ma chap 1
29
Convolutional Code Performance ECEN 5682 Theory and Practice of Error Control Codes Convolutional Code Performance Peter Mathys University of Colorado Spring 2007 Peter Mathys ECEN 5682 Theory and Practice of Error Control Codes
-
Upload
thu-nguyen -
Category
Documents
-
view
218 -
download
0
description
mo phong
Transcript of ma chap 1

Convolutional Code Performance
ECEN 5682 Theory and Practice of Error ControlCodes
Convolutional Code Performance
Peter Mathys
University of Colorado
Spring 2007
Peter Mathys ECEN 5682 Theory and Practice of Error Control Codes

Convolutional Code Performance Performance Measures
Performance Measures
Definition: A convolutional encoder which maps one or more datasequences of infinite weight into code sequences of finite weight iscalled a catastrophic encoder.
Example: Encoder #5. The binary R = 1/2, K = 3 convolutionalencoder with transfer function matrix
G(D) =[1 + D 1 + D2
],
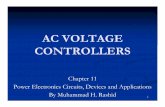
has the encoder state diagram shown in Figure 15, with statesS0 = 00, S1 = 10, S2 = 01, and S3 = 11.
Peter Mathys ECEN 5682 Theory and Practice of Error Control Codes

Convolutional Code Performance Performance Measures
S0
S1
S2
S3
Fig.15 Encoder State Diagram for Catastrophic R = 1/2, K = 3 Encoder
1/11 1/01
0/110/01
0/101/100/00 1/00
Peter Mathys ECEN 5682 Theory and Practice of Error Control Codes

Convolutional Code Performance Performance Measures
• • • • • • • • •
• •
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
S0
S1
S2
S3
· · ·
Fig.16 A Detour of Weight w = 7 and i = 3, Starting at Time t = 0
00 00 00 00 00 00 00 00
11 11 11 11 11 11 11 11
01 01 01 01 01 01 0110 10 10 10 10 10 10
11 11 11 11 11 1100 00 00 00 00 00
10 10 10 10 10 10
01 01 01 01 01 01
11
01
00
10
10
11
Peter Mathys ECEN 5682 Theory and Practice of Error Control Codes

Convolutional Code Performance Performance Measures
Definition: The complete weight distribution {A(w , i , `)} of aconvolutional code is defined as the number of detours (orcodewords), beginning at time 0 in the all-zero state S0 of theencoder, returning again for the first time to S0 after ` time units,and having code (Hamming) weight w and data (Hamming)weight i .
Definition: The extended weight distribution {A(w , i)} of aconvolutional code is defined by
A(w , i) =∞∑
`=1
A(w , i , `) .
That is, {A(w , i)} is the number of detours (starting at time 0)from the all-zero path with code sequence (Hamming) weight wand corresponding data sequence (Hamming) weight i .
Peter Mathys ECEN 5682 Theory and Practice of Error Control Codes

Convolutional Code Performance Performance Measures
Definition: The weight distribution {Aw} of a convolutional codeis defined by
Aw =∞∑i=1
A(w , i) .
That is, {Aw} is the number of detours (starting at time 0) fromthe all-zero path with code sequence (Hamming) weight w .
Theorem: The probability of an error event (or decoding error) PE
for a convolutional code with weight distribution {Aw}, decodedby a ML decoder, at any given time t (measured in frames) isupper bounded by
PE ≤∞∑
w=dfree
Aw Pw (E) ,
where
Pw (E) = P{ML decoder makes detour with weight w} .
Peter Mathys ECEN 5682 Theory and Practice of Error Control Codes

Convolutional Code Performance Performance Measures
Theorem: On a memoryless BSC with transition probabilityε < 0.5, the probability of error Pd(E) between two detours orcodewords distance d apart is given by
Pd(E) =
8>>>>><>>>>>:
dXe=(d+1)/2
d
e
!εe (1− ε)d−e , d odd ,
1
2
d
d/2
!εd/2 (1− ε)d/2 +
dXe=d/2+1
d
e
!εe (1− ε)d−e , d even .
Proof: Under the Hamming distance measure, an error betweentwo binary codewords distance d apart is made if more than d/2 ofthe bits in which the codewords differ are in error. If d is even andexactly d/2 bits are in error, then an error is made with probability1/2. QED
Peter Mathys ECEN 5682 Theory and Practice of Error Control Codes

Convolutional Code Performance Performance Measures
Note: A somewhat simpler but less tight bound is obtained bydropping the factor of 1/2 in the first term for d even as follows
Pd(E) ≤d∑
e=dd/2e
(d
e
)εe (1− ε)d−e .
A much simpler, but often also much more loose bound is theBhattacharyya bound
Pd(E) ≤ 1
2
[4ε (1− ε)
]d/2.
Peter Mathys ECEN 5682 Theory and Practice of Error Control Codes

