
Measurements of Vector Magnetic Fields
45
1 Measurements of Vector Magnetic Fields Jiang-Tao Su and Hong-Qi Zhang National Astronomical Observatories Chinese Ac ademy of Sciences
-
Upload
ezra-quinn -
Category
Documents
-
view
35 -
download
1
description
Jiang-Tao Su and Hong-Qi Zhang National Astronomical Observatories Chinese Academy of Sciences. Measurements of Vector Magnetic Fields. Outline. Foundation for measuring of vector magnetic fields ----Zeeman effect Magnetogram data reduction Calibrations for vector magnetic fields - PowerPoint PPT Presentation
Transcript of Measurements of Vector Magnetic Fields

1
Measurements of Vector Magnetic Fields
Jiang-Tao Su and Hong-Qi Zhang
National Astronomical Observatories Chinese Academy of Sciences

2
Outline
Foundation for measuring of vector magnetic fields ----Zeeman effect
Magnetogram data reductionCalibrations for vector magnetic fields
and Faraday rotation Influence of stray-light on longitudinal magn
etic signal
3
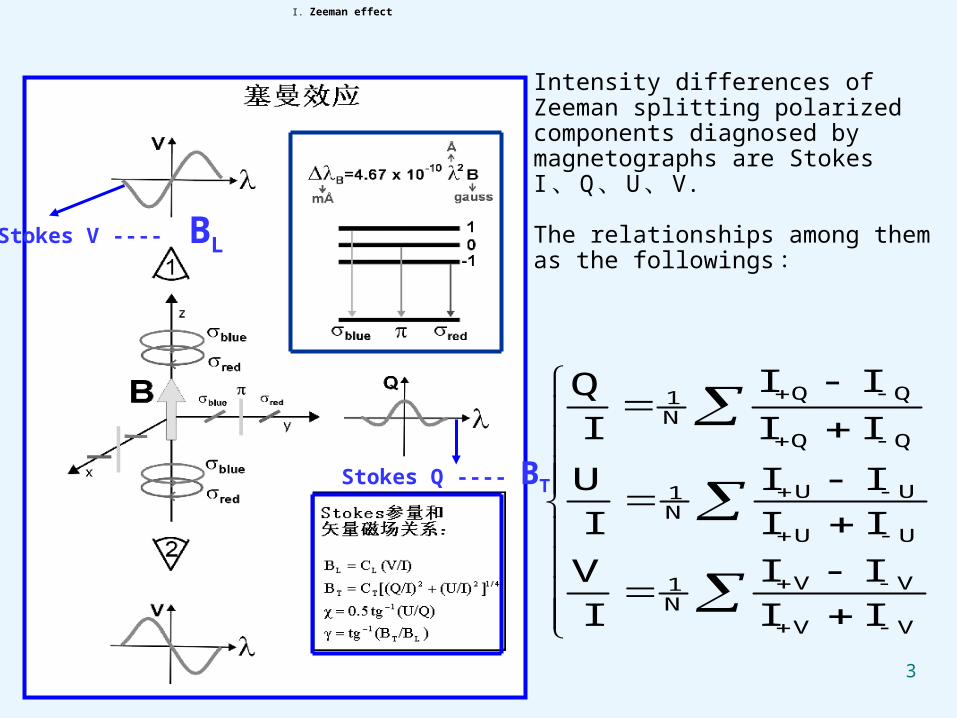
I. Zeeman effect
Intensity differences ofZeeman splitting polarizedcomponents diagnosed bymagnetographs are StokesI 、 Q 、 U 、 V.
The relationships among them as the followings :
VV
VVN1
UU
UUN1
QQN1
II
II
I
V
II
II
I
U
II
II
I
Q
Stokes V ---- BL
Stokes Q ---- BT

4
Q/I
U/I
V/I
Longitudinal magnetic field BL
Transverse magnetic field BT
Calibrated
Calibrated
Diagnosis of Stokes parameters Q/I, U/I, V/I by Video Vector Magnetograph at Huairou
With line FeIλ5324.19 Å
-0.075 Å
(Zhang 2000)
0.0 Å
0.0 Å

5
II. Magnetogram data reduction
1 、 Linear bias present in Stokes Q/I and U/I
-0.12 Å
-0.12 Å
Estimate of bias in areas outside the AR

6
00325.0/ fitIU
00103.0/ fitIQ
GB fitt 630
Distribution plots
of the U/I and Q/I I
intensities
Transverse field bias distribution
Subtract linear biases from original Stokes Q/I and U/I data:
fittedobs
fittedobs
IUIUIU
IQIQIQ
)/()/(/
)/()/(/

7
Measurements of transverse magnetic fields with
filter tuned to line wings are to be suffered the
affections of cross-talk between circular and
linear polarized lights.
Measurements of transverse magnetic fields with
filter tuned to line center are to be suffered the
more serious affections of Faraday rotations
2 、 Circular-to-linear cross talk

8
b: -0.06Å
r: +0.06Å
)(050.000084.0
)(0149.00036.0
rbrb
rbrb
VVUU
VVQQ
The cross-talk is estimated by making a scatter plot of the difference between the red (r) and blue (b) wings [(Qb-Qr)/I vs. (Vb-Vr)/I, and (Ub-Ur)/I vs. (Vb-Vr)/I] at the ±60 mÅ filter positions, respectively, over the entire field of view.

