixelmarginsafetynormal σµ (6.58)
'_ resolutionpixelσ = '
0__ resolutionpixelα + realresolutionpixel x'1__α
(6.59)
In these equations, marginsafety _µ , '_ marginsafetyµ , 0__ resolutionpixelα , 1__ resolutionpixelα ,
'0__ resolutionpixelα and '
1__ resolutionpixelα were the parameters to be calibrated. xreal was the
longitudinal distance in coordinate of the survey site.
When applying these adjustments to the calibration process, however, the MCMC
simulation did not achieve convergence, i.e. the models did not fit the data well after
making these adjustments. This result implied that the variance of the error did not
increase along with the longitudinal distance strictly. Also, the systematic error caused by
the pixel resolution did not dominate the magnitude of the error term.

154
6.4.2 Comparisons between the assumptions of non-lane-based movements and dynamic virtual lane-based movements of motorcycles
There are three alternative assumptions on which the development of the models for
motorcycle behaviour can rest: lane-based movements, non-lane-based movements and
dynamic virtual lane-based movements.
1) Lane-based movements: It has been discussed in Chapter 3 that the
conventional vehicle-following and lane-changing models were developed to
describe the lane-based traffic. Chapter 3 has also concluded that these
lane-based models are not suitable to be applied to motorcycles.
2) Non-lane-based movements: The way that the motorcyclist dodges the possible
collisions is similar to the behaviour of a person in a pedestrian flow. The
simulation of pedestrian behaviour usually uses single equation based on
non-lane based assumption (Helbing et al., 2001; Antonini et al., 2006).
Therefore, this study has tried to model the behaviour of motorcycles by
assuming that the movements of motorcycles are non-lane-based, but it turned
out that this assumption did not work well on mixed traffic modelling and
simulation.
3) Dynamic virtual lane based: The models developed in this study assume that
motorcycles travel according to the virtual lanes formed dynamically by the
vehicles in surroundings.
The differences between the models based on non-lane-based and the dynamic
virtual lane-based assumptions are reviewed below. Through the comparisons, the
reasons that the former assumption is not suitable for describing the motorcycle
behaviour are discussed.

155
� Data selection rules
The data set which is generated based on the non-lane-based assumption could be
biased. For example, as shown in Figure 6.8, given that vehicle A is the subject
motorcycle. When selecting the closest vehicle for calibrating the minimum following
distance, vehicle B will be chosen under the non-lane-based condition. By such a
selecting rule, the vehicles aside or at the oblique front will have higher probability to be
selected as the closest vehicle because the lateral safety distance is far smaller than the
longitudinal safety distance in a traffic flow. Therefore, the selected following distances
at the longitudinal direction are extremely small. This is even significant when comparing
the longitudinal headway distributions between passenger cars and motorcycles.
This is a critical problem because the vehicle-following relationship is the most
important property in road traffic modelling. This bias in describing the longitudinal
headway cannot be ignored.
Figure 6.8 The minimum following distance under the non-lane based assumption
Instead, when the dynamic virtual lane-based assumption is adopted, vehicle D is
the closest vehicle for longitudinal following and vehicle B is the one for oblique
following. It seems that these following relationships in different regimes should be
counted into consideration separately. Therefore, the dynamic lane-based assumption is
more realistic and sensible for describing the motorcycle behaviour.
A
Oblique following Overtaking
Longitudinal following
Oblique following Overtaking

156
� Model specifications: single regime vs. multi-regimes
This study assumes that the behaviour of motorcycles is dynamic lane-based and,
accordingly, categorises the behaviour of motorcycles into three groups under this
assumption, as shown in Figure 2.4. The behaviour patterns of motorcycles in different
regimes are described by different models.
In addition to the models presented in Chapter 4, another model for describing the
motorcycle behaviour has been developed under the non-lane-based assumption. This
model attempted to describe all regimes in a single model. In this model, it was assumed
that the following distance was the function of the following angles �, the speed
differences �v, the lateral distance needed to move wd , the reaction time �, the
speculative leading deceleration b~ and the lateral speed vw. The formulation of the
model was (Lee et al., 2006):
minntD∆ =
ntntntw
wnt
wwnt
wnt
bvvdvbdvv
θτθτττsin)
~(cos
)2(~
5.0)(−∆+
+−+∆
(6.60)
Figure 6.9 The conceptual illustration of Equation (6.60)
It was found that a single equation based on non-lane based assumption is not
suitable for modelling motorcycles. The reasons are:
1) Data for calibration: This point has been described in the previous part. The
vehicle at the oblique or lateral direction is more likely to be selected as an
adjacent vehicle than the vehicle at the longitudinal direction.
2) Moving direction: Although motorcycles have more freedom of lateral
�
wntd

157
movements, they still travel by following the direction of the lanes.
3) Speed and size difference: A mixed traffic flow is heterogeneous in speeds and
sizes but homogeneous in directions. A slow moving vehicle or a large vehicle
can block its following vehicle easily. Being obstructed by a leading vehicle or
not, motorcycle will exhibit total different behaviour patterns.
The above analyses show that the non-lane-based assumption is unsuitable for
describing the behaviour of motorcycles. Thus, the models presented in this study are
developed based on the assumption that motorcycles travel following the dynamic virtual
lanes formed by the vehicles in surroundings.
6.4.3 Comparison between the conventional Stochastic Frontier Analysis and the approach proposed in this section
In Section 6.1.3, a technique similar to the Stochastic Frontier Analysis (SFA) was
presented to calibrate the longitudinal headway model. The longitudinal headway of a
motorcycle was assumed to be lognormally distributed and it was affected simultaneously
by a non-negative error term which represented the inefficiency of the motorcyclist. In
addition, this study has attempted to employ the conventional stochastic frontier
modelling to calibrate the longitudinal headway model, but did not obtain satisfactory
results. The comparison between these two approaches is discussed.
� The Stochastic Frontier Analysis (SFA) model
The typical form of a Stochastic Frontier Analysis model has two error terms, as
shown in Equation (6.61). vi is a random error, usually characterised by a normal
distribution (Equation (6.62)). ui is a non-negative variable which is assumed to account
for technical inefficiency in production. Sometimes ui is an unknown probability
distribution or is specified as a truncated normal distribution (Equation (6.63)).

158
iiii vuxY ++= β (6.61)
vi ~normal ),0( 2vσ
(6.62)
ui ~truncated_normal ),0( 2uσ
(6.63)
When using WinBUGS to calibrate Equation (6.61), the normality of vi is utilised
(Griffin and Steel, 2005). Thus, Equation (6.64) can be formulated by combining
Equations (6.61) and (6.62).
Yi ~ normal ),( 2vii ux σβ +
(6.64)
� Link the approach proposed in this section to the SFA model
In this section, a SFA-like approach is proposed to calibrate the longitudinal
headway model. This SFA-like approach assumes that Yi is lognormally distributed and
the central tendency of the distribution is represented by the mode.
Yi ~ lognormal ),( 2vσµ
(6.65)
mode = xi�+ ui (6.66)
In a lognormal distribution, the mode can be expressed as:
mode = 2σµ −e
(6.67)
By combining Equations (6.65), (6.66) and (6.67), the SFA-like model can be
derived.
Yi ~ lognormal ),)(ln( 22vvii ux σσβ ++
(6.68)
� Model comparison between the SFA and the SFA-like models
To apply the SFA model (Equation (6.64)) to the calibration of the longitudinal
headway model, iY is replaced by ntD∆ to represent the observed headway, xi� is

159
replaced by the minntD∆ of Equation (6.1) to represent the minimum following distance
and ui represents the safety margin, shown in Equation (6.69). Two specifications are
applied to the prior of ui, shown in Equation (6.70) and Equation (6.71).
ntD∆ ~normal( minntD∆ + ui , 2
vσ ) (6.69)
ui ~ uniform (au, bu) (6.70)
ui ~ lognormal ),( 2uu σµ
(6.71)
Equation (6.69) is calibrated by using the data set under the condition that
motorcycles follows in the right half. The results are shown in Table 6.19.
Table 6.19 Comparison of the calibration results between the conventional stochastic frontier analysis and the approach used in this study
Approachi DIC b" b~
vw minD∆
SFA- using Equations (6.69) & (6.70) 2,870 -3.52 -3.33 0.06ii 15.57 SFA- using Equations (6.69) & (6.71) 2,869 -3.53 -3.31 0.07ii 15.69 The SFA-like approach 2,677 -4.32 -3.82 2.70 4.59 i Use the data of following in the right half ii The posterior density distribution curve are not smooth
The results show that the SFA-like approach proposed in this study fits the data set
better than does the conventional SFA approach. The reasons are explained below:
1) The DIC values indicate that the SFA-like approach fits the data better. In
Section 6.2.4.3, the use of DIC has been introduced. In this case, the differences
are around 200. This means the SFA-like model is the better model to describe
the field data.
2) The conventional SFA setup produces some unreasonable results. The values
obtained from the conventional SFA models are not consistent with properties of
the database. For example, the average minimum following distance minD∆
observed from the field data is around 5 m. However, the value calibrated is

160
around 15.5 m, which is around the value of the average speed. In addition, the
posterior densities of the lateral speed vw from the conventional SFA models do
not present smooth curves. According to the principles of diagnosing
convergence (see Section 6.1.4.2), this is a sign of not convergent. All this
implies that the specification of the conventional SFA models cannot describe the
swerving manoeuvres of motorcycles.
3) No evidence supports that vi is normally distributed. The arbitrary assumption
of the normality of vi (Equation (6.62)) could be the reason that the conventional
SFA models cannot describe the headway properly. The assumption made to the
distribution type of vi is the most important prior assignment in the calibration
process (Equation (6.69)). This affects the calibration results significantly.
However, according to the basic analysis of the headway distribution in Section
6.1.2, no evidence can support this assumption. Therefore, the assumption that vi
is normally distributed could be improper.
6.4.4 The advantage of the data collection method
Through the calibration processes, the database developed in Chapter 5 has
demonstrated that it was capable of providing sufficient information for modelling the
motorcycle behaviour.
It has been concluded from the literature review in Section 3.2 that the availability
of the data set was a crucial issue for modelling the motorcycle behaviour by a
microscopic approach. The database developed in Chapter 5 has contained and recorded
all the details of the traffic trajectories from the survey area. Traffic parameters from all
aspects could be generated from the database easily to support the calibration processes.
For example, the calibration of the path choice model required some particular
information such as the lateral moving distance of a motorcycle in the third second earlier

161
(see Section 6.3.1.1). This database could generate these data without difficulties. In
addition, once the proposed model required to be revised dramatically (See 6.4.2 for
example), no supplementary data collection had to be arranged. Above all, through a data
selection approach, the data set could be generated from this database objectively and
thoroughly. This ensured that the data set would not be affected by the subject judgement
of researchers during the data collection and selection process.
In summary, the data collection method employed in Chapter 5 was proven to be
able to support the motorcycle movement study and to provide a wide variety of
information objectively and flexibly.

162
7 The Agent-Based Traffic Simulator
This chapter aims at describing the development of a simulator characterised by
agent-based modelling. The mathematical models developed in the previous chapters are
applied to this simulator, which targets on simulating the mixed traffic flow consisting of
motorcycles and other types of vehicles.
The outline of this chapter is as follows: The first section introduces the concept of
agent-based modelling and its benefits to a traffic simulation system. The second section
describes the specification of the agent-based traffic simulator developed in this study.
The third section presents the verification of this simulator and the final section offers
three applications of this simulator.
7.1 Agent-based modelling
The concept of agent-based modelling was the natural extension of artificial
intelligence, which developed in the late 1950s (O'Sullivan and Haklay, 2000), but it did
not develop rapidly until the beginning of the 1990s (Müller, 1996). From then on,
agent-based modelling has become more and more important for analysing and
understanding complex phenomena (O'Sullivan and Haklay, 2000). Also, this technique
is powerful in terms of investigating the spatially distributed systems of heterogeneous
autonomous actors (Epstein, 1999). Here the relationship between agent-based modelling
and traffic simulation will be elaborated.
7.1.1 The agent and agent-based modelling
� Agents
The term ‘agent’ is a concept without rigid definition. There is a lack of agreement
over what is an agent (Franklin and Graesser, 1997) and what actually constitutes an

163
agent (d'Inverno and Luck, 2001). In this study, this term is defined by summarising the
definitions given by Wooldridge and Jennings (1995), Franklin and Graesser (1997) and
Epstein (1999): an agent is an autonomous software entity which is situated within (or
acts as a component of) an artificial environment, being able to sense and interact to its
neighbour agents and local environments, over time, to achieve its own goal and so as to
effect what it senses in the future.
According to the above definition, the term ‘agent’ here refers to a type of the
artificial life agent (Langton, 1989) and the computational agent (Franklin and Graesser,
1997). Some characteristics of agents can be yielded:
1) Autonomy: agents have internal states (attributes, memory, data, etc.) and are
able to act and make decision without the instructions from central control.
2) Goal-oriented: agents act to meet their design objectives.
3) Interaction: agents act and interact according to the given interaction rules. They
are capable of interacting and communicating with other agents and perceiving
and responding to the changes of their environments.
4) Explicit environment: the environment is the space and time context in which
the agents and events are situated. The environment changes dynamically over
time and could consist of different types of agents.
5) Temporal continuity: agents react in a timely fashion to the changes in the
environment. Their actions in the current time step would affect what they sense
later.
6) Local information and interactions: agents have bounded information and
bounded computing power. They act based on local information; they interact
with neighbours in the environment.
� Agent-based modelling
Agent-based modelling, or multi-agent based modelling, is a microscopic computer

164
simulation technique focusing on simulating the actions and interactions of a cluster of
computational agents. By doing so, the macroscopic phenomena or some emergent
phenomena can be represented by the simulation system. This is a powerful tool for
providing the researchers an insight into a complex system from a bottom-up view, i.e. to
investigate a complex phenomenon by modelling the simple interactions of its
components.
Taking the artificial life agent for example, in an artificial life simulation system, a
virtual man-made landscape is built and some artificial lives are settled. The components
which interact to each other in this system are called agents. By assigning these agents
attributes similar to their counterparts in the real world, this technique is able to represent
the characteristics of a natural living system.
Agent-based modelling is a powerful tool for analysing spatially distributed
systems and for empirical research (Epstein, 1999). This technique has several
advantages, for example, its visual representation medium, its ability to describe
non-linear models, being powerful in empirical research, and being able to alter the
parameters of the model and repeatedly test the sensitivity of theories. In addition, it
enables researchers to observe how the individual behaviour generates the macroscopic
regularities. As reported in many articles, agent-based modelling has been used in a wide
range of domains (O'Sullivan and Haklay, 2000), from the flocking behaviour of animals
(Reynolds, 1987; Dussutour et al., 2004) and human movement patterns (Helbing et al.,
2000) to economic and sociological scopes.
7.1.2 Agent-based modelling and traffic simulation
� Traffic is a complex phenomenon
Traffic is viewed as a complex system (Nagel and Rasmussen, 1994) which is
high-dimensional and non-linear in nature. It is suitable for being investigated by using

