Metrology, Instruments, Sensors, Beaconing,...
25
1 ETH Zurich Engineering Geodesy - Prof. Dr. H. Ingensand Metrology, Instruments, Sensors, Beaconing, Signalisation Metrology, Instruments, Sensors, Beaconing, Signalisation ETH Zurich Engineering Geodesy - Prof. Dr. H. Ingensand The Variety of Sensors,Instruments and Methods in EG ETH Zurich Engineering Geodesy - Prof. Dr. H. Ingensand Monitoring projects Sensors Measuring Methods Experts Accuracy Connection Calibration Logistics Civil engineer Mechanical engineer Geologist Metrology specialist Period Permanent Filtering Marginal Check Zero measuring 1. Measuring i. Measuring Analysis of deformation Visualisation Adjustment Adjustment Adjustment The Environment: Sensors The Environment: Sensors – Measuring Methods Measuring Methods – Expert Expert ETH Zurich Engineering Geodesy - Prof. Dr. H. Ingensand Monitoring Sensors, Instruments: Overview Monitoring Sensors, Instruments: Overview Pressure sensors Hydrostatic systems Displacement transducers (extensometers, crack- and jointmeters, etc.) Strain gauges (tension gauges) Tiltmeters, including vibrating wire Load cells (force measurement) Fixed removable micrometers (FIM) Optical fiber Optical positioning sensors Motorized total stations GPS Digital levels, including those with automated positioning Meteorological sensors Temperature sensors pH and conductivity meters Gas sensors GEOPHYSICS GEODESY PHYSICS CHEMISTRY Geotechnics ETH Zurich Engineering Geodesy - Prof. Dr. H. Ingensand Methods:Accuracy Methods:Accuracy versus Range versus Range ETH Zurich Engineering Geodesy - Prof. Dr. H. Ingensand Referenzpunkt Standpunkt GPS T_MOT DIGNIV_MOT Referenzpunkt Referenzpunkt Reflektor Geodetic Measurement Scenario for Slope Movements Geodetic Measurement Scenario for Slope Movements
Transcript of Metrology, Instruments, Sensors, Beaconing,...

1
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Metrology, Instruments, Sensors, Beaconing, SignalisationMetrology, Instruments, Sensors, Beaconing, Signalisation
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
The Variety of Sensors,Instruments and Methods in EG
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Monitoring projects
Sensors Measuring Methods Experts
Accuracy
Connection
Calibration
Logistics
Civil engineer
Mechanical engineer
Geologist
Metrology specialist
Period Permanent
Filtering
Marginal Check
Zero measuring
1. Measuring
i. Measuring
Analysis of deformation
Visualisation
Adjustment
Adjustment
Adjustment
The Environment: Sensors The Environment: Sensors –– Measuring Methods Measuring Methods –– ExpertExpert
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Monitoring Sensors, Instruments: OverviewMonitoring Sensors, Instruments: Overview
Pressure sensorsHydrostatic systemsDisplacement transducers (extensometers, crack- and jointmeters, etc.)Strain gauges (tension gauges)Tiltmeters, including vibrating wireLoad cells (force measurement)Fixed removable micrometers (FIM)Optical fiberOptical positioning sensors
Motorized total stationsGPSDigital levels, including those with automated positioning Meteorological sensorsTemperature sensors
pH and conductivity metersGas sensors
GEO
PHYSIC
S GEO
DESY PH
YSICS C
HEM
ISTRY
Geotechnics
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Methods:AccuracyMethods:Accuracy versus Rangeversus Range
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Referenzpunkt
Standpunkt
GPS
T_MOTDIGNIV_MOT Referenzpunkt
Referenzpunkt
Reflektor
Geodetic Measurement Scenario for Slope MovementsGeodetic Measurement Scenario for Slope Movements

2
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Slope MovementsSlope Movements
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Instrumentation for Rockfall MeasurementsInstrumentation for Rockfall Measurements
Extensometer
Inclinometer
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
General Specification (Quality) of Sensors/Instruments/MethodsGeneral Specification (Quality) of Sensors/Instruments/Methods
Accuracy / Precision/ ResolutionLinearityCalibration Stability (long term stability)SynchronisationInterfaces/ Remote controlPower level; Power ConsumptionProtected against meteo-influencesElectromagnetic shieldingAvailabilitySupportCosts
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Sensors/InstrumentsSensors/Instruments1D Length 1D Length ––HeightHeight2D Coordinates/Position2D Coordinates/Position3D Coordinates/Position3D Coordinates/Position
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Single/Multi Distance MeasurementsSingle/Multi Distance Measurements
--Extensometers Bars/Wires/Extensometers Bars/Wires/FiberFiber--Optical Sensors (relative Distance)Optical Sensors (relative Distance)--EDM (relative and absolute distances)EDM (relative and absolute distances)
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
TelejointmeterTelejointmeter ((HuggenbergerHuggenberger))
3
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
TeletensometerTeletensometer ((HuggenbergerHuggenberger))
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Crack Meter (Crack Meter (RissmikrometerRissmikrometer))
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
ExtensometryExtensometry ((Deformeter/HuggenbergerDeformeter/Huggenberger))
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Extensometer (WireExtensometer (Wire-- & Bar& Bar--Extensometer)Extensometer)
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Borehole Extensometer Borehole Extensometer ““NalpsNalps””
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
The ISETH SystemThe ISETH System

