


Lecture 02 yasutaka furukawa - 3 d reconstruction with priors
192
ICVSS 2014 3D Reconstruction with Priors Yasutaka Furukawa Washington University in St. Louis
Transcript of Lecture 02 yasutaka furukawa - 3 d reconstruction with priors

ICVSS 20143D Reconstruction with Priors
Yasutaka Furukawa Washington University in St. Louis

What are priors?

Outline
• Why priors?
• Prior enforcement through MRF
• Prior enforcement through primitives
• Prior enforcement through shortest-path

Brief Introduction of Multi-View Stereo (MVS)
Camera pose 3d reconstruction
Input: Calibrated photographs
Output: 3D geometry

MVS PrincipleFeature matching

1995 1999 1998 1998
2004 2005 2005 2007Computer Vision: Algorithms and Applications [Richard Szeliski]

A decade ago... A Theory of Space by Space Carving
[ Kutulakos and Seitz, 1999 ]
Reconstructions w/ and w/o color

Volumetric graph cutsby Vogiatzis, Torr, and Cipolla
CVPR 2005
1. This is called Haniwa. 2. This is Roberto Cipolla’s Haniwa.
This will be a final quiz!

Results
[ CVPR 2007 ]

Visual Effects

Digital mapping
Apple Maps

Computer Vision in Industry
• Amazon
• Apple
• Microsoft
• Nokia

Computer Vision in Industry
• Amazon
• Apple
• Microsoft
• Nokia
Mountain View Seattle Zurich NYC LA …

Computer Vision in Industry
• Amazon
• Apple
• Microsoft
• Nokia
Mountain View Seattle Zurich NYC LA …

Google Seattle - 3D Vision Team
• Bundling streetview data (by Sameer Agarwal)
• Photo Tours (by the team)
• Picasa face movie (by Ira Kemelmacher-Shlizerman and Rahul Garg)
• Lens Blur (by Carlos Hernandez)
Steve Seitz, Sameer Agarwal, Carlos Hernandez, David Gallup, Changchang Wu, Li Zhang

Face Movie[Ira Kemelmacher-Shlizerman, Eli Shechtman,
Rahul Garg, Steve Seitz]

Lens Blur[Carlos Hernandez]

Lens Blur[Carlos Hernandez]
Why am I here?

What if no texture?

Why priors?
• Fails in some important cases
• Noise suppression
• Compression

Why priors?
• Fails in some important cases
• Noise suppression
• Compression
• Uncanny valley for 3D reconstruction

Uncanny valley for 3D reconstruction

More accurate, but looks worse
Less accurate, but looks better

People like everything about this picture

3D photography hates everythingabout this picture






Uncanny Valley for 3D Reconstruction
Ten Things You Should Know AboutLarge Scale 3D Reconstruction
(3DV 2013)
Martin Byröd Apple Maps

Why priors?
• Fails in some important cases
• Noise suppression
• Compression
• Uncanny valley for 3D reconstruction

Outline• Why priors?
• Prior enforcement through MRF
• Prior enforcement through primitives
• Prior enforcement through shortest-path

Prior enforcement through MRF

Piecewise planar enforcement through MRF

Motivations
[Furukawa and Ponce, 2007]

Enforce Prior in MVS• Manhattan-world assumption
• Planarity
• Orthogonality

8.0
8.2
8.5
8.9
9.3
camera center image
screen
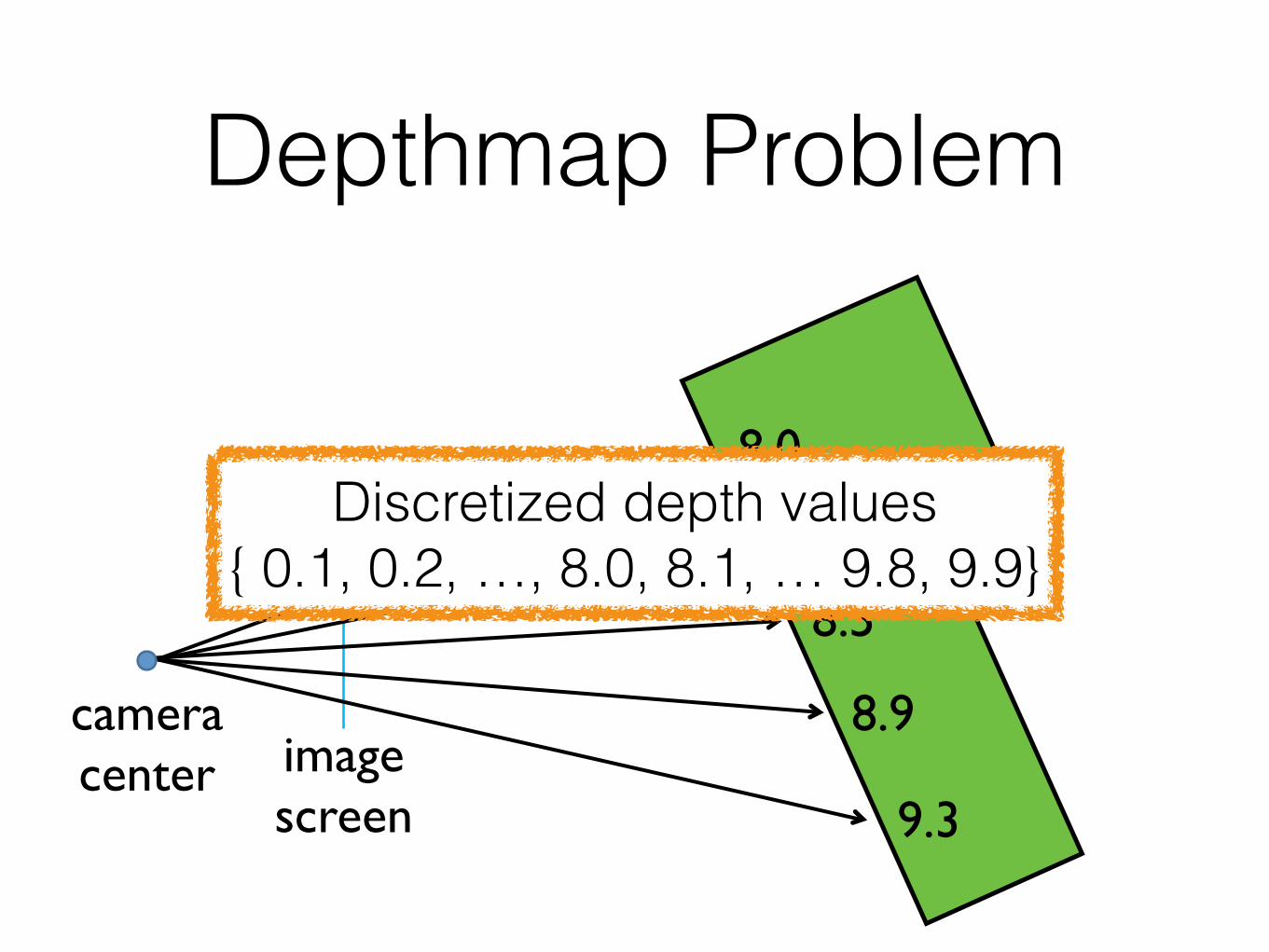
Depthmap Problem
8.0
8.2
8.5
8.9
9.3
camera center image
screen
Depthmap Problem
Discretized depth values{ 0.1, 0.2, …, 8.0, 8.1, … 9.8, 9.9}

Standard DepthmapMarkov Random Field (MRF)
A Comparative Study of Energy Minimization Methods for Markov Random Fields with Smoothness-Based Priors [Szeliski et al., PAMI 2008]

A Comparative Study of Energy Minimization Methods for Markov Random Fields with Smoothness-Based Priors [Szeliski et al., PAMI 2008]
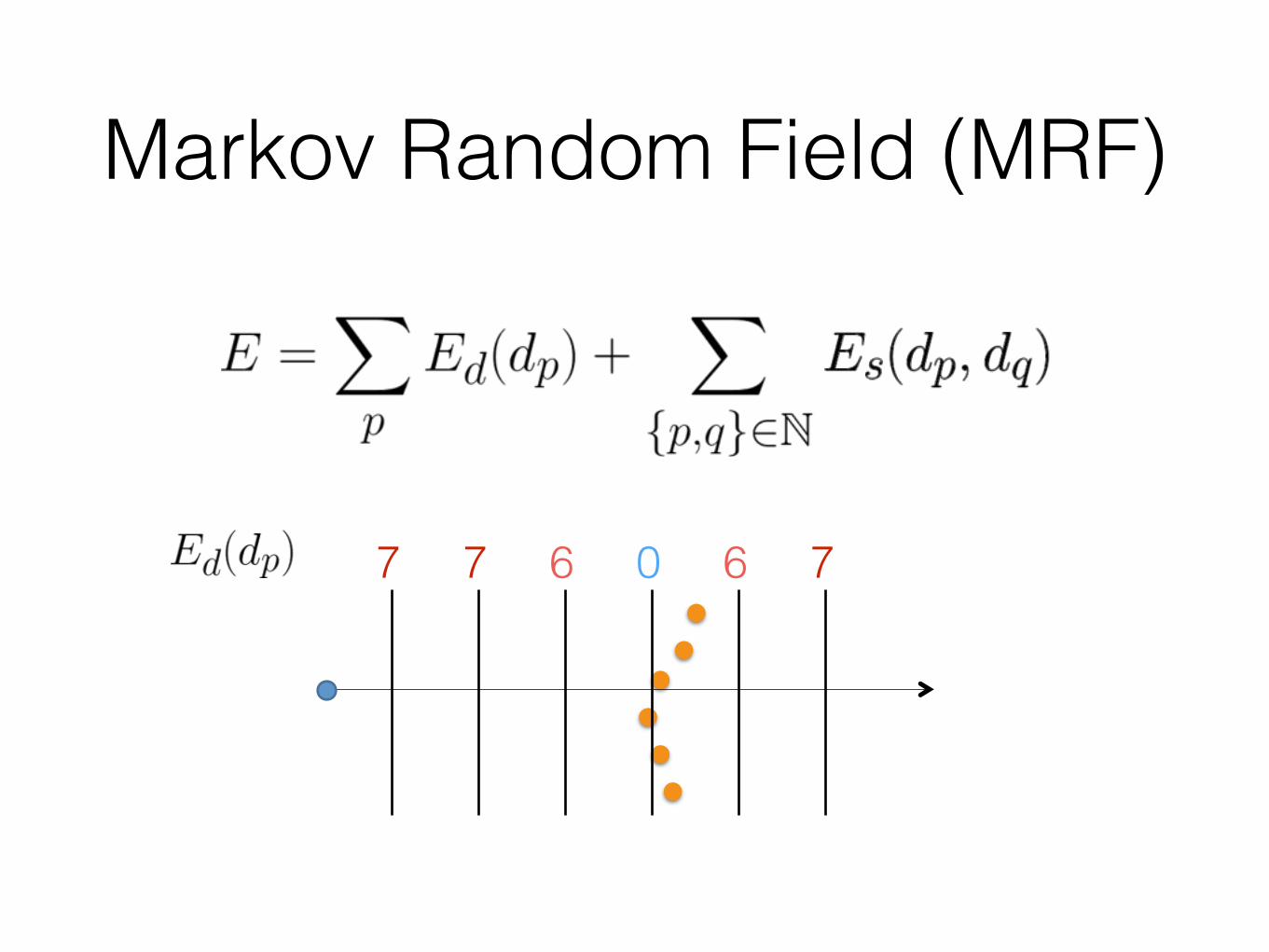
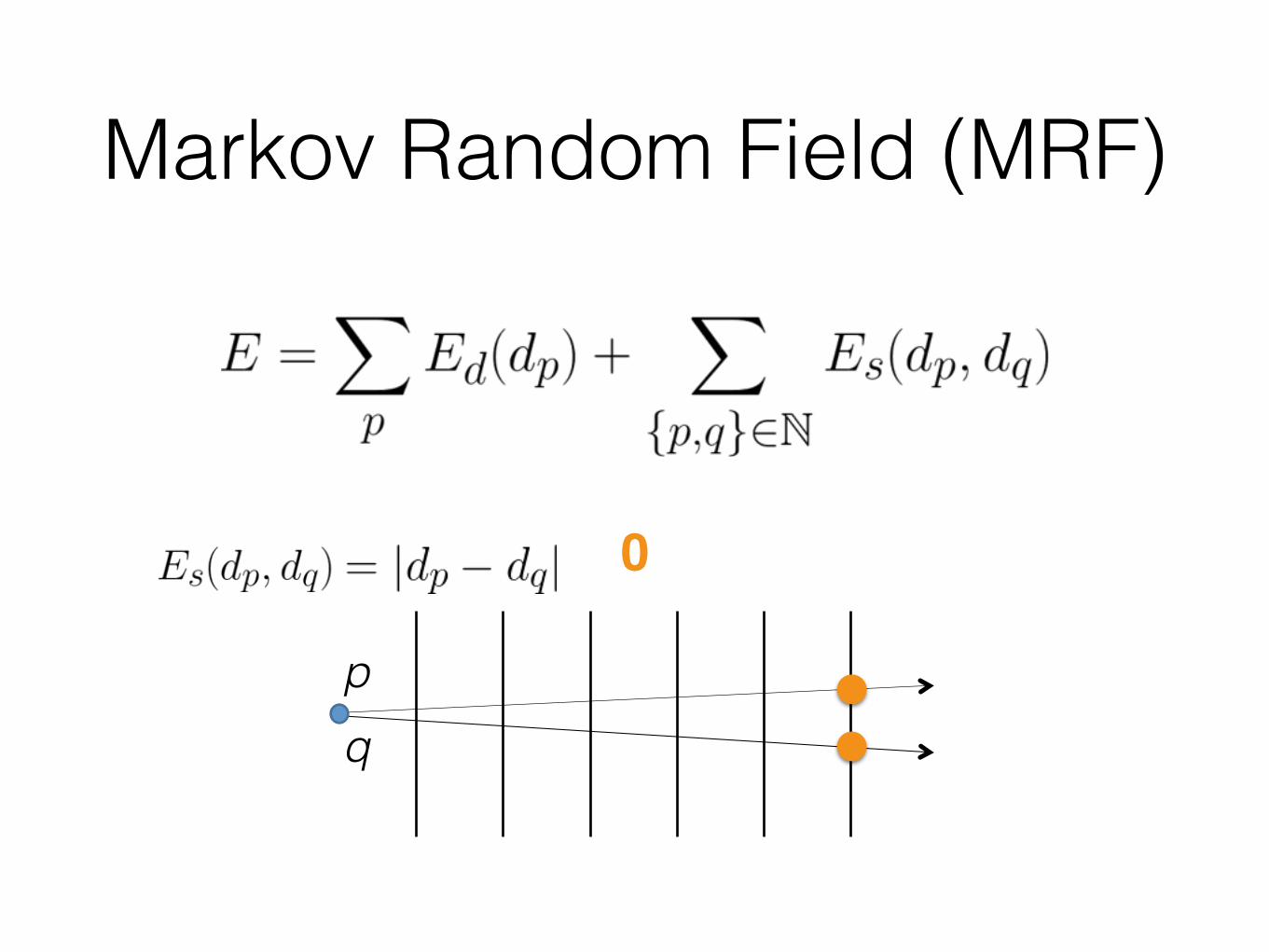
Markov Random Field (MRF)

