Interpolacion Newton Lagrange
47
UNIVERSIDAD DEL NORTE DEPARTAMENTO DE INGENIERÍA MECÁNICA FUNDAMENTOS DE MECÁNICA COMPUTACIONAL Ing. Alejandro Pacheco Sanjuán Interpolación: Interpolación: polinomios de Newton – polinomios de Lagrange Joseph Louis, conde de Lagrange
-
Upload
johnnys-bustillo-maury -
Category
Documents
-
view
283 -
download
2
description
Metodos Numericos
Transcript of Interpolacion Newton Lagrange
UNIVERSIDAD DEL NORTEDEPARTAMENTO DE INGENIERÍA MECÁNICA
FUNDAMENTOS DE MECÁNICA COMPUTACIONAL
Ing. Alejandro Pacheco Sanjuán
Interpolación: Interpolación:
polinomios de Newton –
polinomios de Lagrange
Joseph Louis, conde de Lagrange
•Interpolación: Los datos a ser encontrados se encuentran
dentro del dominio de los datos observados.
Interpolación y Extrapolación
•Extrapolación: Los datos a ser encontrados se encuentran
fuera del dominio de los datos observados (no muy confiables)
• Utilizada para estimar valores en puntos en el rango de los datos observados.
• Es diferente a una regresión (aproximación)
Interpolación
• Una interpolación pasa exactamente por los puntos marcados por los datos.
• De esta forma, no existe ningún error en los datos puntuales.
El métodos más común utiliza polinomios de interpolación
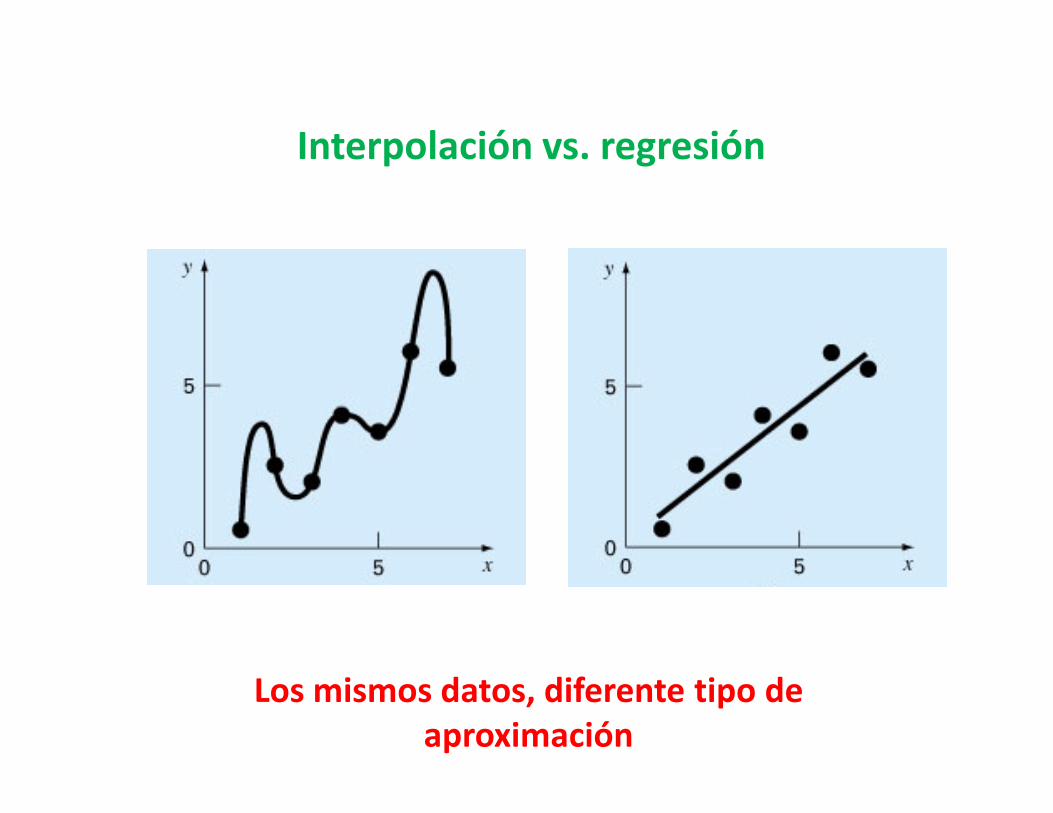
Interpolación vs. regresión
