
ME588 Mechatronics – Integrated Design of Electro ... · Jeff Shelton – 3 February 2015 ......
51
Jeff Shelton – 3 February 2015 = 1 ⋅ 2 + 1 ⋅ 2 + 1 ⋅2 + 1 ⋅ 2 = 1 + 2 ⋅ 1 + 2 ⋅ 1 +2 ⋅ 1 + 2 1
Transcript of ME588 Mechatronics – Integrated Design of Electro ... · Jeff Shelton – 3 February 2015 ......
Jeff Shelton – 3 February 2015
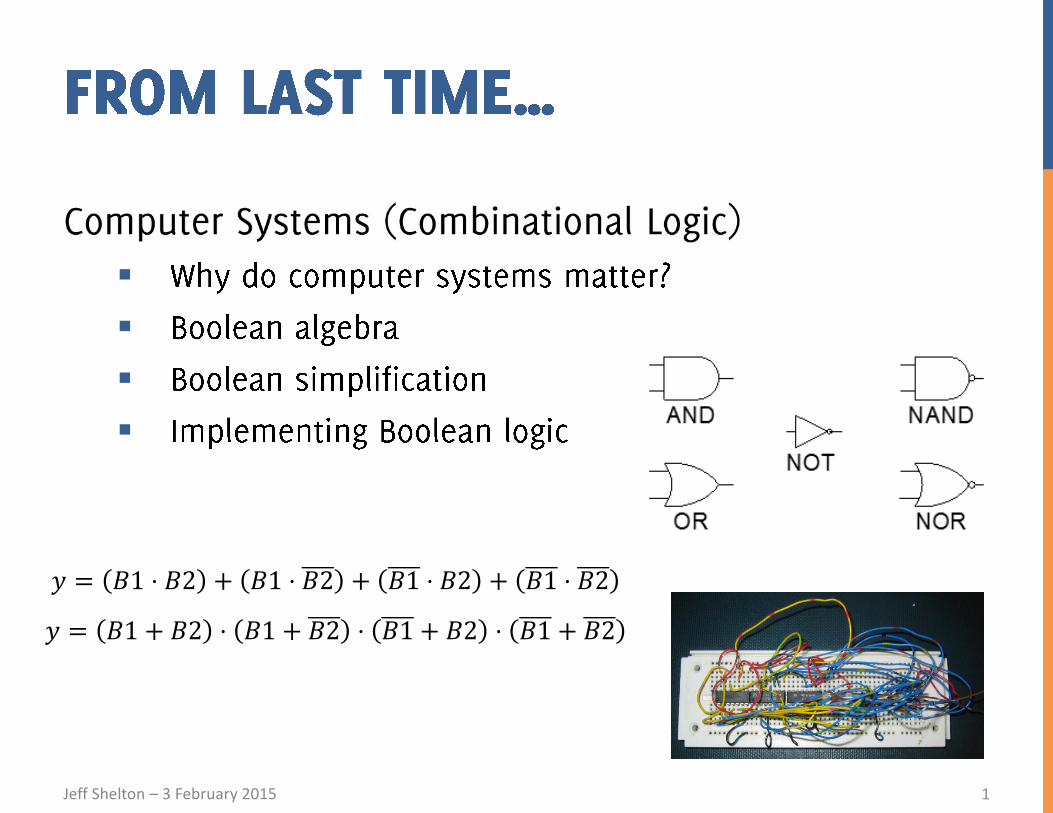
𝑦 = 𝐵1 ⋅ 𝐵2 + 𝐵1 ⋅ 𝐵2 + 𝐵1 ⋅ 𝐵2 + 𝐵1 ⋅ 𝐵2
𝑦 = 𝐵1 + 𝐵2 ⋅ 𝐵1 + 𝐵2 ⋅ 𝐵1 + 𝐵2 ⋅ 𝐵1 + 𝐵2
1

Jeff Shelton – 3 February 2015 2
Jeff Shelton – 3 February 2015 3
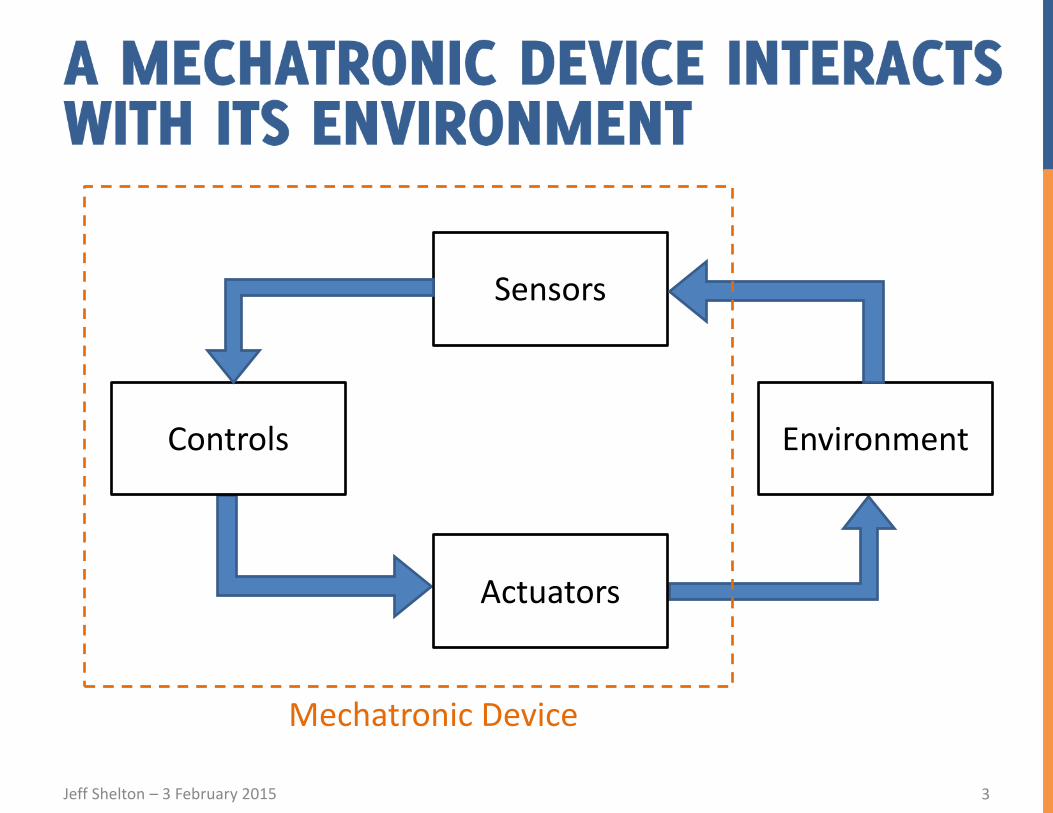
Controls
Sensors
Actuators
Environment
Mechatronic Device
Jeff Shelton – 3 February 2015 4
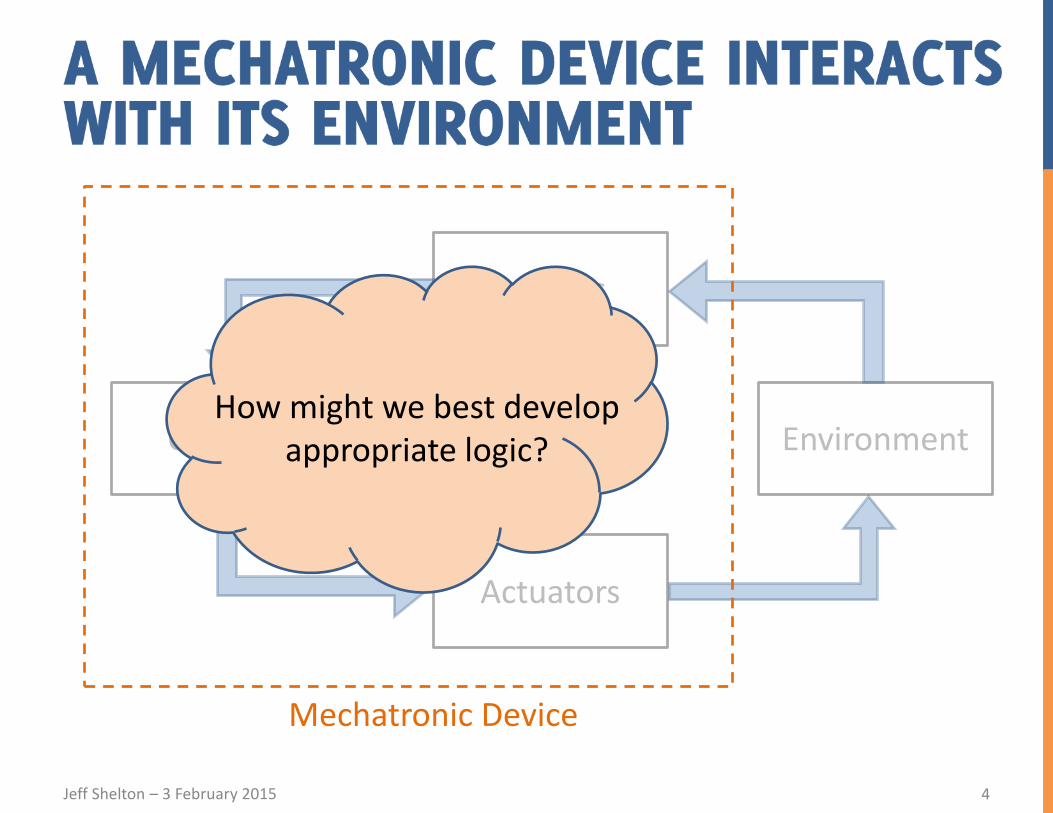
Controls
Sensors
Actuators
Environment
Mechatronic Device
How might we best develop appropriate logic?