4
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
DrahtDraht Extensometer Extensometer DistometerDistometer ISETHISETH
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Wire Extensometer (ISETH)Wire Extensometer (ISETH)
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
FiberFiber Optical Sensors: OSMOS, Optical Sensors: OSMOS, SmartecSmartec,,
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
LED
A/D
Coupler
LEDPhoto-Diode
Mobile Mirror
SOFO reading Unit
Micro Controller
InterferometryInterferometry: SOFO V System : SOFO V System
Modem
Modem
RS232
PCSOFODB
OpticalSwitch
SOFObus
Bridge Data Acquisiton Units
Standard Sensors
Membrane Sensors
Other SOFO Sensors (Force, T,…)Data-logger
Click or press spacebar to advance in the animation
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
SOFO SOFO DynamicDynamic
Functional Principle:
Laser1550nm
Mirr
ors
Structure under test Coupler
Phase Modulator
SOFO DynamicDemodulator
Photo-Diode
Digital Output
DSPAnalog Output
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
SOFO Reading UnitsSOFO Reading Units
Through 3rd party DAQYes, integratedData logging
SimultaneousSequentialAcquisition
8 per moduleUnlimitedNumber of channels
Analog outputDigital output
SDB monitoring database
Output
0 to 1 kHzStatic Bandwidth
Compatible with all SOFO sensorsSensor compatibility
Incremental relativeSelf-referenced relative Type of measurement
Dynamic measurements
Short- and long-term static monitoring
Application
SOFO DynamicSOFO V

5
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
SOFO System ComponentsSOFO System ComponentsSOFO System Components
• Portable, rack or permanent.• Battery / AC power supply.• Rugged and waterproof.• Integrated Datalogger.• Modem connection.
• Rugged, watertight.• Insensitive to temperature, EM
fields, corrosion,…• Easy and rapid to install.• No calibration required.
Reading units
Sensors
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
SOFO Sensor FamilySOFO Sensor Family
Standard Sensor
DETAN Force Sensor
Concrete Setting Sen.
Dis
plac
emen
tSe
nsor
SMARTape
Inclinometer
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Standard Sensor InstallationStandard Sensor Installation
Concrete Embedding
Surface Installation
BoreholeInjection
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Fiber Bragg Grating SensorsFiber Bragg Grating Sensors
The reflected wavelengthThe reflected wavelengthdepends on the strain anddepends on the strain andtemperature of the fibertemperature of the fiber
Ca. 1cmCa. 1cm
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
MultiplexedMultiplexed SensingSensing
λλ11 λλ22
λλ33
λλnn
λλ11
λλ22
λλ33λλnn
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
MuST System ComponentsMuST System ComponentsMuST System Components
Sensors
• Permanent installation.• AC/DC power supply.• Rugged and waterproof version.• Ethernet connection.
• Strain and temperature multiplexed sensors
• Rugged, watertight.• Insensitive to temperature, EM
fields, corrosion,…• Easy and rapid to install.• Embeddable in concrete and
composites.
Reading units

6
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
MuST Deformation SensorsMuST Deformation SensorsMuST Deformation Sensors
Temperature measurement and compensation for each sensorUp to 5 sensors per chainMeasurement basis: 25 cm to 2 m
Single-ended
Double-ended
Chained
∆LT
∆LT
∆LT
∆L T
∆LT
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
DiTeStDiTeSt Brillouin ScatteringBrillouin Scattering
The interaction between acousticand optical waves depends onthe strain and temperature stateof the fiber.
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
DistributedDistributed SensingSensing
FF
εT1
Position [m]
Stra
in[µε]
Reading Unit
Distributed Sensor0m
1m 100m
1000m
20km
T1
ε
T2
T2
Position [m]
Tem
p. [°
C]
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
ElectroElectro opticaloptical distance distance metermeter (EDM)(EDM)
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
DICLAS: Continuous Distance Measurement by laserDICLAS: Continuous Distance Measurement by laser
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
DimetixDimetix PolydistPolydist