Los mismos datos, diferente tipo de aproximación
• Dados n datos puntuales, ajustar un único polinomio de orden (n-1) a través de ellos.
(((( )))) 1n
n
2
321 xaxaxaaxf −−−−++++++++++++++++==== ...
Interpolación polinomial
• Se puede utilizar interpolación polinomial para determinar las a’s
• MATLAB utiliza la siguiente designación para los polinomios
n1n
2n
2
1n
1 pxpxpxpxf ++++++++++++++++==== −−−−
−−−−−−−−L)(
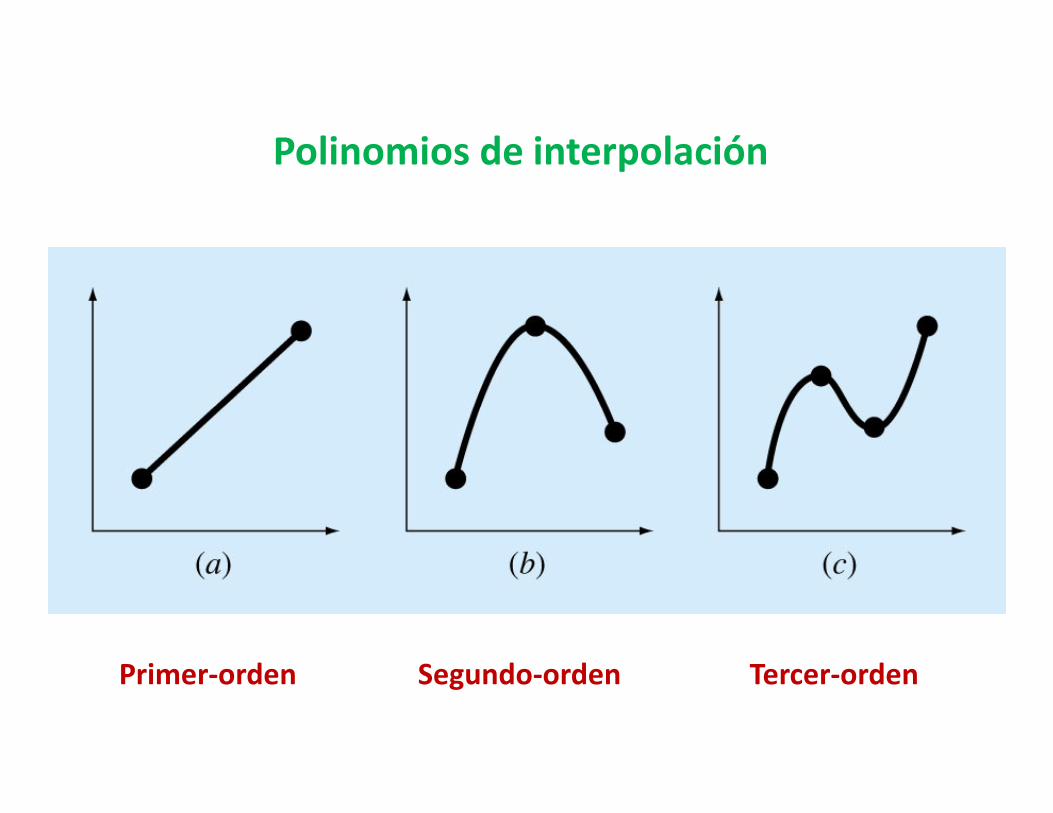
Polinomios de interpolación
Primer-orden Segundo-orden Tercer-orden
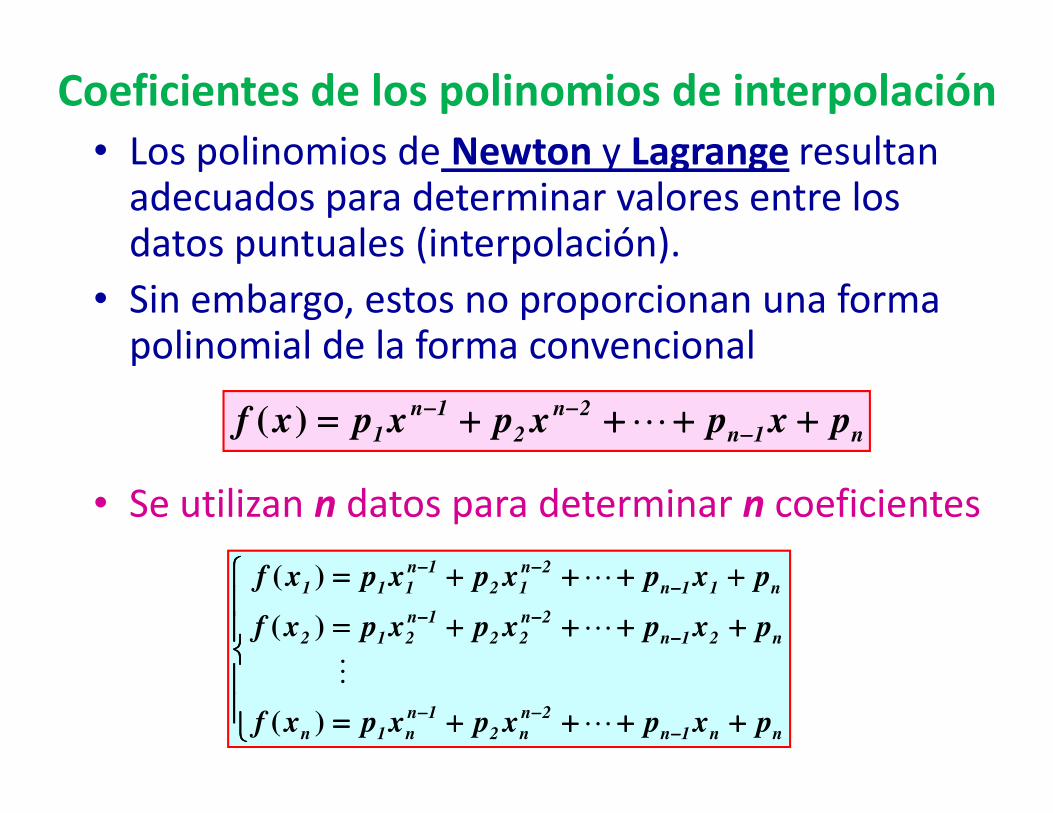
• Los polinomios de Newton y Lagrange resultan adecuados para determinar valores entre los datos puntuales (interpolación).
• Sin embargo, estos no proporcionan una forma polinomial de la forma convencional
2n1n pxpxpxpxf ++++++++++++++++==== −−−−−−−−L)(
Coeficientes de los polinomios de interpolación
• Se utilizan n datos para determinar n coeficientes
++++++++++++++++====
++++++++++++++++====
++++++++++++++++====
−−−−
−−−−−−−−
−−−−
−−−−−−−−
−−−−
−−−−−−−−
nn1n
2n
n2
1n
n1n
n21n
2n
22
1n
212
n11n
2n
12
1n
111
pxpxpxpxf
pxpxpxpxf
pxpxpxpxf
L
M
L
L
)(
)(
)(
n1n
2n
2
1n
1 pxpxpxpxf ++++++++++++++++==== −−−−
−−−−−−−−L)(
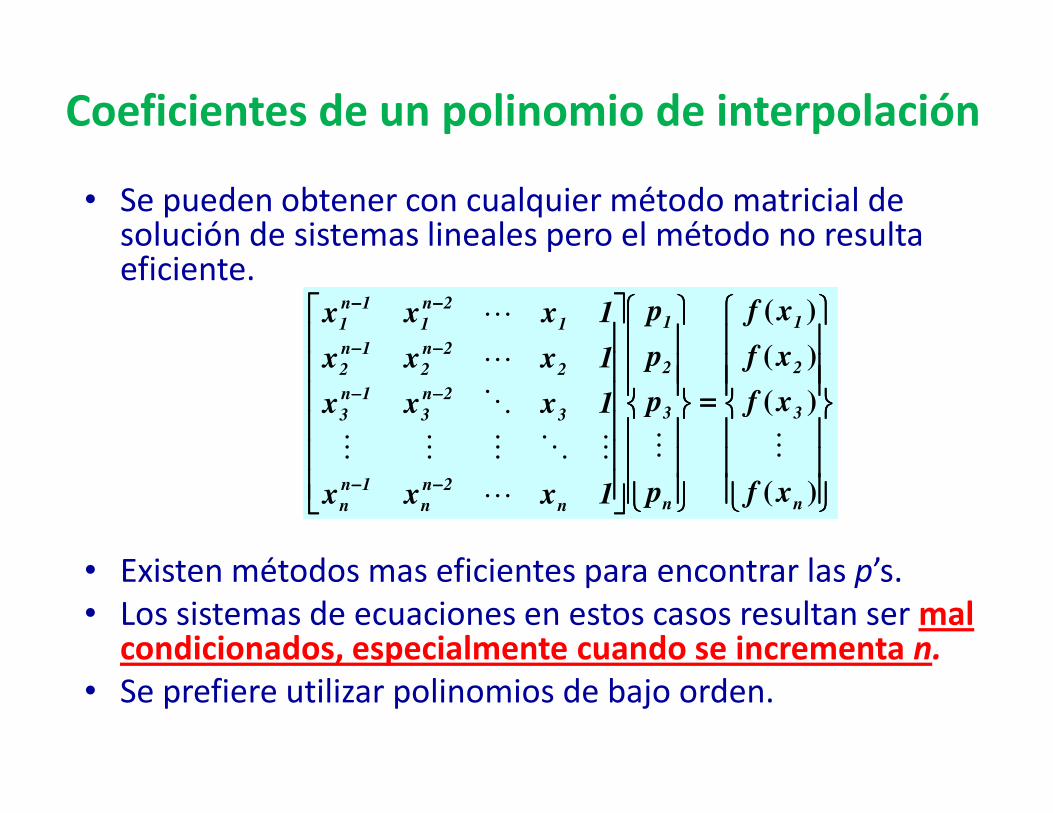
• Se pueden obtener con cualquier método matricial de solución de sistemas lineales pero el método no resulta eficiente.
