Introduction - School of Engineeringresearch.vuse.vanderbilt.edu › srdesign › 2007 › group2...
38
Vanderbilt University Department of Biomedical Engineering Senior Design Project Instrumented Wheel For Wheelchair Propulsion Assessment Date Reported: April 22, 2008 Group #2 Jacob Connelly Andrew Cramer John Labiak Advisor: W Mark Richter, PhD.
Transcript of Introduction - School of Engineeringresearch.vuse.vanderbilt.edu › srdesign › 2007 › group2...

Vanderbilt University
Department of Biomedical Engineering
Senior Design Project
Instrumented Wheel For Wheelchair Propulsion Assessment
Date Reported: April 22, 2008
Group #2
Jacob Connelly
Andrew Cramer
John Labiak
Advisor: W Mark Richter, PhD.

Abstract
The development of upper extremity (UE) pain and/or injury is a prevalent health
concern amongst manual wheelchair users. The UEs serve as the principle means for
mobility for this population, therefore, any impeding factors, such as pain or injury, will
lead to a decreased quality of life. The development of UE pain and injury may be a
result of improper propulsion biomechanics or poor wheelchair seating configurations. In
order to quantitatively assess a manual wheelchair user’s propulsion technique for
training or seating purposes, there is a need for an affordable instrumented assessment
tool. The goal of the project was to develop an instrumented wheelchair wheel utilizing
strain gauges that have the capability of quantitatively measuring resultant force during
propulsion. Strain gauges were placed on the top and bottom of each of the pushrim tabs
that couple the wheel to the pushrim. The strain gauges were then wired into a
Wheatstone bridge circuit which was then connected to an instrumentation amplifier
circuit. The output voltages were then sent via a data acquisition unit with Bluetooth
capabilities to a local computer to be recorded, processed, and analyzed in LabView. A
standard curve was created relating resultant force to output voltage. The prototype wheel
developed demonstrates the ability to assess wheelchair propulsion by measuring strain
created by resultant force. Small changes in voltage created by flexion in the pushrim can
be sufficiently amplified in order to gain the appropriate sensitivity to clearly track the
resultant force applied during propulsion.

Introduction
The development of upper extremity (UE) pain and/or injury is a prevalent health
concern amongst manual propulsion wheelchair users. Sie et al. found that 64 percent of
individuals within a study of 239 paraplegic patients experienced UE pain [1]. Similarly,
Dalyan et al. and Gellman et al. reported the prevalence of UE pain within manual
wheelchair user populations to be 59 and 68 percent, respectively [2-3]. The UEs serve as
the principle means for mobility, therefore, any impeding factors, such as pain or injury,
can lead to a decreased quality of life. The development of UE pain and injury may be a
result of improper propulsion biomechanics or unsuitable seating conditions. In order to
quantitatively study, classify, or train a manual wheelchair user's (MWU) propulsion
techniques, there is a necessity for an instrumented assessment tool.
Current commercially available assessment tools, such as the SmartWheel
developed by Three Rivers [6], are exceedingly expensive and measure several
biomechanical forces and parameters, many of which are unnecessary for clinical
applications. An instrumented wheel designed to asses solely resultant propulsion force
and push cadence would severely decrease cost by providing only the necessary clinical
data.
A successfully designed instrumented wheel would provide a much needed tool in
seating and mobility clinics. This assessment tool would provide important information
on the propulsion habits of wheelchair users. Improper propulsion could be quickly and
accurately characterized, then corrected through clinical training programs that promote
ideal propulsion techniques set forth by the Consortium of Spinal Cord Medicine [4].
Furthermore, modified pushrim systems could be prescribed and fitted for special case