Markov Random Field (MRF)
Markov Random Field (MRF)
7 7 6 0 6 7

pq
Markov Random Field (MRF)

pq
Markov Random Field (MRF)

0
pq
Markov Random Field (MRF)

1
pq
Markov Random Field (MRF)

2
pq
Markov Random Field (MRF)
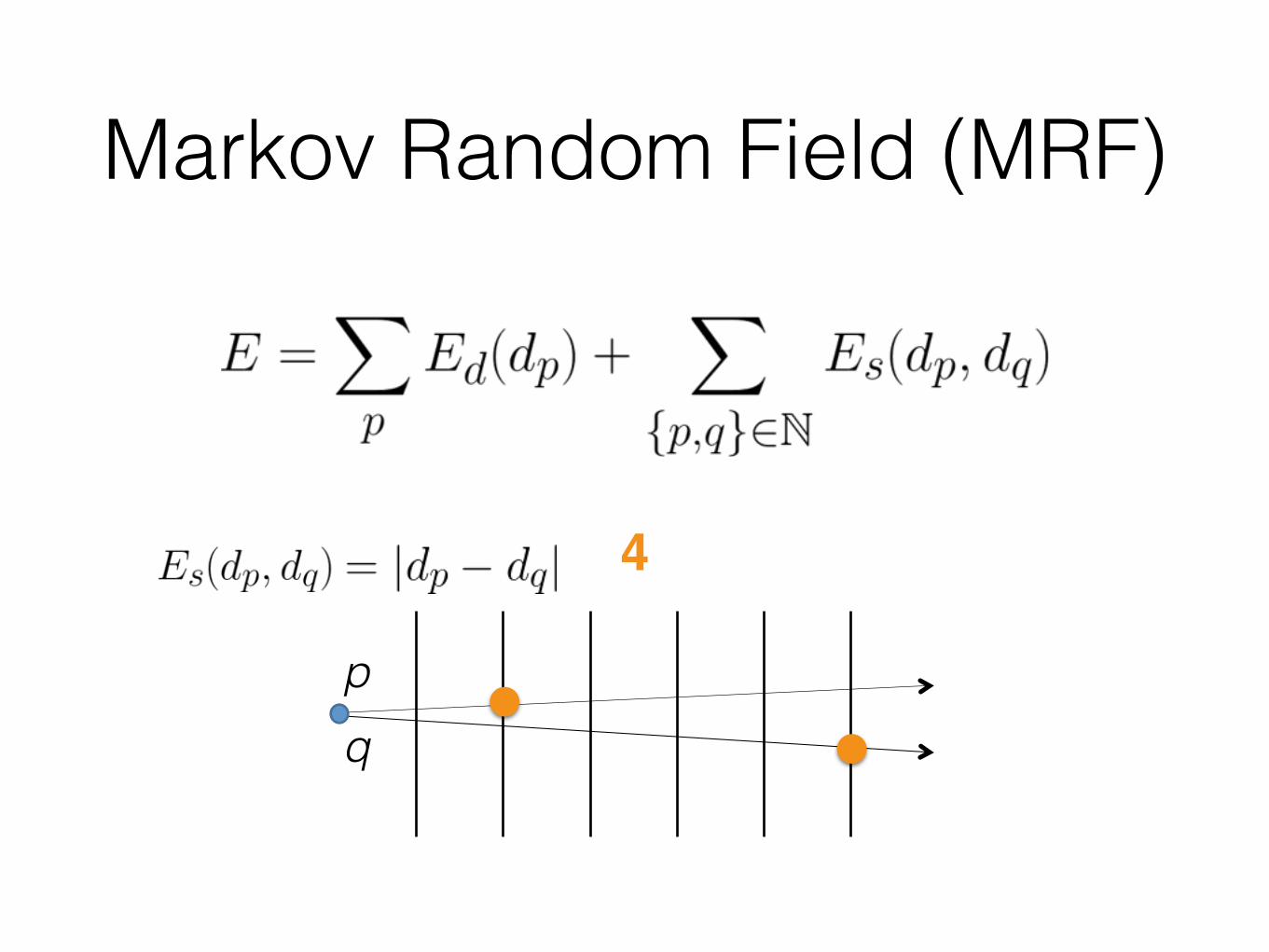
4
pq
Markov Random Field (MRF)
0
pq
Markov Random Field (MRF)
Markov Random Field (MRF)
Graph-cuts (alpha-expansion)gives you very good solutions

Prefers front-parallel surfaces
Markov Random Field (MRF)

We want piecewise planar


Piecewise planarity from MRF1. Advanced MRF and optimization
• Global Stereo Reconstruction under Second Order Smoothness Priors [Woodford et al., CVPR 2008] Best Paper Award
2. Integrate with top-down (primitive) approach
• Manhattan World Stereo [Furukawa et al., CVPR 2009]
• Piecewise Planar Stereo for Image-based rendering [Sinha et al., ICCV 2009]
• Fusion of Feature- and Area-Based Information for Urban Buildings Modeling from Aerial Imagery [Zebedin et al., ECCV 2008]
• Piecewise Planar and Non-Planar Stereo for urban Scene Reconstruction [Gallup et al., CVPR 2010]

Advanced MRF for Depthmap Estimation
Global Stereo Reconstruction under Second Order Smoothness Priors[Woodford et al., CVPR 2008] Best Paper Award
Reference image
Ground truth

