
Introduction to Bayesian tracking - - TU Kaiserslautern Bayesian filtering • Key idea 1:...
44
Introduction to Bayesian tracking Doz. G. Bleser Prof. Stricker Computer Vision: Object and People Tracking
Transcript of Introduction to Bayesian tracking - - TU Kaiserslautern Bayesian filtering • Key idea 1:...

Introduction to Bayesian tracking
Doz. G. BleserProf. Stricker
Computer Vision: Object and People Tracking

• Goal:– Estimate posterior belief or state distribution based on control data
and sensor measurements– Information represented as probability density function
• State: position of robot in corridor• Control data: odometry• Measurements: door sensors
2
Reminder: introductory example

Recursive Bayesian filtering
• Key idea 1: Probability distributions represent our belief about the state of the dynamical system
• Key idea 2: Recursive cycle1. Predict from motion model2. Sensor measurement3. Correct the prediction
…repeat
predict
correct
measure

Outline
• Reminder: Basic concepts in probability• Terminology, notation, probabilistic laws• Bayes filters
4

Joint and Conditional Probability
• Let and denote two random variables:
,
• If and are independent (carry no information about each other) then:
p ,
5

Joint and Conditional Probability: example
• Ideal cube, dice toss: G={2, 4, 6}, A={4, 5, 6}
• ?
• ?
• , ?
• | ?
6

Joint and Conditional Probability: example
• Ideal cube, dice toss: G={2, 4, 6}, A={4, 5, 6}
•
•
• , 4,6
• | , 2 4,6
7
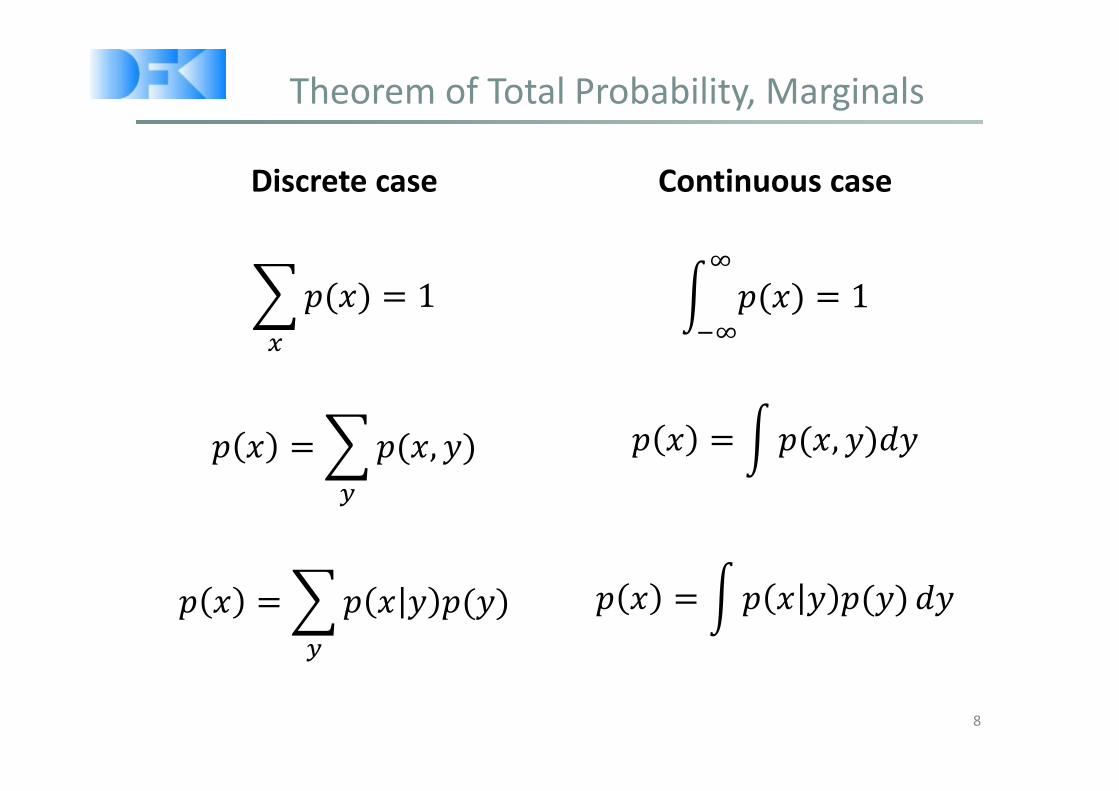
Theorem of Total Probability, Marginals
8
Discrete case Continuous case

Bayes Theorem
• In the context of state estimation:– Assume is a quantity that we want to infer from Think of as state and as sensor measurement
9
Posterior
probability
Generative model: how statevariables cause sensor
measurements
Independent of denoted as normalizer
Important: in this lecture, we will freely use in different equations to
denote normalizers, even if their actual values
differ!

