Lyapunov rule based model reference adaptive controller designs for steam turbine speed
10
http://www.iaeme.com/ijeet.asp 13 [email protected] International Journal of Electrical Engineering & Technology (IJEET) Volume 6, Issue 7, July-Aug (2015), pp. 13-22, Article ID: Article ID: 40220150607002 Available online at http://www.iaeme.com/currentissue.asp?JType=IJEET&VType=6&IType=7 ISSN Print: 0976 – 6545 and ISSN Online: 0976 – 6553 © IAEME Publication _____________________________________________________________________ LYAPUNOV RULE BASED MODEL REFERENCE ADAPTIVE CONTROLLER DESIGNS FOR STEAM TURBINE SPEED Prof. NASAR A Industrial Instrumentation and control, Electrical & Electronics Engineering TKM College of Engineering, Karicode, Kollam Dr. N E JAFFAR Chemical Engineering, TKM College of Engineering Karicode, Kollam SHERIN A KOCHUMMEN Industrial Instrumentation and control, Electrical & Electronics Engineering TKM College of Engineering, Karicode, Kollam ABSTRACT A steam turbine, heart of all refineries. This work presents the mathematical modelling of the steam turbine unit in isolated operating condition, based on the continuity equation including servomotor for actuation purpose. Steam turbine should run at a constant speed for its safe operation and frequency stability. Adaptation of different controller like Feedback, PI, PID using certain adaptation techniques improves the performance of the system. This paper investigates Model Reference Adaptive Controller for speed control of Tandem compound reheat steam turbine using Lyapunov Rule to improve set point tracking and control over the turbine speed. Keywords: Mathematical modeling, Model Reference Adaptive Control (MRAC), Lyapunov rule, Steam turbine, Speed control. Cite this Article: Prof. Nasar A, Dr. N E Jaffar and Sherin A Kochummen Lyapunov Rule Based Model Reference Adaptive Controller Designs For Steam Turbine Speed. International Journal of Electrical Engineering & Technology, 6(7), 2015, pp. 13-22 http://www.iaeme.com/currentissue.asp?JType=IJEET&VType=6&IType=7 _______________________________________________________________ 1. INTRODUCTION The steam turbine extracts energy from pressurized steam into rotary energy, for various applications such as generators, compressors, paper mills and process pumps.
-
Upload
iaeme-publication -
Category
Engineering
-
view
83 -
download
1
Transcript of Lyapunov rule based model reference adaptive controller designs for steam turbine speed

http://www.iaeme.com/ijeet.asp 13 [email protected]
International Journal of Electrical Engineering & Technology (IJEET) Volume 6, Issue 7, July-Aug (2015), pp. 13-22, Article ID: Article ID: 40220150607002
Available online at http://www.iaeme.com/currentissue.asp?JType=IJEET&VType=6&IType=7 ISSN Print: 0976 – 6545 and ISSN Online: 0976 – 6553 © IAEME Publication _____________________________________________________________________
LYAPUNOV RULE BASED MODEL
REFERENCE ADAPTIVE CONTROLLER
DESIGNS FOR STEAM TURBINE SPEED
Prof. NASAR A
Industrial Instrumentation and control, Electrical & Electronics Engineering TKM College of Engineering, Karicode, Kollam
Dr. N E JAFFAR
Chemical Engineering, TKM College of Engineering Karicode, Kollam
SHERIN A KOCHUMMEN
Industrial Instrumentation and control, Electrical & Electronics Engineering TKM College of Engineering, Karicode, Kollam
ABSTRACT
A steam turbine, heart of all refineries. This work presents the
mathematical modelling of the steam turbine unit in isolated operating
condition, based on the continuity equation including servomotor for actuation
purpose. Steam turbine should run at a constant speed for its safe operation
and frequency stability. Adaptation of different controller like Feedback, PI,
PID using certain adaptation techniques improves the performance of the
system. This paper investigates Model Reference Adaptive Controller for
speed control of Tandem compound reheat steam turbine using Lyapunov Rule
to improve set point tracking and control over the turbine speed.