MWUs with non-correctable propulsion conditions. Pain and injury in MWUs could also
be avoided by improving customized seating conditions. Typically seating is determined
solely by the user's biometrics; however, it is important to also consider the user's
propulsive style and needs. Richter et al. showed that propulsion characteristics are
directly altered by changing wheelchair seating configurations [5]. By analyzing
resultant force characteristics it is possible to optimize the user's position in relation to
the pushrim to improve propulsive technique and lessen the likelihood of developing UE
pain and injury. Essentially, the instrumented wheel will serve as a means to
quantitatively compare various wheelchairs and seating configurations to optimize the
degree of comfort and propulsive capabilities of MWUs. With comparative propulsion
data, the instrumented wheel will also serve as justification for the selection of particular
wheelchair equipment for insurance reimbursement purposes.
Methodology
Design of the Instrumented Wheel
In order to
quantifiably assess
manual wheelchair
propulsion, a standard 24''
wheelchair wheel [a] and
pushrim were
instrumented with strain
gauges. The pushrim is
coupled to the wheel by Figure 1. The thinness of the tab design allows for some degree of pushrim flexibility.

three connection tabs. The
pushrim tabs, which were
designed in SolidWorks [b], are
shown in Figure 1. The pushrim
with the tabs connected is shown
in Figure 2. Standard pushrims
have six tabs that connect the
wheel to the pushrim, providing
a highly rigid and robust system
with an extremely high safety factor. By reducing the number of pushrim tabs to three,
the overall rigidity of the pushrim-wheel system is decreased allowing for a small degree
of flexibility. Uniaxial strain gauges were attached to the top and bottom of each pushrim
tab [c]. Application of force to the pushrim results in a change in the electrical resistance
of the strain gauges. In addition, the increased flexibility of the pushrim from reduction to
only three pushrim tabs allows for an adequate change in the resistance of the strain
gauges that can be
accurately measured.
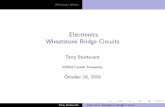
The strain gauges
were wired into a
Wheatstone bridge circuit,
Figure 3. When force is
applied to the pushrim, the
resistance of the strain
Figure 2. The pushrim design consists of three tabs connecting the pushrim to the wheel.
Figure 3. A Wheatstone bridge is used to determine the change in resistance of the strain gauges.

gauges change corresponding to being in tension or compression. These changes in
resistance are reflected in changes in the two voltage outputs from the Wheatstone bridge.
However, the changes in the differential output voltage from the Wheatstone bridge were
small, approximately 10mV, and required amplification. An instrumentation amplifier,
seen in Figure 4, was implemented with a gain of 400. Calculations are shown below.
Each of the three tabs utilize one Wheatstone bridge and one instrumentation amplifier
which generate an output voltage due to the force applied to that tab. A printed circuit
board (PCB) containing the Wheatstone bridges and instrumentation amplifiers for each
of the three tabs was designed [d,e]. The wheel was then wired with 0.015'' diameter wire
allowing the strain gauges to be connected to the PCB. The wire was run through the
interior of the wheel, protecting it from environmental exposure and damage. The power
supply for the wheel is four AAA batteries providing 6V, however a 5V-5V dc-dc
converter was used in the PCB to provide a constant voltage through the circuit. The
three output voltages from the three instrumentation amplifiers were then sent to an 8-pin
data acquisition unit (DAQ) [f].
The PCB, DAQ, and power
supply were mounted on a black
plastic board. The plastic board
was securely mounted to the
spokes of the wheel.
The data was sent from
the DAQ to LabView [g] via a
USB compatible Bluetooth
Figure 4. An instrumentation amplifier is used to amplify the output voltage of the Wheatstone bridge.

transceiver [h]. Within LabView the data was recorded, processed through low-pass
filters, and analyzed. A standard curve relating voltage to applied resultant force was
created by applying known forces (5-25lb) to the pushrim with a spring scale and
recording the changes in the output voltages.
Determination of Resultant Force
In order to determine the overall applied resultant force, each tab was analyzed
individually. When a force is applied to the pushrim, each tab will be strained leading to
one strain gauge being in compression (C) while the other is in tension (T). The resulting
strain will cause the resistance of each strain gauge to change; tension causes resistance
to increase and compression causes resistance to decrease. As the resistance of the strain
gauges change, there is a corresponding change in the output voltage of the Wheatstone
bridge ( ). This change in output voltage is governed by the following equation:
(1)
where (which is the same as the nominal value of the strain gauges) and
. The output voltage from the Wheatstone bridge in then amplified using the
instrumentation amplifier shown in Figure 4 according to the following equation:
(2)
where is the voltage output of the instrumentation amplifier. The gain associated
with the instrumentation amplifier is equal to:
(3)