Jeff Shelton – 3 February 2015 5
Jeff Shelton – 3 February 2015
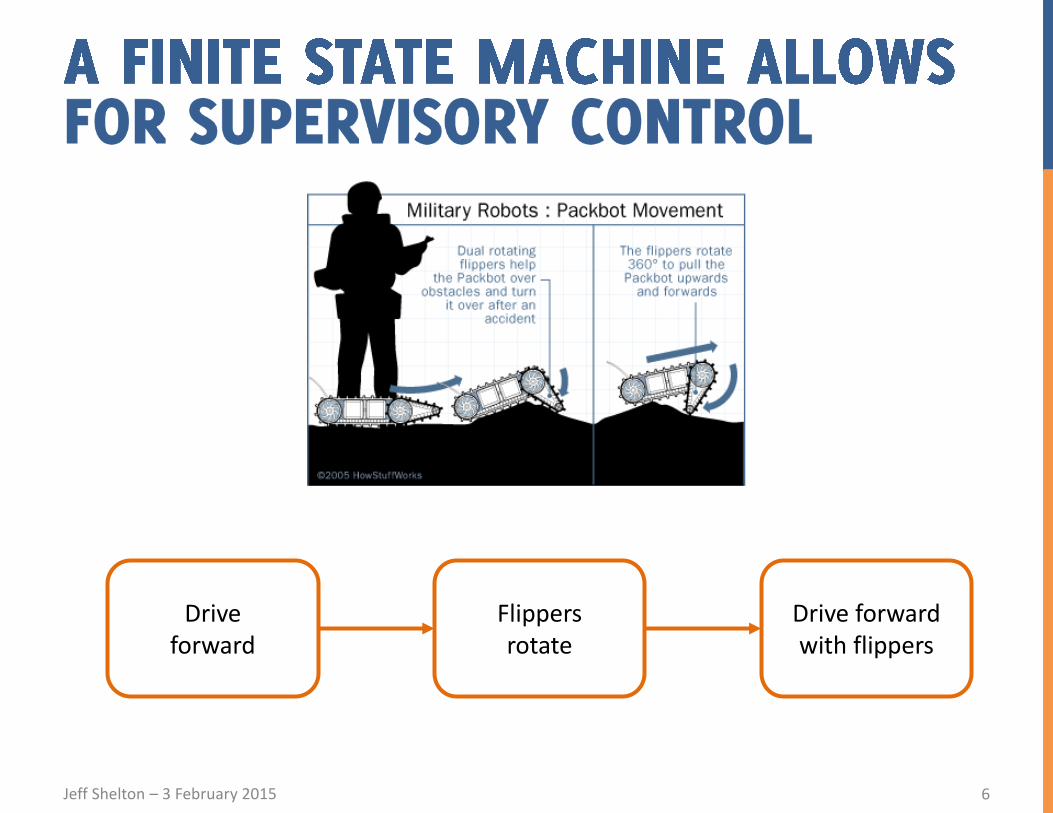
Drive forward
Flippers rotate
Drive forward with flippers
6
Jeff Shelton – 3 February 2015
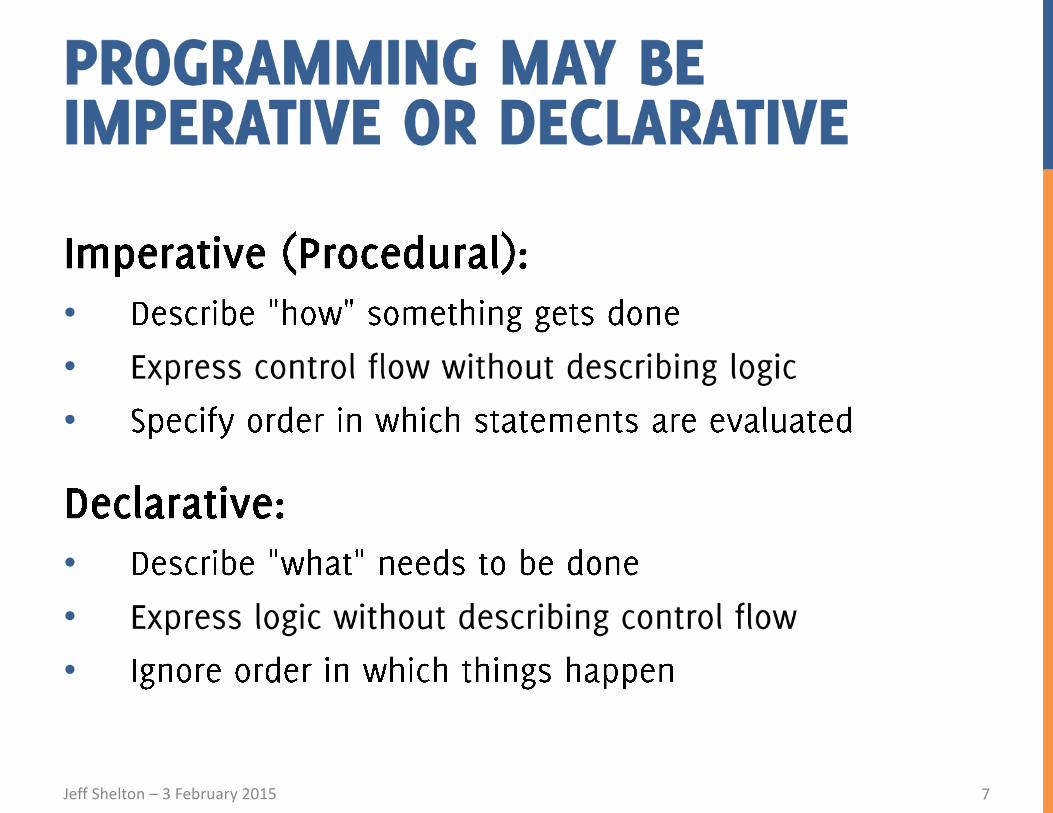
•
•
•
•
•
•
7
Jeff Shelton – 3 February 2015 8
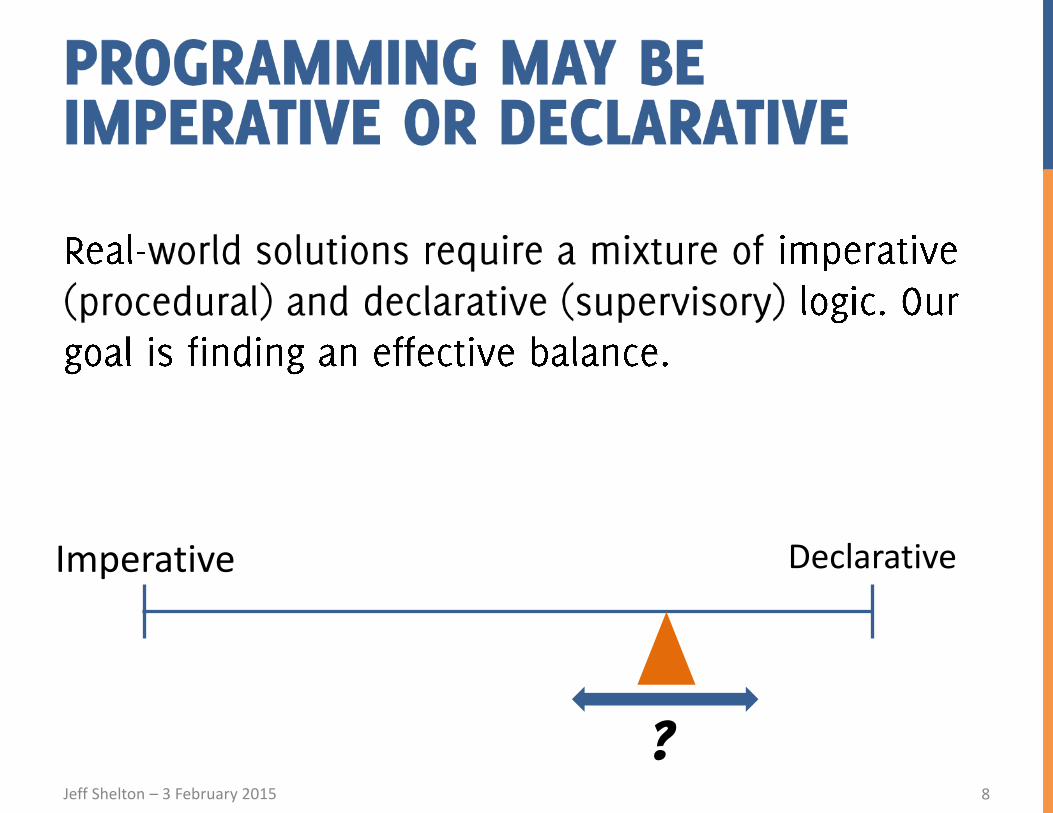
Imperative Declarative
?
Jeff Shelton – 3 February 2015 9
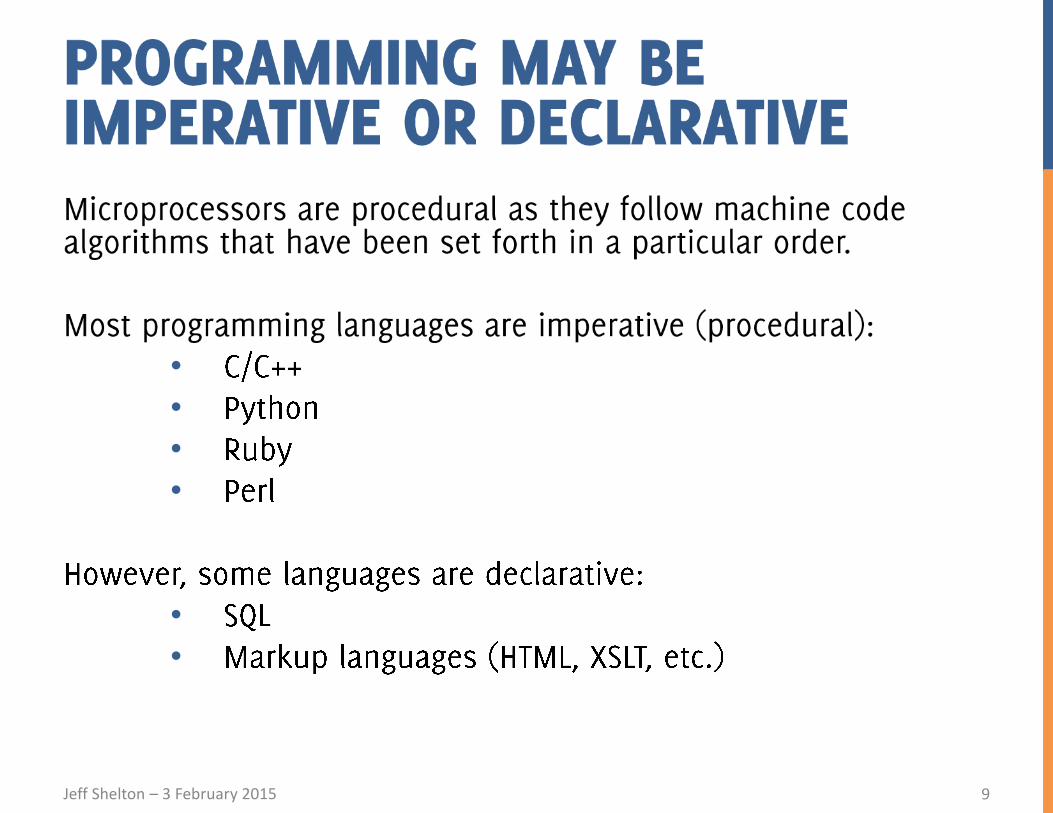
•
•
•
•
•
•
Jeff Shelton – 3 February 2015 10
Jeff Shelton – 3 February 2015
⟶
11
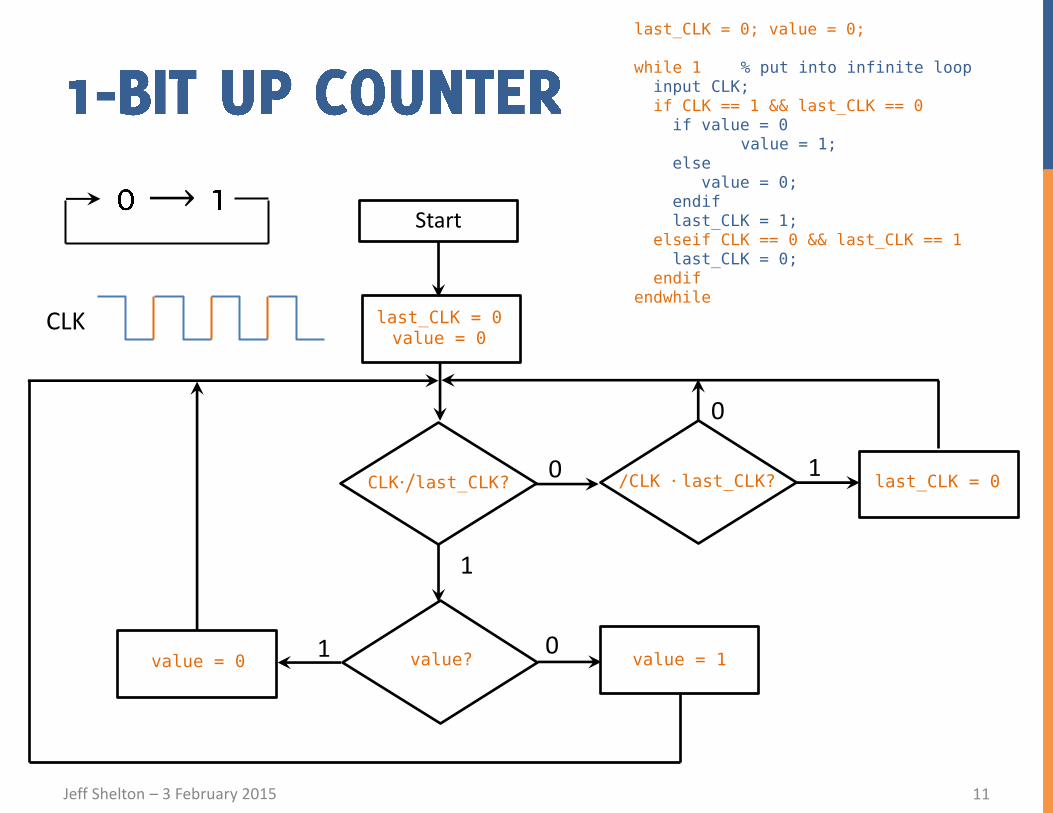
1
value = 0
last_CLK = 0 value = 0
0
Start
CLK⋅/last_CLK? last_CLK = 0 /CLK ⋅ last_CLK?
value?
