Introduction to Mechatronics - unitn.itweb.unitn.it/files/imidm_parte7.pdf · Introduction to...
49
Dario Petri An overview of trends and technologies for innovation Introduction to Mechatronics Department of Industrial Engineering Ciclo di Seminari per l’Ingegneria Industriale – 17 Marzo 2015
-
Upload
duonghuong -
Category
Documents
-
view
223 -
download
2
Transcript of Introduction to Mechatronics - unitn.itweb.unitn.it/files/imidm_parte7.pdf · Introduction to...

Dario Petri
An overview of trends and technologies for innovation
Introduction to Mechatronics
Department of Industrial Engineering
Ciclo di Seminari per l’Ingegneria Industriale – 17 Marzo 2015

Outline
• What is mechatronics?
• Role of Mechatronics for Industry and Society
• What is a Mechatronic System
• The core of Mechatronic Systems: the Embedded processing Platform
• Transducers and MEMS
• Annex: M.Sc. Mechatronic Engineering 2

What is Mechatronics ?
3

a synergistic integration and convergence of disciplines
What is mechatronics ?
A definition:
approach aiming at the synergistic integration of mechanics, electronics, control theory, and computer science in order to improve and/or optimize functionality of systems or processes
4

Role of Mechatronics for Industry and Society
5

Where is mechatronics used?
InstrumentsAmbient Assisted Living (AAL)
Robotics
Automotive
Industrial automation Home appliances6

What perspectives for Mechatronics ?
• a key role within the European research and innovation funding programme (2014-20) called Horizon 2020
Horizon 2020 goals:
Responding to the economic crisis to invest in future jobs and growth
Addressing peoples’ concerns about their livelihoods, safety and environment
Strengthening the EU’s global position in research, innovation and technology
7

Excellent science
Industrial leadership
Societal challenges
38%
32%
22%Others: 8%
Total:€ 80 bn
Horizon 2020 priorities
8

Horizon 2020 priorities vs Mechatronics
9
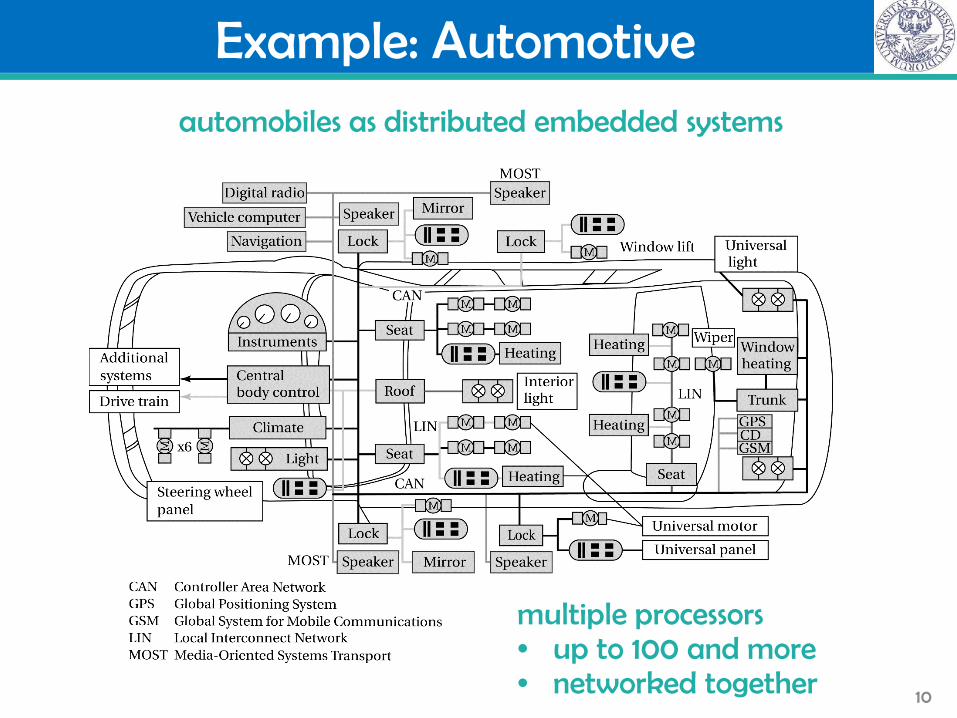
automobiles as distributed embedded systems
multiple processors• up to 100 and more• networked together
Example: Automotive
10

Example: factory of the Future
11

rational management of resources, sustainable development, for the benefit of citizens, companies, institutions
pervasive use of information, mechanical and control technologies for communications, mobility, environment, energy, …
Example: Smart City