where , (desired output voltage) and
(approximated change in voltage from the Wheatstone bridge), thus:
(4)
The value of the resistor is equal to:
(5)
A standard curve relating output voltage and resultant force was created by
applying the known forces of 5, 10, 15, 20, and 25 pounds to the pushrim using a spring
scale. The forces were applied in close proximity to each of the three tabs. Each time a
force was applied to the pushrim, the magnitude of the change in output voltage for each
of the three tabs would change in relation to the location of the applied force. From the
three output voltages corresponding to each tab a single voltage corresponding to the
resultant force was determined using the following equation:
(6)
For each applied force (5-25 lbs)
we determined . We then
used these values to create a
Voltage vs. Force Standard
Curve.
Results
Figure 5. The instrumented wheel is used to assess the propulsion techniques of manual wheelchair users.

Figure 5 shows an
image of the final design of the
instrumented wheel. The wheel
was constructed in order to
maximize the voltage output
for a given applied force. The
final design utilized only three
tabs of a thin aluminum design.
This was intended to maximize
the displacement of the
pushrim upon the application
of a force, increase strain on
the pushrim attachments, and
in turn increase the change in
gauge resistance and voltage
output accordingly. Strain
gauges were mounted to the
top and bottom of each tab using adhesive, and wiring was run from the strain gauges
through the wheel well (Figure 6) to the Wheatstone bridge. The electronic circuit
constructed included a half-bridge circuit and an instrumentation amplifier for each of the
three tabs respectively. The instrumentation amplifier performed according to the
anticipated specifications and calculations made in the Methods section. The recorded
output voltages, seen in Table 1 below, are approximately 350.0 times higher than the
Figure 6. Wiring was run from the strain gauges, through the wheel well, to the Wheatstone bridge.
Figure 7. The Wheatstone bridge, instrumentation amplifier, and DAQ w/ Bluetooth wireless transceiver were mounted to the spokes of the wheel.

voltage output from the corresponding strain gauges. When compared to the calculated
gain of 400, the amplifier yielded an insignificant level of error and achieved the desired
result of amplification. The Wheatstone bridge, instrumentation amplifier, DAQ with
wireless Bluetooth transceiver, and power supply were mounted to the wheel spokes, as
seen in Figure 7.
Trial 1 Trial 2 Average
Tab
Force (lb)
5 0.1 0.3 0.05 0.45 0.05 0.4 0.2 0.65 0.550
10 0.4 0.2 0.25 0.85 0.15 0.75 0.2 1.1 0.975
15 0.6 0.2 0.3 1.1 0.2 0.8 0.35 1.35 1.23
20 0.85 0.35 0.3 1.5 0.3 0.9 0.4 1.6 1.55
25 1.1 0.3 0.3 1.7 0.4 1.25 0.4 2.05 1.88
Table 1. Output voltage data was recorded over a range of applied force values and was used to construct the standard curve.
Table 1 shows the voltage data from trial 1 and 2 and their average. Trial 3
produced inaccurate data
and as a result the data
was omitted. Using the
average values for each
applied force we created
a Voltage vs. Force
standard curve, which is
y = 0.0645x + 0.2675R2 = 0.9946
00.20.40.60.8
11.21.41.61.8
2
0 5 10 15 20 25 30
Force (lb)
Volta
ge (V
)
Figure 8. The standard curve shows the relationship between voltage output and applied force.