0
value = 1 0 1
1
last_CLK = 0; value = 0; while 1 % put into infinite loop input CLK; if CLK == 1 && last_CLK == 0 if value = 0 value = 1; else value = 0; endif last_CLK = 1; elseif CLK == 0 && last_CLK == 1 last_CLK = 0; endif endwhile
CLK
Jeff Shelton – 3 February 2015
⟶
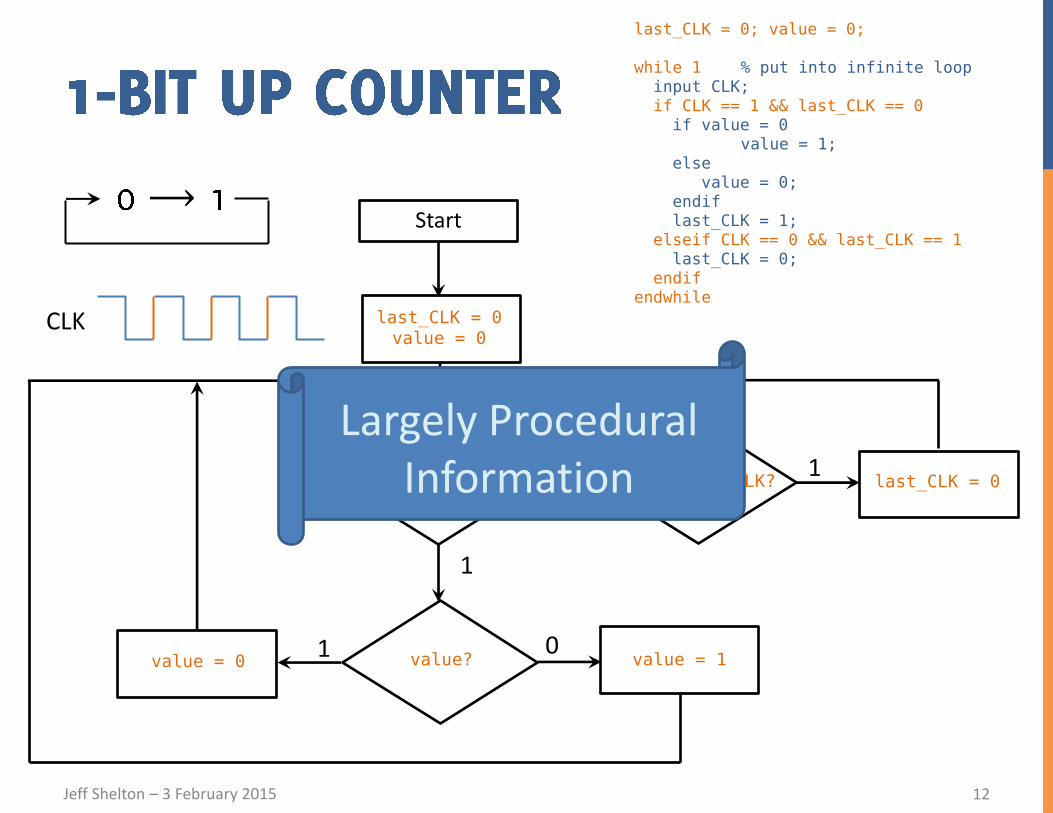
12
1
value = 0
last_CLK = 0 value = 0
0
Start
CLK⋅/last_CLK? last_CLK = 0 /CLK ⋅ last_CLK?
value?
0
value = 1 0 1
1
last_CLK = 0; value = 0; while 1 % put into infinite loop input CLK; if CLK == 1 && last_CLK == 0 if value = 0 value = 1; else value = 0; endif last_CLK = 1; elseif CLK == 0 && last_CLK == 1 last_CLK = 0; endif endwhile
CLK
Largely Procedural Information
Jeff Shelton – 3 February 2015
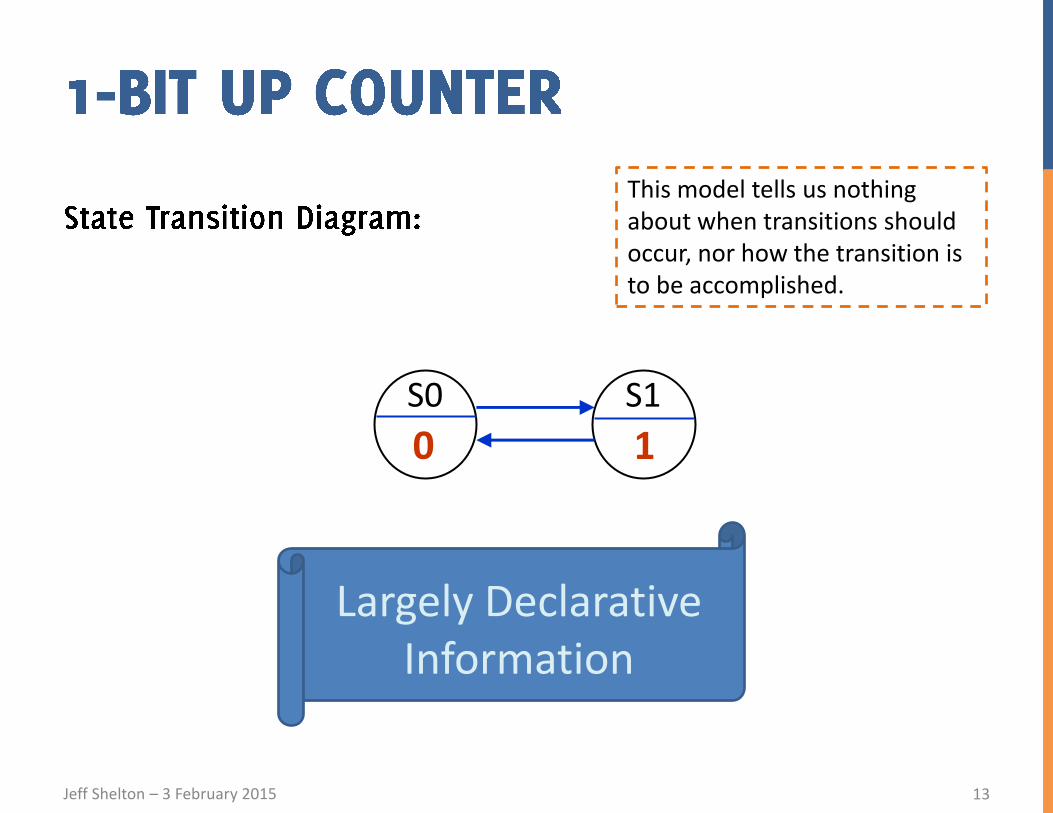
S0 S1
0 1
13
This model tells us nothing about when transitions should occur, nor how the transition is to be accomplished.
Largely Declarative Information
Jeff Shelton – 3 February 2015
•
•
•
14
Jeff Shelton – 3 February 2015