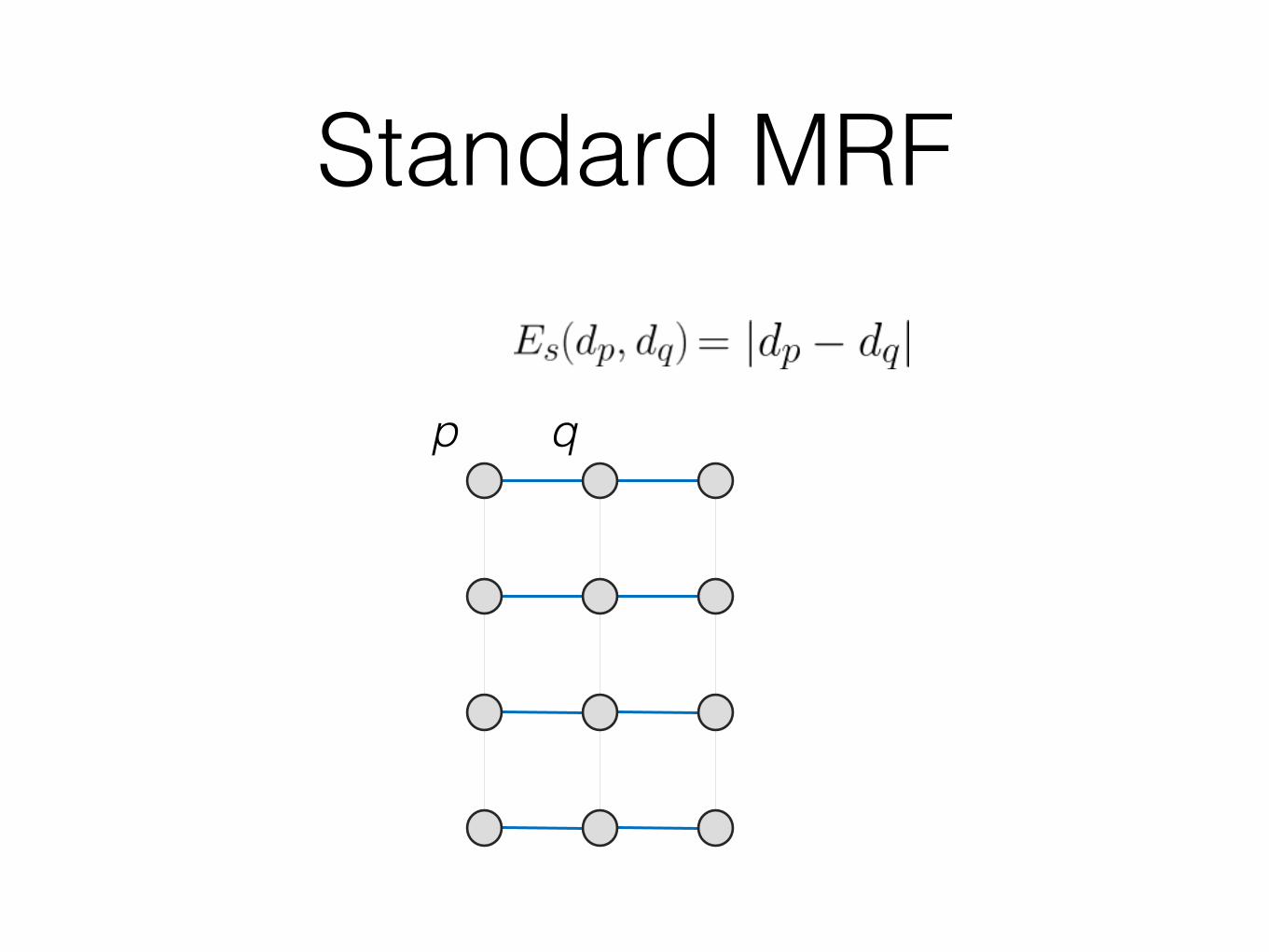
Standard MRF
Standard MRF
p q

Standard MRF
p
q

Standard MRF
p q

Standard MRF
p q
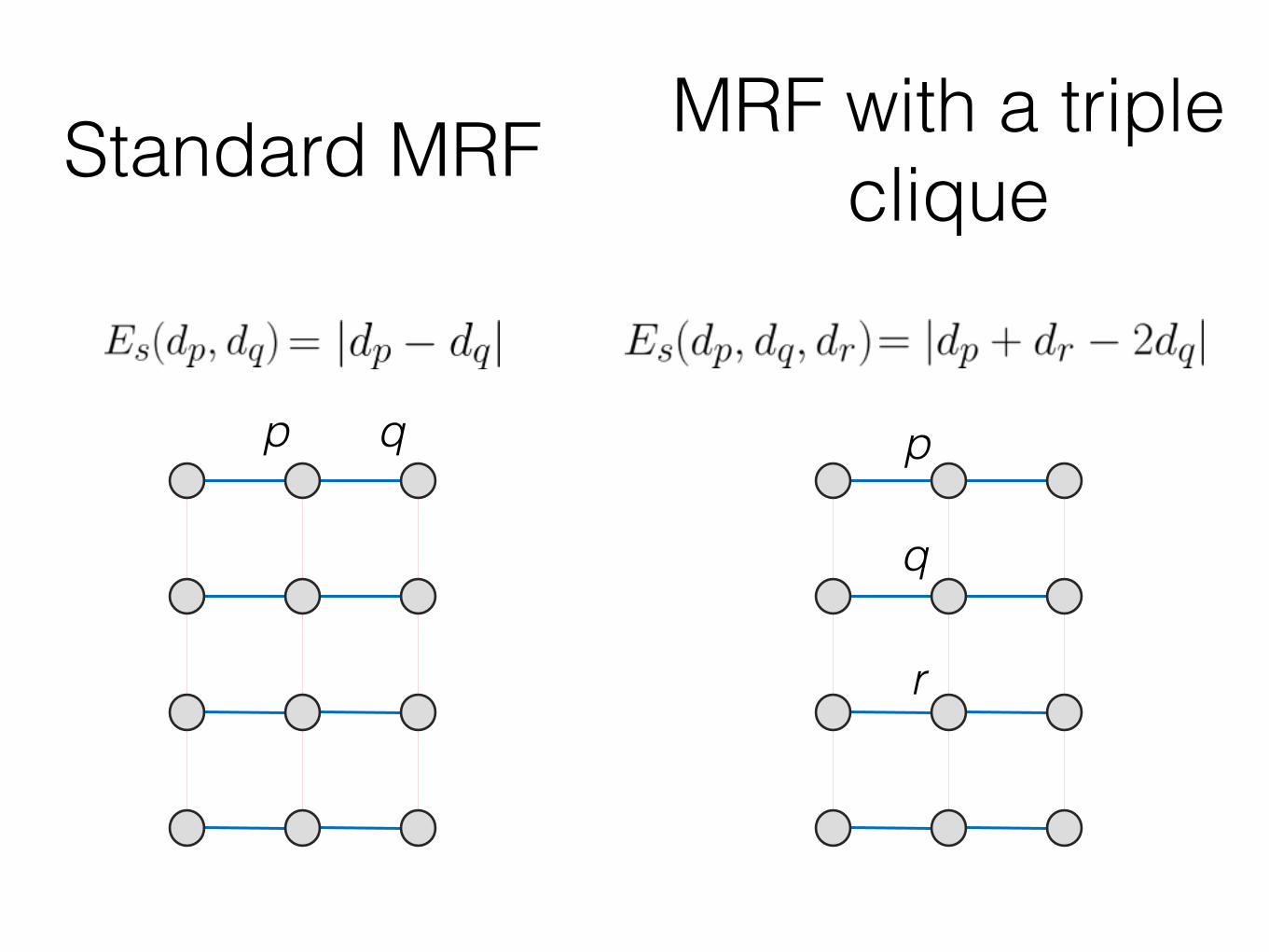
MRF with a triple clique
p q r

Standard MRF
p q
MRF with a triple clique
p q r

Standard MRF
p q
MRF with a triple clique
p q r
0 = |3 + 5 - 2 x 4|

Standard MRF
p q
MRF with a triple clique
p q r
0 = |3 + 5 - 2 x 4|

Standard MRF
p q
MRF with a triple clique
p
q
r
Standard MRF
p q
MRF with a triple clique
p
q
r

MRF with a triple clique

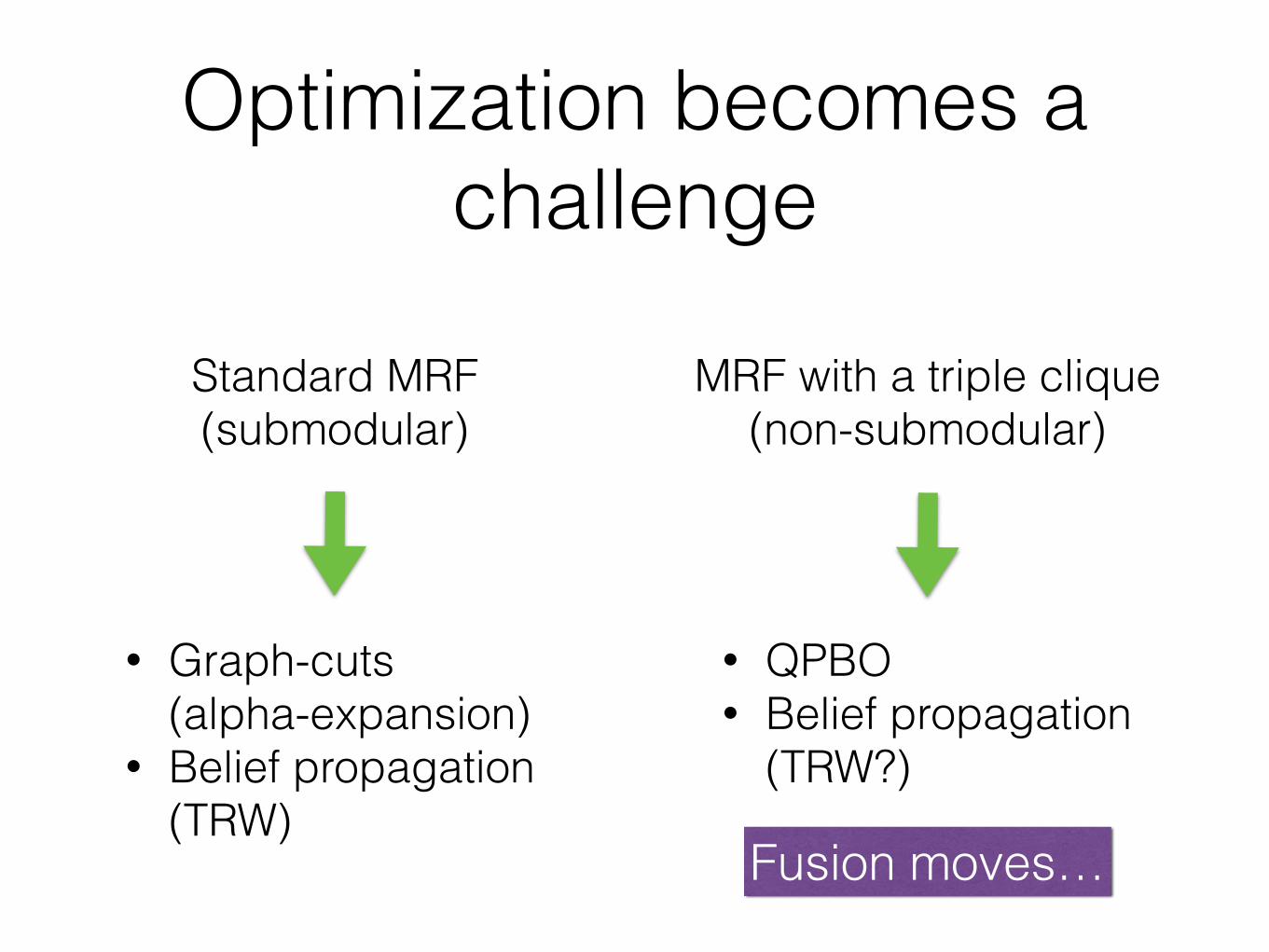
Optimization becomes a challenge
Standard MRF (submodular)
MRF with a triple clique (non-submodular)
• Graph-cuts(alpha-expansion)
• Belief propagation(TRW)
• QPBO • Belief propagation
(TRW?)
Optimization becomes a challenge
Standard MRF (submodular)
MRF with a triple clique (non-submodular)
• Graph-cuts(alpha-expansion)
• Belief propagation(TRW)
• QPBO • Belief propagation
(TRW?)
Fusion moves…

Experimental resultsReference image Neighboring image
Output depthmap
[Woodford et al.]

Comparative experimentReference image Ground truth
Standard MRF MRF with a triple clique
[Woodford et al.]

How to enforce piecewise planar1. Advanced MRF and optimization
• Global Stereo Reconstruction under Second Order Smoothness Priors [Woodford et al., CVPR 2008] Best Paper Award
2. Integrate with top-down (primitive) approach
• Manhattan World Stereo [Furukawa et al., CVPR 2009]
• Piecewise Planar Stereo for Image-based rendering [Sinha et al., ICCV 2009]
• Fusion of Feature- and Area-Based Information for Urban Buildings Modeling from Aerial Imagery [Zebedin et al., ECCV 2008]
• Piecewise Planar and Non-Planar Stereo for urban Scene Reconstruction [Gallup et al., CVPR 2010]
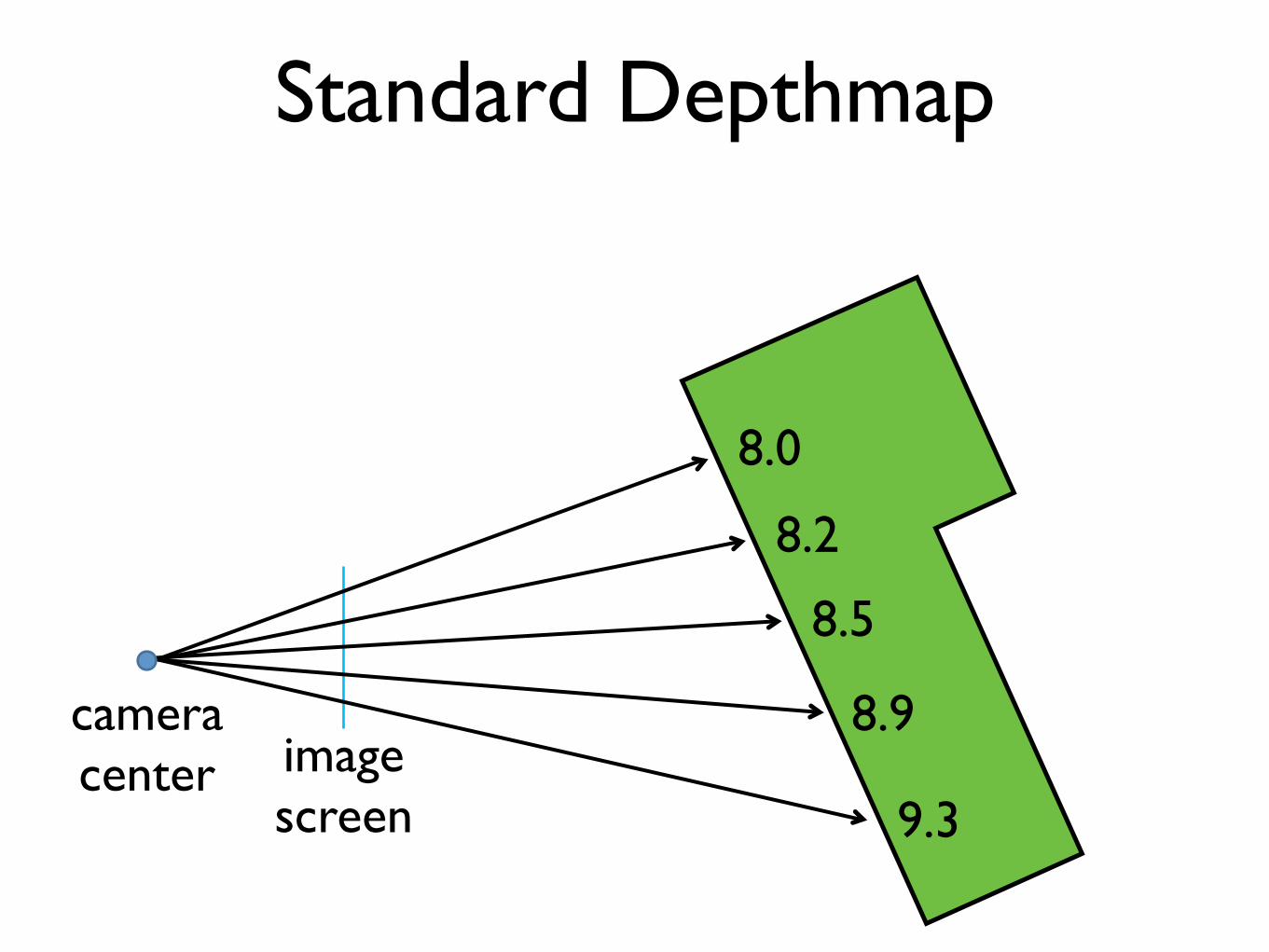
Standard Depthmap
8.0
8.2
8.5
8.9
9.3
camera center image
screen