====
−−−−−−−−
−−−−−−−−
−−−−−−−−
)(
)(
)(
3
2
1
3
2
1
3
2n
3
1n
3
2
2n
2
1n
2
1
2n
1
1n
1
xf
xf
xf
p
p
p
1xxx
1xxx
1xxx
O
L
L
Coeficientes de un polinomio de interpolación
• Existen métodos mas eficientes para encontrar las p’s.
• Los sistemas de ecuaciones en estos casos resultan ser mal condicionados, especialmente cuando se incrementa n.
• Se prefiere utilizar polinomios de bajo orden.
====
−−−−−−−− )(
)(
n
3
n
3
n
2n
n
1n
n
333
xf
xf
p
p
1xxx
1xxx
MM
L
MOMMM
O
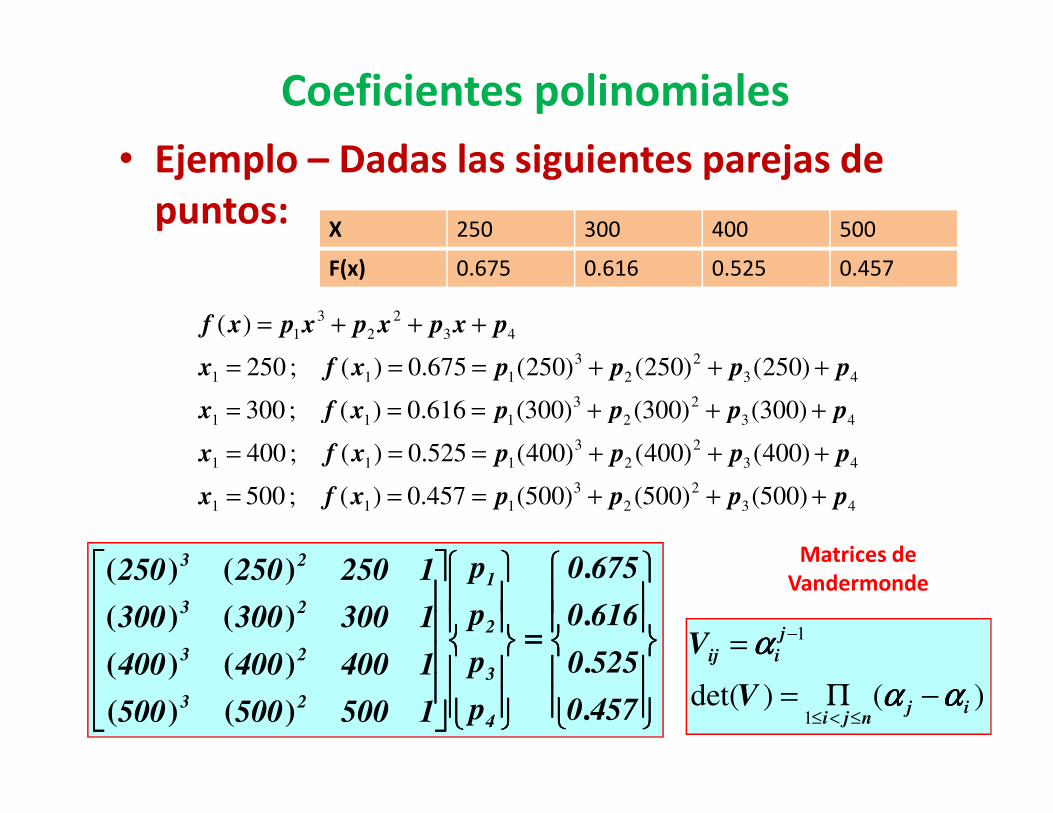
• Ejemplo – Dadas las siguientes parejas de puntos:
23
43
2
2
3
111
43
2
2
3
1
)300()300()300(616.0)( ; 300
)250()250()250(675.0)( ; 250
)(
ppppxfx
ppppxfx
pxpxpxpxf
+++===
+++===
+++=
Coeficientes polinomiales
X 250 300 400 500
F(x) 0.675 0.616 0.525 0.457
43
2
2
3
111
43
2
2
3
111
43
2
2
3
111
)500()500()500(457.0)( ; 500
)400()400()400(525.0)( ; 400
)300()300()300(616.0)( ; 300
ppppxfx
ppppxfx
ppppxfx
+++===
+++===
+++===
====
4570
5250
6160
6750
p
p
p
p
1500500500
1400400400
1300300300
1250250250
4
3
2
1
23
23
23
23
.
.
.
.