Keywords: Mathematical modeling, Model Reference Adaptive Control (MRAC), Lyapunov rule, Steam turbine, Speed control.
Cite this Article: Prof. Nasar A, Dr. N E Jaffar and Sherin A Kochummen Lyapunov Rule Based Model Reference Adaptive Controller Designs For Steam Turbine Speed. International Journal of Electrical Engineering &
Technology, 6(7), 2015, pp. 13-22 http://www.iaeme.com/currentissue.asp?JType=IJEET&VType=6&IType=7 _______________________________________________________________
1. INTRODUCTION
The steam turbine extracts energy from pressurized steam into rotary energy, for various applications such as generators, compressors, paper mills and process pumps.

Prof. Nasar A, Dr. N E Jaffar and Sherin A Kochummen
http://www.iaeme.com/ijeet.asp 14 [email protected]
To increase the thermal efficiency in applications, steam turbines consist of multistage steam expansion made practical by use of tandem-compound turbines. In a tandem compound turbine, the sections are all on one shaft, with a single generator whereas for cross compound turbines there are multiple shafts where generators are connected to each. A stationary set of blades (called nozzles) and a moving set of adjacent blades (called buckets or rotor blades) installed within a casing work together to turn the shaft of the turbine and the connected load and so speed control is made by controlling the inlet steam pressure.
Various control techniques were proposed in steam turbine speed control system. In [3] the behavior of the shaft torque is simulated with isolated load and proportional control algorithm but with a simplified first order system. Adaptation of PID Controller using AI Technique like fuzzy logic, Particle Swarm Optimization (PSO), Genetic Algorithm (GA), Bacterial Particle Swarm Optimization (BPSO) and Neuro fuzzy controller(ANFIS) for Speed Control of Isolated Steam Turbine was the work done by Mohamed .M. Ismail [4]. The turbine is considered just as a first order system along with an electro-hydraulic governor. In the work by Dr. M Sai Veerraju and S K Mabhujani [5] general model for power plant with fuzzy PID, ANFIS and neural network control system is built for power system dynamic analysis. The responses are compared for system frequency stability.
Sanjay Kr. Singh, 2013 in their study [6] focuses on multi-objective optimization of the PID controllers for optimal speed control for an isolated steam turbine. In complex operations, optimal tuning plays an imperative role in maintaining the product quality and process safety. This study focuses on the comparison of the optimal PID tuning using Multi-objective Genetic Algorithm against normal genetic algorithm and Ziegler Nichols methods for the speed control of an isolated steam turbine. Isolated steam turbine not being connected to the grid; hence is usually used in refineries as steam turbine, where a hydraulic governor is used for the speed control.
Ali Chaibakhsh et. al. [7] in their paper characterized the transient dynamics of steam turbines subsections. In 2013 Lukáš Hubka and Petr Školník presented a paper [8] which describes a possible way to build a simulation model of the most important part of a power plant – the turbine with reheating section.
In this paper, Model Reference Adaptive Controller is designed for speed control of tandem compound reheat steam turbine based on Lyapunov rule.
The structure of this paper is as follows. Section II describes about speed control in steam turbine. The linear mathematical modelling of steam turbine is explained in section III. Section IV discuses about Model Reference Adaptive Control (MRAC) and the designing of Feedback, PI, and PID controllers for steam turbine speed control system using MRAC based on Lyapunov rule. Simulation results is given in section V. Conclusion and future scope is discussed in section VI and VII respectively.
2. SPEED CONTROL IN STEAM TURBINE
The speed control of turbine is to protect the turbine from over speeding, since applications like generators require precise speed control. The safety control element on a turbine is the steam supply valve present in the steam chest after boiler and reheater section. This safety valve can be a separate on/off valve or the shut-off function can be incorporated into the controls of the steam supply valve that is used for speed control.