165
the agent-based modelling technique because traffic phenomena emerge from the
interactions of drivers, pedestrians, traffic controllers and other components involved.
For example, a vehicle in the traffic flow can be viewed as an agent. It is a part of its
environment, i.e. the traffic networks. This agent can sense and interact with the
environment by knowing the existence and movements other adjacent vehicles on roads.
It continuously exists in the environment (networks) until achieving its goal (reaching the
destination). Thus, the behaviour of vehicles in networks fit the characteristics of agents
defined in Section 7.1.1. The agent-based modelling is believed to be an ideal tool for
simulating the traffic flow.
� Microscopic traffic simulation and agent-based modelling
Traffic simulation models have been developed after the introduction of computers
in 1950s (Skabardonis and May, 1998). These models can be divided into three categories:
microscopic, mesoscopic and macroscopic, which are classified according to the level of
detail of representing the traffic system. Within these three categories, the microscopic
models describe the system based on simulating the movements and interactions of the
system entities. As each vehicle in the system progress in the networks to reach its
destination according to certain rules, this type of traffic simulation models actually
connote the concept of agent-based modelling. However, despite the similarity, not all the
microscopic traffic models are programmed by using the agent-based modelling
technique. There are two simple ways to tell the differences between these two types of
models:
1) The distributed database system: An important characteristic of agent-based
modelling is the distributed database system, which enables each entity to have
its own memory for holding attributes and data. Such database system has the
advantage over the centralised database system when dealing with the
communication and the one-to-multiple interactions (such as the path choice

166
model in Section 4.3) among agents. On the contrary, such relationships and
interactions between entities will make a centralised database complicated.
2) The simulation process: Another way to examine whether a simulation model is
agent-based is to investigate its simulation process. An agent should have
encapsulated all its behaviour, decision-making process, properties and memory
into an autonomous entity. When scheduling the events in the simulation
programme, there would be no complex statements to direct the agents’ actions
in the main simulating procedure. For example, the ‘Swarm-like' procedure
introduced in Sections 7.1.4 and 7.2 is a typical simulation process of
agent-based modelling.
� Agent-based traffic simulation models
Several models have claimed or been claimed to be agent-based. Some of them
were developed for specific objectives which relied on the agent-based technique to
provide better solutions. Nagel and Schreckenberg’s cellular automata model (1992) has
generally been interpreted as an agent-based model. Their model, further developed into
TRANSIMS (Smith, 1995), demonstrated that the complex traffic phenomena were
shown to emerge from the interactions of some simple rules between vehicles. Its
agent-based structure also demonstrated the ability of parallel computing, so a large scale
simulation could be conducted. Bazzan et al. (1999) adopted Nagel and Schreckenberg’s
model (1992) to investigate the impacts of drivers’ long-term route choice strategies on
the traffic in networks. Nagel and Raney (2003) further used this technique to simulate
the route choosing and learning process of up to 7.5 million travellers in the urban
networks. The agent-based model of El Hadouaj et al. (2000) enabled drivers to make
their mid-term plan by reacting to the movements of a cluster of vehicles. Paruchuri et al.
(2002) used an agent-based model to simulate the traffic flow, so the aggressive level of
the drivers can be modelled. Hidas (2005) modelled the lane-changing behaviour in a

167
congested flow in which the vehicles needed to cooperation with others to make
movements.
These simulation models employed the agent-based technique to achieve certain
objectives which were more difficult to be accomplished by using the non-agent-based
programming methods. These models showed that the distributed control system was
capable of dealing with the situations such as one-to-multiple interactions, heterogeneous
traffic, different driving strategies, learning, and cooperation between drivers. These are
important issues that a model for simulating motorcycle behaviour will face.
7.1.3 Agent-based modelling for this study
This study intends to develop a simulator which is able to describe the
two-dimensional movements and decision-making processes of motorcycles in mixed
traffic. However, a traffic system containing motorcycle, particularly in urban networks,
usually has complex interactions among vehicles. The agent-based modelling technique
is chosen for this task due to the following reasons:
1) Heterogeneous traffic: In mixed traffic, different types of vehicles have
different attributes, including vehicles’ physical and kinematic properties,
drivers’ characteristics and behaviour patterns, and drivers’ manoeuvring
strategies and decision-making processes. The variety of the attributes makes the
database arrangement and the software programming complicated. The
agent-based architecture is a solution for this type of problems.
2) Multi-vehicular interaction: The interactions between a motorcycle and its
surroundings are complex. The agent-based technique is suitable for representing
such interaction by providing each agent the computational ability and memory
to identify its neighbourhood and make decisions. For example, in the simulation
programme, in order to simulate the path choice behaviour, the vehicles around

168
the subject motorcycle have to be searched before their relationships to the
subject motorcycle are recognised. After the information has been gathered, the
motorcyclist’s decision of path choice then can be calculated. Using the
agent-based programming architecture will make this software developing
process easier.
3) Conflicts among the manoeuvring strategies: There are conflicts among a
motorcyclist’s manoeuvring strategies when he is moving towards his
destination. The manoeuvring strategies of a motorcyclist could generally be
grouped into three categories, i.e. the short-term, mid-term and long-term plans.
The short-term plan of a motorcyclist is the vehicle following behaviour and the
gap acceptance behaviour. The movements are determined by the vehicle
following models and the rules of gap acceptance. The mid-term plan is decided
by the path choice behaviour, which is the tactic to progress through (or within) a
cluster of vehicles. The long-term plan is to reach the destination of the journey,
which is the goal of the vehicle. Sometimes there are conflicts between these
plans. For example, when a motorcycle is having a long headway, the
vehicle-following model would direct it to speed up and move straight forwards,
whereas the path choice model might suggest it to make a lateral movement to
get a better chance to progress through the cluster of vehicles in front. To deal
with this type of conflicts, the entities in the simulation system should have
memory and the computational ability to make decisions. Again, the
agent-oriented programming is suitable for this task.
4) Cooperation between agents: The term ‘cooperation’ usually refers to that the
entities of a system work together to achieve their common goal. However, the
cooperation behaviour here describes the situation that an agent gives way to
another agent, similar to the study in Hidas (2005). In the conventional

169
microscopic traffic models, vehicles usually react to the environment passively.
However, motorcyclists tend to adopt an active driving style and make progress
by making use of opportunities (Martin et al., 2001). Such driving style
sometimes causes conflicts between different vehicle types. For example,
sometimes motorcyclists pull out into small gaps (Horswill and Helman, 2003),
forcing the lag vehicle to follow by an extremely small safety margin. This is a
condition that the conventional gap acceptance and car-following theories do not
consider. As a result, these conventional theories will direct the lag vehicle to
exhibit unrealistic movements, i.e. it will react to the short following distance by
applying severe brakes. Therefore, these conventional theories cannot represent
the weaving behaviour of motorcycles. However, this type of conflicts can be
tackled by the negotiation and cooperation ability of the agent-based modelling
effortlessly. Through the cooperation between the motorcycle and the lag vehicle,
the latter will anticipate the merging of the motorcycle, make a mid-term plan for
it, and react to the extremely short following distance gently after the motorcycle
has cut in.
From the above discussions, it can be summarised that, generally, a
non-agent-based microscopic traffic simulation model can represent the movements of
the vehicles properly. However, the agent-based modelling is more powerful from the
viewpoint of programming technique. By using an agent-based programming, it is easier
to manage the properties, the memory and the neighbourhood information of the vehicles.
In addition, the distributed nature of the programming technique enhances the
performance of the entities without making the event scheduling process complicated. As
a result, the spatial interactions, the update of local information and the message
exchange between vehicles can be programmed without difficulties. All this makes the
agent-based modelling an ideal tool for this simulator.

170
7.1.4 Selecting the agent-based modelling tool for this study
Currently, a number of programming libraries or software packages developed for
agent-based modelling are available. Also, some microscopic traffic simulation models
which use the concept of agent-based modelling have been developed. This subsection
will, firstly, introduce a number of tools and then determine a suitable one for this study.
� Requirements
In order to meet the nature of this study, several criteria have to be taken into
consideration. These are introduced as follows:
1) Bottom-up approach: The microscopic simulation should provide the support to
define local behaviours of entities.
2) Availability of the source code: The source code of software should be available,
so it can provide the largest flexibility to modify the model.
3) Visual display: The visual representation medium is indispensable to an
agent-based model. In addition, the visual is an important feature in traffic
modelling (Gipps, 1986c), especially for examining the trajectories of
motorcycles in this study.
4) Object-oriented programming: Agent-based modelling can be programmed in
any language, but the object-oriented programming (OOP) languages such as
Java, Visual Basic, C++, etc are the most appropriate (for example, Luck et al.,
1997) because of the similarity between the concept of an agent and an object.
The selected software should be developed by using object-oriented language, so
the inter-agent communication can be simulated easily.
� Agent-based modelling tool kits
There are a number of programming libraries or software packages developed for
agent-based modelling. Several studies (Dugdale, n.d.; Foucart, 2001; Tobias and

171
Hofmann, 2004) have reviewed the advantages and disadvantages of these tools and
concluded that Swarm (Swarm Development Group, 2004) and Repast (Repast
Development Team, 2007) seem to be the better tools for social science studies, as the
others were outstanding in some specific situations.
Between these two software packages, Repast is inspired by Swarm. In addition, it
can take few efforts for transferring between Swarm and Repast because of their identical
‘Swarm-like’ programming approach. Despite their similarity, Foucart (2001) and
Dugdale (n.d.) regarded Swarm as the most powerful and flexible tool for agent-based
modelling although it had a very steep learning curve. However, Tobias and Hofmann
(2004) gave Repast a higher ranking than Swarm because Repast had better terms of
license and online FAQ response. In addition, it was easier to install and use Repast,
which also supported sounder high-level functions for programming.
However, these tool kits, including the Swarm-like packages and other libraries
developed for agent-based modelling, have some limitations when they are applied to this
study:
1) Lattice-based agents: Most of the simulation environments in these tool kits are
based on lattice. In such a context, all the agents basically have the same size and
the relative locations to the neighbours are constrained. This is not suitable for a
traffic simulation because, firstly, the sizes of vehicles vary in the mixed traffic
flow; and, secondly, a space-continuous environment, rather a latticed one, is
needed.
2) The size of the simulation environment: Although this study has tested that the
Repast was capable of reaching the dimensions of 1,000 by 1,000, this was not
enough for traffic modelling. Given that the resolution was 20 cm/lattice, the
simulation environment could only accommodate a space of 200 m by 200 m,
which was not sufficient for a road traffic study.

172
� Microscopic traffic simulation models
Some of the microscopic traffic simulation models have used the concept of
agent-based modelling. The disadvantages of adapting these software packages for this
research are analysed below:
1) Lane-based environment: Most of the microscopic traffic models are developed
mainly for simulating the double-track vehicles. The feasibility of revising the
lane-based environment to the floating lane-based environment can be a
problematic issue.
2) Learning curve: There is a steep learning curve before being proficient in the
modification of the source code of any developed traffic simulation model.
3) Scope: The scope of this study is to simulate the characteristic movements of
motorcycles in a traffic stream. However, the traffic simulation software is
usually developed for simulating a network. This may lead to difficulties and
complexities when revising the original software.
� The tool for this study
Based on the aforementioned analyses, both software packages developed for
agent-based modelling and the ready-made microscopic traffic simulation models seem
to have their limitations and thus are not appropriate for this study. As a result, developing
a tailor-made programme which provides the full flexibility of designing the agent-based
simulation environment is likely to be a better solution for this study.
Finally, the Java language was selected for programming this simulator. Java is an
object-oriented programming language which derives much of its syntax from C and C++.
It was chosen due to the following advantages:
1) Object-oriented programming: Java is an object-oriented programming
language which is suitable for developing an agent-based computer simulation
programme.

173
2) Easy to shift to Swarm or Repast: Swarm and Repast, two powerful and
popular libraries in the area of agent-based modelling, are developed based on
the Java language. Therefore, the code developed in this study can be shifted to
Swarm or Repast easily if necessary.
3) Easy to share the result via the Internet: Java has the characteristic of ‘writing
a programme once, compiling it once, and running it anywhere’. The simulation
results can be presented via the Internet easily.
7.2 The simulator
The simulator for modelling the mixed traffic flow in this study is introduced in this
section. The framework of this simulator adopts the Swarm-like procedure to conduct the
simulation and present the results. This procedure, which is very powerful and flexible for
agent-based modelling, can be largely divided into four parts: agents, the representation,
the user interface and the schedule for activities. These components will be introduced in
turn in the following subsections.
1) Agents: agents including individuals (motorcycles, cars, traffic signals) and
aggregate agents (traffic flow).
2) The environment: the virtual world that creates, runs and displays the agents.
The environment itself is another agent or is constituted by agents.
3) User interface: the objects to receive instructions from users, collect information
from the agents, and output data to files or graphs. The data collectors or
observers can also be regarded as agents.
4) The schedule of activity: the schedule to arrange the time and events for the
agents and the environment.

174
7.2.1 The agents
The agents in this simulator consist of motorcycles and passenger cars. The
specifications of these agents are described in this subsection.
7.2.1.1 Motorcycle
This subsection focuses upon describing the settings of a motorcycle’s properties:
� Dimensions
The size of the motorcycles in this simulator is set to be 0.75 m by 1.65 m.
� Aggressive level
A value to represent the aggressive level of each motorcyclist, n, is sampled from a
uniform distribution, uniform(0, 1), 0�n�1. The larger the value, the more aggressive
behaviour a motorcyclist will exhibit. Other parameters, such as the desired speed, the
lateral speed, the desired braking deceleration and the speculative preceding braking
deceleration, are generated or calculated via this value.
� Desired speed
In the example given in Gipps’ (1981) study, the desired speed of vehicles was
sampled from a normal population, normal(20.0, 3.22) m/sec. Unlike the setup of Gipps’
model, the context of this simulator is based on urban networks. The desired speeds of
motorcyclists are given according to the speed limit, which is assumed to be 13.4 m/sec
(30 mph or 48 km/hr). Thus, the desired speed is set to be truncated-normal-1(n; 13.4,
3.22, 11.2, 14.8) m/sec, where truncated-normal-1 is the inverse truncated normal
cumulative distribution function; n is the aggressive level of the motorcyclist n. The
upper bound and the lower bound of this distribution are set to be 14.8 m/sec (33 mph)
and 11.2 m/sec (25 mph) by default. The value of 33 mph is 10% more than the speed
limit to represent the speeding behaviour of motorcyclists.

