Jan Neumann - WUR
73
I Centre for Geo-Information Thesis Report GIRS-2015-24 The meaning of resident’s opinions for spatial decision making An agent-based simulation of continuous opinion dynamics under consideration of social and spatial influence Jan Neumann April 12 th 2015
Transcript of Jan Neumann - WUR

I
Centre for Geo-Information
Thesis Report GIRS-2015-24
The meaning of resident’s opinions for spatial decision making
An agent-based simulation of continuous opinion dynamics under consideration of social and spatial influence
Jan Neumann
April 1
2th 2
015

II

III

IV
The meaning of resident’s opinion for spatial decision making
An agent-based simulation of continuous opinion dynamics under consideration of social
and spatial influence
Jan Neumann
Registration number 810306-599-050
Supervisor:
Dr. Ir. Arend Ligtenberg
A thesis submitted in partial fulfilment of the degree of Master of Science
at Wageningen University and Research Centre,
The Netherlands.
April 12th
2015
Wageningen, The Netherlands
Thesis code number: GRS-80436
Thesis Report: GIRS-2015-24
Wageningen University and Research Centre
Laboratory of Geo-Information Science and Remote Sensing

V
Acknowledgements
Almost eight years ago I made after all the decision against my old occupation and for a start
from scratch by second-chance education. Now, I have almost reached the goal. After a
bachelor in spatial planning this research topic was an interesting interface between geo-
information science and my previous studies.
I appreciated the challenging process and the associated responsibility against myself.
However, in some places the frustration grew big and I want to give thanks to my supervisor
Arend Ligtenberg for giving me back my night-time peace while struggling with NetLogo
table structures. Further, he always had a friendly ear and supplied me with new thought-
provoking impulses during our meeting. Thank you for that, Arend! Also, very special thanks
to my fellow students for social activities, coffee breaks, and dice games during lunch.
In addition I would like to thank both, the German government of Willy Brandt that
established the BAföG in the 1970’s as well as my old colleagues, friends, and employers
Marian and Basti. Without them, I would have barely been able to finance my studies during
the last years.
Further, I want to thank my parents and my sister for support, open ears, and the advice
during the last years. This is not taken for granted and I really appreciate it. Last but definitely
not least, thank you Milena for distraction, good advice, and yourself by my side.

VI
Table of content
ACKNOWLEDGEMENTS .................................................................................................................................. V
LIST OF FIGURES ...........................................................................................................................................VII
LIST OF TABLES ........................................................................................................................................... VIII
SUMMARY ......................................................................................................................................................... IX
1 INTRODUCTION.......................................................................................................................................... 1
1.1 PROBLEM DEFINITION ......................................................................................................................... 2 1.2 RESEARCH OBJECTIVE AND RESEARCH QUESTION ............................................................................... 3 1.3 STRUCTURE ......................................................................................................................................... 4
2 THEORETICAL BACKGROUND .............................................................................................................. 5
2.1 SPATIAL PLANNING ........................................................................................................................... 5 2.2 COMPLEX ADAPTIVE SYSTEMS .......................................................................................................... 8 2.3 MULTI-AGENT SYSTEMS (MAS) AND AGENT-BASED MODELS (ABM) ............................................. 9 2.4 OPINION FORMATION ...................................................................................................................... 12 2.5 OPINION DYNAMICS ......................................................................................................................... 16 2.6 CONCLUSION ................................................................................................................................... 21
3 CONCEPTUAL APPROACH .....................................................................................................................23
3.1 A SUITABLE MODEL ......................................................................................................................... 23 3.2 CONCEPTUAL MODEL ...................................................................................................................... 25 3.3 DESCRIPTION OF THE MODEL .......................................................................................................... 27
4 RESULTS ......................................................................................................................................................36
4.1 CASE STUDY .................................................................................................................................... 36 4.2 SCENARIOS ...................................................................................................................................... 39 4.3 OPINION DISTRIBUTION.................................................................................................................... 46
5 DISCUSSION AND CONCLUSIONS ........................................................................................................50
5.1 DISCUSSION ..................................................................................................................................... 50 5.2 CONCLUSION ................................................................................................................................... 54
REFERENCES .....................................................................................................................................................57
APPENDIX ...........................................................................................................................................................62

VII
List of figures
Figure 1: Theoretical background………………………………………...................... 6
Figure 2: Intentional model of actor based decision making (based on Ligtenberg)… 24
Figure 3: Conceptual approach……………………………………………………….. 26
Figure 4: ODD approach according to Grimm et al. (2006) ………………………….. 28
Figure 5: Iteration procedure per agent adapted from the model of Ligtenberg and Bregt
(2014)…………………………………………………………………………………… 30
Figure 6: Representation of actor communication. With increasing spatial distance
interaction decreases between locations. With increasing social distance
interaction decreases between agents……………………………………….. 33
Figure 7: Case study area in the Northern part of Wijchen/ the Netherlands………… 36
Figure 8: The case-study area as displayed in Google Earth………………………….. 36
Figure 9: Simulation results of scenario a……………………………………………... 40
Figure 10: Simulation results of scenario b……………………………………………. 42
Figure 11: Simulation results of scenario c………………………………………….… 41
Figure 12: Distribution of all opinions after 20 interactions (ticks)…………………... 46
Figure 13: Opinion distribution after different amount of interaction………………… 49

VIII
List of tables
Table 1: Comparison of continuous OD model approaches…………………………… 25
Table 2: Entities, variables, and scales of the simulation model………………………. 29
Table 3: Parameters, variables, and default values for the scenario case study on Dutch 45
Table 4: Scenario a - values of average opinion under various thresholds…………….. 41
Table 5: Scenario a - values of average opinion under various thresholds…………….. 41
Table 6: Scenario b - values of average opinion under various thresholds…………….. 43
Table 7: Scenario b - values of average opinion under various thresholds…………….. 43
Table 8: Scenario c - values of average opinion under various thresholds…………….. 45
Table 9: Scenario c - values of average opinion under various thresholds…………….. 45
Table 10: Statistical outcome for all scenarios after 20 rounds of interaction…………. 47
Table 11: Statistical outcome after different rounds of interaction…………………….. 48

IX
Summary
This research deals with the implementation of the dynamics of opinions in a planning related
agent-based model environment. The problem of current planning models is the ignoring of
opinions as influencing factor on decision. Controversially however, current existing models
for the simulation of opinion dynamics are ignoring a spatial component which is important
for spatial planning models. Adding both, a spatial and social component to an dynamic
model environment seemed a sensible approach to overcome this problem and to simulate
opinions dynamics and learning capacity of agents. Therefore, it is investigated how the
current role of opinions in multi-actor spatial planning could be simulated within an agent-
based model environment and what this would add to our current understanding of dynamics
in spatial planning. Literature review, conceptual model, ODD-protocol, and the
implementation of the model on a certain case are methods that were used to answer the
questions of this research. The results of the case study show, that multi-actor spatial
planning’s models should consider a spatial component since it is an important influencing
factor on the opinion of actors which are involved in decision making processes. The model
could be used to highlight locations that are more or less conflicting according to actor’s
opinions. Further, the model results showed adaptive-behaviour of actor’s opinions. The
validation of the model results, however, remains problematic. A limited amount of
components, the restriction to only several rules, and the absence of “reals” argumentation
capacity provides model results that are far from a realistic outcome and therefore, hard to
validate

1
1 Introduction
“The real decision making process involves a lot of people, and the whole structure is
redolent with feedback. At every decisive moment, of which there will be great many
within the total decision, we range ahead and back and sideways. We gauge the effect of
this sub-decision on everything we have tentatively decided already, and on the sub-
decisions left to take. This is why I think the decision tree is an artefact, and of little use
to us. You cannot isolate these nodes either in time or in logical connectivity, and anyone
who has ever taken a complicated decision knows this.” (Beer, 1975)
Spatial planning deals with changing organization of the spatial environment in order to
satisfy the claims of a society (Van der Valk, 2002). The spatial development of the
environment requires spatial interaction (Klepinger, 2007) and takes “study of psychology,
logistics, economics, and sociology of individual and group decision-making processes”
(Ligtenberg, Wachowicz, Bregt, Beulens, & Kettenis, 2004). Within the last few decades,
spatial planning has shifted from top-down to a rather bottom-up approach. Nowadays, local
governments are no longer the primary actors and sole decision makers. They rather play one
role among others or assume the role as an observer (Wegener, 2004). Their shifting role
requires the ability to anticipate likely future plans of relevant private actors. Therefore, it is
necessary that local governments understand interests and motivations of their actions
(Wegener, 2004). About an increased amount of actors within the spatial environment,
competition for the same resource occurs more frequently (Ligtenberg et al., 2004) and
planners need to deal with increased complexity (Ligtenberg et al., 2004) to understand
dynamic spatial processes.
Since computational power has been rigorously increased in the last decades, computers
nowadays play the major role in “acting as a simulator for physical processes” (Holland,
1992). Humans form networks in their spatial environment by a social interaction. Agent-
based Models (ABMs) provide the opportunity to reproduce systems with a network structure
(Billari, 2006) and to forecast and explore future scenarios (Axelrod, 1997). However,
Ligmann-Zielinska and Jankowski (2007) mention that “using ABMs for spatially explicit
modelling of real world policy scenarios” has been limited to few activities. ABMs make use
of a multi-actor modelling approach. Since complex and dynamic spatial processes are non-
linear in their outcome, ABMs allow the simulation of alternatives, by assigning new values
to decision variables (Axelrod, 1997). An actor or a group of actors in the real world refers to
an agent within an ABM.
As computational decision making is limited to pre-written codes, and a priori knowledge
(Ligtenberg et al., 2004), it is necessary to understand how both, opinions and decisions of
social actors, are formed and changed. This is important to understand and deal with the
complexity of those social processes. Opinions and beliefs are driving forces in shaping social
interactions. Social interaction leads in an society to social learning and the formation of
different opinions (Acemoglu & Ozdaglar, 2011). Opinion forming is a dynamic process,
which also is true for spatial decision making. For ‘continuous opinions’, different models

2
(Sznajd, Deffuant, Hegselmann-Krause) have been developed (Martins, 2008). It needs to be
considered that the assigning of dynamic opinions to distinct variables entails in a model shift
from linear to non-linear behaviour (Hegselmann & Krause, 2002). However, this leads to a
lack of validity in the model results.
Modelling of complex and dynamic systems should be approached in a simple and systematic
way (Hegselmann & Krause, 2002) and by reducing the complexity of the model (Ligtenberg
et al., 2004). The assumptions that “people construct their own realities” and that “experience
and behaviour is influenced by social relationships” (Smith & Guthrie, 1921), shows, that
sociological factors in opinion forming are highly complex. Here, the ABMs should be able to
represent this complexity in a simple way and not too complicated way. To do so, it is
important to gain adequate knowledge about decision making processes and to apply this
knowledge for the implementation of ABMs for complex spatial dynamics.
1.1 Problem definition
ABMs for the simulation of relevant issues in spatial planning received progressively more
attention during the last years. Decision making processes are often organized through
different interest groups (Faludi, 1973), which are vicarious for different agents within an
ABM. Yet, little is known about beliefs and preferences in the decision making of certain
agents (Ligtenberg et al., 2004).
One important domain of decision making processes refers to the field of opinion formation.
Opinion formation refers to the scientific field of social-psychology. An opinion describes the
“degree of preference” an agents has towards particular items or occurrences (Kaur, Kumar,
Bhondekar, & Kapur, 2013). It needs to be considered that opinion formation is an
evolutionary process and that it is influenced by “real or imagined presence of others" within
social networks (Nowak, Szamrej, & Latané, 1990). These dynamics and the formation of
opinions have received exceptional high attention in the study of social physics (Kaur et al.,
2013).
Continuous models for opinion dynamics consider that existing opinions of agents can be
changed by the influence of others (Stauffer, 2005). However, these models follow the
assumption of bounded confidence, which assumes a similar opinion among agents before
they interact with each other (Hegselmann & Krause, 2002; Sznajd-Weron & Sznajd, 2000).
This implies that opinions can only be simulated towards the boundaries that are given within
the source code of the model. Here, the interaction between agents is determined by present
threshold values. (Kaur et al., 2013).
Due to the constrain of pre-determined boundaries in these models, agents are limited to
evolve collective intelligence by social influence (Kaur et al., 2013). The issue that opinions
take continuous values in an interval, rather than binary states (‘pro’ or ‘contra’) has been
solved by an convergence parameter in the model of Deffuant, Neau, Amblard, and Weisbuch
(2000). Another issue is the circumstance that opinion formation “resembles a process where
consensus is reached by continuous influence from each other”(Kaur et al., 2013). However,

3
theories about understanding opinion dynamics in social networks do not yet provide a
consensus among researchers (Mäs, Flache, & Helbing, 2010).
Ligtenberg and Bregt (2014) describe that “for most spatial problems the opinion space can
be considered multi-dimensional as the opinion dynamics not only depend on time but also its
location within a 2 dimensional geographic space”. However, for spatial planning purposes
the use of current models on opinion dynamics remains problematic, since they do not take
the spatial influence of an opinion into account. Most spatial ABMs do not represent the
diffusion and distribution of opinions (Ligtenberg & Bregt, 2014). It needs to be considered
that heterogeneity of an opinion is not only depending on the agent population, but also on
space and therefore requires an additional dimension for location.
Therefore, modelling opinions of complex spatial dynamics faces limitations when it comes to
validation (Engelen & White, 2008). Particularly, the validation of socio-spatial systems, to
which ABM based spatial planning belongs to (Ligtenberg, Beulens, Kettenis, Bregt, &
Wachowicz, 2009), is difficult since they often do not have a reference situation (Windrum,
Fagiolo, & Moneta, 2007).
This rests upon the case, that, firstly, only limited actor communication and opinions can be
included within a model and, secondly, that beliefs and preferences are only available in rule
form (Ligtenberg et al., 2004). As described earlier, equations about preferences and opinions
are based on a priori knowledge. Therefore, it is desirable to gain more knowledge about
crucial points in opinion formation. Here, the focus should lay on influencing factors that play
a role in spatial decision making (NIMBY, size, location, duration, costs et cetera). This might
help in better reasoning about certain agent decisions and to increase the validation of spatial
planning based ABMs.
It needs to be considered that models are only simplifications of reality. Often models are not
applicable to the real world. They rather help us to learn from their outcomes instead of
predicting the future. This enables us in learning from the results in order to develop better
theory and methods. Spatial models are often considered as being data intense, cross-
disciplinary as well as both dynamic and complex (Couclelis, 2002)
1.2 Research objective and research question
Based on this knowledge gap, my thesis focusses on opinion dynamics that play a role for the
implementation of ABMs of complex dynamics in spatial decision making. The overall
objective of this research is (i) to gain more knowledge on opinion formation processes, (ii) to
transform this knowledge into a set of equations, and (iii) to implement these set of equations
within a computer based modelling environment. For the modelling process an existing model
approach was used and extended by a constructed set of equations. Four research questions
(RQ) were formulated to achieve the objectives during my thesis research.

4
RQ 1: What is the current role of opinions in multi-actor spatial planning?
RQ 2: How can opinion formation and dynamics are formalized into a logical set of
equations?
RQ 3: How can these set of equations be simulated in an agent-based model?
RQ4: What does this approach add to the current understanding of the land use/ planning
dynamics?
1.3 Structure
The structure of this thesis report answers the research questions in consecutive order. The
first research question is answered in chapter 2 by a literature review to highlight the state-of-
the-art and to avoid overlap during my research. Therefore, the five different subjects spatial
planning, complex adaptive systems, agent-based models, opinion formation and opinion
dynamics are investigated and described according to their usability according to the research
objectives.
The second and third research questions are answered in the methodology part of chapter 3.
First, different models of opinion dynamics are compared and the most suitable to the purpose
is chosen. After that the conceptual model describes aspects and approaches that were
considered in order to bring real world circumstances into a model environment.
Subsequently, all model steps are described in detail by using the approach of the ODD-
Protocol by Grimm (2010) and a formalised set of equations. Eventually, decisions and
formalised equations from the conceptual approach are implemented in in a simulation model
for a Dutch planning case for a specific four digit postcode area.
The results of the simulation model are used to answer the last research question. To answer
the question a comparison is done, in how far the results are corresponding to the findings of
the first research question. All research questions are summarized and critically assessed in
the subsequent discussion, which ends in a conclusion and recommendations for further
research.