)()(
)()(
)()(
)()(Matrices de
Vandermonde
)()det(1
1
ijnji
j
iij
V
V
αααααααα
αααα
−Π=
=
≤<≤
−
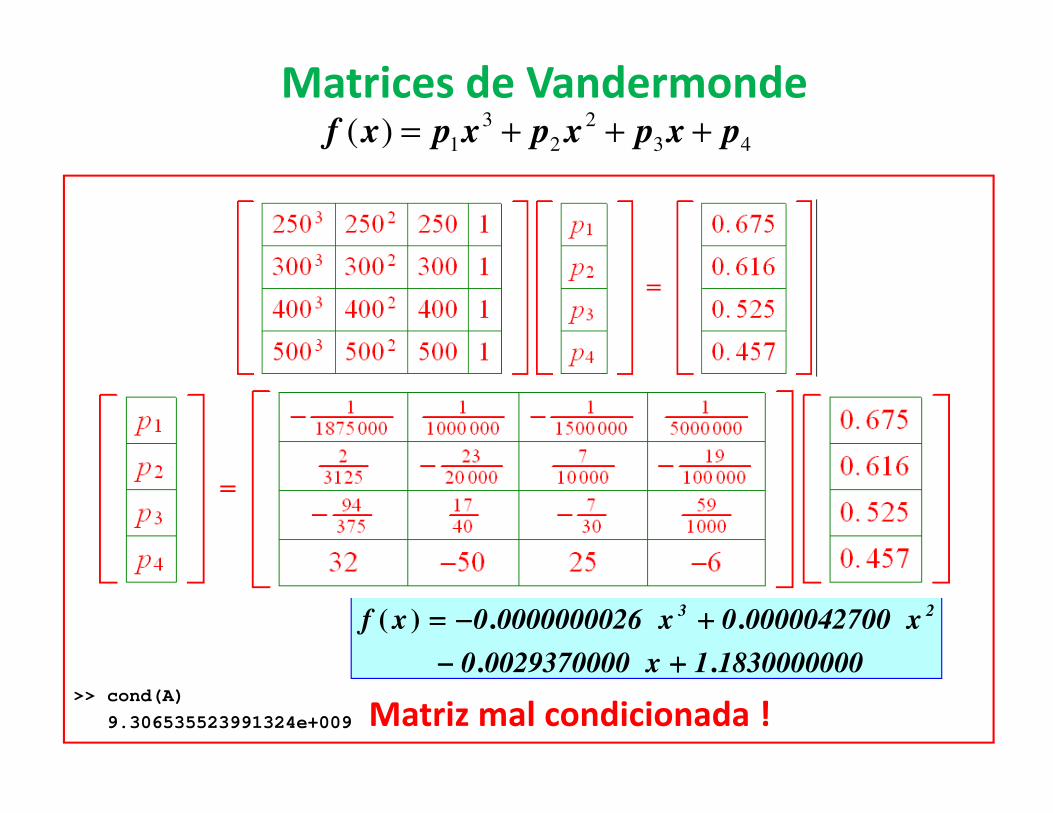
Matrices de Vandermonde43
2
2
3
1)( pxpxpxpxf +++=
>> cond(A)
9.306535523991324e+009 Matriz mal condicionada !
18300000001x00293700000
x00000427000x00000000260xf 23
..
..)(
++++−−−−
++++−−−−====
• Utilizar las “diferencias divididas” de Newton para los valores de la función.
)())((
))(()()( 2131211n xxxxbxxbbxf −−−−
−−−−−−−−−−−−++++
++++−−−−−−−−++++−−−−++++==== L
Polinomios de interpolación de Newton
• Los coeficientes de menor orden bi no cambian cuando se incrementa el orden de la interpolación