shown in Figure 8. The graph shows a strong linear relationship between voltage and
force, with a correlation coefficient of 0.9946. For any output voltage the applied force
can be determined using the equation for the best-fit line:
(4)
Though our prototype has fulfilled the project goals by producing a measurable
change in voltage in response to an applied resultant force and a strong linear correlation
based on recorded experimental data, there still remain a few challenges in producing a
marketable product. The first of these challenges is the sensitivity within the electronic
instrumentation of the wheel. Due to the initially small voltage outputs from the strain
gauges and the necessity of high gain amplification, the components within the circuit
have caused imprecision within our results. Despite acquiring highly relatable voltage
differentials, the raw voltage data is significantly different. That is, the baseline voltage
for each of the three tabs – 0.0, 1.4, and 2.0 V for tab 3, 2, and 1, respectively – varies
depending on the actual resistivity amongst each nominal resistor in the bridge and gain
resistor in the amplifiers. During experimentation we found that the 1.0% tolerance of the
350 Ohm resistors used in the half-bridge significantly affected the baseline voltage
output for the respective tab.
As a secondary challenge, the voltage differential decreases as the applied force
moves farther away from the tab's point of attachment. This causes a lower and
unrepresentative change in voltage compared to the applied force, rendering the standard
curve ineffective. However, this problem can be easily fixed by incorporating an angle
sensor to supply multiplicative calibration factors in order to augment the decreased
voltage differential depending on the point of application (coinciding with wheel angle).

Another option is to include software coding that supplies similar calibration factors
based on force application (coinciding with percent differences in voltage differential). A
simple suggestion for such function is shown in Appendix I.
Economic Analysis
Market Analysis
The instrumented wheel will be primarily target seating and training clinics,
rehabilitation centers, and research labs across the U.S. These centers will benefit from
use of the instrumented wheel since it gives them a means of assessing the propulsion
techniques of manual wheelchairs users which can then be used to properly seat and train
users as to the most biomechanically efficient propulsion technique. As shown in Table 2,
there are approximately 130-200 centers across the United States that could benefit from
use of the instrumented wheel. The SmartWheel, which is priced at around $25,000, is
currently in use in over 60 rehab centers across the U.S. [6]. Given that the price of the
instrumented wheel will be considerably less, we feel we can expect the instrumented
wheel to be put into use by approximately 100-150 centers in the U.S.
Center NumberSeating & Training Clinics 50-100
Spinal Cord Injury Hospitals and Rehabilitation Centers
30-50
Research Labs ~50Total ~130-200
Table 2. There are approximately 130-200 centers in the U.S. that could benefit from use of the instrumented wheel.
Development Cost Analysis
Table 3 shows the estimated cost of development of the instrumented wheel,
including parts and labor. The product will be sold as a pair of wheels; one will be
instrumented, and the other will be weighted as to have the same inertial effects. As

shown in Table 3, the estimated cost for parts is $1032 and the estimated cost for labor is
$180, for a total estimated cost of $1212.
Cost Quantity TotalParts
Transducer Quality Strain Gauges
$7 6 $42
Printed Circuit Board $20 3 $60DAQ $250 1 $250
Bluetooth $60 1 $60Wheelchair Wheels $250 2 $500
Push Rim $50 2 $100Electrical Supplies(i.e. wire; solder)
$20 n/a $20
Labor $15/hour 12 hours $180Total $1212
Table 3. The estimated cost of labor and parts for the instrumented wheel is $1212.
Overhead Analysis
The marketing plan for the instrumented wheel consists of contacting targeted
seating and training clinics, rehabilitation centers, and research labs by telephone first to
see if they have a need/desire for a device that offers wheelchair propulsion assessment.
If a potential customer is found, a representative will travel to the potential customer in
order to demonstrate use of the instrumented wheel and address any concerns there may
be. Therefore, it is expected that a primary overhead will be the cost of travel. Additional
overhead will include insurance, legal fees, taxes, rent, and utilities. Given these
considerations, we estimate an overhead cost of approximately $1000/month.
Benefit Analysis
It is difficult to perform a quantitative benefit analysis on the instrumented wheel,
because many of the benefits of the instrumented wheel cannot be expressed strictly in

