"Making Existing Cars Smart Via Embedded Vision and Deep Learning," a Presentation from NAUTO
16
Copyright © 2016 NAUTO 1 Making Existing Cars Smart Via Embedded Vision and Deep Learning Dr. Stefan Heck, CEO, NAUTO, Inc. May 2, 2016
-
Upload
embedded-vision-alliance -
Category
Technology
-
view
323 -
download
6
Transcript of "Making Existing Cars Smart Via Embedded Vision and Deep Learning," a Presentation from NAUTO

Copyright © 2016 NAUTO 1
Making Existing Cars Smart Via
Embedded Vision and Deep Learning Dr. Stefan Heck, CEO, NAUTO, Inc.
May 2, 2016
Copyright © 2016 NAUTO 2
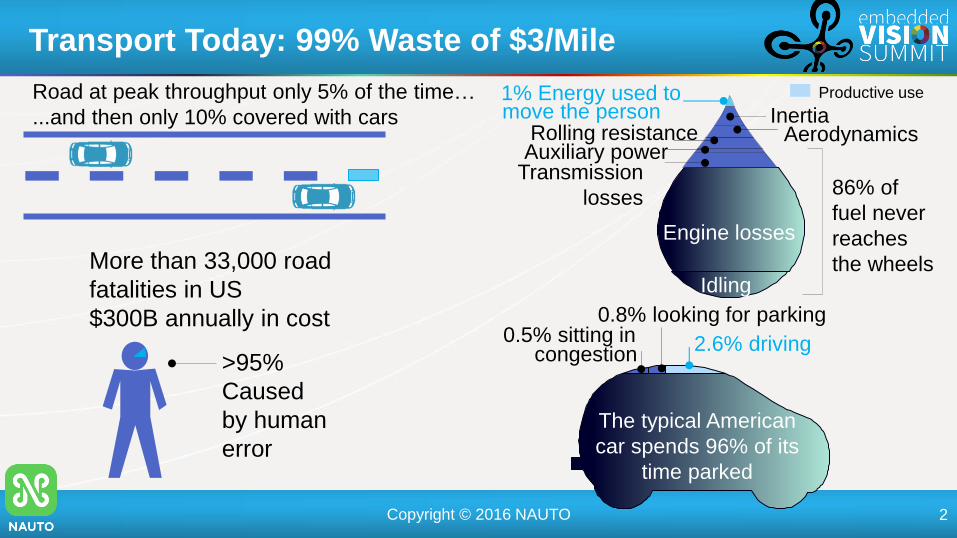
Transport Today: 99% Waste of $3/Mile
Productive use
2.6% driving
0.8% looking for parking 0.5% sitting in
congestion
The typical American
car spends 96% of its
time parked
86% of
fuel never
reaches
the wheels
Rolling resistance
1% Energy used to move the person
Aerodynamics
Transmission
losses
Idling
Engine losses
Inertia
Auxiliary power
More than 33,000 road
fatalities in US
$300B annually in cost
>95%
Caused
by human
error
Road at peak throughput only 5% of the time…
...and then only 10% covered with cars

Copyright © 2016 NAUTO 3
The Fix: Part 1
Autonomous: 90% accident reduction
Connected: Time, route, and fleet
& mode optimization
Shared: 50% utilization
(70% if used for
delivery at night?)
Electric: 85% efficient
drivetrain

Copyright © 2016 NAUTO 4
The Fix Part 2:
Autonomous: 90% accident reduction
Shared: 50% utilization
(70% with
delivery at night?)
Electric: 85% efficient
drivetrain
Autonomous
maintenance
& charging
Peloton or 8x
capacity
autonomous
HOV lanes
Smart Autoroute
No up -front
cost for
batteries
Use only size
car & battery
you need
Match open trips & 2 minute service
Intermodal hub connections
ACES Connected:
Time, route, and fleet
& mode optimization
8 Cents per Mile!