Example: Smart Grids
13

Sensors, Actuators,Networks
Performance Database
Environmental Control Energy Efficiency
SecuritySafety
Entertainment
Buildings as Composition of
Subsystems
Example: Smart Home

Example: Ageing and Well-being
Home Care
Inclusive Society Mobility
Health Social Interaction
15

What is a Mechatronic System?
16

General functional overview
sensors
of «external» quantities (related to the environment)
sensorsof «internal» quantities (related to the system itself)
input signal conditioning & interfacing
signals
signals
“embedded” processing
communication
• analog filtering• amplification• A/D conversion
• digital control• digital filtering • parameter estimation• feature extractions• optimization
output signal conditioning & interfacing
• D/A conversion• power amplification
mechanical system actuators
• valves• motors (electric, pneumatic, hydraulic,…)
a feedback system!
• autonomous vehicle• manipulators• assembling lines
• gyroscopes• potentiometers• encoders …
• accelerometers • cameras• sonar …
(MCU, µP, FPGA, PLC, DSP, …)
(gears, axles, …)
17
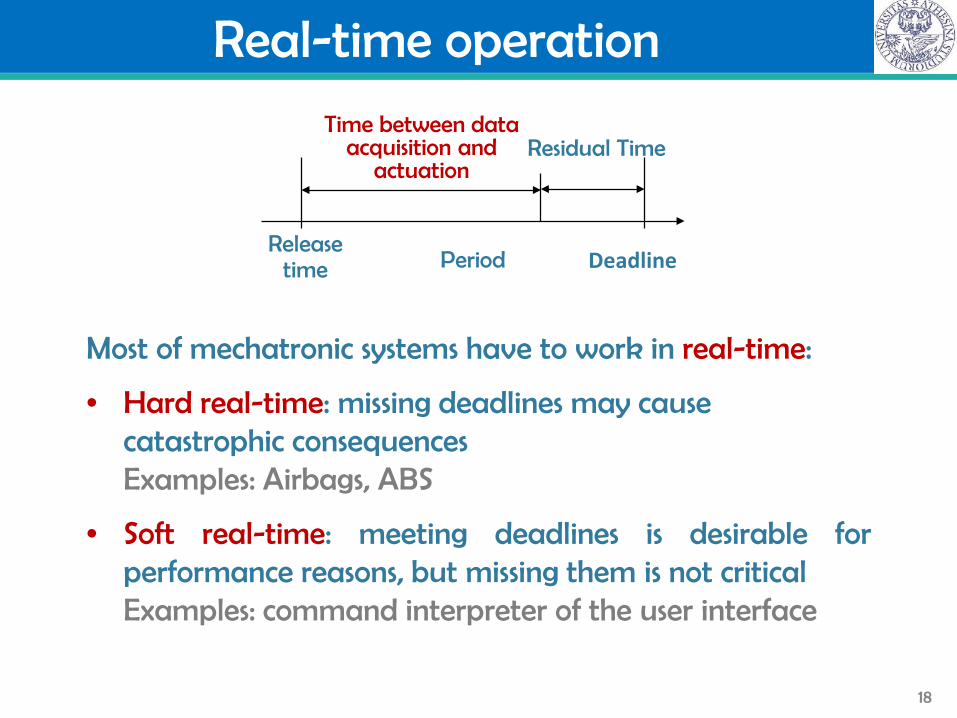
Real-time operation
Most of mechatronic systems have to work in real-time:
• Hard real-time: missing deadlines may cause catastrophic consequencesExamples: Airbags, ABS
• Soft real-time: meeting deadlines is desirable forperformance reasons, but missing them is not criticalExamples: command interpreter of the user interface
Time between data acquisition and
actuationResidual Time
PeriodRelease
time Deadline
18