7
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Alignment toolsAlignment tools-- wireswires--optical alignmentoptical alignment--laser alignmentlaser alignment
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Alignment PrincipleAlignment Principle
Principle of optical alignment:Between two permanently installed points (alignment instrument and Mire) a vertical layer is set. Measured are the shortest horizontal distances between the alignment points (marked with alignment target signs) and the vertical layer.
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Optical Alignment (Optical Alignment (FreibergerFreiberger PrPrääzisionsmechanikzisionsmechanik))
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Alignment InstrumentsAlignment Instruments
1,5kgGewicht350x290x180mmAbmessungen
Behälter
2,7kgGewicht265x140mmAbmessungen
Instrument
-20°C...+50°CArbeitsbereich
Temperatur
20" / IntervallNivellierlibelle45" / IntervallStehachslibelle
Libellen
100Multiplikationskonstante1,2mkürzeste Zielweite30mmfreier Objektivdurchmesser2° (3,5m / 100m)Sehfeldwinkel20xVergrößerung
aufrechtseitenrichtig
Bildlage
Fernrohr
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
PlumbingPlumbing-- optical plumbingoptical plumbing-- mechanical plumbing (wires)mechanical plumbing (wires)
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Zenith Plumbs (Zenith Plumbs (FreibergerFreiberger PrPrääzisionsmechanikzisionsmechanik))
3,5kgGewicht
140x295mmAbmessungen
Instrument
5mmMikrometerbereich
-25°C...+45°CArbeitsbereich
Temperatur
±0,15"mittlerer Einspielfehler
±10´Arbeitsbereich
Kompensator
40mmfreier Objektivdurchmesser
2,2mkürzeste Zielweite
32xVergrößerung
aufrechtseitenrichtig
Bildlage
Fernrohr
±1mmmittlerer Lotfehler auf 100m
Messgenauigkeit

8
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Tiefe 800 mGenauigkeit 5 mm
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Optische Lotung (Optische Lotung (SwissphotoSwissphoto/ETH)/ETH)
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Mechanische Lotung (Gorleben Team) Mechanische Lotung (Gorleben Team)
Haspel mit Draht Ø 2mm 800 m Draht = 17 kg Stahl
Umlenkrolle
Gewichte 19 x 25 kg
Einmessung Drähte obenETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Lotbeobachtung mit T 2002
Gewichte entfernen
Team GorlebenAuswertung vor Ort mit Excel
Mechanische Lotung: untenMechanische Lotung: unten
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
EinflEinflüüsse auf die mechanische Lotungsse auf die mechanische Lotung
DrehschwingungenSchwingungen durch spiralförmige Verwirbelungen im Schacht Tropfwasser-EinflüsseLotverschiebungen wegen Ausweichen aus der SchachtachseLotabweichung durch inhomogene Schwereverteilung
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Auswertung der SchwingungenAuswertung der Schwingungen
U [m]
t [s]
U1
U2
U3
U4
U5
m u u uii i
i= ⋅+
+⎛⎝⎜
⎞⎠⎟
++
12 2
21
[ ]xmn
i=

9
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Ideen zur Lotbeobachtung mit LPSIdeen zur Lotbeobachtung mit LPS
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Die MehrgewichtlotungDie Mehrgewichtlotung
Das Lot pendelt um eine Ruhelage. Die Abweichung der Ruhelage von der Lotrechten ist durch Mehrgewichtslotung unter der Annahme, dass ein doppelt schweres Lot halb so weit ausgelenkt wird, erfassbar [SCHULTE, LÖHR, VOSEN, 1968; SCHULER, 1954; EMSCHERMANN 1938].
Dabei wird bei gleicher Lotlänge nacheinander mit verschiedenen Gewichten gelotet. Aus den unterschiedlichen Ruhelagen lässt sich dann die lotrechte Lage berechnen. Die 2-Gewichtslotung hat sich im Fall der Mehrgewichtslotung durchgesetzt.
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
MehrgewichtslotungMehrgewichtslotungUnter Berücksichtigung des halben Lotgewichtes und unter der Voraussetzung, dass ein schwereres Gewicht geringer ausgelenkt wird als ein leichteres, können die Abdriften wie folgt berechnet werden:
aa
= PP
1
2
2
1
a =
P1 2− −aa
PP
2
2
1
1
aa
P PP
aP P
P12
2 12
1
1 21 =
a und a =
a12
2−−
⋅−−
⋅
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Direction MeasurementTheodolitesPhotogrammetry (One Image Photogrammetry)
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
PhotogrammetricPhotogrammetric ApproachApproach
http://www.uni-weimar.de/Bauing/Vermess/forschung.html
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Motorized Motorized Theodolites/VideotheodolitesTheodolites/Videotheodolites
Videotheodolites (Intzersection Method)Motorised tacheometer (vector measurement)Motorised tacheometer (contactless, scanning method)
Base
Intersection geometry influence as in Photogrammetry