Convolutional Code Performance Performance Measures
Probability of Symbol Error. Suppose now that Aw =P∞
i=1 A(w , i) issubstituted in the bound for PE . Then
PE ≤∞X
w=dfree
∞Xi=1
A(w , i) Pw (E) .
Multiplying A(w , i) by i and summing over all i then yields the total number of
data symbol errors that result from all detours of weight w asP∞
i=1 i A(w , i).
Dividing by k, the number of data symbols per frame, thus leads to the
following theorem.
Theorem: The probability of a symbol error Ps(E) at any giventime t (measured in frames) for a convolutional code with rateR = k/n and extended weight distribution {A(w , i)}, whendecoded by a ML decoder, is upper bounded by
Ps(E) ≤ 1
k
∞∑w=dfree
∞∑i=1
i A(w , i) Pw (E) ,
where Pw (E) is the probability of error between the all-zero pathand a detour of weight w .
Peter Mathys ECEN 5682 Theory and Practice of Error Control Codes

Convolutional Code Performance Performance Measures
The graph on the next slide shows different bounds for theprobability of a bit error on a BSC for a binary rate R = 1/2,K = 3 convolutional encoder with transfer function matrix
G(D) =[1 + D2 1 + D + D2
].
Peter Mathys ECEN 5682 Theory and Practice of Error Control Codes

Convolutional Code Performance Performance Measures
−6 −5.5 −5 −4.5 −4 −3.5 −3 −2.5 −2 −1.5 −110
−25
10−20
10−15
10−10
10−5
100
Binary R=1/2, K=3, dfree
=5, Convolutional Code, Bit Error Probability
log10
(ε)
Pb(E
)
Pb(E) BSC
Pb(E) BSC Bhattcharyya
Pb(E) AWGN soft
Peter Mathys ECEN 5682 Theory and Practice of Error Control Codes

Convolutional Code Performance Performance Measures
−4 −3.5 −3 −2.5 −2 −1.5 −110
−10
10−9
10−8
10−7
10−6
10−5
10−4
10−3
10−2
10−1
100
Upper Bounds on Pb(E) for Convolutional Codes on BSC (Hard Decisions)
log10
(ε) for BSC
Pb(E
)R=1/2,K=3,d
free=5
R=2/3,K=3,dfree
=5R=3/4,K=3,d
free=5
R=1/2,K=5,dfree
=7R=1/2,K=7,d
free=10
Peter Mathys ECEN 5682 Theory and Practice of Error Control Codes

Convolutional Code Performance Performance Measures
Peter Mathys ECEN 5682 Theory and Practice of Error Control Codes

Convolutional Code Performance Performance Measures
Transmission Over AWGN Channel
The following figure shows a “one-shot” model for transmitting adata symbol with value a0 over an additive Gaussian noise (AGN)waveform channel using pulse amplitude modulation (PAM) of apulse p(t) and a matched filter (MF) receiver. The main reason forusing a “one-shot” model for performance evaluation with respectto channel noise is that it avoids intersymbol interference (ISI).
+
Noise n(t), Sn(f)
FilterhR(t)
• •↓t = 0
︸ ︷︷ ︸
Channel︸ ︷︷ ︸
Receiver
b(t)s(t) = a0p(t) r(t) b0
Peter Mathys ECEN 5682 Theory and Practice of Error Control Codes

Convolutional Code Performance Performance Measures
If the noise is white with power spectral density (PSD)Sn(f ) = N0/2 for all f , the channel model is called additive whiteGaussian noise (AWGN) model. In this case the matched filter(which maximizes the SNR at its output at t = 0) is
hR(t) =p∗(−t)∫∞
−∞ |p(µ)|2dµ⇐⇒ HR(f ) =
P∗(f )∫∞−∞ |P(ν)|2dν
,
where ∗ denotes complex conjugation. If the PAM pulse p(t) isnormalized so that Ep =
∫∞−∞ |p(µ)|2dµ = 1 then the symbol
energy at the input of the MF is
Es = E[ ∫ ∞
−∞|s(µ)|2 dµ
]= E
[|a0|2
],
where the expectation is necessary since a0 is a random variable.
Peter Mathys ECEN 5682 Theory and Practice of Error Control Codes