Copyright © 2016 NAUTO 5
A Fork in
the Road to
Autonomy

Copyright © 2016 NAUTO 6
• A: Augment human
perception for safety
• C: Each car learns
from every other car
• E: Solve parking,
braking, congestion
• S: Sharing easier if you know
who is driving and how
What if there were a third way?
60-80% of
benefits
in
2 years

Copyright © 2016 NAUTO 7
Fleet App Driver App Insurance API
The Quick Fix: the NAUTO upgrade path!
Copyright © 2016 NAUTO 8
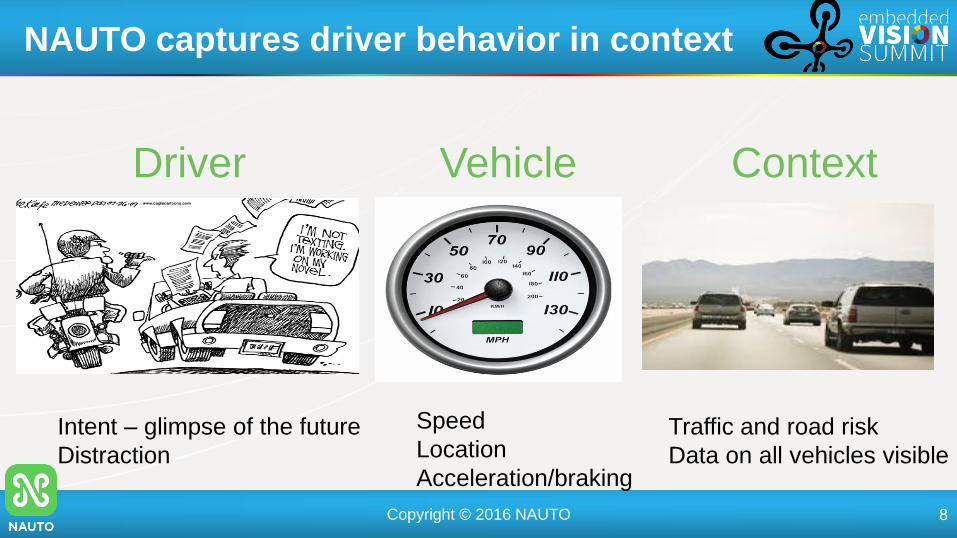
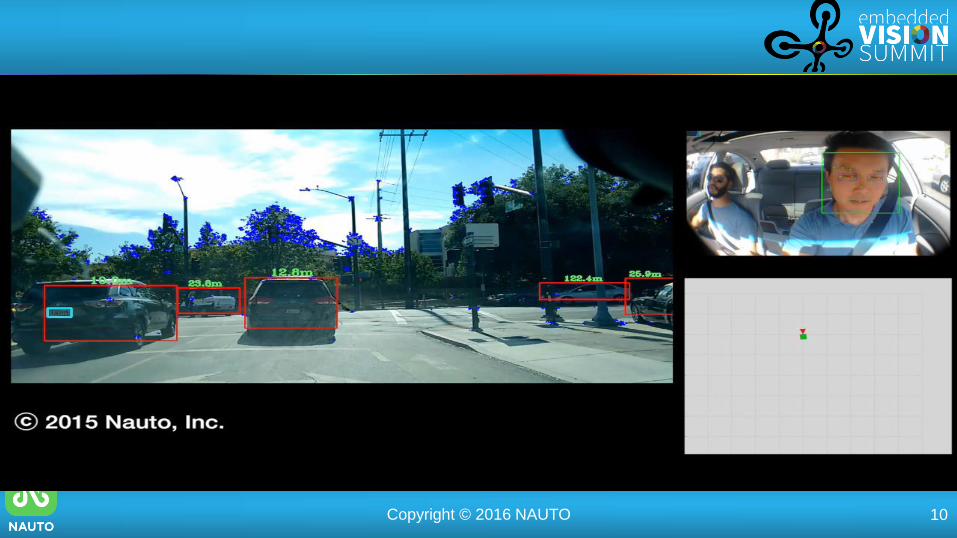
NAUTO captures driver behavior in context
Driver Vehicle Context
Speed
Location
Acceleration/braking
Intent – glimpse of the future
Distraction
Traffic and road risk
Data on all vehicles visible
Copyright © 2016 NAUTO 9