Conditional Independence
• All rules presented so far can be conditioned on an arbitrary random variable, e.g. Z
,, ||
, , |
• Conditional Independence: and are independent, given that is known
,⇔ , , | ,
does not necessarily imply absolute independence10
carries no informationabout , if is known

SA-1
Towards the state estimation problem:terminology, notation, probabilistic laws

Terminology: overview
12
State Measurement model/likelihood
Motion model/transitionprobability
Inference
1tx tx1x 1tx Tx
tz1z 1tz 1tz Tz

State
• The environment or world is considered a dynamical system• The state contains all information that we want to know about the
system• Notation: denotes the state at time • A state is called complete, if it is the best predictor for the future knowledge of past states, measurements, or controls carries noinformation about evolution of the state in the future
• Typical examples of states: – Object pose/velocity in global coordinate system continuous,
dynamic– 3D positions of landmarks continuous, stationary– Whether a sensor is broken or not discrete, dynamic– Sensor biases discrete, stationary
13
Markov chain

State: examples
• Example for people tracking in 2D images
14
t xx
x
( , )t x yx( , , )t x y hx
1 2{ , }t t tx x x
y

State: example
• Object defined by a point in an image– position– velocity– acceleration
Saad Ali and Mubarak Shah, Floor Fields for Tracking in High Density Crowd Scenes, European Conference on Computer Vision (ECCV), 2008.
( , )( , , , )( , , , , , )
t
t
t
x yx y x yx y x y x y
xxx

State: examples
16
• Camera/object pose(rotation, translation)
• Joint angles

Measurements
• Sensor measurements provide noisy (indirect) information about the state of the dynamical system under consideration
• Notation:– denotes a measurement at time – : denotes the set of all measurements acquired from time to
• Typical examples of sensor measurements:– Camera images (pixel‐/feature‐/object‐level)– Inertial measurements– GPS coordinates
17

Control inputs
• Control inputs carry noisy information about the change of thedynamic system under consideration
• Notation: – denotes control data at time – corresponds to the change of the state in time interval 1;– : , , … , denotes sequences of control data
• Typical examples of control inputs:– Velocity: setting the velocity of a robot to 10 cm/s for the duration of 5
seconds suggests that the robot is 50 cm ahead of its pose before– Odometry: odometers measure the revolution of wheels– No input (often the case in visual tracking)
18

State estimation example
• Dynamical system: tracking of billard balls by means of a cameralooking from above (without spin, collision, etc.)
• Pre‐requisite: camera pose known with respect to table
19Courtesy of U. Frese

State estimation example
• Dynamical system: tracking of billard balls by means of a cameralooking from above (without spin, collision, etc.)
• Pre‐requisite: camera pose known with respect to table• Which components are contained in:
– State :– Measurement : – Control input :
20Courtesy of U. Frese

State estimation example
• Dynamical system: tracking of billard balls by means of a cameralooking from above (without spin, collision, etc.)
• Pre‐requisite: camera pose known with respect to table• Which components are contained in (simple model):
– State , , , [m] position and velocity in reference frame of billard table
– Measurement , [Pixel] pixel position of ball in camera image
– Control input empty, however, we can assume constant velocity during a time interval
• Question: how could the Markov assumption be violated here?– E.g. badly calibrated camera– Interaction with other balls or table (collisions)– Physical aspects: spin, friction, …
21

Probabilistic generative laws
• The evolution of state and measurements is governed byprobabilistic laws
• State is generated stochastically from state :
: , : , :
• Assuming that the state is complete:
: , : , : ,
22
Markov assumption:
example of conditionalindependence

Probabilistic generative laws
• Measurement is generated stochastically from state :
: , : , :
• Assuming that the state is complete:
: , : , :
23
Another Markov assumption(conditional independence)

Odometry input u1: 1m forward.
Measurement z2: here is a door. 24
Introductory example

Probabilistic generative laws
25
• State transition probability– Specifies, how the state
evolves over time as a function of the previous stateand the current control data
• Measurement probability/likelihood– Specifies how measurements
are generated as function of thestate
– Measurements can beunderstood as noisy projectionsof the state
Dynamic Bayesian network/
Hidden Markov model
Motion
model
Measurement
modelThis is what we model!