• Es fácil adicionar datos y conseguir un polinomio de mayor orden.
)())(( 1n21n xxxxxxb −−−−−−−−−−−−−−−−++++ L
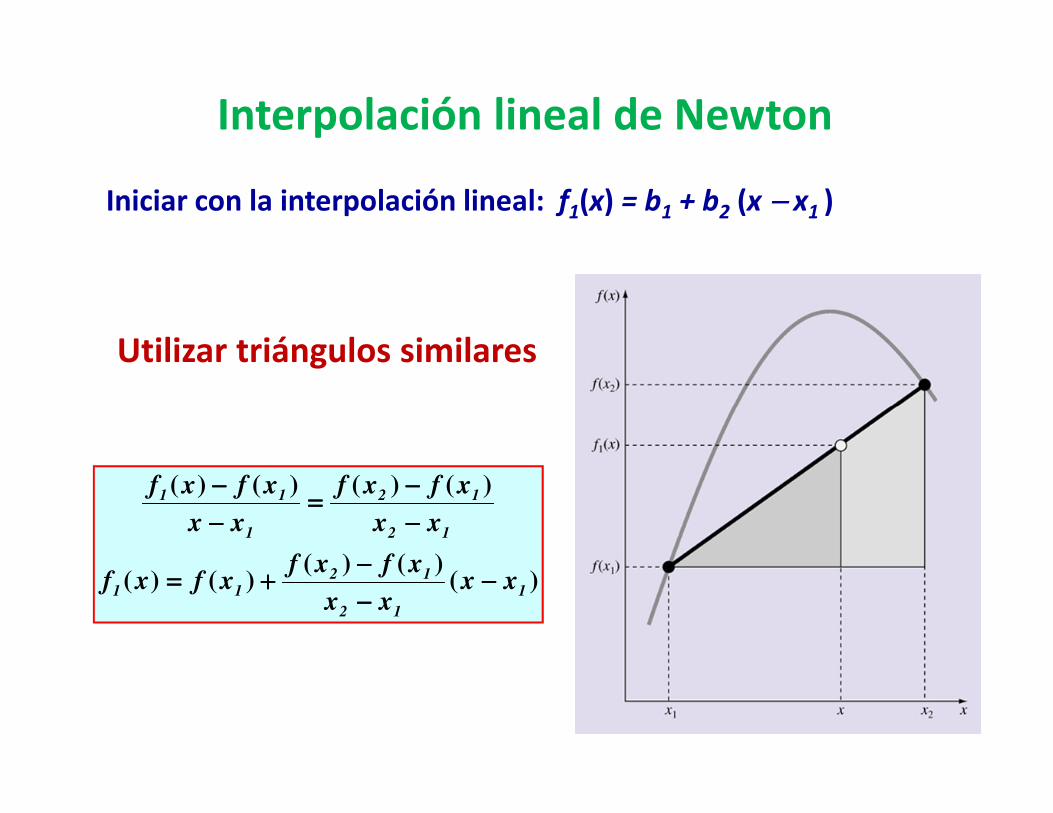
Iniciar con la interpolación lineal: f1(x) = b1 + b2 (x −−−− x1 )
Utilizar triángulos similares
Interpolación lineal de Newton
)()()(
)()(
)()()()(
1
12
1211
12
12
1
11
xxxx
xfxfxfxf
xx
xfxf
xx
xfxf
−−−−−−−−
−−−−++++====
−−−−
−−−−====
−−−−
−−−−
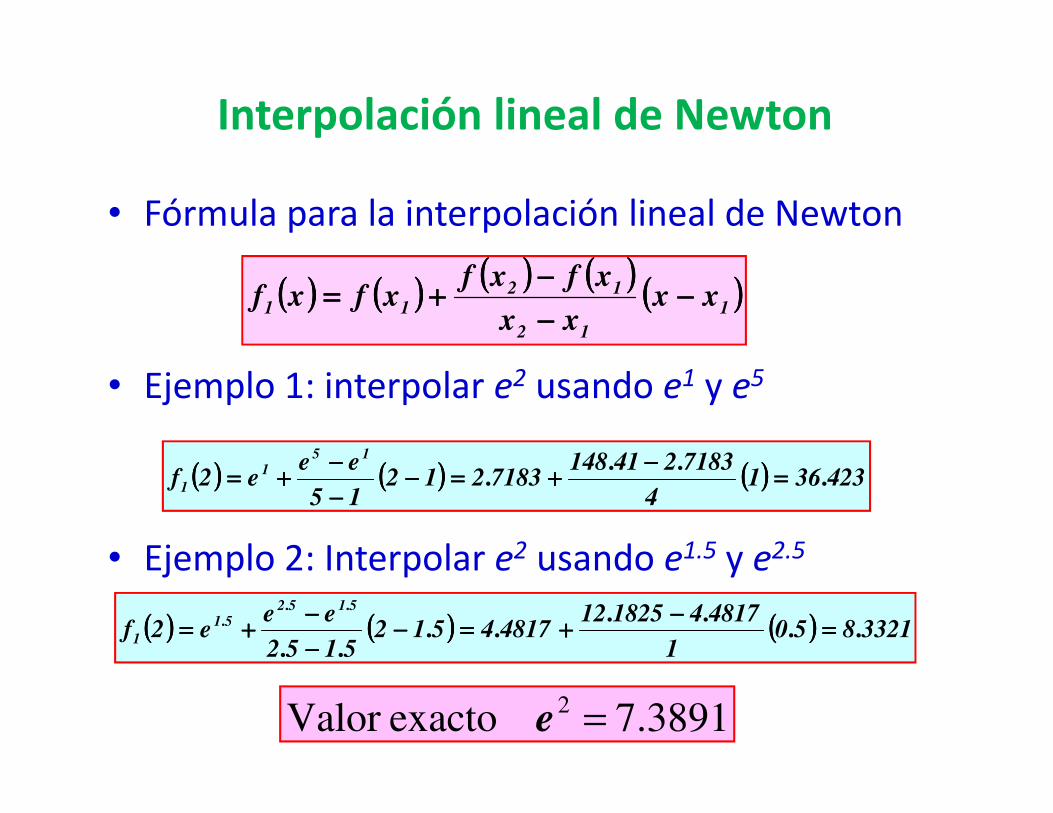
• Fórmula para la interpolación lineal de Newton
• Ejemplo 1: interpolar e2 usando e1 y e5
(((( )))) (((( ))))(((( )))) (((( )))) (((( ))))1
12
1211 xx
xx
xfxfxfxf −−−−
−−−−
−−−−++++====
Interpolación lineal de Newton
• Ejemplo 2: Interpolar e2 usando e1.5 y e2.5
