Mark's early work on Synchronization
6
Synchronization in Oscillator Networks and Smart Grids Francesco Bullo Center for Control, Dynamical Systems & Computation University of California at Santa Barbara http://motion.me.ucsb.edu SpongFest Erik Jonsson School of Engineering & Computer Science University of Texas at Dallas, 5 November 2012 Florian D¨ orfler & FB (UCSB) Synchronization of Kuramoto Oscillators UT Dallas 5nov2012 1 / 19 References and Acknowledgments Florian D¨ orfler Collaborators: Misha Chertkov (LANL) and John Simpson-Porco (UCSB) Funding: NSF CyberPhysical Program, CNS-1135819 [1] F. D¨ orfler and F. Bullo. On the critical coupling for Kuramoto oscillators. SIAM Journal on Applied Dynamical Systems, 10(3):1070–1099, 2011 [2] F. D¨ orfler and F. Bullo. Synchronization and transient stability in power networks and non-uniform Kuramoto oscillators. SIAM Journal on Control and Optimization, 50(3):1616–1642, 2012 [3] F. D¨ orfler, M. Chertkov, and F. Bullo. Synchronization in complex oscillator networks and smart grids. Proceedings of the National Academy of Sciences, May 2012. To appear [4] F. D¨ orfler and F. Bullo. Kron reduction of graphs with applications to electrical networks. IEEE Transactions on Circuits and Systems I, November 2011. To appear Florian D¨ orfler & FB (UCSB) Synchronization of Kuramoto Oscillators UT Dallas 5nov2012 2 / 19 Mark’s early work on Synchronization Nikhil and Mark identified the importance of synchronication in multi-agent systems for the control community in 2005. In 2006, Mark gave a wonderful talk at TokyoTech and plenary at the IFAC Workshop on Lagrangian & Hamiltonian Methods in Nagoya. Nikhil and Mark identified the connection between Kuramoto oscillators and consensus algorithms in proving expontial synchronization. [1] N. Chopra and M. W. Spong. On synchronization of networked passive systems with time delays and application to bilateral teleoperation. In Annual Conference of Society of Instrument and Control Engineers of Japan, Okayama, Japan, 2005 [2] M. W. Spong and N. Chopra. Synchronization of networked Lagrangian systems. In Lagrangian and Hamiltonian Methods for Nonlinear Control 2006, volume 366 of Lecture Notes in Control and Information Sciences, pages 47–59. Springer, 2007 [3] N. Chopra and M. W. Spong. On exponential synchronization of Kuramoto oscillators. IEEE Transac- tions on Automatic Control, 54(2):353–357, 2009 Florian D¨ orfler & FB (UCSB) Synchronization of Kuramoto Oscillators UT Dallas 5nov2012 3 / 19 Outline 1 Coupled oscillators and synchronization problems 2 Main results: synchronization tests 3 Intuition and Proofs 4 Conclusions Florian D¨ orfler & FB (UCSB) Synchronization of Kuramoto Oscillators UT Dallas 5nov2012 4 / 19
Transcript of Mark's early work on Synchronization

Synchronization in Oscillator Networks and Smart Grids
Francesco Bullo
Center for Control,Dynamical Systems & Computation
University of California at Santa Barbara
http://motion.me.ucsb.edu
SpongFestErik Jonsson School of Engineering & Computer Science
University of Texas at Dallas, 5 November 2012
Florian Dorfler & FB (UCSB) Synchronization of Kuramoto Oscillators UT Dallas 5nov2012 1 / 19
References and Acknowledgments
Florian Dorfler
Collaborators: Misha Chertkov (LANL) andJohn Simpson-Porco (UCSB)
Funding: NSF CyberPhysical Program, CNS-1135819
[1] F. Dorfler and F. Bullo. On the critical coupling for Kuramoto oscillators. SIAM Journal on AppliedDynamical Systems, 10(3):1070–1099, 2011
[2] F. Dorfler and F. Bullo. Synchronization and transient stability in power networks and non-uniformKuramoto oscillators. SIAM Journal on Control and Optimization, 50(3):1616–1642, 2012
[3] F. Dorfler, M. Chertkov, and F. Bullo. Synchronization in complex oscillator networks and smart grids.Proceedings of the National Academy of Sciences, May 2012. To appear
[4] F. Dorfler and F. Bullo. Kron reduction of graphs with applications to electrical networks. IEEETransactions on Circuits and Systems I, November 2011. To appear
Florian Dorfler & FB (UCSB) Synchronization of Kuramoto Oscillators UT Dallas 5nov2012 2 / 19
Mark’s early work on Synchronization
Nikhil and Mark identified the importance of synchronication inmulti-agent systems for the control community in 2005.