Lyapunov Rule Based Model Reference Adaptive Controller Designs For Steam Turbine
http://www.iaeme.com/ijeet
Figure 1 Tandem compound steam turbine configuration
Steam enters the high pressure (HP) section through the control valve and inlet piping. The HP exhaust steam is passed through the reheater. The into the IP turbine section through the reheat intercept valve (RHV). The crossover piping (CP) provides a path for the steam from IP section exhaust to the LP inlet as shown in fig 1.
The generator connected to the shaft of steam turbinspeed for its safe operation, for that we have to control the steam flow to the turbine. So we use the control valves to modulate the steam flow by adjusting its position.
3. LINEAR MODELLING OF
The mathematical modelling of the steam turbine unit, developed basecontinuity equation [1, 3]:
Steam mass flow rate,
���� � �. ��
�� ���� � �� � � ���� �
In the above equations, of turbine [m3], ρ is the[kg/s], t is time [sec.].
Assuming the flow out of the turbine to be proportional to pressure in the turbine
��� � �. ����
Lyapunov Rule Based Model Reference Adaptive Controller Designs For Steam Turbine Speed
ijeet.asp 15 [email protected]
Tandem compound steam turbine configuration
Steam enters the high pressure (HP) section through the control valve and inlet piping. The HP exhaust steam is passed through the reheater. The reheat steam flows into the IP turbine section through the reheat intercept valve (RHV). The crossover piping (CP) provides a path for the steam from IP section exhaust to the LP inlet as
The generator connected to the shaft of steam turbine should run at a constant speed for its safe operation, for that we have to control the steam flow to the turbine. So we use the control valves to modulate the steam flow by adjusting its position.
LINEAR MODELLING OF STEAM TURBINE
elling of the steam turbine unit, developed base]:
(1)
(2)
Figure 2 A basic steam turbine unit
In the above equations, W is the weight of steam in turbine [kg], Vthe density of steam [kg/m3], F is the steam mass flow rate
Assuming the flow out of the turbine to be proportional to pressure in the turbine
(3)
Lyapunov Rule Based Model Reference Adaptive Controller Designs For Steam Turbine
Steam enters the high pressure (HP) section through the control valve and inlet reheat steam flows
into the IP turbine section through the reheat intercept valve (RHV). The crossover piping (CP) provides a path for the steam from IP section exhaust to the LP inlet as
e should run at a constant speed for its safe operation, for that we have to control the steam flow to the turbine. So we use the control valves to modulate the steam flow by adjusting its position.
elling of the steam turbine unit, developed based on the
V is the volume steam mass flow rate
Assuming the flow out of the turbine to be proportional to pressure in the turbine

Prof. Nasar A, Dr. N E Jaffar and Sherin A Kochummen
http://www.iaeme.com/ijeet.asp 16 [email protected]
Where: P is pressure of steam in the turbine [kPa], �� – rated pressure; � – rated flow out of turbine.
With constant temperature in the turbine:
���� � ��
�� . ���� (4)
���� � ��
��. ����
�� (5)
�� � � ���� �=�. ����
. ���� . ����
�� (6)
�� � � ���� �+!�. ���� �� (7)
General model for a single steam turbine unit is
"#�$�=%
&# '% (8)
As the steam turbine configuration varies the complete turbine model can obtained accordingly. The complete model transfer function can be obtained using the parameters from the following table.
The overall transfer function of tandem compound reheat steam turbine is
G)�s� � %.%*+,-'*.++,'%�../0+,1'+.0+,-'2.*+,'% (9)
Table I Steam turbine parameters
Parameter HP section IP section LP section
Power fraction 34� � 0.3 37� � 0.3
38�=0.4
Time constant (sec) !4�= 0.25
!94=7.5 !8�= 0.5
Servomotor used in automatic control systems converts the electrical signal into angular displacement thus used for actuating purpose by governing the valve opening. The suitability of the motor for a particular application depends on the characteristics, purpose and operating conditions of the system. The complete model considered is an isolated turbine speed control system in which the turbine is not connected to the grid.