9
VKCIUIU
VKCIQIQobs
obs
22
1.1
)/(/
)/(/
The formulae for correction
of cross-talk:
Two azimuths observed at ±120mÅ
from the line center
After the cross-talk corrections
Before the cross-talk corrections

10
A explanation for magnitude differences in sunspot umbra region is:
There is the asymmetry in two wings of line FeIλ5324.19 Å in umbra region A rough ratio of polarized signal Q or U at 150mÅ red to at 150mÅ blue is 1.5, estimated from the line of FeIλ5324.19 Å.
The line of FeIλ5324.19 Å in umbra region
11
III. Calibrations of full vector magnetic fields and Faraday rotation
Calibration method: With nonlinear least-square techniques, the observed Stokes V
/I, Q/I and U/I profiles were compared with the model profiles and the parameters of magnetic strength H, inclination γ and azimuth χ were obtained. Then we got the coefficients of CL and CT for longitudinal and transverse components of magnetic field by the approximate relations:
BL=CL(V/I) , BT=CT [(Q/I)2+(U/I) 2] 1/4.

12
Preceding calibration works
Theoretical calibrations of vector magnetic fields (Ai, Li and Zhang, 1982)
Empirical calibration by comparison with Kitt Peak data (Ai, 1994-1995)
Calibration of longitudinal magnetic field with observational and empirical methods using Huairou data (Wang, Ai and Deng, 1996)
8882;9606 LELO CC
9730;101 4 TL CC
13
The Stokes profiles data were obtained on 2002-10-24 and 2003-10-23, with the HSOS vector magnetograph for two relativesimple sunspots of AR 10162 (N26 E04) and AR 10484 located (N04 E12.4). The former data are used to diagnose the Faraday rotation the latter data to calibrate vector magnetic fields.
The spectral scan data were Stokes images extending from 150mÅin the blue wing to +150mÅ in the red wing of the FeIλ5324.19 Åline at steps of 10mÅ.
The standard deviation data were Stokes images observed at ±60mÅ from the line center.
Observed data (Stokes profiles)

14
Analytical solutions for Stokes parameters
Landolfi & Landi Del’Innocenti (1982)
])1[(
]))(1()1[(
]))(1()1[(
]})1)[(1{(
2
2
2
22220
1
1
1
1
RV
RU
RQ
BI
VVIB
UQVVQIUIB
QVUUVIIB
VUQIIB
222222222 ])1[()1( RVUQVUQII
VVUUQQR
15
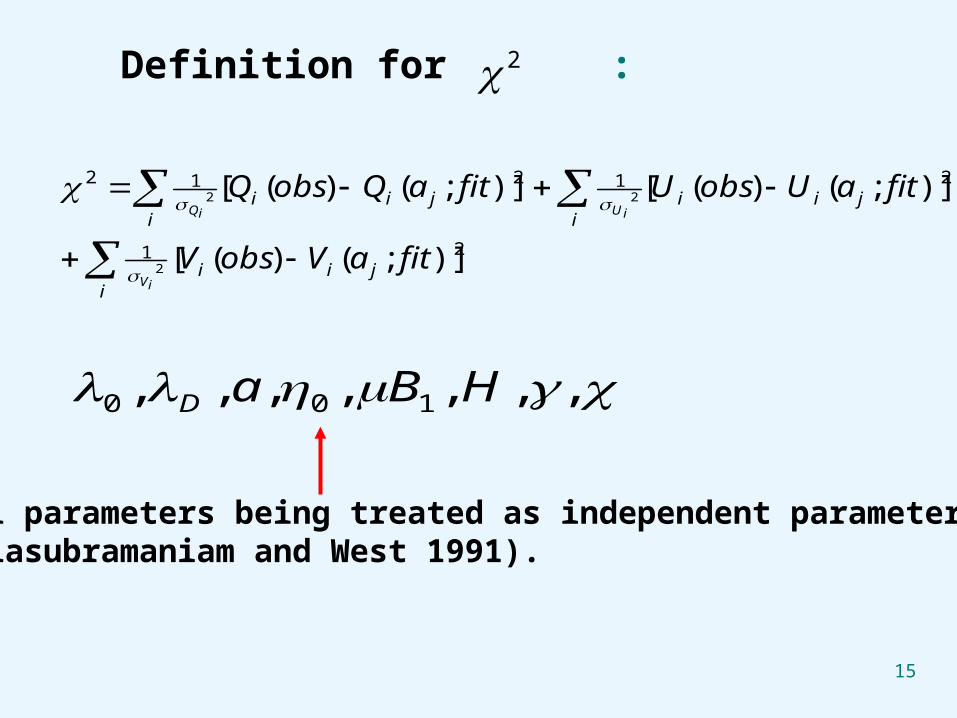
Definition for :2
ijii
jiii
jiii
fitaVobsV
fitaUobsUfitaQobsQ
iV
iUiQ
21
21212
)];()([
)];()([)];()([
2
22
,,,,,,, 100 HBaD
All parameters being treated as independent parameters(Balasubramaniam and West 1991).