In 2006, Mark gave a wonderful talk at TokyoTech and plenary at theIFAC Workshop on Lagrangian & Hamiltonian Methods in Nagoya.
Nikhil and Mark identified the connection between Kuramoto oscillatorsand consensus algorithms in proving expontial synchronization.
[1] N. Chopra and M. W. Spong. On synchronization of networked passive systems with time delays andapplication to bilateral teleoperation. In Annual Conference of Society of Instrument and Control Engineersof Japan, Okayama, Japan, 2005
[2] M. W. Spong and N. Chopra. Synchronization of networked Lagrangian systems. In Lagrangian andHamiltonian Methods for Nonlinear Control 2006, volume 366 of Lecture Notes in Control and InformationSciences, pages 47–59. Springer, 2007
[3] N. Chopra and M. W. Spong. On exponential synchronization of Kuramoto oscillators. IEEE Transac-tions on Automatic Control, 54(2):353–357, 2009
Florian Dorfler & FB (UCSB) Synchronization of Kuramoto Oscillators UT Dallas 5nov2012 3 / 19
Outline
1 Coupled oscillators and synchronization problems
2 Main results: synchronization tests
3 Intuition and Proofs
4 Conclusions
Florian Dorfler & FB (UCSB) Synchronization of Kuramoto Oscillators UT Dallas 5nov2012 4 / 19

Power Generation and Transmission Network
10
1
2
34
5
6
7
8
9
1112
13
14
15
16
South ArizonaSoCal
NoCal
PacNW
Canada
North
Montana
Utah
15
512
1110
7
8
9
4
3
1
2
17
18
14
16
19
20
21
24
26
27
28
31
32
34 33
36
38
39 22
35
6
13
30
37
25
29
23
1
10
8
2
3
6
9
4
7
5
F
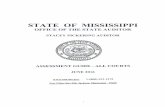
Fig. 9. The New England test system [10], [11]. The system includes10 synchronous generators and 39 buses. Most of the buses have constantactive and reactive power loads. Coupled swing dynamics of 10 generatorsare studied in the case that a line-to-ground fault occurs at point F near bus16.
test system can be represented by
δi = ωi,Hi
πfsωi = −Diωi + Pmi − GiiE
2i −
10∑
j=1,j !=i
EiEj ·
· {Gij cos(δi − δj) + Bij sin(δi − δj)},
(11)
where i = 2, . . . , 10. δi is the rotor angle of generator i withrespect to bus 1, and ωi the rotor speed deviation of generatori relative to system angular frequency (2πfs = 2π × 60Hz).δ1 is constant for the above assumption. The parametersfs, Hi, Pmi, Di, Ei, Gii, Gij , and Bij are in per unitsystem except for Hi and Di in second, and for fs in Helz.The mechanical input power Pmi to generator i and themagnitude Ei of internal voltage in generator i are assumedto be constant for transient stability studies [1], [2]. Hi isthe inertia constant of generator i, Di its damping coefficient,and they are constant. Gii is the internal conductance, andGij + jBij the transfer impedance between generators iand j; They are the parameters which change with networktopology changes. Note that electrical loads in the test systemare modeled as passive impedance [11].
B. Numerical Experiment
Coupled swing dynamics of 10 generators in thetest system are simulated. Ei and the initial condition(δi(0),ωi(0) = 0) for generator i are fixed through powerflow calculation. Hi is fixed at the original values in [11].Pmi and constant power loads are assumed to be 50% at theirratings [22]. The damping Di is 0.005 s for all generators.Gii, Gij , and Bij are also based on the original line datain [11] and the power flow calculation. It is assumed thatthe test system is in a steady operating condition at t = 0 s,that a line-to-ground fault occurs at point F near bus 16 att = 1 s−20/(60Hz), and that line 16–17 trips at t = 1 s. Thefault duration is 20 cycles of a 60-Hz sine wave. The faultis simulated by adding a small impedance (10−7j) betweenbus 16 and ground. Fig. 10 shows coupled swings of rotorangle δi in the test system. The figure indicates that all rotorangles start to grow coherently at about 8 s. The coherentgrowing is global instability.