:;<�$�=%
�./&'% (10)
:8�$�=%
%*& (11)
Thus the complete proposed system is
G�s� � %.%*+,-'*.++,'%/./0+,='/%..+,>'.2.0,1'%�*.?,-'%*, (12)
4. MODEL REFERENCE ADAPTIVE CONTROL
The Model Reference Adaptive Systems (MRAS) derived for deterministic continuous-time signals is an important adaptive control where desired performance expressed in terms of reference model thus responding to the command signal, other than the normal feedback loop there is another to change the controller parameters
Lyapunov Rule Based Model Reference Adaptive Controller Designs For Steam Turbine Speed
http://www.iaeme.com/ijeet.asp 17 [email protected]
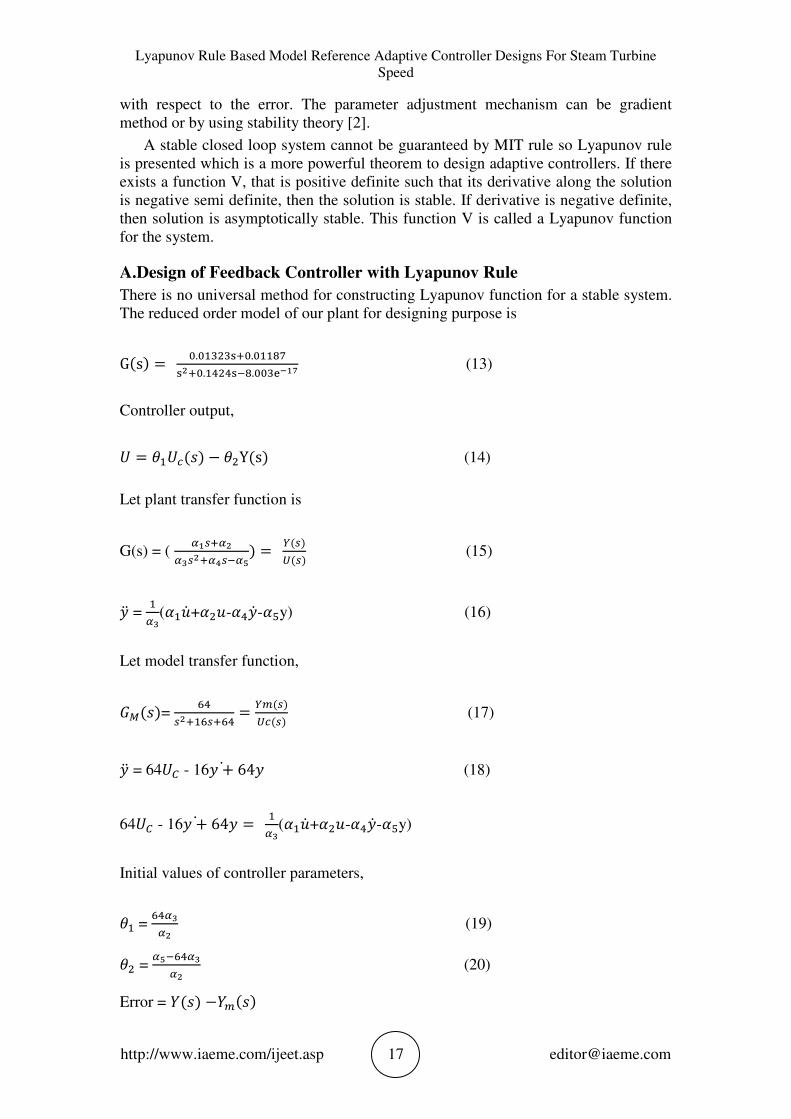
with respect to the error. The parameter adjustment mechanism can be gradient method or by using stability theory [2].
A stable closed loop system cannot be guaranteed by MIT rule so Lyapunov rule is presented which is a more powerful theorem to design adaptive controllers. If there exists a function V, that is positive definite such that its derivative along the solution is negative semi definite, then the solution is stable. If derivative is negative definite, then solution is asymptotically stable. This function V is called a Lyapunov function for the system.
