Lec15 ManyLights web - Cornell University · • HDR environment map – Apply captured light to...
26
1 Lecture 15: Many Lights CS 6620, Spring 2009 Kavita Bala Computer Science Cornell University © Kavita Bala, Computer Science, Cornell University Many Lights • Most techniques work for a single light source • Many light sources – For environment maps – For indirect illumination • Treat it is a single integration domain – Importance sample lights – Importance sampling (with visibility) still hard problem
Transcript of Lec15 ManyLights web - Cornell University · • HDR environment map – Apply captured light to...
![Page 1: Lec15 ManyLights web - Cornell University · • HDR environment map – Apply captured light to scene – Convert to directional point lights using [Agarwal et al. 2003] • Indirect](https://reader039.fdocuments.in/reader039/viewer/2022031511/5cc579f588c993ab2a8dd2ee/html5/page/1.jpg)
1
Lecture 15: Many Lights
CS 6620, Spring 2009Kavita Bala
Computer ScienceCornell University
© Kavita Bala, Computer Science, Cornell University
Many Lights• Most techniques work for a single light source
• Many light sources– For environment maps– For indirect illumination
• Treat it is a single integration domain– Importance sample lights– Importance sampling (with visibility) still hard problem
![Page 2: Lec15 ManyLights web - Cornell University · • HDR environment map – Apply captured light to scene – Convert to directional point lights using [Agarwal et al. 2003] • Indirect](https://reader039.fdocuments.in/reader039/viewer/2022031511/5cc579f588c993ab2a8dd2ee/html5/page/2.jpg)
2
© Kavita Bala, Computer Science, Cornell University
Research on many lights• Ward ‘91
• Shirley, Wang, Zimmerman ‘94
• Fernandez, Bala, Greenberg ’02– Donikian, Fernandez.. ‘06
• Lightcuts ‘05
© Kavita Bala, Computer Science, Cornell University
Shirley, Wang, Zimmerman ‘94• Try to avoid linear cost of evaluating lights• Separate lights into
– Set of important lights (a small set)– Set of “dim” lights (large set)
• Construct pdf using: – all important lights – 1 out of all the dim lights
• Importance sample these lights
![Page 3: Lec15 ManyLights web - Cornell University · • HDR environment map – Apply captured light to scene – Convert to directional point lights using [Agarwal et al. 2003] • Indirect](https://reader039.fdocuments.in/reader039/viewer/2022031511/5cc579f588c993ab2a8dd2ee/html5/page/3.jpg)
3
© Kavita Bala, Computer Science, Cornell University
Shirley, Wang, Zimmerman ‘94• Region of influence for important lights
– Octree cells in region of influence have light in important set
• However, the partitioning into important and dim sets remains hard
• Also, still are not taking visibility into account
© Kavita Bala, Computer Science, Cornell University
Lightcuts [SIGGRAPH ’05,’06] • Walter, Fernandez, Arbree, Bala• Efficient, accurate complex illumination
Environment map lighting & indirectTime 111s
Textured area lights & indirectTime 98s
(640x480, Anti-aliased, Glossy materials)
![Page 4: Lec15 ManyLights web - Cornell University · • HDR environment map – Apply captured light to scene – Convert to directional point lights using [Agarwal et al. 2003] • Indirect](https://reader039.fdocuments.in/reader039/viewer/2022031511/5cc579f588c993ab2a8dd2ee/html5/page/4.jpg)
4
© Kavita Bala, Computer Science, Cornell University
Scalable• Scalable solution for many point lights
– Thousands to millions– Sub-linear cost
0
100
200
300
400
500
600
0 1000 2000 3000 4000
Number of Point Lights
Tim
e (s
ecs)
StandardWardLightcut
Tableau Scene
© Kavita Bala, Computer Science, Cornell University
• Approach: unify illumination – Area lights– HDR environment maps– Sun & sky light– Indirect illumination
• Convert to point lights
GI as many-point lights
dlL(...)P = ∫+ )( directindirecthemisphere
Kitchen light: area, sun/sky, indirect
∑∈
=allLightsi
ii Ik
![Page 5: Lec15 ManyLights web - Cornell University · • HDR environment map – Apply captured light to scene – Convert to directional point lights using [Agarwal et al. 2003] • Indirect](https://reader039.fdocuments.in/reader039/viewer/2022031511/5cc579f588c993ab2a8dd2ee/html5/page/5.jpg)
5
© Kavita Bala, Computer Science, Cornell University
Convert Illumination• HDR environment map
– Apply captured light to scene – Convert to directional point lights
using [Agarwal et al. 2003]
• Indirect Illumination– Convert indirect to direct illumination
using Instant Radiosity [Keller 97]Caveats: no caustics, clamping, etc.