C. Remarks
It was confirmed that the system (11) in the New Eng-land test system shows global instability. A few comments
0 2 4 6 8 10-5
0
5
10
15
δi /
ra
d
10
02
03
04
05
0 2 4 6 8 10-5
0
5
10
15
δi /
ra
d
TIME / s
06
07
08
09
Fig. 10. Coupled swing of phase angle δi in New England test system.The fault duration is 20 cycles of a 60-Hz sine wave. The result is obtainedby numerical integration of eqs. (11).
are provided to discuss whether the instability in Fig. 10occurs in the corresponding real power system. First, theclassical model with constant voltage behind impedance isused for first swing criterion of transient stability [1]. This isbecause second and multi swings may be affected by voltagefluctuations, damping effects, controllers such as AVR, PSS,and governor. Second, the fault durations, which we fixed at20 cycles, are normally less than 10 cycles. Last, the loadcondition used above is different from the original one in[11]. We cannot hence argue that global instability occurs inthe real system. Analysis, however, does show a possibilityof global instability in real power systems.
IV. TOWARDS A CONTROL FOR GLOBAL SWING
INSTABILITY
Global instability is related to the undesirable phenomenonthat should be avoided by control. We introduce a keymechanism for the control problem and discuss controlstrategies for preventing or avoiding the instability.
A. Internal Resonance as Another Mechanism
Inspired by [12], we here describe the global instabilitywith dynamical systems theory close to internal resonance[23], [24]. Consider collective dynamics in the system (5).For the system (5) with small parameters pm and b, the set{(δ,ω) ∈ S1 × R | ω = 0} of states in the phase plane iscalled resonant surface [23], and its neighborhood resonantband. The phase plane is decomposed into the two parts:resonant band and high-energy zone outside of it. Here theinitial conditions of local and mode disturbances in Sec. IIindeed exist inside the resonant band. The collective motionbefore the onset of coherent growing is trapped near theresonant band. On the other hand, after the coherent growing,it escapes from the resonant band as shown in Figs. 3(b),4(b), 5, and 8(b) and (c). The trapped motion is almostintegrable and is regarded as a captured state in resonance[23]. At a moment, the integrable motion may be interruptedby small kicks that happen during the resonant band. That is,the so-called release from resonance [23] happens, and thecollective motion crosses the homoclinic orbit in Figs. 3(b),4(b), 5, and 8(b) and (c), and hence it goes away fromthe resonant band. It is therefore said that global instability
!"#$%&'''%()(*%(+,-.,*%/012-3*%)0-4%5677*%899: !"#$%&'
(')$
Authorized licensed use limited to: Univ of Calif Santa Barbara. Downloaded on June 10, 2009 at 14:48 from IEEE Xplore. Restrictions apply.
Western US New England
(WECC 16-m, 25-b) (10-m, 13-b)
Florian Dorfler & FB (UCSB) Synchronization of Kuramoto Oscillators UT Dallas 5nov2012 5 / 19
Mathematical Model of a Power Transmission Network
15
512
1110
7
8
9
4
3
1
2
17
18
14
16
19
20
21
24
26
27
28
31
32
34 33
36
38
39 22
35
6
13
30
37
25
29
23
1
10
8
2
3
6
9
4
7
5
F
Fig. 9. The New England test system [10], [11]. The system includes10 synchronous generators and 39 buses. Most of the buses have constantactive and reactive power loads. Coupled swing dynamics of 10 generatorsare studied in the case that a line-to-ground fault occurs at point F near bus16.
test system can be represented by
δi = ωi,Hi
πfsωi = −Diωi + Pmi − GiiE
2i −
10∑
j=1,j !=i
EiEj ·
· {Gij cos(δi − δj) + Bij sin(δi − δj)},
(11)
where i = 2, . . . , 10. δi is the rotor angle of generator i withrespect to bus 1, and ωi the rotor speed deviation of generatori relative to system angular frequency (2πfs = 2π × 60Hz).δ1 is constant for the above assumption. The parametersfs, Hi, Pmi, Di, Ei, Gii, Gij , and Bij are in per unitsystem except for Hi and Di in second, and for fs in Helz.The mechanical input power Pmi to generator i and themagnitude Ei of internal voltage in generator i are assumedto be constant for transient stability studies [1], [2]. Hi isthe inertia constant of generator i, Di its damping coefficient,and they are constant. Gii is the internal conductance, andGij + jBij the transfer impedance between generators iand j; They are the parameters which change with networktopology changes. Note that electrical loads in the test systemare modeled as passive impedance [11].