(((( )))) (((( )))) (((( )))) 4233614
71832411487183212
15
eee2f
151
1 ...
. ====−−−−
++++====−−−−−−−−
−−−−++++====
(((( )))) (((( )))) (((( )))) 33218501
4817418251248174512
5152
eee2f
515251
1 ....
....
... ====
−−−−++++====−−−−
−−−−
−−−−++++====
3891.7 exactoValor 2 =e
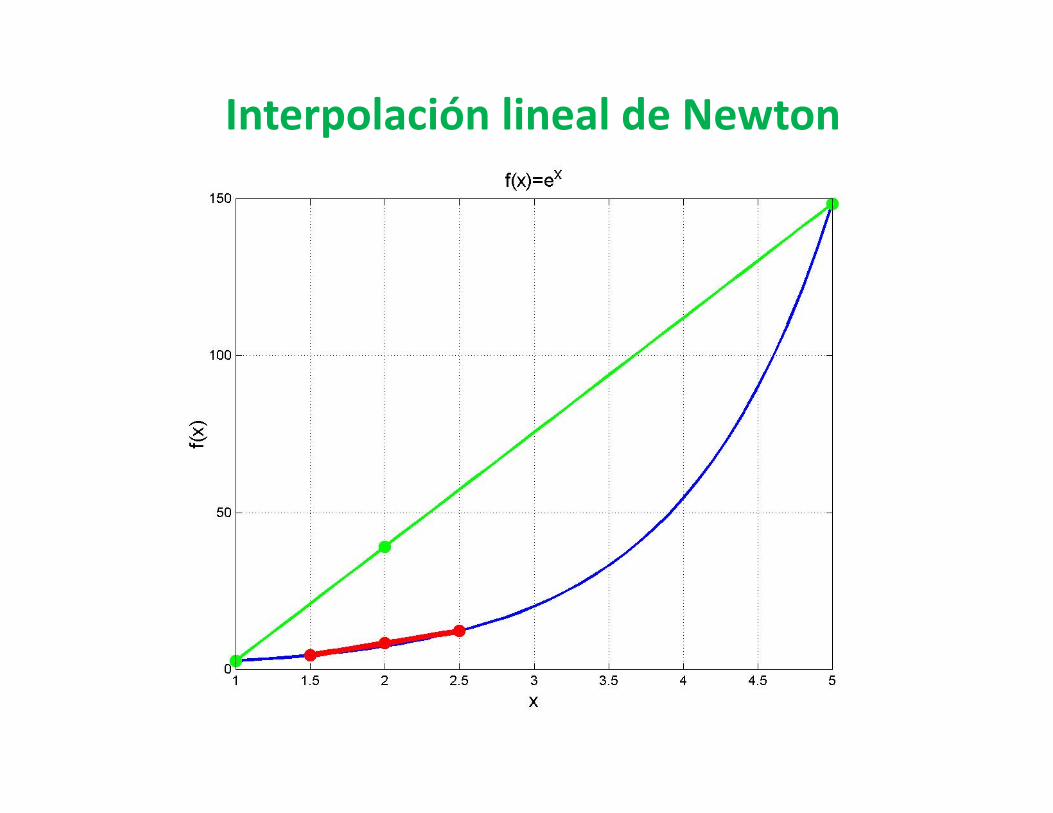
Interpolación lineal de Newton
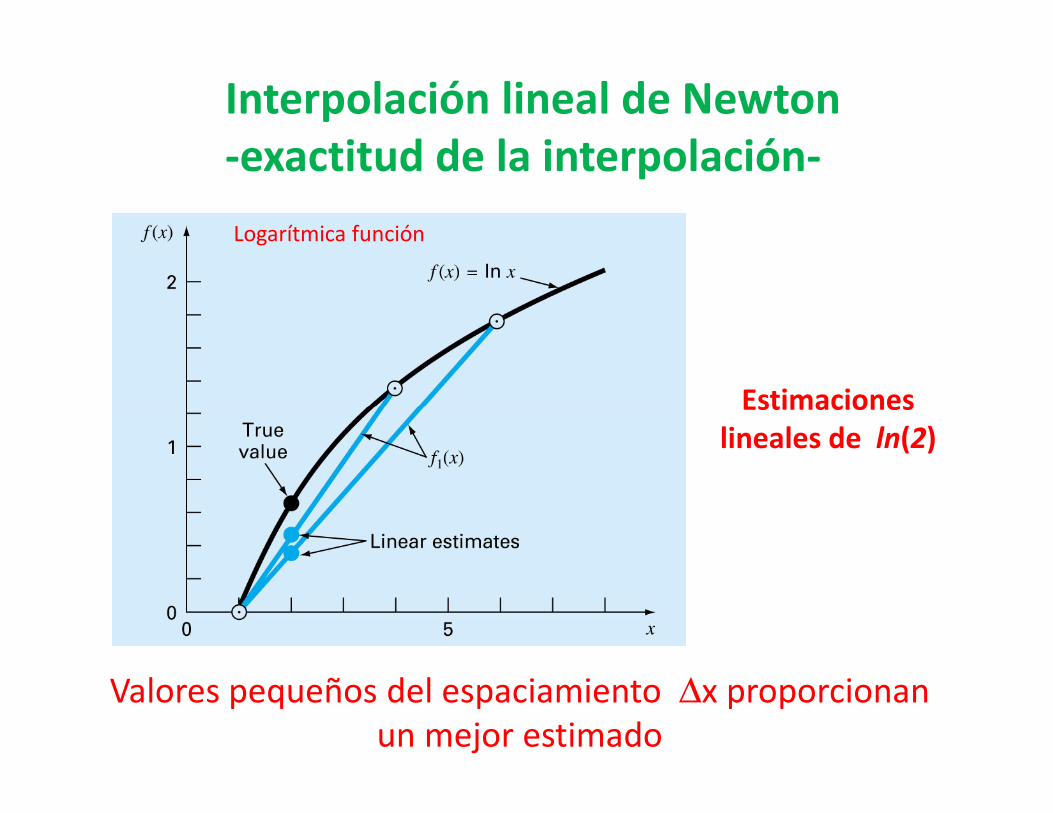
Estimaciones
Logarítmica función
Interpolación lineal de Newton-exactitud de la interpolación-
Valores pequeños del espaciamiento ∆x proporcionan
un mejor estimado
Estimaciones lineales de ln(2)
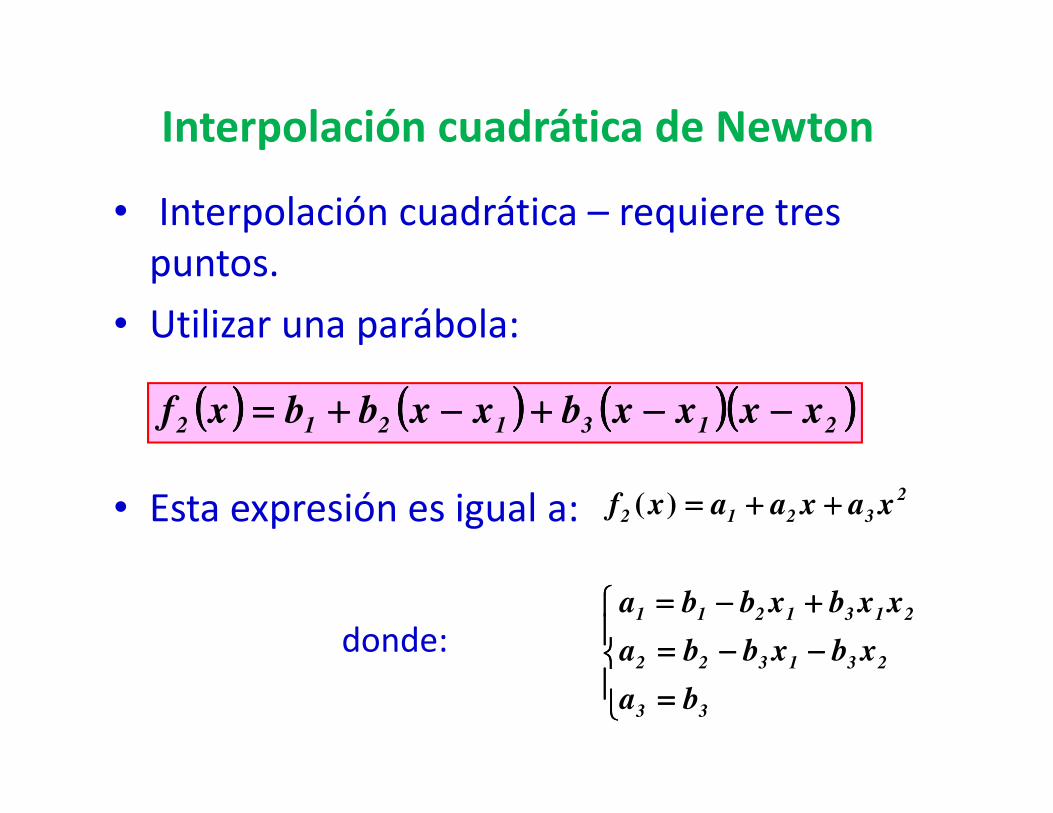
• Interpolación cuadrática – requiere tres
puntos.