10
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Vector Measurement SystemsVector Measurement Systems
-- Total Stations/Total Stations/TacheometersTacheometers-- Terrestrial Laser ScanningTerrestrial Laser Scanning-- Aerial Aerial LaserscanningLaserscanning
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
MotorizedMotorized TheodolitesTheodolites „„FranaFrana Campo Valle Campo Valle MaggiaMaggia““
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Influences of GlassInfluences of Glass
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Instrumentensegment Visurlinie Zielsegment
• Instrumentenabweichungen
intern
• Meteo (Druck, Temperatur,
Feuchte)
• Ausrichtung Prisma
• Temperaturschwankungen • Refraktion (-> HZ, V) • Verschmutzung Prisma
• Verdrehung Instrument • Optisches Element im Strah-
lengang
• Pfeilerstabilität
• Verschmutzung Objektiv • Temperaturausdehnung
Stochastic and systematic Effects
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Frana Campo Valle MaggiaFrana Campo Valle Maggia
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
TerrrestrialTerrrestrial and aerial and aerial LaserscanningLaserscanning

11
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Laser Scanning: Rockfall Laser Scanning: Rockfall ScharansScharans (ETHZ,1995)(ETHZ,1995)
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
TechnologieTechnologie--Evolution Evolution „„DOT DOT SurveyingSurveying““
OptechOptech
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
LaserscanningLaserscanning in Engineering in Engineering GeodesyGeodesy ((NalpsNalps 2005) HDS35002005) HDS3500
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
LiDARLiDAR --
D-GPS
INS
Laser-Ranging
INS
Yaw
Roll
Pitch
Z
Y
X
D-GPS
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
InterferometryInterferometry
-- RadarRadar--LaserLaser
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Radar Radar InterferometryInterferometry

12
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Basic Principle of Basic Principle of InterferometryInterferometry
http://www.uni-weimar.de/Bauing/Vermess/dokumente/Fahne_InterferometrieBruecken.jpgETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Inclination SensorsInclination Sensors
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Liquid Liquid SurfaceSurface withwith opticaloptical positionposition sensorsensor (PSD)(PSD)
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Borehole Inclination SensorBorehole Inclination Sensor
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Height DeterminationHeight Determination
-- Levelling , Levelling , -- motorised digital levelling for permanent monitoringmotorised digital levelling for permanent monitoring-- hydrostatic systemshydrostatic systems
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Permanent Monitoring with Motorised Digital LevelsPermanent Monitoring with Motorised Digital Levels
Solexperts

13
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Hydrostatic systemsHydrostatic systems
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Basic Setup of a Hydrostatic Levelling SystemBasic Setup of a Hydrostatic Levelling Systemp = ρ g h
Height of water column
Glass cylinderwith scale
Metal stand
Valve
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Freiberger Schlauchwaage according MeiFreiberger Schlauchwaage according Meißßerer
Air pressure compensation tube
• Height measure range: 100 mm
• Tube length: 30-50 m
• Accuracy: 0,01 mm
(in closed rooms)
±
Variables:circular level
Screw for levelling
Probe tip
mm-scale
Stop Valve
centeringplug gauge
System specific errors:
• Capillary forces
• Vibrations of fluid-column
• Fluid-viscosity
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
““AachenerAachener SchlauchwaageSchlauchwaage””
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
HLSHLS
x y
zPrecise levelling – low tiltFluid velocity – slow movements
Technical Data:Range: ± 2,5 mmResolution: 0.001 mmAccuracy: 10 µm
Option for self-calibration by development of a newly defined touchpoint ( ≈11 mm)
No linear correlation between the fluid‘s height and the measured signal
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
First LAS Instrument First LAS Instrument -- „„AlbignaAlbigna““
Lake side vessel
(adjustable)
25cm Valley side vesselCentral Unit
for several inputs

14
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
HSDM HSDM ––DifferetialDifferetial Pressure SystemPressure System
Lake Valley
Membrane UnitNormal
Zero
Inverse
Line No. 1
Line No. 2
Line No. 3
Measurement setup for calibration process
Target: Determination of residual deflectionDetermination of long-time-drift of differential-pressure-sensor
no manipulation of the system after installation remote control
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Measurement Setup: Slope Movement MMeasurement Setup: Slope Movement Müünster Baselnster Basel
1234
5
JIHGF
9 8 7 6
10
A B C D E
flussaufwärts flussabwärts
Rutschgebiet
stabilesTerrain
stabilesTerrain
Technical data
Range: +/-500 mmAccuracy: 0.1mm Max. number of sensors : 12
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
The magnetic switching system integrated in the CPU switches on each measurement container to the difference pressure sensor.
multiple measurement lines
independent on other lines (yellow)
dependent on other lines (red)
new developmentof the system
One differential pressure sensor
Multiple Lines Measurement SetupMultiple Lines Measurement Setup
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Hydrostatic Measurement Method LAS (Large Area Settlement)Hydrostatic Measurement Method LAS (Large Area Settlement)
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Hydrostatic Levelling SystemsHydrostatic Levelling SystemsParticle accelerator DESY Hamburg
Supersonic emitter linked to a floater integrated and mechanically stable calibration distances
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Transfer functionTransfer function–– Time ConstantsTime Constants
5 cm1
2