B. Numerical Experiment
Coupled swing dynamics of 10 generators in thetest system are simulated. Ei and the initial condition(δi(0),ωi(0) = 0) for generator i are fixed through powerflow calculation. Hi is fixed at the original values in [11].Pmi and constant power loads are assumed to be 50% at theirratings [22]. The damping Di is 0.005 s for all generators.Gii, Gij , and Bij are also based on the original line datain [11] and the power flow calculation. It is assumed thatthe test system is in a steady operating condition at t = 0 s,that a line-to-ground fault occurs at point F near bus 16 att = 1 s−20/(60Hz), and that line 16–17 trips at t = 1 s. Thefault duration is 20 cycles of a 60-Hz sine wave. The faultis simulated by adding a small impedance (10−7j) betweenbus 16 and ground. Fig. 10 shows coupled swings of rotorangle δi in the test system. The figure indicates that all rotorangles start to grow coherently at about 8 s. The coherentgrowing is global instability.
C. Remarks
It was confirmed that the system (11) in the New Eng-land test system shows global instability. A few comments
0 2 4 6 8 10-5
0
5
10
15
δi /
ra
d
10
02
03
04
05
0 2 4 6 8 10-5
0
5
10
15
δi /
ra
d
TIME / s
06
07
08
09
Fig. 10. Coupled swing of phase angle δi in New England test system.The fault duration is 20 cycles of a 60-Hz sine wave. The result is obtainedby numerical integration of eqs. (11).
are provided to discuss whether the instability in Fig. 10occurs in the corresponding real power system. First, theclassical model with constant voltage behind impedance isused for first swing criterion of transient stability [1]. This isbecause second and multi swings may be affected by voltagefluctuations, damping effects, controllers such as AVR, PSS,and governor. Second, the fault durations, which we fixed at20 cycles, are normally less than 10 cycles. Last, the loadcondition used above is different from the original one in[11]. We cannot hence argue that global instability occurs inthe real system. Analysis, however, does show a possibilityof global instability in real power systems.
IV. TOWARDS A CONTROL FOR GLOBAL SWING
INSTABILITY
Global instability is related to the undesirable phenomenonthat should be avoided by control. We introduce a keymechanism for the control problem and discuss controlstrategies for preventing or avoiding the instability.
A. Internal Resonance as Another Mechanism
Inspired by [12], we here describe the global instabilitywith dynamical systems theory close to internal resonance[23], [24]. Consider collective dynamics in the system (5).For the system (5) with small parameters pm and b, the set{(δ,ω) ∈ S1 × R | ω = 0} of states in the phase plane iscalled resonant surface [23], and its neighborhood resonantband. The phase plane is decomposed into the two parts:resonant band and high-energy zone outside of it. Here theinitial conditions of local and mode disturbances in Sec. IIindeed exist inside the resonant band. The collective motionbefore the onset of coherent growing is trapped near theresonant band. On the other hand, after the coherent growing,it escapes from the resonant band as shown in Figs. 3(b),4(b), 5, and 8(b) and (c). The trapped motion is almostintegrable and is regarded as a captured state in resonance[23]. At a moment, the integrable motion may be interruptedby small kicks that happen during the resonant band. That is,the so-called release from resonance [23] happens, and thecollective motion crosses the homoclinic orbit in Figs. 3(b),4(b), 5, and 8(b) and (c), and hence it goes away fromthe resonant band. It is therefore said that global instability
!"#$%&'''%()(*%(+,-.,*%/012-3*%)0-4%5677*%899: !"#$%&'
(')$
Authorized licensed use limited to: Univ of Calif Santa Barbara. Downloaded on June 10, 2009 at 14:48 from IEEE Xplore. Restrictions apply.