-
1
2
3
4
5
6
7
8
1 2 3 4 5 6 7 8 9 10Index o
f Loss / C
olli
sio
ns
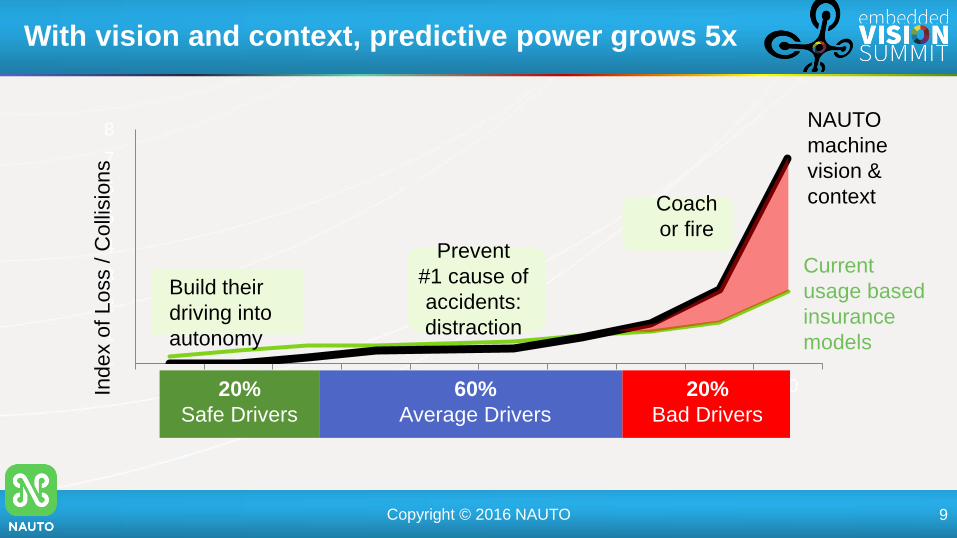
Coach
or fire Prevent
#1 cause of
accidents:
distraction
Build their
driving into
autonomy
20%
Safe Drivers
20%
Bad Drivers
60%
Average Drivers
With vision and context, predictive power grows 5x
Current
usage based
insurance
models
NAUTO
machine
vision &
context
Copyright © 2016 NAUTO 10
Copyright © 2016 NAUTO 11
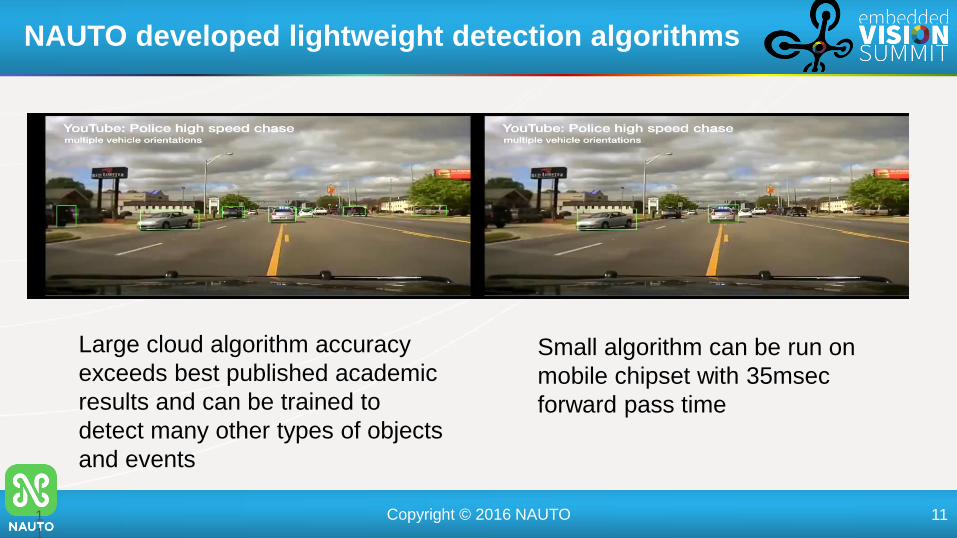
NAUTO developed lightweight detection algorithms
1
1
Large cloud algorithm accuracy
exceeds best published academic
results and can be trained to
detect many other types of objects
and events
Small algorithm can be run on
mobile chipset with 35msec
forward pass time