15
Jeff Shelton – 3 February 2015 16
Jeff Shelton – 3 February 2015 17
Jeff Shelton – 3 February 2015
•
•
•
•
18
Jeff Shelton – 3 February 2015
•
•
•
•
19
Jeff Shelton – 3 February 2015 20
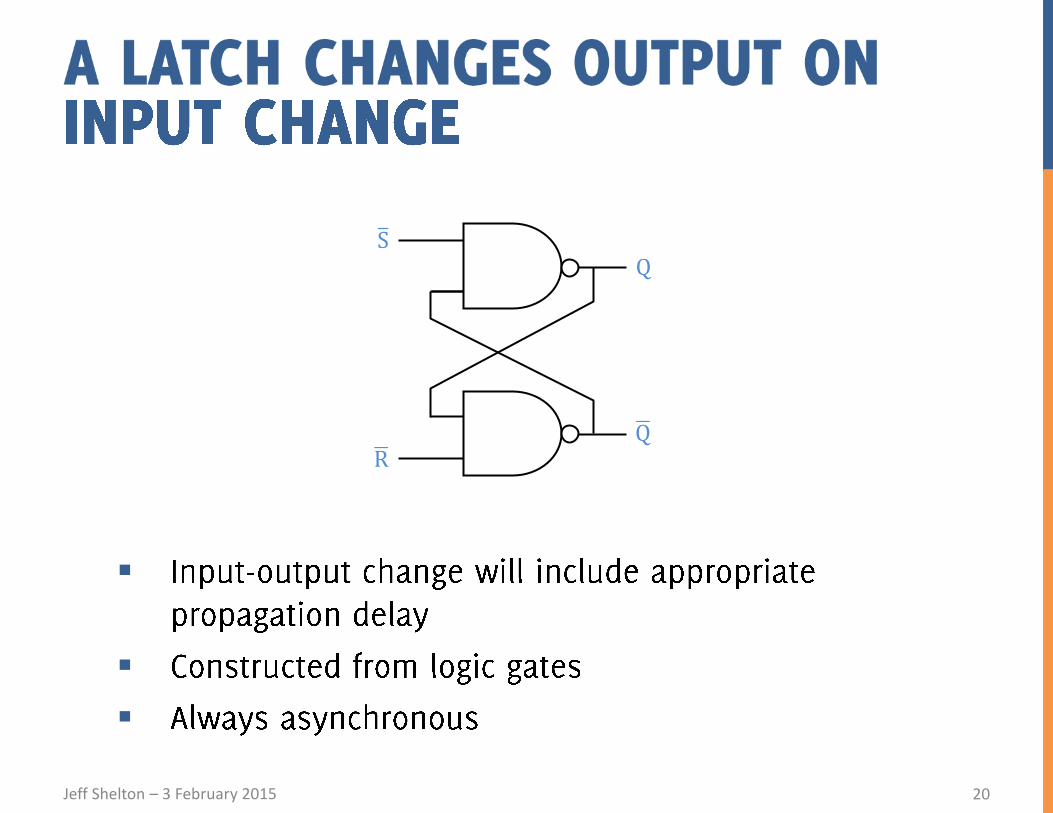
Q
Q
S
R
Jeff Shelton – 3 February 2015 21
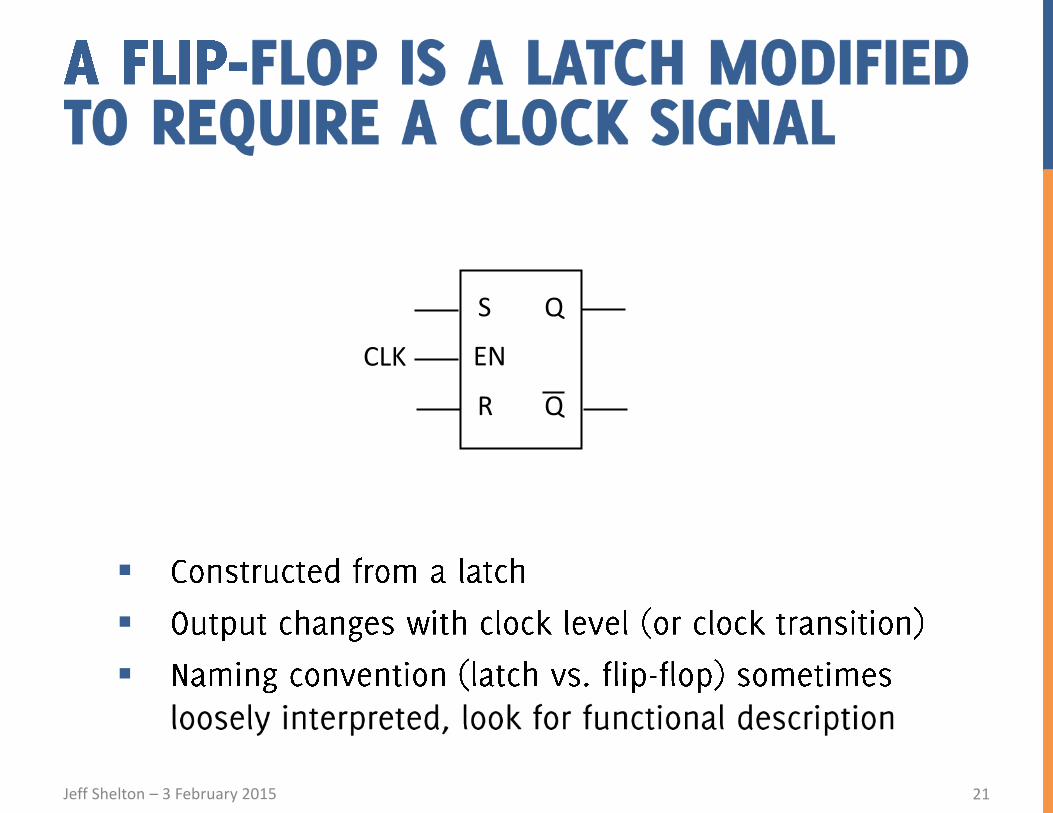
S Q
Q R
EN CLK
Jeff Shelton – 3 February 2015
22
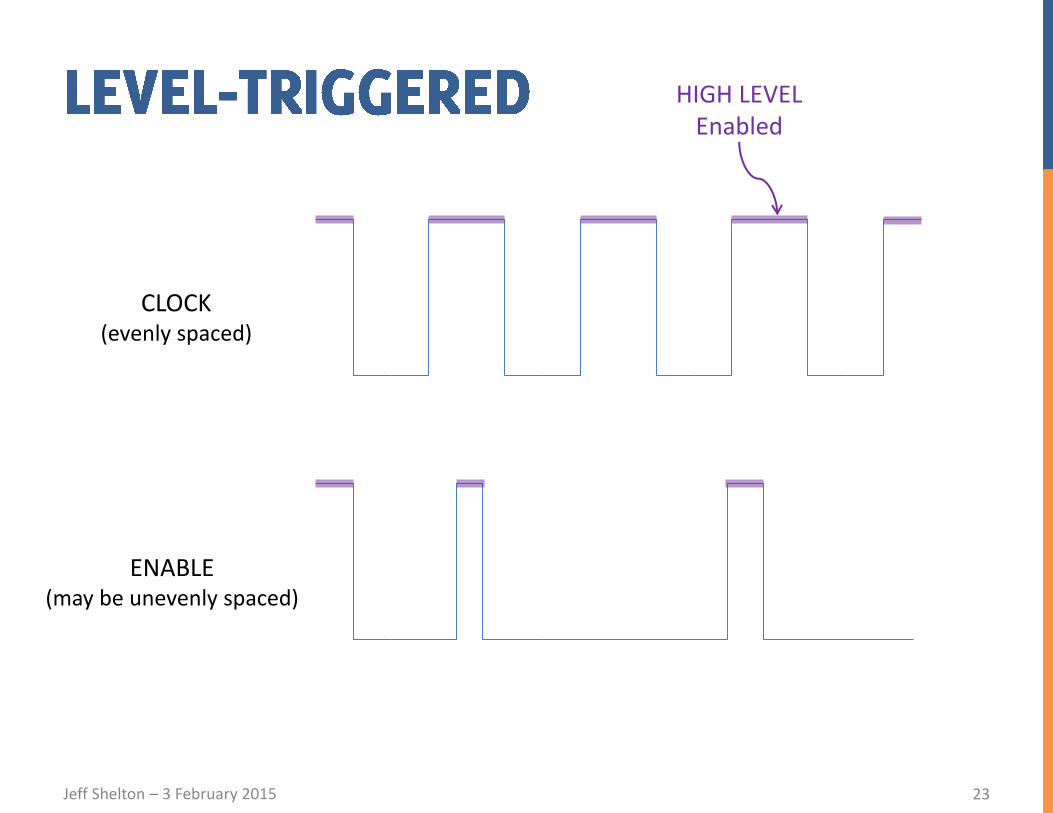
Jeff Shelton – 3 February 2015 23
CLOCK (evenly spaced)
HIGH LEVEL Enabled
ENABLE (may be unevenly spaced)
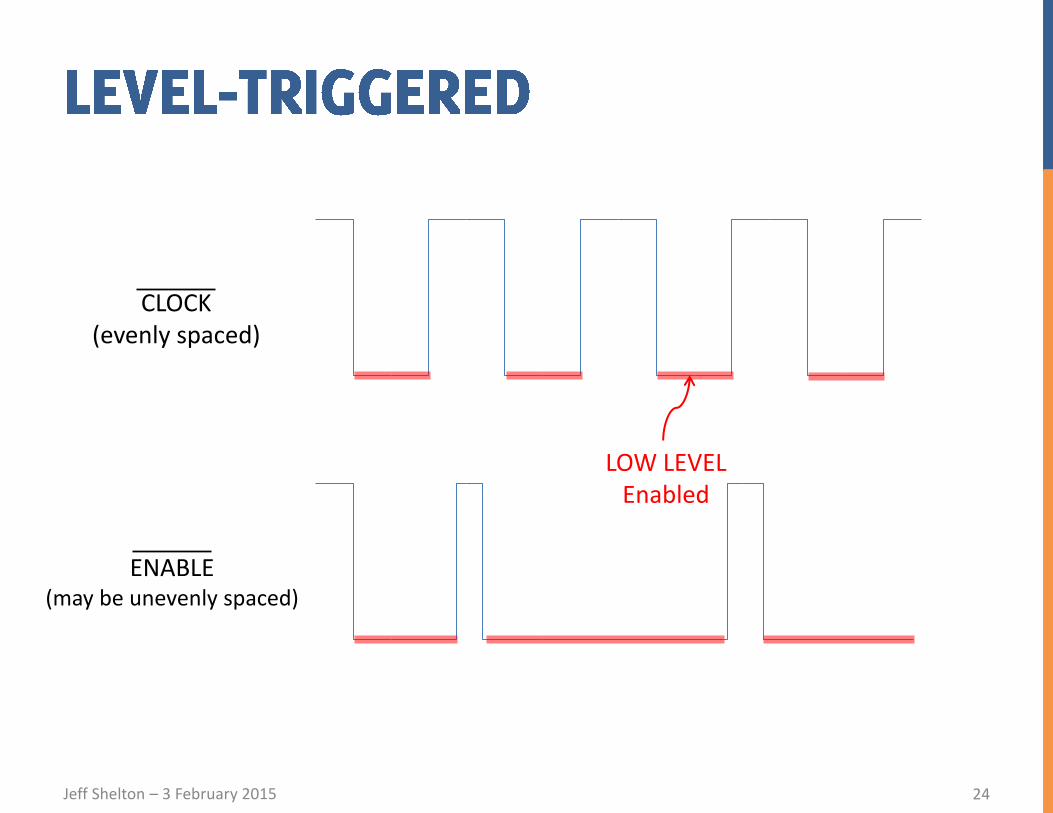
Jeff Shelton – 3 February 2015 24
CLOCK (evenly spaced)
ENABLE (may be unevenly spaced)
LOW LEVEL Enabled
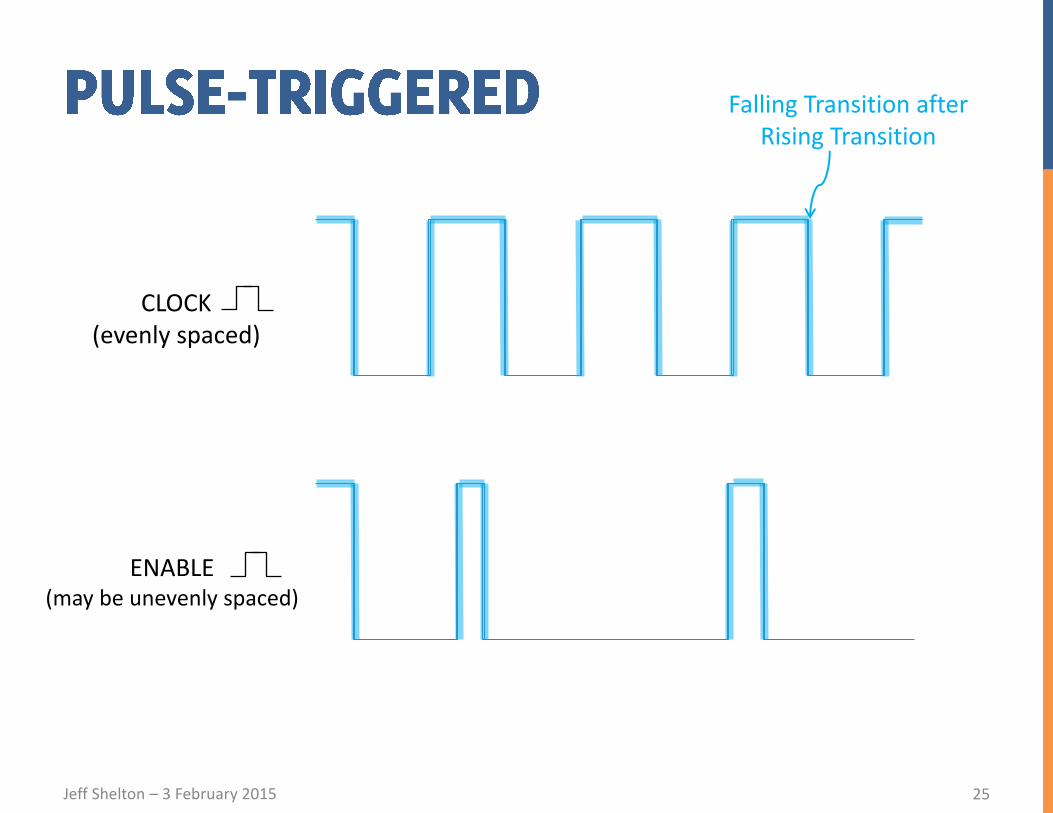
Jeff Shelton – 3 February 2015 25
CLOCK (evenly spaced)
ENABLE (may be unevenly spaced)
Falling Transition after Rising Transition
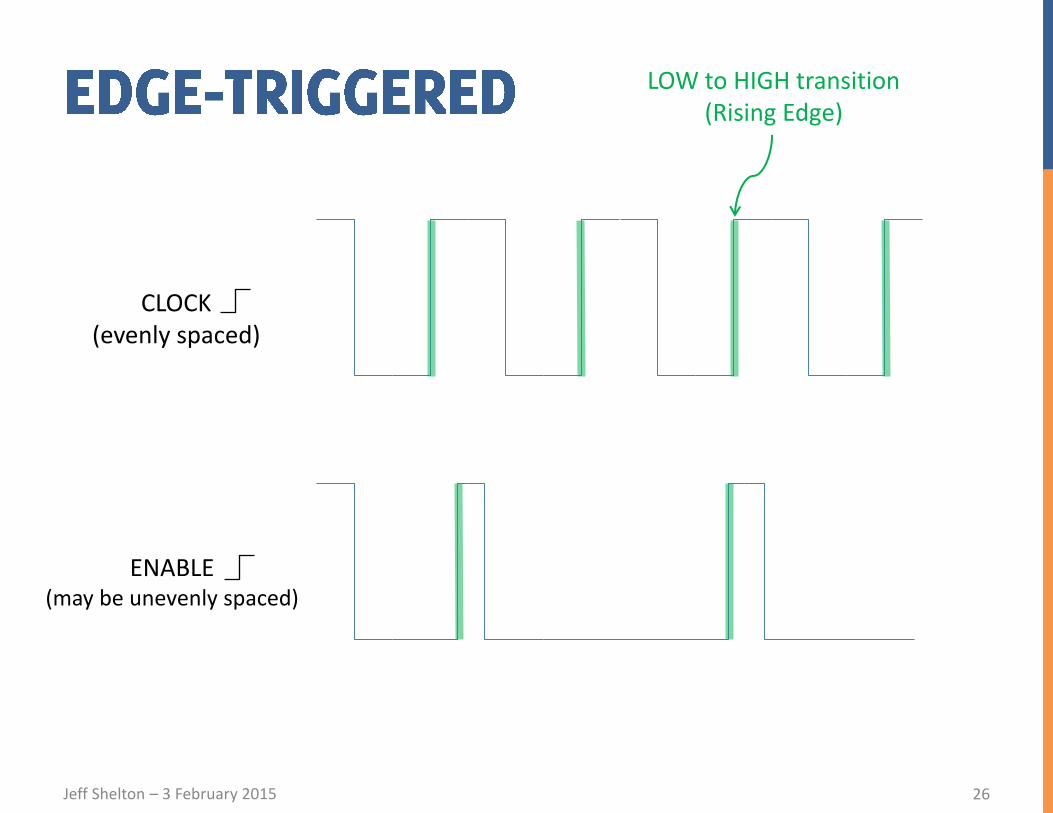
Jeff Shelton – 3 February 2015 26
CLOCK (evenly spaced)
ENABLE (may be unevenly spaced)