2
10
30 25
8
37
29
9
38
23
7
36
22
6
35
19
4
3320
5
34
10
3
32
6
2
31
1
8
7
5
4
3
18
17
26
2728
24
21
16
1514
13
12
11
1
39
9
1 n generators �� and m load buses •◦2 admittance matrix Y ∈ C(n+m)×(n+m), symmetric, sparse, lossless
Central task: generators provide power for loads
Problems: monitoring and stability in face of disturbances andcontingencies
Florian Dorfler & FB (UCSB) Synchronization of Kuramoto Oscillators UT Dallas 5nov2012 6 / 19
Mathematical Model of a Power Transmission Network
1 power transfer on line i j : |Vi ||Vj ||Yij |︸ ︷︷ ︸aij=max power transfer
· sin(θi − θj
)
2 power balance at node i : Pi︸︷︷︸power injection
=∑
jaij sin(θi − θj)
Florian Dorfler & FB (UCSB) Synchronization of Kuramoto Oscillators UT Dallas 5nov2012 7 / 19
Mathematical Model of a Power Transmission Network
1 power transfer on line i j : |Vi ||Vj ||Yij |︸ ︷︷ ︸aij=max power transfer
· sin(θi − θj
)
2 power balance at node i : Pi︸︷︷︸power injection
=∑
jaij sin(θi − θj)
Structure-Preserving Model [Bergen & Hill ’81]
for ��, swing eq with Pi > 0 Mi θi + Di θi = Pi −∑
jaij sin(θi − θj)
for •◦, const Pi < 0 and Di ≥ 0 Di θi = Pi −∑
jaij sin(θi − θj)
2
10
30 25
8
37
29
9
38
23
7
36
22
6
35
19
4
3320
5
34
10
3
32
6
2
31
1
8
7
5
4
3
18
17
26
2728
24
21
16
1514
13
12
11
1
39
9
Frequency Instability Problems in North American Interconnections
6
2 Technical Aspects of the Frequency Stability Issue
2.1 Physics of Power Balancing and Frequency Stability
Electrical power demand and power supply must be continuously balanced. If the demand and supply are not balanced, or if there is not enough stored energy11
Almost all alternating current (AC) power is generated by synchronous generators controlled to produce 60 Hz electricity. When generated power exactly matches power demand, the frequency could be either a nominal 60 Hz or in its vicinity, but it would be stable (
in the system to temporarily supply the imbalance, generation and demand equipment can be damaged and the entire system could collapse. A power imbalance occurs as a result of a mismatch between generation and load. While there are minor mismatches that exist on the grid most of the time, significant imbalances in either magnitude or time span can be catastrophic for a power system (e.g., result in system black outs and/or equipment damage).
Exhibit 2-1). Unless an imbalance between generation and demand is quickly mitigated, frequency could decrease to 0 Hz in a case of demand exceeding generation or increase until equipment is damaged in a case of generation exceeding demand. Even a very small, but long-lasting power mismatch can cause a significant decrease in frequency.
Exhibit 2-1 Power Balance
Data Source: EPRI 12
The four interconnections, discussed in the Introduction, are connected using high voltage direct current (HVDC) links. The HVDC links allow each interconnection to have a different frequency, while the frequency inside an interconnection is the same for any point in that system. For example, the frequency in Los Angeles, CA, can be different from the frequency in Bangor, ME, yet the Bangor frequency is the same as the frequency in Miami, FL. This also means that imbalances in Bangor should not affect Los Angeles frequency but could potentially affect frequency in Miami, since they are in the same interconnection. All four interconnections try to
11 Either passive storage, such as a battery, or kinetic energy within the power system could offset the power imbalance. 12 EPRI, Power System Dynamics Tutorial, Final Report, Palo Alto, California, July 2009.
POWER CONSUMED POWER SUPPLIED
60 61 59
62 58
Hz
Load Export Losses
Generation Imports
Florian Dorfler & FB (UCSB) Synchronization of Kuramoto Oscillators UT Dallas 5nov2012 7 / 19

Synchronization in Power Networks
1 power networks are coupled oscillators
Mi θi + Di θi = Pi −∑