A.Design of Feedback Controller with Lyapunov Rule
There is no universal method for constructing Lyapunov function for a stable system. The reduced order model of our plant for designing purpose is
G�s� � �.�%/*/,'�.�%%20,-'�.%@*@,A2.��/BCDE (13)
Controller output,
F � G%FH�$� � G*Y�s� (14)
Let plant transfer function is
G(s) = ( JD&'J-
J1&-'J>&AJ=� � K�&�
L�&� (15)
MN = %
J1(O%PQ +O*P-O@MQ -O+y) (16)
Let model transfer function,
:<�$�= ?@
&-'%?&'?@ � KR�&�LH�&� (17)
MN = 64FS - 16M +Q 64M (18)
64FS - 16M +Q 64M � %J1
(O%PQ +O*P-O@MQ -O+y)
Initial values of controller parameters,
G% = ?@J1
J- (19)
G* = J=A?@J1
J- (20)
Error = W�$� �WR�$�

Prof. Nasar A, Dr. N E Jaffar and Sherin A Kochummen
http://www.iaeme.com/ijeet.asp 18 [email protected]
Defining the Lyapunov function,
V (e,G%,G*) = %* XY* + %
J-Z [O*G* + 64 O/ � O+\* + %J-Z [O*G% � 64 O/\*] (21)
Derivative of Lyapunov function,
�^�� = �O*e* +
%Z [O*G* + 64 O/ � O+\. (
�_-�� � `MY)+ + %
Z [O*G% � 64 O/\. (�_D�� + `PHY) (22)
Therefore,
�_-�� � `MY (23)
�_D�� � `PHY (24)
B.Design of PI Controller with Lyapunov Rule
A quadratic Lyapunov function is developed for a linear stable system. The parameter values for PI controller are adapted using this Lyapunov rule.
Controller output,
U = �G%FH�$� � G*Y�s� � G/sY�s�) (25)
Let plant transfer function is
G(s) = ( JD&'J-
J1&-'J>&AJ=� � K�&�
L�&� (26)
MN = %
J1(O%PQ +O*P-O@MQ -O+y) (27)
Let model transfer function
:<�$�= ?@
&-'%?&'?@ � KR�&�LH�&� (28)
MN = 64FS - 16M +Q 64M (29)
Initial values of controller parameters,
G% = ?@J1
J-
G* = J=A?@J1
J-
G/ � %?J1AJ>J-
(30)
Error = W�$� �WR�$�

Lyapunov Rule Based Model Reference Adaptive Controller Designs For Steam Turbine Speed
http://www.iaeme.com/ijeet.asp 19 [email protected]
Defining the Lyapunov function, V (e, G%, G*, G/)
Therefore,
�_-�� � `MY (31)
�_D�� � -`PHY (32)
�_1�� = `MQ Y (33)
C.Design of PID Controller with Lyapunov Rule
The adjustment rule obtained by Lyapunov rule is simpler. The proportional, integral and derivative parameters in control law are adapted using the adjustment mechanism.
Controller output,
F � 3��1 + %#b& + !�$��FH�$� � Y�s�) (34)
Let plant transfer function is
G(s) = ( JD&'J-
J1&-'J>&AJ=� � K�&�
L�&� (35)
MN = %
J1(O%PQ +O*P-O@MQ -O+y) (36)