– More lights = more indirect detail
© Kavita Bala, Computer Science, Cornell University
Lightcuts Problem
Camera
![Page 6: Lec15 ManyLights web - Cornell University · • HDR environment map – Apply captured light to scene – Convert to directional point lights using [Agarwal et al. 2003] • Indirect](https://reader039.fdocuments.in/reader039/viewer/2022031511/5cc579f588c993ab2a8dd2ee/html5/page/6.jpg)
6
© Kavita Bala, Computer Science, Cornell University
Illumination Equation
Material term
result = Mi Gi Vi IiΣlights
Geometric term
Visibility term
Light intensity
Currently support diffuse, phong, and Ward
© Kavita Bala, Computer Science, Cornell University
Illumination Equation
Material term
result = Mi Gi Vi IiΣlights
Geometric term
Visibility term
Light intensity
![Page 7: Lec15 ManyLights web - Cornell University · • HDR environment map – Apply captured light to scene – Convert to directional point lights using [Agarwal et al. 2003] • Indirect](https://reader039.fdocuments.in/reader039/viewer/2022031511/5cc579f588c993ab2a8dd2ee/html5/page/7.jpg)
7
© Kavita Bala, Computer Science, Cornell University
Illumination Equation
Material term
result = Mi Gi Vi IiΣlights
Geometric term
Visibility term
Light intensity
© Kavita Bala, Computer Science, Cornell University
Key Concepts• Light Cluster
– Approximate many lights by a single brighter light (the representative light)
![Page 8: Lec15 ManyLights web - Cornell University · • HDR environment map – Apply captured light to scene – Convert to directional point lights using [Agarwal et al. 2003] • Indirect](https://reader039.fdocuments.in/reader039/viewer/2022031511/5cc579f588c993ab2a8dd2ee/html5/page/8.jpg)
8
© Kavita Bala, Computer Science, Cornell University
Key Concepts• Light Cluster• Light Tree
– Binary tree of lights and clusters
Clusters
IndividualLights
© Kavita Bala, Computer Science, Cornell University
Key Concepts• Light Cluster• Light Tree• A Cut
– A set of nodes that partitions the lights into clusters
![Page 9: Lec15 ManyLights web - Cornell University · • HDR environment map – Apply captured light to scene – Convert to directional point lights using [Agarwal et al. 2003] • Indirect](https://reader039.fdocuments.in/reader039/viewer/2022031511/5cc579f588c993ab2a8dd2ee/html5/page/9.jpg)
9
© Kavita Bala, Computer Science, Cornell University
Simple Example
#1 #2 #3 #4
1 2 3 4
1 4
Light Tree
Clusters
IndividualLights
RepresentativeLight
4
© Kavita Bala, Computer Science, Cornell University
Three Example Cuts
1 2 3 4
1 4
4
1 2 3 4
1 4
4
1 2 3 4
1 4
4
Three Cuts
#1 #2 #4 #1 #3 #4 #1 #4
![Page 10: Lec15 ManyLights web - Cornell University · • HDR environment map – Apply captured light to scene – Convert to directional point lights using [Agarwal et al. 2003] • Indirect](https://reader039.fdocuments.in/reader039/viewer/2022031511/5cc579f588c993ab2a8dd2ee/html5/page/10.jpg)
10
© Kavita Bala, Computer Science, Cornell University
Three Example Cuts
1 2 3 4
1 4
4
1 2 3 4
1 4
4
1 2 3 4
1 4
4
Three Cuts
#1 #2 #4 #1 #3 #4 #1 #4
Good Bad Bad
© Kavita Bala, Computer Science, Cornell University
Three Example Cuts
1 2 3 4
1 4
4
1 2 3 4
1 4
4
1 2 3 4
1 4
4
Three Cuts
#1 #2 #4 #1 #3 #4 #1 #4
Bad Good Bad
![Page 11: Lec15 ManyLights web - Cornell University · • HDR environment map – Apply captured light to scene – Convert to directional point lights using [Agarwal et al. 2003] • Indirect](https://reader039.fdocuments.in/reader039/viewer/2022031511/5cc579f588c993ab2a8dd2ee/html5/page/11.jpg)