jaij sin(θi − θj)
Di θi = Pi −∑
jaij sin(θi − θj)
2 synchronization: coupling strength vs. frequency non-uniformity⌧1
⌧3
⌧2a12
a13
a14
⌧4S1
3 graph theory: “coupling/connectivity” and “non-uniformity”
power networks should synchronizefor large “coupling/connectivity” and small “non-uniformity”
Florian Dorfler & FB (UCSB) Synchronization of Kuramoto Oscillators UT Dallas 5nov2012 8 / 19
Coupled Oscillators in Science and Technology
Kuramoto model of coupled oscillators:
θi = ωi −∑n
j=1aij sin(θi − θj)
Sync in Josephson junctions [S. Watanabe et. al ’97, K. Wiesenfeld et al. ’98]
Sync in a population of fireflies [G.B. Ermentrout ’90, Y. Zhou et al. ’06]
Coordination of particle models[R. Sepulchre et al. ’07, D. Klein et al. ’09]
Deep-brain stimulation and neuroscience[P.A. Tass ’03, E. Brown et al. ’04]
Countless other sync phenomena[A. Winfree ’67, S.H. Strogatz ’00, J. Acebron ’01]
Florian Dorfler & FB (UCSB) Synchronization of Kuramoto Oscillators UT Dallas 5nov2012 9 / 19
Synchronization Notions
θi = ωi −∑n
j=1aij sin(θi − θj)
1 phase cohesive: |θi (t)− θj(t)| < γfor small γ < π/2 ... arc invariance
2 frequency synchrony: θi (t) = θj(t)
3 phase synchrony: θi (t) = θj(t)
Detour – Kron reduction of graphs
2
1
0
3
0
2
5
8
3
7
2
9
9
3
8
2
3
7
3
6
2
2
6
3
5
1
9
4
3
3
2
0
5
3
4
1
0
3
3
2
6
2
3
1
1
8
7
5
4
3
1
8
1
7
2
6
2
7 2
8
2
4
2
1
1
6
1
5
1
4
1
3
1
2
1
1
1
3
9
9
YnetworkYreduced =Ynetwork/Y interior
2
3
0
2
5
3
7
2
9
3
8
2
3
3
6
2
2
3
5
1
9
3
3
2
0
3
4
1
0
3
2
63
1
1
8
7
5
4
3
1
8
1
7
2
6
2
7 2
8
2
4
2
1
1
6
1
5
1
4
1
3
1
2
1
1
3
9
9
1
0
9
7
6
4
5
3
2
1
8
Some properties of the Kron reduction process:
1 Well-posedness: Symmetric & irreducible (loopy) Laplacian matricescan be reduced and are closed under Kron reduction
2 Topological properties:
interior network connected ⇒ reduced network complete
at least one node in interior network features a self-loop !
⇒ all nodes in reduced network feature self-loops !
3 Algebraic properties: self-loops in interior network . . .
decrease mutual coupling in reduced network
increase self-loops in reduced network
Florian Dorfler (UCSB) Power Networks Synchronization Advancement to Candidacy 31 / 36
Detour – Kron reduction of graphs
2
1
0
3
0
2
5
8
3
7
2
9
9
3
8
2
3
7
3
6
2
2
6
3
5
1
9
4
3
3
2
0
5
3
4
1
0
3
3
2
6
2
3
1
1
8
7
5
4
3
1
8
1
7
2
6
2
7 2
8
2
4
2
1
1
6
1
5
1
4
1
3
1
2
1
1
1
3
9
9
YnetworkYreduced =Ynetwork/Y interior
2
3
0
2
5
3
7
2
9
3
8
2
3
3
6
2
2
3
5
1
9
3
3
2
0
3
4
1
0
3
2
63
1
1
8
7
5
4
3
1
8
1
7
2
6
2
7 2
8
2
4
2
1
1
6
1
5
1
4
1
3
1
2
1
1
3
9
9
1
0
9
7
6
4
5
3
2
1
8
Some properties of the Kron reduction process:
1 Well-posedness: Symmetric & irreducible (loopy) Laplacian matricescan be reduced and are closed under Kron reduction
2 Topological properties:
interior network connected ⇒ reduced network complete
at least one node in interior network features a self-loop !
⇒ all nodes in reduced network feature self-loops !
3 Algebraic properties: self-loops in interior network . . .
decrease mutual coupling in reduced network
increase self-loops in reduced network
Florian Dorfler (UCSB) Power Networks Synchronization Advancement to Candidacy 31 / 36
Detour – Kron reduction of graphs
2
1
0
3
0
2
5
8
3
7
2
9
9
3
8
2
3
7
3
6
2
2
6
3
5
1
9
4
3
3
2
0
5
3
4
1
0
3
3
2
6
2
3
1
1
8
7
5
4
3
1
8
1
7
2
6
2
7 2
8
2
4
2
1
1
6
1
5
1
4
1
3
1
2
1
1
1
3
9
9
YnetworkYreduced =Ynetwork/Y interior
2
3
0
2
5
3
7
2
9
3
8
2
3
3
6
2
2
3
5
1
9
3
3
2
0
3
4
1
0
3
2
63
1
1
8
7
5
4
3
1
8
1
7
2
6
2
7 2
8
2
4
2
1
1
6
1
5
1
4
1
3
1
2
1
1
3
9
9
1
0
9
7
6
4
5
3
2
1
8
Some properties of the Kron reduction process:
1 Well-posedness: Symmetric & irreducible (loopy) Laplacian matricescan be reduced and are closed under Kron reduction
2 Topological properties:
interior network connected ⇒ reduced network complete
at least one node in interior network features a self-loop !