5
2 Theoretical background
Five different subjects were of relevance for this study. To ensure that the research had no
repeating overlap with existing knowledge the state-of-the-art was investigated. Figure 1
gives an overview over the theoretical background and demonstrates the five investigated
subjects spatial planning (SP), complex adaptive systems (CAS), agent-based models (ABM),
opinion formation (OF), and opinion dynamics (OD) under the appropriate section number in
this report.
Fig. 1: Theoretical background
2.1 Spatial Planning
Spatial planning is described as a highly complex activity (Geertman, 2006) for solving
existing and anticipating future societal problems (Vonk, 2006). To satisfy the claims of a
society (Van der Valk, 2002), relations among social actors need to be based on a societal set
of rules, norms and values (Kleefmann, 1984). According to Kleefmann (1984), common
societal acting assumes that spatial and societal sub-systems are necessarily woven together.
From the 1950’s on the role of spatial planning has shifted via different stages from a
‘rationality tradition’ of blueprint planning to ‘participatory tradition’ of participatory and
communicative planning (Geertman, 2006). This shift is related to distrust against experts and
regulators, since they were not be assumed to be able to mitigate unknowable and unavoidable
social risks (Laurian, 2009) due to planning decisions. This shift from authority-based spatial
planning to rather participatory approach (Ligtenberg et al., 2004) assumes that short term
solutions are no longer satisfactory as it comes to decisions of high collective interests (Vonk,
2006).
Recent literature describes a shift in spatial planning from a linear to continuous and
multifaceted process (Ligtenberg & Bregt, 2014). In the course of time, planning processes
have become more diverse (Wegener, 2001). Since nowadays more actors are participating in
the planning process and following their own motives and interests, it is crucial to understand
both, what and why something is going on as well as to predict probable futures (Wegener,
2001). Geertman (2006), described three main reasons for growing complexity due to
increased participation in planning processes, namely:

6
An increased number of fields of policy that needs to be taken into account and
integrated
A growing amount of actors with divergent interest and agendas
The involvement of participants takes place at a much earlier stage in the planning
process
Therefore, it is important to understand that actors are guided by different intentions, different
strategies and different perception of space (Samsura, van der Krabben, & Van Deemen,
2010). Complexity due to participatory planning causes that, modern spatial planning strives
to “satisfies the needs of the community of actors as a whole” (Ligtenberg & Bregt, 2014).
Current spatial planning models tend to favour a methodological approach, depending on their
purpose. te Brömmelstroet and Bertolini (2008), for instance describe a rather quantitative
information approach in transport planning, while land-use planners make preferably use of
both quantitative spatial information as well as social sciences and the approach is
predominantly based on communication and deliberative rationality (Forester, 1999).
Wegener (2001), defines a model as a simplified representation of an object for purposes of
description, explanation, forecasting or planning, which state might be of single, bi-space
(spatial model), or tri-space (space-time model). He divides spatial planning models into five
different groups:
Economic modelling: Includes models of urban land as well as housing and
determines the optimum locations for placing an object. The model approach is based
on location theory
Geographical modelling: Includes migration models based on notions of distance and
dissimilarity. Couples with probabilistic models of population dynamics, spatial
interaction and location models.
Sociological modelling: Includes models of spatial segregation based ‘social ecology’
and models of urban ‘action spaces’.
Transport engineering modelling: Includes travel and good transport models based on
entropy or random utility theory.
Integrated modelling: Combines two or more above-specialised models
Regarding the increased complexity, planning processes require models of inclusive
strategies, that are capable in bringing together multiple goals of multiple disciplines (Zapatha
& Hopkins, 2007). Therefore, context and user requirements as well as the adaption of
planners need to be considered for the implementation of a model that suits the purpose
(Geertman, 2006; Vonk, 2006)
Ligtenberg (2006), described spatial planning as decision making process among different
actors. This multi-actor decision making is based on the perception of the spatial environment
as it is formed by emotions, senses, brains and communication (Ligtenberg, 2006). This
makes spatial planning a complex process (Samsura et al., 2010). Geertman (2006), describes
participation and collaboration as crucial elements of current spatial planning, that stresses
partnerships among all participants as well as the multidimensionality of problems and

7
solutions. This so called ‘communicative planning’ is based on the theory of Habermas (1987)
about communicative action, in which he stresses a dialogical and public discourse. These
deliberative processes are essential to build up trust (Senecah, 2004), which is described as a
social construct that characterizes human relations (Seligman, 2000). Rousseau, Sitkin, Burt,
and Camerer (1998), define trust as:
“A psychological state of mind comprising the intention to accept vulnerability based
upon positive expectations of the intentions or behaviour of another”
Building up trust can be seen as an important issue for planning in order to deal with
phenomena like the ‘Not In My Back Yard’ (NIMBY) syndrome, as it comes to siting
decisions about unwanted facilities and/or objects (Dear, 1992). Since planning combines
both, public and private interests, trust is an essential element in order to encourage
participation for spatial decision making (Laurian, 2009). Further, trust is seen as prerequisite
for cooperation and the interaction between opinions of people among different groups of
interest (Brockner, 1996). Planning processes that are based on trust are legitimate, since
decisions are compromises made in the name of the common good (Tilly, 2005), even though
disagreements in values, interest and power relations can never be fully dissolved (Laurian,
2009). In order to reach the most legitimate results, Laurian (2009) refers to the necessity of
ongoing “communication, learning and understanding of issues as well as attention to views,
values and goals of others” for deliberative planning processes.
Since planning processes involve several stakeholders, spatial decision making is often
confronted with conflicts, which can be distinguished into conflict of interests and conflict of
values or belief (Aubert, 1963). To solve this conflicts it is intended to minimize losses for all
sites (Aubert, 1963) by compromising. Therefore, deliberative processes like dialogue,
consensus building et cetera are important for spatial decision making in order to improve the
quality of decision and to legitimate them (Laurian, 2009).
Consensus building is valuable for decision making processes since it helps in finding new
feasible strategies for complex planning tasks by producing new relationships, new practices,
and new ideas (Innes & Booher, 1999). This enables planners to deal better with issues of
“uncertainty, loss of meaning, and rapid changes in contemporary society” (Innes & Booher,
1999).
The increased meaning of computers led to the innovation of “Planning Support Systems”
(PSS) for spatial decision making. However, te Brömmelstroet and Bertolini (2008), argued
that current models were failing in representing large parts of complexity since they were
often not easy understandable to planners. Three main weaknesses of current PSS were
identified by Vonk (2006):
Planners usage remains limited to rather simple and un-complex tasks
Limited usage by executives in decision making
Little use of PSS made by citizens and professional stakeholders

8
As described spatial planning faces complex processes in a complex system. Decision making
in these processes is based on interdependencies of its actors. Therefore, Ligtenberg (2006)
describes spatial planning as a complex adaptive system (CAS).
2.2 Complex Adaptive Systems
Processes in CAS imply that much can emerge from little (Holland, 1992). These processes
are without a central control and are rather driven by many, interacting parts (Holland,
1992).This means that “simple elements are governed by a few simple rules and operate
through trial and error with interaction and feedback” (Innes & Booher, 1999). A
precondition for CAS is an unstable environment, which is not entirely chaotic. This results in
still productive patterns that can be found (Innes & Booher, 1999). Manipulation or
suppression of individual views in CAS weakens the intelligence of the system, since CAS
depend on autonomous acting of its individuals. (Innes & Booher, 1999). Holland (2006)
argues that in a CAS, multiple processes are taking place simultaneously (parallelism),
processes are depending on each other (conditionality) , components are coupled differently at
different level (modularity), and that there are changes over time (adaption and evolution).
Ligtenberg (2006) describes processes in spatial planning as CAS since they are both,
complex as well as interdependent. CAS specific features of CAS as they are described in
Grus, Crompvoets, and Bregt (2010) can be recognised for decision making processes in
spatial planning. For instance, spatial planning processes are embedded in mutual interaction
between different components (Rotmans, 2005) that take place simultaneously (Cilliers,
2005). This interaction faces continuous change for both, the physical environment as well as
the social reality of actors. Small actions in the planning process may have a major effect in
the future (Grus et al., 2010). CAS specific interaction with the environment and sensitivity to
external influences (Rotmans, 2005) are also applicable in spatial planning processes.
Described unpredictability of CASs about the final system behaviour as well as the fractal
building (Grus et al., 2010) is also appropriate in spatial decision making.
Planning processes are interconnected by many influencing factors, which can be related to
the properties of conditionality and modularity as described in Holland (2006). Here,
conditionality focusses on the interaction between actors, while modularity is related to
different scales in time, space and organization. These depending processes on different levels
are related to issues of “policy, available information, political context and actors
characteristics” (Geertman, 2006).
Adaption and evolution is the tendency to use the own output to adjust its input and processes
via a feedback-loop mechanism, as it is described in Grus et al. (2010). This implies that the
system is able to change its own rules (Holland, 1992).

9
2.3 Multi-Agent Systems (MAS) and Agent-based Models (ABM)
Complexity in spatial planning is mainly caused by actors, spatial environment, actor-based
processes and autonomous processes (Ligtenberg, Bregt, & Van Lammeren, 2001). Processes
of spatial planning often show unexpected behaviour caused by complexity. This complexity
is related to space as a limited resource in which conflicts among actors occur more often,
since their desires and expectations anticipate the spatial environment to fulfil multiple
functions (Van der Valk, 2002).
Through the shift towards a participatory planning approach current spatial planning requires
models that describe multi-actor processes (Van der Valk, 2002). Here, an artificial
environment enables planners to “cope with the increased complexity of reality” by
developing and testing policy (Ligtenberg et al., 2004).This multi-actor planning as it is
described by Ligtenberg et al. (2004) enables actors to observe their spatial environment and
to communicate as well as negotiate their preferences. These preferences lead to decisions
that are finally implemented in the spatial system. This supports understanding and helps
planners to deal better with conflicting interests among multiple- actors for the same
resources. However, conventional or statistical modelling techniques, show weaknesses in
modelling these processes, since (Ligtenberg, 2006):
Social spatial systems do not behave according physical laws
Land-use planning does not provide well-defined description of the interactions
Causalities occur and vaporize “on-the-fly”
Dynamics behaviour is to a large extent rooted in individual behaviour (Phipps &
Langlois, 1997)
In complex land-use systems, reducibility is not a rule but rather an exception (Itami,
1994)
In contrast, agent-based computing is proposed as an alternative to solve heterogeneous,
complex, and distributed problems (Bruno, 2010). A set of elements (agents), based on a set
of appropriated rules is interacting within a given environment in this so called agent-based
models (ABM) (Bruno, 2010). ABMs are related to the concept of multi-agent systems
(MAS) which include the actor factor of decision making into the conceptual and
methodological approach of dynamic spatial models (Parker, Manson, Janssen, Hoffmann, &
Deadman, 2003). In contrast to individual agents, a system of interacting individual agents
leads to consensus building and therefore to learning capacity, intelligence and the ability of
adaptation and innovation (Innes & Booher, 1999). However, Niazi and Hussain (2011)
argue, that ABMs rather searches for explanatory insight of collective behaviour than in
engineering problems and the design of agents. MAS can help in understanding the effects of
different planning styles and actors relations changes due to different decision making
(Ligtenberg et al., 2004). According to Bousquet and Le Page (2004), MAS are defined as a
system based on a spatial environment, set of situated objects, agents, relation between
objects, operations, operators.
Two key components for MAS are described: Cellular Automata (CA) and ABM. Bio-
geophysical and ecological aspects in MAS are represented via CA and are part of the agent’s

10
environment. Social aspects important for human decision making, such as values and beliefs,
is represented in ABM. This allows the simulation of different spatial perceptions of complex
agent-agent and agent-environment interactions (Parker et al., 2003).
The priority of this research lays on decision making processes based on human opinions.
Actors involved in this study are different groups of interest or organizations participating in a
specific planning process. Therefore, the focus lays on ABM based modelling approach.
ABM allow to implement, explore, experiment, and analyse the features of an environment
based on different values and decisions (Axelrod, 1997). Further, ABMs follow a concept that
is inherently based on bottom-up approach and allows the representation of individual actor
properties, like desires, beliefs, and preferences and to simulate processes that are related to
them (Ligtenberg, 2006). In addition, ABM provide potential to its users by agents learning
ability about the environment and other agents(Gilbert & Troitzsch, 2005). To develop an
ABM four main building blocks have to be described in detail(Billari, 2006):
The object of simulation
The agents population
The adaptive capability of each agent category
The interaction paradigm among agents
ABM are described as method to simulate the interaction of heterogeneous and autonomous
agents in a common environment for the realization of both self or common interest
(Ligmann-Zielinska & Jankowski, 2007). A typical ABM contains of three main elements,
namely a set of agents, a set of agents relationships, and the agents environment (Macal &
North, 2010).
Within ABMs the active entities of the system are represented by a set of agents, a subset of
the objects (Bousquet & Le Page, 2004). These agents are defined by certain characteristics:
Within a complex dynamic environment, agents try to fulfil a set of goals (goal
oriented)
An agent has control about the own internal state, which allows to operate without
direct intervention by other agents or humans (autonomy)
Agents interact with other agents and/or humans (social ability) (Green, Hurst,
Nangle, & Cunningham, 1997).
Agents perceive and answer to signals from their environment in a precise way (re-
activeness)
In order to satisfy their own objectives, agents take initiatives (pro-activeness)
(Wooldridge & Jennings, 1995)
An agent can only exist as long as the environment is not changed. (Green et al.,
1997).
In addition Macal and North (2010) describe the state of an agents as essential characteristic
which is linked to time and environment. Further, adaptive, goal-directed and heterogeneous
behaviour were identified as useful characteristics of an agent (Macal & North, 2010).