16
Sunspot filtergram
of AR 10162
Map of the sunspot’s filtergram showing radii
and circles for the selection of the pixels used in
the analysis (Hagyard, et al. 2000).
**
*
*
****
Azimuth rotation>60º
*
Azimuth rotation about 40º
*
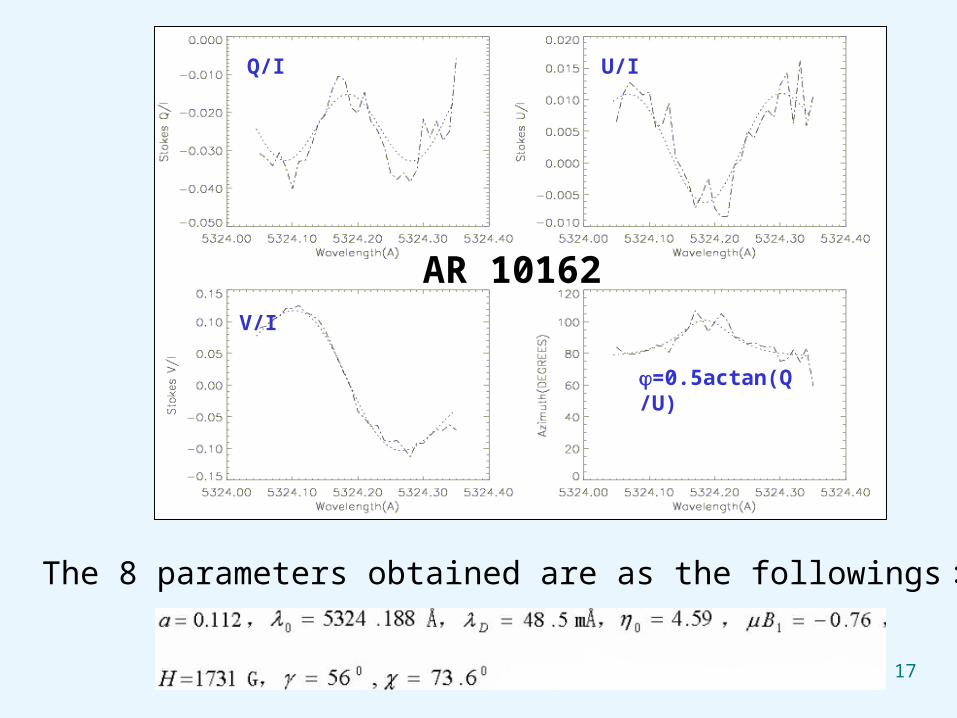
17
Q/I U/I
V/I
=0.5actan(Q/U)
The 8 parameters obtained are as the followings :
AR 10162
18
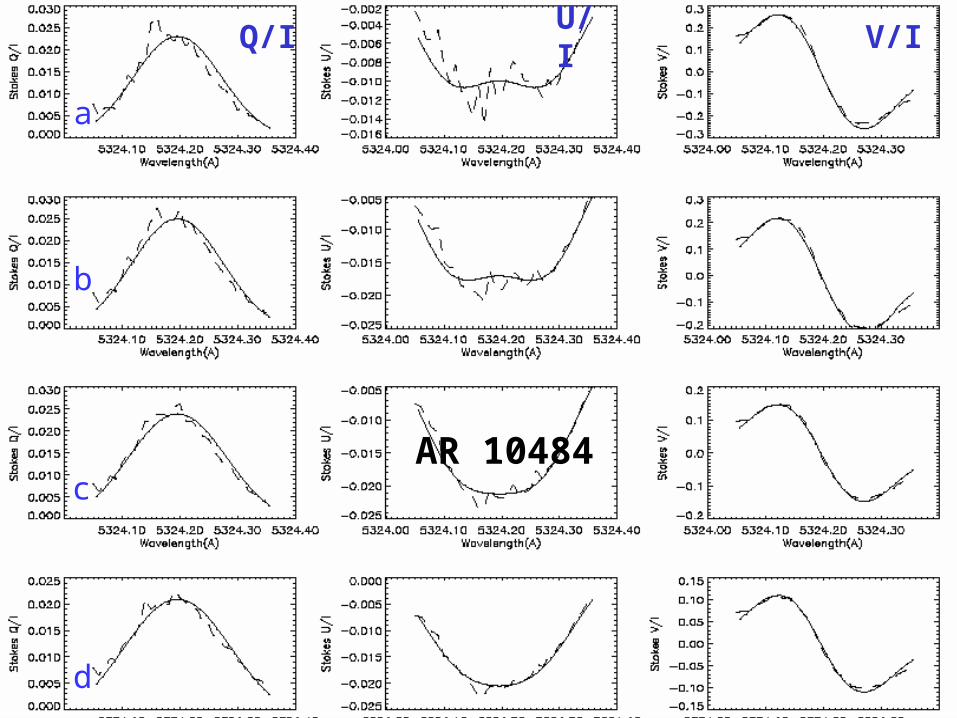
a
b
c
d
Q/I U/I V/I
AR 10484
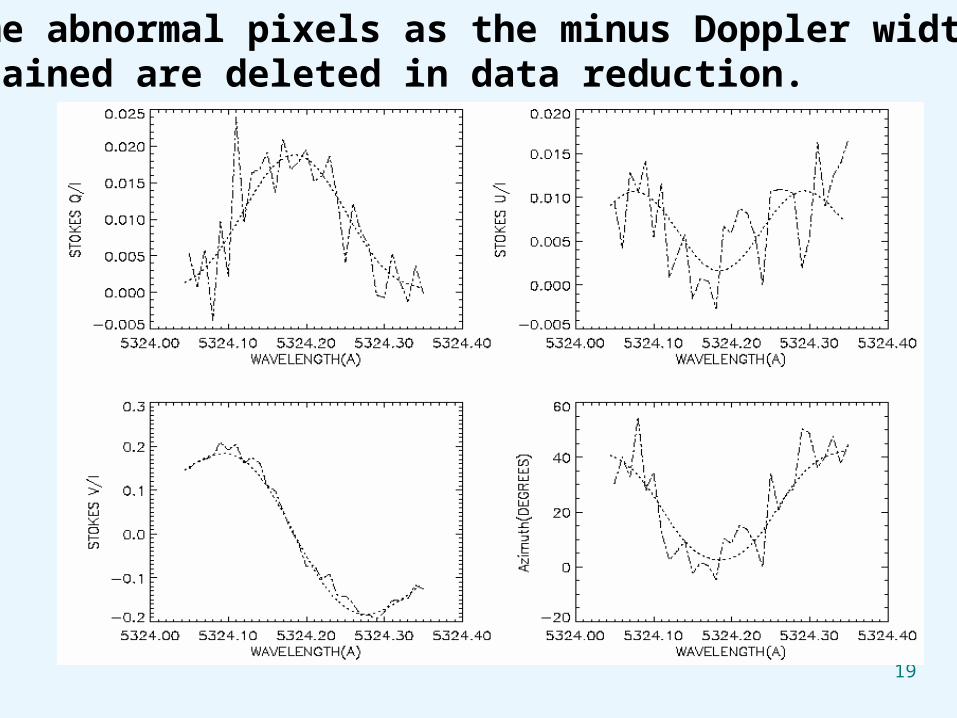
19
Some abnormal pixels as the minus Doppler width obtained are deleted in data reduction.