LOW to HIGH transition (Rising Edge)
Jeff Shelton – 3 February 2015 27
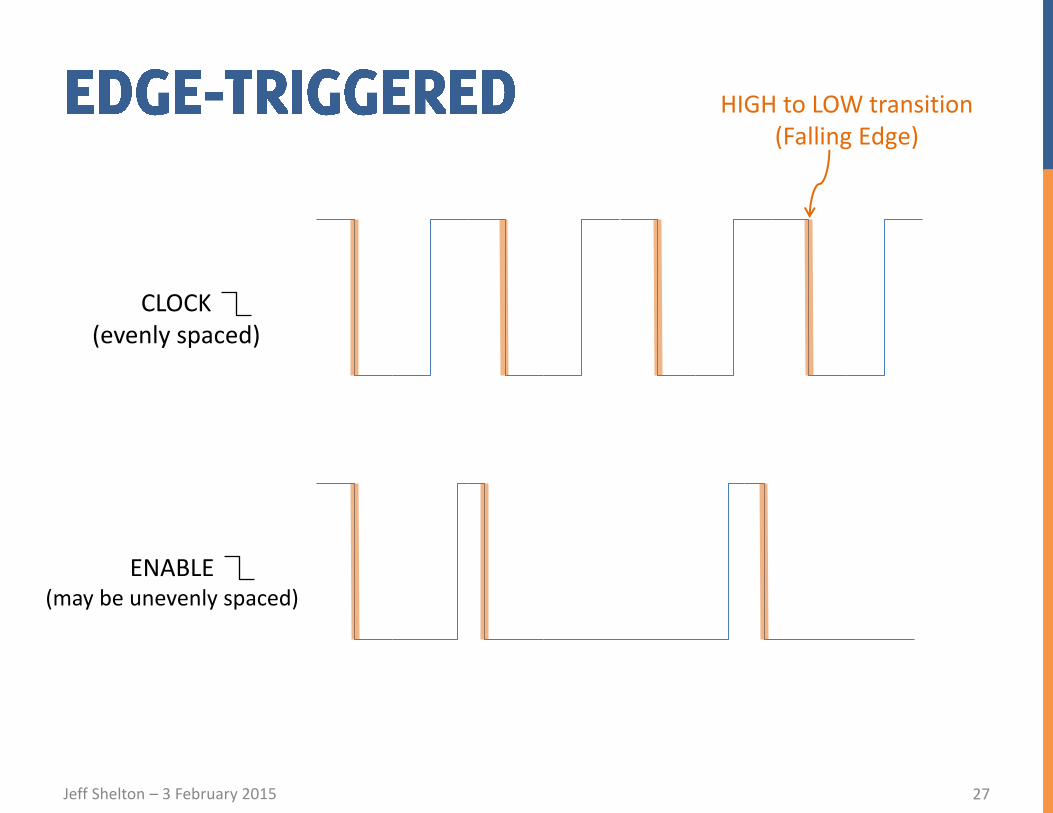
CLOCK (evenly spaced)
ENABLE (may be unevenly spaced)
HIGH to LOW transition (Falling Edge)
Jeff Shelton – 3 February 2015 28
Jeff Shelton – 3 February 2015
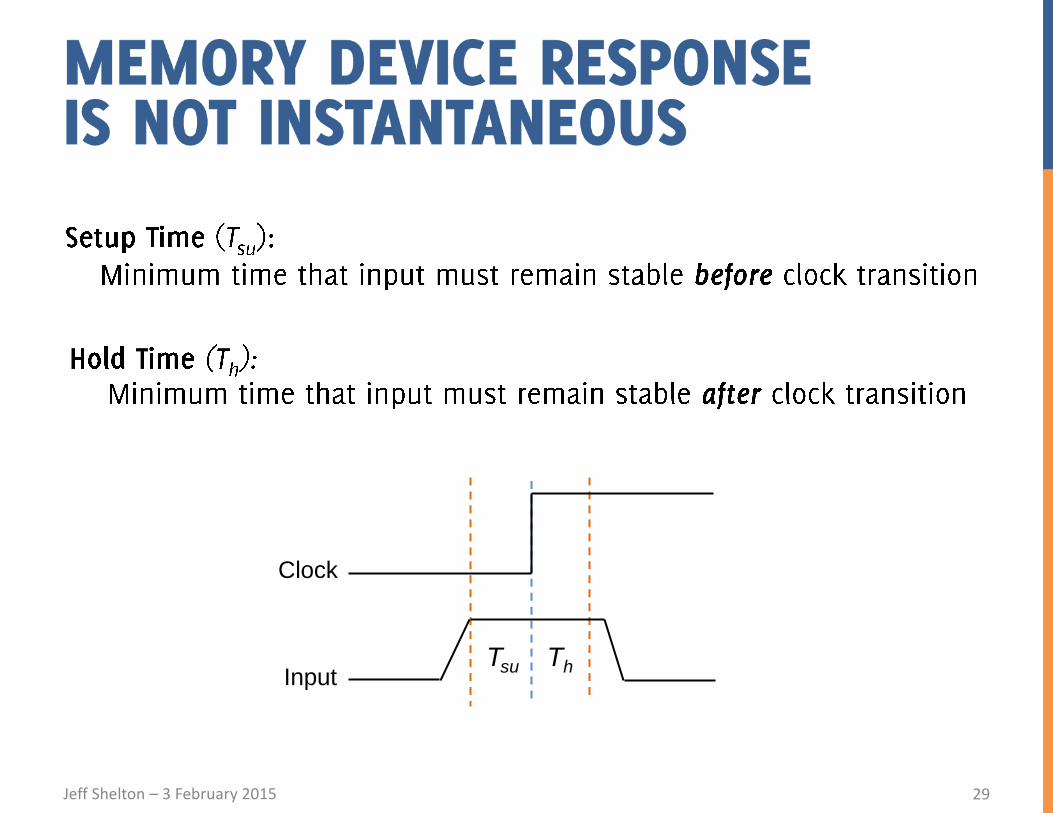
Input
Clock
29
Tsu Th
Jeff Shelton – 3 February 2015
30
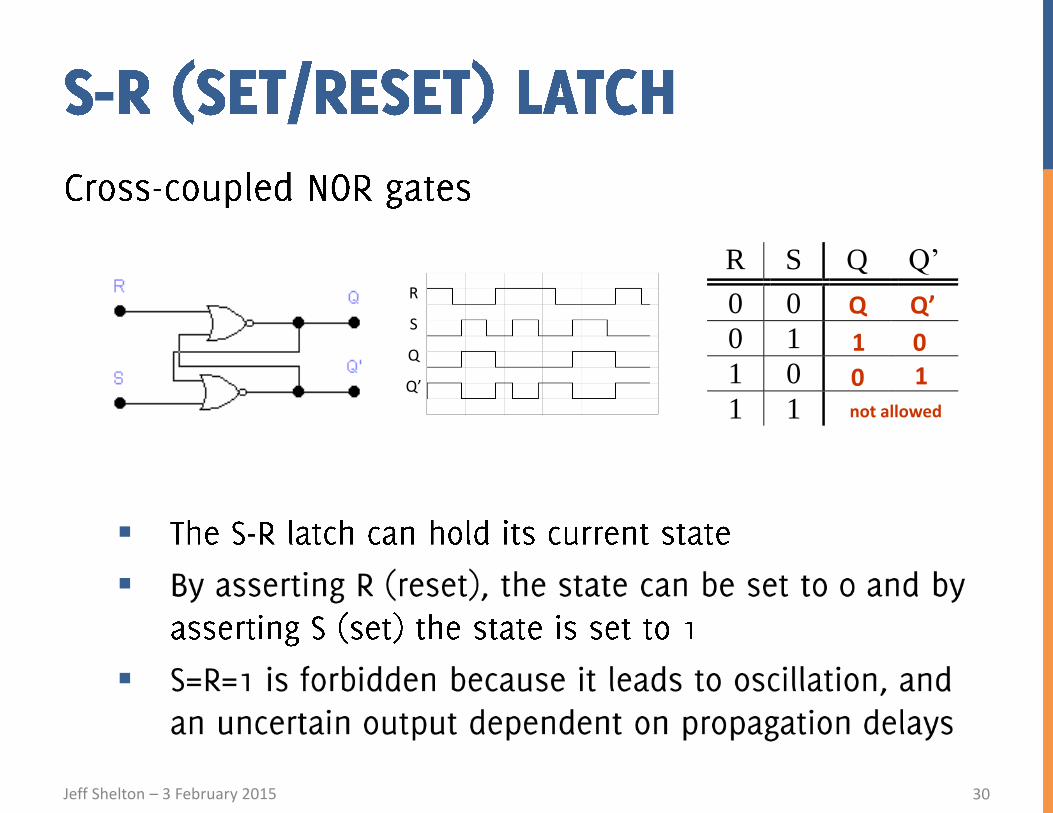
R
S
Q
Q’
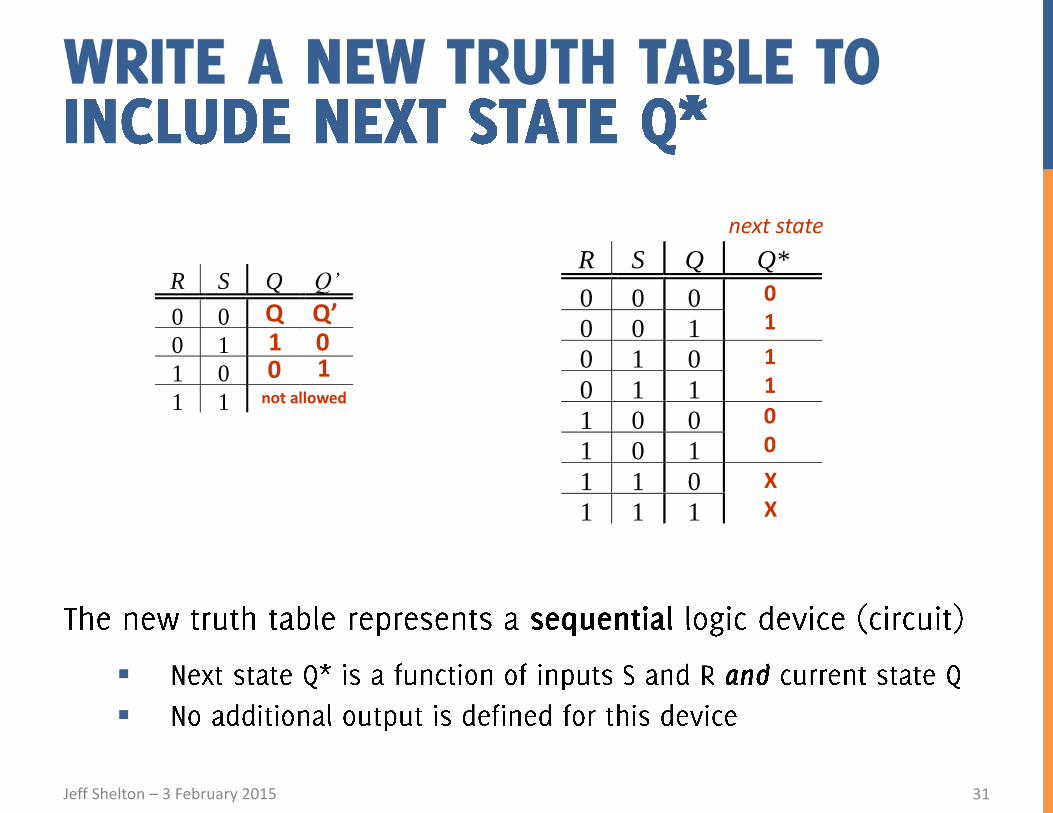
R S Q Q’
0 0
0 1
1 0
1 1
Q Q’
1 0
0 1 not allowed
Jeff Shelton – 3 February 2015
R S Q Q’
0 0
0 1
1 0
1 1
R S Q Q*
0 0 0
0 0 1
0 1 0
0 1 1
1 0 0
1 0 1
1 1 0
1 1 1
Q Q’ 1 0 0 1
not allowed
0 1
1 1
0 0
X X
next state
31

Jeff Shelton – 3 February 2015
R SS-R
Latch 00 01 11 10
0Q
1
S0 S1
0 1
S=1, R=0
S=0, R=1
S=0 R=0
S=0 R=1
S=0 R=0
S=1 R=0
1
0 1 X
X
0
0 1 𝑄∗ = 𝑆 + 𝑄 ⋅ 𝑅
32

Jeff Shelton – 3 February 2015 33
Q
Q
S
R
R S /R /S Q Q’
0 0 1 1
0 1 1 0
1 0 0 1
1 1 0 0
Q Q’ 1 0 0 1
not allowed
74279 Quad S-R Latch
S Q