11
© Kavita Bala, Computer Science, Cornell University
Three Example Cuts
1 2 3 4
1 4
4
1 2 3 4
1 4
4
1 2 3 4
1 4
4
Three Cuts
#1 #2 #4 #1 #3 #4 #1 #4
Good Good Good
© Kavita Bala, Computer Science, Cornell University
Algorithm Overview• Pre-process
– Convert illumination to point lights– Build light tree
• For each eye ray– Choose a cut to approximate the illumination
![Page 12: Lec15 ManyLights web - Cornell University · • HDR environment map – Apply captured light to scene – Convert to directional point lights using [Agarwal et al. 2003] • Indirect](https://reader039.fdocuments.in/reader039/viewer/2022031511/5cc579f588c993ab2a8dd2ee/html5/page/12.jpg)
12
© Kavita Bala, Computer Science, Cornell University
Algorithm Overview• Pre-process
– Convert illumination to point lights– Build light tree
• For each eye ray– Choose a cut to approximate the local
illuminationCost vs. accuracyAvoid visible transition artifacts
© Kavita Bala, Computer Science, Cornell University
Threshold visibility
LL
ΔΔLL
L+ΔLL
ΔΔL = L = kLkL WeberWeber’’s laws law
TVI functionsTVI functions
![Page 13: Lec15 ManyLights web - Cornell University · • HDR environment map – Apply captured light to scene – Convert to directional point lights using [Agarwal et al. 2003] • Indirect](https://reader039.fdocuments.in/reader039/viewer/2022031511/5cc579f588c993ab2a8dd2ee/html5/page/13.jpg)
13
© Kavita Bala, Computer Science, Cornell University
Perceptual Metric• Weber’s Law
– Contrast visibility threshold is fixed percentage of signal
– Used 2% in our results
• Ensure each cluster’s error < visibility threshold– Transitions will not be visible– Used to select cut
© Kavita Bala, Computer Science, Cornell University
Cluster Approximation
Cluster
result ~ Mj Gj Vj IiΣlights
~
j is the representative light
![Page 14: Lec15 ManyLights web - Cornell University · • HDR environment map – Apply captured light to scene – Convert to directional point lights using [Agarwal et al. 2003] • Indirect](https://reader039.fdocuments.in/reader039/viewer/2022031511/5cc579f588c993ab2a8dd2ee/html5/page/14.jpg)
14
© Kavita Bala, Computer Science, Cornell University
error < Mub Gub Vub Ii
Cluster Error Bound
Cluster
Σlights−
• Bound each term– Visibility <= 1 (trivial)– Intensity is known– Bound material and
geometric terms using cluster bounding volume
ub == upper bound
© Kavita Bala, Computer Science, Cornell University
Cut Selection Algorithm
Cut
• Start with coarse cut (eg, root node)
![Page 15: Lec15 ManyLights web - Cornell University · • HDR environment map – Apply captured light to scene – Convert to directional point lights using [Agarwal et al. 2003] • Indirect](https://reader039.fdocuments.in/reader039/viewer/2022031511/5cc579f588c993ab2a8dd2ee/html5/page/15.jpg)
15
© Kavita Bala, Computer Science, Cornell University
Cut Selection Algorithm
Cut
• Select cluster with largest error bound
© Kavita Bala, Computer Science, Cornell University
Cut Selection Algorithm
Cut
• Refine if error bound > 2% of total
![Page 16: Lec15 ManyLights web - Cornell University · • HDR environment map – Apply captured light to scene – Convert to directional point lights using [Agarwal et al. 2003] • Indirect](https://reader039.fdocuments.in/reader039/viewer/2022031511/5cc579f588c993ab2a8dd2ee/html5/page/16.jpg)
16
© Kavita Bala, Computer Science, Cornell University
Cut Selection Algorithm
Cut