15
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
40
60
80
100
120
140
160
180
200
17:13:55 17:16:48 17:19:41 17:22:34 17:25:26 17:28:19 17:31:12 17:34:05
5 cm movement with 30 m pipe
5 cm movement with 3 m pipe
Sampling rate = 4 sec.
Swinging BehaviourSwinging Behaviour –– Time ConstantsTime Constants
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Application of LAS/HSDMApplication of LAS/HSDM
Building deformationTunneling
Soil compressionDisposal / DumpsiteRecultivation
Slope movement
Cuolm da vi
0
Deformation monitoring system CHAPF
Deformation monitoring on the bottom of the Albigna dam
Deformation monitoring of Münsterhügel in Basel (moving slope)
Deformation monitoring of soil when tube laying using construction and agricultural machines
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Direction transferDirection transfer
-- GyrotheodolitesGyrotheodolites
-- Inertial Navigation Systems Inertial Navigation Systems
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Direction TransferDirection Transfer in the in the SedrunSedrun ShaftShaft
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
-5
-4
-3
-2
-1
0
1
2
3
-10 0 10 20 30 40[Temperatur C0]
UNIBW
[mGon]
Temperature Problem with Gyroscope Temperature Problem with Gyroscope TachTacheoeometersmeters
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Direction transfer in the Sedrun shaft Increase of reliability in tunnelling
Test measurement over two days during the diploma course(ETH) for surveying in 1999
Gyroscope MeasurementsGyroscope Measurements

16
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
10.012.014.016.018.020.022.0
Diff
eren
z in
mgo
n
3.5 mgon
21.7.99 28. / 29.7.99
Gyroscope MeasurementsGyroscope Measurements
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Inertial Measurement SystemInertial Measurement System
• 3 orthogonal acceleration indicators
• 3 orthogonal gyroscopes• Coaxial arrangement• Processing unit
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Inertial Measurement SystemInertial Measurement System
Resolution 0,1 mgon Drift 0,0020/h
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Considerating the rotation amount of earth
Situation of the Inertial System to the Axis of the EarthSituation of the Inertial System to the Axis of the Earth
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Measurement SetupMeasurement Setup
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Measurement Setup in Measurement Setup in thethe ConveyorConveyor
17
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Measurement Setting Measurement Setting (Dissertation Neuhierl, 2005)(Dissertation Neuhierl, 2005)
shaftconveyormounting-
plate
Adapting mirror
mirror
GAP
IMU
long-distance target location
βo
αo
top
top
αu
βu
bottom
bottom
ψ
Direction angle:tu = to + βo + αo + ψ – (βu + αu)
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Measurement ProcessMeasurement Process
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Dam Monitoring Nalps since October 2000Dam Monitoring Nalps since October 2000
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
MultisensorMultisensor systems with data systems with data aquisitionaquisition, , preprocessingpreprocessing, data, data--transfer,transfer, processing, calculationprocessing, calculation
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Requirements for a Surveying System (GeoMonitor)Requirements for a Surveying System (GeoMonitor)
data acquisition data file managementreal-time numeric and graphic data displayinstrument configuration and control, including operation of motion-control motorsfor digital levels and total stationsreal-time compensation and other complex calculationsalarm definition and controlautomatic reports of desired datamonitoring activity logoptional: Remote Control Softwareallows communication and control of the system from an off-site location with these advantages:
convenient access to current and earlier data from any locationenables scheduled automatic transfers of up-to-the-minute data to remote officeseasy remote system control and configurationenables quick reactions to changing site conditionsenables backup of data to remote computers
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Components of GeoMonitorComponents of GeoMonitor
18
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
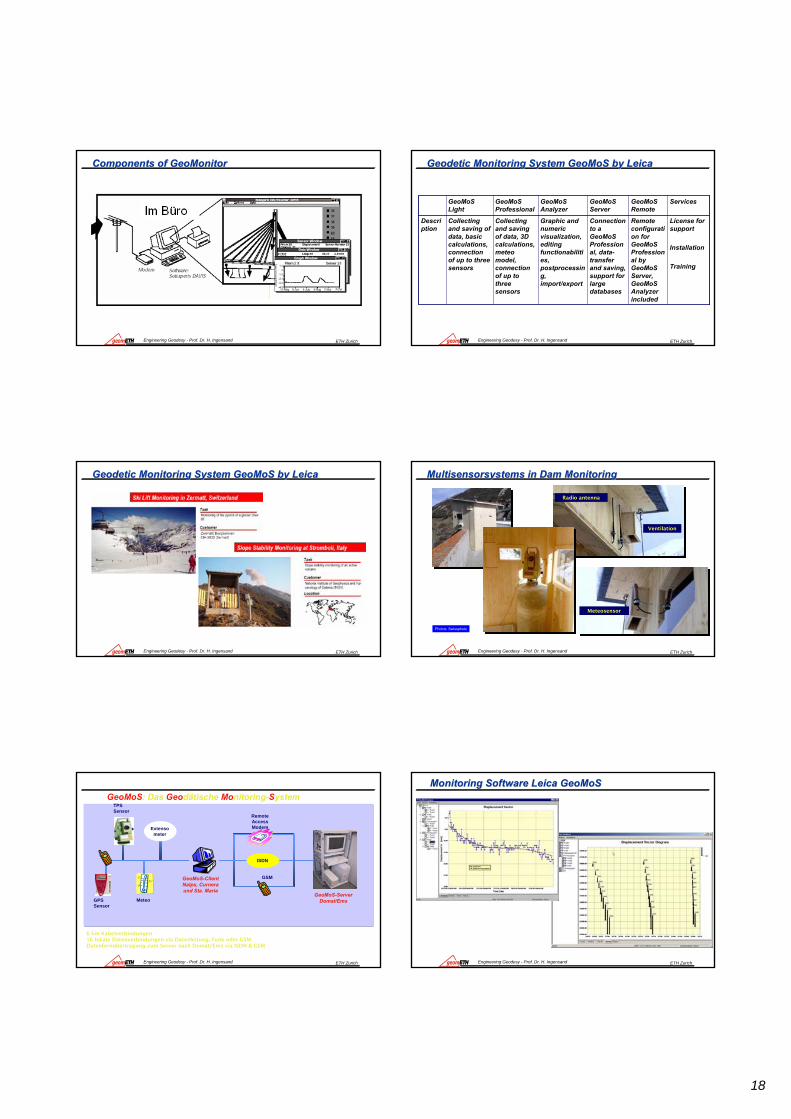
Components of GeoMonitorComponents of GeoMonitor
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Geodetic Monitoring System GeoMoS by LeicaGeodetic Monitoring System GeoMoS by Leica
License for support
Installation
Training
Remote configuration for GeoMoS Professional by GeoMoS Server, GeoMoS Analyzer included
Connection to a GeoMoS Professional, data-transfer and saving, support for large databases
Graphic and numeric visualization, editing functionabilities, postprocessing, import/export
Collecting and saving of data, 3D calculations, meteo model, connection of up to three sensors
Collecting and saving of data, basic calculations, connection of up to three sensors
Description
ServicesGeoMoS Remote
GeoMoS Server
GeoMoS Analyzer
GeoMoS Professional
GeoMoS Light
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Geodetic Monitoring System GeoMoS by LeicaGeodetic Monitoring System GeoMoS by Leica
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Radio antenna
Meteosensor
Ventilation
Photos: Swissphoto
MultisensorsystemsMultisensorsystems in Dam Monitoringin Dam Monitoring
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
GPSSensor
TPSSensor
Meteo
Extensometer
GeoMoS-ClientNalps, Curneraund Sta. Maria
GeoMoS-ServerDomat/Ems
ISDN
RemoteAccessModem
GSM
6 km Kabelverbindungen16 lokale Datenverbindungen via Datenleitung, Funk oder GSMDatenfernübertragung zum Server nach Domat/Ems via ISDN & GSM
GeoMoS: Das Geodätische Monitoring-System
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Monitoring Software Leica Monitoring Software Leica GeoMoSGeoMoS