dollar terms. However, qualitatively the instrumented wheel will provide the seating and
training clinics, rehabilitation centers, and research labs that will use it an important tool
for achieving their ultimate goal: the improvement in the quality of life of their
customers. Specifically, by offering feedback on the propulsion techniques of manual
wheelchair users, the instrumented wheel will help to determine the proper way to seat
manual wheelchair users and the most biomechanically efficient method for propelling
the wheelchair on a patient specific basis, both of which will prevent overuse injuries and
go a long way in improving the quality of life of manual wheelchair users.
Life Cycle/Cost of Maintenance
We do not expect there to be any additional costs of maintenance over the cost
necessary to maintain an ordinary wheelchair wheel, aside from costs associated with
powering the instrumentation of the wheel, which requires four AAA batteries. The parts
used in the construction of the wheel are such that the wheel should be resistant to any
forms of mechanical failure. Exposed wire was run through the wheel well and exposed
wire was insulated to prevent any damage that might lead to the malfunction of the
circuitry. The only concern with the current prototype is that the power supply, DAQ, and
circuit board are exposed to the environment on the side of the wheel nearest the user,
making it susceptible to damage; however, any model going to market would utilize a
hub to completely enclose these elements.
Pricing
Given the above costs, the expected benefits, and the expected life of the
instrumented wheel, it is feasible that it can be brought to the market for a price of
$5,000.

Safety Analysis
There are minimal human safety concerns associated with the use of the
instrumented wheelchair wheel for propulsion assessment. Although not proposing a
serious threat or danger, there are concerns regarding: (1) exposure of wiring within
range of human contact, (2) incorrect calibration of the instrument, and (3) subjects'
rights protection during instrument validation studies.
While the vast majority of the wiring connecting the strain gauges, PCB, and
DAQ are confined and isolated within the construction of the wheel, there are still small
sections of wire exposed near the pushrim tabs and strain gauges. While the wire is
insulated with a solid rubber coating there are still small sections that were stripped in
order to make solder connections with the strain gauges. In order to avoid short circuiting
and human contact with live wires, efforts were taken to completely insulate these
connection wires using Plasti-dip. While the voltage in these connection wires is
extremely low (5V), it is still necessary for the integrity of the instrument and for human
safety to take every effort to minimize the risk of human contact to these wires.
Currently, it is unknown how the instrument will perform over an extended period
of time. It is highly likely that the instrument will need to undergo calibration in order to
ensure accurate measurements each time it is used. Inaccurate measurements have the
potential to lead to improper decisions to be made in relation to resultant force regarding
wheelchair seating configurations or propulsion technique recommendations.
Before the instrumented wheelchair wheel is provided on the market, it will
undergo a validation study to ensure that it functions correctly and accurately. This study
will consist of comparison measures between the instrumented wheel and a previously

validated propulsiometer through the investigation of the accuracy of resultant force
measurement in various environments, including pushing on a motor driven treadmill and
pushing on public sidewalks and/or ramps. The goal will be to statistically prove that the
strain gauge based instrumented wheel provides accurate measurements of the resultant
forces in comparison to the propulsiometer. Before subjects will be able to participate,
there must be IRB approval to protect their rights during the study.
The instrumented wheelchair wheel is not classified as a medical device and
consequently does not require FDA regulation or approval. However, in the best interests
of MAX mobility and other contributing business entities, every effort will be taken to
ensure the maximum safety of the device and the consumer during use. Although there is
a minimal amount of risk surrounding the continuing development, validation, and
market dissemination of the instrumented wheel, it is believed that the benefits of
providing an affordable tool to quantitatively assess a manual wheelchair user’s
propulsion technique for training or seating purposes far exceeds any potential risk.
Conclusion
The prototype wheel developed here demonstrates the ability to assess wheel
chair propulsion by measuring strain created by resultant force. Small changes in voltage
created by flexion in the pushrim can be sufficiently amplified in order to gain the
appropriate sensitivity to clearly track the resultant force applied to the system. Though
there are a few modifications that need to be made in order to introduce this technology
to the market – incorporation of circuit elements with finite tolerances and the ability to
locate force application – this prototype serves as a solid basis for future designs utilizing
strain gauges to instrument wheelchair wheels for propulsion assessment.