Planemap
[Furukawa and Ponce, 2007]
1. Extract Manhattandirections
2. Extract planes
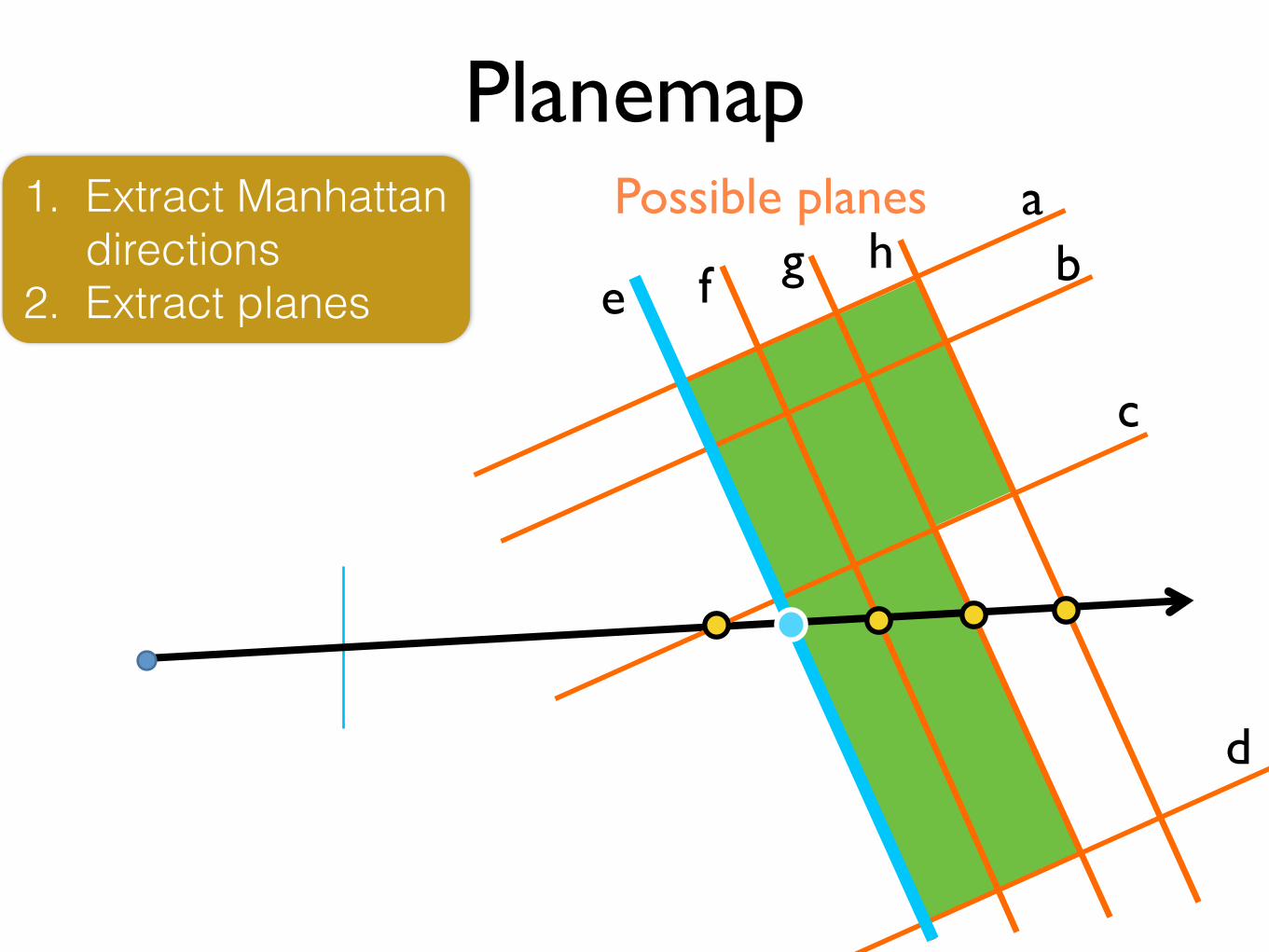
PlanemapPossible planes a
b
c
d
e f g h1. Extract Manhattan
directions 2. Extract planes

PlanemapPossible plane ids a
b
c
d
e f g h
e
e
e
e
e
1. Extract Manhattandirections
2. Extract planes

Depthmap to PlanemapDepthmap ( )
Planemap ( )

Planemap MRF

Planemap MRF
p

Planemap MRF
p
7 6 0 6 7

Planemap MRF
p
10 3 10

Planemap MRF
0
pq

Planemap MRF
2
pq

Planemap MRF
3
pq

Planemap MRF
8
pq

Comparison
Standard method Manha9an Planemap

Kitchen -‐ 22 images
house -‐ 148 images
gallery -‐ 492 images
Reconstruction Results


How to enforce piecewise planar1. Advanced MRF and optimization
• Global Stereo Reconstruction under Second Order Smoothness Priors [Woodford et al., CVPR 2008] Best Paper Award
2. Integrate with top-down (primitive) approach
• Manhattan World Stereo [Furukawa et al., CVPR 2009]
• Piecewise Planar Stereo for Image-based rendering [Sinha et al., ICCV 2009]
• Fusion of Feature- and Area-Based Information for Urban Buildings Modeling from Aerial Imagery [Zebedin et al., ECCV 2008]
• Piecewise Planar and Non-Planar Stereo for urban Scene Reconstruction [Gallup et al., CVPR 2010]

20 seconds break

How to enforce piecewise planar1. Advanced MRF and optimization
• Global Stereo Reconstruction under Second Order Smoothness Priors [Woodford et al., CVPR 2008] Best Paper Award
2. Integrate with top-down (primitive) approach
• Manhattan World Stereo [Furukawa et al., CVPR 2009]
• Piecewise Planar Stereo for Image-based rendering [Sinha et al., ICCV 2009]
• Fusion of Feature- and Area-Based Information for Urban Buildings Modeling from Aerial Imagery [Zebedin et al., ECCV 2008]
• Piecewise Planar and Non-Planar Stereo for urban Scene Reconstruction [Gallup et al., CVPR 2010]

Relaxing Mahnattan
Piecewise Planar Stereo for Image-based rendering [Sinha et al., ICCV 2009]
• Use sparse lines + sparse points to detect planes
• MRF + Graph-cuts

Relaxing Manhattan
[Sinha et al.]

Relaxing Manhattan
[Sinha et al.]

Enable Curved Surfaces• Building reconstruction from a top down view
Fusion of Feature- and Area-Based Information for Urban Buildings Modeling from Aerial Imagery [Zebedin et al., ECCV 2008]
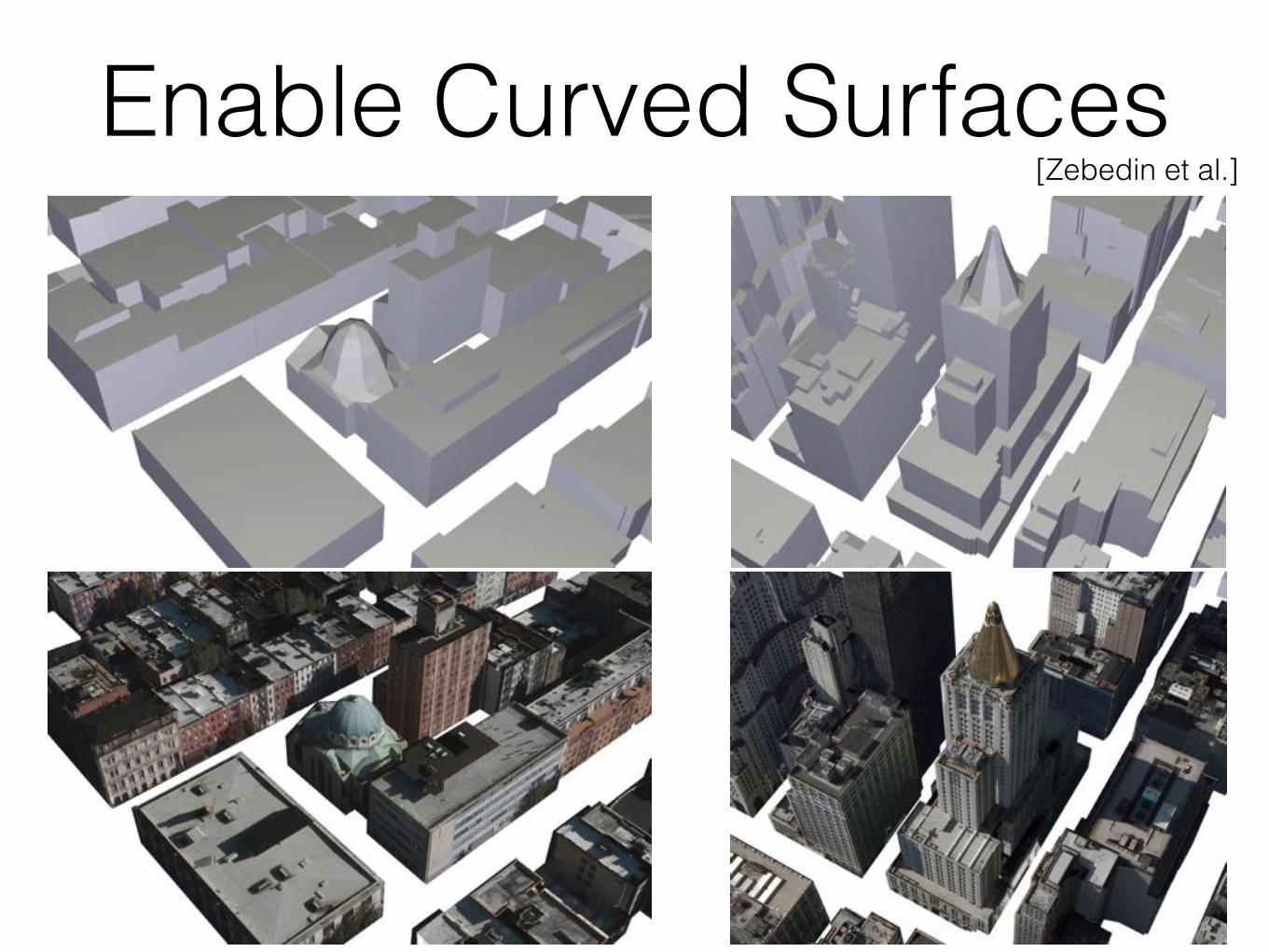
Enable Curved Surfaces[Zebedin et al.]