175
� Lateral speed
The calibration results shown in Section 6.1.4.3 reveal that in case of emergency,
motorcyclists would like to adopt a lateral speed drawn from lognormal(0.88, 0.412)
when making a leftwards movement and from lognormal(0.88, 0.472) when making a
leftwards movement. The value of the shape and scale parameters are calculated from the
mean and variance of vw (see Table 6.5 and Table 6.6) by assuming its right-skewed
posterior distribution is lognormally distributed.
Thus, the lateral speed of a motorcycle for calculating the longitudinal force is
obtained from lognormal-1(n; 0.88, 0.412) m/sec when making a leftwards movement
and from lognormal-1(n; 0.88, 0.472) m/sec when making a rightwards movement. The
lognormal-1 here is the inverse normal cumulative distribution function. n is the
aggressive level of the motorcyclist n.
The above lateral speeds represent the lateral speeds that motorcyclists are willing
to use when following closely. However, under the normal situations, motorcyclists do
not need to use the maximum lateral speed. The lateral speed for motorcycle steering is
set to be a gentle value, 0.2 m/sec.
� Desired braking deceleration
The desired braking decelerations of vehicles were suggested to be sampled from
normal(-3.4, 0.62) m/sec2 in Gipps’ (1981) application. Here the desired braking
decelerations are estimated by using the longitudinal headway model, drawn from
normal-1(1-n,-4.3, 0.52) (see Table 6.6).
� Speculative preceding braking deceleration
In Gipps’ study, the speculative braking deceleration for the leading vehicle was
suggested to be sampled from min{-3.0, normal(-3.2, 0.32)} m/sec2. In this simulator, the
speculative braking deceleration from a motorcyclist is estimated by using the

176
longitudinal model, drawn from min{-3.0, normal-1(1-n,-3.8, 0.52)} m/sec2 (see Table
6.6).
� Acceleration
The acceleration was suggested to be normal(1.7, 0.32) m/sec2 in Gipps’ study
(1981). The same assumption is used in this study for the motorcyclist.
7.2.1.2 Passenger car
The behaviour of a passenger car in this simulator is comparatively straightforward,
as the only consideration for its movements is the car-following behaviour within its
present lane. The car-following model of Gipps (1981) is adopted here to describe the
interaction between a passenger car and its preceding vehicle. No lane-changing
behaviour is considered for a passenger car.
� Dimensions
The widths of the cars are sampled from a normal distribution, normal(1.6, 0.052) m;
the lengths are sampled from normal(4.3, 0.202) m.
� Aggressive level, desired speed and acceleration
The generations of car drivers’ aggressive level, desired speed and acceleration rate
are assumed to be the same with those of motorcyclists’.
� Desired braking deceleration
The desired braking decelerations of car drivers are estimated by using the
longitudinal headway model, drawn from normal-1(1-n, -4.8, 0.92) (Lee et al., 2007).
� Speculative preceding braking deceleration
The speculative braking deceleration from a car driver is estimated by using the
longitudinal model, drawn from min{-3.0, normal-1(1-n, -4.5, 0.52) } (Lee et al., 2007).

177
� Lateral position in a lane
The lateral clearance between two vehicles is an important factor for motorcycles’
filtering and swerving behaviour. Therefore, it is not appropriate to locate all the cars in
the same lateral position in the lanes. It is assumed that the lateral position of a car in a
lane is given following the beta distribution, i.e.
wlane/2 + [beta(3, 3) - 0.5] × (wlane - wvehicle )/2, (7.1)
where wlane and wvehicle are the widths of the lane and the vehicle respectively.
7.2.2 The environment
The spatial structure of the virtual world of this simulator is a one-way link. Such a
link consists of a traffic signal, several lanes and kerbs. The attributes of the traffic signal
include:
1) The signal cycle and the lengths for signal phases
2) The on-off status of the signal
3) The location of the signal
The lane constrains the lateral movements of passenger cars. It also affects the
generation and the lateral position of cars. The attributes of a lane include:
1) Width and length
2) Priority: The attributes such as ‘passenger cars only’ or ‘motorcycles only’ are
assigned to lanes to represent the traffic regulations.
3) Edge: The edges of the lanes are given attributes to indicate the lane discipline.
4) Kerb: The far edge of the outside lane and the near edge of the inside lane are set
to be kerbs, which cannot be crossed by any vehicles.

178
7.2.3 The interaction rules
The movements of the vehicles in this simulator are controlled by the interaction
rules, which include the rules for longitudinal following, oblique following, path choice,
gap acceptance and cooperation. These rules are detailed below:
7.2.3.1 The vehicle-following behaviour
� The car-following behaviour of a passenger car
A passenger car is assumed to interact only to the preceding vehicle in this simulator
and no lane-changing behaviour is considered. The car-following behaviour of a
passenger car is described by Gipps following model (Gipps, 1981). This model was
developed based on the principle of collision avoidance which assumed that the following
speed was constrained by two conditions: free acceleration and responding to a leading
vehicle. The inequality of free acceleration was obtained from an instrumented car in
moderate traffic (Gipps, 1981), as shown below:
n
n
n
nnnn V
tvV
tvAtvtv
)(025.0)
)(1(5.2)()( +−+≤+ ττ , where
(7.2)
An : the maximum acceleration vehicle n wishes to undertake and
Vn : the desired speed of vehicle n.
In the condition of collision avoidance, Gipps developed the inequality through the
manipulations of Newtonian equations of motion. In this model, additional time headway
of half the reaction time and a safety space margin were added in order to guarantee that
the following vehicle did not collide with the leading vehicle. The formula was given by:
]ˆ
)()())()((2[)(
21
1122
B
tvtvtxstxBBBtv n
nnnnnnnn−
−− −−−−−+≤+ ττττ , where
(7.3)

179
Bn : the desired braking deceleration of vehicle n,
B̂ : the speculative braking deceleration for the preceding vehicle,
sn : the effective length of vehicle n, i.e. the physical length and a safety margin.
Therefore, the speed of the following vehicle was constrained by Equations (7.2)
and (7.3), given by
}]ˆ)(
)())()((2[
,)(
025.0))(
1(5.2)(min{)(
21
1122
B
tvtvtxstxBBB
Vtv
Vtv
Atvtv
nnnnnnnn
n
n
n
nnnn
−−− −−−−−+
+−+=+
τττ
ττ
(7.4)
In addition, the position of vehicle n at the next time step was:
τττ ×++
+=+2
)()()()(
tvtvtxtx nn
nn
(7.5)
� The longitudinal following behaviour of a motorcycle
Gipps following model (Gipps, 1981) is adapted to describe the longitudinal
following behaviour of motorcycles. In order to depict the behaviour of motorcycle, some
revisions such as replacing the kinematic parameters (see Section 7.2.1.1) are made to
this model. In addition, the calibration results of the longitudinal headway model (see
Equations (6.1)) in Section 6.1.4.3 are integrated into the Gipps following model to depict
the following behaviour of motorcycles.
This modification is done by replacing the set-up of the safety margin, so Gipps
following model is able to describe the feature of maintaining a shorter headway when
aligning to the lateral edge of the preceding vehicle. Gipps used the value drawn from a
normal population normal(6.5,0.32) m to represent the effective length of a vehicle sn
(Equation (7.4)). This meant that the safety margin the following vehicle tended to keep,
�Dsafe, was normal(6.5- ln-1,0.32) m, where 1−nl was the length of the leading vehicle.
Here �Dsafe, is replaced by the minimum following distance of the motorcycle �Dmin. The

180
effective length of a vehicle sn is specified as:
sn=min{ Gippsn
allongitudinn ss , }
allongitudinns ~ normal(ln-1 + min
ntD∆ ,0.62) Gippsns ~ normal(6.5,0.32)
(7.6)
where minntD∆ is the minimum longitudinal following distance in Equation (6.1). The
value of the standard deviation, 0.6, is adopted from that of minD∆ in Table 6.6.
In addition, the aggressive level of motorcyclist is integrated into the random
variable 'ntu (see Equations (6.1)) to denote the inefficiency, the value of which is
calculated by normal-1(1-n; 1.79, 0.452) m when following in the left half behind the
preceding vehicle and by normal-1(1-n; 0.87, 0.392) m when following in the right half.
� The oblique following behaviour of a motorcycle
The calibration results of Equation (6.41) in Section 6.2.4.2 are integrated into the
Gipps following model to depict the oblique following behaviour of motorcycles. Similar
to the modelling of the longitudinal following behaviour of motorcycles, the effective
vehicle length sn is replaced by the longitudinal projection of the minimum oblique
following distance proposed in Equation (6.24). Thus, sn is described as:
sn=min{ Gippsn
obliquen ss , }
obliquens ~ normal(ln-1 +
min,obliquentD∆ cos(�nt) -
'ntu ,0.32)
Gippsns ~ normal(ln-1+(6.5- ln-1) cos(�nt) ,0.32)
(7.7)
where 'ntu (see Equations (6.1)) is as the inefficiency used in the longitudinal following
model. This variable introduces the aggressive level to the oblique & lateral headway
model.

181
� Comparisons of the specifications between this model and the Gipps following
model
The vehicle-following behaviour of the vehicles in this simulator is determined by a
modified Gipps following model. Based on the descriptions in this subsection and
Sections 7.2.1, the comparisons of the specifications between this model and the Gipps
following model are summarised, as shown in Table 7.1. In comparison with the original
model, this modified model has several features:
Table 7.1 Comparisons of the specifications between models The modified Gipps following model Specification Gipps
following model
Following model for
passenger cars
Longitudinal following model for motorcycles
Oblique following model for motorcycles
Desired speed Vn (m/sec)
N(20.0,3.22) Truncated-N-1(n; 13.4, 3.22, 11.2, 14.8)
Truncated-N-1(n; 13.4, 3.22, 11.2, 14.8)
Truncated-N-1(n; 13.4, 3.22, 11.2, 14.8)
Desired braking Bn (m/sec2) N(-3.4,0.62) N-1(1-n; -4.8, 0.92) N-1(1-n; -4.3, 0.52) N-1(1-n; -4.3, 0.52)
Speculative preceding braking B̂ (m/sec2)
min{-3.0, N(-3.2, 0.32)}
min{-3.0,
N-1(1-n; -4.5, 0.52)} Min{-3.0, N-1(1-n; -3.8, 0.52)} min{-3.0, N-1(1-n; -3.8, 0.52)}
Acceleration An
(m/sec2) N(1.7,0.32) N(1.7,0.32) N(1.7,0.32) N(1.7,0.32)
Reaction time � (sec) 0.67 0.75 0.75 0.75
Effective vehicle length sn (m) N(6.5,0.32) m ln +�Dsafe See Equation (7.6) see Equation (7.7)
Vehicle length ln (m) - N(4.3,0.22) 1.65 m 1.65 m
Safety margin �Dsafe (m) - N(2.5,0.32) See Equation (7.6) see Equation (7.7)
Vehicle width w (m) - N(1.6,0.052) 0.75 m 0.75 m
Lateral speed vw (m/sec) - -
Log-N-1 (n;0.88, 0.412) to left
Log-N-1 (n;0.88, 0.472) to right
Log-N-1 (n;0.88, 0.412) to left
Log-N-1 (n;0.88, 0.472) to right
Aggressive level �n - uniform(0,1) uniform(0,1) uniform(0,1)
1) Two-dimensional vehicle-following: this modified model considers the
influences of the lateral positions on the following behaviour. In order to achieve
this purpose, the modified model has more complicated specifications, including

182
the lengths, the widths and the effective lengths of vehicles (see Table 7.1).
2) Integrate the longitudinal headway model and the oblique & lateral
headway model into the safety margin of the Gipps following model: The
effective vehicle length sn in Gipps following model consists two parts: the
vehicle length ln and the safety margin �Dsafe. The modified models proposes
that the safety margin �Dsafe can be replaced by the minimum following
distances �Dmin in Equations (6.1) and (6.24), so the longitudinal headway model
and the oblique & lateral headway model developed in this study can be
integrated into the Gipps following model.
3) Introduce the aggressive level: it is assumed that the factors linked to the
aggressive driving behaviour of a driver are highly related. When these
parameters such as acceleration and braking deceleration are sampling
independently, the correlations between them cannot be presented. Thus, in the
modified Gipps model, the aggressive level of a driver is introduced and the
relevant parameters are sampled according to it.
4) Empirical parameters: the parameters used in the modified model are obtained
and calibrated from the empirical data. Gipps following model employed several
parameters, the values of which were assigned arbitrarily, as discussed in Section
3.1.1.2. The modified model in this study should be able to represent the traffic
characteristics more realistically since some of these parameters have been
calibrated.
7.2.3.2 The path choice behaviour of a motorcycle
The longitudinal following, the oblique following and the gap acceptance (see
Section 7.2.3.3) models describe the short-term plans of motorcycles, whereas the path
choice model, Equations (6.55) and (4.22), directs the mid-term manoeuvres of them.
Such mid-term plan might not change at each time step.

183
In this simulator, the mid-term plan is decided by the comparison between the
utilities of the alternatives at the current time step and the choice at the last time step. If a
motorcycle is following the same leading vehicle and the choice at the last time step still
has the largest utility at the current time step, then the choice continues, otherwise,
re-calculate the result of the random utility model according to the surrounding
environment. This process is shown in Figure 7.1.
Figure 7.1 The decision-making process of the mid-term plan
7.2.3.3 Gap acceptance
Gap acceptance behaviour is a skill for deciding whether the gap is large enough for
making a movement. For example, when a motorcyclist intends to move leftwards, he
will assess the gaps at the left hemisphere before making the movement. The motorcyclist
usually makes the gap acceptance decision according to his experience and perception. In
addition, his aggressive level may also affect his judgment. Hence, the gap acceptance
behaviour can be described by capturing the relationship between the aggressive level of
Start
Update the path choice decision Choicen,t
Let maxVn,t =max{Vl,n,t, Vc,n,t , Vr,n,t}
Choicen,t = Choicen,t-1
Is Vehiclen-1,t
= Vehiclen-1,t-1
Yes
No
Is maxVn,t = Choicen,t-1
Yes
No
t = t+1

184
the motorcyclist and his perception of the observed gap.
In Section 6.3.1.2, the interacting force has been introduced to depict the magnitude
of interaction between two vehicles. This variable serves as an index to represent the
motorcyclist’s perception of the observed gap. Since the ranges of the interaction force
and the aggressive level are both between 0 and 1, the gap acceptance behaviour of
motorcyclists can be described by comparing these two variables directly:
ntn
ntnnt force
forceY
<≥
=ωω
if 0 if 1
,
(7.8)
where Ynt is the choice indicator variable. Its value is 1 if the gap is accepted and 0
otherwise.
7.2.3.4 Cooperation between vehicles
In mixed traffic, vehicles not just react to the movements of other vehicles passively.
It is more likely to observe that a vehicle tries to change its surroundings actively. When a
vehicle imposes its will on others, a process negotiation and cooperation is involved. In
this study, two types of negotiation and cooperation processes are introduced:
� A motorcycle pulls out into a small gap
When a motorcyclist is executing a mid-term plan to make lateral movements, or he
is weaving in and out of the traffic, sometimes he is observed pulling out into a small gap
between two vehicles. This situation usually happens to an aggressive motorcycle and a
less aggressive lag vehicle. When the leg vehicle is forced to cooperate with this
motorcycle, it will anticipate the merging and react gently to the suddenly shortened
safety gap.
� A slow moving motorcycle gives way to a fast following car
When a slow moving motorcycle is progressing at the central area of a lane and is

185
blocking the course of a passenger car which wishes to move faster, the passenger car will
ask the motorcycle to give way. The negotiation result is decided by the aggressive levels
between the two vehicles involved and the traffic conditions in surroundings. The
motorcycle will agree to the request if its aggressive level is lower and it is safe to move
aside.
7.2.3.5 The decision-making process of a motorcycle
The framework of a motorcyclist’s decision-making behaviour is shown in Figure
7.2. In this framework, three types of mechanisms are integrated into this
Figure 7.2 The decision-making process of motorcyclists
Is the longitudinal gap satisfactory?
No
Yes
Oblique & lateral headway model
Cooperation process
Modified Gipps following model
Yes
No
Path choice model
Start
Is the oblique and lateral gap for the next movement
accepted? No
Yes
Make a lateral movement
Do not make lateral movement
Longitudinal headway model
Path choice Left or right
Straight
Adjust speed
Give way to the
rear vehicle?
Yes
No Pull out into a
small gap?
No Is the oblique and lateral gap for the next movement
accepted?
Yes

186
decision-making process: a) The longitudinal headway model, the oblique & lateral
headway model and the modified Gipps following model describe the collision avoidance
behaviour of motorcyclists; b) The path choice model makes mid-term plans for
motorcyclists when the longitudinal headways are not satisfactory; and c) The
cooperation process describes the cooperation between vehicles.
7.2.4 The user interface
This simulator has a graphical user interface which consists of a main window,
several control panels and observing windows, which are described below. The
screenshot of the user interface is shown in Figure 7.3.
Figure 7.3 The screenshot of the agent-based simulation system developed in this study
1) The main window: The main window visualises the spatial structure of this
simulation. The activities and interactions of the agents are displayed on the
monitor and thus their behaviour and emerging phenomena can be observed.