19
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
TU Munich SystemTU Munich System
TS 24 – MeasurementKarl Foppe, Wolf Barth and Sebastian PreisAutonomous Permanent Automatic Monitoring System with Robot-Tacheometers (0415)Shaping the ChangeXXIII FIG CongressMunich, Germany, October 8-13, 2006
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
GPSSensor
TPSSensor
Meteo
Extensometer
GeoMoS-ClientNalps, Curneraund Sta. Maria
GeoMoS-ServerDomat/Ems
ISDN
RemoteAccessModem
GSM
6 km cable connection16 local data connection via dataline, radio or GSMLong distance transmission (transfer) to server in Domat/Ems via ISDN & GSM
GeoMoS: Geodetic Monitoring System (Leica)GeoMoS: Geodetic Monitoring System (Leica)
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
SolexpertsSolexperts
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Metrology OverviewMetrology Overview
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Overview: Geodetic Metrology MethodsOverview: Geodetic Metrology Methods
Change of direction only, problem of coupling, just one distance
Permanent; no refraction influence
< 1/100 mmChange of distanceDistance measuring0-5 m
Just one distance; refraction influence
Permanent; reflectorless for suitable surfaces and angles
1/10 mmDistance, change of distance
Distance measuring5-2000 m
Time intensive installation, problem of coupling, influence of temperature
No refraction influence, permanent
1/100 mmRelative changes of the local z-coordinate
Hydrostaticheight measurement
No automation with optical levels, refraction influence
Simple; perpendicular relation independent of object
1/100 mmChanges of the local z-coordinate;
Levelling
DisadvantagesAdvantagesResolutionGeometric information
Metrology methods
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Overview: Geodetic Metrology MethodsOverview: Geodetic Metrology Methods
Depends on the Surface parameteres,postprocessing
ReflectorlessMeasurementsHigh sampling rate
1-3 cm
1 mm
Pointcloud- Surface models
Laser ScanningMicrowave InterferometryPhotogrammetry
Free sight to satellites, transformation of parameters necessary for linking with other data
„Real-time“ – analysis possible with fix-installation
1 mm x,y3 mm z
Global 3D-coordinates in WGS84-system
3D-coordiantes designationGPS (differential phase measuring)
Refraction; needs reference points
Independent of superior systems; „Real-time“-analysis, simple target points (reflectors, reflex foils)
<1 mgonDirection- and distance changes → local 3D-coordinates
Vector measuringTotal stationElectronic tacheometer
Problem of couplingPermanent, perpendicular relation
< 1“ (0.3 mgon)
Rotation around x- or y-axis
Tilt meterInclinometerBorehole-Inclinometer
DisadvantagesAdvantagesResolutionGeometric information
Metrology methods