© Kavita Bala, Computer Science, Cornell University
Cut Selection Algorithm
Cut
![Page 17: Lec15 ManyLights web - Cornell University · • HDR environment map – Apply captured light to scene – Convert to directional point lights using [Agarwal et al. 2003] • Indirect](https://reader039.fdocuments.in/reader039/viewer/2022031511/5cc579f588c993ab2a8dd2ee/html5/page/17.jpg)
17
© Kavita Bala, Computer Science, Cornell University
Cut Selection Algorithm
Cut
© Kavita Bala, Computer Science, Cornell University
Cut Selection Algorithm
Cut
• Repeat until cut obeys 2% threshold
![Page 18: Lec15 ManyLights web - Cornell University · • HDR environment map – Apply captured light to scene – Convert to directional point lights using [Agarwal et al. 2003] • Indirect](https://reader039.fdocuments.in/reader039/viewer/2022031511/5cc579f588c993ab2a8dd2ee/html5/page/18.jpg)
18
© Kavita Bala, Computer Science, Cornell University
Lightcuts (128s) Reference (1096s)
Error Error x16
Kitchen, 388K polygons, 4608 lights (72 area sources)
© Kavita Bala, Computer Science, Cornell UniversityKitchen, 388K polygons, 59,672 Lights
![Page 19: Lec15 ManyLights web - Cornell University · • HDR environment map – Apply captured light to scene – Convert to directional point lights using [Agarwal et al. 2003] • Indirect](https://reader039.fdocuments.in/reader039/viewer/2022031511/5cc579f588c993ab2a8dd2ee/html5/page/19.jpg)
19
© Kavita Bala, Computer Science, Cornell UniversityKitchen, shadow ray false color
0 750 1500
© Kavita Bala, Computer Science, Cornell University
Combined Illumination
Lightcuts 128s
4 608 Lights(Area lights only)
Avg. 259 shadow rays / pixel
Lightcuts 290s
59 672 Lights(Area + Sun/sky + Indirect)
Avg. 478 shadow rays / pixel(only 54 to area lights)
![Page 20: Lec15 ManyLights web - Cornell University · • HDR environment map – Apply captured light to scene – Convert to directional point lights using [Agarwal et al. 2003] • Indirect](https://reader039.fdocuments.in/reader039/viewer/2022031511/5cc579f588c993ab2a8dd2ee/html5/page/20.jpg)
20
© Kavita Bala, Computer Science, Cornell University
Grand Central, 1.46M polygons, 143464 lights, (Area+Sun/sky+Indirect)Avg. shadow rays per eye ray 46 (0.03%)
© Kavita Bala, Computer Science, Cornell University
Tableau, 630K polygons, 13000 lights, (EnvMap+Indirect)Avg. shadow rays per eye ray 17 (0.13%)
![Page 21: Lec15 ManyLights web - Cornell University · • HDR environment map – Apply captured light to scene – Convert to directional point lights using [Agarwal et al. 2003] • Indirect](https://reader039.fdocuments.in/reader039/viewer/2022031511/5cc579f588c993ab2a8dd2ee/html5/page/21.jpg)
21
© Kavita Bala, Computer Science, Cornell University
Bigscreen, 628K polygons, 639528 lights, (Area+Indirect)Avg. shadow rays per eye ray 17 (0.003%)
© Kavita Bala, Computer Science, Cornell University
∫eslightSourc
Problem: Many Lights and GI
dlL(...)
eye
P =
P
Many Lights + env map
Grand Central Station
∫+ )( directindirecthemisphere
Kalabsha temple
Indirect Illumination + sun/sky
![Page 22: Lec15 ManyLights web - Cornell University · • HDR environment map – Apply captured light to scene – Convert to directional point lights using [Agarwal et al. 2003] • Indirect](https://reader039.fdocuments.in/reader039/viewer/2022031511/5cc579f588c993ab2a8dd2ee/html5/page/22.jpg)
22
© Kavita Bala, Computer Science, Cornell University
AA, Volumetric, Motion Blur, DOF
Pixel = ∫ ∫pixelArea hemisphere
L(...)