20
Calibration of transverse field :
Calibrations at the routine observational line positions
Calibrations at line wing -0.12Å
Calibration of transverse field :
Calibration of longitudinal field :
Calibration of longitudinal field :

21
Calibration Coefficients Based on Least-square Fitting
Contents Band-pass location
(Å)Coefficient (G)
BT -0.12 10550±92
# 0.00 6790±52
BL -0.12 10075.5±134.3
# -0.075 8381.0±159.1
22
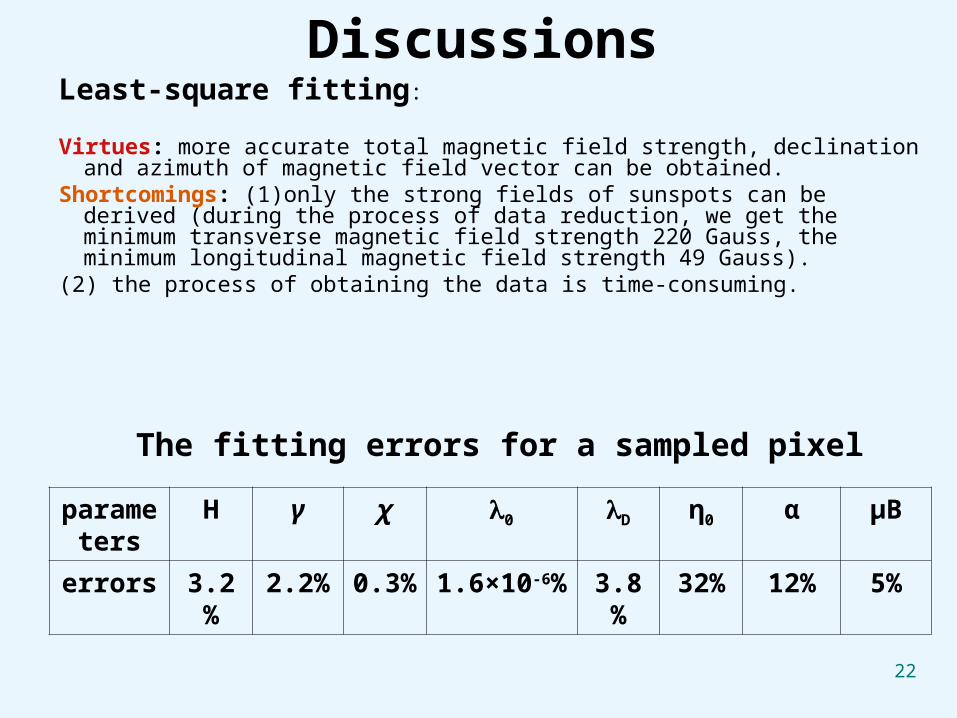
Least-square fitting:
Virtues: more accurate total magnetic field strength, declination and azimuth of magnetic field vector can be obtained.
Shortcomings: (1)only the strong fields of sunspots can be derived (during the process of data reduction, we get the minimum transverse magnetic field strength 220 Gauss, the minimum longitudinal magnetic field strength 49 Gauss).
(2) the process of obtaining the data is time-consuming.
Discussions
The fitting errors for a sampled pixel
parameters
H γ χ 0 D η0 α μB
errors 3.2% 2.2% 0.3% 1.6×10-6% 3.8% 32% 12% 5%

23
Orientations of three linearly polarized light (nбL , nπ , nбR)
1/2tg-1 ( U/Q )
Rotation of polarization
direction
Relative retardation
Top of solar atmosphere
Faraday rotation
Azimuth of magnetic field
1/2tg-1 ( U’/Q’ )Orientations of three linearly polarized
components (nбL , nπ , nбR)
1/2tg-1 ( U’/Q’ )
Diagnostic of magnetograph
Azimuth difference
Δ =ф-ф’
Propagation
Faraday rotation

24
A controversy on Faraday rotation
Hagyard, et al. (2000) found that Faraday rotation of azimuth will be a significant problem in observations taken near the center of a spectral line for fields as low as 1200 G and inclinations of the fields in the range of 20 º ~ 80 º degree.
Bao, et al. (2000) and Zhang (2000) found a mean azimuth rotation only ~12 º for Huairou transverse field data taken at the center of FeIλ5324.19 Å.
Zhang, et al. (2003), by comparisons of the data from Huairou, Mees and Mitaka observatories, found that there is a basic agreement on the transversal fields. Why is there such controversy on azimuth rotation?