• Utilizar una parábola:
(((( )))) (((( )))) (((( ))))(((( ))))xxxxbxxbbxf −−−−−−−−++++−−−−++++====
Interpolación cuadrática de Newton
• Esta expresión es igual a:
(((( )))) (((( )))) (((( ))))(((( ))))2131212 xxxxbxxbbxf −−−−−−−−++++−−−−++++====
====
−−−−−−−−====
++++−−−−====
++++++++====
33
231322
2131211
2
3212
ba
xbxbba
xxbxbba
xaxaaxf )(
donde:
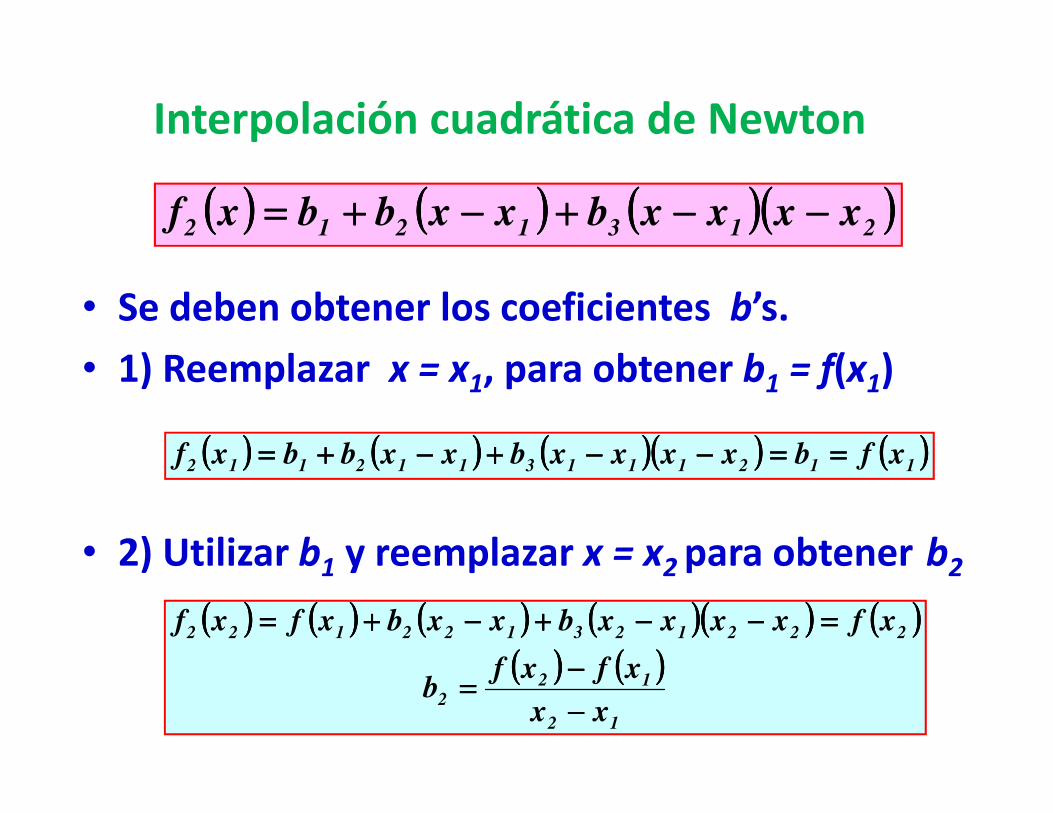
• Se deben obtener los coeficientes b’s.
• 1) Reemplazar x = x1, para obtener b1 = f(x1)
(((( )))) (((( )))) (((( ))))(((( ))))2131212 xxxxbxxbbxf −−−−−−−−++++−−−−++++====
Interpolación cuadrática de Newton
• 2) Utilizar b1 y reemplazar x = x2 para obtener b2
(((( )))) (((( )))) (((( ))))(((( )))) (((( ))))1121113112112 xfbxxxxbxxbbxf ========−−−−−−−−++++−−−−++++====
(((( )))) (((( )))) (((( )))) (((( ))))(((( )))) (((( ))))(((( )))) (((( ))))
12
122
222123122122
xx
xfxfb
xfxxxxbxxbxfxf
−−−−
−−−−====
====−−−−−−−−++++−−−−++++====
(((( )))) (((( ))))(((( )))) (((( )))) (((( )))) (((( ))))(((( )))) (((( ))))
(((( )))) (((( )))) (((( )))) (((( ))))1223
32313313
12
12132
xfxfxfxf
xfxxxxbxxxx
xfxfxfxf
−−−−−−−−
−−−−
====−−−−−−−−++++−−−−−−−−
−−−−++++====
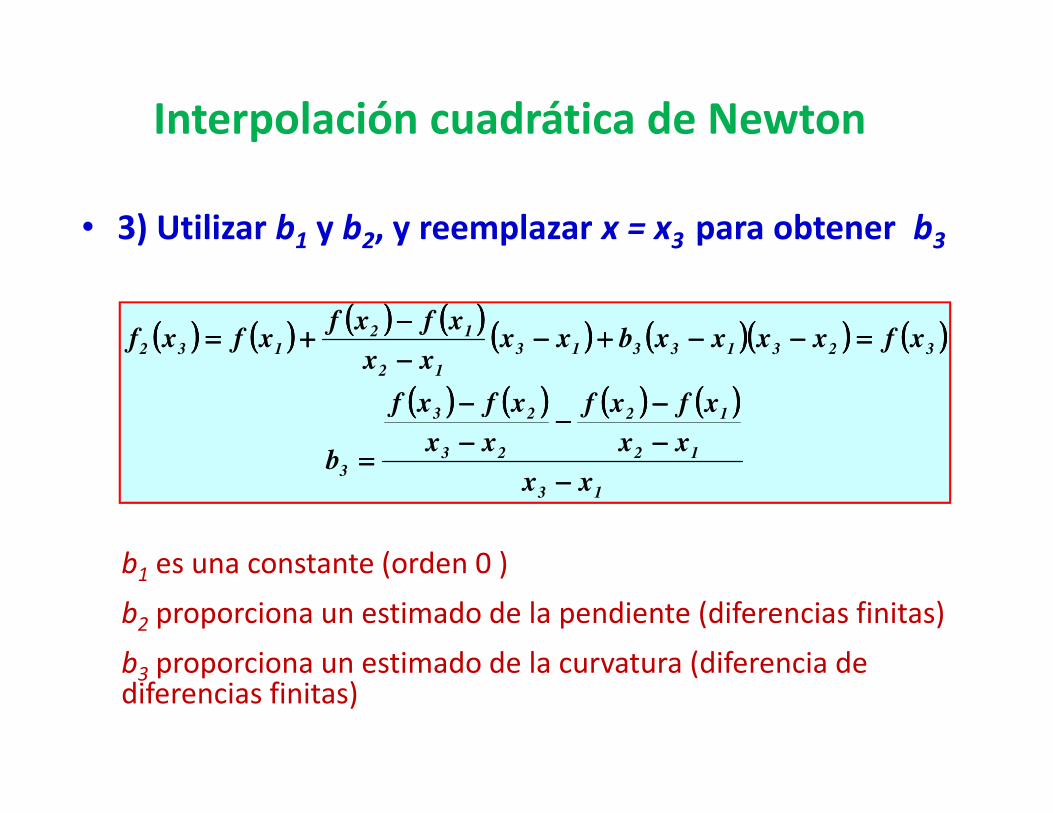
• 3) Utilizar b1 y b2, y reemplazar x = x3 para obtener b3
Interpolación cuadrática de Newton