Q R R
S
Q
Q
S
R
+5V
+5V
Switch Debouncing Circuit
VQ
t
VR'
t
R
S
Q
Q’
Jeff Shelton – 3 February 2015
0 0
0
1
1
1
0 1
J KJ-KLatch 00 01 11 10
0Q
1
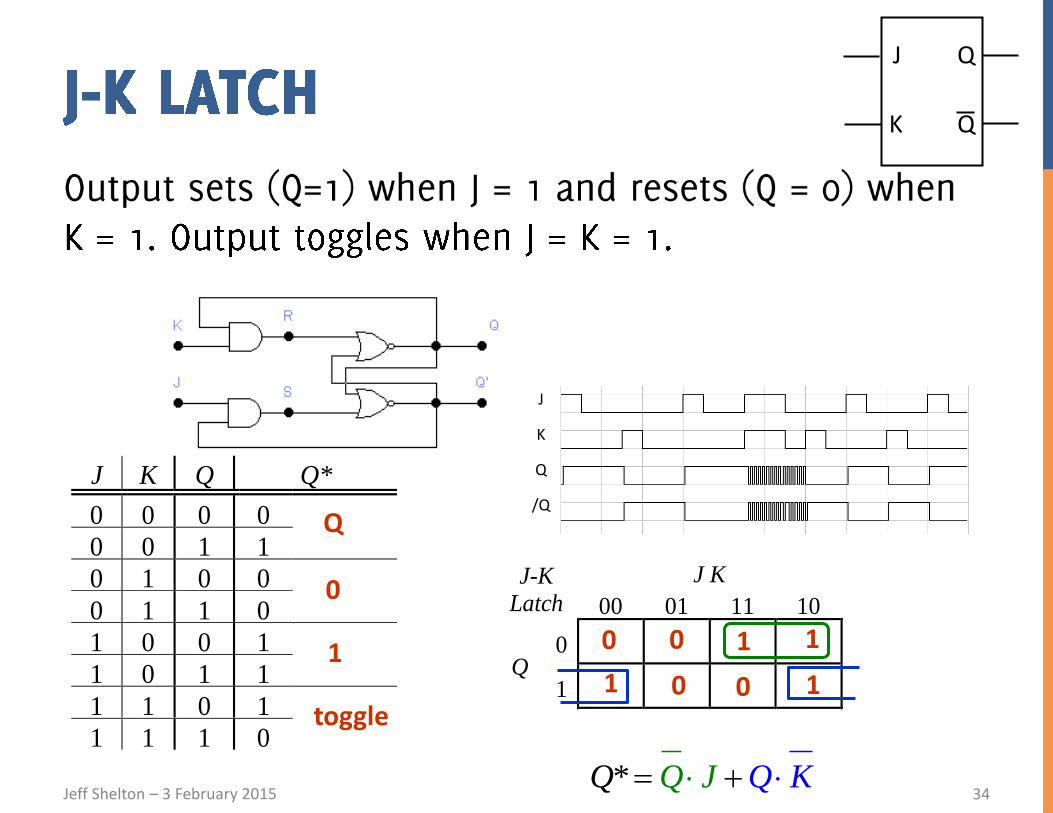
J
K
Q
/Q
J K Q Q*
0 0 0 0
0 0 1 1
0 1 0 0
0 1 1 0
1 0 0 1
1 0 1 1
1 1 0 1
1 1 1 0
Q
0
1
toggle
Q*Q J Q K34
J Q
Q K
Jeff Shelton – 3 February 2015
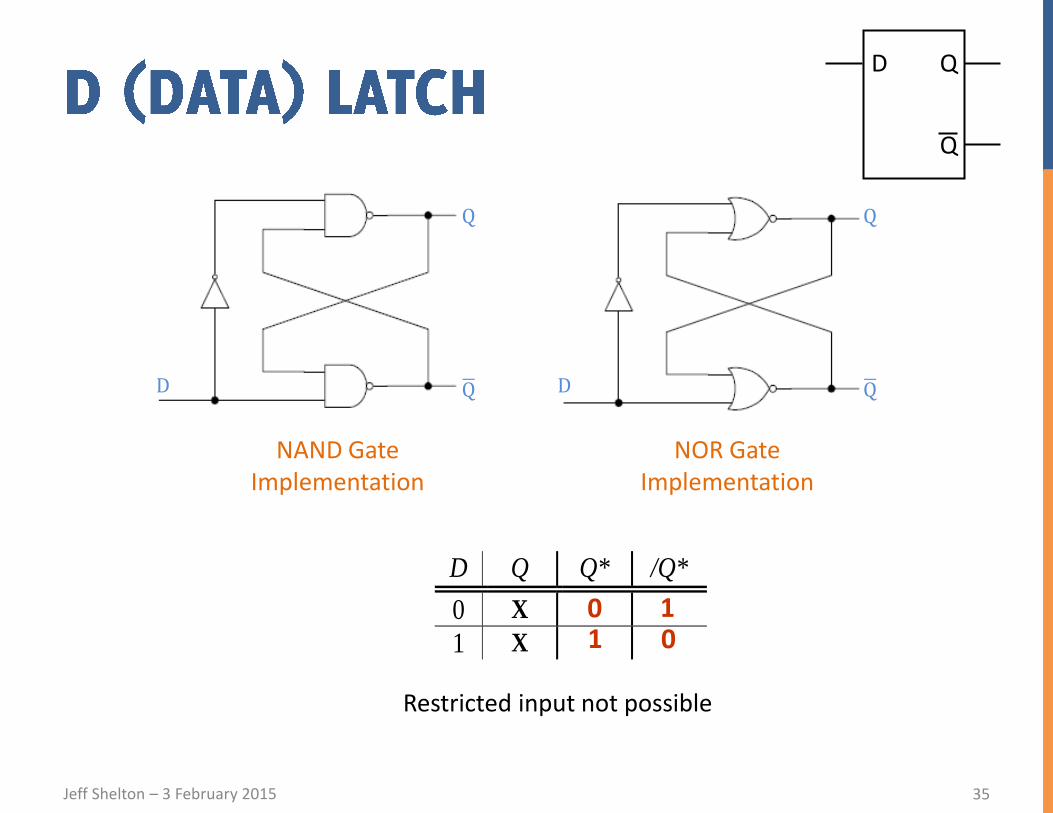
D Q Q* /Q*
0 X
1 X
1 0 1
0
35
D Q
Q
D
Q
Q
NAND Gate Implementation
NOR Gate Implementation
D
Q
Q
Restricted input not possible

Jeff Shelton – 3 February 2015
36
Jeff Shelton – 3 February 2015
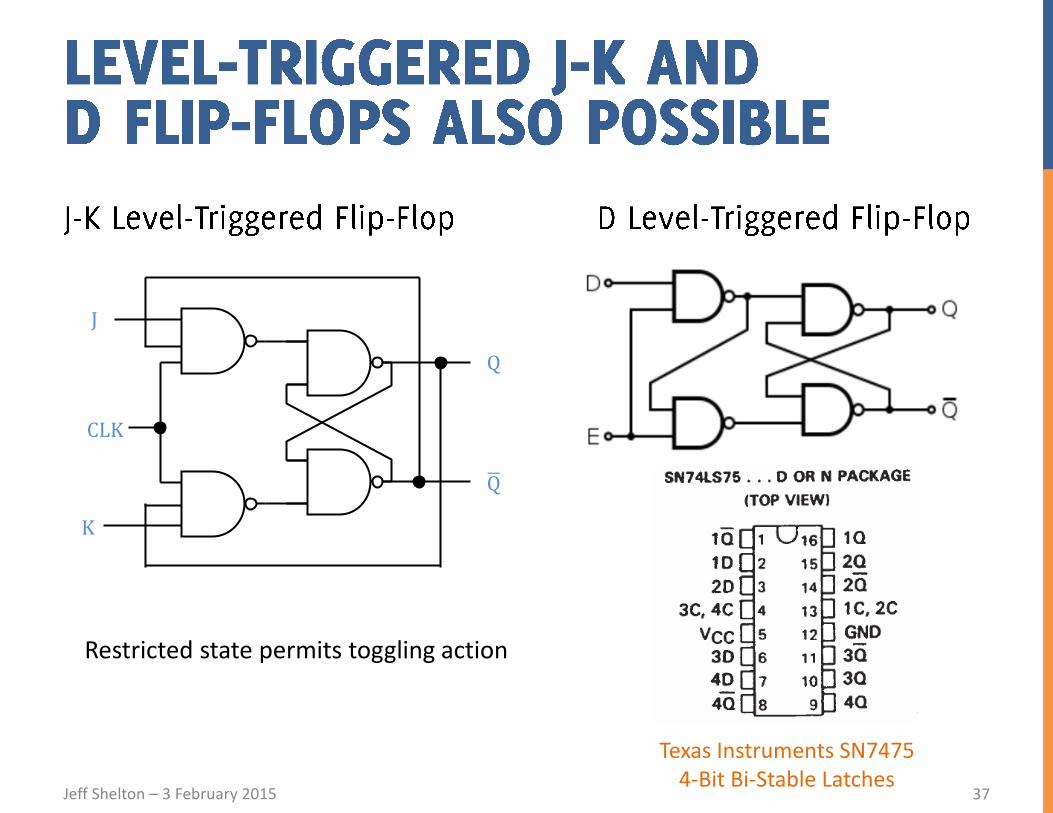
J
K
CLK
Q
Q
Restricted state permits toggling action
Texas Instruments SN7475 4-Bit Bi-Stable Latches
37

Jeff Shelton – 3 February 2015
38
S Q
EN
R
S
R
Q
Q
EN
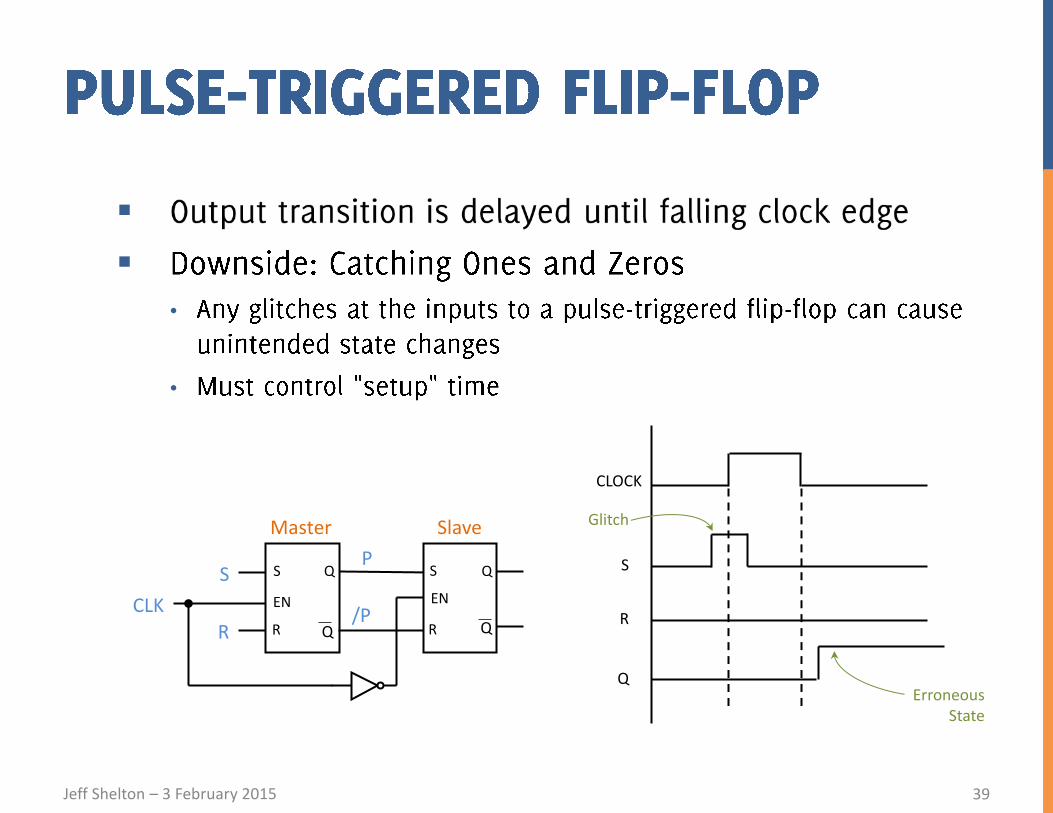
P S
CLK
R /P
Master Slave
Q
S
R
Jeff Shelton – 3 February 2015
•
•
39
CLOCK
S
R
Q
Glitch
Erroneous State
S Q
EN
R
S
R
Q
Q
EN
P S
CLK
R /P
Master Slave
Q
S
R