25
π-σ rotation effect
The linearly polarized component at line center is perpendicular to thedirection of the linearly polarized component in the wings. The azimuth will abruptly change 900 obtained with different positions of a spectral line from line wings to line center.
B= 1500 G , γ=30o ,χ=22.5o
Azi
mut
h ф
Wavelength
We cannot separate the two effects (Hagyard et al. 2000). So the combination effect of them affects the measurements of azimuth of magnetic field vector.

26
o5.364
=0.
5act
an(Q
/U)
o902,1 o5.1433
centerlineinput _
3.π-σand Faraday rotations
1. 、 2. π-σ rotation
4. Elimination of 180º ambiguity
π-σ rotation eliminated partially by convolution
with filter profile

27
The spectral line with a relatively larger Landé factor g has the more possibility to confront “splitting” enlarged due to π-σ rotation effect
The Landé factor g of line FeIλ5324.19 Å is 1.5 and FeIλ5250.22 Å 3. Thus, the former will confront less large (say, > 60º) azimuth rotation
A deduction about azimuth rotation

28
Definition of azimuth rotation : fittedobscenter_line
AR 10162
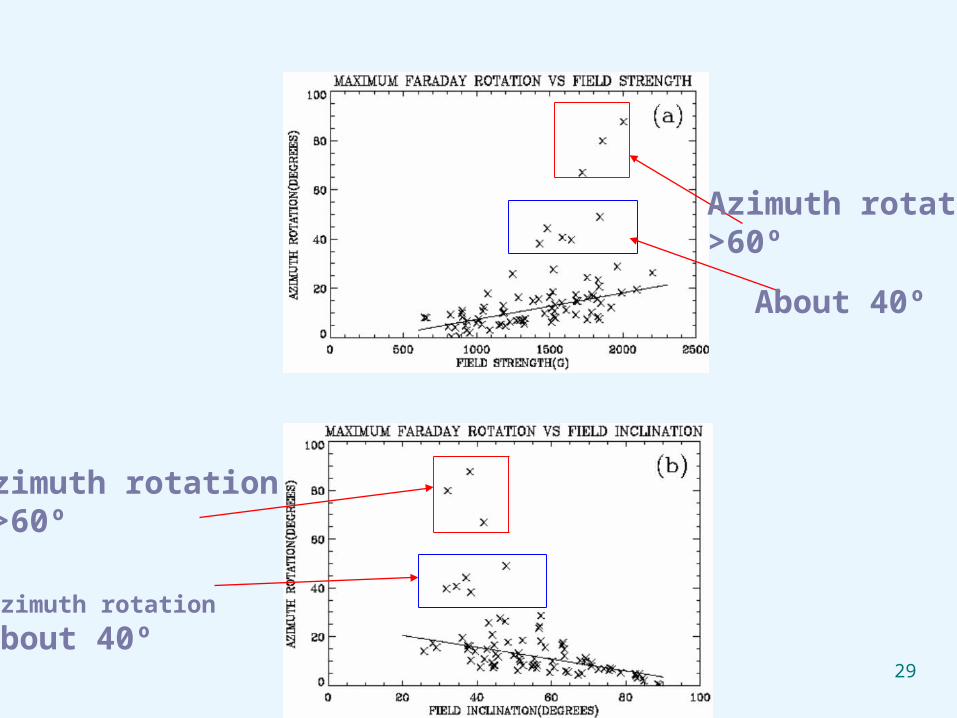
29
Azimuth rotation>60º
About 40º
Azimuth rotation >60º
Azimuth rotation
about 40º

30
31
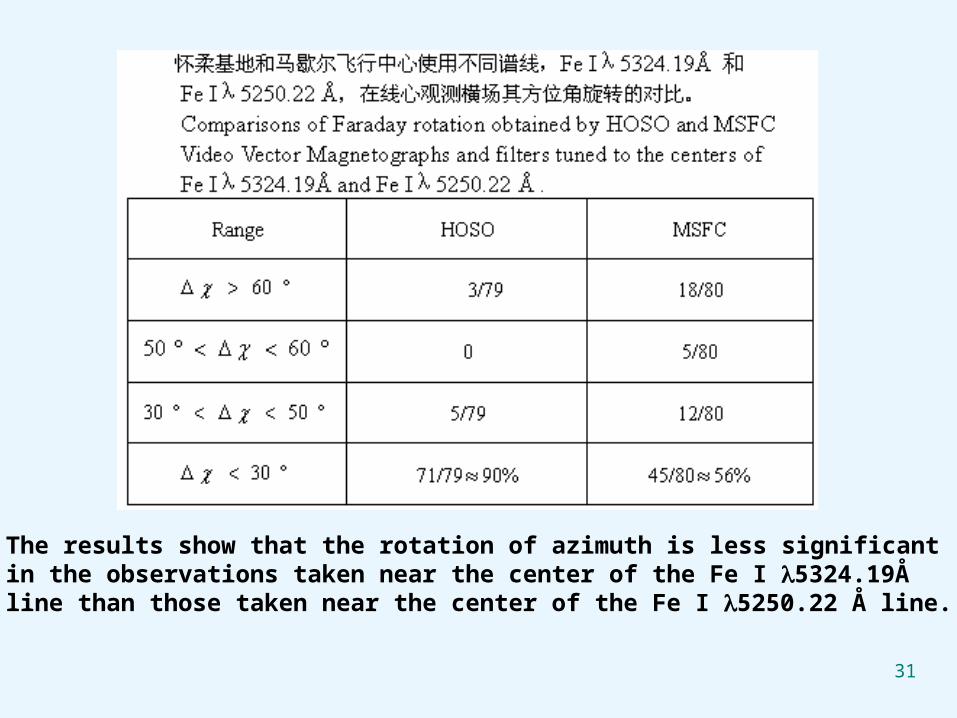
The results show that the rotation of azimuth is less significant in the observations taken near the center of the Fe I 5324.19Å line than those taken near the center of the Fe I 5250.22 Å line.