How to enforce piecewise planar1. Advanced MRF and optimization
• Global Stereo Reconstruction under Second Order Smoothness Priors [Woodford et al., CVPR 2008] Best Paper Award
2. Integrate with top-down (primitive) approach
• Manhattan World Stereo [Furukawa et al., CVPR 2009]
• Piecewise Planar Stereo for Image-based rendering [Sinha et al., ICCV 2009]
• Fusion of Feature- and Area-Based Information for Urban Buildings Modeling from Aerial Imagery [Zebedin et al., ECCV 2008]
• Piecewise Planar and Non-Planar Stereo for urban Scene Reconstruction [Gallup et al., CVPR 2010]

Piecewise Planar and Non-‐Planar Stereo for Urban Scene Reconstruction
David Gallup Jan-‐Michael Frahm Marc Pollefeys
University of North Carolina ETH Zurich
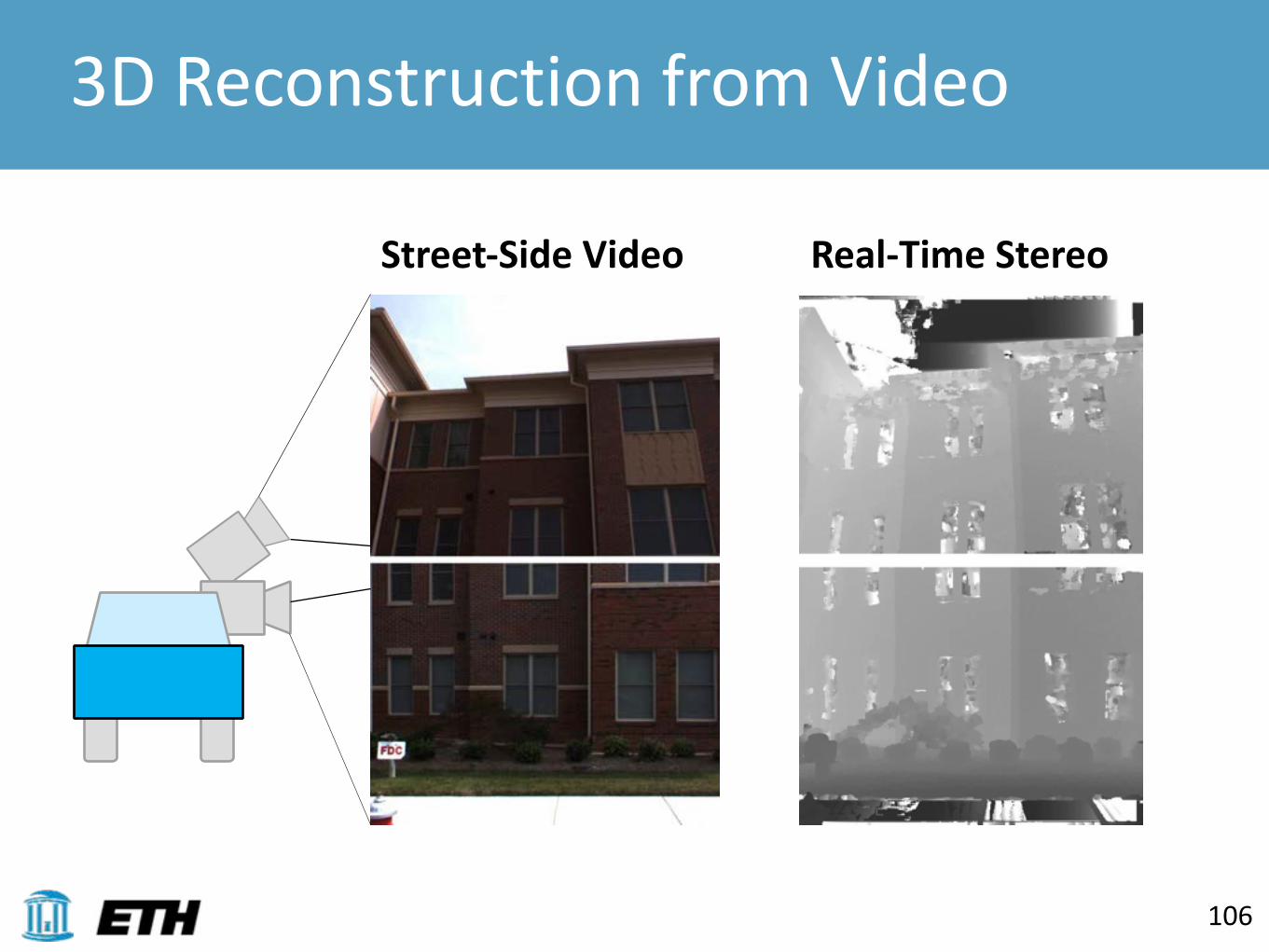
3D Reconstruction from Video
Street-‐Side Video Real-‐Time Stereo
106

Idea
3D ReconstructionVideo Frames
107
Enforce planarity where it looks like a building

First step: Planar and Non-‐Planar Stereo
108
Video
Real-‐Time Stereo Plane Detection Planemap (w/ non-‐planar))
Labels =
planes non-‐plane discard

Second step: Appearance Prior
109
Video Frames

Classification• divide image into regular grid • RGB, HSV, hue histogram, edge orientation histogram • 5000 human-‐labeled examples (5 images) • k-‐nearest-‐neighbor classifier
non-‐planar planar110
Hoiem et al. 2005, Xiao et al. 2009

AlgorithmVideo
Real-‐Time Stereo
Planar/Non-‐Planar Classification
Plane Detection
Planar and Non-‐Planar MRF
111
non-‐planar planar
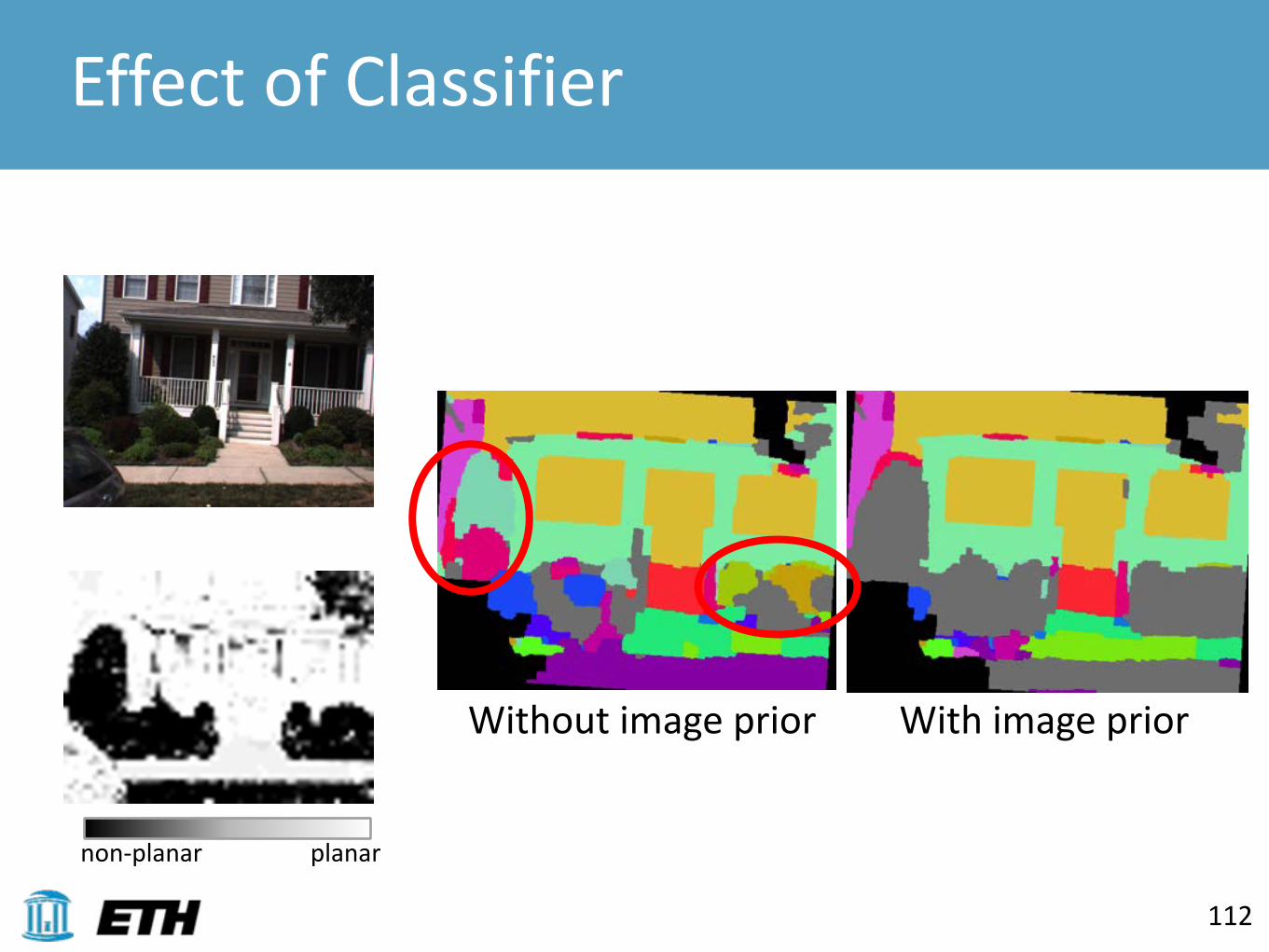
Effect of Classifier
112
Without image prior With image prior
non-‐planar planar
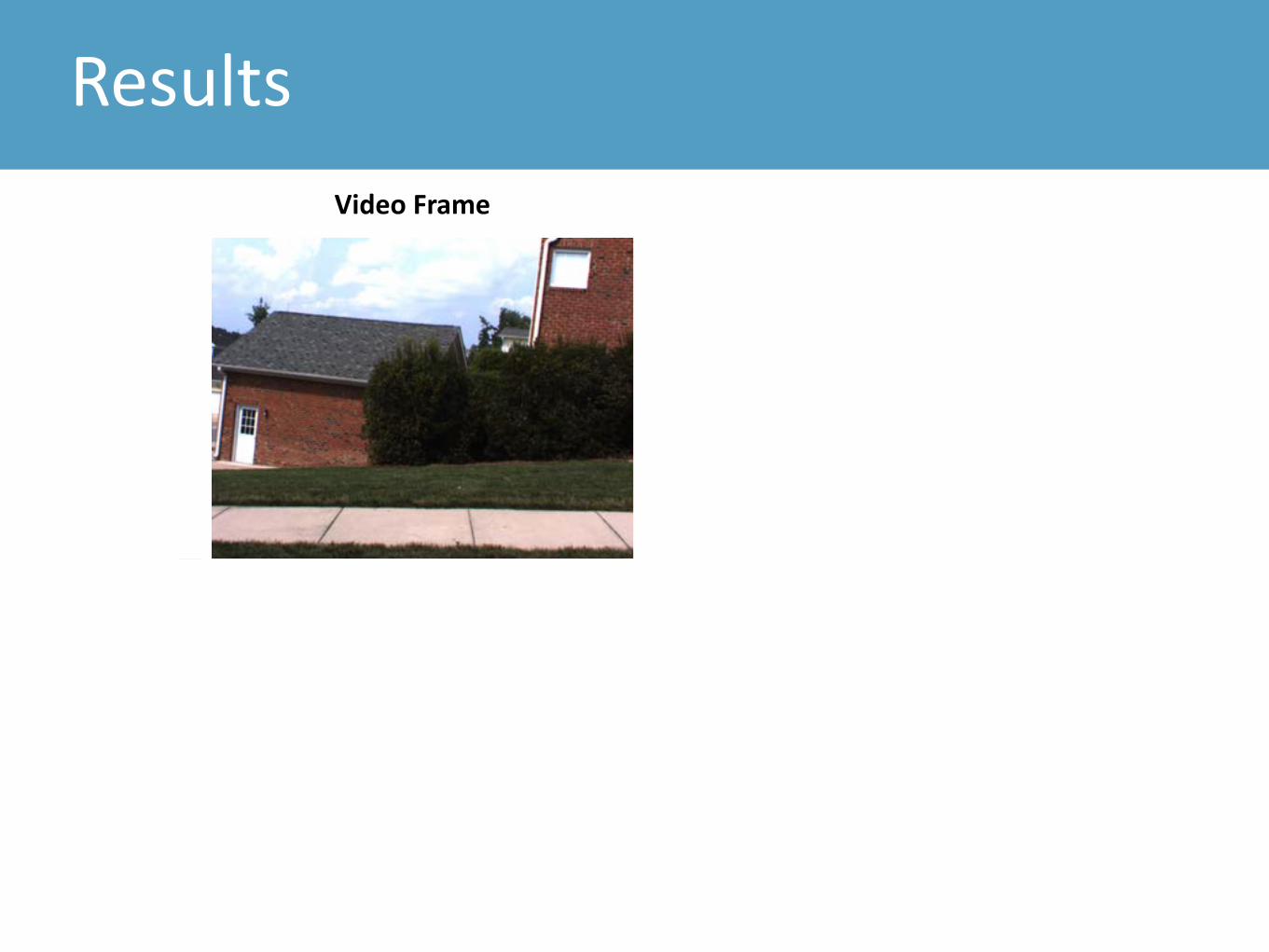
Results
113
Video Frame Plane Detection
Planar Classification Reconstruction
non-‐planar
planar