Let model transfer function,
:<�$�= ?@
&-'%?&'?@ � KR�&�LH�&� (37)
MN = 64FS – 16M +Q 64M (38)
Error = W�$� �WR�$�
From the Lyapunov function, V (e, G%, G*, G/, G@,G+)
Therefore,
�_D�� � -`PHY (39)
�_-�� � -` �c
& Y (40)
�_1�� � `MY (41)
�_>�� = `MQ Y (42)
�_=�� � -` d
& Y (43)
Prof. Nasar A, Dr. N E Jaffar and Sherin A Kochummen
http://www.iaeme.com/ijeet.asp 20 [email protected]
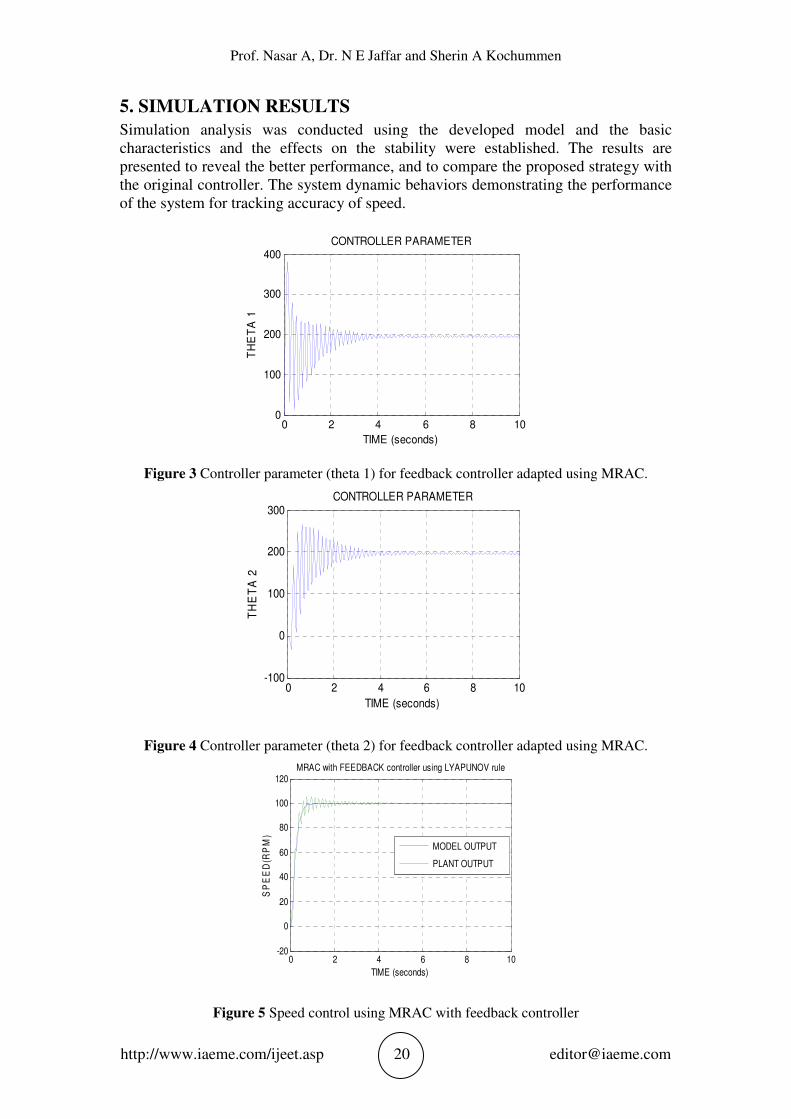
5. SIMULATION RESULTS
Simulation analysis was conducted using the developed model and the basic characteristics and the effects on the stability were established. The results are presented to reveal the better performance, and to compare the proposed strategy with the original controller. The system dynamic behaviors demonstrating the performance of the system for tracking accuracy of speed.
Figure 3 Controller parameter (theta 1) for feedback controller adapted using MRAC.
Figure 4 Controller parameter (theta 2) for feedback controller adapted using MRAC.
Figure 5 Speed control using MRAC with feedback controller
0 2 4 6 8 100
100
200
300
400
TIME (seconds)
TH
ET
A 1
CONTROLLER PARAMETER
0 2 4 6 8 10-100
0
100
200
300
TIME (seconds)
TH
ET
A 2
CONTROLLER PARAMETER
0 2 4 6 8 10-20
0
20
40
60
80
100
120
TIME (seconds)
SP
EE
D(R
PM
)
MRAC with FEEDBACK controller using LYAPUNOV rule
MODEL OUTPUT
PLANT OUTPUT

Lyapunov Rule Based Model Reference Adaptive Controller Designs For Steam Turbine Speed
http://www.iaeme.com/ijeet.asp 21 [email protected]
Figure 6 Speed control using MRAC with PI controller
Figure 7 Speed control using MRAC with PID controller
Table II Performance comparison using different controllers
Adaptation
mechanism
Controller Peak Overshoot(rpm) Settling
time(sec)
Lyapunov rule Feedback 106 5
Lyapunov rule PI 104 4
Lyapunov rule PID 101 3
6. CONCLUSIONS
This paper described the MRAC controller for steam generating unit to avoid the frequency fluctuation and response speed specifications. Feedback, PI and PID controller was designed and evaluated through computer simulation. The tracking capability and steady state response is examined. The adaptation gains are responsible to improve the transient performance of the speed response in terms of rise time, overshoot, settling time for step speed response.