11
Agents are connected to an environment by a set of rules and represent the main drivers of
changes (Ligtenberg, van Lammeren, Bregt, & Beulens, 2010). Agents can either show
reactive or deliberative behaviour. Deliberative behaviour assumes logic based knowledge
representations based on well-formed formulae, syntax and semantics (Singh, Rao, &
Georgeff, 1999). Reactive behaviour is built on agents linked to their environment, emerging
intelligence due to interaction, no “a-priori specification”, no high-level symbolic
representations and only partial representation of the environment (Weiss, 1999).
Agents within an ABM are always connected with other agents by a set of relationships. Two
main issues are required for the developing of an ABM. It is essential to consider, which
agent is, or could be, connected to which other agents and what the dynamics of these
interaction are (Macal & North, 2010). Since ABMs are decentralized systems, it is necessary
that local information are available (Macal & North, 2010),. Agents typically interact with a
subset of agents that are located in their close spatial environment (neighbours). Topology
immobilizes which agents transfer information and therefore it defines how agents are
connected among each other (Macal & North, 2010). It describes the spatial organization of
an agent and limits its movement and perception to the neighbourhood. Many spatial temporal
models, like ABMs, follow in the assumption of the first law of Geography by Tobler (1970):
“Everything is related to everything else, but near things are more related than distant
things.”
The environment of an agent can fulfil two main purposes. It can either be used for
information on the agent spatial location in relation to other agents or to allocate a large set of
geographic information, for instance in a GIS (Macal & North, 2010).
To design an ABM in an appropriate way, a series of questions should be asked (Macal &
North, 2010):
What problem should be solved by the model and what questions should be answered
by the model?
Who are the decision makers? What should the agent’s be? What are the entities that
have behaviour?
What is the agent’s environment and how do they interact within the environment?
What agent’s behaviour is of interest and what decision do they make?
How do agents interact with each other and with their environment?
Where might the data come from, especially for agent behaviour?
How might the model be validated, especially agent’s behaviour?
ABM based spatial planning explores new spatial future solutions and is rather driven by
emotions than by reason. Further, it involved intense negotiation processes which cannot be
repeated (Ligtenberg et al., 2009). These characteristics make it difficult to validate ABM
approached results. Human interaction outcomes like opinions, trust, or learning are
considered as unaccountable and abstract. This makes it hard to measure and therefore

12
difficult to validate the outcomes of these interactions (Parker et al., 2003). Ligtenberg et al.
(2010) explain this difficulty with the number of possible interaction between agents and their
environment and the limitation of models in representing these interactions.
However, ABMs are valuable techniques for spatial planning. Instead of predicting or
explaining future scenarios, it rather tries to explore the complex behaviour of a social-spatial
system (Ligtenberg et al., 2010). ABMs are helpful to improve our understanding about
human communication, negotiation and decision making processes (Ligtenberg et al., 2010)
related to desires, beliefs and preferences . By this the use of ABM is suitable for the purpose
of this research.
2.4 Opinion Formation
Collective intelligence is evolved by tendencies of social influence (integrative) and effects of
individualisation (disintegrative) and is essential in opinion formation (Kaur et al. 2013). The
concept of collective intelligence implies that “a large collection of people are smarter than an
elite few at solving problems” (Surowiecki, 2005). In CASs flow of information is
fundamental to explain opinion formation in networks that are formed by a collective of
individuals (Suo & Chen, 2008). Social interaction and communication are essentials in the
formation of public opinion (Powell, 1951). Individuals have preferences towards particular
phenomena. An opinion is defined as the degree of preference towards the phenomena (Kaur
et al., 2013). Individual behaviour is influenced by the environment where people live in (Suo
& Chen, 2008). A paradigm of a social network is related to the “exchange of norms, values,
ideas, and other social and cultural resources channelled through a network” (White,
Boorman, & Breiger, 1976). Cultural norms, interaction and mass media exert direct or
indirect influence on opinion formation (Kaur et al., 2013). Two fundamental axioms of social
psychology are that people construct their own realities and that all behaviour and experience
is influenced by social relationships (Smith and Guthrie 1921).
Computational models are of growing interest in cognitive science for the simulation of social
processes and group phenomena, which are caused by the interaction of social units, in order
to understand human behaviour (Gilbert & Troitzsch, 2005; Goldstone & Janssen, 2005).
Individual decisions are rather based on opinions that are formed in the context of social
interaction than purely on own values and preferences (Rilling & Sanfey, 2011). However, it
is criticised that the field of opinion formation in socio-physics suffers from lacking
connection to “real-world” societal behaviour, since it rather focusses on models instead on
social phenomena (Sobkowicz, 2009). Related to the orientation of social values in opinion
formation distinctions can be made between pro-social, individualistic and competitive
orientation. Pro-socials enhance collective outcomes (Van Lange, 1999) and are required in
spatial planning processes. Greater morality and fairness are tendencies with which pro-social
cooperation can be described (Beggan, Messick, & Allison, 1988). Katz (1992) states that
opinions lead to actions and argues:

13
“Opinions are really formed through the day-to day exchange of comments and
observations which goes on among people….By the very process of talking to one
another, the vague dispositions which people have are crystallized, step by step, into
specific attitudes, acts or votes.”
For their model about social structures of opinion formation Wu and Huberman (2004)
assume the following:
By two or three opinions the choice of individuals becomes asynchronous.
Arbitrary initial condition leads to time evolution of the set of opinions
The effect on a small number of individual with high social rank (connections) can
have on opinion formation might be larger than the effect by individuals with low rank
Asymmetries in information exchange. Some individuals are often influenced by
other’s opinion while they are unable to change the counterparts views
Group pattern formation, contagion, and cooperation are used by recent ABMs for
manipulating, predicting, and improving collective behaviour. That puts ABM based
approach in contrast to traditional assumptions of cognitive science, which sees the individual
as crucial unit of cognition (Goldstone & Janssen, 2005). According to Jager (2000) the
formation of individual opinions are seen as diverse and complex, and are affected by the
following attributes:
The preference for a particular distribution of outcomes for oneself or others (value
orientation)
Decisions are made to meet various needs, like, subsistence, protection, affection,
understanding, participation, leisure, creation, identity and freedom (needs)
People have physical, financial, and social resources that are governable to meet their
needs (ability)
Extraversion and agreeableness are personality factors affecting the behaviours of
individual decision making (personality)
Free and voluntary participation in discussion of public issues are the concept of an
deliberative democracy (Kim, Wyatt, & Katz, 1999). Habermas (1996) describes deliberative
democracy as an discursive system, which allows people to “share information about public
affairs, talk politics, form opinions, and participate in political processes”. People are
combined by their common citizenship. Individual opinions that are exchanged by interaction
are poor of influence. But they might provide powerful conviction if they are woven together
in the sense of communal will and public purpose (Barber, 2003). Social interaction and
deliberative processes confront humans with new information as well as the opinions of others
and leads to opinion change (Gerber, Bächtiger, Fiket, Steenbergen, & Steiner,
2014).Therefore deliberative processes should not be ignored for opinion forming processes.
Gerber et al. (2014) argue that the “give-and-take” of good arguments should lead to a change
in opinion, even though it stands in contrast to the assumption in cognitive science.

14
Decisions that are not accepted by the people are hard to implement in spatial planning.
Modern societies have become hard to regulate, by the shift to participatory and
communicative planning approach. Therefore, the public is mobilized by legislators to take
over responsibility of decisions (Eder, 2006). Terms like “public space” or “public sphere”
(Eder, 2006) are related to “public opinion” and are based on the concept of “Öffentlichkeit”
by Habermas (1991) in which decision making takes place. The public sphere is a domain of
social life in which public opinion can be formed and which is open to all citizens. Besides
the interaction with other people, access to media is a required medium for the formation of
public opinion (Habermas, 1991). In common surveys on public opinion, the important
deliberative component of opinion formation is missing (J. S. Fishkin, 1991). The public
sphere contains of autonomous individuals that are linked via cultural forms and provide the
basis of discourse (Eder, 2006). This discourse creates the social world individuals live in
(Eder, 2006).
Inconsistency of opinions, ignorance against political substance and incapability of valuable
contribution to public debates is addressed to the majority of citizens (Converse, 1962) and is
identified as issue and reason, why research on opinion formation and opinion change
processes remains problematic. It is assumed that the consistency of opinions differs among
different societal group. Jennings (1992) inferences opinions of political elites were more
consistent due to more political discussion. Alvarez and Brehm (2002) relate opinion
formation and opinion change to issues of framing.
Framing shapes thoughts and opinions of people against certain issues. Framing is related to
the selection and presentation of information (Gerber et al., 2014) and takes place in media
and discourses (Alvarez & Brehm, 2002). This implies that a lack in information hampers
people from opinion formation for political matters (Ackerman & Fishkin, 2002). It is
expected that framing due to deliberative processes limits the opportunity of political
manipulation (Druckman, 2001). Deliberation assumes openness to reflect on own
preferences in the light of better arguments (Barabas, 2004). Equally to all other kinds of
communication, deliberation assumes framing as unavoidable (Price & Neijens, 1998) in
order to form preferences due to political process (Chambers, 2003). The theory on
communicative acting by Habermas (1987) refers to five different action typologies of
communication:
Instrumental acting (IA): Aim is the manipulation of the outer world of objects
Strategic acting (SA): Not oriented on objects, but rather on other actors (e.g. game
theory)
Dramaturgic acting (DA): Aim of self-presentation
Norm-adjusted acting (NA): Based on natural validity of norms
Communicative acting (CA): Not success- or goal oriented; actors are not assumed to
be isolated; actors are willing to precipitate together real communication
According to Habermas (1987) deliberation is related to communicative acting. The purpose
of conversation is according to Habermas (1987) “communicative acting for mutual
understanding”. The concept of deliberative public sphere is a concept of argumentative

15
consideration. It assumes the common deliberation and communication about public affairs
based on the theory of (Habermas, 1991). This assumes ideal consulting and decision making
and is coupled to the following conditions (Schmidt, 2010):
An argumentative pattern for the exchange of information and reasons
Equal chances of access and participation for deliberative processes
The absence of external and internal constrains in deliberative processes (ideal
language situation)
The axiom that deliberative processes can be continued unlimited, or be resumed after
disruptions
The principle that debates can be extended to all materials which have to be regulated
in everyone’s interest
The chance to deliberate about necessities , pre-political attitudes and preferences
Setting the direction of the discourse towards constitution and fundamental rights
Deliberation and decision-making under participation of as much as possible
Recent literature describes an associated intensity of opinions with the intensity of political
participation (Goidel, Freeman, Procopio, & Zewe, 2008). This implies that people that are
more active in political participation and deliberative processes have a better understanding of
current issues and are therefore less polarizing and more goal-oriented towards consensus
building (Goidel et al., 2008). Further, deliberation attracts more participants that value the
role of discussion and which are more ideological moderate (Goidel et al., 2008). If we
assume that increased deliberation leads to less polarization and more consensus building, we
might gain insight what the “voice of the people” would look like under fully informed
conditions (Sturgis, Roberts, & Allum, 2005).
It is assumed that the exposure to divergent viewpoint increases the chance that people
participate in deliberation processes (Landemore & Mercier, 2012). The deliberative
exchange of arguments ceases in the reflection on own and others arguments. Either opinion
are changed due to better arguments of others, or own beliefs are perceived as fully valid and
initial opinions are established (Knight & Johnson, 2011). This implies that opinion are only
changed if the arguments of others are perceived as superior compared with own arguments
(Gerber et al., 2014).
The strength of an argument is related to robust reasoning and /or justification rationality
(Cohen, 1989). Justification rationality creates a basis of logical coherence. As a result,
arguments become accessible to rational critique and it is more likely to persuade others
(Gerber et al., 2014). In deliberation reasoning follows the purpose to convince each other of
the better argument or to honestly falsify the claims of opponents (Landemore & Mercier,
2012). Deliberative persuasion due to robust reasoning are normatively desirable conditions
for opinion change (Gerber et al., 2014). Deliberative persuasion assumes diverse pro-and
contra-positions and the linkage of these positions to well-justified premises (Gerber et al.,
2014). J. Fishkin (2009) argues that proper deliberation requires arguments for different sides
of an issue. This needs to be considered by participants in order to achieve “argumentative

16
balance”. Independence in the evaluation of arguments is an important assumption to ensure
the validity of opinion change in deliberative processes (Myers, 2012).
Social simulation (computational sociology) intends the simulation of simple activities that
show emergence of complex behaviour and is therefore an excellent technique for modelling
and understanding social processes (Salgado & Gilbert, 2013) to which opinion formation
belongs to. It allows to analyse relationships between phenomena on individual and social
level (Hedström, 2005). Through identifying a social mechanism certain social phenomena
like opinion forming can be explained (Hedström & Ylikoski, 2010). Individual interactions
form social patterns whose emergence can be investigated by social simulation (Salgado &
Gilbert, 2013).This enables in understanding how components are influenced by emerging
orders that arise from multitude of individual components (Salgado & Gilbert, 2013).Yet,
social communication is not an important issue of social simulation, which confines the
emergence and evolution of symbolic communication to computational linguistics and pre-
written code (Salgado & Gilbert, 2013). However, it is described that communication
constitutes the social realm where opinion formation takes place (Salgado & Gilbert, 2013).
Emergence assumes the coexistence of several self-organized levels in nature and society that
cannot be explained from its constituent units and where “ the whole is more than the sum of
its parts” (Salgado & Gilbert, 2013).
The social realm for opinion formation is shaped by both individual as well as collective
entities. While individual entities refer to actors, individual actions, desires, beliefs etc.,
collective entities address institutions, norms, and structures (Salgado & Gilbert, 2013).
According to Durkheim (2014) not the nature of individuals is important. Rather it is
recommended to consider the nature of society. Communication was identified as an
important issue for opinion formation. The process of emerging opinions is sensitive to
communication language and shows different results when the communication language is
changed (Sawyer, 2005).
For opinion formation it is assumed that thoughts or any psychic state are transformed into
communication language and that someone understands (ego) what is uttered by someone else
(alter) (Salgado & Gilbert, 2013) in order to create a reference situation for alters
communicative responsibility. Other individuals either understand or misunderstand this
communicative language. Individuality of human consciousness, extension of communication
beyond direct participants, and the improbability of success are three identified obstacles of
communication that have to be overcome (Luhmann, 1995).
2.5 Opinion dynamics
The study of opinion dynamics (OD) has become a popular field in socio-physics whose
interest is in the capability to predict human behaviour (Galam, 2012). In today’s democratic
societies it is essential that crucial institutional decisions consider corresponding public
opinion, in order to ensure the ability to implement certain regulations and projects (Galam,
2012). Notwithstanding, individuals often refuse proposals for certain projects or reforms,
even though they are interested in change (Galam, 2012). OD are pursued to deeper

17
confluence “hard” (e.g. physics, computer science, and mathematics) and “soft” (e.g. social
psychology, communication studies, and sociology) disciplines (Xia, Wang, & Xuan, 2011).
Similar to the first law of geography of Tobler (1970), even people are more likely to be
influenced by someone close by than by someone far away. Individual attitudes and beliefs
are randomly distributed in the begin of opinion spreading processes (Xia et al., 2011).
Models for opinion dynamics describe the opinion change due to time and influence of other
actors (Ligtenberg & Bregt, 2014). They are governed by four basic approaches namely,
social structure, opinion space, social influence, and updating rule (Kaur et al., 2013).
According to the theory of Latane (1981) social forces like strength, immediacy, and number
of sources are operating in a social structure and result in social impact. Social structure refers
to the interaction between and among individuals, as well as the frequency and way of
interaction (Kaur et al., 2013). Models of OD can be divided in two groups of opinion space:
Models of discrete and models of continuous OD. Social influence refers to the consensus in
which individual act to others expectations and beliefs (Kaur et al., 2013). The updating rule
governs the dynamics of opinion change of individuals due to interaction with others (Kaur et
al., 2013).
In discrete models opinions are defined in binary terms like “yes”, “no” or “accept”, “reject
decisions. The advantage of discrete opinions is that they can precisely find out whether two
opinions agree or not without computational based precision for numerical cut-offs , This
allows the simulation of a much larger number of opportunists (Fortunato, 2005). Ising
models and Sznajd models are examples for models of discrete OD (Stauffer, 2002).
Continuous opinion space is considered for models of continuous dynamics. For continuous
models applies that opinions on the best option are not necessarily binary, even though
someone faces a binary decision. To solve a specific problem, agents can choose among
certain alternatives. The assumption that one alternative is better than another is expressed
with the probability p. Under consideration of the consequences for a certain decision, the
alternative with highest p or 1-p is chosen (Martins, 2008). These models follow the concept
of “bounded confidence “ (BC) (Ligtenberg & Bregt, 2014). Deffuant-Weisburg (DW) and
Hegselmann-Krause (HK) are examples for models of continuous OD (Deffuant et al., 2000;
Hegselmann & Krause, 2005) where DW model exchanges information between two agents
and HK model assumes “global knowledge of each agent about the opinion of the other
agents” (Ligtenberg & Bregt, 2014). Further, Stauffer (2005) distinguishes between three
different types of OD models: Missionaries (e.g. Sznajd), Opportunists (e.g. HK), and
Negotiators (e.g. DW)
The Sznajd model is a model of discrete OD. The basic concept implies that all other
neighbours are influenced by two randomly drawn neighbours that agree to each other
(Martins, 2008). It is related to the concept of Ising spin models with the difference that
information flow outward. Opinions are represented by binary and discrete values (Xia et al.,
2011). Decisions are made in a closed community (Sánchez, 2004). It is ascribed to the model
type of missionaries which means that all neighbours are convinced within the confidence
bound of the mission. According to the idea of the model it is easier to persuade ones opinion