187
2) Control panels: The control panels are set to adjust the attributes and parameters
of the simulator.
3) Observing windows: There are a number of observing windows with the
function of collecting the information of the agents and displaying the graphs.
The time-space trajectories of vehicles are able to output to a text file. In addition,
the fundamental diagrams of the traffic flow are drawn and updated instantly in
the observing windows.
7.2.5 The schedule of activity
Scheduling is an important element of the agent-based modelling. It organises the
events and activities to happen in a time sequence. The schedule should be arranged by
the researcher according to his simulation scenario.
The simulation results shown in this study (see Sections 7.3 and 7.4) were arranged
by the schedule discussed below:
1) Simulation time: 12,000 sec.
2) Vehicle generation: The vehicles in each lane were generated by the time
headways drawn from a normal distribution, normal(2000/(200+t),0.52) sec. The
mean of this normal distribution decreased along with the simulation time, t,
following a rectangular hyperbola curve. However, when the time headways
drawn form this distribution were shorter than safety time headways, the vehicles
would be generated by safety time headways. Thus, this vehicle generation
mechanism could simulate the traffic which changed gradually from a free flow
to a congested flow. The flow would achieve the maximum flow rate at the
simulation time of around 1,800 sec.
3) Signal control: A traffic signal was scheduled to take effect at the 1,801th sec.
This traffic signal, employed for the purpose of simulating the traffic disturbance

188
downstream, was installed near the end of the link. It was designed to have three
signal displays with a cycle length of 93 sec. The length of the amber light was
set to be the first 3 sec of the red light. In order to simulate the traffic conditions
from slightly delay to the traffic gridlock, the lengths of the green and red lights
varied with the simulation time. The length the red light (including the amber)
was 0 sec initially, but would increase by 1 sec for every 200 sec. This schedule
ensured that this simulation was able to represent all kinds of flow-speed-density
compositions in the traffic.
4) Information collection: The simulation results were displayed in fundamental
diagrams (see Figure 7.9, Figure 7.11 and Figure 7.12), in which the information
was collected by two time spans. The dots in these diagrams represented the
traffic conditions collected by every 1 minute of the simulation time. The traffic
information collected by every minute could have high variation, so these dots
displayed the scattered patterns of some extremely conditions. In addition, the
curves in these diagrams displayed the trends of the traffic variables collected by
every 15 minutes. These curves were used to represent the average and general
performance of the traffic over a period of time.
7.2.6 Summary
This section described the simulator developed based on the agent-based
architecture for simulating the mixed traffic flow containing motorcycles. In this
agent-based framework, the agents carried the properties obtained from the analyses of
the field data and encapsulated certain interaction rules to control their own behaviour.
The behaviour patterns simulated in this section were based on the characteristics
analysed and the models developed in the previous chapters, including the
vehicle-following behaviour, the short-term, mid-term and long-term decision-making

189
behaviour, and the cooperation behaviour. The environment and the schedule of activity
provided the spatial and temporal contexts for these agents. The user interface enabled the
researchers to communicate with the simulator. This framework constructed a solid
structure to simulate the motorcycle behaviour. The verifications and applications of this
simulator will be introduced in the next two sections.
7.3 Verification
The aim of verification is to ensure that the simulator works as intended (Benekohal,
1991). The behaviour patterns of motorcycles and the properties of the traffic flow in this
simulation system are examined to make certain that this system is able to achieve the
objectives of this study. These are elaborated below.
7.3.1 Representation of the characteristic behaviour of motorcycles
One of the objectives of this simulator is to represent the characteristic movements
of motorcycles analysed in Section 2.1.3.1. Thus, it is critical to ensure that this simulator
is able to achieve this task. The trajectories of the vehicles produced by this simulator are
employed to examine these behaviour patterns.
Figure 7.4 shows the time-space trajectories extracted from Scenario I in Section
7.4.2. The details of the scenario settings can be found in that section. Figure 7.4a
displays the trajectories of the vehicles of the whole link, while Figure 7.4b shows only
the trajectories of the vehicles in the outer lane. The discontinuous trajectories in Figure
7.4b are caused by the lane-changing of motorcycles.
Amongst those behaviour patterns described in Section 2.1.3.1, the filtering
behaviour is the most distinctive one to present the motorcycle behaviour. Figure 7.4a
illustrates that this simulator is able to represent this behaviour pattern. In addition, it
also shows that when passenger cars are queuing behind the red light, some motorcycles

190
can percolate through the stationary vehicles and move to the head of queues. From
Figure 7.4b, some motorcycles are observed to have extremely small headways. These
observations come from the situations such as travelling alongside another vehicle in
the same lane, tailgating and oblique following. These plots reveal that this simulator
can generally represent the characteristic behaviour patterns of motorcycles.
Figure 7.4 Time-space plot of the trajectories in mixed traffic flow
Time
(m)
(sec)
Passenger car trajectory Motorcycle trajectory
Time
(m)
(sec)
(a) Trajectories from Scenario I in Section 7.4.2 (3 lanes)
Passenger car trajectory Motorcycle trajectory
(b) Trajectories from Scenario I in Section 7.4.2 (the outer lane)

191
7.3.2 The effects of the dynamic virtual lane based models
The time-space trajectories in homogeneous passenger car and motorcycle flows
are plotted in Figure 7.5. The data shown in this plot is extracted from Scenarios V and
VIII in Section 7.4.4, where the details of the scenario settings can be found. Basically,
Figure 7.5a represents the simulation outputs of the Gipps following model as this
simulator adopts the Gipps following model to direct the movements of passenger cars,
whereas Figure 7.5b represents the output of the model developed in this study (see
Table 7.1).
By comparing the three plots in Figure 7.5a, Figure 7.5b and Figure 7.4a, it is
found that the trajectories behind the red light are more chaotic when the flow contains
motorcycles, whereas the trajectories from a lane-based traffic are more orderly and tidy.
The road densities in the flow containing motorcycles are also higher. In addition, shock
waves can be observed in the flows with passenger cars, but are not obvious in the
homogeneous motorcycle flow. The speeds of shock waves shown in Figure 7.5a are
around 25 km/hr, which is a little faster than the speed of 18.34 km/hr obtained from the
empirical survey introduced in Lu and Skabardonis (2007). The reason for obtaining a
higher speed in Figure 7.5a is that it shows the trajectories of a saturated flow in which
the vehicles are generated with short time headways. Thus the accumulation of the
queues is faster.
The comparison between Figure 7.5a and Figure 7.5b shows that a lane-based
model cannot exhibit the chaotic trajectories of a non-lane-based model even though the
road has been divided into several lanes. This implies that the technique of modelling
motorcycle behaviour by dividing the lane into several fixed virtual lanes, for example,
cellular automata, could not be able to represent the behaviour of motorcycles in mixed
traffic realistically. From these comparisons, several points can be drawn:

192
Figure 7.5 Time-space plot of the trajectories in homogeneous traffic flow
1) This simulator is able to represent the traffic flow properly. The time-space plots
show that this system is able to display the queues, the queue discharge and
shock waves of the lane-based traffic flow.
2) The system is able to present more chaotic trajectories when the characteristic
behaviour patterns of motorcycles integrated in the simulator take effect.
Passenger car trajectory Motorcycle trajectory
Time
(m)
(sec)
Passenger car trajectory
(a) Trajectories from Scenario V in Section 7.4.4 (3 lanes)
Motorcycle trajectory
Time
(m)
(sec)
(b) Trajectories from Scenario VIII in Section 7.4.4 (3 lanes)

193
3) The models and framework proposed in this study are able to represent the
characteristics of a non-lane-based traffic flow.
7.3.3 The cooperation between vehicles
One of the strengths of the agent-based modelling framework is its ability to handle
the cooperation behaviour of agents. The behaviour of a motorcyclist’s weaving in and
out of traffic or merging into a small gap is an example that this simulator is able to deal
with. The trajectories in Figure 7.6 show that a motorcycle is moving laterally and leaving
the lag vehicle a small gap to deal with. This passenger car cooperates with this
aggressive merging behaviour by adjusting to this small gap gently and waiting for the
gap extending to a normal following distance. If this simulator does not have such a
cooperation mechanism, the passenger car will react to the short gap by applying severe
brakes and produce unreasonable vehicular trajectories. With this cooperation process,
the weaving behaviour of an aggressive motorcyclist can be represented.
Figure 7.6 The communication and cooperation behaviour of vehicles
7.3.4 Headway distribution
The headway distribution generated from the simulator is examined to check that
this system is able to reproduce the similar traffic environment to the survey site. The
survey site is a link with congested traffic behind a traffic signal. Two similar traffic
conditions from the simulation environment are selected. Figure 7.7a presents the
condition that motorcycles are behind the stop line at the beginning of the red light (see
t=0 sec t=2 sec t=4 sec t=6 sec t=8 sec t=10 sec t=12 sec t=14 sec t=16 sec t=18 sec
Longitudinal position (m)
(m)
Passenger car Motorcycle

194
area I in Figure 7.7c). Figure 7.7b shows the discharge of a short queue (see area II in
Figure 7.7c).
Figure 7.7 The frequency distributions of the longitudinal headways
The longitudinal headway distributions of motorcycles under both conditions
follow the lognormal distribution (p=0.209 and 0.063 respectively, K-S test, two-tailed).
The means of the headways are 11.4 m and 15.2 m; the modes of these two lognormal
distribution curves are 7.38 m and 7.62 m, respectively. These values look reasonable and
are close to the statistics measured from the field data (see Sections 6.1.2.2 and 6.1.2.3).
This shows that this simulator is able to represent properties of the traffic flow in the
survey site.
7.3.5 The fundamental diagrams of the traffic flow
The built-in observers of this simulator have the functions of collecting information
Lognormal curve Lognormal curve
(m) (m)
(a) The frequency distribution of the motorcycles’ longitudinal headway in area I
(m)
Time (sec)
I
II
(c) Indication of the investigation areas
Investigation area
(b) The frequency distribution of the motorcycles’ longitudinal headway in area II

195
about the traffic stream and then convert the information into macroscopic traffic
parameters. The fundamental diagrams generated from the simulator present the relations
between traffic flow, traffic density and speed correctly (see Figure 7.9, Figure 7.11,
Figure 7.12 and Figure 7.13). The dots and curves in these plots show reasonable
scattered patterns and proper values. For example, the maximum flow rate for a
homogeneous car flow from the simulation results is around 2,100 veh/hour/lane (see
Figure 7.13), which is slightly higher than the saturated flow rates found in other studies
(for example, Turner and Harahap, 1993; Cannell and Gardner, 1996; Hossain, 2001).
However, as the maximum flow rate shown here does not include the start and end lost
time effects in a signalised intersection, a slightly higher figure is reasonable. In addition,
the maximum speed from the simulation results is around 50 km/hr, which is the desired
speed set for the agents in this simulator. All this shows that this simulator works well to
integrate the individual information into the aggregate information.
7.4 The applications
This simulation model can be applied to a number of areas. In this section, three
applications of this simulator are presented. Section 7.4.1 describes the scenario settings
of these applications. In Sections 7.4.2 and 7.4.3, the effects of the installations of the
designated motorcycle lane and the motorcycle reservoir are evaluated respectively. In
Section 7.4.4, the Passenger Car Unit (PCU) values of motorcycles are estimated.
7.4.1 The scenario settings
In order to evaluate the above tasks, eight scenarios were created. Table 7.2
summarises the basic settings of these scenarios. Scenarios I and II were used to analyse
the influences of installing a motorcycle lane. Scenarios I to IV were employed to
evaluate the effects of the motorcycle reservoir behind the traffic signal. Scenario I and

196
Scenarios V to VIII were used to estimate the PCU values of motorcycles under different
traffic compositions. Further details of the scenario specifications will be provided in
each subsection.
Table 7.2 Specifications of the scenarios Scenario Proportion of
motorcycles Motorcycle
reservoir (depth) Motorcycle
Lane Lane widths from off-side
to near-side (m) Scenario I 25% No No 3.2, 3.2 and 3.6 Scenario II 25% No Yes 2.9, 2.9, 2.9 and 1.3 Scenario III 25% Yes (5m) No 3.2, 3.2 and 3.6 Scenario IV 25% Yes (5m) Yes 2.9, 2.9, 2.9 and 1.3 Scenario V 0% No No 3.2, 3.2 and 3.6 Scenario VI 50% No No 3.2, 3.2 and 3.6 Scenario VII 75% No No 3.2, 3.2 and 3.6 Scenario VIII 100% No No 3.2, 3.2 and 3.6
7.4.2 The effects of the installation of a motorcycle lane
Motorcycle lane refers to a special lane which gives priority to small vehicles such
as motorcycles and bicycles. The installation of motorcycle lanes is common in some
Asian countries such as Taiwan and Malaysia. Recently, the UK government also started
to evaluate the possibility of allowing motorcycles for using the bus lanes (DfT, 2005a).
The installation of motorcycle lanes is believed to be able to reduce the heterogeneity of
the traffic and improve the road safety. However, besides the safety issues, the influences
of motorcycles lanes on the road capacity is an important topic to be studied.
Scenarios I and II were used to assess the effects of the installation of a motorcycle
lane. In Scenario I, a one-way link which was 300 m long and 10 m wide was established
in the simulator. This link consisted of three lanes. The widths of these lanes from the fast
lane to the slow lane were 3.2 m, 3.2 m and 3.6 m. In order to simulate the congested flow,
a traffic signal was added near the end of the link (Figure 7.8a).
In Scenario II, an alternative layout plan was applied to the simulation model. Each
lane in the original layout was diminished to 2.9 m in width to give a space of 1.3 m in