32
Observational phenomenon
Magnetic signal V/I in umbra center is weaker than that of penumbra. The causes may be: (1) Stray light disturb polarized light. (2) There is serious magnetic saturation effect when measuring magnetic fields in the center of sunspot. (3) There is CCD nonlinear response to weaker polarized light intensity.
VI. Influence of stray-light on longitudinal magnetic signal

33
Employed different solar atmosphere
model , the theoretical calibrating curve
for longitudinal magnetic field (LMF) can
be obtained at -0.75 Å from line center.
Numerical simulation of magnetic saturation
Linear deviation for LMF calibration

34
Numerical simulations show that when BL = 3000 G, the saturation
effect can only cause a maximum error of ~ 6% for the band-pass
position of -0.075 Å to the center of Fe Iλ5324.19 Å.
Moreover, in umbra region, Stokes V/I profiles are approximately
complete and not distorted.

35
So magnetic saturation effect is not the main contributor to this phenomena.
Stray light Stray light include two parts (Martinez Pillet 1992; Chae et al. 1998):
(1) small-spread-angle (SSA) stray light (also named blurring part) caused by atmospheric seeing (affecting scale: several arcsecs) .
(2) large-spread-angle (LSA) stray light (also named scattering part) originating from the instrument and the Earth’s atmosphere (affecting scale: larger than 10 arcsecs).
The observational Stokes I obs image result from spatial re-distributions of disturbance-free Stokes I image :
)1(*I*I)1(I scblobs
)2())((
)(exp
)1()(
22
2
rb
AM
b
ram
r
j jjj
scbl
A point-spread-function (PSF) (SSA part and LSA part) is taken as in the form:
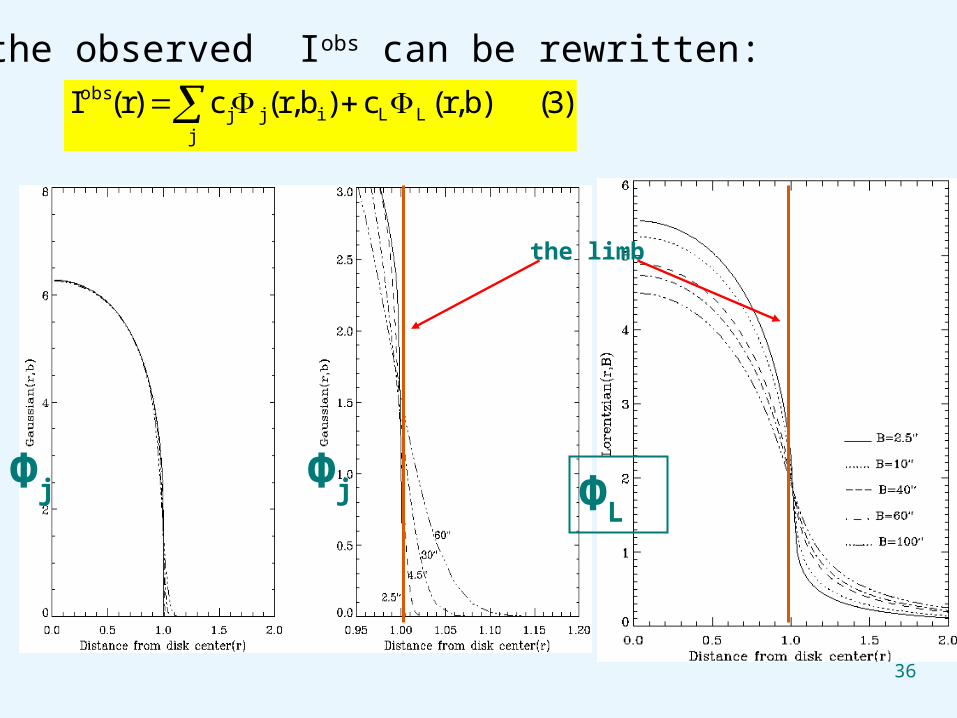
36
So the observed Iobs can be rewritten:)3()b,r(c)b,r(c)r(I LLij
jj
obs
Фj Фj ФL
the limb
37
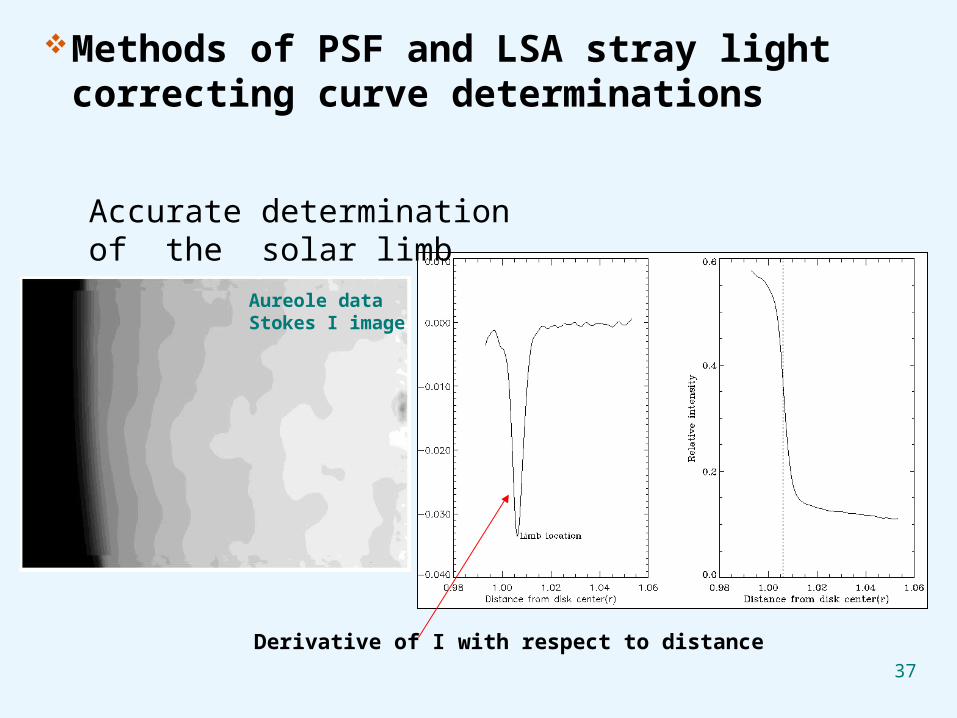
Methods of PSF and LSA stray light correcting curve determinations
Accurate determination of the solar limb
Aureole dataStokes I image
Derivative of I with respect to distance