18
by two or more people (Xia et al., 2011). Following local rules of an Ising spins chain are
considered for the model of Sznajd-Weron and Sznajd (2000):
If SiSi+1 = 1, then Si-1 and Si+2 take the direction of the pair (I, i+1)
(R1)
if SiSi+1 = -1, then Si-1 takes the direction of Si+1 take and Si+2 the direction of Si
(R2)
This rule implies that interaction takes place when one’s agent opinion is influenced by an
agreeing neighbour-pair (R1) and other variations. The environmental structure of the Sznajd
model contains of regular lattice in of either one- or two dimension or networks (Xia et al.,
2011).However, for the purpose of spatial planning discrete opinion dynamic models, like the
Sznajd model, are perceived as inappropriate since it only allows opinion representation in
binary and discrete values (Xia et al., 2011) which always leads to consensus (Stauffer, 2005).
Due to the influence of complex processes and multiple actors (Ligtenberg, 2006) the
representation of OD for spatial planning purposes should not be restricted to a model that
only allows simple “yes” or “no” decisions and that owns no memory of their past opinions
(Martins, 2008).
Continuous models are ascribed to models of BC. BC implies a fundamental communication
rule, that “an agent’s opinion would not be influenced by another agent if the difference of the
two agent’s opinions is larger than a given threshold or ‘bound’ of confidence” (Xia et al.,
2011). This means that:
Agent X only interact with agents whose opinions is in the interval [X-Ɛ, X+Ɛ],
where Ɛ is the given confidence bound,
and that opinions at time t+1 are only updated by agents if the opinion difference at t1
is within a certain distance of each other(Ligtenberg & Bregt, 2014).
In BC models the representation of opinions is based on continuous values, real vectors. In
few researches even discrete values were adopted (Xia et al., 2011). Local rules of interaction
are based on the assumption that opinion exchange takes place in BC. The averaging of
opinions is either done in pairs (DW) or in groups (HK). Other variations are related to for
instance heterogeneous bounds of confidence. The environmental structure of BC models is
based on regular lattice and networks (Xia et al., 2011)
Negotiators in the DW model select one discussion partner in their neighbourhood per time
step. Negotiators in the DW model attempt to compromise on a square lattice which leads to
unsymmetrical opinion shifts (Deffuant et al., 2000). If the opinion difference of two
interacting agents is within a given threshold the opinions (O) of both sides are getting closer
to the average of their original opinions difference (Xia et al., 2011). This means for agent i
and j in rule form that xi(t), xj(t) is O at time t.
if |xi(t)-xj(t)| < Ɛ, then at time t+1:
Oi is: xi(t+1) = xi(t)+µ [xj(t)-xi(t)]
Oj is: xj(t+1) = xj(t)+µ [xj(t)-xj(t)]

19
where µ refers to a convergence parameter between 0.0 and 0.5 Due to a defined tolerance
threshold (D) in the DW model, interaction between agents with differences in opinion larger
than the threshold is impeded (Weisbuch, 2004). For large thresholds (D>0.5) it can be
assumed that all agents share the same opinion and complete consensus is reached and if this
threshold exceeds 0.5 the obtained consensus is independent from underlying social topology
(Fortunato, Latora, & Marchiori, 2004). In the model the D determines number and size of
clusters while µ affects the convergence speed of the system. If the threshold is smaller than
0.5 (D <0.5), different opinion clusters may live through during the evolution (Xia et al.,
2011).
The principle of the HK model is similar to the one of DW. The difference is the opinion
update of an agent-based on the average opinion of all neighbouring agents satisfying the
condition of BC (Xia et al., 2011). HK refers to a model that is non-linear and where opinions
defined model states change the model structure (Hegselmann & Krause, 2002). This implies
that agents are influenced in their forming opinions due to the consideration of other agent’s
opinions. Opportunists of HK ask per time step for the opinion of all neighbours. They take
all of them into account and calculate the arithmetic average weights of all opinions. The total
sum of all weights is 1 (Xia et al., 2011). Fewer number of final opinion clusters occur if the
bound of confidence Ɛ increases. Two main approaches were mentioned in HK to explore the
BC model with simulations, a systematic way and the KISS-principle (Keep it simple, stupid!)
(Hegselmann & Krause, 2002).
To bring the assumption into equations and rule form, we follow the description in
Hegselmann and Krause (2002). T is described as a discrete number of time (T=1,2,3…). For
a fixed agent i where 1≤i ≤n, the agents opinion at time t is denoted by xi(t) as a fixed number
and the opinion profile at time t is represented by a vector x(t)=(xi(t),…,(xn(t)) in n-
dimensional space. The weight for any other agent (e.g. j) is denoted by aij., where
ai1+a12+…+ain = 1, and aij ≥ 0 for all I,j. The averaging of opinion formation by agent i is
described by:
Xi (t+1) = ai1 x1 (t)+ ai2 x2 (t) +…+ ain xn (t)
Since weights may change with time or opinion aij = aij (t, x (t)) can be a function of t and/or
of the whole profile x(t). By obtaining a stochastic matrix with n rows and n columns we
weights can be collected within a matrix. The notation for this matrix refers to the general
form of the model (GM) and is written as:
X (t+1) = A (t, x(t)) x(t) for tƐT (GM)
The main problem that is identified in HK is the inability to answer the question on agent-
based approached consensus by computational simulation and mathematical analysis.
Therefore, the GM is treated by various specialisations. In the classical model (CM) of fixed
weights, where A is a fixes stochastic and x(t) is the column vector of opinions at time t:

20
x (t+1) = Ax (t) for Tɛt (CM)
Another variation of this model assumes the opinion formation under social influence where
agent i adheres to his initial opinion to a certain degree gi and that the agent is socially
influenced by susceptibility of 1-gi. When these assumptions are considered the CM becomes
either:
Xi (t+1) = gi xi (0) + (1-gi)(ai1x1(t)+…+ain xn (t))
,or written as matrix,
x (t+1) = Gx (0) + (I-G) Ax (t) for tƐT
Diffusion of opinions are considered as an important factor in the process of multi-actor
spatial planning processes but a behavioural approach is missing in most spatial ABMs
(Ligtenberg & Bregt, 2014). Heterogeneous stakeholders and actors with diverse and
changing goals and motivation make spatial planning a non-linear and dynamic process (van
Voorn, Ligtenberg, & ten Broeke, 2014). Four factors of spatial planning are mentioned by
that might influence OD significantly:
Reputation: “Higher” ranking agents are more dominant in interactions which leads to
biased opinion exchange
Peer pressure: Solitary agents changes opinion more often that a group with the same
opinion
Empathy: How an agents listens and is willing to accept other opinions
Isolation and spatial effects: Agents are mostly settled in a certain location with a
limited action radius. Therefore interaction takes more likely place with neighbouring
agents than with agents more far away.
Ligtenberg and Bregt (2014) recently presented a novel approach for the simulation of spatial
OD, based on the DW approach. The described approach deals with heterogeneity in spatial
opinions as well as the willingness of agents to adapt their opinions. The described approach
considers opinion forming as diffusion process what comprises learning, contagion, mimicry,
trust, reputation, etc. (Strang & Soule, 1998). Diffusion models that were modelled in a
traditional aggregated manner are unable in dealing with heterogeneity in population and
spatial environment, and therefore cannot explain social processes and social change
(Kiesling, Günther, Stummer, & Wakolbinger, 2012). In opposite ABMs system is built by
individual entities which allow the simulation of change under consideration of different
actors and a variety of spatial and temporal scales (Parker et al., 2003). Existing models of

21
OD, like WD and HK show limitations when it comes to answer economic or emotional
meaning of space in order to explain opinion diffusion of individual actors (Ligtenberg &
Bregt, 2014).
The proposed model for spatial OD by Ligtenberg and Bregt (2014) is characterized by three
aspects namely, the initial opinion of an agent about a location, the social influence, and the
spatial influence. Within the model it is focussed on OD under consideration that at individual
level decisions are made which results in initial opinion of each agent. These initial opinions
are based on the evaluation of spatial and non-spatial aspects which are considered as
important by agents in order to realize desires which are based on existing knowledge of the
agents. A number of rules are formulated to translate individual desires of agents. The
meaning of social influence often leads to clustering of individual actors in spatial planning
systems, since they are connected in the same location by similar interests (Ligtenberg &
Bregt, 2014).
2.6 Conclusion
In modern spatial planning short term solutions are no longer an adequate approach to deal
with collective interests. A growth in the amount of policies and actors with diverse interests
as well as a shift of participation towards an earlier stage in the process leads to increased
complexity of spatial planning processes and requires models of inclusive strategies. The
complexity occurs since desires and expectation on space, as limited resource, are various. In
order to simulate the interaction of heterogeneous and autonomous agents in a common
environment, the use of ABM seems to be a feasible method. However, validation of the
outcomes from human interactions is difficult since they are described as abstract and
unaccountable.
Most spatial ABMs are missing a behavioural approach of opinion diffusion as important
factor of multi-actor spatial planning. Spatial planning is a process of a CAS that changes
both physical environment and social reality of actors. Simultaneous and mutual interaction
between different components is embedded in spatial planning processes. The perception of
the spatial environment as well as intentions and strategies differ among participating actors
in planning processes. To encourage people to participate in spatial decision making, trust is
an essential element. Trust is considered as social construct that characterizes human relations
and is built by deliberative processes.
In current multi-actor spatial planning the role of opinions is narrowly included. This is less
referable to lacking awareness about the meaning of opinions for planning processes. Rather it
is related to limitations as it comes to explain opinion diffusion in a spatial context and to
model these complex systems in a computational simulation. Essential in opinion formation is
to evolve collective intelligence by integrative and disintegrative processes.
Influence is exerted by cultural norms, interaction and mass media which leads to individual
decision making based on opinions that are formed in the context of social interaction.
Individual opinions need to be woven together to become persuasive for certain approach in

22
multi-actor spatial planning. However, in current socio-physics, opinion formation suffers
from lacking connection to “real-world” societal behaviour. The problem is that current
approach in socio-physics rather focusses on models of OD instead of social phenomena.
Desirably, it should be considered that opinion forming due to deliberative processes is
confronted with different participative intensity of different actors. This leads to diverse
consensus building as well as variations in opinion formation among actors involved in the
planning process. The complexity of including opinion formation into models of OD becomes
obvious. Goals and motivations of individual actors are changing due to social-and spatial
influence as well as the initial opinions about certain locations.
Actual models are governed by the approaches of social structure, opinion space, social
influence, and updating rule and are either of discrete or continuous opinion space. Modelling
of discrete opinions does not fulfil the purpose of multi-actor spatial planning, due to discrete
and binary opinion representation. Continuous models of BC, however, are dealing with the
averaging of opinions, either in pairs (DW), or in groups (HK), and are more suitable to
represent the complexity of opinions in multi-actor spatial planning compared with models of
discrete OD. However, as it comes to model opinions for multi-actor spatial planning, current
models of OD are lacking in the inclusion of a spatial component.

23
3 Conceptual approach
3.1 A suitable model
It was assumed that opinions during the planning process were exchanged among different
actors. These opinions were formed by actor’s individual desires, beliefs, values, and
preferences on both, social and spatial aspects. Figure 2 below gives an overview on how
actors interact with their social and spatial environment. For the update of own opinions the
influence of interaction with other actors was taken into account.
Fig.2: Intentional model of actor based decision making
A suitable model to simulate OD for spatial planning purposes was linked to certain
requirements. Since discrete models were described as inappropriate for spatial planning
purposes, a suitable model was searched for among continuous OD models. Three different
model approaches (HK, DW, and Ligtenberg-Bregt (LB)) were compared in order to find the
best suitable approach for the simulation of OD in spatial planning processes. The LB
approach stands for an extended version of the DW model. All models followed the concept
of BC as a precondition for the communication among agents. This seemed reasonable for the
simulation of actor communication in a real world scenario of spatial planning. In addition,
the model had to make use of both, social and spatial components, since both exert influence
of the opinion of actors. Table 1 below gives an overview about social structure, social
influence as well as the identified strength and weaknesses of each of the three models.
The approach by Ligtenberg and Bregt was assessed as most suitable for the purpose of this
study. Firstly, because the social structure of LB assumes information exchange between pairs
of individual agents per time step. This seemed a realistic assumption for the majority of
opinion exchanges in planning processes since most opinion exchange takes place in daily
interaction among neighbouring actors and not in group discussion.

24
Tab. 1: Comparison of continuous OD model approaches
Hegselmann-Krause (HK) Deffuant-Weisbuch (DW) Ligtenberg-Bregt (LB)
Social
structure
Agent asks for the
opinion of all
neighbours per time step
Information exchange
between two agents per
time step
Information
exchange between
two agents per time
step
Social
influence
The calculated average
of weights of all
opinions determine the
degree of influence
Both sides are getting
closer to the average of
their original opinion
difference
Both sides are getting
closer to the average
of their original
opinion difference
Strength
Polarisation and
consensus can be
reached by both,
asymmetric and
symmetric confidence
Straight approach in
agent interaction
The influence on
opinion change by
individual agents can
be defined
The influence on
opinion change by
individual agents can
be defined
Takes spatial
influence of an
opinion into account
Generates plausible
spatial patterns of
opinions
Straight approach in
agent interaction
Weaknesses
In spatial planning
opinion exchange barely
takes place between all
agents at the same time
Does not take the spatial
influence of an opinion
into account
Global knowledge of
each agent about the
opinion of other agents
is not realistic in spatial
planning
Does not take the
spatial influence of an
opinion into account
Interacts randomly
with other agents and
focusses rather on
threshold value instead
of social connection
Only allows
representation of OD
at aggregate level
Group dynamic
processes as
cooperation and
negotiation cannot be
easily included in the
model
Secondly, paired interaction between agents allows the definition of individual influence per
agent. Thirdly, the consideration of spatial influence and economic or emotional meaning of
space for opinion diffusion in, gives each agent an initial opinion about space. This seemed
realistic, since spatial planning processes deal with issues of spatial decisions making and
actors are influenced in their initial opinion not only by their social environment but also from

25
their spatial environment. However, it had to be considered that LB only takes one issue of
spatial planning into account.
3.2 Conceptual Model
Fig. 3 gives an overview on the conceptual approach. All variables from a field of interest
were collected within a real world scenario. The variables were assessed regarding the utility
for further implementation within the simulation model.
Fig. 3: Conceptual approach
Opinions
Opinions in the real world are diverse and differ among actors to a large extent. For this study
the model approach of Ligtenberg and Bregt was chosen as a starting point which is based on
the OD model of DW. This model was chosen for three reasons. Firstly, it assumes
continuous exchange and influence of opinion between actors where differences in opinions
are within a certain threshold (BC). Secondly, interaction among individual agents takes place
among two agents per time step, instead between all actors. Thirdly, the model includes the
economic and emotional meaning of space to explain the spreading of actor’s opinions.
Compared with other OD models, this one was assumed as the most suitable for the purpose
to model multi-actor spatial planning processes.
Spatial planning
In the real world spatial planning is diverse and addresses several fields of interests.
Therefore, a relevant case in spatial planning was chosen that refers to a local allocation

