Locking free elements for polyconvex anisotropic … · Locking free elements for polyconvex...
4
Locking free elements for polyconvex anisotropic material formulations Julian Dietzsch 1 and Michael Groß 2 1 Technische Universit¨ at Chemnitz, Professorship of applied mechanics and dynamics Reichenhainer Straße 70, D-09126 Chemnitz, [email protected] 2 [email protected] Short abstract Our research activity takes place within the DFG project GR 3297/4-1. The target is the development of a new locking free energy consistent time integrator for a polyconvex anisotropic material formulation. In the first step, we compare a non-standard mixed finite element [1] with standard methods for tetrahedral and hexahedral elements for bodies with multiple material domains and anisotropy directions within a static analysis. In the next steps, we aim at the extension of this formulation to a dynamic system [3] and to thermo-viscoelastic material behaviour. Keywords Anisotropy, quasi-incompressibility, locking free finite elements. 1 Introduction The considered finite element discretization is based on the Hu-Washizu functional presented in [1]. This five-field functional with respect to the reference configuration B 0 reads Π(x, H, B, Θ,p)= Z B 0 Ψ(C(x), H, Θ)dV + Z B 0 p(J (x) - Θ)dV Z B 0 B:(cof[C(x)] - H)dV , with the five independent variables x, H, B, Θ and p. The third invariant of deformation gradient F and the right Cauchy-Green tensor are denoted by J and C, respectively. The variables H and Θ approximates the cofactor of C and J , respectively. The variables B and p represent the corresponding Lagrange multiplier. The variation of the functional and the finite element
Transcript of Locking free elements for polyconvex anisotropic … · Locking free elements for polyconvex...

Locking free elements for polyconvex
anisotropic material formulationsJulian Dietzsch1 and Michael Groß2
1Technische Universitat Chemnitz, Professorship of applied mechanics and dynamics
Reichenhainer Straße 70, D-09126 Chemnitz, [email protected]@mb.tu-chemnitz.de
Short abstract
Our research activity takes place within the DFG project GR 3297/4-1.
The target is the development of a new locking free energy consistent time
integrator for a polyconvex anisotropic material formulation. In the first step,
we compare a non-standard mixed finite element [1] with standard methods
for tetrahedral and hexahedral elements for bodies with multiple material
domains and anisotropy directions within a static analysis. In the next steps,
we aim at the extension of this formulation to a dynamic system [3] and to
thermo-viscoelastic material behaviour.
Keywords Anisotropy, quasi-incompressibility, locking free finite elements.
1 Introduction
The considered finite element discretization is based on the Hu-Washizu
functional presented in [1]. This five-field functional with respect to the
reference configuration B0 reads
Π(x,H,B,Θ, p) =
∫B0
Ψ(C(x),H,Θ)dV +
∫B0p(J(x)−Θ)dV∫
B0B:(cof[C(x)]−H)dV ,
with the five independent variables x, H, B, Θ and p. The third invariant
of deformation gradient F and the right Cauchy-Green tensor are denoted
by J and C, respectively. The variables H and Θ approximates the cofactor
of C and J , respectively. The variables B and p represent the corresponding
Lagrange multiplier. The variation of the functional and the finite element

RCM 2017 - Research Challenges in Mechanics Julian Dietzsch
approximation of these fields lead to five nonlinear equations, which are
solved by the Newton-Raphson method. The resulting tangents condensate at
element level to a pure displacement formulation. We consider a hyperelastic,
isotropic, polyconvex strain energy Ψ = Ψiso as well as a transversely
isotropic, polyconvex strain energy Ψ = Ψiso + Ψti, given by
Ψiso(C,H,Θ) =ε12
(tr[C])2 +ε22
(tr[H])2 − ε3ln(Θ) + ε4(Θ2ε5 + Θ−2ε5 − 2)
Ψti(C,H,Θ) = ε6
(1
ε7 + 1(tr[CM ])ε7+1 +
1
ε8 + 1(tr[HM ])ε8+1 +
1
ε9Θ−2ε9
)which are presented in [1]. Here, M = a⊗ a denotes the structural tensor
and a the fiber direction in the reference configuration.
2 Numerical examples
As numerical example serves the well-known cook’s cantilever beam with a
quadratic distribution of an in-plane load on the Neumann boundary with
the prescribed pressure amplitude p and prescribed material parameters (see
Figure 3). We compare the non-standard mixed elements (TCo/HCo) with
the standard displacement elements (T/H), the selective reduced integrated
elements (SRI, hexahedral elements only) and the mixed element presented
in [2] (TP/HP) for linear tetrahedral and hexahedral elements as well as
the corresponding quadratic serendipity elements. Herein, we analyze the
spatial convergence with respect to the polynomial degree of the underlying
Lagrange polynomials and with respect to the level of mesh refinement. For
the TCoXYZ/HCoXYZ elements, X is the polynomial degree of x, Y is the
polynomial degree of H/B and Z is the polynomial degree of Θ/p. GPX spec-
ify the number X of Gaussian quadrature points. The elements SRI1/H1P0,
SRI2/H2P1, T1P0/T1 and T2P1/T2 provide equal or nearly equal solutions
for the presented cases. Expected equivalences with the TCo/HCo element
can be also found with e.g. the HCo222/H2, HCo220/H2P0, HCo110/H1P0
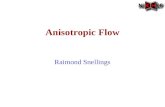
or TCo222/T2 element. Figure 1 shows the convergence of the y-coordinate
of some elements for an uniform fiber direction (see caption). Here, the
HCo210 element have the highest convergence rate, followed by the H2P0
element. For tetrahedral elements, the TCo210 element provides the fastest
convergence. Using a linear approximation, the HCo100 element have a fast
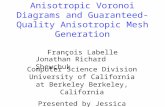
convergence. Figure 2 shows the convergence of the x-coordinate for two
different fiber directions (see caption). Here, the convergence rates of the
different elements behave in the same manner. The last example, shown in
Figure 4, have also different anisotropic directions (see caption). In this case,
the HCo210 and H2P0 elements converges from above. Nevertheless, both
show the highest convergence rate.
March 1-3, 2017 - Hannover