0 5 10 15 20-50
0
50
100
150
TIME (seconds)
SP
EE
D(R
PM
)
MRAC with PI controller using LYAPUNOV rule
MODEL OUTPUT
PLANT OUTPUT
0 2 4 6 8 10-20
0
20
40
60
80
100
120
TIME (seconds)
SP
EE
D
MRAC with PID CONTROLLER using LYAPUNOV RULE
MODEL OUTPUT
PLANT OUTPUT

Prof. Nasar A, Dr. N E Jaffar and Sherin A Kochummen
http://www.iaeme.com/ijeet.asp 22 [email protected]
7. FUTURE SCOPE
This paper investigated the linear modelling of tandem compound steam turbine, future work can be done including the non-linearities in the system which arise some errors and it can be eliminated by use of the same Lyapunov rule.
REFERENCES
[1] Kundur P. Power system stability and control. McGraw-Hill Professional; 1994.
[2] Astrom, K.J., and B. Wittenmark; Adaptive control; 2nd Edition: Prentice-Hall, 1994.
[3] Mircea Dulau, Dorin Bica, Mathematical modelling and simulation of the behaviour of the steam turbine, International Conference
Interdisciplinarity in Engineering, 2014, pp. 723–729
[4] Mohamed. M. Ismail, Adaptation of PID controller using AI techniques for speed control of isolated steam turbine, IEEE Journal of Control,
Automation and Systems, Vol. 1(1). 2012
[5] Dr. M Sai Veerraju, S K Mabhujani, Simulation of Load Frequency Control of Power Systems using FLC, NN and ANFIS controllers, International Journal of Emerging Trends in Engineering and
Development. J., Vol. 5, July 2012, pp. 383–391.
[6] Sanjay Kr. Singh, D. Boolchandani, S.G. Modani, Nitish Katal, Multi-objective PID Optimization for Speed Control of an Isolated Steam Turbine using Gentic Algorithm, Research Journal of Applied Sciences,
Engineering and Technology, Vol. 7, May. 2006, pp. 3441-3445.
[7] Ali Chaibakhsh, Ali Ghaffari, Steam turbine model, Simulation Modelling
Practice and Theory. J., Vol. 16, pp. 1145–1162, 2008.
[8] Lukáš Hubka, Petr Školník, Steam turbine and steam reheating simulation model, IEEE International Conference on Process Control (PC), June 2013, pp. 31–36
[9] Jianwei Tu, Xiaofeng Lin, Bo Tu, Jiayun Xu, Dongmei Tan, Simulation and experimental tests on active mass damper control system based on Model Reference Adaptive Control algorithm, Journal of Sound and
Vibration, pp. 4826-4842,. 2014.
[10] Coman Adrian, Axente Corneliu, Boscoianu Mircea, The simulation of the adaptive systems using the MIT rule, 10th WSEAS Int. Conf. on Mathematical Methods and Computational Techniques in Electrical
Engineering (MMACTEE'08), May 2008, pp. 301-305,
[11] Swarnkar Pankaj, Jain Shailendra Kumar, Nema R.K Comparative Analysis of MIT Rule and Lyapunov Rule in Model Reference Adaptive Control Scheme, Innovative Systems Design and Engineering, Vol. 2, pp. 154–162, 2011.
[12] Suttipan Limanond, Kostas S. Tsakalis, Model Reference Adaptive and Nonadaptive Control of Linear Time-Varying Plants, IEEE Transactions
on Automatic Control, Vol. 45(7), July 2000, pp. 1290-1300.