26
problem. Finding a siting location for wind turbines that is least conflicting with the average
opinion of all residents within an area was the case that was chosen for the model. Site
allocation of wind turbines on local scale is a planning approach that enabled us to limit the
scope of the research as well as the amount of actors. This was relevant since the intentions,
strategies, and spatial perceptions are different among actors and planning decision are of
high collective interests.
Demographics
The initial opinions of actors were also influenced by non-spatial characteristics. In the real
world, demographics like age, gender, education level and residence assign actors to certain
social roles. As previously described the intensity of opinions is related to participation in
deliberative processes. Actors have different interests and standards for participation in
planning processes. Actors that make more use of media and which are capable to argue
decently, to reflect on own and others arguments, and thus confirm or shift their own
opinions, participate more often in deliberative processes. In this study it was assumed that
these skills were related to different level of education. Education level was used as a social
parameter that was represented by two values, resilience factor against opinion adaptation
plus a influence factor. That enabled us to build a hierarchy on opinions. Certain groups in the
model had weak, moderate or strong initial opinions about their spatial environment.
Spatial aspects
In the real world, actors are influenced in their opinions by several spatial aspects like for
instance location, topography, spatial distance, and size. The evaluations of these aspects were
equally to social aspects important as agents form initial opinions about a certain locations.
For this study, the spatial distance of individual actors to both, the possible site of wind
turbines as well as to other actors was essential. Actors had spatial opinions that were formed
by individual desires, beliefs, and preferences about their spatial environment. In- and
decreasing spatial distance between planned facilities to the actor location was one important
aspect for opinion change (e.g. NIMBY syndrome). In addition, spatial distance was an
important aspect since communication and influence among actors’ decreases by increasing
spatial distance between them.
Social connections
In the real world actors are connected in social community via social networks. Social
interaction takes place between two, more than two, or groups of actors and is essential for
opinion formation and opinion change in the social space. It was assumed that agents have
different threshold for cooperation and interaction with other agents. This threshold changes
over time and by location. In this study, social interaction took temporary place between pairs
of individual actors per time step in the model. This was assumed to be most realistic since
most planning processes do not ask all actors at once at the same moment in time. Rather,

27
negotiation, communication, and opinion exchange among actors takes place in many
consecutive steps.
Modelling tool
To model the OD in spatial decision making an ABM based model was implemented in
NetLogo software. An ABM approach was chosen as it was described as excellent technique
for modelling and understanding social processes like opinion formation over time due to
model iterations. NetLogo was chosen since it is described as suitable software to model
complex system evolving over time.
3.3 Description of the Model
The ABM model is described according to the principles of the ODD-protocol. This approach
was chosen since it was designed by academics to ensure the readability and completeness of
the model descriptions. The ODD-protocol follows a clear and simple structure and contains
of three different blocks that are subdivided into seven different elements (Fig.4).
Fig.4: ODD approach according to Grimm et al. (2006)
Purpose
The purpose of the model was to gain better understanding on how communication and the
exchange of opinions among actors leads to opinion diffusion, in particular for consensus
building on a spatial planning allocation problem. Therefore, it was investigated how model
outcomes were influenced under different conditions of spatial distance, social distance and
participation.
State variables and scales (Tab. 2)
The fundamental low-level entities of the model were individual actors. Actors were selected
by a four digit postcode for a certain location and by age. Further, actors were assigned to
groups based on their level of education. The selection was done via provided data by the
Dutch office for statistics (www.cbs.nl). Each agent has the following characteristics:

28
Tab. 2: Entities, variables, and scales of the simulation model
Entities/ variables/ scales Characteristics
Individual actors
defined by age, level of education, and
location.
Education level
low (vmbo, max. 3 years havo/ vwo)
moderate (havo and vwo)
high (wo and hbo)
Location
four digit postcode (state 2011)
Spatial distance
spatial distance between actor-actor and
actor-siting location
Social distance
communication only place
if social distance < threshold (D)
Actors with low education level
low resilience against opinion adaptation
highly influenced by others opinion
little influenced by spatial distance
Actors with moderate education
mod. resilience against opinion adaptation
mod. influenced by others opinion
mod. influenced by spatial distance
Actors with high education level
high resilience against opinion adaptation
little influenced by others opinion
highly influenced by spatial distance
Land-use
buildings
agriculture
forest
water
Time step
one tick in the model equals one interaction
Time horizon
200 ticks
Cell size
25x25 meter
Model extent
world consists of 107 rows and 163 columns
(2.675 x 4075 km)

29
Process overview and scheduling
The dynamics of opinions (Ok) in the model followed three main characterizations, namely, an
agent’s initial opinion about a location (Oi), the social influence (Qs), and the spatial influence
(Qg). According to these characteristics opinion dynamics in a social-spatial system were
expressed with:
Ok,(t+1) = f(Oi(k,g,t), Qs(k,g,t), Qg(k,g,t))
Fig. 5 below gives a general overview of the model approach. A summary of variables and
equations can be found in appendix. The model proceeds in ticks. Each tick represents one
time step and thereby the interaction of groups of two randomly paired agents. In total the
model runs for a total of 200 interactions. Within each time step the model processes eight to
nine different phases in seven to eight time steps. The initial opinion of an agent about a
location is calculated in the setup function and represents the starting situation of the model.
From here, social influence and spatial influence on own opinions are calculated
simultaneously during the following step.
Based on the factor of social and spatial influence the social distance threshold D is updated
in the next step of the model. First, a weighting factor for the adaptation of d is calculated.
Afterwards the weighting factor is used to update d. Next agents are randomly linked to
another agent and calculate their social distance for all individual location. However, that
more close agents are socially related that higher the frequency of linked connections. Social
distance is defined as the difference of opinion about a certain location. Agents update their
opinions if the social distance on a certain location is below the updated d.
Otherwise, the opinion update is omitted and the social distance for the next location is
compared until the opinions for all cells have been compared. Updated opinion are stored and
used as input for the next iteration step and the opinion exchange with a new linked agent. .
Fig 5: Iteration procedure per agent adapted from the approach by Ligtenberg and Bregt (2014)

30
Design concepts
Emergence: Opinion dynamics emerged due to the interaction of agents and the mutual social
and spatial influence. A coexistence of different self-organized agents was assumed whose
spatial decision making cannot be explained from their constituent opinions and where the
whole of opinions has a bigger influence than the sum of individual opinions.
Adaptation: Agents adapted their opinions by interaction with other agents. Default values for
spatial and social influence were assigned by a set of equation. According to the opinion
properties, agents influenced other agents or got influenced by them to a certain amount. Due
to different opinion properties, the adaptation of opinions among different agents took
different number on interactions.
Fitness and Prediction: The model did not explicitly calculate the fitness of an opinion.
Rather the model result highlights locations that assume both, areas with least expected
conflicts and areas that are absolutely not negotiable. The results are based on the average
opinion of all agents. Further it highlighted locations where the differences in opinions where
low or high.
Sensing: All individuals were assumed to know their location and level of education. By
knowing this they applied a specific rate of resilience against the adaptation of others
opinions. Further they were differently influenced by social and spatial characteristics.
Interaction: One type of interaction was modelled implicitly per model iteration, namely,
interaction between pairs of two randomly chosen agents. Opinion update between them took
place if social distance for a certain cell was below the updated d
Stochastic: All participation, opinion and influence parameter and values were interpreted as
continuous probabilities between [0…1], where 0 was the lowest and 1 was the highest
probability. These probabilities were drawn to include noise for opinions, and influence.
Noise could for instance be occurring due older farmers with a low education level, which
were assumed to have strong spatial opinions and a high participation rate.
Collectives: Individuals were grouped into collectives of three different social groups. The
classification was based on their education level. Individuals were grouped to either low
educated, moderate educated, or high educated.
Observation: For model testing the distribution and influence of agents opinions were
observed step by step. Starting with a small scale model with only two interacting agents, the
amount of influencing parameters, agents and the scale was increased stepwise. This should
help in understanding the influences of different model components and to approach in the
most accurate way. For analysis individual group sizes of different actors and their
distribution were recorded in order to analyse differences in the spatial pattern of different
model outcomes.

31
Environment: Agents were located in a grid based representation of the environment that was
formalised in an ordered collection of cells. The environment was represented with
C = (ci, j, ci+1, j, ci+1,j+1,…,ci+n, j+n)
, where the location in the cell was represented by i,j. Each cell contains information and
represents a discrete part of the area. The four land types were buildings, agriculture, forest,
and water. The number of cells that were occupied by a certain land type was pre-defined in
the input dataset of the model.
Opinions: Three groups of agents were represented in the model. In contrast to other models,
the initial opinion on a location was not based on agent’s desires but rather on distinct opinion
based on distance and land-use. Therefore, an initial opinion value between [0…1] was
determined for every cell that was occupied by a certain land characteristics. This resulted in
12 different initial spatial opinions per group. A value of 1 represents a location that was
absolutely not negotiable for the siting of wind mills. A value of 0 describes full acceptance of
the location for the siting of windmills. A description of values and parameters was described
in table 3 in section 3.5. Even though costs and environmental disturbances are important
factors in deliberative processes, they were not considered for complexity reasons of the
model.
Participation: Participation was divided in three different values based on the education level.
Actors with low education only participated with actors in near distance, actors with moderate
education participated with actors up to middle distance, and actors with high education
participated with actors up to far distance.

32
Interaction:
Fig 6: Representation of actor communication. With increasing spatial distance interaction decreases
between locations. With increasing social distance interaction decreases between agents.
Fig. 6 above describes interaction among actors based on social and spatial distance. Those
closer different actors are socially and spatially related that more intense interaction takes
place. The classification is done related to three different distance zones near, middle, and far
plus social distance based on an education level. This results to different levels of interaction
instead of continuous decay. Agents that share a location that is close to each other talk more
often to each other. The same counts for people that have a similar education. The interaction
with other agents decreases with increasing distance to their own location If distances become
bigger than a maximum accepted distance, interaction takes no longer place.
Initialization
The initial area of the final model environment contained of a world consisting of 107 rows
and 163 columns. Each area was initially occupied by one different group of agents. For the
reason of computing time one agent is in place for 10 agents with same characteristics and
opinions. Each simulation run started on the first tick and took 200 iterations in total.

33
Input
The input on spatial opinions for different land characteristics were diverse, since the three
groups of agents provided different conditions for deliberation and opinion forming. As a
consequence, consensus building in areas that were occupied by strong spatial opinion (e.g.
buildings) became more difficult than in areas with weak spatial opinion (e.g. agriculture).
Further, consensus building was dependent on the distribution of the actors within the model
area.
Sub-models based on LB approach
Opinion per location: An initial opinion on a certain location was one of the characteristics of
the OD model. Agents of a certain group k had an initial opinion O for a certain land
characteristic g. The opinion was expressed by a value between [0, 1], where 0 is lowest and 1
is strongest opinion. The individual opinion on this location at time t was expressed by:
Oi(k,g,t)
Social influence: The calculation of social and spatial influence is a process step that took
place simultaneously. Social influence in the model described the degree of opinion change or
reassurance of agent’s opinions due to the comparison and interaction with opinions of others.
Here, the intensity of influence depends on how agents are located and connected with each
other in the model environment. The main concept in this research is that the connection
between different agents is related to social and spatial distance (Fig.6). Both, the exchange of
opinions as well as the social influence between two agents decreases when they are socially
further away. In addition, spatial distances also exert influence on the communication
between actors. Those further agents are spatially away that fewer connections are made
between their locations. This results in active communication in the close neighbourhood and
rare opinion exchange with agents that are living further away. The intensity of spatial
influence on agent’s opinions decreases with increasing spatial distance between to agents.
Social influence was calculated with:
Qsoc(k,g,i,j,t) = ∑ 𝑊 (𝑙,𝑔,𝑖,𝑗,𝑡) 𝑁
𝑡=1
𝑁
, where social influence is the ratio between N w(l, g, I, j, t) as agents below a certain threshold to
enter the negotiation and N for the total number of agents having an opinion on a certain
location.
Spatial influence: Spatial influence was calculated with
Qspak,g,i,j(t+1) = ∑ ∑ 𝑂𝑘,𝑥,𝑡 𝐾
(𝑘=1) 𝑋(𝑥=1)
𝑁

34
, where the opinion of agent k for a certain land characteristic g at location i, j was influenced
by the spatial influence factor Qspak,g,i,j(t+1). This one was calculated by the sum of stored
opinions in a set of cells for X and a set of cells for K, divided by N (= |X| *|K|).
Update social distance threshold: A weighting factor was calculated that was based on social
and spatial influence in order to adapt the social distance threshold D. The weighting factor is
first calculated with
Qk,g,i,j,t = π*Qsoc(k,g,i,j,t) + (1-π) * Qspak,g,i,j,t
The priority of social influence versus spatial influence is indicated by the parameter π. After
that d was adapted by
d’k,g,i,j (t+1) = d(k,g,i,j t) * (1-(|Ok,g,i,j,t –Qk,g,i,j,t|)τ)
, with d’k,g,i,j (t+1) as adapted d for agent k at time t+1 and τ as resilience against opinion
adaptation.
Pick random agent: After the calculation of initial opinions, social and spatial influences as
well as the update of the social distance thresholds, agents picked randomly another agent and
calculated the social distance between them.
Social distance: Defined as opinion differences on a certain location i, j between two agents k,
l and was expressed by
S(k,l,i,j,t) = o(k,i,j,t) – o(l,i,j,t)
Check social distance threshold against calculated social distance: Precondition for
interaction among agents was
S(k,l)(i,j)<dki,j
The precondition assumed that the social distance between two agents was below the social
distance threshold before they could enter negotiation. If the social distance was larger than
the given threshold, agents skipped the following step and precede directly to the last process
step and picked a next location.

35
Apply DW for location: If the precondition was fulfilled agents opinion were updated by an
DW approach that was adapted to a spatial context
O(t+1)(a,i,j) =O(t)(a,i,j)+ µa (O(t)(a, i, j)- O(t)(b,i,j))
and
O(t+1)(b,i,j) =O(t)(b,i,j)+ µb (O(t)(b, i, j)- O(t)(a,i,j))
. Agents meet each other randomly for communication, which is the base for the
communication protocol. Parameter µ was considered as agent specific but independent from
location.

36
4 Results
4.1 Case study
After formulas and concepts have been implemented to a functioning code, the model was
tested on a specific spatial planning siting problem. For a distinct area, the model should help
to identify locations that were most suitable for the siting of a wind turbine. Most suitable
were locations that were least conflicting by their average opinion and where the difference in
opinion was lowest. The northern area of the Dutch city Wijchen was chosen as location.
First, spatial circumstances were reclassified to a dataset with the four main land-use type’s
buildings, agriculture, forest, and water.
Fig. 7: Case study area in the Northern part of Wijchen/ the Netherlands
Fig. 8: The case-study area as displayed in Google Earth

37
Afterwards, statistics about residents and their education level were acquired via the Dutch
statistical agency (www.cbs.nl). In total the model was tested for three different scenarios (a,
b, and c). Each scenario was tested under three different social distance thresholds (D), which
result in a total of nine different test conditions. For each test condition highs and lows of
averaged opinions as well as opinion differences were investigated. In addition, it was tested
how individual opinions of actors were distributed after certain amount of interactions. Figure
8 above shows the case study area from aerial observation. Table 3 below gives an overview
about the different input variables of the models.

38
Tab. 3: Aspects, variables, and default values for the scenario case study on Dutch postcode 6604
(Wijchen). a,b, and c describe different default values per scenario
Overview of processes, parameters and default values
Aspect Variable Default value
Social distance threshold
non-cooperation
cooperation
strong-cooperation
0.2
0.5
0.8
Groups of 10 agents based on education level
low
moderate
high
(a,b) 30, (c) 45
(a,b) 40, (c) 30
(a,b) 37, (c) 20
Spatial distance (25x25 m res.)
near
middle
far
(a,c) < 20 (b) < 10
(a,c) 20 – 39 (b) 10 -19
(a,c) ≥ 40 (b) ≥ 20
Strength of initial opinion
opinion
low-opinion
mod-opinion
high-opinion
[0…1]
0.6 * opinion
0.8 * opinion
opinion
Opinion influenced [0...1]:
Low
Moderate
High
socially influenced
spatially influenced
resilience
socially influenced
spatially influenced
resilience
socially influenced
spatially influenced
resilience
0.7
0.3
0.5
0.5
0.5
1.5
0.3
0.7
2.5

39
4.2 Scenarios
As mentioned earlier the model has been tested on three different scenarios, namely:
Scenario a: Different participation and complete distances
Scenario b: Different participation and half distances
Scenario c: Equal participation and complete distances
Scenario a and c consider a planning situation in which all the participation of agents is
related to their education level. It is assumed that people with higher education tend to
participate more often in planning processes compared with people with moderate or low
education. In scenario c no distinction is made between participation and education level. All
agents participate to the same extent in the negotiation process.
Distances in the scenario categorize different zones in which agents are influenced in their
opinions. Complete distances in scenario a and c assume a planning situation in which agents
are influenced to a certain degree based on predefined distance zones (Table 3.). In order to
investigate the influence distance exerts on agent’s opinions scenario b halves the spatial
distances between the different distance zones.