197
width for the designated motorcycle lane (Figure 7.8b). Therefore, in the new layout only
the widths of the lanes were altered. The number of lanes for cars and the width of the
road remained the same.
Figure 7.8 The schematic diagrams of the simulation scenarios for motorcycle lanes
The events and activities in both scenarios were scheduled as described in Section
7.2.5. After simulating the mixed traffic flow under both scenarios, the fundamental
diagrams were generated for analysing the impacts of the motorcycle lane. The
diagrams of both scenarios are plotted in Figure 7.9. The dots in these diagrams
represented the traffic conditions collected by every 1 minute of the simulation time,
whereas the curves displayed the trends of the traffic variables collected by every 15
minutes. Several points are concluded from the outputs of this simulation:
1) The maximum flow rate and the critical traffic density increase. In this case,
by installing a motorcycle lane, the maximum flow rate increases by around 20%
because of the additional capacity of the motorcycle lane. The flow rate also
increases under the circumstances of congested flow.
2) The space mean speeds increase. Given the same traffic density in congested
conditions, the space mean speed of the flow is higher when the motorcycle lane
is installed.
(a) Scenario I- without a motorcycle lane
(b) Scenario II- with a motorcycle lane 290 m 10 m
1.3 m
2.9 m 2.9 m
Signal
2.9 m Motorcycle only
290 m 10 m
3.6 m
3.2 m
3.2 m
Signal

198
The simulation results imply that when the proportion of motorcycles is high, the
installation of a motorcycle lane is necessary. It is an efficient and economic way to
reduce the heterogeneity of the mixed traffic and increase the road capacity.
Figure 7.9 The comparison of the fundamental diagrams between with and without the installation of a motorcycle lane
(km/hr)
(veh/km)
(veh/hr) (km/hr)
(veh/km)
(b) Scenario II- with a motorcycle lane
(a) Scenario I- without a motorcycle lane
(veh/km) 200 400 600
50
100
200 400 600
5,000
10,000
(veh/hr) 5,000 10,000
50
100
(veh/km)
(km/hr)
200 400 600
50
100 (veh/hr)
200 400 600
5,000
10,000
(veh/hr)
(km/hr)
5,000 10,000
50
100
(veh/km)
(c) Comparison between two scenarios
(veh/km)
(km/hr)
200 400 600
50
100 (veh/hr)
200 400 600
5,000
10,000
(veh/hr)
(km/hr)
5,000 10,000
50
100
Scenario I- without a motorcycle lane
Scenario II- with a motorcycle lane

199
7.4.3 The effects of the installation of an advanced stop line
The advanced stop line refers to an additional stop line for double-track vehicles
situated a few metres back from the primary stop line. These two stop lines constitute a
reservoir area for waiting single-track vehicles to occupy. In some European countries
such as the UK and the Netherlands, advanced stop lines are introduced to reduce conflict
between cyclists and motorists at signalised junctions (Cycling England, 2007). In Asian
countries such as Taiwan, motorcycles are allowed to access the reservoir areas and enjoy
a short start-up time to pass the intersection. It is believed that the motorcycle reservoir at
the front of a queue can increase the capacity of the road, as May and Montgomery (1986)
have reported that the motorcycles leaving the intersection with the first 6 sec of the green
time will not affect the capacity of the intersection. Recently the UK government started
to evaluate the possibility of allowing motorcycles into advance stop lines (DfT, 2005a).
This simulator is able to assess this issue from the viewpoint of traffic flow control.
Scenarios I to IV were employed to assess the effects of the motorcycle reservoir.
The specification details of Scenarios I and II have been described in Section 7.4.2. The
settings of Scenarios III and IV were identical to Scenarios I and II respectively, except
the advanced stop lines, as shown in Figure 7.10. The depth of the motorcycle reservoirs
were 5 metres.
After simulating these scenarios according to the schedule described in Section
7.2.5, the fundamental diagrams were employed to analyse the impacts of the
motorcycle reservoir. The diagrams of Scenarios I and II are plotted in Figure 7.9 and
those of Scenarios III and IV are shown in Figure 7.11. The dots in these diagrams
represented the traffic conditions collected by every 1 minute of the simulation time,
whereas the curves displayed the trends of the traffic variables collected by every 15
minutes.

200
Figure 7.10 The schematic diagrams of the simulation scenarios for advanced stop lines
The advanced stop line does not influence the flow as the traffic signal does not take
effect. However, it starts to influence the flow when the signal works. From the
simulation results, several points are concluded from the outputs of this simulation:
1) The advanced stop lines increase the flow rate in congested situations. The
motorcycle reservoirs allow the vehicles to reorganise their locations during the
red periods, so the mixed traffic become less heterogeneous. Under the
conditions of the same flow speeds (speed-flow diagram in Figure 7.11c), the
flow rate increase after the installation of the advanced stop lines. This is caused
by the more organised traffic and the phenomenon that motorcycles leaving the
intersection with the first 6 sec of the green time would have a PCU equivalent of
0 (May and Montgomery, 1986).
2) The advanced stop lines decrease the density of the flow in congested
situations. The motorcycle reservoirs take up some road spaces. Under the
conditions of the same flow speeds (speed-density diagram in Figure 7.11c), the
flow densities drop after the installation of the advanced stop lines due to the fact
that the motorcycle reservoirs sometimes cannot be used efficiently.
(a) Scenario III- with a motorcycle reservoir but without a motorcycle lane
(b) Scenario IV- with a motorcycle lane and a motorcycle reservoir
1.3 m
2.9 m 2.9 m
Signal
2.9 m Motorcycle only
3.6 m
3.2 m
3.2 m
Signal
285 m 10 m 5 m
285 m 10 m 5 m

201
Figure 7.11 The comparison of the fundamental diagrams between with and without the
motorcycle reservoir
3) The advanced stop line does not affect the flow-density pattern significantly.
As shown in the flow-density diagram of Figure 7.11c, the flow-density patterns,
both for the situations of with and without a motorcycle lane, do not show
significant differences after the advanced stop lines have installed. Given the
same flow rate, the installation of advanced stop lines actually changes only the
(c) Comparison between the scenarios
(a) Scenario III- with a motorcycle reservoir but without a motorcycle lane
(b) Scenario IV- with a motorcycle reservoir and a motorcycle lane
(veh/km)
(km/hr)
200 400 600
50
100 (veh/hr)
200 400 600
5,000
10,000
(veh/hr)
(km/hr)
5,000 10,000
50
100
(veh/km)
(veh/km)
(km/hr)
200 400 600
50
100 (veh/hr)
200 400 600
5,000
10,000
(veh/hr)
(km/hr)
5,000 10,000
50
100
(veh/km)
(veh/km)
(km/hr)
200 400 600
50
100 (veh/hr)
200 400 600
5,000
10,000
(veh/hr)
(km/hr)
5,000 10,000
50
100 Scenario I Scenario II Scenario III Scenario IV

202
scatterd patterns of motorcycles during the red periods, but do not change the
flow density.
7.4.4 The PCU values of motorcycles
In Section 2.2, it has been discussed that motorcycles can exploit the road space
which is usually unusable for passenger cars. As the number of motorcycles increases, the
road space can be used more efficiently and thoroughly. From this viewpoint, the
presence of motorcycles can add the capacity of a road. Thus, the PCU (Passenger Car
Unit) equivalent of motorcycles is likely to decrease as their number on roads increases.
In addition, when the movements of passenger cars are constrained due to high traffic
density, motorcycles are still able to progress by filtering. Hence, the PCU equivalent of
motorcycles would be lower when the traffic congestion is severer. Based on the above
discussions, it is hypothesised that the PCU equivalents of motorcycles vary with
different vehicle compositions and traffic speeds. This simulator was employed to
investigate these hypotheses and to estimate the PCU values of motorcycles.
Scenarios I and V to VIII were employed to estimate the PCU values of motorcycles
under different traffic compositions. The settings of Scenarios V to VIII were identical to
Scenarios I, except the proportions of motorcycles generated. Motorcycles accounted for
25% of the traffic flow in Scenario I, and 0%, 50%, 75% and 100% in Scenarios V to VIII
respectively. The simulation results are represented by using the speed-flow and
flow-density fundamental diagrams, as shown in Figure 7.12 and Figure 7.13. The dots in
these diagrams represented the traffic conditions collected by every 1 minute of the
simulation time, whereas the curves displayed the trends of the traffic variables collected
by every 15 minutes.

203
Figure 7.12 The fundamental diagrams under different traffic compositions
(veh/km)
(km/hr)
200 400 600 800
50
100
(veh/hr)
200 400 600 800
5,000
10,000
(veh/hr)
(km/hr)
5,000 10,000 15,000
50
100 15,000
(veh/km)
(a) Scenario VIII- 100% motorcycle flow
(veh/km)
(km/hr)
200 400 600 800
50
100
(veh/hr)
200 400 600 800
5,000
10,000
(veh/hr)
(km/hr)
5,000 10,000 15,000
50
100 15,000
(veh/km)
(b) Scenario VII- 75% motorcycle flow
(veh/km)
(km/hr)
200 400 600 800
50
100
(veh/hr)
200 400 600 800
5,000
10,000
(veh/hr)
(km/hr)
5,000 10,000 15,000
50
100 15,000
(veh/km)
(c) Scenario VI- 50% motorcycle flow
(veh/km)
(km/hr)
200 400 600 800
50
100
(veh/hr)
200 400 600 800
5,000
10,000
(veh/hr)
(km/hr)
5,000 10,000 15,000
50
100 15,000
(veh/km)
(d) Scenario I- 25% motorcycle flow
(veh/km)
(km/hr)
200 400 600 800
50
100
(veh/hr)
200 400 600 800
5,000
10,000
(veh/hr)
(km/hr)
5,000 10,000 15,000
50
100 15,000
(veh/km)
(e) Scenario V- 100% passenger car flow

204
Figure 7.13 The comparison of flow-density relations under different traffic compositions
Figure 7.14 The flow rates and PCU values from the simulation results
The PCU equivalents were estimated by using the Webster’s method (Kimber et al.,
1985), in which variation of the saturated flow rates caused by the presence of
motorcycles were calculated so the impact of motorcycles on the capacity of the flow
could be estimated. In this study, the PCU values under the maximum critical density and
different space mean speeds (see Figure 7.14) were obtained. From the simulation results,
several points are concluded and discussed:
1) The presence of motorcycles enlarges the capacity of the road. From the
density-flow relations, it is found that the maximum flow rate increases
( ) * * *
+ ) * * *
, ) * * *
- ) * * *
. . ) * * *
* / 0 + / + * / , + / . * * /
Critical densitySpeed=10 km/hrSpeed=20 km/hrSpeed=30 km/hrSpeed=40 km/hr 1 2 1 1
1 2 3 11 2 4 11 2 5 11 2 6 11 2 7 11 2 8 11 2 9 11 2 : 11 2 ; 1
4 7 < 7 1 < 9 7 < 3 1 1 <
Critical densitySpeed=10 km/hrSpeed=20 km/hrSpeed=30 km/hrSpeed=40 km/hr
Proportion of motorcycles Proportion of motorcycles
(a) Flow rates of the traffic (b) PCU values of motorcycles
(veh/hr)
10,000 5,000 (veh/km)
(km/hr)
(veh/hr)
100
50
(veh/hr)
10,000
5,000
200 400 600
Scenario VIII: 100% motorcycle flow
Scenario VII: 75% motorcycle flow
Scenario VI: 50% motorcycle flow
Scenario I: 25% motorcycle flow
Scenario V: 100% passenger car flow

205
following the raise of the proportion of motorcycles (Figure 7.14a). This effect is
generally attributed to motorcycles’ characteristic behaviour patterns, which
facilitate motorcycles to make most use of the road space. This result also shows
that motorcycles have advantages over other transport modes in congested urban
networks.
2) The PCU values of motorcycles vary with the congestion level. From Figure
7.14b, it is found that motorcycles have advantages in congested urban networks.
Their PCU values are higher when the congestion is severer. When the flow
speed is 10 km/hr, the PCU values are around 0.4. However, when the speed of
the flow is lager than 20 km/hr as the PCU values are above 0.5.
3) The PCU values for motorcycles are higher than 0.5 in free flow or minor
congested flow. Usually the figure of motorcycles’ PCU used in transport
management is 0.5, but the PCU values obtained from this simulation are higher
in free flow or minir congested flow. This implies that after considering the
safety margins, a motorcycle would take up more than half the road space a car
needs in free flow, particularly under the conditions that the effects of filtering
and other characteristic behaviour are not significant.
4) It is not clear whether the proportion of motorcycles affect their PCU values.
The values of the PCU for motorcycles vary with their advantages over
passenger cars, i.e. filtering ability, etc. Such advantages do not increase along
with the rising of the proportion of motorcycles. However, high proportion of
motorcycles increases their chance of sharing the roadspace, which is also also
affected by the vehicle scattered patterns from upstream. The settings of these
simulation scenarios cannot represent the effects of these factors.
5) The vehicle generation methods could affect the PCU values estimated. In
order to control the proportion of motorcycles, the vehicles were generated

206
randomly by the ratios of passenger cars to motorcycles in each lane. Such a
lane-based vehicle generation method is not realistic, i.e. the scattered pattern of
motorcycles cannot reflect their advantage of sharing the road spaces. This
vehicle generation setup could cause higher PCUs for motorcycles.
It is worthwhile to point out that the installation of a motorcycle lane would affect
the PCUs of motorcycles significantly. However, as motorcycles can progress through
traffic congestion by using the motorcycle lane, the proportion of motorcycles in
simulation system is not fixed, so this issue cannot be accommodated within the
framework of this analysis. In addition, the traffic in the motorcycle lane is a
homogeneous flow, which should be analysed independently from the mixed traffic flow.
Another point should be noted is that from the above analyses, it seems that when
simulating a mixed traffic flow, the proportion of motorcycles is more likely to be a
dependent variable, rather than a fixed variable. This would be useful information for
further studies on this topic.
7.5 Summary
This chapter presented an agent-based traffic simulator which was built based on
the mathematical models developed in the previous chapters. Through the verification
process, this simulation system demonstrated that it was able to work as intended and
represent the characteristic behaviour patterns of motorcycles. In addition, the three
applications presented at the end of this chapter offered useful information for traffic
engineers. All this shows that this simulator was able to carry out policy tests and was a
powerful tool for conducting a study on mixed traffic flow containing motorcycles.