An excellent example: The RobotThe term has been used for a variety of autonomous mechanical systems.
“A robot is a reprogrammable multi–functional system designed to move materials, parts, tools, or specialized devices through variable programmed motions for the performance of a variety of tasks” (Robotics Institute of America)
Widely accepted definition of robotics: “the science studying the intelligent connection between perception and action”
19
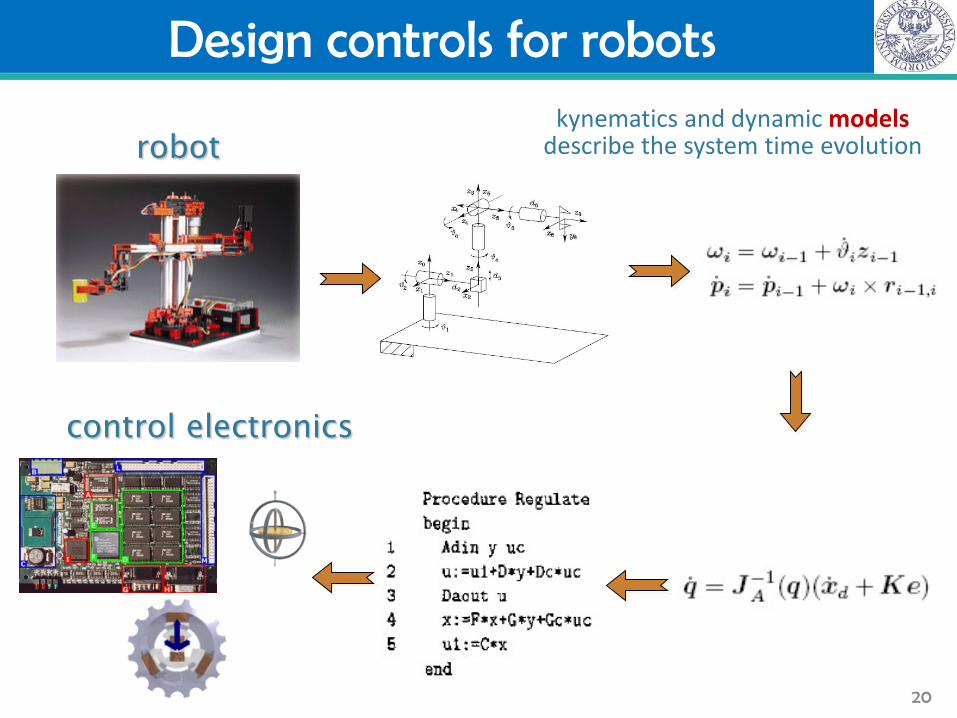
Design controls for robots
robot
control electronics
kynematics and dynamic modelsdescribe the system time evolution
20

The core of Mechatronic Systems:the
"Embedded" Processing Platform
21

Software (Flash)
DC/DC Converter
Power Generator
Power Unit
BB
Radio Unit
Radio
A/DD/A
Other Electronics
sensor
actuator
Sensing Unit
Data AggregationAlgorithms
NetworkProtocols
Link Level
Protocols
Processor
SRAM
Micro-OS and Middleware
Processing Unit
Flash
Location finding
Acc.
Embedded platform
from 10’s of cm3
and 10’s of mW
to 10’s of mm3
and 10’s of µW

The central processing unit (CPU)The CPU consists of:• data section (containing registers and ALU - arithmetic and logic
unit) also known as the datapath• control section, which interprets instructions and effects register
transfers
23

CPU options for Mechatronics
cost
per
form
anc
e
MicroprocessorsEmbeddedprocessors
Microcontrollers
disappearing distinction
Application specific architectures (ASIC)
performance evolution
24

A CPU architecture: ARM A9
25

Increasingly on the Same Chip
Copyright 2003 Mani Srivastava
System-on-Chip (SoC)

Embedded design variables
Embedded systems are computing systems dedicated to an applicationdomain and “embedded” into a technical environment (e.g. car, robot)
Contributions to cost:
• silicon area
• memory (program, data)
• packaging
• hardware design effort
• time-to-market
• software design effort
power consumption
cost
27
Embedded system characteristics
Real-Time Operation• Reactive: computations must occur in response to external events• Correctness is partially a function of time
Small Size, Low Weight• Hand-held electronics and Transportation applications -- weight costs money
Low Power• Battery power for several hours (laptops often last only 2 hours)
Harsh environment• Heat, vibration, shock, power fluctuations, RF interference, lightning, corrosion
Safety- critical operation• Must function correctly and Must not function in correctly
Extreme cost sensitivity• $0.05 adds up over 1,000,000 units
28

Hardware-software co-design
29

Microelectronic evolution: Moore’s law
Gordon Moore: noted that the number of transistors on a chip doubled every 18 to 24 months (1965)
Prediction: semiconductor technology will double its effectiveness every 18 months (strong impact on both CPUs and memories)
161514131211109876543210
1959
1960
1961
1962
1963
1964
1965
1966
1967
1968
1969
1970
1971
1972
1973
1974
1975
LOG 2 O
F THE
NUM
BER
OFCO
MPON
ENTS
PER
INTE
GRAT
ED FU
NCTIO
N
Electronics, April 19, 1965
30

Transistor count growth in CPUs
1,000,000
100,000
10,000
1,000
10
100
11975 1980 1985 1990 1995 2000 2005 2010
8086
80286i386
i486Pentium®
Pentium® Pro
K 1 billion transistors
projected
Pentium® IIPentium® III
Courtesy, Intel
2012 > 1 billion transistors
31

