Mathcad Professional - Navgen20 DARIO Ac12 001

of 10
-
Upload
marko-krstic -
Category
Documents
-
view
217 -
download
0
Transcript of Mathcad Professional - Navgen20 DARIO Ac12 001
-
8/4/2019 Mathcad Professional - Navgen20 DARIO Ac12 001
1/10
CALCULATION OF POSITION ERRORS dRMS, 2dRMS,CEP95 AND OF THE ERROR ELLIPSE FOR p=O.95
THE NAVGEN ALGORITHM
1. Input of Data
Reading in of the data table containing the coordinates of the position fixes. The data file to
be read can be produced from NMEA data using the GPS_NMEA_File_Parser available on
the author's web site.
Reading data table
ORIGIN 1
W READPRN "C:\ICT_EDU\DARIO\ac12_001_GGA.prn"( ):=
v W1 :=
N last v( ):= N 1109= Number of data sets in the table read in
-
8/4/2019 Mathcad Professional - Navgen20 DARIO Ac12 001
2/10
Here you can set the true position where the measurement has taken place, if it is known.
In this case the systematical or calibration error will be calculated.
If the true position is not known, then the mean position will be determined from the data
measured and this position will be used for the determination of the random error.
2. Reference Position
Duration in h of data to be evaluatedtM 0.15=
tMN
rm 3600
:=
Length of new tableN 1109=N length M 1 ( ):=
Mi 3,
Wi 3,
:=Mi 2,
Wi 2,
:=Mi 1,
Wi 1,
:=
i Ad Ad Ld+ 1( )..:=
Loading of new table to be used for processing
Insert here number of data sets to be processed
or insert N !Ld N:=No of data sets to
be processed
Sample rate and measurement time in seconds
Time for k samples k 10:=
tm floor Wk 1+ 1,( ) floor W1 1,( )( ) floor Wk 1+ 1,( ) floor W1 1,( )( ) 0if
floor max W1 ( ) floor W
1 1,( ) floor Wk 1+ 1,( )+ otherwise
:=
Measurement rate
rm
tm
10:= rm 2= second(s)
Overall measurement time
To rm N:= To 2218= secondsTo
36000.62= hours
Definition of start number of data set and number of data sets to be processed
Start number Ad 1:=
-
8/4/2019 Mathcad Professional - Navgen20 DARIO Ac12 001
3/10
setting check: wo 0= mo 1=
Bd Bm Br:= Bd 0= Deviation in Latitude
Ld Lm Lr:= Ld 0= Deviation in Longitude
Bk 60 1852 Bd:= Bk 0= Latitude deviation in metres
Lk 60 1852 Ld cos
180Br
:= Lk 0= Longitude deviation in metres
Magnitude of systematical position error
Fs Bk2
Lk2
+:= Fs 0=
Distance from reference to measured position
Bearing of systematical position error
atanBk( )Lk( )
180
:=
wo 0:= This 'switch' must be set!wo:=1 true location is known; wo:=0 true location is not known and mean
value of measured positions will be used as the reference position
Br 53.07958761:= Insert true location, if knownLr 8.8720018:=
mo 1 wo:= If true location is unknown, the mean position will be used.
3. Systematical Position Error (Calibration Error)
Bm mean M
2
( ):= Bm 44.80407608= Mean positionLm mean M
3 ( ):= Lm 20.48047496=
max M2 ( ) 44.804131= min M 2 ( ) 44.8039988=
Extrema of fluctuations
max M3 ( ) 20.4806188= min M 3 ( ) 20.4804153=
Br wo Br mo Bm+:= Definition of reference position (either true or mean position)
Lr wo Lr mo Lm+:=
-
8/4/2019 Mathcad Professional - Navgen20 DARIO Ac12 001
4/10
Mi 11,
90 i Mi 7, 0if
270 i Mi 7, 0
-
8/4/2019 Mathcad Professional - Navgen20 DARIO Ac12 001
5/10
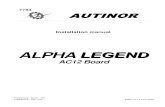
4.2.1 Plots of error vector magnitude and bearing
Time series of magnitudes
0 200 400 600 800 1000 12000
5
10
15
Mi 10,
i
max M 10 ( ) 11.44= median M 10 ( ) 3.42= stdev M 10 ( ) 1.98=
Time series of bearings
0 200 400 600 800 1000 12000
90
180
270
360
Mi 11,
i
5. Error Circles of Varying Probabilities (dRMS, 2dRMS)
5.1 Excentricity of error ellipse
stdh
r
:=
kmin std( )
max std( ):=
k 0.71=
-
8/4/2019 Mathcad Professional - Navgen20 DARIO Ac12 001
6/10
0.0432597924=1
N
i
Mi 6,
Mi 7,
( )=
1
N
i
Mi 6,( )
2
= 1
N
i
Mi 7,( )
2
=
:=
Correlation coefficient
6.1 Decorrelation of measurement data
6. Error Circles of Fixed Probability (CEP95)
(Harre approximation .2)P2dRMS 0.978=
P2dRMS 0.95435874 0.0017921523 k+ 0.0895571 k( )
2
+ 0.064296814 k( )
3
:=
Probability content of 2dRMS
2 dRMS 8.63=
5.3 2dRMS position error
(Harre approximation .2)PdRMS 0.641=
PdRMS0.6300358 20.672132 0.68259309 k( )
5.1208746( )+
20.672132 k( )5.1208746( )
+
:=
Probability content of dRMS
dRMS 4.32=dRMS h2
r2
+:=
5.2 dRMS position error
-
8/4/2019 Mathcad Professional - Navgen20 DARIO Ac12 001
7/10
yt
CEP95 sint
100
Bk+:=
xt
CEP95 cost
100
Lk+:=
t 1 200 ..:=
Coordinates of error circle CEP95
7. Visualisation of Error Contours
CEP95 7.58=CEP95 k max std( ):=
Factor for CEP95 (Harre
approximation)k 1.960787 0.004121 c+ 0.114151 c
2+ 0.371707 c
3+:=
6.3 CEP95 - radius of error circle with p=0.95
Excentricity of error ellipsec 0.71205257=cmin std( )
max std( ):=
Standard deviations after decorrelationstd3.52
2.5
=stdstdev M
8 ( )
stdev M9 ( )
:=
Mi 9,
Mi 8,
cos r( )
sin r( )
sin r( )
cos r( )
Mi 7,
Mi 6,
:=
6.2 Calculation of decorrelated position coordinates
degd 3.6=d r
180
:=
radr 0.06270642=r1
2
atan2 r h
r2 h2
:=
Rotation angle for decorrelation
-
8/4/2019 Mathcad Professional - Navgen20 DARIO Ac12 001
8/10
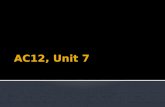
Coordinates of 95% error ellipse
2.448 r 6.14=
2.448 h 8.6=ut
vt
cos r( )
sin r( )
sin r( )
cos r( )
2.448 r cos t100
2.448 h sint
100
Lk
Bk
+:= r
h0.71=
r 0.06=
d 3.6=
10 8 6 4 2 0 2 4 6 8 1010
8
6
4
2
0
2
4
6
8
10
Mi 6, Bk+
yt
vt
Mi 7, Lk+ xt, ut,
Random errors of individual position measurements, error circle
CEP95 and 95% error ellipse. Origin: reference position
2006/11/04 ###
-
8/4/2019 Mathcad Professional - Navgen20 DARIO Ac12 001
9/10
-
8/4/2019 Mathcad Professional - Navgen20 DARIO Ac12 001
10/10