Recommendations
Design considerations for the improvement of the current prototype include the
use of more precise circuit components (<1% tolerance), as the imprecision of circuit
components can cause imbalances in the bridge circuit which lead to deviations in the
output voltage of respective tabs, thereby skewing our results. In addition, improvements
can be made by measuring the tolerances of individual components to ensure they are all
equal. Furthermore, to more accurately gauge resultant force over the entire pushrim,
software or hardware additions, such as an angle sensor, are necessary in order to
determine the location of the applied force. The use of additional pushrim tabs would
enable better tracking of the applied propulsion forces, and is another option for future
modification. As we have found, however, there is a trade off between the use of
additional tabs and maintaining an appropriate level of pushrim rigidity. Therefore, the
use of additional tabs may necessitate the use of more sensitive circuit elements.
References
1. Sie IH, Waters RL, Adkins RH, Gellman H. Upper extremity pain in the
postrehabilitation spinal cord injured patient. Arch Phys Med Rehabil.
1992;73:44–48.
2. Dalyan M, Cardenas DD, Gerard B. Upper extremity pain after spinal cord injury.
Spinal Cord. 1999;37:191–95.
3. Gellman H, Sie IH, Waters RL. Late complications of the weight-bearing upper
extremity in the paraplegic patient. Clin Orthop. 1988;233:132–35.
4. Preservation of upper limb function following spinal cord injury: a clinical practice
guideline for health-care professionals. J Spinal Cord Med. 2005;28(5):434-70.

5. Richter WM. The effect of seat position on manual wheelchair propulsion
biomechanics: a quasi-static model-based approach. Medical Engineering &
Physics. 2001;23:707-12.
6. "The SmartWheel". Three Rivers Holdings, LLC.
<http://www.3rivers.com/swhome.php>.
Suppliers
a. Spinergy Wheel. Spinergy 6231 Yarrow Drive, Suite C, Carlsbad, CA 92011 USA.
b. SolidWorks. SolidWorks Corporation, 300 Baker Avenue, Concord, MA 01742
c. Transducer Quality Strain Gauges. SGT-1/350-TY13. OMEGA Engineering, INC. One Omega Drive Stamford, Connecticut 06907.
d. Printed Circuit Board. Express PCB. http://www.expresspcb.com/index.htm
e. Circuit Components (resistors, dc-dc convertors, connectors, operational amplifiers). Mouser Electronics. 1000 North Main Street | Mansfield, TX 76063.
f. BlueSentry AD data acquisition. RN-800S-CB. Roving Networks. 809 University Avenue, Los Gatos, CA 95032 USA. g. LabView. National Instruments. 11500 N Mopac Expwy, Austin, TX 78759-3504
h. Bluetooth USB Adapter. RN-USB-T. Roving Networks. 809 University Avenue, Los Gatos, CA 95032 USA.
Appendix
I. Resultant Force Calculation for Propulsion Assessment Using Vector Exclusion to Derive Calibration Factors
Because the voltage differential decreases as the application of force moves
farther away from the tab's point of attachment, it is necessary to augment these changes
in order to use the standard curve seen in the Results section. The purpose of this
program is to calculate the appropriate calibration factors based on the percent difference
in voltage differential. Because there is a defined relationship between the magnitude of

the voltage response and the distance of applied force from the tabs on the wheel, it is
possible to locate the position of force application based on these differences. In order to
accomplish this, each voltage differential is ranked highest to lowest. The highest
response indicates the tab most near the point of application. The second highest rank
indicates the tab second closest to the point of application. The program excludes voltage
data from the third tab and then calculates the fraction of the highest ranked tab over the
second highest. This fraction is then compared to a calibration table seen in the matrix
data, which holds experimental data relating the fractional voltage response of every
point of the wheel corresponding to the distance from each tab. The calculated fraction
then calls a specific calibration factor from data. The voltage output from the highest
ranked tab is multiplied by the calibration factor in order to gain the value of the voltage
output that would have been recorded given the force were applied directly above that
tab. When this voltage output is determined, the standard curve created in the Results
section can be used to relate the modified voltage output to a resultant force value.
Matlab Code
function [ResultantForce] = ResultantForce
%%% Resultant Force Calculation for Propulsion Assessment Using Vector %%%%%% Exclusion to derive Calibration Factors. %%%%
load(data.dat) %voltage output dataload(calibration.dat) %theta and scaling factor derived from performed %calibration on the wheel
%%FROM LOADED DATA FILES RECORDED IN LABVIEW%% N=length(data.dat); %length of input vector from DAQV1=data(1:end,1); %output voltage vector from tab 1V2=data(1:end,2); %output voltage vector from tab 2V3=data(1:end,3); %output voltage vector from tab 3theta=calibration(1:end,1); %degree angle value matched to a percent diff.percentdiff=calibration(1:end,2); %percent difference between dominant tab %and secondary tab to give wheel loactionfactor=calibration(1:end,3); %scaling factor to return resultant force from %fractional output at the dominant tab.