38
)4()))(()((( 22 i
fittedi
bgiobs
bg rIrI
LSA stray light integral(correcting curve)
Intensity profile across the limb
We make a linear least-square fit to the aureole data
and the chi-square is defined as:
39
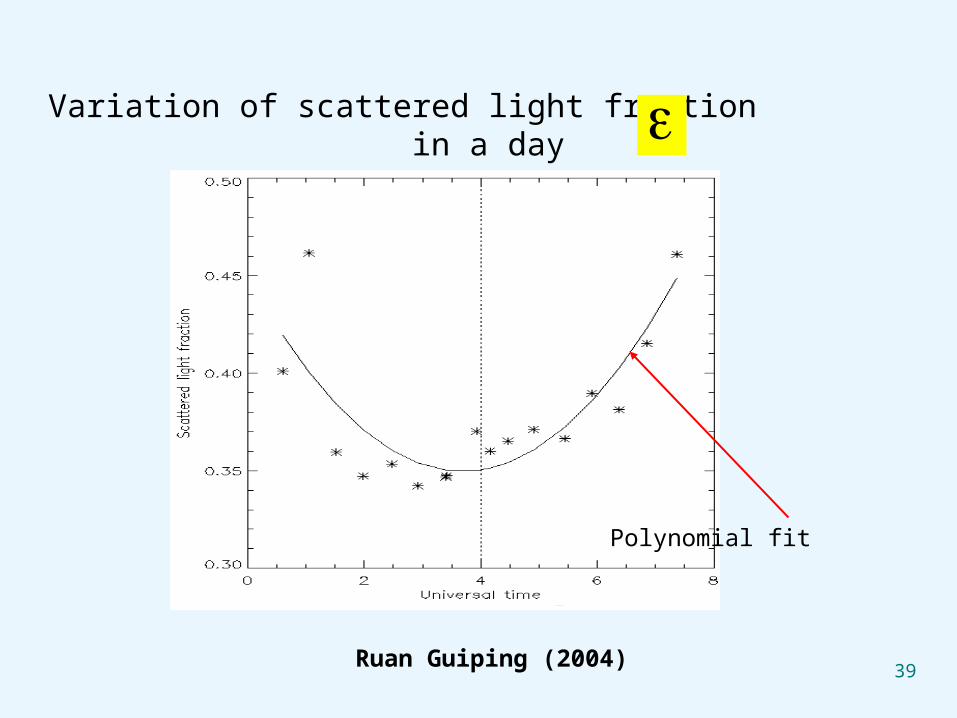
Variation of scattered light fraction in a day
Ruan Guiping (2004)
Polynomial fit

40
In routine observations, what we should first is to subtract stray light intensity
from polarized light intensity, which should be large-spread-angle stray light.
The intensity to be subtracted is named as BLACK LEVEL (BL). However,
it is clear that the stray light intensity near an active region (AR) is not equal
to that of Sun limb.
The intensities of left and right circularly polarized light versus pixel location. IS refers to the actual background noise signal. Ii is a series of BL intensities and i = 1, 2, 3, 4, and 5.
Large-spread-angle stray light correction