20
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Overview: Geodetic Metrology Methods Overview: Geodetic Metrology Methods
Refraction (optical)Related to a physical value1:500Transfer of Local verticalPlumbing- optical plumbing- mechanical plumbing
Refraction (optical)0,01 mmDeviation of a lineAlignment-Optical alignement- Mechanical alignment
Temperature Drifts complicated calibration
Independent from reference points
dmPosition, RotationsInertial Navigation Systems
TemperatureDrifts
Related to a physical Direction
1,3 mgonDirection related to the Rotation axis of the Earth
GyroscopAzimuth finding systems
DisadvantagesAdvantagesResolutionGeometric information
Metrology methods
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Overview: Geodetic Metrology Methods for Slope InstabilitiesOverview: Geodetic Metrology Methods for Slope Instabilities
Surface propertiesDoes not work on vegetated surfaces
High resolutionmmInterferometric patternRadar Interferometry
Temperature Drifts complicated calibration
Independent from reference points
dmPosition, RotationsInertial Navigation Systems
TemperatureDrifts
Related to a physical Direction
1,3 mgonDirection related to the Rotation axis of the Earth
GyroscopAzimuth finding systems
DisadvantagesAdvantagesResolutionGeometric information
Metrology methods
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Beaconing, Centering Systems, Reference PointsBeaconing, Centering Systems, Reference Points
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
CenteringCentering System WildSystem Wild
Zentrierbolzen und Zentrierkugel Pfeilerplatte mit Zentrierstift
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Wild Wild 5/85/8”” Gleisvermessung
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand

21
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Zentrierplatten Zentrierplatten -- KernKern
Einbetonierte Zentrierplatte, Kern Zentrierplatte auf Pfeilergrungplatte
Pfeiler mit Lochbolzen und Fussplatten
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
SBB SBB BolzenBolzen
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Zentrierflansch an KernZentrierflansch an Kern--ZentrierplatteZentrierplatte und mit beleuchteteund mit beleuchteter r ZielmarkeZielmarke
Staumauer Gigerwald
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
MesspfeilerMesspfeiler
22
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
MesspfeilerMesspfeiler
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Prismen auf Pfeilern
Doppel-wandige
Betonpfeiler
z.T. mitDoppelprisma
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Reflector Mounting (?)Reflector Mounting (?)
?
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
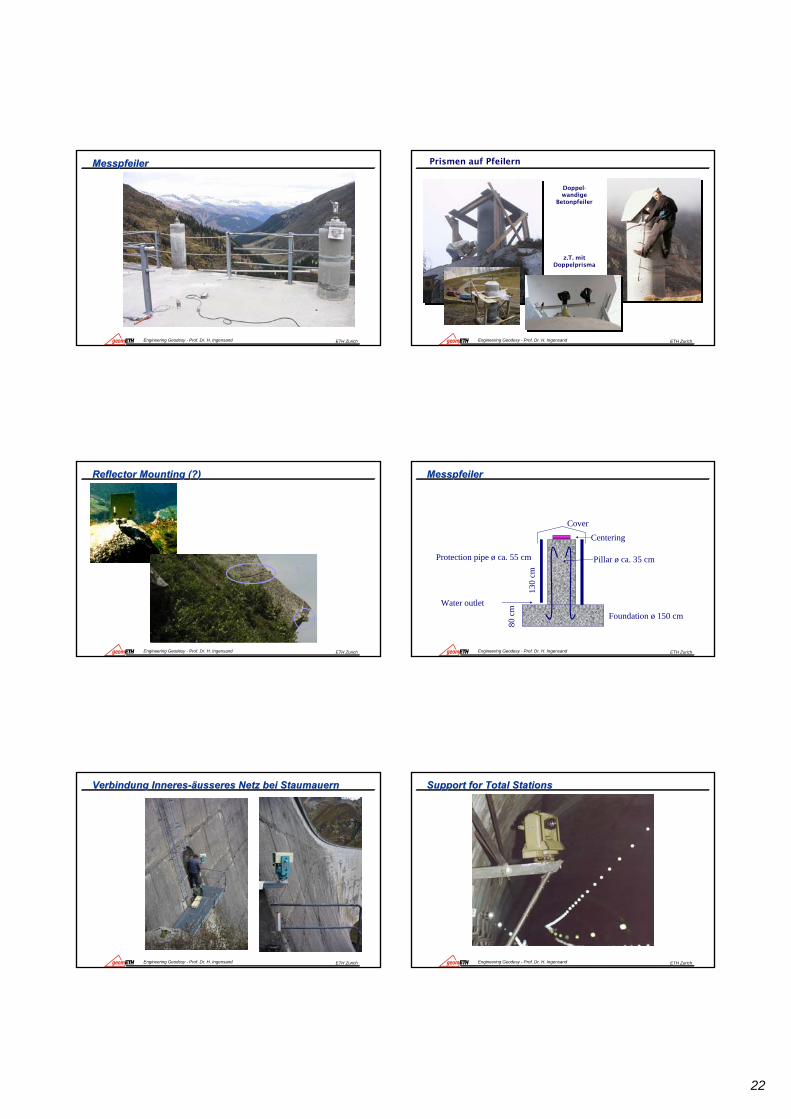
MesspfeilerMesspfeiler
CoverCentering
Pillar ø ca. 35 cmProtection pipe ø ca. 55 cm
Water outletFoundation ø 150 cm
130
cm
80 c
m
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Verbindung InneresVerbindung Inneres--ääusseres Netz bei Staumauernusseres Netz bei Staumauern
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Support for Total StationsSupport for Total Stations

