Issta11
52
Testing Embedded Software John Regehr University of Utah
-
Upload
regehr -
Category
Technology
-
view
4.406 -
download
1
description
slides from John Regehr's keynote at ISSTA 2011
Transcript of Issta11

Testing EmbeddedSoftware
John Regehr
University of Utah

• “Over 15 billion ARM based chips shipped to date”– [ARM web site, 2011]
• “The microcontroller market is forecast to reach over $16 billion worldwide in 2011”– [Microcontroller Market Tracker,
2011]
2

3

Diverse!
4

Diverse!
5
I have 6 pins and 32 bytes
of RAM

Diverse!
6

Diverse!
7

Diverse!
8
I am quad core @ 1.5 GHz and
have a GPU

• Usually there are multiple processors–On-chip networks
– In-device networks
–Distributed systems
• Resource constraints are…– Severe – to minimize unit cost
–Hard – failure if system runs out of…
• Time
• RAM – stack or heap
• Energy9

• Continuously interact with the world through I/O devices–May be little abstraction of HW
–Probably using both interrupt handlers and threads
• Often there are fault tolerance and security requirements
10

• Sensor network → 103–105 LOC
• Modern airplane → 106–107 LOC
• Hybrid vehicle → 107–108 LOC
• How do we get these right?–Mostly testing
11

• Software on many individual processors is small–Permits aggressive analysis and testing
• Constrained domain simplifies testing– Embedded systems are (by definition)
special-purpose devices
12

The “Real System Problem”
• Many interesting embedded codes are proprietary
• Necessary tools may be expensive or nonexistent– Compilers, debuggers, simulators
• May not be able to run it in the lab
• Often lacks specifications and oracles
13

• Consequently, academic embedded work may be…– Forced to use small, contrived examples
–Out of tune with industry
14

• Consequently, academic embedded work may be…– Forced to use small, contrived examples
–Out of tune with industry
15
Solution: Ubiquitous open embedded platforms

Arduino
• Arduino Uno:–8-bit AVR processor @ 16 MHz
–2 KB RAM
–~$30
• Emphasis is on interfacing16

Arduino
• Nice IDE + libraries + C/C++–Minimal abstraction of the embedded
processor
• 18 new books in 2011
17

Arduino
• Nice IDE + libraries + C/C++–Minimal abstraction of the embedded
processor
• 18 new books in 2011
18
• Simulators and model checkers for AVR code exist
• Very few Arduino tool papers exist
• This is a big opportunity

TinyOS
• OS and middleware support for sensor networks– Sensing
–Collection and dissemination
– Localization
• Applications are in nesC, a C dialect19

TinyOS
• “Motes” based on a variety of MCUs–Cost $50 – $200
• Good simulators exist
• There are a few books20

TinyOS
• “Motes” based on a variety of MCUs–Cost $50 – $200
• Good simulators exist
• There are a few books21
• ~100 tool papers
• Many open problems

Android
• OS + middleware for smart phones / tablets–ARM based hardware running Linux
–Much less constrained than motes and Arduino
22

Android
• Application code in Java
• Great tools
• Tons of books
23

Android
• Application code in Java
• Great tools
• Tons of books
24
• < 100 tool papers• Most are very recent• This is not a scary platform

ROS – Robot Operating
System
• Linux-based infrastructure for programming robots
• Primary abstraction is graph of communicating processes– Local and distributed
25

ROS – Robot Operating
System
• Linux-based infrastructure for programming robots
• Primary abstraction is graph of communicating processes– Local and distributed
26
• Very few ROS tool papers exist

• Plenty of other open embedded platforms exist– FreeRTOS
–Contiki
–Pacemaker Challenge
– Etc.
• Embarrassment of riches
• Still, huge room for improvement–Where’s the open automobile?
27

• So, let’s test some embedded software–But what are we testing for?
28

Properties / Oracles
• Temporal safety–Deadlines
–Or just responsiveness
• Memory safety
• Contracts / assertions
• Reference implementation
29