Convolutional Code Performance Performance Measures
When the AWGN model with Sn(f ) = N0/2 is used and a0 = α istransmitted, the received symbol b0 at the sampler after theoutput of the MF is a Gaussian random variable with mean α andvariance σ2
b = N0/2. For antipodal binary signaling (e.g., usingBPSK) a0 ∈ {−
√Es ,+
√Es} where Es is the (average) energy per
symbol. Thus, b0 is characterized by the conditional pdf’s
fb0(β|a0=−√
Es) =e−(β+
√Es)2/N0
√πN0
,
and
fb0(β|a0=+√
Es) =e−(β−
√Es)2/N0
√πN0
.
These pdf’s are shown graphically on the following slide.
Peter Mathys ECEN 5682 Theory and Practice of Error Control Codes

Convolutional Code Performance Performance Measures
β
a0 = −√Es ←→ a0 = +√
Es
0−√Es +√
Es
fb0(β|a0=−√
Es) fb0(β|a0=+√
Es)
2√
Es
If the two values of a0 are equally likely or if a ML decoding rule isused, then the (hard) decision threshold per symbol is to decidea0 = +
√Es if β > 0 and a0 = −
√Es otherwise.
Peter Mathys ECEN 5682 Theory and Practice of Error Control Codes

Convolutional Code Performance Performance Measures
The probability of a symbol error when hard decisions are used is
P(E|A0=−√
Es) =1√πN0
∫ ∞
0e−(β+
√Es)2/N0dβ =
1
2erfc
(√Es
N0
),
where erfc(x) = 2√π
∫∞x e−γ2
dγ ≈ e−x2. Because of the symmetry
of antipodal signaling, the same result is obtained forP(E|a0= +
√Es) and thus a BSC derived from an AWGN channel
used with antipodal signaling has transition probability
ε =1
2erfc
(√Es
N0
),
where Es is the energy received per transmitted symbol.
Peter Mathys ECEN 5682 Theory and Practice of Error Control Codes

Convolutional Code Performance Performance Measures
To make a fair comparison in terms of signal-to-noise ratio (SNR)of the transmitted information symbols between coded anduncoded systems, the energy per code symbol of the coded systemneeds to be scaled by the rate R of the code. Thus, when harddecisions and coding are used in a binary system, the transitionprobability of the BSC model becomes
εc =1
2erfc
(√R
Es
N0
),
where R = k/n is the rate of the code.
The figure on the next slide compares Pb(E) versus Eb/N0 for anuncoded and a coded binary system. The coded system uses aR = 1/2 K = 3 convolutional encoder withG(D) =
[1 + D2 1 + D + D2
].
Peter Mathys ECEN 5682 Theory and Practice of Error Control Codes

Convolutional Code Performance Performance Measures
0 2 4 6 8 10 1210
−12
10−10
10−8
10−6
10−4
10−2
100
102
Binary R=1/2, K=3, dfree
=5, Convolutional Code, Hard decisions AWGN channel
Eb/N
0 [dB], E
b: info bit energy
Pb(E
)P
b(E) uncoded
Pb(E) union bound
Pb(E) Bhattacharyya
Peter Mathys ECEN 5682 Theory and Practice of Error Control Codes

Convolutional Code Performance Performance Measures
Definition: Coding Gain. Coding gain is defined as the reductionin Es/N0 permissible for a coded communication system to obtainthe same probability of error (Ps(E) or PB(E) as an uncodedsystem, both using the same average energy per transmittedinformation symbol.
Definition: Coding Threshold. The value of Es/N0 (where Es isthe energy per transmitted information symbol) for which thecoding gain becomes zero is called the coding threshold.
The graphs on the following slide show Pb(E) (computed using theunion bound) versus Eb/N0 for a number of different binaryconvolutional encoders.
Peter Mathys ECEN 5682 Theory and Practice of Error Control Codes

Convolutional Code Performance Performance Measures
0 2 4 6 8 10 1210
−12
10−10
10−8
10−6
10−4
10−2
100
Upper Bounds on Pb(E) for Convolutional Codes on AWGN Channel, Hard Decisions
Eb/N
0 [dB], E
b: info bit energy
Pb(E
)
UncodedR=1/2,K=3,d
free=5
R=2/3,K=3,dfree
=5R=3/4,K=3,d
free=5
R=1/2,K=5,dfree
=7R=1/2,K=7,d
free=10
Peter Mathys ECEN 5682 Theory and Practice of Error Control Codes