Embedded HW: Moore’s Law
Margarshack03
65 nm1400 Kgates/mm2
45 nm2600 Kgates/mm2
STMicroelectronicsRoadmap
P.Marwedel
18 nm5000 Kgates/mm2
today
atomic radius ∼
30-300 pm

Instruction level parallelism
• Instruction Level Parallelism (IPL): the capability of a CPU to run more instructions at the same time
• the most classic solution: the pipeline
33

The power wall
• design goal (late 1990’s - early 2000’s): drive the clock rate upby increasing parallelism
• this increased the power dissipation of the CPU chip beyond the capacity of inexpensive cooling techniques
34

Power density
Power density too high to keep junctions at low temp

Solution: multi-core CPUs
Sequential App Performance
36

A multi-core CPU: ARM11 MPcore
37

Evolutionof micro-integration
38

Integration of Technologies
3D technology integration: ICT, Nano e Bio
3-D Hyperintegration and Packaging Technologies for Micro-Nano Systems
Proceedings of the IEEE , January 2009

Transducers and MEMS
40

What is a transducer ?
transducer: a device that converts a quantity with a primary form of energy to anotherprimary energy forms: mechanical, thermal, electromagnetic, optical, chemical …
it takes form of:
• sensor (e.g., thermometer): a transducer that acquires information from the “empirical world” providing an electrical signal at its output
• actuator (e.g., heater): a transducer that acts on the “empirical world” converting information into an action
empiricalworld
sensor
actuator
intelligentfeedback
system
41

Transducer examples
Light Sensors• photoconductor:
∆R = f (light level)
• photodiode∆Iλ = f (light level)
Pressure sensors• resistive ∆R = f (pressure)• capacitive ∆C = f (pressure)
42

Micro Electrical Mechanical Systems (MEMS)
Characteristics:• miniaturization (size: 1 µm – 1 mm)• fabricated using micromachining
(technologies derived from µelectronics)• batch fabrication reduces cost
• low power consumption
• new capabilities: micro-analysis and micro-manipulation systems
micro-gears micro-mirrors micro-electrodes
micro-fluidics
43

MEMS in automotive applications
distributed all over the vehicle
44

Ecall
• mandatory in all EU new cars since October 2015
• activated by airbag sensors, send an alarm signal to 112 (emergency call number) with date, time and GPS coordinates of the vehicle
expected cut help delay: about 50%
-2500 dead/year
cost: 50-300 euro

3D imagers
Maneuvering area
Functional scheme
10 m
80 m50 m
• target identification• distance measurements
output
• 3D imagers rely on the measurement of Time-of-Flight (ToF) of optical pulses
• range 1 - 20 m, accuracy of a few cm
46

Autonomous Vehicle
Arnold SchwarzeneggerTotal Recall, 1990
Piero AngelaParma, Jan 2014

M.S. (Laurea Magistrale) in Mechatronic Engineering
classe Mechanical Engineering
48

Comp. Meth. for Mechatronics (6 CFU)Manufacturing Automation (6 CFU)Systems and tech. for D.S.P. (9 CFU)Mech. Design Machine Elem. (9 CFU)Introduction to Electr. Syst. (6 CFU)Elective course* (6 CFU)
Automatic Control (9 CFU)Mechanical Vibrations (6 CFU)Modeling Simul. Mech. Systems (9 CFU)Elective course* (6 CFU)
Robotic Perception and Action (6/9 CFU)Design Control of Product. Proc. (6 CFU)Functional and Smart Materials (6 CFU)Elective course (6 CFU)Elective course (6 CFU)
Modeling design finite elements (6 CFU)Dynamic control vehicles robots (9 CFU)Embedded Systems (9 CFU)Other activities (3 CFU)Final project (15 CFU)
Computer Vision (6 CFU) Distrib. Systems Meas. Autom. (6 CFU)Industrial Robotics (6 CFU)Logistica Gestione Impianti Ind. (6 CFU)Introd. to Electronic Systems* (6 CFU)Quality and Innovation Engin. (6 CFU)
Curriculum Mechanics – Mechatronics Curriculum Electronics - Robotics
1° year 2° year
1°Se
mes
ter
1°Se
mes
ter
2°Se
mes
ter
2°Se
mes
ter
M.S. Mechatronic Engineering
Aerodinamica (6 CFU)Informatica e Programmaz.* (6 CFU)Metodi Progettazione Industriale (6 CFU)
Manifesto 2014-15 (draft)