RCM 2017 - Research Challenges in Mechanics Julian Dietzsch
σVM
10 3 10 4 10 573
73.2
73.4
73.6
73.8
74
74.2
74.4
74.6
74.8
75
H1(GP8)
H2(GP27)
HCo210(GP27)
HCo100(GP8)
H1P0(GP8)
H2P1(GP27)
H2P0(GP27)
T1(GP5)
T2(GP11)
TCo210(GP11)
T2P0(GP11)
nDOFy-c
oord
inat
e
Figure 1: Deformed configuration Bt of the HCo210 method (nel = 6144)
and convergence of the y-coordinate for p = 1000 and a1 = a2 = [1 1 1].
σVM
10 3 10 4 10 5
30.5
31
31.5
32
32.5
33
33.5
34
H1(GP8)
H2(GP27)
HCo210(GP27)
HCo100(GP8)
H1P0(GP8)
H2P1(GP27)
H2P0(GP27)
T1(GP5)
T2(GP11)
TCo210(GP11)
T2P0(GP11)
nDOF
x-c
oord
inat
e
Figure 2: Deformed configuration Bt of the TCo210 method (nel = 7883) and
convergence of the y-coordinate for p = 1000 and a1 = [1 1 1],a2 = [1 1 − 1].
3 Outlook
For the anisotropic case, the CoFEM elements provide higher convergence
rates than the standard elements, but not in the same extent as in the isotropic
case. Nevertheless, in the next step, we aim at an extension of this formulation
to a dynamic system. We extend this to a continuous Galerkin formulation,
and then to an energy conserving formulation. Here, we investigate the
influence of the spatial approximation to the time discretization, because
independent spatial variables are also discretized independently in time.
March 1-3, 2017 - Hannover

RCM 2017 - Research Challenges in Mechanics Julian Dietzsch
y
x
z
44
10 48
44
16
A
p Materialparameters
ε1 ε2 ε342 84 1260
ε4 ε5 ε6100 10 3000
ε7 ε8 ε94 8 1
Figure 3: Geometry of the material domains (domain 1/domain 2) of the
cook cantilever beam (left) and the prescribed material parameters (right).
σVM
10 3 10 4 10 569
69.2
69.4
69.6
69.8
70
70.2
70.4
70.6
70.8
71
H1(GP8)
H2(GP27)
HCo210(GP27)
HCo100(GP8)
H1P0(GP8)
H2P1(GP27)
H2P0(GP27)
T1(GP5)
T2(GP11)
TCo210(GP11)
T2P0(GP11)
nDOF
y-c
oord
inat
e
Figure 4: Deformed configuration Bt of the HCo210 method (nel = 6144) and
convergence of the y-coordinate for p = 1000 and a1 = [1 0 0],a2 = [0 1 0].
References
[1] Schroder, J., Wriggers, P., Balzani, D., 2011. A new mixed finite element
based on different approximations of the minors of deformation tensors.
Computer Methods in Applied Mechanics and Engineering 49:3583–3600.
[2] Simo, J., Taylor, R., Pister., K., 1985. Variational and projection methods
for the volume constraint in finite deformation elasto-plasticity. Computer
Methods in Applied Mechanics and Engineering 1:177-208.
[3] Erler N. and Groß M., 2015. Energy-momentum conserving higher-order
time integration of nonlinear dynamics of finite elastic fiber-reinforced
continua. Computational Mechanics 55:921–942.
March 1-3, 2017 - Hannover