MI DAB 2015 - Hochschule für Technik Rapperswil...Introduction: Eurobot is an international...
1
Introduction: Eurobot is an international robotics contest, which took place in Yverdon, Switzerland, from 21 till 24 of May 2015. The theme for Eurobot 2015 was Robomovies. The robots had to perform in a Hollywood inspired environment. They were autonomous and could interact with each other. Objective: The HSR competed with an interdisciplinary team of seven mechanical and five electrical engineering students. To complete the given tasks the HSR developed a leader (Q-Bot) and a follower robot (M-Bot). Good project management, task sharing and team spirit were needed to be successful in the competition. Result: The main challenges were closing clapperboards, handling cups and popcorn, climbing stairs and piling up towers with a ball on top. The follower robot (M-Bot) and the leader robot (Q-Bot) were developed, assembled, programmed and tested for participa- ting in the contest. M-Bot uses two electrically driven wheels for moving on the ground. In addition, two encoders were installed to know the robots position on the playing area. M-Bot was able to pile up two towers at the same time. It is characterised by a radial gripper that can be moved vertically on a threaded bar by a DC motor. Q-Bot uses two coupled drives: a spring mounted chain drive for climbing stairs and two inline skates on a shaft for moving on the ground. The robot can switch the drive unit by a knee lever mechanism. A radial flow fan provides sufficient airflow to convey the balls. In the winter semester of 2014 the team designed the two robots and ordered all parts from the manu- facturer. During the summer semester of 2015 the robots were assembled, programmed and tested. The team fixed minor design issues and improved the reliability of the system, one of the most challenging tasks. To gain points during the 90-second game the team implemented different strategies. The team «Quantum of HSR» achieved third place in the national competition and qualified for the international competition, where it ranked fifth. With the HSR Eurobot guideline the team has created a document to transfer the know-how to newer HSR Eurobot generations. Q-Bot and M-Bot in action at the Eurobot competition 2015 M-Bot closing a clapperboard M-Bot placing a spotlight Graduate Candidates Thomas Bucher, Manuel Hummer Examiner Prof. Dr. Christian Bermes Co-Examiner Janosch Nikolic, Autonomous Systems Lab, ETH Zürich Subject Area Automation & Robotik Eurobot 2015 Development of a follower robot for Eurobot 2015 competition Thomas Bucher Manuel Hummer 19
Transcript of MI DAB 2015 - Hochschule für Technik Rapperswil...Introduction: Eurobot is an international...

Introduction: Eurobot is an international robotics contest, which took place in Yverdon,
Switzerland, from 21 till 24 of May 2015. The theme for Eurobot 2015 was Robomovies.
The robots had to perform in a Hollywood inspired environment. They were auto nomous
and could interact with each other.
Objective: The HSR competed with an interdisciplinary team of seven mechanical and five
electrical engineering students. To complete the given tasks the HSR developed a leader
(Q-Bot) and a follower robot (M-Bot). Good project management, task sharing and team
spirit were needed to be successful in the competition.
Result: The main challenges were closing clapperboards, handling cups and popcorn,
climbing stairs and piling up towers with a ball on top. The follower robot (M-Bot) and the
leader robot (Q-Bot) were developed, assembled, programmed and tested for participa-
ting in the contest. M-Bot uses two electrically driven wheels for moving on the ground.
In addition, two encoders were installed to know the robots position on the playing area.
M-Bot was able to pile up two towers at the same time. It is characterised by a radial
gripper that can be moved vertically on a threaded bar by a DC motor. Q-Bot uses two
coupled drives: a spring mounted chain drive for climbing stairs and two inline skates on
a shaft for moving on the ground. The robot can switch the drive unit by a knee lever
mechanism. A radial flow fan provides sufficient airflow to convey the balls. In the winter
semester of 2014 the team designed the two robots and ordered all parts from the manu-
facturer. During the summer semester of 2015 the robots were assembled, programmed
and tested. The team fixed minor design issues and improved the reliability of the system,
one of the most challenging tasks. To gain points during the 90-second game the team
implemented different strategies. The team «Quantum of HSR» achieved third place in
the national competition and qualified for the international competition, where it ranked
fifth. With the HSR Eurobot guideline the team has created a document to transfer the
know-how to newer HSR Eurobot generations.
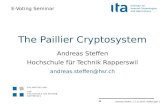
Q-Bot and M-Bot in action at the Eurobot competition 2015
M-Bot closing a clapperboard
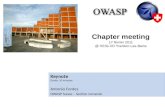
M-Bot placing a spotlight
Graduate Candidates Thomas Bucher, Manuel Hummer
Examiner Prof. Dr. Christian Bermes
Co-Examiner Janosch Nikolic, Autonomous Systems Lab, ETH Zürich
Subject Area Automation & Robotik
Eurobot 2015Development of a follower robot for Eurobot 2015 competition
ThomasBucher
Manuel Hummer
19