Belief
• In Bayesian inference, we usually want to estimate the state given sequences of measurements : and control data : and the respective state transition , and measurement probabilities
• Our estimate of the true state is also called belief:
| : , :
| : , :
26
Posterior distribution of conditioned on all available data
after including the current measurement
Prediction of before including the currentmeasurement
Time update: calculationof predicted state fromcurrent state and control
input
Measurement update/correction:
calculation of posteriorfrom predicted state

Odometry input u1: 1m forward.
Measurement z2: here is a door. 27
Introductory example

SA-1
A general algorithm for state estimation (inference): Bayes filter

Prediction
Correction
Prediction
Correction
Recursive Bayes filter algorithm
All entities are modelled as random variables with PDFs
Prediction
Correction
1 2 3
29

Recursive Bayesian filtering
• Use probability distributions to model the estimation problem– Prediction/time update: calculate prior belief based on dynamic model– Correction/measurement update: calculate posterior belief based on
measurement model
30posterior likelihood motion model posterior at t-1
measure predictcorrect

2. Prediction 3. Measurement
1. Image acquisition 4. Modelmatching
5. Correction
Tracking pipeline
31

Recursive Bayes filter algorithm
1. Bayes_filter( , , ):
2. for all do
3. = Time_update( , )
4. = Measurement_update( , )
5. endfor
6. return
32

Measurement update step derived
= Measurement_update( , )
: , :
, : , : : , :
: , :
: , :
33
Bayes
Markov,
normalizer

Time update step derived
= Time_update( , )
: , :
, : , : : , :
, : , :
,
For a finite state space, the integral turns into a sum
34
Expand using
marginalization
Markov

Bayes update rule
35
Posteriorat time
Posterior attime 1
State transition probabilityDynamic model
Measurement likelihoodMeasurement model

Bayes filter algorithm
Prerequisites:• Assumption: the world is Markov, i.e. the state is complete• Given: 3 probability density functions:
– Initial belief: – Measurement probability: – State transition probability: ,
36

Hands‐on example of Bayesian inference
37
?
Prior belief
p staircase 0.1
Bayesian inference (measurement update)
p staircase| image p image |staircase p staircase
p im | stair p stair p im | nostair p nostair
0.7 0.1/ 0.7 0.1 0.2 0.9 0.28
Sensor model
p image| staircase 0.7p image| nostaircase 0.2
=
1. for all do
2. 3. endfor

38
Tip: how to calculate the normalization
)()|(1)(
)()|()(
)()|()(
1
xPxyPyP
xPxyPyP
xPxyPyxP
x
yx
xyx
yx
yxPx
xPxyPx
|
|
|
aux)|(:
aux1
)()|(aux:
Algorithm:The resulting
distribution must integrate to 1

Summary: Bayes filter framework
• Given:– Stream of measurements : and control data : – Measurement model |– Dynamic model | ,– Prior/Initial probability of the system state
• Wanted: – Estimate of the state of a dynamical system– The posterior of the state is also called belief:bel
| : , :
39

Markov Assumption
Underlying Assumptions• Static world• Independent noise• Perfect model, no approximation errors
40
: : :: : :

Reality
Environment dynamics
Approximatecomputation
Sensor limitations
Random effects
Inaccuratemodels
41
Sources of errorand uncertainty

Summary: Bayes filters
• Probabilistic tool for recursively estimating the state of a dynamical system from noisy measurements and control inputs.
• Based on probabilistic concepts such as the Bayes theorem, marginalization, and conditional independence.
• Make a Markov assumption according to which the state is a complete summary of the past. In real‐world problems, thisassumption is usually an approximation!
• Can in the presented form only be implemented for simple estimation problems, requires either…or…– closed form solutions for multiplication and integral– restriction to finite state spaces
42

Outlook
• What is missing:– Concrete representations for belief– Concrete representations for probability density functions– Implementable and tractable filter approximations– Applicability to complex and continuous estimation problems– Hands‐on experience
• Readings:– Kalman Filtering book by Peter Maybeck, chapter 1:
http://www.cs.unc.edu/~welch/kalman/maybeck.html• Next lectures:
– Filters: (Extended) Kalman filter– Measurement and motion models
43

Exercise 1
• Available at: http://av.dfki.de/images/stories/lectures/opt‐ss12/exercise1.pdf– Simple computations (probabilistic concepts, Bayes filter)– Handling of Gaussians (preparation for next lecture)
• If you want feedback, hand in solutions until June 12• Tutorial session: Thursday, 14.06.2012, 14:00‐15:30, DFKI, room
2.04 (second floor)– Discussion of solutions– Preparation for next lecture (Bayes filter with Gaussians)
• Any questions?
44


