40
Results scenario a
Fig. 9: Scenario a - Different participation and complete distances with average
opinion (1a, 3a, 5a) and deviations of the average opinions (2a, 4a, 6a)
The model outcomes showed visible differences. By an increased social distance threshold
(D) the amount locations with eihter a very high opinon against (red) or a very low opinion
against (green) occurred less often in all three scenarios. Tabel 4 gives an overview on the
average opinion related to different thresholds of D. An increased D led on green and red
locations to an higher value for averaged opinions. Since they act within their accepted social
distance, the increased D also led to higher equalization of opinions by an increased actor
communication. This even becomes obvious by looking at the values for opinion difference
(Tab. 5). With a low D the value for opinion difference is relatively low. With an increasing D
the value for opinion difference also increases.

41
Tab. 4: Scenario a - values of average opinion under various thresholds
Scenario Strongest averaged opinion against
(red)
Weakest averaged opinion against
(green)
(1a) D = 0.2 0.7429 0.0901
(3a) D = 0.5 0.9872 -0.1490
(5a) D = 0.8 1.0736 -0.1641
Tab. 5: Scenario a - values of opinion difference under various thresholds
Scenario Strongest opinion difference
(red)
Weakest opinion difference (green)
(2a) D = 0.2 0.0343 0
(4a) D = 0.5 0.0790 0
(6a) D = 0.8 0.1239 0
With a D of 0.2 all three scenarios show no visible influencing effect on the strength of an
opinion.That may be because of the very low threshold for the social distance. It might be
considered that the little interaction is related to the narrow narrow-minded attitude of the
actors.
With a D of 0.5 opinions are less strong influenced in scenario b and c compared with
scenario a. For scenario b this might be explained with the halving of the spatial distance.
This change in spatial distance leads to a rapid increase of the social distance and therefore
inhibited interaction between actors. In scenario c a changed amount of participating actors
leads to a redistribution of availabel opinions and a concomitant increase of opinions that are
widely seperated.
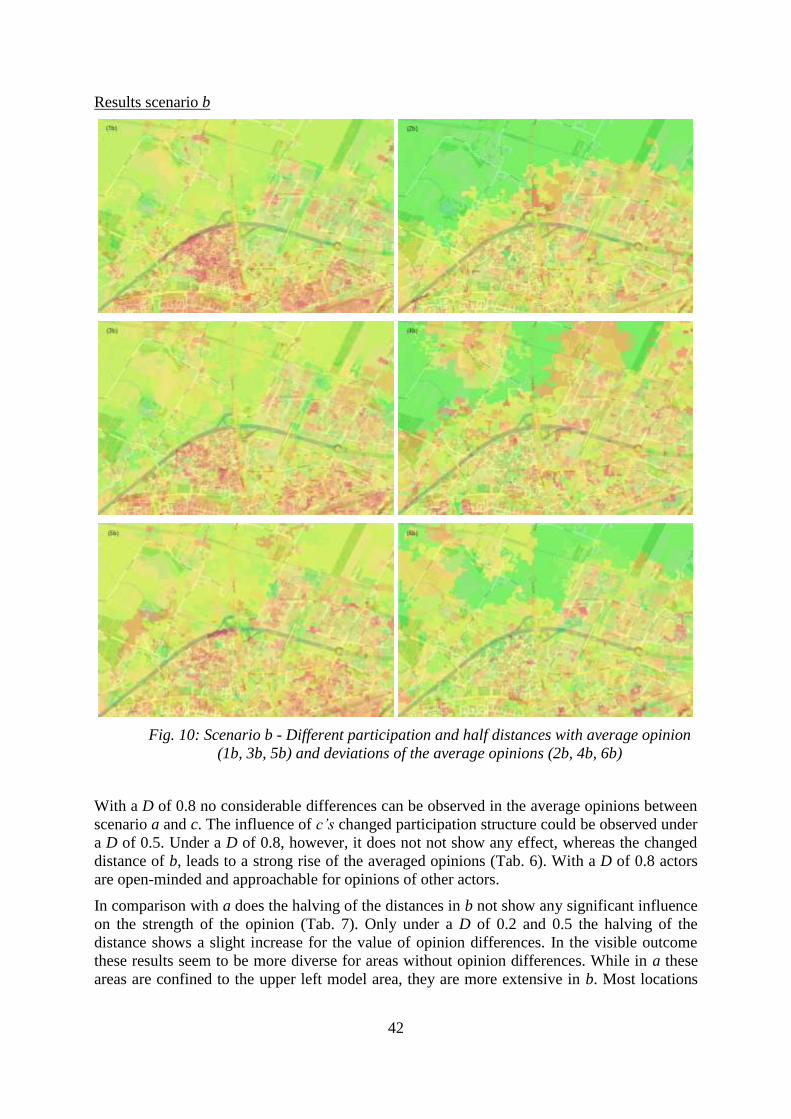
42
Results scenario b
Fig. 10: Scenario b - Different participation and half distances with average opinion
(1b, 3b, 5b) and deviations of the average opinions (2b, 4b, 6b)
With a D of 0.8 no considerable differences can be observed in the average opinions between
scenario a and c. The influence of c’s changed participation structure could be observed under
a D of 0.5. Under a D of 0.8, however, it does not not show any effect, whereas the changed
distance of b, leads to a strong rise of the averaged opinions (Tab. 6). With a D of 0.8 actors
are open-minded and approachable for opinions of other actors.
In comparison with a does the halving of the distances in b not show any significant influence
on the strength of the opinion (Tab. 7). Only under a D of 0.2 and 0.5 the halving of the
distance shows a slight increase for the value of opinion differences. In the visible outcome
these results seem to be more diverse for areas without opinion differences. While in a these
areas are confined to the upper left model area, they are more extensive in b. Most locations

43
without any opinion difference are located in areas without or with barely residential
development.
Tab. 6: Scenario b - values of average opinion under various thresholds
Scenario Strongest averaged opinion against
(red)
Weakest averaged opinion against
(green)
(1b) D = 0.2, ½ Distance 0.7229 -0.0098
(3b) D = 0.5, ½ Distance 0.8954 -0.1025
(5b) D = 0.8, ½ Distance 1.3502 -0.4086
Tab. 7: Scenario b - values of opinion difference under various thresholds
Scenario Strongest opinion difference
(red)
Weakest opinion difference
(green)
(2b) D = 0.2, ½ Distance 0.0470 0
(4b) D = 0.5, ½ Distance 0.0862 0
(6b) D = 0.8, ½ Distance 0.1282 0

44
Results scenario c
Fig. 11: Scenario c - Equal participation and complete distances with average opinion (1c,
3c, 5c) and deviations of the average opinions (2c, 4c, 6c)
The same participation of all actors in c leads to slight increased values of opinion differences
compared with the other scenarios (Tab. 9). This might be related to a shift in the distribution
of strong and weak opinions. Fewer actors with strong opinions are confronted with more
actors with weak opinions. Even though weak opinions are far less influencing, this finally
leads to a slight increase of opinion differences. The visual output of c is similar to the visual
output of a. For all three D in c a consistent distribution of opinions with some hotspots for
strong or absent opinion difference is recognizable. The values for average opinions in
scenario c do not show a serious deviation from values in scenario a and scenario b (Tab. 8).
In general it may be registered that opinion differences increase for all three scenarios with an
increasing D. This might be referred to increased communication between open-minded
actors that are more willing to interact and to adjust their opinions to those of others.

45
The results of the three different scenarios illustrate that the calculation of suitable locations
for the siting of a wind turbine requires both, spatial distances as well as the collocation of the
participating actors as an important factor. These factors need to be considered in a simulation
model for a spatial planning siting problem.
Tab. 8: Scenario c - values of average opinion under various thresholds
Scenario Strongest averaged opinion against
(red)
Weakest averaged opinion against
(green)
(1c) D = 0.2 0.7629 0.0802
(3c) D = 0.5 0.8854 -0.0264
(5c) D = 0.8 1.0746 -0.1705
Tab. 9: Scenario c - values of average opinion under various thresholds
Scenario Strongest opinion difference
(red)
Weakest opinion difference (green)
(2c) D = 0.2 0.0509 0
(4c) D = 0.5 0.1043 0
(6c) D = 0.8 0.1436 0

46
4.3 Opinion distribution

47
Fig. 12: Distribution of all opinions after 20 interactions (ticks)
Tab. 10: Statistical outcome for all scenarios after 20 rounds of interaction
Scenario Minimum Maximimum Mean Standard deviation
(1a) D = 0.2, SP 0.1507 0.8500 0.4164 0.1214
(3a) D = 0.5, SP 0.0649 0.7500 0.4283 0.1282
(5a) D = 0.8, SP 0.0619 0.8106 0.3938 0.1253
(1b) D = 0.2, HD 0.0686 0.6469 0.3674 0.1024
(3b) D = 0.5, HD 0.0907 0.700 0.3844 0.1114
(5b) D = 0.8, HD 0.0044 0.7874 0.3791 0.1291
(1c) D = 0.2, EP 0.1000 0.9000 0.4154 0.1329
(3c) D = 0.5, EP 0.1000 0.8250 0.4015 0.1259
(5c) D = 0.8, EP 0.0001 0.9000 0.4114 0.1499
To analyse how the opinions of different actors were compounded, a histogram was made for
each scenario that represents all opinions after 20 model ticks. Observing the results makes
obvious that in each scenario most opinions are concentrated around one or two peaks. The
results show that certain parameter settings lead to bi-modal distribution and not normal
distributions. This behaviour means that the values for traditional mean and standard
deviation in table 10 are not the best measure. The opinions that shows the highest frequency
in each scenario is located around 0.3.
In scenario a the distribution of opinions gets wider by an increasing D. This also leads to a
decreasing opinion frequency of individual peaks, which results in a assimilation on a normal
distribution of the opinions. The highest frequency of individuell opinions lays for all D
between 0.3 and 0.4.
In scenario b there are barely visible differences between a D of 0.2 and 0.5. Both have two
peaks around 0.3 and 0.5. The peak around 0.3 shows a frequency of 500, which is five times
higher compared with the second highest value. With a D of 0.8 the frequency of this peak is
around 350. Opinions are wider distributed and converge at one the peak around 0.3.

48
In scenario c the curve shape is similar to a. At a D of 0.2 and 0.5 it is recognizable that
opinions are not or barely adjusted and that the historam provides gaps in the opinion
distribution. With a D of 0.8 the distribution becomes wider and the distribution approaches
the shape of a normal distribution with the highest frequency around 0.3.
On the basis of scenario 5a under a D of 0.8 it was analysed how the opinion distribution
changed during the first ticks. Therefore changes were observed for the first five, the tenth,
and the twentieth tick. The results show obviously that strong variations of maximum and
minimum values especially occur during the first ticks. Opinions are mostly influenced in
their frequency during the first two ticks. Within the first two ticks, the frequency of the
dominant opinion strongly decreases and more opinions occur within the range between
lowest and highest opinion. Table 11 and figure 13 below show the statistical and visual
outcome of the results.
Tab. 11: Statistical outcome after different rounds of interaction for scenario 5a
Ticks Minimum Maximum Mean Standard deviation
1 0.2000 0.7000 0.3725 0.1183
2 0.0875 0.7250 0.3932 0.1205
3 0.1328 0.7696 0.3958 0.1340
4 0.1394 0.6844 0.3979 0.1197
5 0.1767 0.7694 0.4063 0.1263
10 0.1104 0.7144 0.3828 0.1250
20 0.0717 0.7018 0.3928 0.1267

49
Fig. 13: Opinion distribution after different amount of interaction for scenario 5a

50
5 Discussion and conclusions
The subject of this thesis was to use opinion dynamics in combination with a spatial context
in order to simulate opinion formation processes for spatial decision making in spatial
planning. The previous chapters dealt with issues on the acquisition of knowledge on opinion
forming processes. The discussion exposed the results of the model against the background of
the finding in the literature review. In addition, it is discussed in how far the used methods
were suitable in receiving the results. Further, strong points and limitations of the model are
addressed. A summary of all findings in the background of the research question is written as
last step in the conclusion.
5.1 Discussion
It was assumed that spatial planning is a highly complex process in which actor
communication and opinion formation are essential in achieving legitimacy for certain
planning decisions and that this processes could be simulated within a computer based model
environment. Findings in the literature review described that existing simulation models for
opinion dynamics failed so far in considering space as an important component in the
simulation of opinion formation processes (Ligtenberg & Bregt, 2014) and that in multi-actor
spatial planning the role of opinions were yet narrowly included. In the model simulation
spatial distances and the composition of participating groups of actors wield considerable
influence on the opinion of actors. This influence could particularly be observed during the
interaction under open-minded conditions. Especially the change of spatial distances had a
major effect on the strength of the opinions for or against certain locations as siting location
for a wind turbine. This result makes obvious that space may not be ignored from models
whose attempt is the simulation of opinion dynamics for the purpose of spatial decision
making. Ignoring people’s spatial interest and preferences from decision making processes in
spatial planning would lead to conflicts in actor communication and distorted result. Related
to the results of the model simulations the findings in literature assumed similarity of opinions
as precondition (Kaur et al., 2013) for interaction seems reasonable.
The elaborated approach simulated opinion dynamics under consideration of spatial aspects.
Based on the simulation results this seemed a reasonable approach to cope with the growing
amount of actors with divergent interests as well as the time stage in which participation
starts. Those were identified by Geertman (2006) as two of three reasons for growing
complexity in spatial planning. In literature findings was described that a simulation model
should be kept to simple and non-complex (Hegselmann & Krause, 2002). This, however,
restricted the model to major limitations in the integration of overmuch fields of policy. The
assumption that actors are influenced by both, social and spatial condition was approved by
findings in the literature review (Kaur et al., 2013; Ligtenberg & Bregt, 2014). Opinion
formation can indeed be considered as an evolutionary process in which opinions are
influenced by others. It is agreed that described difficulty by Ligtenberg and Bregt (2014)
about neglected spatial influence of opinions in OD-models is justified, since the results of

51
this study show obvious that spatial aspects have a major impact on the distribution of
opinions.
The simulation of preferences and beliefs however, was restricted to the assigned values by
the model implementer. The current model results are rather descriptive. In addition, the
model results are based on a subjective perception. This means that the results of the model
are based on the individual meaning that was attributed to the characteristics of each group of
actors. Social perception in particular provides scope for different perceptions and personal
valuations. Findings in literature (Habermas & Habermas, 1989; Jager, Janssen, De Vries, De
Greef, & Vlek, 2000) reinforced the assumption that opinions and communication are
subjectively perceived and dependent on our interpretation. However, due to this reasons
validation of the model remains problematic since it could not be overcome that the model
lacked connection to a real world scenario. Therefore, the model might not be considered as
useful to predict a possible future. Rather, it can be used to simulate, experiment, and learn
from the outcomes under certain conditions, since different assigned properties in the
beginning of the simulation lead to different results.
The simulation with the implemented model shows certain strength and weaknesses.
Weaknesses are discussed together with limitations later in this section. The model can easily
be extended by additional group of actors and influencing factors. However, it should be
considered that this might increase the complexity of the model. But, the implemented model
provides the opportunity to explore the behaviour under different conditions quite easily, what
makes it a strong tool for the investigation of opinion formation under various conditions.
This is meaningful as it comes to explore opinion distribution and the communication of
preferences under multi-actor processes. This is an important condition in current spatial
planning as it was described by Van der Valk (2002). Agent-based models were described as
opportunity to reproduce the social interaction of human networks in their spatial
environment. The implementation of an opinion dynamics model including both a social and a
spatial component might be seen as quite new. The results are a model addressing both social
and spatial preferences in decision making processes. Since individual opinions of agent’s are
dynamic the degree of influence on the opinion also depends on two main issues, the opinions
of the other linked agents as well as the time (tick) during the model run in which they are
linked together. The number of interactions is important since each tick influences the agents
in their opinion to a certain degree from the beginning of the model run.
Even though the actors in the model of this research were assigned to one out of three distinct
groups, actors have incomplete knowledge and might be seen as autonomous. In the
beginning of the simulation actors are part of a social network. However, they are not aware
about the opinions and preferences of others and adapt their knowledge in the course of the
model simulation. The approach and the consideration of others opinions as well as the
acquisition of new calculated opinions for further negotiation endowed actors with adaptive
learning capacity. This adaptive capability was described by Billari (2006) as one of the four
main building blocks for the developing of an ABM. The others (object of simulation, agent
population, and the interaction paradigm among agents) have been described and