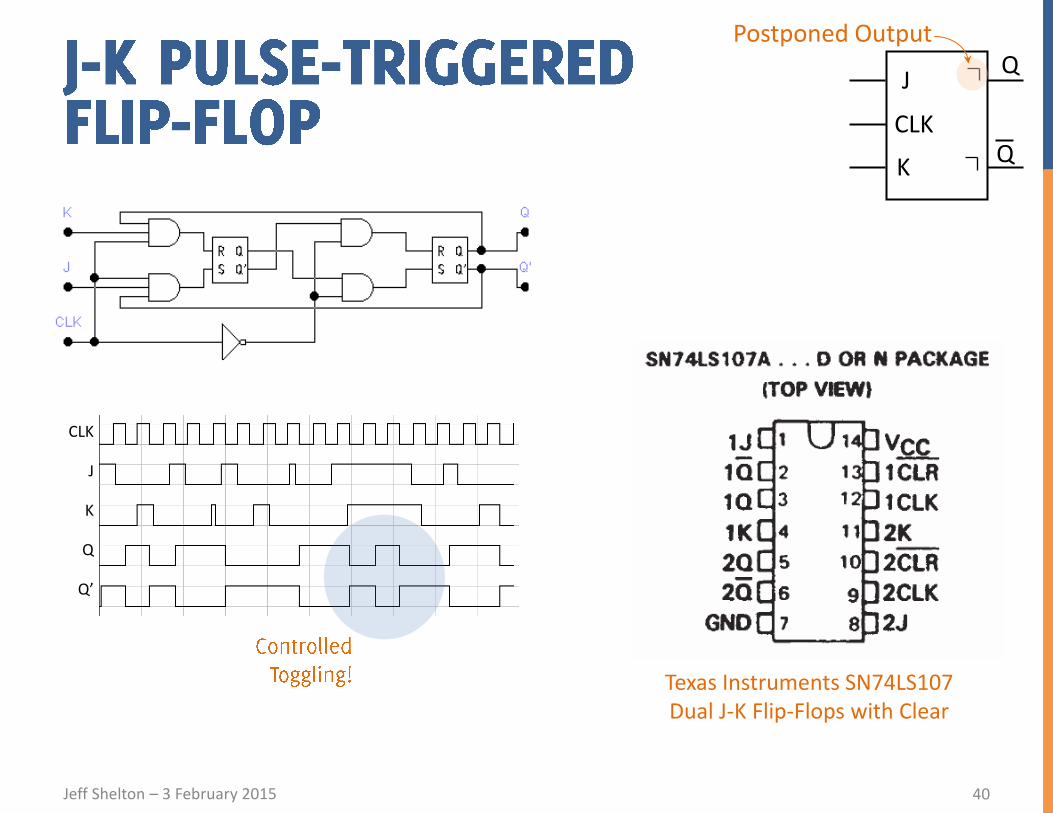
Jeff Shelton – 3 February 2015
CLK
J
K
Q
Q’
40
J Q
Q CLK
K
Postponed Output
Texas Instruments SN74LS107 Dual J-K Flip-Flops with Clear
Jeff Shelton – 3 February 2015
41
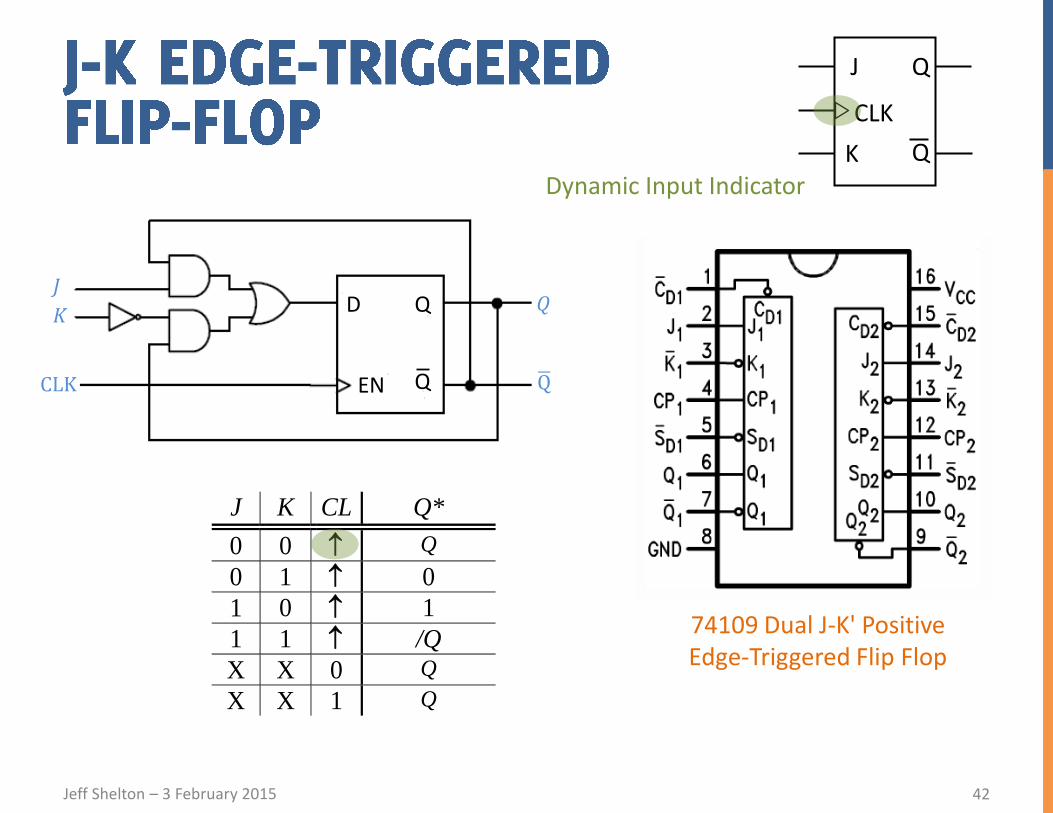
Jeff Shelton – 3 February 2015 42
J Q
Q
CLK
K
𝐽
𝐾
CLK
𝑄
Q
D
EN
Q
Q
J K CL Q*
0 0 Q
0 1 0
1 0 1
1 1 /Q
X X 0 Q
X X 1 Q
74109 Dual J-K' Positive Edge-Triggered Flip Flop
Dynamic Input Indicator
Jeff Shelton – 3 February 2015
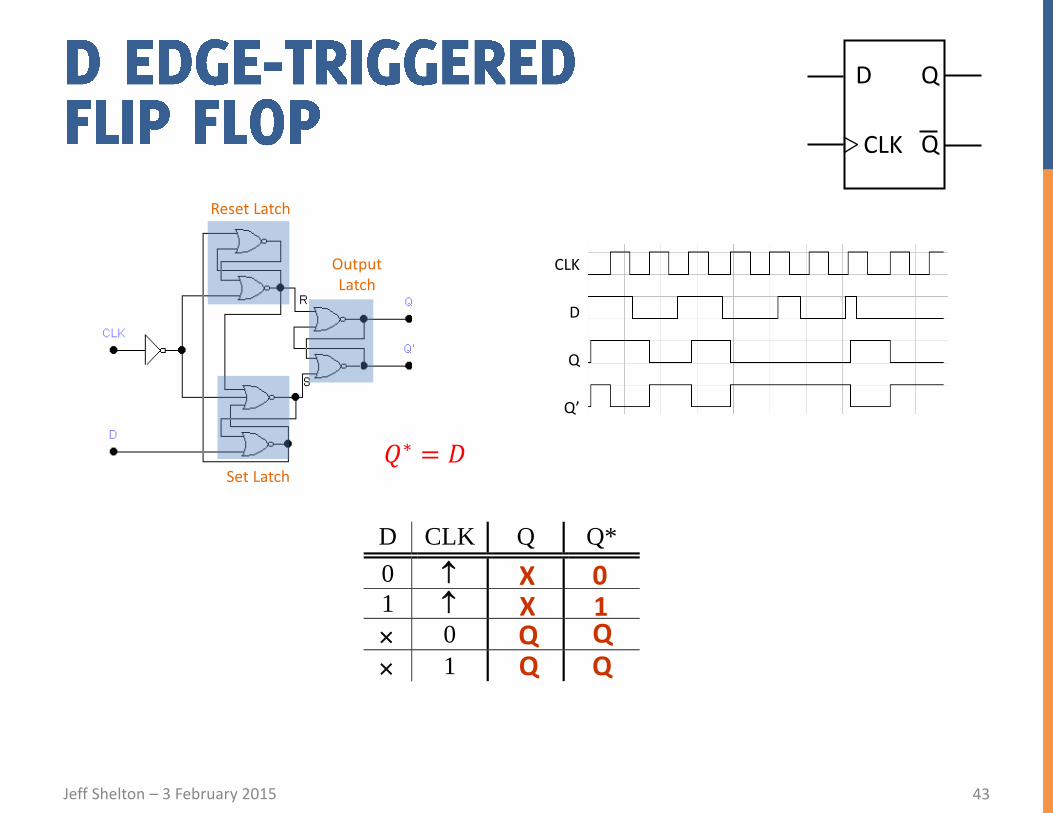
CLK
D
Q
Q’
D CLK Q Q*
0
1
0
1
X X 0
1 Q Q Q Q
𝑄∗ = 𝐷
43
D Q
Q CLK
Reset Latch
Set Latch
Output Latch
Jeff Shelton – 3 February 2015
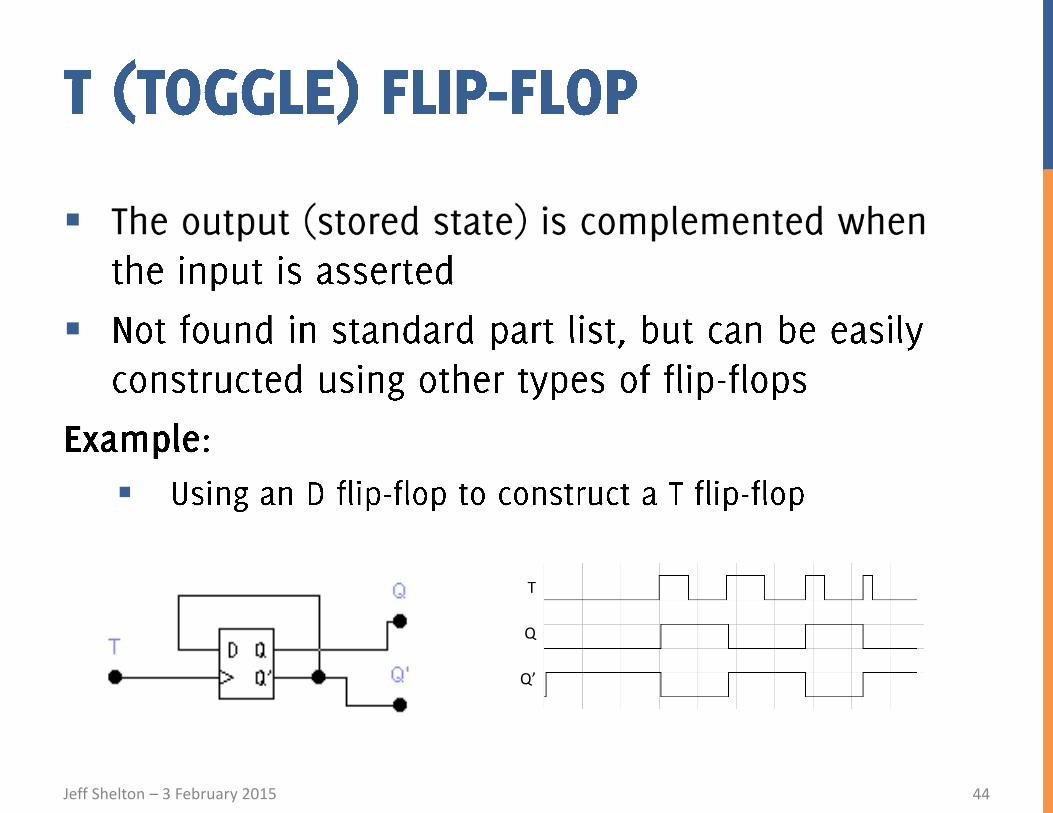
T
Q
Q’
44
Jeff Shelton – 3 February 2015
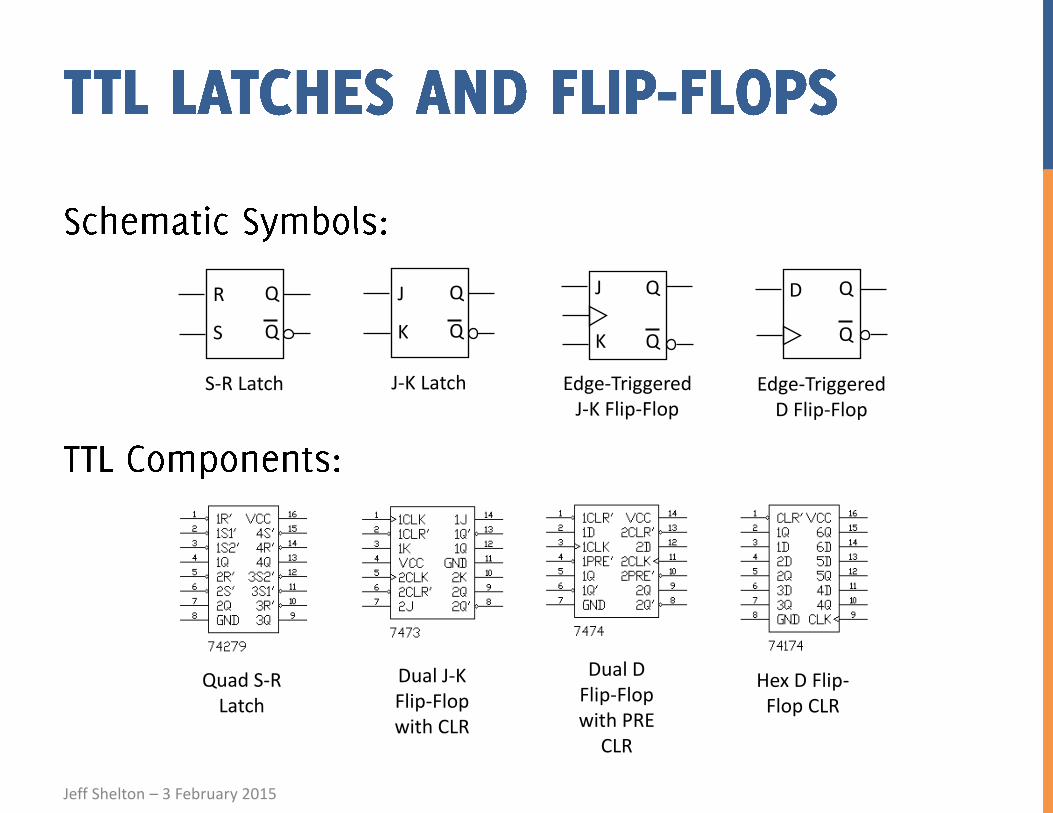
Quad S-R Latch
Dual J-K Flip-Flop with CLR
Dual D Flip-Flop with PRE
CLR
Hex D Flip-Flop CLR
R
S
Q
Q
S-R Latch
J
K
Q
Q
J-K Latch
J
K
Q
Q
Edge-Triggered J-K Flip-Flop
Edge-Triggered D Flip-Flop
D Q
Q
