
Introduction to Kalman Filter and SLAM Ting-Wei Hsu 08/10/30.
50
Introduction to Kalman Filter and SLAM Ting-Wei Hsu 08/10/30
-
date post
20-Dec-2015 -
Category
Documents
-
view
245 -
download
1
Transcript of Introduction to Kalman Filter and SLAM Ting-Wei Hsu 08/10/30.

Introduction to Kalman Filter and SLAM
Ting-Wei Hsu
08/10/30

What is Kalman Filter? (cont.)

What is Kalman Filter? (cont.) What’s used for ?
Tracking missiles Tracking heads/heads Extracting lip motion from video Fitting Bezier patches to points data Lots of computer vision Economics Navigation ……

Basic Idea
z[n] = A + u[n]
Measure1:
State:

Basic Idea
Measure2:
State = ?

Basic Idea (cont.)
Measure from 1 & 2

Kalman Filter Model
z1 z2 z3 z4 z5
x1, σ1
z6
x2, σ2
z7
x3, σ3

Extend to System Model
x = Hθ+w
y = θ

Estimate from Two Distributions If x and y are distributed according to Gaussian PD
F with [E(x) E(y)]T
And covariance matrix
))(()var(
),cov()()|( xEx
x
yxyExyE
)var(
),(cov)var()|var(
2
x
yxyxy

Extend to System Model

Extend to System Model

Extend to System Model
z1 z2 z3 z4 z5
x1, σ1
F z6
x2, σ2
F z7
x3, σ3

Pre-limit of Kalman Filter
Linear dynamical system Markov Chain Zero mean Gaussian noise

Prediction to Correction

System Model
Fk state transition model
wk is the process noise which is assumed to be drawn from a zero mean multivariate normal distribution with covariance Qk
Observation model: vk is the observation noise which is assumed to be zero m
ean Gaussian white noise with covariance Rk
kkkk wxFx 1
kkkk vxHz

System Model
z1 z2 z3 z4 z5
x1, σ1
F
z6
x2, σ2
F
z7
x3, σ3

Predict and Update
Predict Predicted state Predicted estimate covariance
Update innovation or measurement residual
Innovation (or residual) covariance

Predict and Update (cont.)
Update Optimal Kalman gain
Updated state estimate
Updated estimate covariance
http://en.wikipedia.org/wiki/Kalman_filter
kTkkkk
Tkkk
RHPH
HP
1|
1|

Example: 2D PV Model Position-velocity model
u(n): change in velocity
v(n): measurement error

Example: 2D PV Model (cont.)
Process Noise Covariance
Measurement Noise Covariance

EKF-Extended Kalman Filter
Processes to be estimate or measurement is non-linear.
Model:
Predict:

EKF-Extended Kalman Filter
Update:
Transition and observation matrix

Disadvantage of the Extended Kalman Filter Use only first level Taylor series. If the initial estimate of the state is wrong, the
filter may quickly diverge.
Solution: Unsented Kalman filter

SLAM
Simultaneous localization and mapping
Technique used by robots and autonomous vehicles to build up a map within an unknown environment.

SLAM Problem

Overview of the Process
1.Update the current state estimate using the odometry data.
2.Update the estimated state from re-observing landmarks.
3.Add new landmarks to the current state.

Spring Network Analogy

System Model
Fk state transition model
wk is the process noise which is assumed to be drawn from a zero mean multivariate normal distribution with covariance Qk
Observation model: vk is the observation noise which is assumed to be zero m
ean Gaussian white noise with covariance Rk
kkkk wxFx 1
kkkk vxHz

The Matrix
The system state: x
xr, yr , thetar for robot
x1,y1…xn, yn position of each landmark.

The Matrix
Covariance Matrix P
3x3 3x2
2x3

The Matrix
Measurement model : H

The Matrix
Jacobian of H of robot

The Matrix
H for SLAM EKF as landmark number two observed.

The Matrix

The Matrix
Prediction model : A
The Matrix
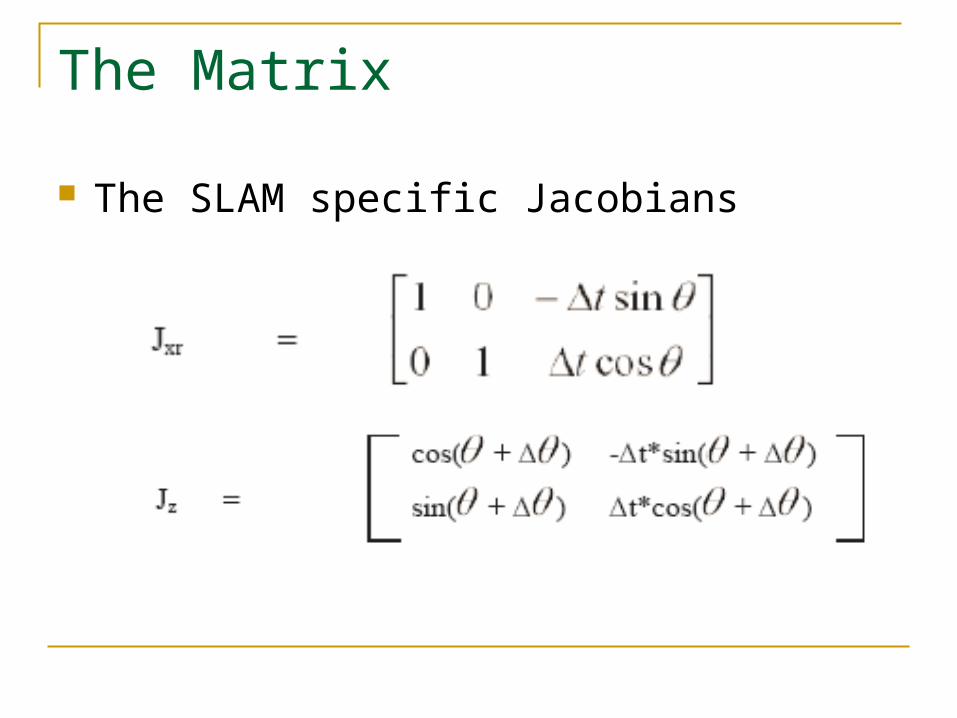
The SLAM specific Jacobians

Step 1: Update current state using the odometry data Update current state using odometry data
Prr is the top left 3 by 3 matrix of P
Update the robot to feature correlation

Step 2.Update the Estimated State from Re-observing Landmarks X = X + K*(z-h)
TT
T
VRVHPH
PHK

The Matrix
Process noise
Measure noise c, d represent the
accuracy of measure device
=

Step 3: Add New Landmarks to Current State X = [X xN yN]T
FastSLAM
Integrates particle filter and extend Kalman Filter.
Cope with non-linear robot models better.

FastSLAM Robot Trajectory

Factoring the SLAM Posterior

Symbol
Θ MAP, consists of collection of features[θ0 θ
1…θn]
st robot post at time t
st = s1, s2, s3…st
zt , nt : measurement feature n at time t
ut : control of vehicle

Fast SLAM Algorithm
zt depend only on st, nt, θnt

Particle Filter in FastSLAM

Step 1. Extend the Path Posterior by Sampling New Poses .
st robot pose
ut contorl

Step 2 Updating the Observed Landmark Estimate
zt sensor measurement
θlandmark

Step 3. Resampling

Step 3. Resampling (cont.)


