52
implemented within the study. This confirms that a model in an ABM approach is useful to
simulate mutual influence on the opinions between multiple agents.
The model results about the distribution of agent’s opinions, demonstrate that consensus
building is among others highly related to the openness of the agents. That more open-minded
an agent is that faster consensus is reached by a high amount of deliberation. That agrees with
the description by Kaur et al. (2013), that consensus is reached by continuous influence from
each other. The exerted influence, however, that could be observed during the first two
interactions was quite high. Since actors were randomly linked to each other, this seems not to
be realistic and applicable for the real world. The influence is rather based on the outcome of
mathematical calculation and less on the logic of arguments. Generally, the distribution and
the influence of opinions in the model does not follow most of the conditions by Schmidt
(2010) which he assumed as important for decision making and consulting according to the
theory of communicative action by Habermas (1991). A shift from random influence to
continuous influence that is based on logical arguments would require changes in the model
structure. A parameter that links agents to each other based on spatial distance and opinion
difference might be introduced. Here, agents that are spatially and socially more close to each
other would be linked together more frequently. The extent to which agents are influenced in
these communicative processes is based on four questions that should be considered in an
argumentative pattern. According to Kemmis and McTaggart (2005) these four questions ask:
What is comprehensible to agents?
What is true in the light of agents own knowledge?
What do agents themselves regard as sincerely and truthfully stated?
What agents themselves regard as morally right and appropriate in terms of their
individual and mutual judgment about what it is right, proper, and prudent to do under
the circumstances in which they find themselves?
These questions offer a good starting point for further research on argumentative patterns that
describe continuous influence based on logical arguments.
In this research agent-based modelling seems a feasible approach for the simulation of
opinion dynamic processes under consideration of spatial and social aspects. The downscaling
from real world scenario to a model environment seemed a feasible method in order to choose
for decent values and variables. The description of the whole model concept according to the
ODD-protocol (Grimm et al., 2010) was perceived as good choice, since it provides a detailed
overview about model intentions by clear and simple structure. Using the ODD-protocol was
beneficial for a systematic and simple approach. This was consistent with assumed conditions
by Kaur et al. (2013) for the simulation of opinion dynamics. The experience from this
approach is that it was beneficial to keep track about all important issues that play a role for
the model implementation quite easily. Further, it provides a high amount of transparency.
This enables the reader to reconstruct steps and decisions that have been taken during the
process without any big effort. The approach of Ligtenberg and Bregt that was chosen for
simulation could be implemented in the NetLogo environment and showed distinct results that

53
could be interpreted. NetLogo as simulation software is restricted to a short but powerful
language. During the implementation of table structures and loops in NetLogo were identified
as inconvenient and difficult to implement if there is only little experience with this software.
In addition NetLogo suffers from a lacking support in relevant internet forum, since its user
group is relatively small.
In the scope of the time limit and the described extent of the research the model works
flawless and showed expected results. However, the model contains weak points by being
unmindful of certain important factors that were not included due to time limitations and
complexity reasons. Three main weaknesses were identified. Firstly, it should be considered
that under real conditions the actors and their opinions and participation is much more
diverse. Here, the final model was limited to three groups of actors. Per scenario all actors
were tested with the same social distance threshold. It is assumed that in a real world scenario
this interaction is far more complex. Secondly, the model only included distances and land-
use as influencing factors on actors’ individual initial opinion. In a real world scenario other
important factors like for instance costs, soil conditions or cultural values are expected to have
a high impact in influencing the opinions of actors. Lastly, due to the quite low resolution of
25 x 25 m the model contained of approximately 17.400 cells, which required a huge amount
of computational power by a large amount of actors. By assigning groups of actors the
computational power could be reduced. However, this led to the fact that far less cells were
occupied by individual actors. This led to irregular distribution of the actors within the model
environment what caused a bias of the results.
The model might find a practically application in the future in the simulation of opinion
formation and communication between residents that are affected by certain spatial planning
processes. However, even if the model showed capacity to simulate the complexity of opinion
dynamics under consideration of social and spatial influence the model is still far off from
being realistic. Therefore, too many important factors that should be considered for opinion
forming processes are not implemented in the model. Agents in the model are restricted to
only several pre-defined opportunities for action which are established within pre-defined
code. This means, that “real-communication” will never take place. Within the model the
influence of agent’s on another depends on the strength of the pre-defined values in the source
code. This does not agree with Habermas and Habermas (1989) who assumes the strength of
an argument as a main factor for opinion formation. In addition, the people’s perceptions and
opinions in the real world are much more diverse as it could be simulated within a model.
Within the model individual opinions are rather individual opinions of similar groups of
actors instead of individual opinions of individuals. This simplification of model agents is one
major reason why the model outcomes are not realistic for the real world. Another one is that
actions of agents are according to the code purely rational. This means that unexpected or
spontaneous behaviour is not simulated and has no influencing effect on the actors opinions
even though this also belongs to a realistic social mechanism as described by Hedström and
Ylikoski (2010).
The named limitations of the model might be broader adapted by using further research to
make the concept more suitable. The influence on opinions could be further elaborated by

54
considering additional factors like for instance costs, soil conditions, or cultural value. On the
one hand, this would make the model results more realistic. On the other hand, this would
lead to much larger complexity of the model. Here, the decision is a balancing act between the
usefulness of the model on the one and simplicity of the model on the other side. Another
improvement might be received by ensuring that all buildings are occupied by residents. Due
to reasons of computational power, the model currently assigns an only a small amount of
actors to one cell of land-use type buildings. Since there are several small farm buildings
within the area, some cells with land-use type building are not occupied by agents. By not
considering these cells the distribution of opinions may become distorted. A third approach to
make the model results more realistic could be achieved by survey about real opinions and
preferences of real world actors. Even though this might make the model far more complex
and assumes more computational power that is needed, might this approach supply results that
are more close to realistic conditions. The scope of this research was limited to the
investigation of opinion forming processes by only using three different actors. Actors were
assigned to certain stereotypes that were implemented in the case study. Due to the lacking
connection to the real world the results were difficult to validate. This agrees with a general
described difficulty in validating socio-spatial systems (Windrum et al., 2007). Improving the
model with the previously described approach, however, might be supportive for the
validation of the results for a real case of spatial decision making. Nevertheless, the results are
an interesting attempt to simulate siting decisions in spatial planning processes by actor
communication that considers social and spatial aspects as influencing factors.
5.2 Conclusion
The main objective of this research was to gain knowledge on opinion formation processes
and to use this knowledge to simulate opinion dynamics for a planning siting problem in an
agent-based model approach. In order to reach this objective four research questions were
formulated that were answered during the approach of the research.
The first research question was about the current role of opinions in multi-actor spatial
planning. Here, the literature review made obvious that the meaning of opinions is yet barely
included. Main problem is the explanation of opinion diffusion in a spatial context. The
influence that is exerted by cultural norms, interaction and mass media is the driver for
individual decision making and is based on social interaction. However, current computer
based models are limited in simulating complex societal processes like opinion formation.
This makes it difficult to include opinions as a meaningful factor into current spatial planning
models. OD-models might be seen as meaningful option to simulate the exchange of and
influence by opinions. However, an important factor of spatial planning models and that is
currently missing in OD models is a missing spatial component.
The second research question asked how opinion formation and dynamics could be
formalized into a logical set of equations. It is of high importance to follow a clear and
distinct structure for the formalization of real world scenarios into equations that can be used
as input values for simulation. Small increases in the quantity of model factors have already a

55
large increasing impact on model complexity. It might be interesting to explore the model
under more complex conditions. The fragmentation of agents in more diverse groups might be
one interesting approach. In addition, the consideration of more diverse land-use types, cost
aspects, or soil conditions might be interesting aspects to make the model conditions more
complex. However, this would extend the scope of time of this research. Therefore, it is
important to thoroughly consider about the factors and variables that have to be included into
the model. The model results, however, show obviously that spatial planning is far more
complex and opinion formation cannot easily be simulated by equations that are only based
on some few factors. The notation of the model approach according to the ODD-protocol is
perceived as beneficial, since it enables reader and implementer to understand certain decision
and provides good starting points for criticism.
The third research question asked how these set of equations could be simulated in an agent-
based model. Agent-based modelling provides different group of agents with the capacity to
learn from and adapt to the opinions of others. Here, it is important that actors collate the
differences between their own opinions and those of others. The extent, however, to which
agent-based models can include important influencing factors for opinion formation is
limited, since each additional added factor raises the complexity of the model and requires
more computational power. This entails that the simulation of opinion dynamics with ABMs
is less useful to represent the whole complexity of social interaction and opinion forming
processes. Rather, it enables the user to explore and understand potential influence on
opinions some few factors exert on each other. This understanding might be useful to put
forward new theory on opinion forming processes.
Research question four asked about the added value of this approach to the current
understanding of land use/planning dynamics. The approach is still far away from being
realistic. This makes validation of the results still difficult. Valid validation could only be
reached in relation to findings in literature and the functioning of the implemented model.
Since model results were lacking in relationship to the real world, results were rather
described than validated. This coincides with a general problem for the validation of complex
adaptive systems. However, the approach demonstrates obviously the dynamics of actor’s
opinions. Actors are able to change their opinions by learning capacity and self-adaptation in
the course of time. It adds value to the current understanding of planning dynamics by the
consideration of space as an important factor. In the model results it has been shown, that this
is in spatial planning indeed necessary for the simulation of opinions dynamics.
In the course of this research some weaknesses were found that might be researched in future
studies. Firstly, it might be investigated if the inclusion of other important factors of common
spatial planning would make the whole model more realistic. In addition, the group of actors
should be extended to a larger amount of people with different opinions and preferences. This
also requires further abilities for communication. Further, it could be investigated if actors
could negotiate my means of the logic of an argument. However, for all further research, it is
important to keep in view the scope of complexity.
Finally, it has to be said, that complexity and dynamics are opinion properties which make it
already difficult to understand issues of opinion formation and opinion change. Even harder it

56
becomes if those processes should be simulated and validated for spatial planning process.
The scope of this research was only a small step in understanding opinion dynamics in a
spatial context. The complexity of opinions also includes opinion change over time by
changing environmental factors. It would be a giant step forward towards realistic conditions
and model validity, if future models could include these changes and the logic of arguments
within their simulation.

57
6 References
Acemoglu, D., & Ozdaglar, A. (2011). Opinion dynamics and learning in social networks. Dynamic
Games and Applications, 1(1), 3-49.
Ackerman, B., & Fishkin, J. S. (2002). Deliberation day. Journal of Political Philosophy, 10(2), 129-
152.
Alvarez, R. M., & Brehm, J. (2002). Hard choices, easy answers: Values, information, and American
public opinion: Princeton University Press.
Aubert, V. (1963). Competition and dissensus: two types of conflict and of conflict resolution. Journal
of Conflict Resolution, 26-42.
Axelrod, R. M. (1997). The complexity of cooperation: Agent-based models of competition and
collaboration: Princeton University Press.
Barabas, J. (2004). How deliberation affects policy opinions. American Political Science Review,
98(04), 687-701.
Barber, B. R. (2003). Strong democracy: Participatory politics for a new age: Univ of California
Press.
Beer, S. (1975). Platform for change: a message from Stafford Beer: John Wiley and Sons.
Beggan, J. K., Messick, D. M., & Allison, S. T. (1988). Social values and egocentric bias: Two tests of
the might over morality hypothesis. Journal of Personality and Social Psychology, 55(4), 606.
Billari, F. C. (2006). Agent-based computational modelling: applications in demography, social,
economic and environmental sciences: Taylor & Francis.
Bousquet, F., & Le Page, C. (2004). Multi-agent simulations and ecosystem management: a review.
Ecological modelling, 176(3), 313-332.
Brockner, J. (1996). Understanding the interaction between procedural and distributive justice: The
role of trust.
Bruno, G. G., A. ; Sgalambro, A. (2010). An Agent-Based Framework for modeling an solving
location problems. TOP, 18(1), 81-96.
Chambers, S. (2003). Deliberative democratic theory. Annual review of political science, 6(1), 307-
326.
Cilliers, P. (2005). Complexity, deconstruction and relativism. Theory, Culture & Society, 22(5), 255-
267.
Cohen, J. (1989). Deliberation and democratic legitimacy. 1997, 67-92.
Converse, P. E. (1962). The nature of belief systems in mass publics: Survey Research Center,
University of Michigan.
Couclelis, H. (2002). Modeling frameworks, paradigms, and approaches. Geographic Information
Systems and Environmental Modelling, Prentice Hall, London.
Dear, M. (1992). Understanding and overcoming the NIMBY syndrome. Journal of the American
Planning Association, 58(3), 288-300.
Deffuant, G., Neau, D., Amblard, F., & Weisbuch, G. (2000). Mixing beliefs among interacting
agents. Advances in Complex Systems, 3(01n04), 87-98.
Druckman, J. N. (2001). The implications of framing effects for citizen competence. Political
Behavior, 23(3), 225-256.
Durkheim, E. (2014). The rules of sociological method: and selected texts on sociology and its
method: Simon and Schuster.
Eder, K. (2006). The public sphere. Theory, culture & society, 23(2-3), 607-611.
Engelen, G., & White, R. (2008). Validating and calibrating integrated cellular automata based models
of land use change The Dynamics of Complex Urban Systems (pp. 185-211): Springer.
Faludi, A. (1973). A reader in planning theory (Vol. 5): Pergamon Press Oxford.
Fishkin, J. (2009). When the people speak: Deliberative democracy and public consultation: Oxford
University Press.
Fishkin, J. S. (1991). Democracy and deliberation: New directions for democratic reform (Vol. 217):
Cambridge Univ Press.
Forester, J. (1999). The deliberative practitioner: Encouraging participatory planning processes: Mit
Press.