%%FROM THE CALCULATED CALIBRATION CURVES IN EXCEL%% slope1=value; %slope of the Excel calibration curve for tab 1 slope2=value; %slope of the Excel calibration curve for tab 2 slope3=value; %slope of the Excel calibration curve for tab 3intercept1=value; %y intercept of the Excel calibration curve for tab 1intercept2=value; %y intercept of the Excel calibration curve for tab 2intercept3=value; %y intercept of the Excel calibration curve for tab 3
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
V1min=V1(1); %baseline value from tab 1V2min=V2(2); %baseline value from tab 2V2min=V2(2); %baseline value from tab 2
V1diff=(max(V1)- V1min); %Voltage change caused by force to tab 1V2diff=(max(V2)- V2min); %Voltage change caused by force to tab 2V3diff=(max(V3)- V3min); %Voltage change caused by force to tab 3if V1diff >= V2diff && V2diff >= V3diff perdiff1=V1diff/V2diff; [m,n]=find(percentdiff==perdiff1); theta1=theta(m,n); factor1=factor(m,n); scalevolt1=factor1*max(V1); ResultantForce=slope1*scalevolt+intercept1;endelseif V1diff >= V3diff && V3diff >= V2diff perdiff1=V1diff/V3diff; [m,n]=find(percentdiff==perdiff1); theta1=theta(m,n); factor1=factor(m,n); scalevolt1=factor1*max(V1); ResultantForce=slope1*scalevolt+intercept1;endelseif V2diff >= V1diff && V1diff >= V3diff perdiff2=V2diff/V1diff; [m,n]=find(percentdiff==perdiff2); theta2=theta(m,n); factor2=factor(m,n); scalevolt2=factor2*max(V2); ResultantForce=slope2*scalevolt+intercept2;endelseif V2diff >= V3diff && V3diff >= V1diff perdiff2=V2diff/V3diff; [m,n]=find(percentdiff==perdiff2); theta2=theta(m,n); factor2=factor(m,n); scalevolt2=factor2*max(V2); ResultantForce=slope2*scalevolt+intercept2;endelseif V3diff >= V1diff && V1diff >= V2diff perdiff3=V3diff/V1diff; [m,n]=find(percentdiff==perdiff3);

theta3=theta(m,n); factor3=factor(m,n); scalevolt3=factor3*max(V3); ResultantForce=slope3*scalevolt+intercept3;endelseif V3diff >= V2diff && V2diff >= V1diff perdiff3=V3diff/V2diff; [m,n]=find(percentdiff==perdiff3); theta3=theta(m,n); factor3=factor(m,n); scalevolt3=factor3*max(V3); ResultantForce=slope3*scalevolt+intercept3;end
II. Innovation Workbench
Ideation Process
Project Initiation
Project name:Instrumented Wheel for Wheelchair Propulsion AssessmentProject timeline:Expected Completion Date: Senior Design Day-April 2008Project team:Jacob ConnellyAndrew CramerJohn Labiak
Innovation Situation Questionnaire
Brief description of the situation Improper wheelchair propulsion techniques lead to upper extremity injury.
Detailed description of the situation Wheelchair propulsion necessitates force production. The force production required for wheelchair propulsion acts not only on the wheelchair wheel itself, but on the bones in the upper extremities of the user. When the user is using improper techniques to propel the wheelchair the stress on the upper extremities will be higher. After years of wheelchair propulsion via improper techniques, wheelchair users will develop upper extremity injuries. By recording the forces involved in wheelchair propulsion it is possible to determine the most biomechanically efficient technique for wheelchair propulsion. By teaching users proper propulsion techniques the number of upper extremity injuries from wheelchair usage can be reduced.