Results
114

Summary: Shape priorsin Depthmap MVS
MRF with a triple term
Manhattan planemap Planemap
Planemap w/ curved surfaces Mix of planemap and depthmap
Outline
• Why priors?
• Prior enforcement through MRF
• Prior enforcement through primitives
• Prior enforcement through shortest-path

Priors through primitives for large-scale indoor modeling
“Reconstructing the World’s Museums” [Xiao and Furukawa, 2012]
(Best Student Paper Award)


Technical Contributions
• Architectural shape priors through primitives
• Single consistent 3D model

Technical Contributions• Architectural shape priors through primitives
• Single consistent 3D model
Inverse Constructive Solid Geometry (CSG)

Technical Contributions
Inverse Constructive Solid Geometry (CSG)
• Architectural shape priors through primitives!
• Single consistent 3D model (real merging)

+
Technical Contributions
Inverse Constructive Solid Geometry (CSG)
• Architectural shape priors through primitives
• Single consistent 3D model (real merging)
+
+
-
+
+
-

CGAL
• From CSG to a mesh

Algorithm

Cut into Slices
gravityside view

Cut into Slices
point count

Cut into Slices

2D CSG Reconstruction

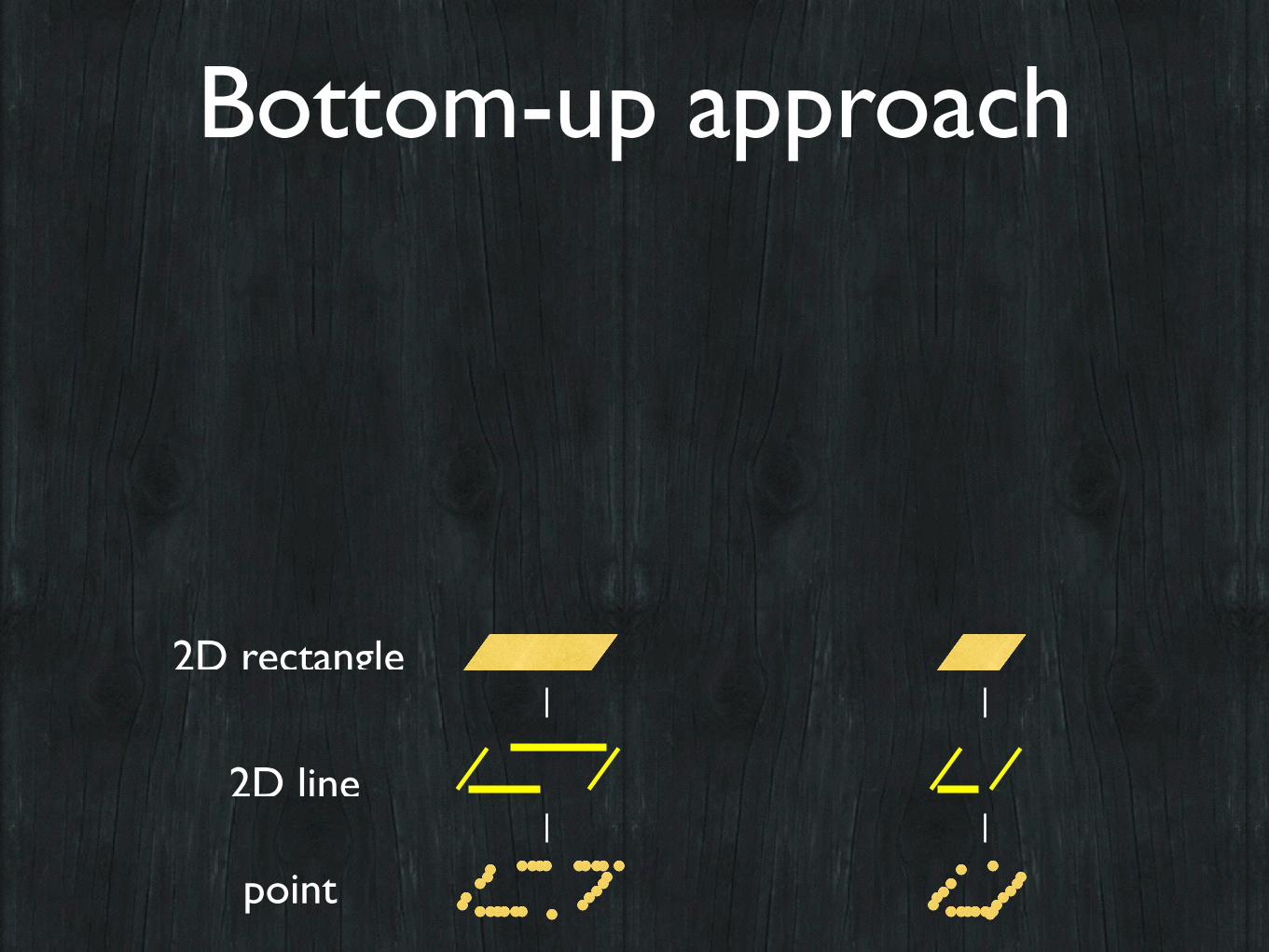
Bottom-up approach
point
2D line
2D rectangle
2D CSG

2D CSG Reconstruction
point à line

2D CSG Reconstruction
point à line
line à rectangle
From 4 line segments

2D CSG Reconstruction
point à line
line à rectanglerectangle à 2D CSG

2D CSG Reconstruction
Explain the data • Laser points • Free space
!
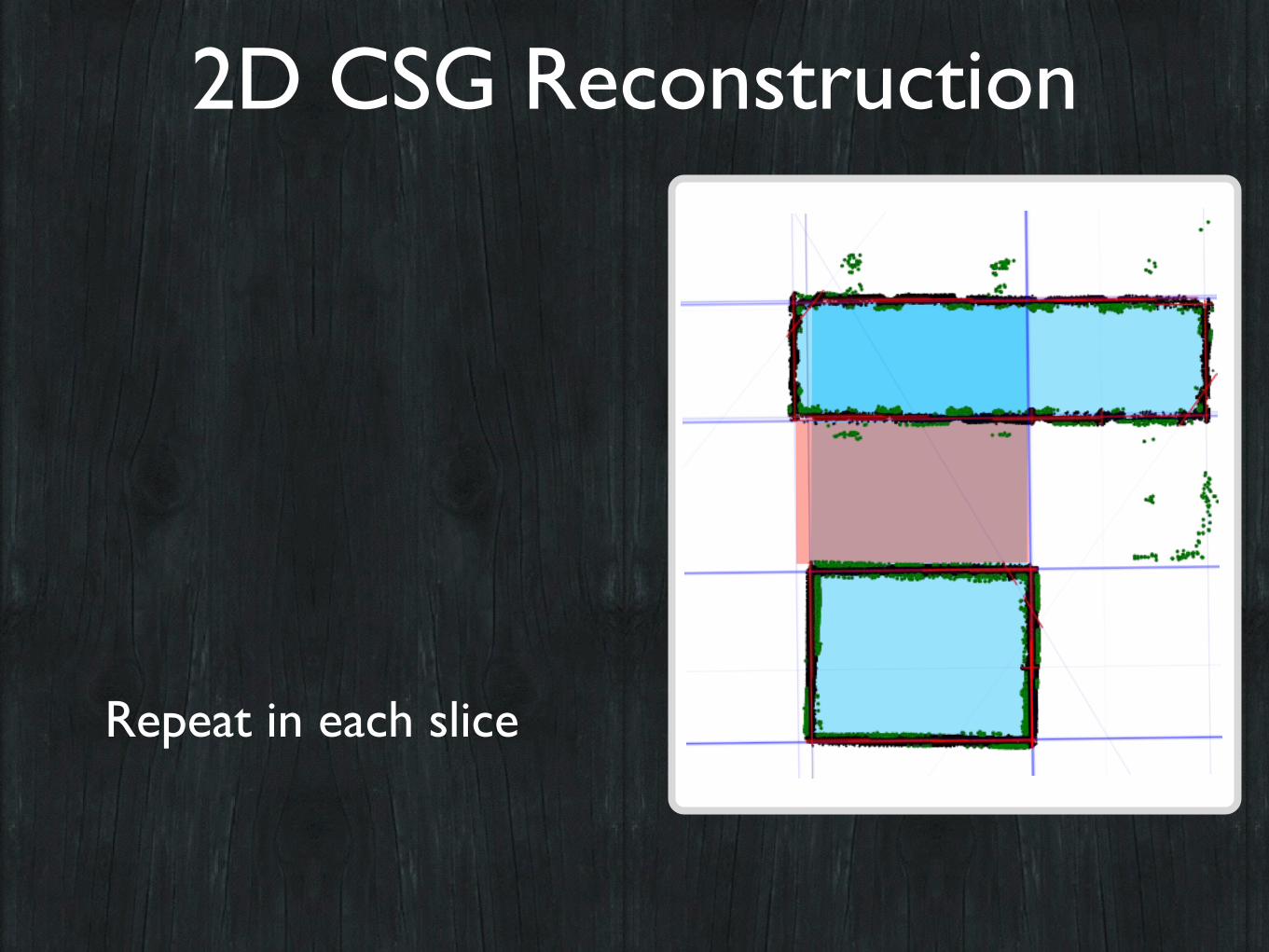
2D CSG Reconstruction
Repeat in each slice

3D CSG Reconstruction

Bottom-up approach
point
2D line
2D rectangle
2D CSG

Bottom-up approach
point
2D line
2D rectangle
2D CSG
Bottom-up approach
point
2D line
2D rectangle

point
2D line
2D rectangle
3D rectangle
3D CSG

2D CSG to 3D CSG

2D CSG
Rectangle primitive
2D CSG to 3D CSG

2D CSG
Rectangle primitive
2D CSG to 3D CSG

1. Generate primitives (cuboids)
2D CSG
Rectangle primitive
2D CSG to 3D CSG

3D CSG Reconstruction1. Generate primitives (cuboids)2. Build a 3D CSG

Algorithm on Run

Last Step
1. Remove Ceiling 2. Texture Mapping


Challenging Navigation
Frick Collection Gallery (New York City)
Goal
Start



Statistics
# of sub problems

Ground Ground+Aerial
Outdoor
Indoor
Ground vs. Aerial à Ground+Aerial
Google Streetview Google MapsGL
Furukawa et al.
Aerial
Google/Bing/NASA …
This paper This paper

So, museum recons. from
very high-end devices

“museums”

“restaurants”

“grocery stores”

{# of museums} <<{# of restaurants} + {# of grocery stores} +{# of clinic} + ...