Copyright © 2016 NAUTO 12
Directly detect #1 cause of crashes

Copyright © 2016 NAUTO 13
NAUTO: all-weather, any environment
Copyright © 2016 NAUTO 14
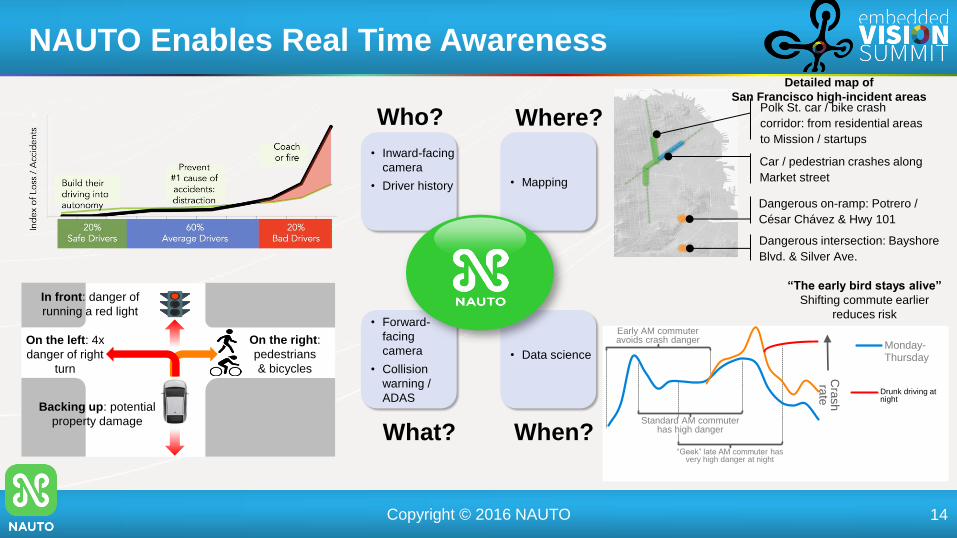
Where?
“The early bird stays alive”
Shifting commute earlier
reduces risk
When?
NAUTO Enables Real Time Awareness
What?
Who?
• Forward-
facing
camera
• Collision
warning /
ADAS
“Geek” late AM commuter has very high danger at night
• Inward-facing
camera
• Driver history • Mapping
On the left: 4x
danger of right
turn
On the right:
pedestrians
& bicycles
In front: danger of
running a red light
Backing up: potential
property damage
Car / pedestrian crashes along
Market street
Dangerous on-ramp: Potrero /
César Chávez & Hwy 101
Dangerous intersection: Bayshore
Blvd. & Silver Ave.
Polk St. car / bike crash
corridor: from residential areas
to Mission / startups
Detailed map of
San Francisco high-incident areas
Monday-Thursday
Cra
sh
ra
te
Early AM commuter avoids crash danger
Standard AM commuter has high danger
• Data science
Drunk driving at night
Copyright © 2016 NAUTO 15
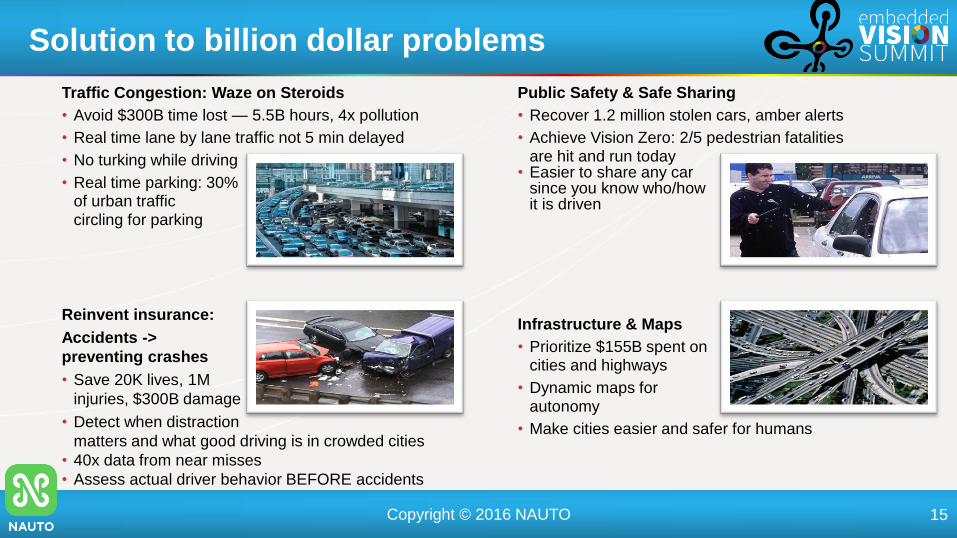
Solution to billion dollar problems
Traffic Congestion: Waze on Steroids
• Avoid $300B time lost — 5.5B hours, 4x pollution
• Real time lane by lane traffic not 5 min delayed
• No turking while driving
• Real time parking: 30% of urban traffic circling for parking
Reinvent insurance:
Accidents ->
preventing crashes
• Save 20K lives, 1M
injuries, $300B damage
• Detect when distraction
matters and what good driving is in crowded cities
• 40x data from near misses
• Assess actual driver behavior BEFORE accidents
Public Safety & Safe Sharing
• Recover 1.2 million stolen cars, amber alerts
• Achieve Vision Zero: 2/5 pedestrian fatalities are hit and run today
• Easier to share any car since you know who/how it is driven
Infrastructure & Maps
• Prioritize $155B spent on cities and highways
• Dynamic maps for autonomy
• Make cities easier and safer for humans

Copyright © 2016 NAUTO 16
Contact:
Stefan Heck
CEO, NAUTO, Inc.