Jeff Shelton – 3 February 2015
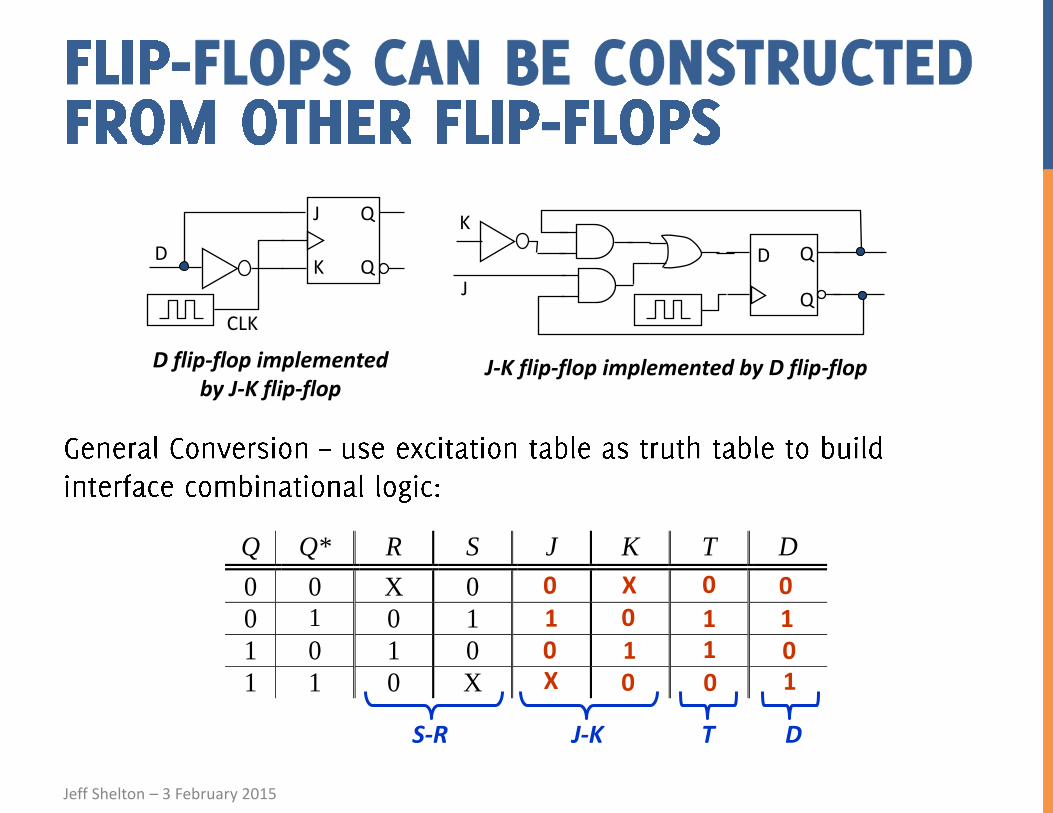
J
K
Q
Q D
CLK
D flip-flop implemented by J-K flip-flop
D Q
Q
K
J
J-K flip-flop implemented by D flip-flop
Q Q* R S J K T D
0 0 X 0
0 1 0 1
1 0 1 0
1 1 0 X
X 0
0 1 1 0
X 0
1 0
0 1
1
0
0 1
S-R J-K T D

Jeff Shelton – 3 February 2015
47
Jeff Shelton – 3 February 2015
•
•
•
48

Jeff Shelton – 3 February 2015
49
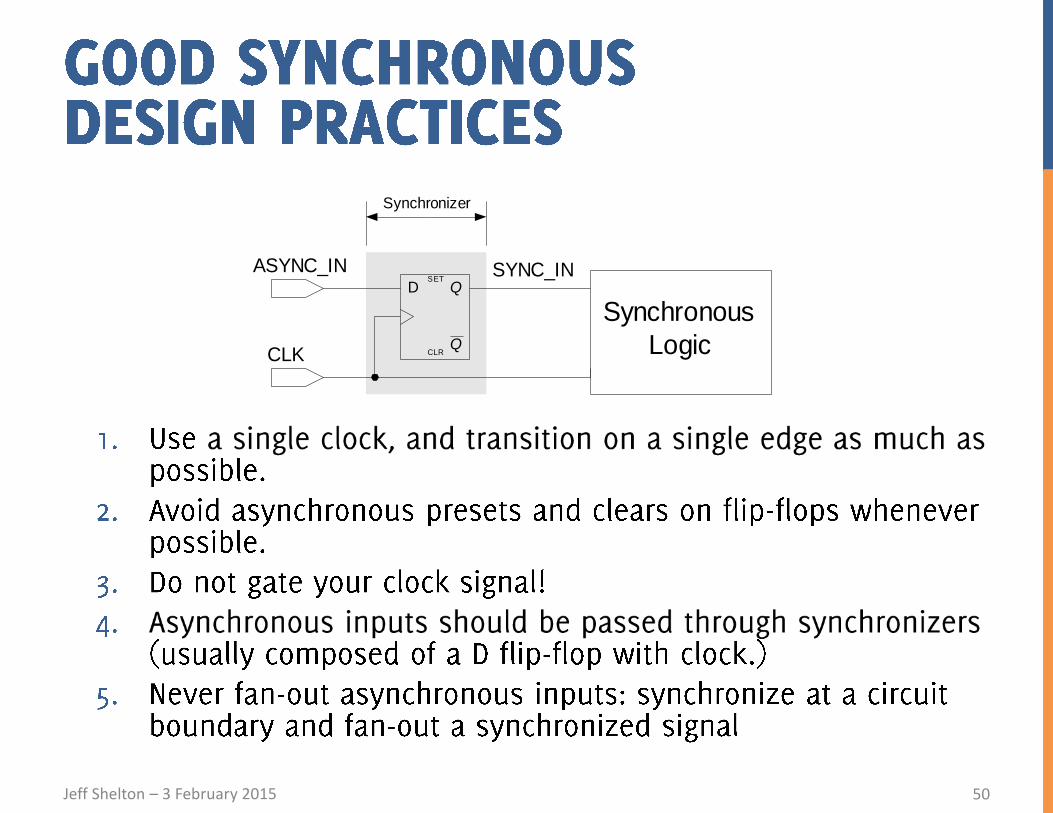
Q
QSET
CLR
D
ASYNC_IN
CLK
SYNC_IN
Synchronous
Logic
Synchronizer
Jeff Shelton – 3 February 2015
Q
QSET
CLR
D
ASYNC_IN
CLK
SYNC_IN
Synchronous
Logic
Synchronizer
50
Jeff Shelton – 3 February 2015
51
















![Master [120] in Electro-mechanical Engineering · • Specialists in mechatronics (electronics, mechanical production, automation and robotics) or specialists in energy (smart grids](https://static.fdocuments.in/doc/165x107/5e9f718d68a1e07f61215c28/master-120-in-electro-mechanical-engineering-a-specialists-in-mechatronics-electronics.jpg)