Millions of small/medium-scale businesses
• Image-based for scalable deployment(especially for emerging markets)
• Compact model(for browser on low-end PCs)

Millions of small/medium-scale businesses
• Image-based for scalable deployment(especially for emerging markets)
• Compact mesh model(for browser on low-end PCs)

[ Cabral and Furukawa, 2014 ]

Outline
• Why priors?
• Prior enforcement through MRF
• Prior enforcement through primitives
• Prior enforcement through shortest-path

2D outline reconstruction

2D outline reconstruction
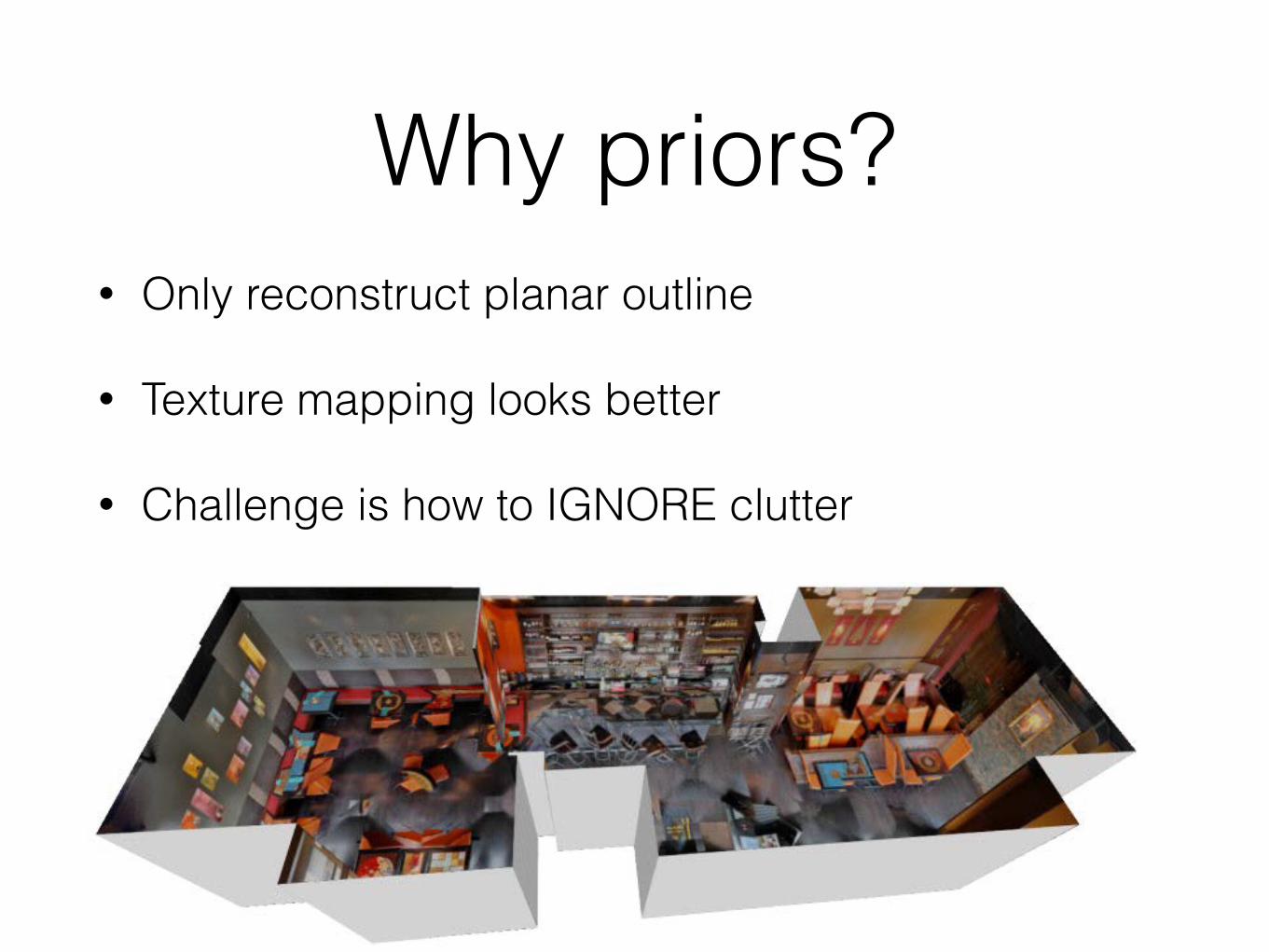
Why priors?• Only reconstruct planar outline
• Texture mapping looks better
• Challenge is how to IGNORE clutter

Pipeline (standard)

1. Panorama images 2. MVS points
3. Point evidence 4. Free-space evidence
5. 2D room outline 6. 3D model

2D room outline reconstruction3. Point evidence 4. Free-space evidence
Outline should pass through this point
Threshold

2D room outline reconstruction4. Free-space evidence3. Point evidence
5. Shortest path formulation
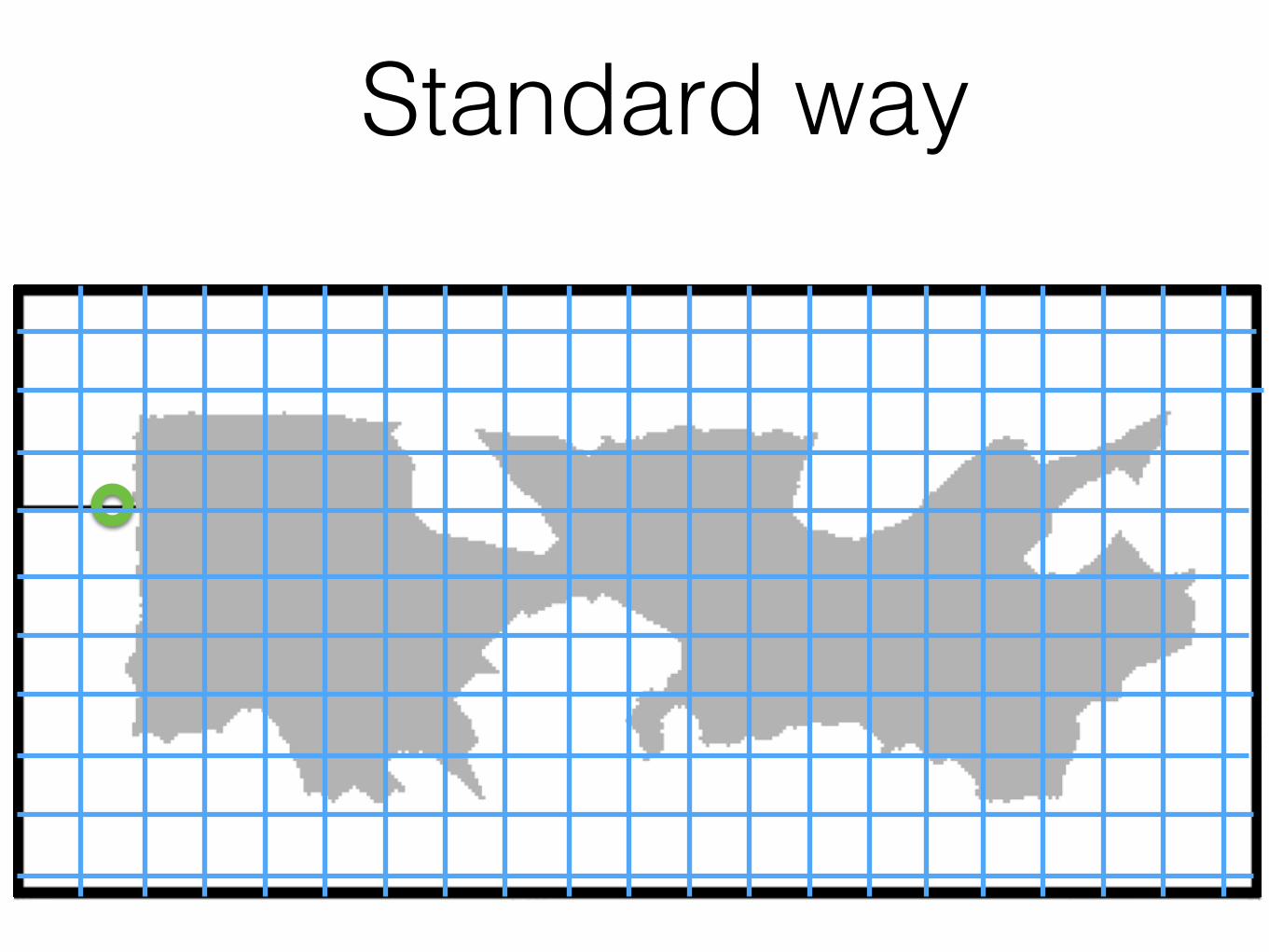
Standard way
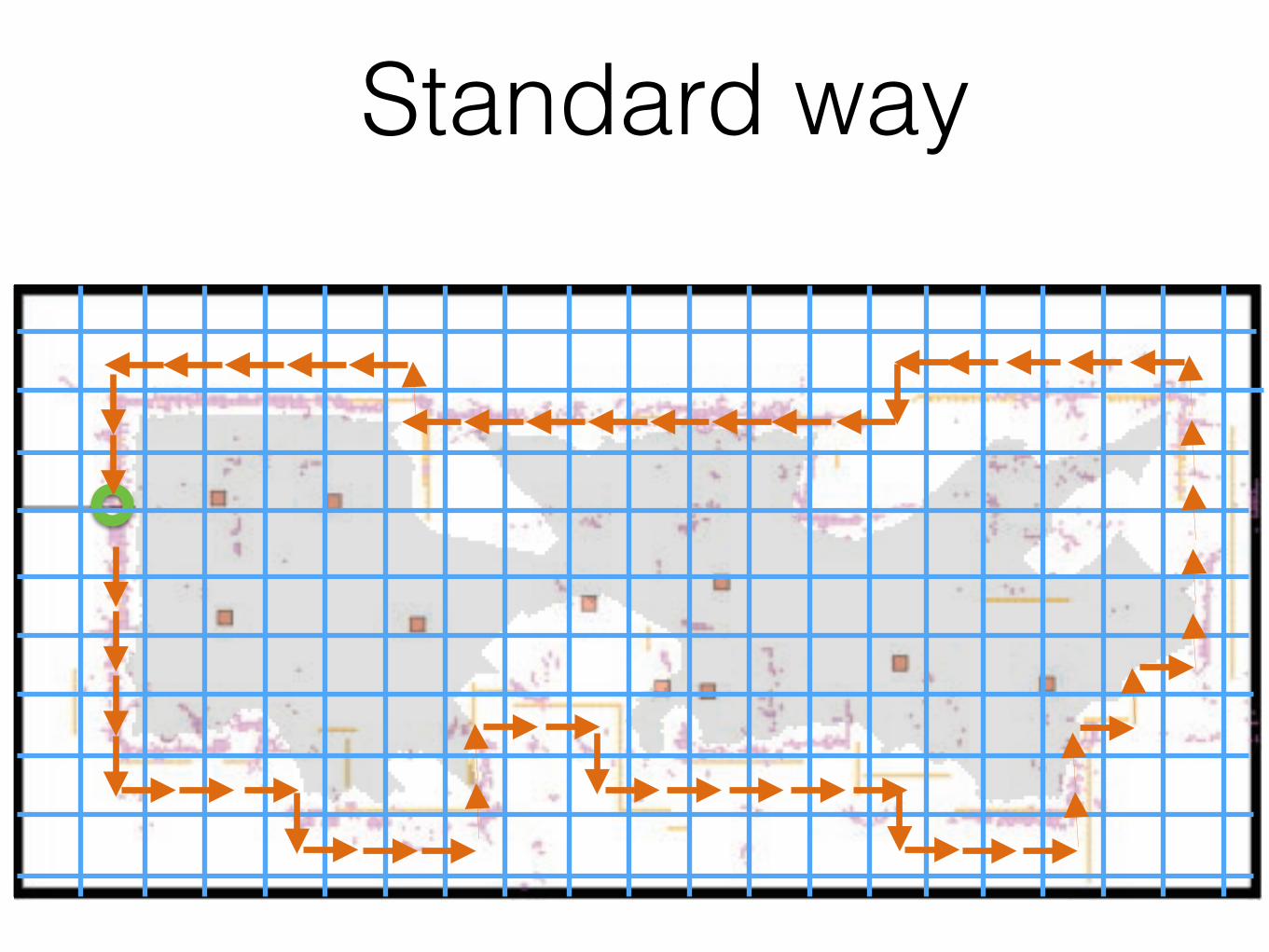
Standard way