58
Fortunato, S. (2005). On the consensus threshold for the opinion dynamics of Krause–Hegselmann.
International Journal of Modern Physics C, 16(02), 259-270.
Fortunato, S., Latora, V., & Marchiori, M. (2004). Method to find community structures based on
information centrality. Physical Review E, 70(5), 056104.
Galam, S. (2012). Sociophysics: a physicist's modeling of psycho-political phenomena: Springer
Science & Business Media.
Geertman, S. (2006). Potentials for planning support: a planning-conceptual approach. Environment
and Planning B: Planning and Design, 33(6), 863-880.
Gerber, M., Bächtiger, A., Fiket, I., Steenbergen, M., & Steiner, J. (2014). Deliberative and non-
deliberative persuasion: Mechanisms of opinion formation in EuroPolis. European Union
Politics, 15(3), 410-429. doi: 10.1177/1465116514528757
Gilbert, N., & Troitzsch, K. (2005). Simulation for the social scientist: McGraw-Hill International.
Goidel, R. K., Freeman, C. M., Procopio, S., & Zewe, C. F. (2008). Who Participates in the “Public
Square” and Does It Matter? Public Opinion Quarterly, 72(4), 792-803. doi:
10.1093/poq/nfn043
Goldstone, R. L., & Janssen, M. A. (2005). Computational models of collective behavior. Trends in
Cognitive Sciences, 9(9), 424-430. doi: http://dx.doi.org/10.1016/j.tics.2005.07.009
Green, S., Hurst, L., Nangle, B., & Cunningham, P. (1997). Software agents: A review: Trinity
College Dublin, Department of Computer Science.
Grimm, V., Berger, U., DeAngelis, D. L., Polhill, J. G., Giske, J., & Railsback, S. F. (2010). The ODD
protocol: a review and first update. Ecological modelling, 221(23), 2760-2768.
Grus, L., Crompvoets, J., & Bregt, A. (2010). Spatial data infrastructures as complex adaptive
systems. International Journal of Geographical Information Science, 24(3), 439-463.
Habermas, J. (1987). The theory of communicative action (Volume 2). Boston: Beacon.
Habermas, J. (1991). The structural transformation of the public sphere: An inquiry into a category of
bourgeois society: MIT press.
Habermas, J. (1996). Die Einbeziehung des Anderen: studien zur politischen theorie: Suhrkamp
Frankfurt am Main.
Habermas, J., & Habermas, J. (1989). The theory of communicative action (Vol. 2): Beacon press.
Hedström, P. (2005). Dissecting the social: On the principles of analytical sociology: Cambridge
University Press Cambridge.
Hedström, P., & Ylikoski, P. (2010). Causal mechanisms in the social sciences. Annual Review of
Sociology, 36, 49-67.
Hegselmann, R., & Krause, U. (2002). Opinion dynamics and bounded confidence models, analysis,
and simulation. Journal of Artificial Societies and Social Simulation, 5(3).
Hegselmann, R., & Krause, U. (2005). Opinion dynamics driven by various ways of averaging.
Computational Economics, 25(4), 381-405.
Holland, J. H. (1992). Complex adaptive systems. Daedalus, 17-30.
Holland, J. H. (2006). Studying complex adaptive systems. Journal of Systems Science and
Complexity, 19(1), 1-8.
Innes, J. E., & Booher, D. E. (1999). Consensus building and complex adaptive systems: A framework
for evaluating collaborative planning. Journal of the American Planning Association, 65(4),
412-423.
Itami, R. M. (1994). Simulating spatial dynamics: cellular automata theory. Landscape and urban
planning, 30(1), 27-47.
Jager, W. (2000). Modelling consumer behaviour. Inhoud ISSN 0033-3115, 529.
Jager, W., Janssen, M., De Vries, H., De Greef, J., & Vlek, C. (2000). Behaviour in commons
dilemmas:< i> Homo economicus</i> and< i> Homo psychologicus</i> in an ecological-
economic model. Ecological economics, 35(3), 357-379.
Jennings, M. K. (1992). Ideological thinking among mass publics and political elites. Public Opinion
Quarterly, 56(4), 419-441.
Katz, E. (1992). On Parenting a Paradigm: Gabriel Tarde\'s Agenda for Opinion and Communication
Research. International Journal of Public Opinion Research, 4, 80-86.
Kaur, R., Kumar, R., Bhondekar, A. P., & Kapur, P. (2013). Human opinion dynamics: An inspiration
to solve complex optimization problems. Sci. Rep., 3. doi: 10.1038/srep03008

59
http://www.nature.com/srep/2013/131021/srep03008/abs/srep03008.html#supplementary-information
Kemmis, S., & McTaggart, R. (2005). Communicative action and the public sphere. Denzin, NK &
Lincoln, YS (red.), The Sage handbook of qualitative research, 3, 559-603.
Kiesling, E., Günther, M., Stummer, C., & Wakolbinger, L. M. (2012). Agent-based simulation of
innovation diffusion: a review. Central European Journal of Operations Research, 20(2), 183-
230.
Kim, J., Wyatt, R. O., & Katz, E. (1999). News, Talk, Opinion, Participation: The Part Played by
Conversation in Deliberative Democracy. Political Communication, 16(4), 361-385. doi:
10.1080/105846099198541
Kleefmann, F. (1984). Planning als zoekinstrument: ruimtelijke planning als instrument bij het
richtingzoeken: Vuga Den Haag.
Klepinger, M. (2007). Michigan land use guidelines for siting wind energy systems. Extension Bulletin
WO-1053. Michigan State University Extension. October.
Knight, J., & Johnson, J. (2011). The priority of democracy: political consequences of pragmatism:
Princeton University Press.
Landemore, H., & Mercier, H. (2012). Talking it out with others vs. deliberation within and the law of
group polarization: Some implications of the argumentative theory of reasoning for
deliberative democracy. Análise Social, 205(4), 910-934.
Latane, B. (1981). The psychology of social impact. American psychologist, 36(4), 343.
Laurian, L. (2009). Trust in planning: Theoretical and practical considerations for participatory and
deliberative planning. Planning Theory & Practice, 10(3), 369-391.
Ligmann-Zielinska, A., & Jankowski, P. (2007). Agent-based models as laboratories for spatially
explicit planning policies. Environment and Planning B: Planning and Design, 34(2), 316.
Ligtenberg, A. (2006). Exploring the use of multi-agent systems for interactive multi-actor spatial
planning: Wageningen Universiteit.
Ligtenberg, A., Beulens, A., Kettenis, D., Bregt, A. K., & Wachowicz, M. (2009). Simulating
knowledge sharing in spatial planning: an agent-based approach. Environment and planning.
B, Planning & design, 36(4), 644.
Ligtenberg, A., & Bregt, A. K. (2014). Simulating Opinion Dynamics in Land Use Planning Advances
in Social Simulation (pp. 271-282): Springer.
Ligtenberg, A., Bregt, A. K., & Van Lammeren, R. (2001). Multi-actor-based land use modelling:
spatial planning using agents. Landscape and Urban Planning, 56(1), 21-33.
Ligtenberg, A., van Lammeren, R. J., Bregt, A. K., & Beulens, A. J. (2010). Validation of an agent-
based model for spatial planning: A role-playing approach. Computers, environment and
urban systems, 34(5), 424-434.
Ligtenberg, A., Wachowicz, M., Bregt, A. K., Beulens, A., & Kettenis, D. L. (2004). A design and
application of a multi-agent system for simulation of multi-actor spatial planning. Journal of
Environmental Management, 72(1), 43-55.
Luhmann, N. (1995). Social systems: Stanford University Press.
Macal, C. M., & North, M. J. (2010). Tutorial on agent-based modelling and simulation. J of Sim, 4(3),
151-162.
Martins, A. C. (2008). Continuous opinions and discrete actions in opinion dynamics problems.
International Journal of Modern Physics C, 19(04), 617-624.
Mäs, M., Flache, A., & Helbing, D. (2010). Individualization as driving force of clustering phenomena
in humans. PLoS computational biology, 6(10), e1000959.
Myers, C. D. (2012). Interests, Information and Minority Influence in Deliberation.
Niazi, M., & Hussain, A. (2011). Agent-based computing from multi-agent systems to agent-based
models: a visual survey. Scientometrics, 89(2), 479-499.
Nowak, A., Szamrej, J., & Latané, B. (1990). From private attitude to public opinion: A dynamic
theory of social impact. Psychological Review, 97(3), 362.
Parker, D. C., Manson, S. M., Janssen, M. A., Hoffmann, M. J., & Deadman, P. (2003). Multi-agent
systems for the simulation of land-use and land-cover change: a review. Annals of the
association of American Geographers, 93(2), 314-337.
Phipps, M., & Langlois, A. (1997). Spatial dynamics, cellular automata, and parallel processing
computers. Environment and Planning B, 24, 193-204.

60
Powell, N. J. (1951). Anatomy of public opinion.
Price, V., & Neijens, P. (1998). Deliberative polls: toward improved measures of “informed” public
opinion? International Journal of Public Opinion Research, 10(2), 145-176.
Rilling, J. K., & Sanfey, A. G. (2011). The Neuroscience of Social Decision-Making. Annual Review
of Psychology, 62(1), 23-48. doi: doi:10.1146/annurev.psych.121208.131647
Rotmans, J. (2005). Societal innovation: between dream and reality lies complexity.
Rousseau, D. M., Sitkin, S. B., Burt, R. S., & Camerer, C. (1998). Not so different after all: A cross-
discipline view of trust. Academy of management review, 23(3), 393-404.
Salgado, M., & Gilbert, N. (2013). Emergence and Communication in Computational Sociology.
Journal for the Theory of Social Behaviour, 43(1), 87-110. doi: 10.1111/jtsb.12004
Samsura, D., van der Krabben, E., & Van Deemen, A. (2010). A game theory approach to the analysis
of land and property development processes. Land Use Policy, 27(2), 564-578.
Sánchez, J. R. (2004). A modified one-dimensional Sznajd model. arXiv preprint cond-mat/0408518.
Sawyer, R. K. (2005). Social emergence: Societies as complex systems: Cambridge University Press.
Schmidt, M. G. (2010). Demokratietheorien: Eine Einführung: Springer.
Seligman, A. B. (2000). The problem of trust: Princeton University Press.
Senecah, S. L. (2004). The trinity of voice: The role of practical theory in planning and evaluating the
effectiveness of environmental participatory processes. Communication and public
participation in environmental decision making, 13-33.
Singh, M. P., Rao, A. S., & Georgeff, M. P. (1999). Formal methods in DAI: Logic-based
representation and reasoning. Paper presented at the Multiagent systems.
Smith, S., & Guthrie, E. R. (1921). Social psychology.
Sobkowicz, P. (2009). Modelling opinion formation with physics tools: Call for closer link with
reality. Journal of Artificial Societies and Social Simulation, 12(1), 11.
Stauffer, D. (2002). Sociophysics: the Sznajd model and its applications. Computer physics
communications, 146(1), 93-98.
Stauffer, D. (2005). Sociophysics simulations II: opinion dynamics. arXiv preprint physics/0503115.
Strang, D., & Soule, S. A. (1998). Diffusion in organizations and social movements: From hybrid corn
to poison pills. Annual review of sociology, 265-290.
Sturgis, P., Roberts, C., & Allum, N. (2005). A Different Take on the Deliberative Poll Information,
Deliberation, and Attitude Constraint. Public Opinion Quarterly, 69(1), 30-65.
Suo, S., & Chen, Y. (2008). The dynamics of public opinion in complex networks. Journal of
Artificial Societies and Social Simulation, 11(4), 2.
Surowiecki, J. (2005). The wisdom of crowds: Anchor.
Sznajd-Weron, K., & Sznajd, J. (2000). Opinion evolution in closed community. International Journal
of Modern Physics C, 11(06), 1157-1165.
te Brömmelstroet, M., & Bertolini, L. (2008). Developing land use and transport PSS: Meaningful
information through a dialogue between modelers and planners. Transport Policy, 15(4), 251-
259.
Tilly, C. (2005). Trust and rule: Cambridge University Press.
Tobler, W. R. (1970). A computer movie simulating urban growth in the Detroit region. Economic
geography, 234-240.
Van der Valk, A. (2002). The Dutch planning experience. Landscape and Urban Planning, 58(2), 201-
210.
Van Lange, P. A. (1999). The pursuit of joint outcomes and equality in outcomes: An integrative
model of social value orientation. Journal of Personality and Social Psychology, 77(2), 337.
van Voorn, G., Ligtenberg, A., & ten Broeke, G. (2014). A spatially explicit agent-based model of
opinion and reputation dynamics. Paper presented at the Proceedings of the Social Simulation
conference (SSC'14).
Vonk, G. A. (2006). Improving Planning Support: The use of planning support systems for spatial
planning: KNAG/Netherlands Geographical Studies.
Wegener, M. (2001). New spatial planning models. International Journal of Applied Earth
Observation and Geoinformation, 3(3), 224-237.
Wegener, M. (2004). Overview of land-use transport models. Handbook of transport geography and
spatial systems, 5, 127-146.

61
Weisbuch, G. (2004). Bounded confidence and social networks. The European Physical Journal B-
Condensed Matter and Complex Systems, 38(2), 339-343.
Weiss, G. (1999). Multiagent systems: a modern approach to distributed artificial intelligence: MIT
press.
White, H. C., Boorman, S. A., & Breiger, R. L. (1976). Social structure from multiple networks. I.
Blockmodels of roles and positions. American journal of sociology, 730-780.
Windrum, P., Fagiolo, G., & Moneta, A. (2007). Empirical validation of agent-based models:
Alternatives and prospects. Journal of Artificial Societies and Social Simulation, 10(2), 8.
Wooldridge, M., & Jennings, N. R. (1995). Intelligent agents: Theory and practice. The knowledge
engineering review, 10(02), 115-152.
Wu, F., & Huberman, B. A. (2004). Social structure and opinion formation. arXiv preprint cond-
mat/0407252.
Xia, H., Wang, H., & Xuan, Z. (2011). Opinion Dynamics.
Zapatha, M., & Hopkins, L. (2007). Engaging the future: forecasts, scenarios, plans and projects.
Lincoln Institute of Land Policy, Cambridge, Massachusetts.

62
7 Appendix
Rules of the OD model of Ligtenberg and Bregt (2014):
Opinion O Opinion of an agent is in domain [0,1],
with 0 as maximum negative opinion
Total num. agents N
Agents k, l
Land-use g
Time t t+1 is certain moment in time
Location i, j
Soc. dist. threshold d
Deffuant-Weisbuch
model
x (t+1) = x + µ(x’ –x)
x’(t+1) = x’+µ(x- x’)
Agents only adjust the opinion if
|x-x’| < d
Opinion dynamics in a
social-spatial system
Ok,(t+1) = f(Oi(k,g,t), Qs(k,g,t), Qg(k,g,t))
Oi is individual opinions on certain land-
use;
Qs is the effect of social influence;
Qg is the effect of spatial influence on the
opinion
Social influence
Qsoc(k,g,i,j,t) = ∑ W (l,g,i,j,t) N
t=1
N
Qsoc(k,g,i,j,t) is social influence factor of k,g
at i,j for t;
w(l, g, I, j, t) is Dirac-delta function
Dirac-delta function
w(l, g, I, j, t) { 1 if S(k, l, i, j, t) < d(k, g, i, j, t)
0 otherwise
d(k,i,j,g) is threshold value for agent k to
enter negotiation
Qspak,g,i,j(t+1) is spatial influence factor of
k,g at i,j ;
X= set of cells of the neighbourhood;

63
Spatial influence Qspak,g,i,j(t+1) =
∑ ∑ Ok,x,t K (k=1)
X(x=1)
N
N= |X|*|K|;
Oa,k,l,t are opinions of agent a stored in cell
x
Update d
Qk,g,i,j,t = π*Qsoc(k,g,i,j,t) + (1-π) * Qspak,g,i,j,t
d’k,g,i,j (t+1) = d(k,g,i,j t) * (1-(|Ok,g,i,j,t –Qk,g,i,j,t|)τ)
π is parameter indicating the priority of
social influence vs. spatial influence;
d’k,g,i,j (t+1) is adapted d for k at t +1;
τ is parameter to define resilience of an
agent against adaptation of its opinion
Social distance
S(k,l,i,j,t) = o(k,i,j,t) – o(l,i,j,t)
S(k,l,i,j,t) is social distance;
o(k,i,j,t) is opinion of k about i,j;
o(l,i,j,t) is opinion of l about i,j
Precondition for
opinion update
S(k,l)(i,j)<dki,j
Social distance of agents needs to be
below a social distance threshold
DW adapted for spatial
context
O(t+1)(a,i,j) =O(t)(a,i,j)+ µa (O(t)(a, i, j)- O(t)(b,i,j))
and
O(t+1)(b,i,j) =O(t)(b,i,j)+ µb (O(t)(b, i, j)- O(t)(a,i,j))
µ is agent specific location independent
parameter
Representation of the
spatial environment by
ordered collection of
cells
C=(ci,j,ci+1,j,ci+1,j+1,….,ci+n, j+n)
i,j are indexes that determine the location
of the cell in a lattice;
Each cell represents a discrete part of the
area and contains information about the
state of the environment, here:

64
p(i,g) as agents preference and the opinion
at time t