23
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Support (Support (SolexpertsSolexperts))
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
LotungszielmarkeLotungszielmarke
Kern
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
BodenpunkteBodenpunkte
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
ENDEND

24
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Geodetic metrology
Geotechnical metrology
Geophysical metrology
Remote sensing Other methods
System of the Measuring DisciplinesSystem of the Measuring Disciplines
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Automatic Monitoring of an unstable Slope in Automatic Monitoring of an unstable Slope in LauterbrunnenLauterbrunnen ValleyValley
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Only relative change; difficulty of docking; only one distance
Permanent; no refraction effect
< 1/100 mmDistance changeDistance finding 0-5 mExtensometerInterferometer
Only one distance; refraction effect
Permanent; for suitable surfaces and angle of impact also contact-free
1/10 mmDistance, Distance change
Distance finding 5-2000 mElectronic Distancemeter
Demanding installation; difficulty of docking, effect of temperature
No refraction effect, permanent
1/100 mmRelative change of the local z-coordinate
Hydrostatic height measuringTube balanceElectronic hydrostatic measuring system
With optical leveling instruments no automation, refraction effect
Simple; independent reference to the vertical
1/100 mmChange of the local z-coordinate; with digital leveling instruments also horizontal translations
LevelingLeveling instrumentDigital leveling instrument
DisadvantageAdvantagesResolutionGeometrical information
MetrologyInstruments
Overview: Geodetic Measurement of Slope InstabilityOverview: Geodetic Measurement of Slope Instability
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Post processing1000 of points, contact less
1 cmPoint cloudLaser scanning
Free sight to satellites, transformation parameters for connection several measurements required
No requirement of reference points, „Real-time“ – analysis for fixed installation possible
1 mmGlobal 3D-coordinate in WGS84-System
3D-coordinate determination GPS (differential phase measuring)
Refraction; reference points required
Independent from superior systems; „Real-time“-analysis, simple points of aim (reflectors, reflex foil)
1 mgonDirection and distance changes → local 3D-coordinates
Vector measuringTotal stationElectronic tacheometer
DockingPermanent, reference to the vertical
< 1“(0.3 mgon)
Rotation around x- or y-axis
InclinometeryInclinometerDrill hole inclinometer
DisadvantageAdvantagesResolutionGeometrical informationMetrologyInstruments
Overview: Geodetic Instruments SensorsOverview: Geodetic Instruments Sensors
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Levelling System with HalfLevelling System with Half--Filled PipeFilled Pipe
Hydrostatic Levelling SystemGroup of high-precision hydrostatic measurement systems, applied for world-wide electron accelerator monitoring
• half-filled pipe• Gravity related• capacitive measurement of fluid height
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Bautechnik
Baustoffe & Materialien
Komplexität !
Spezialisierung
Schliessen von Baulücken
Kurze Bauzeiten
Qualitätssicherung
Trends im Bauwesen

25
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand
Präzisionsarbeituntertage
ETH ZurichEngineering Geodesy - Prof. Dr. H. Ingensand






![01 Introduction.ppt [Kompatibilitätsmodus]webarchiv.ethz.ch/geometh-data/student/eg1/2009/01_Introduction.pdf · surveying (Geometerpatent) Engineering Geodesy - Prof. Dr. H. Ingensand](https://static.fdocuments.in/doc/165x107/605cac50efff0a77ec63c26b/01-kompatibilittsmoduswebarchivethzchgeometh-datastudenteg1200901introductionpdf.jpg)