Supersystem - System - Subsystems
System nameInstrumented wheelchair wheel
System structureThe system consists of the wheelchair wheel, strain guages to measure output voltage and a circuit to process the output voltage and convert it to a strain that can then be used to determine resultant force.
Supersystems and environmentWheelchair user.
Systems with similar problemsPeople who use crutches or any other device to assist in walking can develop upper extremity injuries due to improper use.
Input - Process - Output
Functioning of the systemThe system will function by using strain gauges to measure the strain that results from wheelchair propulsion. That strain can then be used to determine the resultant forces.
System inputsThe input that is responsible for the problem is improper wheelchair propulsion techniques.
System outputsBy determining the resultant forces involved in wheelchair propulsion we can determine the most biomechanically efficient method for wheelchair propulsion and then use that information to train users as to the proper technique.
Cause - Problem - Effect
Problem to be resolvedWheelchair users experience upper extremity injury
Mechanism causing the problemImproper propulsion technique
Undesirable consequences if the problem is not resolvedChronic overuse injury; loss of upper extremity function Other problems to be solvedTeach wheelchair users proper propulsion technique

Past - Present - Future
History of the problemThe problem began with the advent of the wheelchair. Advancements have been made to design wheelchairs that are more biomechanically efficient; however, users still experience upper extremity injury due to improper propulsion techniques. Pre-process timeIf users are properly trained on propulsion techniques they will reduce the likelihood of upper extremity injury.
Post-process timeThe only way to prevent the upper extremity injury that can result is via disuse.
Resources, constraints and limitations
Available resourcesWe are able to use the facilities of Max Mobility LLC.
Allowable changes to the systemOnly minimal changes are allowed.
Constraints and limitationsWe are constrained economically. We only have a limited amount of funds, which necessitates that our design be economically efficient.
Criteria for selecting solution conceptsWe would like to create an instrumented wheelchair wheel for approximately several thousand dollars. Similar technology is going for approximately $25k. We would like to use this low cost instrument to measure the force that results from wheelchair propulsion. We will accomplish this by using strain gauges.
Problem Formulation and Brainstorming
Instrumented Wheel for Wheelchair propulsion assesment
12/5/2007 11:22:10 PM.
Find a way to eliminate, reduce, or prevent Upper extremity injuries in order to avoid Loss of upper extremity function under the conditions of Improper propulsion techniques.
Design wheelchair that requires proper technique in order to function (i.e the wheels will only turn when they are "properly" pushed).

12/5/2007 11:20:18 PM.
Find an alternative way to obtain Determine the proper propulsion technique that offers the following: provides or enhances Teach wheelchair users proper techniques does not require Info about forces involved in wheelchair propulsion.
Use the information that is available from previous studies to determine the most biomechanically efficient method for wheelchair propulsion and use that information to train users.
12/5/2007 11:18:18 PM.
Find an alternative way to obtain Info about forces involved in wheelchair propulsion that offers the following: provides or enhances Determine the proper propulsion technique does not require Design instrumented wheel.
Record wheelchair wheel velocity and acceleration under propulsion using an accelerometer and use the data to determine resultant forces.
12/5/2007 11:15:35 PM.
Find an alternative way to obtain Design instrumented wheel that provides or enhances Info about forces involved in wheelchair propulsion.
Use strain gauges to record strain and use that information to determine the forces involved in wheelchair propulsion.
12/5/2007 11:01:02 PM.
Find a way to eliminate, reduce, or prevent Improper propulsion techniques in order to avoid Upper extremity injuries.
Train users as to proper propulsion techniques.

Improperpropulsiontechniques
Upper extremityinjuries
Loss of upperextremity function
Designinstrumented
wheel
Info about forcesinvolved inwheelchairpropulsion
Determine theproper propulsion
technique
Teach wheelchairusers propertechniques