⇒ all nodes in reduced network feature self-loops !
3 Algebraic properties: self-loops in interior network . . .
decrease mutual coupling in reduced network
increase self-loops in reduced network
Florian Dorfler (UCSB) Power Networks Synchronization Advancement to Candidacy 31 / 36
{aij}{i ,j}∈E small & |ωi − ωj | large =⇒ no synchronization
{aij}{i ,j}∈E large & |ωi − ωj | small =⇒ cohesive + freq sync
Challenge: proper notions of sync, coupling & phase transition[A. Jadbabaie et al. ’04, P. Monzon et al. ’06, Sepulchre et al. ’07, S.J. Chung et al. ’10, J.L.
van Hemmen et al. ’93, F. de Smet et al. ’07, N. Chopra et al. ’09, G. Schmidt et al. ’09, F.
Dorfler et al. ’09 & ’11, S.J. Chung et al. ’10, A. Franci et al. ’10, S.Y. Ha et al. ’10, D. Aeyels
et al. ’04, R.E. Mirollo et al. ’05, M. Verwoerd et al. ’08, L. DeVille ’11, . . . ]
Florian Dorfler & FB (UCSB) Synchronization of Kuramoto Oscillators UT Dallas 5nov2012 10 / 19
Outline
1 Coupled oscillators and synchronization problems
2 Main results: synchronization tests
3 Intuition and Proofs
4 Conclusions
Florian Dorfler & FB (UCSB) Synchronization of Kuramoto Oscillators UT Dallas 5nov2012 11 / 19

Primer on Algebraic Graph Theory
Graph: weights aij > 0 on edges {i , j}, values xi at nodes i
adjacency matrix A = (aij)
degree matrix D is diagonal with dii =∑n
j=1 aij
Laplacian matrix L = LT = D − A ≥ 0(pseudo-inverse of L = same eigenvectors, inverse eigenvalues)
Notions of Connectivitytopological: connectivity, average and worst-case path lengthsspectral: second smallest eigenvalue λ2 of L is “algebraic connectivity”
Notions of Dissimilarity
‖x‖∞,edges = max{i ,j} |xi − xj |, ‖x‖2,edges =(∑
{i ,j} |xi − xj |2)1/2
(graph edges {i , j} ∈ E) or (all edges {i , j} satisfy i < j)
Florian Dorfler & FB (UCSB) Synchronization of Kuramoto Oscillators UT Dallas 5nov2012 12 / 19
Sync Tests: Coupling vs. Power Imbalance
Mi θi + Di θi = Pi −∑
jaij sin(θi − θj)
Di θi = Pi −∑
jaij sin(θi − θj)
∑j aij ≤ |Pi | =⇒ no sync λ2(L) > ‖P‖2,all edges =⇒ sync
Valid for: completely arbitrary weighted connected graphs
∥∥L†P∥∥∞,graph edges
< 1 ⇐⇒ sync
Correct for: trees, graphs with disjoint 3- and 4-cyclesCorrect for: graphs with L†P bipolar or symmetricCorrect for :∗ homogeneous graphs (aij = K > 0)
best general conditions known to dateFlorian Dorfler & FB (UCSB) Synchronization of Kuramoto Oscillators UT Dallas 5nov2012 13 / 19
A Nearly Exact Synchronization Condition – Accuracy
Randomized power network test caseswith 50 % randomized loads and 33 % randomized generation
Randomized test case Correctness of condition: Accuracy of condition: Phase
(1000 instances) ‖L†P‖∞,g. edges≤ sin(γ) max{i,j}|θ∗i − θ∗j | cohesiveness:
⇒ max{i,j}∈E
|θ∗i − θ∗j | ≤ γ − arcsin(‖BT L†P‖∞) max{i,j}∈E
|θ∗i − θ∗j |
9 bus system always true 4.1218 · 10−5 rad 0.12889 rad
IEEE 14 bus system always true 2.7995 · 10−4 rad 0.16622 rad
IEEE RTS 24 always true 1.7089 · 10−3 rad 0.22309 rad
IEEE 30 bus system always true 2.6140 · 10−4 rad 0.1643 rad
New England 39 always true 6.6355 · 10−5 rad 0.16821 rad
IEEE 57 bus system always true 2.0630 · 10−2 rad 0.20295 rad
IEEE RTS 96 always true 2.6076 · 10−3 rad 0.24593 rad
IEEE 118 bus system always true 5.9959 · 10−4 rad 0.23524 rad