Standard way
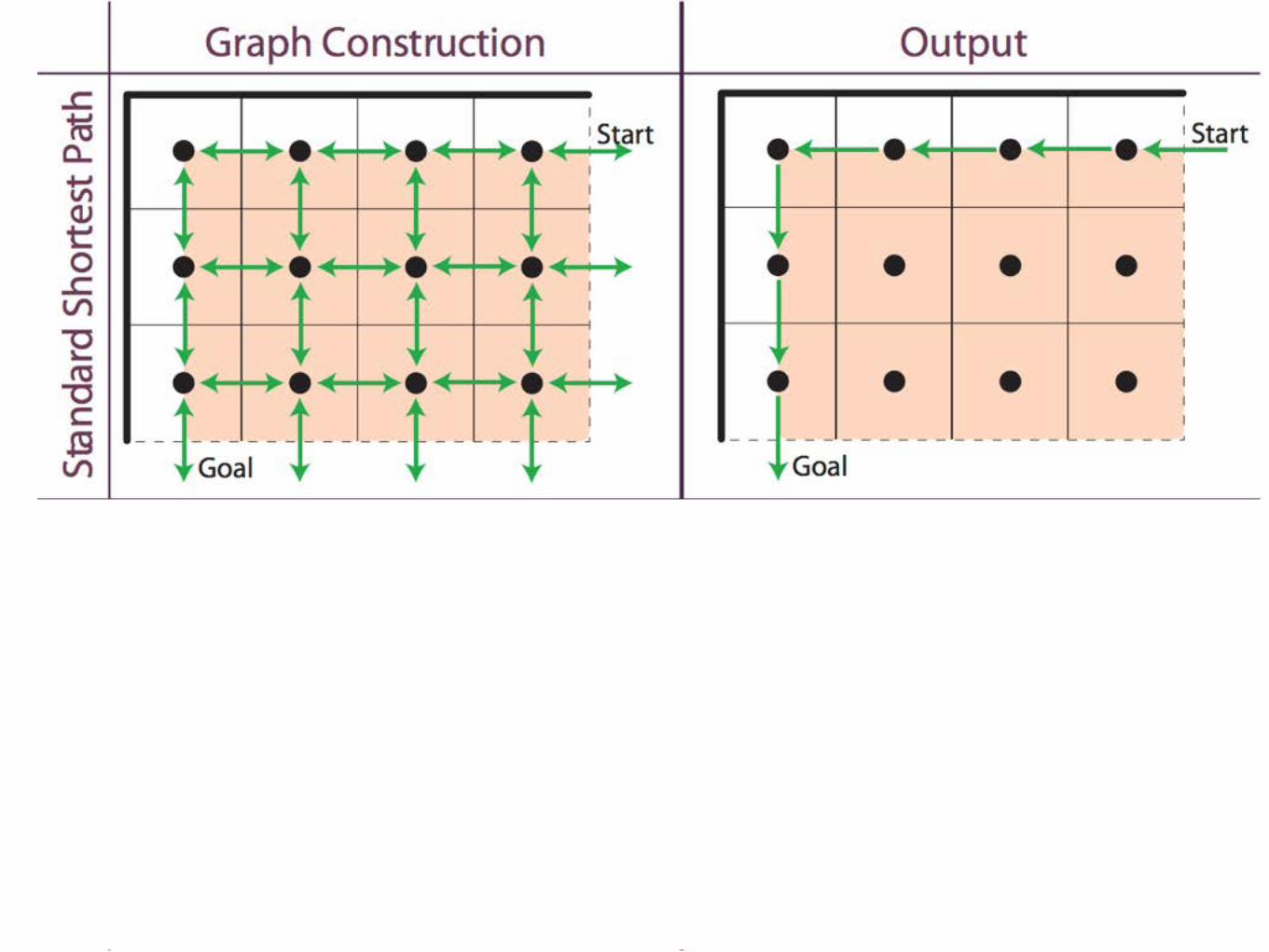
2D room outline reconstruction5. Shortest path formulation

2D room outline reconstruction5. Shortest path formulation

2D room outline reconstruction5. Shortest path formulationModel complexity penalty
added to each edge

2D room outline reconstruction5. Shortest path formulation

2D room outline reconstruction
Standard
Ours

Features
• Regularize on {# of line segments}
• Piecewise planarity enforcement
• With Dynamic Programming,exactly control the number of vertices

13 vertices
Exact complexity control

Exact complexity control
15 vertices

Exact complexity control
17 vertices

Exact complexity control
19 vertices

Exact complexity control
23 vertices

Exact complexity control
27 vertices
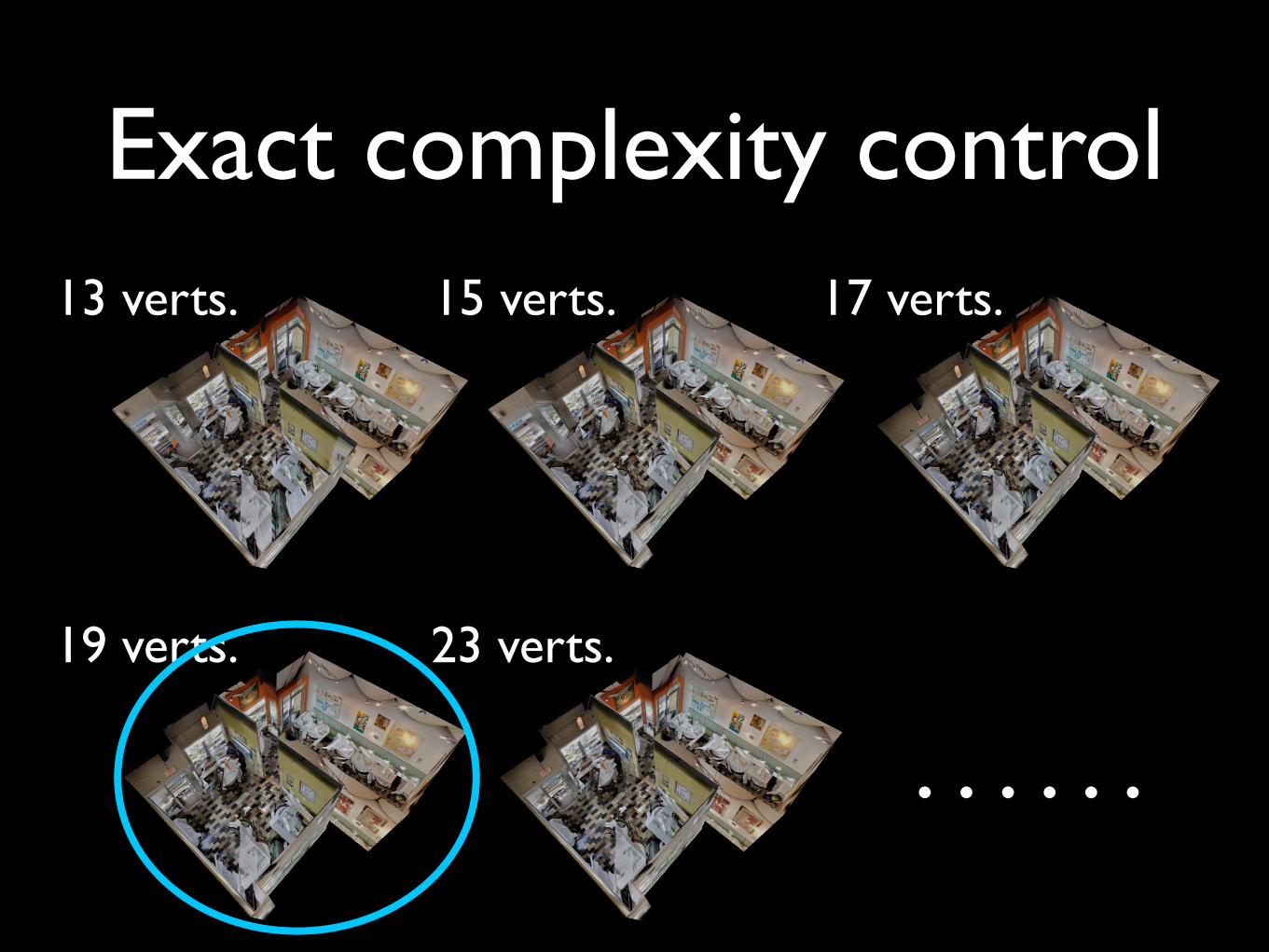
Exact complexity control13 verts. 15 verts. 17 verts.
19 verts. 23 verts.
. . . . . .

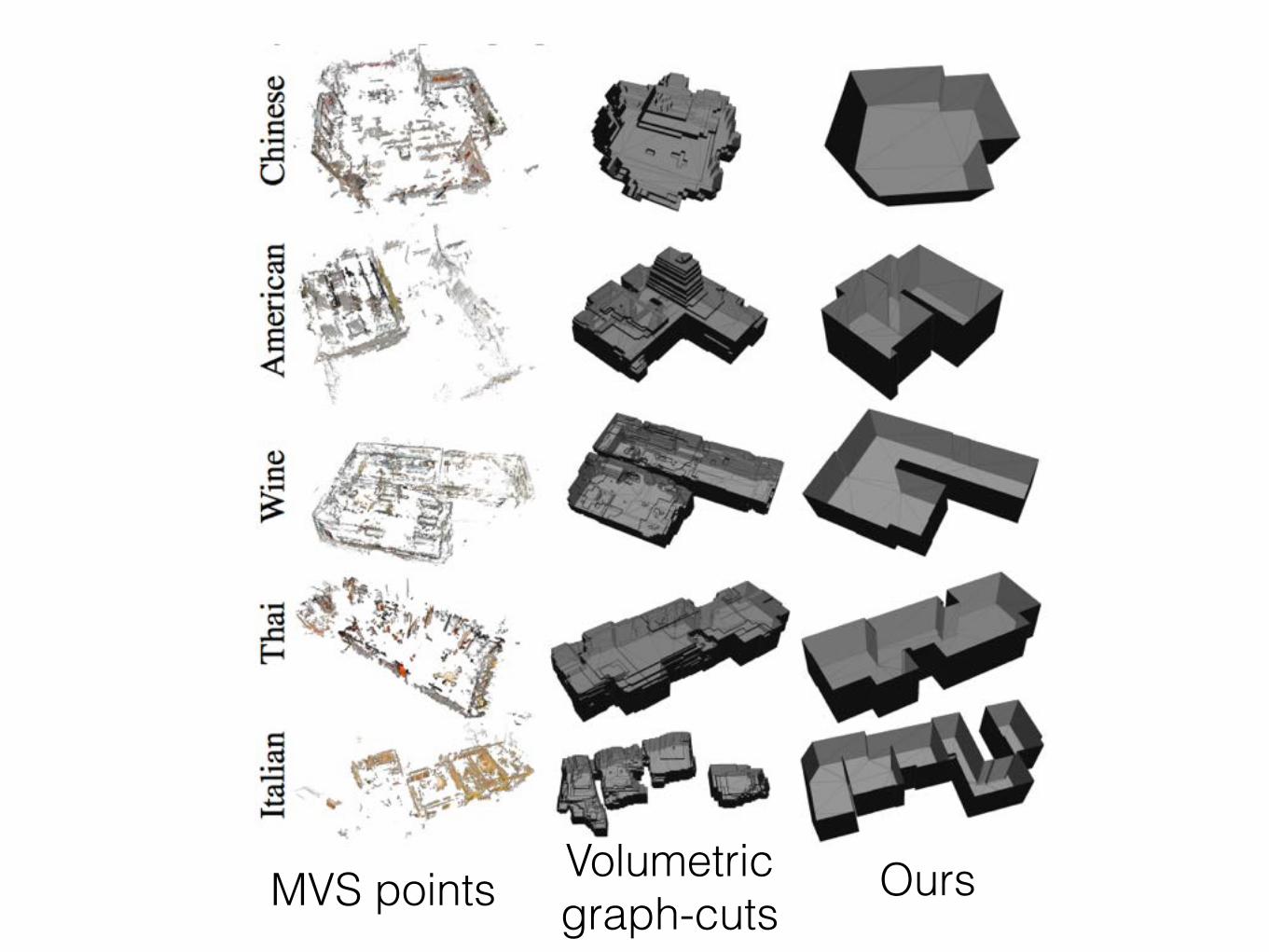
MVS points Volumetric graph-cuts
Ours


Summary• Why priors?
• Prior enforcement through MRF
• Prior enforcement through primitives
• Prior enforcement through shortest-path

Questions

A. Who owns the Haniwa in the volumetric graph-cuts paper?
1. Yasutaka Furukawa.
2. Roberto Cipolla.
3. British Museum.
B. What is Uncanny valley for 3D reconstruction?
1. As the number of authors in a paper goes up, the model quality goes down.
2. As the face realism goes up, the model looks creepier.
3. As the model accuracy goes up, the rendering quality goes down.
C. How can one enforce piecewise planarity with a standard MRF formulation easily?
1. Use super-pixel segmentation.
2. Use primitive detection.
3. Use object recognition.

Lunch Time!


