207
8 Conclusions and Recommendations for Further Work
This chapter begins by summarising the research according to the objectives
mentioned in Chapter 1. Then the fields for further research are discussed in the second
part.
8.1 Summary of research
In Chapter 1, the objectives of this study have been stated. These objectives are then
successfully addressed in Chapters 2 to 7. In this section, the objectives are restated and
the relevant findings are summarised.
� Characterise motorcycle behaviour patterns
1) Nine behaviour patterns describing the unique movements of motorcycles
were characterised by summarising the findings from literature and the
observations of this study. Some of these behaviour patterns have never been
pointed out by other studies. These behaviour patterns should not be neglected
when developing models to describe the mixed traffic flow since they affected
the mixed traffic flow significantly.
2) The differences between motorcycles and passenger cars were analyses. It
was believed that the characteristic behaviour of motorcycle originated from
these differences. Therefore, a systematic analysis was conducted from the
physical, psychological and mechanical viewpoints. This comprehensive
analysis integrated the information from the literature and prepared the ground
for the subsequent motorcycle behaviour research.
3) Extracted the key elements of motorcycle behaviour: According to the
assumption of complexity theory, the simple rules can result in complex

208
behaviour. Therefore, it was suggested that the motorcycle behaviour could be
described by modelling some key elements. After analysing the behaviour
patterns of motorcycles, these key elements were recognised and extracted.
Three models were then proposed to describe these basic elements, namely the
longitudinal headway model, the oblique & lateral headway model and the path
choice model. These analyses laid the base for the development of the
agent-based model. It has been proven in Chapter 7 that by capturing these
fundamental elements, a simulation model could represent the characteristic
properties of mixed traffic containing motorcycles.
� Identified the gaps and weaknesses in current microscopic treatments for simulating motorcycles in traffic flow
4) The limitation of the lane-based models: The conventional car-following and
lane-changing models are developed based on the assumption of lane-based flow.
These lane-based models cannot describe the characteristic behaviour patterns of
motorcycles properly because they do not consider the interactions between the
lateral positions and the longitudinal movements. In addition, the lateral position
of the motorcycle is more likely to be a continuous variable rather than a discrete
variable. For the same reason, the cellular automata model is not suitable for
describing mixed traffic containing motorcycles.
5) The availability of the data: It is found that a lack of proper field data has
constrained the study of motorcycle behaviour. To obtain a data set of
motorcycles’ two-dimensional trajectories is crucial for a microscopic
investigation because the lateral movements within a lane cannot be neglected.
Therefore, to obtain trajectory data for motorcycles is the key to the success of
the studies on this topic. In order to tackle this issue, a data collection system
capable of providing the data for motorcycle studies was then developed, as

209
described in Chapter 5.
6) Dealing with the effects of the lateral position: It is found that the techniques to
describe the lateral movements of motorcycles are just at the preliminary stage.
The modelling of the longitudinal following behaviour of motorcycles is
complicated because it has to consider the effects of the lateral position. In
addition, the dynamic virtual lane-based nature of motorcycles is a significant
characteristic which will affect their lateral movements. To tackle the interaction
between the lateral positions and the longitudinal movements is the major
limitation of the conventional models for vehicular movements. This is the main
challenge in the modelling of motorcycle behaviour.
� Developed models to describe the characteristic behaviour of motorcycles
Based on the analyses in Chapter 2, three models were developed to describe
motorcycle movements. The features and the calibrations of these models are
summarised as following:
7) The longitudinal headway model focused on describing the phenomenon that a
motorcycle will maintain a shorter headway when aligning to the edge of the
preceding vehicle. This behaviour pattern was an important characteristic of
motorcycles’ movements. It affected the longitudinal following behaviour, the
overtaking behaviour and the swerving behaviour significantly. By capturing this
feature, the behaviour of motorcycle could be described more accurately.
8) The oblique & lateral headway model described the headway distribution
pattern of motorcycles when they were following the preceding vehicles
obliquely (or laterally). The headway was modelled in a two-dimensional
manner to depict the interaction between the longitudinal movements and lateral
movements of motorcycles.
9) The path choice behaviour was modelled by using a multinomial logit model.

210
The path referred to the dynamic virtual lane which was defined by the vehicles
around the subject motorcycle. The concept of dynamic virtual lane-based
movement was the most important factor to characterise the difference to the
lane-based models.
10) Filling the gaps: These models successfully dealt with the critical limitations
found in the literature, for example, to describe the interaction between the
longitudinal following distance and the lateral position, and the dynamic virtual
lane-based movements.
11) The data for calibrating the above three models were collected by using the
video recording methods. A computer programme was developed to extract the
vehicular trajectories from the video footage. This data extracting system was
capable of producing highly accurate data. By controlling the errors caused by
perspective and occlusion in images carefully, the database generated from this
system was able to achieve higher accuracy than other data sets surveyed by
similar methods. The database built could generate a wide variety of traffic
parameters. It has been proven in Chapter 6 that this database was able to
support the motorcycle movement study and provided the information
objectively and flexibly.
12) The calibrations: The longitudinal headway model and the oblique & lateral
headway model were calibrated by using the Bayesian analysis. The main
reason for employing the Bayesian approach was that the error terms of the
longitudinal and oblique (or lateral) headways were not normally distributed.
The Bayesian approach is a powerful tool for dealing with the non-normally
distributed error terms. The calibration results showed that the longitudinal
headway model and the oblique & lateral headway model fitted the field data
well. The multinomial logit modelling was employed to describe the path choice

211
behaviour of motorcycles. After the model refinement process, it was found that
factors that affected the path choice behaviour were the speed of the vehicle
ahead or at the oblique front, the size of the preceding vehicle, the widths of the
virtual lanes, the interacting forces at the oblique rear, and the choice of the last
time step.
� Developed a traffic simulation system capable of representing the motorcycle behaviour
13) An agent-based traffic simulator was built to represent the motorcycle
behaviour in mixed traffic flow. This simulator was developed by using the Java
language, which was a powerful tool for developing an agent-based computer
simulation programme. The mathematical models developed for describing the
motorcycle behaviour were applied to this computer programme. This
simulation system was able to work as intended and represent the characteristic
behaviour patterns of motorcycles.
14) Three applications of this simulator were presented to show that this
simulator was able to carry out policy tests and was a powerful tool for
conducting a study on mixed traffic flow containing motorcycles.
8.2 Recommendations for further work
This research demonstrates the capability of an agent-based approach to model the
motorcycle behaviour in mixed traffic flow. However, a number of directions for further
research are found:
� Factors contributing to the characteristic behaviour of motorcycles
In Chapter 2, the essential differences between motorcycles and passenger cars have
been analysed. Some strong and intuitive assumptions were also made to link these

212
differences to the characteristic behaviour patterns of motorcycles. However, little
research has been conducted to support these assumptions. It is worthwhile to investigate
a number of issues on this topic. For example, how the manoeuvring system and the field
of view affect the reaction time of a motorcyclist; how the field of view affects the safety
margin that a motorcyclist maintains; how the size and the weight of a motorcycle affect
the accelerating and decelerating behaviour of its rider, etc. These issues are highly
relevant to the field of motorcycling safety studies, but have been neglected.
� Data collection
The data obtained from video footage contain systematic errors related to
perspective. The factors such as the pixel resolution, manual operation and the height of
objects will cause errors which correlate with the longitudinal distance. This leads to
non-constant standard deviation of errors. This study has tried to describe such systematic
errors in the model by using Bayesian analysis, which is a flexible approach to dealing
with non-constant error variances. However, the model proposed did not depict the
systematic errors successfully. It would be worthwhile to further investigate how this type
of error affects the accuracy of the data and take measures to remove or allow for these
errors. Further, extracting data from video footage is an extremely labour-intensive
process. Improvements on the data extracting techniques would facilitate the studies of
motorcycle movements.
� Modelling
The proposed models could be improved from the following aspects:
1) The lateral speed in the longitudinal headway model was supposed to be a
constant (Equation (4.5)). However, this variable could vary with the vehicle
speed, the turning angle and the braking deceleration.
2) The calibration results of the oblique & lateral headway model showed that the

213
locus of the modes would be a straight line (Figure 6.7 and Section 6.2.4.3).
However, this locus could be a curve in the real world.
3) This study assumed that the longitudinal following behaviour and the oblique
following behaviour were working independently. There was no interaction
between the two models. Therefore, when a motorcycle moved from one regime
to the other, its interaction to the preceding vehicle did not change smoothly and
continuously. How the motorcyclists react when they are shifting between the
regimes of longitudinal following and oblique following should be further
investigated.
4) How the car drivers react to the presence of motorcycles should be studied and
modelled. In addition, the lane-changing movements of passenger cars should be
added into this simulator. Also, other vehicle types to this model should be
introduced into this model.
5) This study integrated the headway models into the Gipps following model to
describe the vehicle-following behaviour of motorcycles. It would also be
possible to integrate these headway models into a psychophysical model and
make a comparison between these two procedures.
� Verification and validation
There are currently no measures to verify and validate the model describing
motorcycle movements at the microscopic scale. The two-dimensional trajectories of
motorcycles cause the major difficulty of this task. A little change of the lateral position
will affect the longitudinal headway significantly. Therefore, the interaction between the
longitudinal movement and the lateral movement makes it difficult to verify and validate
the model at the microscopic level. In order to ensure that the simulation system works as
intended, a systematic approach to verify and validate the model for describing
motorcycle behaviour should be developed.

214
References
Ahmed, K. I. 1999, Modeling drivers' acceleration and lane changing behavior, PhD dissertation, Massachusetts Institute of Technology, USA.
Ahuja, S. 2001, "Simulation of driver behaviour in heterogeneous untidy traffic in developing countries", Proceedings of Symposium on Advanced Vehicle Technologies, The International Mechanical Engineering Congress and Exposition, New York, USA.
Aigner, D., Lovell, C. A. K. & Schmidt, P. 1977, "Formulation and estimation of stochastic frontier production function models", Journal of Econometrics, vol. 6, no. 1, pp. 21-37.
Anderson, P. 1999, "Complexity theory and organization science", Organization Science, vol. 10, pp. 216-232.
Antonini, G., Bierlaire, M. & Weber, M. 2006, "Discrete choice models of pedestrian walking behavior", Transportation Research Part B: Methodological, vol. 40, no. 8, pp. 667-687.
Arasan, V. T. & Koshy, R. Z. 2003, "Headway distribution of heterogeneous traffic on urban arterials", Journal of the Institution of Engineers(India), Part CV, Civil
Engineering Division, vol. 84, no. 3, pp. 210-215.
Bar-Yam, Y. 1997, "Overview: the dynamics of complex system- examples, questions, methods and concepts", in Dynamics of complex systems, Perseus Books.
Barceló, J. 2001, "Microscopic traffic simulation: a tool for the analysis and assessment of ITS systems", Highway Capacity Committee, Half Year Meeting, Lake Tahoe, USA, retrieved on 29th Dec 2006 at www. aimsun.com/ site/ content/ view/38/3/.
Bazzan, A. L. C., Wahle, J. & Klügl, F. 1999, "Agents in traffic modelling- from reactive to social behaviour", in KI-99: Advances in Artificial Intelligence, Springer, Berlin, pp. 303-306.
Ben-Akiva, M. & Lerman, S. R. 1985a, "Multinomial choice", in Discrete choice analysis:
theory and application to travel demand, MIT Press, Cambridge, Massachusetts, pp. 100-130.
Ben-Akiva, M. & Lerman, S. R. 1985b, "Tests and practical issues in developing discrete choice models", in Discrete choice analysis: theory and application to travel demand, MIT Press, Cambridge, Massachusetts, pp. 154-216.
Benekohal, R. F. 1991, "Procedure for Validation of Microscopic Traffic Flow Simulation Models", Transportation Research Record, vol. 1320, pp. 190-202.
Bierlaire, M. 2003, "BIOGEME: A free package for the estimation of discrete choice

215
models", Proceedings of the 3rd Swiss Transportation Research Conference, Ascona, Switzerland.
Bierlaire, M. 2005, "An introduction to BIOGEME Version 1.4", retrieve on 3rd May 2006 at www. biogeme.epfl.ch.
Biokinetics and Associates Ltd 2003, Review of motorcycle brake standards, R03-07, retrieved on 25th Oct. 2006 at www. unece.org/ trans/doc/ 2004/wp29grrf/ GTRBR-2004-01-04e.pdf.
Bloomberg, L. & Dale, J. 2000, "A comparison of VISSIM and CORSIM traffic simulation models on a congested network", Transportation Research Record, vol. 1727, pp. 52-60.
Blue, V. J. & Adler, J. L. 2001, "Cellular automata microsimulation for modeling bi-directional pedestrian walkways", Transportation Research Part B:
Methodological, vol. 35, no. 3, pp. 293-312.
Bohannon, R. W. 1997, "Comfortable and maximum walking speed of adults aged 20-79 years: reference values and determinants", Age and Ageing, vol. 26, no. 1, pp. 15-19.
Bonneson, J. A. & Fitts, J. W. 1995, "Traffic data collection using video-based systems", Transportation Research Record, vol. 1477, pp. 31-40.
Brackstone, M. & McDonald, M. 1999, "Car-following: a historical review", Transportation Research Part F: Traffic Psychology and Behaviour, vol. 2, no. 4, pp. 181-196.
Brackstone, M., Sultan, B. & McDonald, M. 2002, "Motorway driver behaviour: studies on car following", Transportation Research Part F: Traffic Psychology and Behaviour, vol. 5, no. 1, pp. 31-46.
Branston, D. 1977, "Some factors affecting the capacity of a motorway", Traffic
engineering and control, vol. 18, no. 6, pp. 304-307.
Brockfeld, E., Kuhne, R. D. & Wagner, P. 2004, "Calibration and validation of microscopic traffic flow models", Transportation Research Record, vol. 1876, pp. 62-70.
Brooks, S. P. & Gelman, A. 1998, "General methods for monitoring convergence of iterative simulations", Journal of Computational and Graphical Statistics, vol. 7, no. 4, pp. 434-455.
Cameron, G. D. B. & Duncan, G. I. D. 1996, "PARAMICS- parallel microscopic simulation of road traffic", Journal of Supercomputing, vol. 10, no. 1, pp. 25-53.
Cannell, A. & Gardner, G. 1996, The use of traffic signals in developing cities, ODA R6016, Transport Research Laboratory, Crowthorne, UK.