Motion Blur
pixel
eye
∫time
∫aperture
Depth-of-Field
∫volume
Volumetric: Fog
eye
pixel
© Kavita Bala, Computer Science, Cornell University
Kalabsha temple, Egypt
How to scale to complexity?
If you can’t see it, don’t compute it
![Page 23: Lec15 ManyLights web - Cornell University · • HDR environment map – Apply captured light to scene – Convert to directional point lights using [Agarwal et al. 2003] • Indirect](https://reader039.fdocuments.in/reader039/viewer/2022031511/5cc579f588c993ab2a8dd2ee/html5/page/23.jpg)
23
© Kavita Bala, Computer Science, Cornell University
More is Lesscomplexity visually salient
© Kavita Bala, Computer Science, Cornell University
Direct+Indirect (1.3x)Direct only (relative cost 1x)Direct+Indirect+Fog (1.8x) Direct+Indirect+Fog+Motion (2.2x)
More is Less
![Page 24: Lec15 ManyLights web - Cornell University · • HDR environment map – Apply captured light to scene – Convert to directional point lights using [Agarwal et al. 2003] • Indirect](https://reader039.fdocuments.in/reader039/viewer/2022031511/5cc579f588c993ab2a8dd2ee/html5/page/24.jpg)
24
© Kavita Bala, Computer Science, Cornell University
eye
• Discretize full integral into 2 point sets– Light points (L)– Gather points (G)
Pixel
Gather pointst = 0.34
t = 0.81
Light points
Multidimensional LC[SIG’06]Pixel = ∫ ∫
pixelArea hemisphere
L(...)∫time
∫aperture
∫volume
© Kavita Bala, Computer Science, Cornell University
• Sum of all pairs of gather and light points
Multidimensional problem
Light points
Gather points
Σ Weight of ray
Light intensity
Gather strength
Pixel = Sj kji Ii( j,i)∈GxL
0
100
200
300
400
500
600
0 1000 2000 3000 4000
Number of Point Lights
Tim
e (s
ecs)
StandardWardLightcut
![Page 25: Lec15 ManyLights web - Cornell University · • HDR environment map – Apply captured light to scene – Convert to directional point lights using [Agarwal et al. 2003] • Indirect](https://reader039.fdocuments.in/reader039/viewer/2022031511/5cc579f588c993ab2a8dd2ee/html5/page/25.jpg)
25
© Kavita Bala, Computer Science, Cornell University
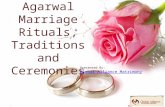
Product Graph• Explicit hierarchy would be too expensive• Use implicit hierarchy: product graph
Light tree
Gather tree
L0 L1 L2 L3
L4 L5
L6
G1G0
G2
L0L1 L2 L3
G0
G1 X
eye
© Kavita Bala, Computer Science, Cornell University
Product Graph
Light tree
Gather tree
X =L0 L1 L2 L3
L4 L5
L6
G1G0
G2
Cartesian product of two trees (gather & light)
Refine “cut” until perceptual thresholdGeneralize cut, representative, error bounds
L1 L2 L3L4 L5L6L0
G1
G0
G2
![Page 26: Lec15 ManyLights web - Cornell University · • HDR environment map – Apply captured light to scene – Convert to directional point lights using [Agarwal et al. 2003] • Indirect](https://reader039.fdocuments.in/reader039/viewer/2022031511/5cc579f588c993ab2a8dd2ee/html5/page/26.jpg)
26
© Kavita Bala, Computer Science, Cornell University
Product Graph
Light tree
Gather tree
X =L0 L1 L2 L3
L4 L5
L6
G1G0
G2
Refine “cut” until perceptual thresholdGeneralize cut, representative, error bounds
L1 L2 L3L4 L5L6L0
G1
G0
G2
L5L4
G2
© Kavita Bala, Computer Science, Cornell University
Summary• Unified illumination handling• Scalable solution for many lights
– Locally adaptive representation (the cut)• Perceptual visibility metric
0
100
200
300
400
500
600
0 1000 2000 3000 4000
Number of Point Lights
Tim
e (s
ecs)
StandardWardLightcut