Convolutional Code Performance Performance Measures
Soft Decisions and AWGN Channel
Assuming a memoryless channel model used without feedback, theML decoding rule after the MF and the sampler is: Output codesequence estimate c = ci iff i maximizes
fb(β|a=ci ) =N−1∏j=0
fbj(βj |aj=cij) ,
over all code sequences ci = (ci0, ci1, ci2, . . .) for i = 0, 1, 2, . . ..
If the mapping 0 → −1 and 1 → +1 is used so that cij ∈ {−1,+1}then fbj
(βj |aj=cij) can be written as
fbj(βj |aj=cij) =
e−(βj−cij
√Es)2/N0
√πN0
.
Peter Mathys ECEN 5682 Theory and Practice of Error Control Codes

Convolutional Code Performance Performance Measures
Taking (natural) logarithms and defining vj = βj/√
Es yields
ln fb(β|a=ci ) = lnN−1∏j=0
fbj(βj |aj=cij) =
N−1∑j=0
ln fbj(βj |aj=cij)
= −N−1∑j=0
(βj − cij
√Es)
2
N0− N
2ln(πN0)
= − Es
N0
N−1∑j=0
(v2j − 2 vj cij + c2
ij )−N
2ln(πN0)
=2Es
N0
N−1∑j=0
vj cij −( |β|2 + NEs
N0+
N
2ln(πN0)
)= K1
N−1∑j=0
vj cij − K2 ,
where K1 and K2 are constants independent of the codeword ci
and thus irrelevant for ML decoding.
Peter Mathys ECEN 5682 Theory and Practice of Error Control Codes

Convolutional Code Performance Performance Measures
Example: Suppose the convolutional encoder withG(D) =
[1 1 + D
]is used and the received data is
v = -0.4, -1.7, 0.1, 0.3, -1.1, 1.2, 1.2, 0.0, 0.3, 0.2, -0.2, 0.7, . . .
Peter Mathys ECEN 5682 Theory and Practice of Error Control Codes

Convolutional Code Performance Performance Measures
Soft Decisions versus Hard Decisions
To compare the performance of coded binary systems on a AWGNchannel when the decoder performs either hard or soft decisions,the energy Ec per coded bit is fixed and Pb(E) is plotted versus εof the hard decision BSC model where ε = 1
2erfc(√
Ec/N0
)as
before. For soft decisions the expression
Pw (E) =1
2erfc
(√w Ec
N0
)is used for the probability that the ML decoder makes a detourwith weight w from the correct path. Thus, for soft decisions withfixed SNR per code symbol
Pb(E) ≤ 1
2k
∞∑w=dfree
Dw erfc(√
w Ec
N0
).
Examples are shown on the next slide.
Peter Mathys ECEN 5682 Theory and Practice of Error Control Codes

Convolutional Code Performance Performance Measures
−4 −3.5 −3 −2.5 −2 −1.5 −110
−15
10−10
10−5
100
Upper Bounds on Pb(E) for Convolutional Codes with Soft Decisons (Dashed: Hard Decisions)
log10
(ε) for BSC
Pb(E
)R=1/2,K=3,d
free=5
R=2/3,K=3,dfree
=5R=3/4,K=3,d
free=5
R=1/2,K=5,dfree
=7R=1/2,K=7,d
free=10
Peter Mathys ECEN 5682 Theory and Practice of Error Control Codes

Convolutional Code Performance Performance Measures
Coding Gain for Soft Decisions
To compare the performance of uncoded and coded binary systemswith soft decisions on a AWGN channel, the energy Eb perinformation bit is fixed and Pb(E) is plotted versus thesignal-to-noise ratio (SNR) Eb/N0. For an uncoded system
Pb(E) =1
2erfc
(√Eb
N0
), (uncoded) .
For a coded system with soft decision ML decoding on a AWGNchannel
Pb(E) ≤ 1
2k
∞∑w=dfree
Dw erfc(√
wR Eb
N0
),
where R = k/n is the rate of the code.
Examples are shown in the graph on the next slide.
Peter Mathys ECEN 5682 Theory and Practice of Error Control Codes

Convolutional Code Performance Performance Measures
0 2 4 6 8 10 1210
−12
10−10
10−8
10−6
10−4
10−2
100
Upper Bounds on Pb(E) for Convolutional Codes on AWGN Channel, Soft Decisions
Eb/N
0 [dB], E
b: info bit energy
Pb(E
)
UncodedR=1/2,K=3,d
free=5
R=2/3,K=3,dfree
=5R=3/4,K=3,d
free=5
R=1/2,K=5,dfree
=7R=1/2,K=7,d
free=10
Peter Mathys ECEN 5682 Theory and Practice of Error Control Codes












![Chap 01[1]](https://static.fdocuments.in/doc/165x107/55addd631a28abd5758b45bc/chap-011-55b0b7fd21a48.jpg)