216
Cassidy, M. J. 1995, "Unsignalized intersection capacity and level of service: revisiting a critical gap", Transportation Research Record, vol. 1484, pp. 16-23.
CEPD 2006, Urban and regional development statistics, Council for Economic Planning and Development, Taiwan, retrieved on 23rd May 2007 at www. cepd.gov.tw/ upload/ URBA/ Statistic/ Urds/ 95URDS@ 990105. 0613890452@. pdf.
Chandler, R. E., Herman, R. & Montroll, E. W. 1958, "Traffic dynamics: studies in car following", Operations Research, vol. 6, no. 2, pp. 165-184.
Chandra, S. & Kumar, U. 2003, "Effect of lane width on capacity under mixed traffic conditions in India", Journal of Transportation Engineering, vol. 129, no. 2, pp. 155-160.
Cho, H.-J. & Wu, Y.-T. 2004, "Modeling and simulation of motorcycle traffic flow", IEEE International Conference on Systems, Man and Cybernetics, pp. 6262-6267.
Cowles, M. K. 2004, "Review of WinBUGS 1.4", The American statistician, vol. 58, no. 4, p. 330.
Cycling England 2007, Design portfolio: advanced stop lines, retrieved on 20th Dec 2007 at www.cyclingengland.co.uk/ documents/ A.09.pdf.
d'Inverno, M. & Luck, M. 2001, "The agent landscape", in Understanding Agent Systems, Springer, London, pp. 1-13.
Daganzo, C. F. 1981, "Estimation of gap acceptance parameters within and across the population from direct roadside observation", Transportation Research Part B:
Methodological, vol. 15B, no. 1, pp. 1-15.
De Rome, L., Stanford, G. & Wood, B. 2002, MCC survey of motorcyclists, 2001, Motorcycle Council of NSW, Inc., NSW, Australia.
DETR 1998, A new deal for transport: better for everyone- the Government's white paper
on the future of transport., Department of the Environment, Transport and the Regions, London, UK.
DfT 2004, Motorcycles and congestion: the effect of modal split, Department for Transport, London, UK, retrieved on 9th August 2007 at www. dft.gov.uk/ pgr/ regional/ policy/ motorcycles/.
DfT 2005a, The Government's motorcycling strategy, Department for Transport, London, UK.
DfT 2005b, Transport statistics bulletin: vehicle speeds in Great Britain, Department for Transport, London, UK.
Drew, D. R., LaMotte, L. R., Buhr, J. H. & Wattleworth, J. A. 1967, "Gap acceptance in the freeway merging process", Highway Research Record, vol. 208, pp. 1-36.

217
Dugdale, Julie (n.d.), "An evaluation of seven software simulation tools for use in the social sciences", In the COSI (Complexity in Social Science) project. retrieved 10th November, 2004, from www.irit.fr/ COSI/training/index.php.
Dussutour, A., Fourcassie, V., Helbing, D. & Deneubourg, J. L. 2004, "Optimal traffic organization in ants under crowded conditions", Nature, vol. 428, no. 6978, pp. 70-73.
Ecker, H., Wassermann, J., Hauer, G., Ruspekhofer, R. & Grill, M. 2001, "Braking deceleration of motorcycle riders", International Motorcycle Safety Conference, Orlando, Florida, USA.
EEA 2001, Indicator: Access to transport services (2001), European Environment Agency, retrieved on 8th August 2007 at themes.eea.europa.eu/ Sectors_and_activities/ transport/ indicators/ spatial/ TERM16,2001/.
EEA 2003, Indicator: Passenger transport demand by mode and purpose (2003.10), European Environment Agency, retrieved on 8th August 2007 at themes.eea.europa.eu/ Sectors_and_activities/ transport/ indicators/ demand/ TERM12,2003.10/.
El Hadouaj, S., Drogoul, A. & Espie, S. 2000, "How to combine reactivity and anticipation: the case of conflicts resolution in a simulated road traffic", S. Moss & P. Davidsson, eds., Proceedings of the second international workshop on Multi-Agent Based Simulation, MABS 2000, Boston, pp. 82-96.
Elliott, M. A., Baughan, C. J., Broughton, J., Chinn, B., Grayson, G. B., Knowles, J., Smith, L. R. & Simpson, H. 2003, Motorcycle safety: a scoping study, TRL581, TRL Limited, Crowthorne.
Epstein, J. M. 1999, "Agent-based computational models and generative social science", Complexity, vol. 4, no. 5, pp. 41-60.
Fasakin, J. O. 2002, "Daily cost considerations in the operations of commercial motorcycles in Nigeria: a locational analysis for Akure township", Transportation
Research Part A: Policy and Practice, vol. 36, no. 3, pp. 189-202.
Fellendorf, M. & Vortisch, P. 2001, "Validation of the microscopic traffic flow model VISSIM in different real-world situations", Transportation Research Board 80th Annual Meeting, Washington, DC, USA.
FHWA 1996, CORSIM user manual version 1.01, FHWA, USA. retrieved on 17th November, 2004 at www. itsdocs.fhwa.dot.gov/JPODOCS/ REPTS_TE/ 4Y001!.PDF.
Foucart, L. 2001, "A Small Multi Agent Systems Review", In the COSI (Complexity in Social Science) project. retrieved on 10th November 2004 from www. irit.fr/ COSI/ training/ index.php.
Franklin, S. & Graesser, A. 1997, "Is it an agent, or just a program?: a taxonomy for

218
autonomous agents", in Intelligent Agents III: Agent Theories, Architectures, and
Languages, J. P. Müller, M. J. Wooldridge & N. R. Jennings, eds., Springer, London, pp. 21-35.
Fritzsche, H.-T. 1994, "A model for traffic simulation", Traffic engineering and control, vol. 35, no. 5, pp. 317-321.
Gazis, D. C., Herman, R. & Potts, R. B. 1959, "Car-following theory of steady-state traffic flow", Operations Research, vol. 7, no. 4, pp. 499-505.
Gazis, D. C., Herman, R. & Rothery, R. W. 1961, "Nonlinear follow-the-leader model of traffic flow", Operations Research, vol. 9, no. 4, pp. 545-567.
Gelman, A. & Rubin, D. B. 1992, "Inference from iterative simulation using multiple sequences", Statistical science, vol. 7, no. 4, pp. 457-472.
Geman, S. & Geman, D. 1984, "Stochastic relaxation, Gibbs distributions, and the Bayesian restoration of images", IEEE Transactions on Pattern Analysis and Machine
Intelligence, vol. 6, pp. 721-741.
Gipps, P. G. 1981, "A behavioural car-following model for computer simulation", Transportation Research Part B: Methodological, vol. 15, no. 2, pp. 105-111.
Gipps, P. G. 1986a, "A model for the structure of lane-changing decisions", Transportation Research Part B: Methodological, vol. 20, no. 5, pp. 403-414.
Gipps, P. G. 1986b, "Multsim: a model for simulating vehicular traffic on multi-lane arterial roads", Mathematics and Computers in Simulation, vol. 28, no. 4, pp. 291-295.
Gipps, P. G. 1986c, "The role of computer graphics in validating simulation models", Mathematics and Computers in Simulation, vol. 28, no. 4, pp. 285-289.
Green, M. 2000, ""How long does it take to stop?" methodological analysis of driver perception-brake times", Transportation Human Factors, vol. 2, no. 3, pp. 195-216.
Griffin, J. E. & Steel, M. F. J. 2005, "Bayesian stochastic frontier analysis using WinBUGS", retrieved on 26th Oct 2005 at www2. warwick.ac.uk/ fac/ sci/ statistics/ staff/ academic/ steel/ steel_homepage/ techrep/ sfbugs.pdf.
Gunay, B. 2007, "Car following theory with lateral discomfort", Transportation Research
Part B: Methodological, vol. 41, no. 7, pp. 722-735.
Gwilliam, K. 2003, "Urban transport in developing countries", Transport Reviews, vol. 23, no. 2, pp. 197-216.
Hall, F. L. 1999, "Traffic stream characteristics", in Traffic flow theory- a state-of-the-art
report: revised monograph on traffic flow theory, N. Gartner, C. J. Messer & A. K. Rathi, eds., Turner Fairbank Highway Research Center.
Hasan, M., Cuneo, D. & Chachich, A. 1997, "Analysis of traffic video to develop driver

219
behavior models for microscopic traffic simulation", IEEE Conference on Intelligent Transportation System, pp. 747-752.
Helbing, D., Molnar, P., Farkas, I. J. & Bolay, K. 2001, "Self-organizing pedestrian movement", Environment and Planning B: Planning and Design, vol. 28, no. 3, pp. 361-383.
Helbing, D., Farkas, I. & Vicsek, T. 2000, "Simulating dynamical features of escape panic", Nature, vol. 407, no. 6803, pp. 487-490.
Herman, R. & Weiss, G. 1961, "Comments on the Highway-Crossing Problem", Operations Research, vol. 9, no. 6, pp. 828-840.
Hidas, P. 2002, "Modelling lane changing and merging in microscopic traffic simulation", Transportation Research Part C: Emerging Technologies, vol. 10, no. 5-6, pp. 351-371.
Hidas, P. 2005, "Modelling vehicle interactions in microscopic simulation of merging and weaving", Transportation Research Part C: Emerging Technologies, vol. 13, no. 1, pp. 37-62.
Hidas, P. & Wagner, P. 2004, "Review of data collection methods for microscopic traffic simulation", Proceedings of World Conference on Transport Research, Istanbul (Turkey).
Hoogendoorn, S. P., van Zuylen, H. J., Schreuder, M., Gorte, B. & Vosselman, G. 2003, "Microscopic traffic data collection by remote sensing", Transportation Research
Record, vol. 1855, pp. 121-128.
Hoogendoorn, S. P. & Bovy, P. H. L. 2001, "State-of-the-art of vehicular traffic flow modelling", Proceedings of the Institution of Mechanical Engineers, Part I: Journal of
Systems and Control Engineering, vol. 215, no. 4, pp. 283-303.
Hoogendoorn, S. P., Daamen, W. & Bovy, P. H. L. 2003, "Extracting microscopic pedestrian characteristics from video data", Transportation Research Board 82nd Annual Meeting, Washington, DC, USA.
Horswill, M. S. & Helman, S. 2003, "A behavioral comparison between motorcyclists and a matched group of non-motorcycling car drivers: factors influencing accident risk", Accident Analysis and Prevention, vol. 35, no. 4, pp. 589-597.
Hossain, M. 2001, "Estimation of saturation flow at signalised intersections of developing cities: a micro-simulation modelling approach", Transportation Research
Part A: Policy and Practice, vol. 35, no. 2, pp. 123-141.
Howe, J. 2003, "'Filling the middle': Uganda's appropriate transport services", Transport
Reviews, vol. 23, no. 2, pp. 161-176.

220
Hsu, T.-P., Ahmad Farhan, M. S. & Dao, N. X. 2003, A comparison study on motorcycle
traffic development in some Asian countries- case of Taiwan, Malaysia and Vietnam, The Eastern Asia Society for Transportation Studies (EASTS) International Cooperative Research Activity, Tokyo, Retrived 30th Nov, 2004, from www. easts.info/ Awards/ ICRA-Comparison Study Motorcycle Development.pdf.
Huang, B. & Preston, J. 2004, A literature review on motorcycle collisions, Transport Studies Unit, Oxford University, Oxford, England.
Hurdle, D. I. 1997, "Motorcycling: time to apply the brakes?", 25th European Transport Forum Annual Meeting: Policy, Planning and Sustainability, London, pp. 37-48.
Hussain, H., Radin Umar, R. S., Ahmad Farhan, M. S. & Dadang, M. M. 2005, "Key components of a motorcycle-traffic system: a study along the motorcycle path in Malaysia", IATSS Research, vol. 29, no. 1, pp. 50-56.
JBIC 1999, Urban public transportation in Vietnam- improving regulatory framework, JBIC Research Paper No. 4, Japan Bank for International Cooperation, retrieved on 11th November 2004 at www. jbic.go.jp/ english/ research/ report/ paper/ index.php.
Khan, S. I. & Raksuntorn, W. 2001, "Accuracy of numerical rectification of video images to analyze bicycle traffic scenes", Transportation Research Record, vol. 1773, pp. 32-38.
Kim, Y. & Schmidt, P. 2000, "A review and empirical comparison of Bayesian and classical approaches to inference on efficiency levels in stochastic frontier models with panel data", Journal of Productivity Analysis, vol. 14, no. 2, pp. 91-118.
Kimber, R. M., McDonald, M. & Hounsell, N. 1985, "Passenger car units in saturation flows: Concept, definition, derivation", Transportation Research Part B:
Methodological, vol. 19, no. 1, pp. 39-61.
Kisaalita, W. S. & Sentongo-Kibalama, J. 2007, "Delivery of urban transport in developing countries: the case for the motorcycle taxi service (boda-boda) operators of Kampala", Development Southern Africa, vol. 24, no. 2, pp. 345-357.
Kometani, E. & Sasaki, T. 1959, "Dynamic behaviour of traffic with a nonlinear spacing-speed relationship", Proceedings of the Symposium on Theory of Traffic Flow, Research Laboratories, General Motors, pp. 105-119.
Koop, G., Osiewalski, J. & Steel, M. F. J. 1994, "Bayesian efficiency analysis with a flexible form: The AIM cost function", Journal of Business & Economic Statistics, vol. 12, no. 3, pp. 339-346.
Krauss, S. 1998, Microscopic modeling of traffic flow: investigation of collision free
vehicle dynamics, PhD dissertation, Mathematisches Institut, Universitat zu Koln.
Kumbhakar, S. C. & Tsionas, E. G. 2005, "Measuring technical and allocative

221
inefficiency in the translog cost system: a Bayesian approach", Journal of
Econometrics, vol. 126, no. 2, pp. 355-384.
Lan, L. W. & Chang, C. W. 2005, "Inhomogeneous cellular automata modeling for mixed traffic with cars and motorcycles", Journal of Advanced Transportation, vol. 39, no. 3, pp. 323-349.
Lan, L. W. & Hsu, C. C. 2006, "Formation of spatiotemporal traffic patterns with cellular automaton simulation", Transportation Research Board 85th Annual Meeting, Washington, DC, USA.
Lan, L. W. & Chang, C.-W. 2004, "Motorcycle-following models of General Motors (GM) and Adaptive Neuro-Fuzzy Inference System (in Chinese)", Transportation Planning
Journal, vol. 33, no. 3, pp. 511-536.
Langton, C. G. 1989, "Artificial Life", in Artificial life : proceedings of an
interdisciplinary workshop on the synthesis and simulation of living systems held
September 1987 in Los Alamos, New Mexico, C. G. Langton, ed., Addison-Wesley Publishing Company, Redwood City, pp. 1-47.
Lee, T.-C., Polak, J. W. & Bell, M. G. H. 2006, "The two-dimensional headway distribution of modelling motorcycles in mixed traffic flow", 38th Annual Conference of the Universities' Transport Study Group (UTSG), Dublin.
Lee, T.-C., Polak, J. W. & Bell, M. G. H. 2007, "Do motorcyclists behave aggressively: a comparison of the kinematical features between motorcycles and passenger cars in urban networks", 11th World Conference on Transportation Research, Berkeley, USA.
Leutzbach, W. & Wiedemann, R. 1986, "Development and applications of traffic simulation models at the Karlsruhe Institut fur Verkehrwesen", Traffic engineering and
control, vol. 27, no. 5, pp. 270-278.
Lighthill, M. H. & Whitham, G. B. 1957, "On kinematic waves: a theory of traffic flow on long crowded roads", Proceedings of the Royal Society: Series A, vol. 229, pp. 317-345.
Lin, S.-P., Chen, Y.-H. & Wu, B.-F. 2006, "A real-time multiple-vehicle detection and tracking system with prior occlusion detection and resolution, and rrior queue detection and resolution", 18th International Conference on Pattern Recognition (ICPR 06), pp. 828-831.
Lovell, K. & Kumbhakar, S. 2003, Stochastic frontier analysis, Cambridge University Press, Cambridge.
Lu, X.-Y. & Skabardonis, A. 2007, "Freeway traffic shockwave analysis: exploring the NGSIM trajectory data", Transportation Research Board 86th Annual Meeting, Washington, DC, USA.