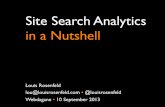
Worst-Case Execution Time
• What is the upper bound on execution time for a piece of code?–We care because the world has deadlines
• Static analysis of WCET is extremely difficult if there is…–A cache
–Preemption
–An aggressive processor
30

31
Conservative WCET
True WCET
Longest observed ET #2
Execution time
Nu
mb
er
of
exe
cuti
on
s
Longest observed ET #1

32
+ printf()=
pthread_attr_setstacksize (&attr, &mystacksize);
HANDLE WINAPI CreateThread(
LPSECURITY_ATTRIBUTES lpThreadAttributes,
SIZE_T dwStackSize,
LPTHREAD_START_ROUTINE lpStartAddress,
LPVOID lpParameter,
DWORD dwCreationFlags,
LPDWORD lpThreadId );

Stack Overflow in TinyOS
33
4 KB

Stack Overflow in TinyOS
34
4 KB
main()

Stack Overflow in TinyOS
35
4 KB
main()
irq 0

irq 1
Stack Overflow in TinyOS
36
4 KB
main()
irq 0

Stack Overflow in TinyOS
37
4 KB
main()
irq 0
irq 1

Stack Overflow in TinyOS
38
4 KB
main()
irq 0
irq 1
• Not the same thing as buffer overflow!
• Type safe language doesn’t solve this problem

Eliminating Stack Overflow
• Testing is hard–Need to drive code to its WC stack depth
– Interrupt coincidences are rare
• Approach: Static analysis of compiled code–Can’t estimate stack depth of source
39

1. Estimate WC stack depth of each sequential flow, handling
– Indirect branches
– Recursion
– Loads into the stack pointer
2. Compute “interrupt preemption graph”
3. Find longest cycle in this graph
40

41
in r24, 0x3f ; r24 <- CPU status
register
cli ; disable interrupts
adc r24, r24 ; carry bit <- prev
interrupt status
eor r24, r24 ; r24 <- 0
adc r24, r24 ; r24 <- carry bit
mov r18, r24 ; r18 <- r24
... critical section ...
and r18, r18 ; test r18 for zero
breq .+2 ; if zero, skip next
instruction
sei ; enable interrupts
ret ; return from function

• Stack analysis tool deployed in the TinyOS distribution
• Results are typically much larger than worst observed stack depths–But, we validated its results by randomly
firing interrupts
42

Need… more… oracles…
43

• TinyOS applications are built using components– Interface
requirements documented but not checked
– Interface misuse often silent
44

• We augmented nesC with contracts–Dynamic checking
reasonable efficient
– Found some long-standing bugs
45

• nesC is not type safe–Memory safety bugs in TinyOS are difficult
• We ported an existing safe C dialect
• Found some otherwise-impossible bugs
• Main problem was getting overhead under control–Whole-program optimization
46

47
Code size
35%
13%
-11%

48
Array Out-of-bounds
Array Out-of-bounds
Reboot
NormalTinyOS
SafeTinyOS
RebuildSoft state
Normal TinyOS:0% average availability
Safe TinyOS:95% average
availability
Increasing Availability

• What about application-level sensornet properties?–All the interesting ones are distributed
• We adapted TOSSIM, a non-cycle-accurate simulator, to be…–A random tester
–A depth-bounded model checker
• Oracles: –Type safety checks
–Application-level properties
49

Application-Level Properties
• Eventually…– Each send buffer is unlocked
–No cycles in the routing tree
–All nodes become part of the collection tree
–All nodes have consistent values
• 6 out of 8 of these properties require global knowledge
50

• Found 12 previously unknown bugs in TinyOS 2.0–10 safety, 2 liveness
• Random testing outperformed depth-bounded model checking– Even after a lot of work on POR
–But required work to shorten long error traces
51

Conclusions
• Open embedded platforms exist– Some have steep learning curves
• Finding oracles is hard
• Generating valid input is hard
• Embedded systems are fun and important and rewarding
52