IEEE 300 bus system always true 5.2618 · 10−4 rad 0.43204 rad
Polish 2383 bus system always true 4.2183 · 10−3 rad 0.25144 rad(winter peak 1999/2000)
condition∥∥L†P
∥∥∞,graph edges
≤ sin(γ) is extremely accurate
Florian Dorfler & FB (UCSB) Synchronization of Kuramoto Oscillators UT Dallas 5nov2012 14 / 19
Outline
1 Coupled oscillators and synchronization problems
2 Main results: synchronization tests
3 Intuition and Proofs
4 Conclusions
Florian Dorfler & FB (UCSB) Synchronization of Kuramoto Oscillators UT Dallas 5nov2012 15 / 19

Synchronization in a All-to-All Homogeneous Graph
all-to-all homogeneous graph θi = ωi−K
n
∑n
j=1sin(θi−θj)
Explicit, necessary, and sufficient condition [F. Dorfler & F. Bullo ’10]
Following statements are equivalent:
1 Coupling dominates non-uniformity, i.e., K > Kcritical , ωmax − ωmin
2 Kuramoto models with {ω1, . . . , ωn} ⊆ [ωmin, ωmax] achieve phasecohesiveness & exponential frequency synchronization
Florian Dorfler & FB (UCSB) Synchronization of Kuramoto Oscillators UT Dallas 5nov2012 16 / 19
Synchronization in a All-to-All Homogeneous Graph
all-to-all homogeneous graph θi = ωi−K
n
∑n
j=1sin(θi−θj)
Explicit, necessary, and sufficient condition [F. Dorfler & F. Bullo ’10]
Following statements are equivalent:
1 Coupling dominates non-uniformity, i.e., K > Kcritical , ωmax − ωmin
2 Kuramoto models with {ω1, . . . , ωn} ⊆ [ωmin, ωmax] achieve phasecohesiveness & exponential frequency synchronization
Define γmin & γmax by Kcritical/K = sin(γmin) = sin(γmax), then
1) phase cohesiveness for all arc-lengths γ ∈ [γmin, γmax]
2) practical phase synchronization: from γmax arc → γmin arc
3) exponential frequency synchronization in the interior of γmax arc
Florian Dorfler & FB (UCSB) Synchronization of Kuramoto Oscillators UT Dallas 5nov2012 16 / 19
Main proof ideas (Nikhil’s and Mark’s work)
1 Cohesiveness:
V (θ(t)) • for θ(0) in arc of length γ ∈ [γmin, γmax], definearc-length cost function
V (θ(t)) = max{|θi (t)− θj(t)|}i ,j∈{1,...,n}
• t 7→ V (θ(t)) is non-increasing because
D+V (θ(t)) < 0
• t 7→ θ(t) remains in (possibly-rotating) arc oflength γ and, moreover, γ < π/2 in finite time
2 Frequency synchronization: once in arc of length π/2
d
dtθi = −
∑j 6=i
aij(t)(θi − θj)where aij(t) = K
n cos(θi (t)− θj(t)) > 0. result follows fromtime-varying consensus theorem
Florian Dorfler & FB (UCSB) Synchronization of Kuramoto Oscillators UT Dallas 5nov2012 17 / 19
Outline
1 Coupled oscillators and synchronization problems
2 Main results: synchronization tests
3 Intuition and Proofs
4 Conclusions
Florian Dorfler & FB (UCSB) Synchronization of Kuramoto Oscillators UT Dallas 5nov2012 18 / 19

Conclusions
Summary:
1 connection between power networks and coupled Kuramoto oscillators
2 necessary and sufficient sync conditions
Ongoing and future work:
1 more realistic models: active+reactive power flow
2 sharp condition: tests and proofs
3 region of attraction
4 smart-grid apps = remedial action, wide-area control
IEEE CDC ’12: Tutorial Session on Coupled OscillatorsF. Dorfler and F. Bullo. Exploring synchronization in complex oscillator networks. InIEEE Conf. on Decision and Control, Maui, HI, USA, December 2012. To appear
Florian Dorfler & FB (UCSB) Synchronization of Kuramoto Oscillators UT Dallas 5nov2012 19 / 19