222
Luck, M., Griffiths, N. & d'Inverno, M. 1997, "From agent theory to agent construction: a case study", in Intelligent Agents III: Agent Theories, Architectures, and Languages, J. P. Müller, M. J. Wooldridge & N. R. Jennings, eds., Springer, London, pp. 49-63.
Madanat, S. M., Cassidy, M. J. & Wang, M. H. 1994, "Probabilistic delay model at stop-controlled intersection", ASCE Journal of Transportation Engineering, vol. 120, no. 1, pp. 21-36.
Mahmassani, H. & Sheffi, Y. 1981, "Using gap sequences to estimate gap acceptance functions", Transportation Research Part B: Methodological, vol. 15B, no. 3, pp. 143-148.
Martin, B., Phull, S. & Robertson, S. A. 2001, "Motorcycling and congestion", European Transport Conference, Association for European Transport, London.
May, A. D. & Montgomery, F. O. 1986, Control of congestion at highly saturated
signalized intersections: experiments on Rama 4 road, Bangkok, Working paper 222, Institute for Transport Studies, University of Leeds, UK.
Meeusen, W. & van den Broeck, J. 1977, "Efficiency estimation from Cobb-Douglas production functions with composed error", International Economic Review, vol. 18, no. 2, pp. 435-444.
Metropolis, N., Rosenbluth, A. W., Rosenbluth, M. N., Teller, A. H. & Teller, E. 1953, "Equation of state calculations by fast computing machines", The Journal of Chemical
Physics, vol. 21, no. 6, pp. 1087-1092.
Michaels, R. M. 1963, "Perceptual factors in car following", Proceedings of the Second
International Symposium on the Theory of Road Traffic Flow pp. 44-59.
Mikhail, E. M., Bethel, J. S. & McGlone, J. C. 2001, "Mathematics for photogrammetry", in Introduction to modern photogrammetry, John Wiley & Sons, Inc., New York, pp. 351-386.
Miller, A. J. 1972, "Nine estimators of gap-acceptance parameters", Proceedings of the 5th International Symposium of the Theory of Traffic Flow, New York: Elsevier, pp. 215-235.
Minh, C. C., Matsumoto, S. & Sano, K. 2005a, "Characteristics of passing and paired riding maneuvers of motorcycle", Journal of the Eastern Asia Society for
Transportation Studies, vol. 6, pp. 186-197.
Minh, C. C., Matsumoto, S. & Sano, K. 2005b, "The speed, flow and headway analyses of motorcycle traffic", Journal of the Eastern Asia Society for Transportation Studies, vol. 6, pp. 1496-1508.
Minh, C. C., Sano, K. & Matsumoto, S. 2006, "Deceleration models of motorcycles at signalized intersections", Transportation Research Board 85th Annual Meeting,

223
Washington, DC, USA.
MRA 2006, Inquiry into managing transport congestion, Motorcycle Riders' Association of Australia, retrieved on 8th August at www. mraa.org.au/ downloads/ files/ Congestion%20paper%20MRAA.pdf.
Müller, J. P. 1996, The design of intelligent agents- a layered approach, Springer, London.
Nagel, K. & Raney, B. 2003, "Large scale multi-agent simulations for transportation applications", Behavioural Responses to ITS, Eindhoven.
Nagel, K. & Rasmussen, S. 1994, "Traffic at the edge of chaos", in Artificial Life IV:
Proceedings of the Fourth International Workshop on the Synthesis and Simulation of
Living Systems, R. Brooks & P. Maes, eds., MIT Press, Cambridge, Mass, pp. 222-235.
Nagel, K., Barrett, C. L. & Rickert, M. 1996, Parallel traffic micro-simulation by cellular
automata and application for large scale transportation modeling, 96:0050, Los Alamos National Laboratory, Los Alamos, New Mexico, USA.
Nagel, K., Rickert, M. & Barrett, C. L. 1997, Large scale traffic simulations, LA-UR--97-281, Los Alamos National Laboratory, Los Alamos, New Mexico, USA, retrieved on 20th August 2007 at www. osti.gov/ energycitations/ product. biblio. jsp?osti_id= 459884.
Nagel, K. & Schreckenberg, M. 1992, "A cellular automaton model for freeway traffic", Journal de Physique I, vol. 2, no. 1992, pp. 2221-2229.
Newell, G. F. 1961, "Nonlinear effects in the dynamics of car following", Operations
Research, vol. 9, no. 2, pp. 209-229.
Nguyen, H. Q. & Montgomery, F. 2006, "Comparison of discharge patterns at traffic signals", Transportation Research Board 85th Annual Meeting, Washington, DC, USA.
O'Sullivan, D. & Haklay, M. 2000, "Agent-based models and individualism: is the world agent-based?", Environment and Planning A, vol. 32, no. 8, pp. 1409-1425.
Oketch, T. G. 2000, "New modeling approach for mixed-traffic streams with nonmotorized vehicles", Transportation Research Record, vol. 1705, pp. 61-69.
Olsen, E. C. B. & Wierwille, W. W. 2001, "A unique approach for data analysis of naturalistic driver behavior data", SAE Future Transportation Technology Conference, Costa Mesa, CA, retrieved on 22nd November 2004 at filebox.vt.edu/ users/ eolsen/ files/ papers/ olsen_wierwille_2001_SAE.pdf.
Olstam, J. J. & Tapani, A. 2004, Comparison of car-following models, VTI meddelande 960A, Swedish National Road and Transport Research Institute, retrieved on 29th

224
April 2005 at 62.119.60.67/ templates/ Report____2796.aspx? reportid=2455.
Osiewalski, J. & Steel, M. F. J. 1998, "Numerical tools for the Bayesian analysis of stochastic frontier models", Journal of Productivity Analysis, vol. 10, no. 1, pp. 103-117.
Panwai, S. & Dia, H. 2005, "Comparative evaluation of microscopic car-following behavior", IEEE Transactions on Intelligent Transportation Systems, vol. 6, no. 5, pp. 314-325.
Paruchuri, P., Pullalarevu, A. R. & Karlapalem, K. 2002, "Multi agent simulation of unorganized traffic", Proceedings of the Multi-agent-based simulation II: Third international workshop, MABS, Bologna, Italy.
Pipes, L. A. 1953, "An Operational Analysis of Traffic Dynamics", Journal of Applied
Physics, vol. 24, no. 3, pp. 274-281.
Powell, M. 2000, "A model to represent motorcycle behaviour at signalised intersections incorporating an amended first order macroscopic approach", Transportation
Research Part A: Policy and Practice, vol. 34, no. 7, pp. 497-514.
Punzo, V. & Simonelli, F. 2005, "Analysis and comparison of microscopic traffic flow models with real traffic microscopic data", Transportation Research Record, vol. 1934, pp. 53-63.
Repast Development Team 2007, "Repast 3 Overview", http://repast.sourceforge.net/.
Reynolds, C. W. 1987, "Flocks, herds and schools: a distributed behavioral model", Computer Graphics (ACM SIGGRAPH '87 Conference Proceedings), vol. 21, no. 4, pp. 25-34.
Robertson, S. A. 2002, "Motorcycling and congestion: definition of behaviours", in Contemporary Ergonomics 2002, P. T. McCabe, ed., Taylor & Francis, London, pp. 273-277.
Robertson, S. A. 2003, "Motorcycling and congestion: behavioural impacts of a high proportion of motorcycles", in Contemporary Ergonomics 2003, P. T. McCabe, ed., Taylor & Francis, London, pp. 417-422.
Rongviriyapanich, T. & Suppattrakul, C. 2005, "Effects of motorcycles on traffic operations on arterial streets", Journal of the Eastern Asia Society for Transportation
Studies, vol. 6, pp. 137-146.
Sano, K., Minh, C. C., Wisetjindawat, W. & Sattayaprasert, W. 2005, "A study on the behavior of delivery motorcycles in Bangkok", Journal of the Eastern Asia Society for
Transportation Studies, vol. 6, pp. 157-172.
Sharp, R. S. 2001, "Stability, control and steering responses of motorcycles", Vehicle

225
System Dynamics, vol. 35, no. 4-5, pp. 291-318.
Silcock, J. P. 1993, "SIGSIM version 1.0 user guide", Working Paper, Centre for Transport Studies, University College London, UK.
Skabardonis, A. & May, A. D. 1998, "Simulation models for freeway corridors: state-of-art and research needs", Transportation Research Board 77th Annual Meeting, Washington, DC, USA.
Slinn, M., Guest, P. & Matthews, P. 1998, "Traffic surveys", in Traffic engineering
design- principles and practice, Arnold, London, pp. 6-26.
Smith, L. L. 1995, TRANSIMS Travelogue, LAUR-95-1240, Los Alamos National Laboratory, Los Alamos, New Mexico. retrieved on 3rd May 2006 at www. ccs.lanl.gov/ transims/ travel.shtml.
Sony Corporation 2005, "Sony digital video camera recorder Handycam operating guide: DCR-HC32/HC42".
Spiegelhalter, D. J., Best, N. G., Carlin, B. P. & Linde, A. V. D. 2002, "Bayesian measures of model complexity and fit", Journal of the Royal Statistical Society: Series B
(Statistical Methodology), vol. 64, no. 4, pp. 583-639.
Spiegelhalter, D., Thomas, A., Best, N. & Lunn, D. 2003, "WinBUGS user manual- version 1.4", retrieved from the BUGS project at www.mrc-bsu.cam.ac.uk/ bugs/ winbugs/ manual14.pdf on 28th March 2007.
Swarm Development Group 2004, "Documentation set for Swarm 2.2", retrieved on 31st August 2007 at www. swarm.org/ swarmdocs-2.2/ set/ set.pdf.
Tang, K.-H. 2003, "A field study on validation of supplemental brake lamp with flashing turn signals for motorcycles", International Journal of Industrial Ergonomics, vol. 31, no. 5, pp. 295-302.
Taylor, M. A. P. & Young, W. 1988, Traffic analysis- new technology & new solutions, Hargreen Publishing Company, Victoria, Australia.
Teknomo, K., Takeyama, Y. & Inamura, H. 2000, "Data collection method for pedestrian movement variables", Journal of Civil Engineering Science and Technology, vol. 2, no. 1, pp. 43-48.
The BUGS Project 2004, "The BUGS project", retrieved on 15th July 2006 at www. mrc-bsu.cam.ac.uk/ bugs/ winbugs/ contents.shtml.
The BUGS Project 2006, "DIC: deviance information criterion", retrieved on 15th July 2006 at www. mrc-bsu.cam.ac.uk/ bugs/.
The ViVAtraffic-Team 2007, "ViVAtraffic- The video traffic analysis system", retrieved on 22nd January 2007 at transport.arubi.uni-kl.de/ ViVAtraffic/ English/.

226
Tobias, R. & Hofmann, C. 2004, "Evaluation of free Java-libraries for social-scientific agent based simulation", Journal of Artificial Societies and Social Simulation, vol. 7, no. 1, p. retrieved on 8th May 2004 at jasss. soc.surrey.ac.uk/ 7/1/6.html.
Toledo, T. 2003, Integrated driving behavior modeling, PhD dissertation, Massachusetts Institute of Technology, USA.
Toledo, T. 2007, "Driving behaviour: models and challenges", Transport Reviews, vol. 27, no. 1, pp. 65-84.
Tsai, R. 1987, "A versatile camera calibration technique for high-accuracy 3D machine vision metrology using off-the-shelf TV cameras and lenses", IEEE Journal of
Robotics and Automation, vol. 3, no. 4, pp. 323-344.
Tsionas, E. G. 2002, "Stochastic frontier models with random coefficients", Journal of
Applied Econometrics, vol. 17, no. 2, pp. 127-147.
Turner, J. & Harahap, G. 1993, Simplified saturation flow data collection methods, PA1292/93, Transport Research Laboratory, Crowthorne, UK.
van den Broeck, J., Koop, G., Osiewalski, J. & Steel, M. F. J. 1994, "Stochastic frontier models : A Bayesian perspective", Journal of Econometrics, vol. 61, no. 2, pp. 273-303.
Vavryn, K. & Winkelbauer, M. 2004, "Braking performance of experienced and novice motorcycle riders- rusults of a field study", 3rd International Conference on Traffic and Transportation Psychology, Nottingham, UK.
Veeraraghavan, H., Atev, S., Masoud, O., Miller, G. & Papanikolopoulos, N. 2005, Development of a tracking-based monitoring and data collection system, MN/RC-2005-40, Minnesota Department of Transportation, Minnesota,USA.
Venables, W. N., Smith, D. M. & the R Development Core Team 2006, An introduction to
R, retrieved on 23rd June 2007 at www. r-project.org/.
Wei, H., Lee, J., Li, Q. & Li, C. J. 2000, "Observation-based lane-vehicle assignment hierarchy: microscopic simulation on urban street network", Transportation Research
Record, vol. 1710, pp. 96-103.
Wei, H., Feng, C., Meyer, E. & Lee, J. 1999, "Video-capture-based methodology for extracting multiple vehicle trajectories for microscopic simulation modeling", Transportation Research Board 78th Annual Meeting, Washington, DC, USA.
Wei, H., Feng, C., Meyer, E. & Lee, J. 2005, "Video-capture-based approach to extract multiple vehicular trajectory data for traffic modeling", Journal of Transportation
Engineering, vol. 131, no. 7, pp. 496-505.
Wigan, M. R. 2000, Motorcycle transport: powered two wheelers in Victoria, Report

227
2000-1-1, VicRoads, Melbourne, Australia, retrieved on 11th November 2004 at www. vicroads.vic.gov.au/ vrpdf/trum/ oxford2000vol1_1f.pdf.
Wigan, M. R. 2001, "Motorcycles as transport", European Transport Conference, Association for European Transport, London, UK.
Wigan, M. R. 2002, "Motorcycles as a full mode of transportation", Transportation
Research Record, vol. 1818, pp. 39-46.
Wooldridge, M. J. & Jennings, N. R. 1995, "Intelligent agents: theory and practice", The
Knowledge Engineering Review, vol. 10, no. 2, pp. 115-152.
Yang, Q. 1997, A simulation laboratory for evaluation of dynamic traffic management
systems, PhD dissertation, Massachusetts Institute of Technology, USA.
Yannis, G., Golias, J., Spyropoulou, I. & Papadimitriou, E. 2007, "Mobility patterns of motorcycle and moped riders in Greece", Transportation Research Record, vol. 2031, pp. 69-75.