41
The magnetic signal V/I can be expressed as:
?2 LSRSi III
)3(2
)2(2
)1(2
,2)(
/
3
4
5
III
III
III
IIIII
IIIIIV
LSRS
LSRS
RSLS
RSLSiLR
LSRSLR
Where IR and IL are right and left circularly polarized light intensities, IRS
and ILS are right and left circularly polarized background noise intensities.
(1)Stokes V/I is smaller than the real value.(2)Stokes V/I is nearly equal to the real value.(3)Stokes V/I is larger than the real value.
In practice, how to select a reasonable BL to make:
42
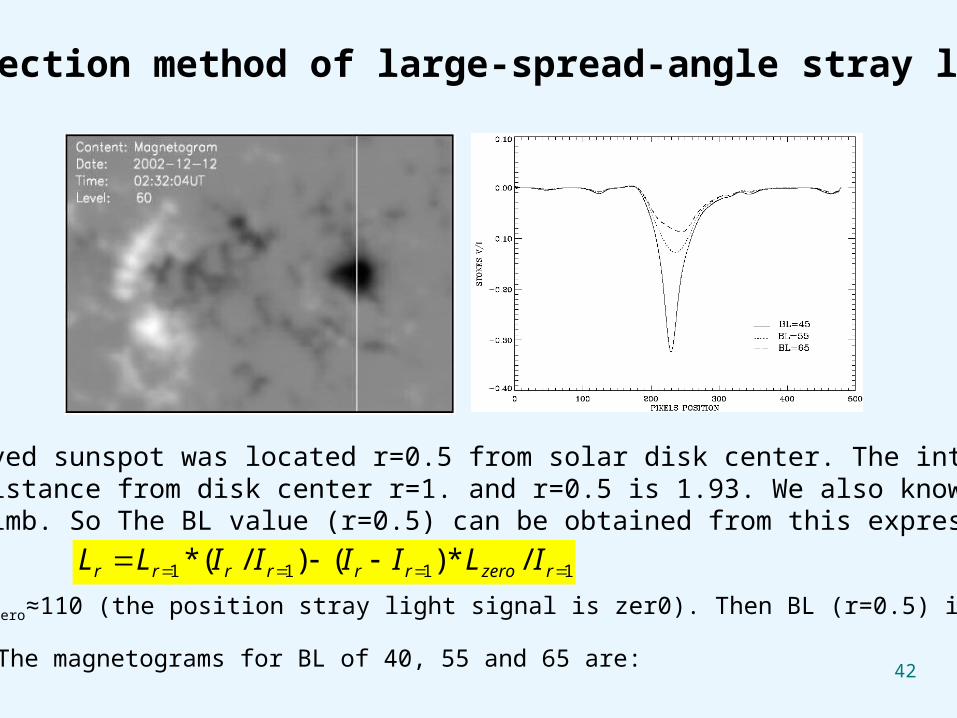
The observed sunspot was located r=0.5 from solar disk center. The intensity ratio between distance from disk center r=1. and r=0.5 is 1.93. We also know BL= 65 in the limb. So The BL value (r=0.5) can be obtained from this expression:
1111 /*)()/(* rzerorrrrrr ILIIIILL
Where L zero≈110 (the position stray light signal is zer0). Then BL (r=0.5) is 43.
The magnetograms for BL of 40, 55 and 65 are:
Correction method of large-spread-angle stray light

43
44
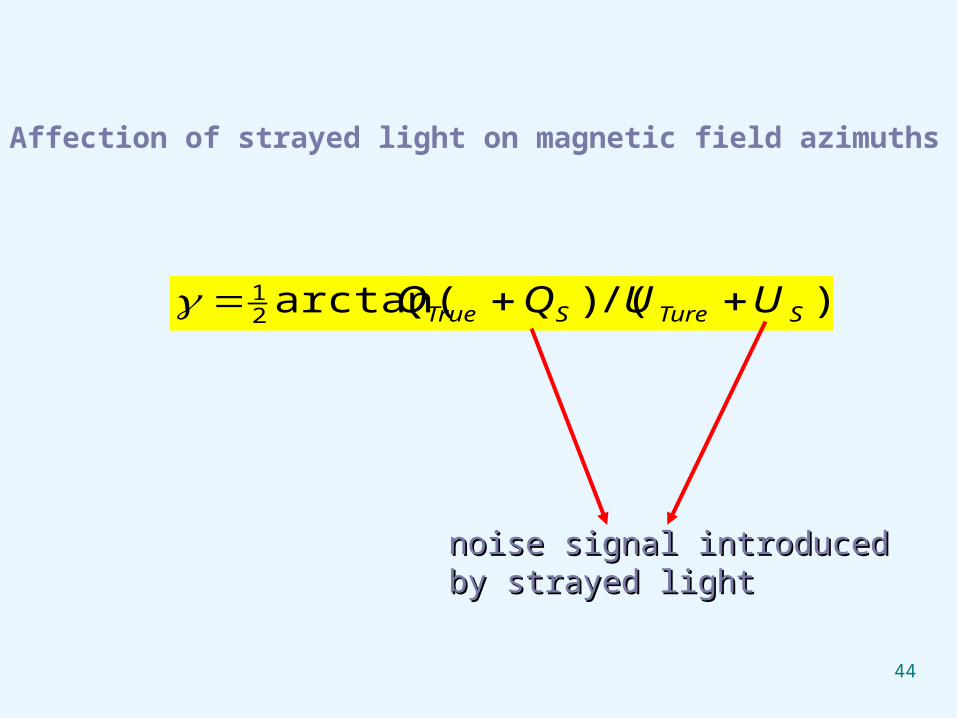
Affection of strayed light on magnetic field azimuths
)/()arctan(21
STureSTrue UUQQ
noise signal introduced noise signal introduced by strayed lightby strayed light

45
Thanks!

