(((( )))) (((( )))) (((( )))) (((( ))))
13
12
12
23
23
3xx
xx
xfxf
xx
xfxf
b−−−−
−−−−
−−−−−−−−
−−−−
−−−−
====
b1 es una constante (orden 0 )
b2 proporciona un estimado de la pendiente (diferencias finitas)
b3 proporciona un estimado de la curvatura (diferencia de diferencias finitas)
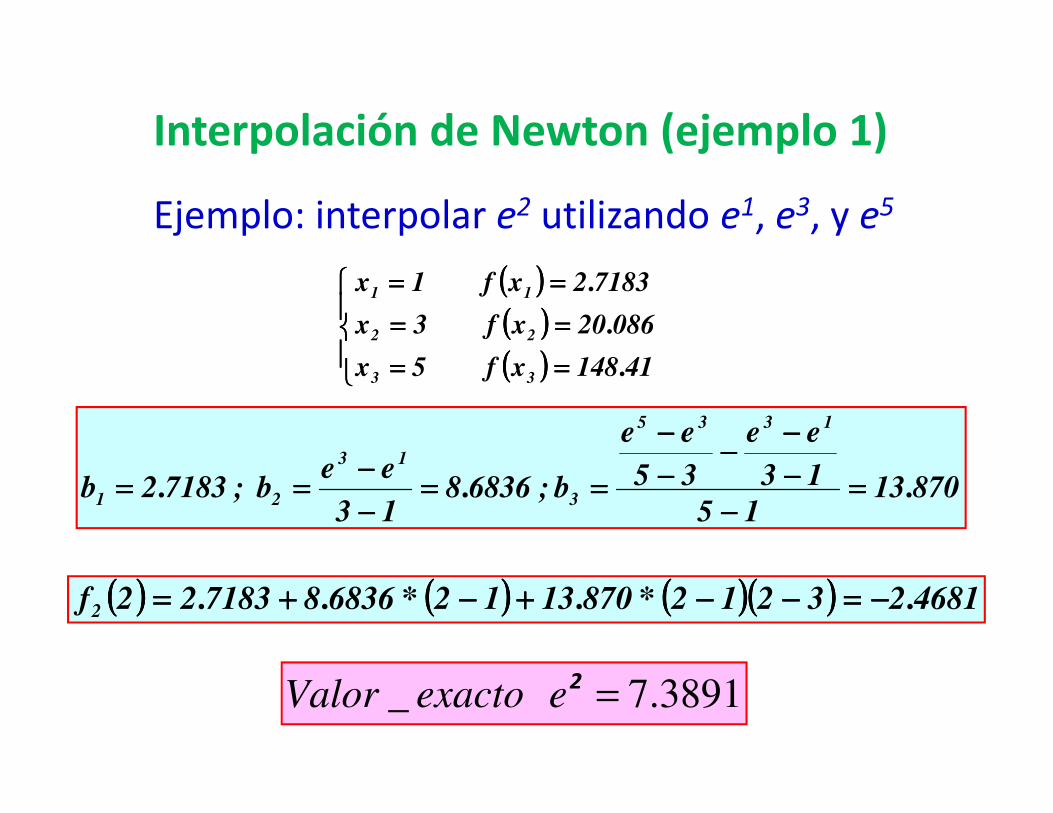
Ejemplo: interpolar e2 utilizando e1, e3, y e5
(((( ))))(((( ))))(((( ))))
41148xf 5x
08620xf 3x
71832xf 1x
33
22
11
========
========
========
.
.
.
Interpolación de Newton (ejemplo 1)
8701315
13
ee
35
ee
b ;6836813
eeb ;71832b
1335
3
13
21 ... ====−−−−
−−−−
−−−−−−−−
−−−−
−−−−
========−−−−
−−−−========
(((( )))) (((( )))) (((( ))))(((( )))) 468123212870131268368718322f2 .*.*.. −−−−====−−−−−−−−++++−−−−++++====
3891.7_ =2 eexactoValor
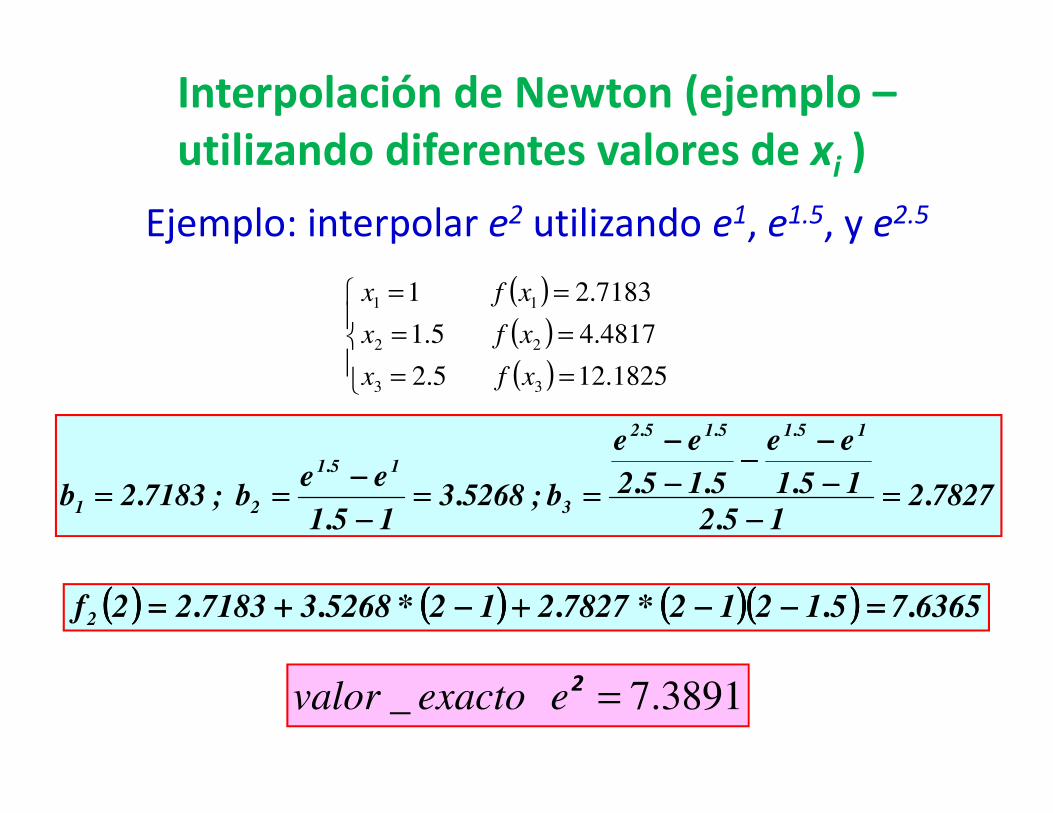
Ejemplo: interpolar e2 utilizando e1, e1.5, y e2.5
( )( )( )
==
==
==
1825.125.2
4817.45.1
7183.21
33
22
11
xfx
xfx
xfx
Interpolación de Newton (ejemplo –utilizando diferentes valores de xi )
78272152
151
ee
5152
ee
b ;52683151
eeb ;71832b
1515152
3
151
21 ..
.....
.
...
.
====−−−−
−−−−
−−−−−−−−
−−−−
−−−−
========−−−−
−−−−========
(((( )))) (((( )))) (((( ))))(((( )))) 6365751212782721252683718322f2 ..*.*.. ====−−−−−−−−++++−−−−++++====
3891.7_ =2 eexactovalor
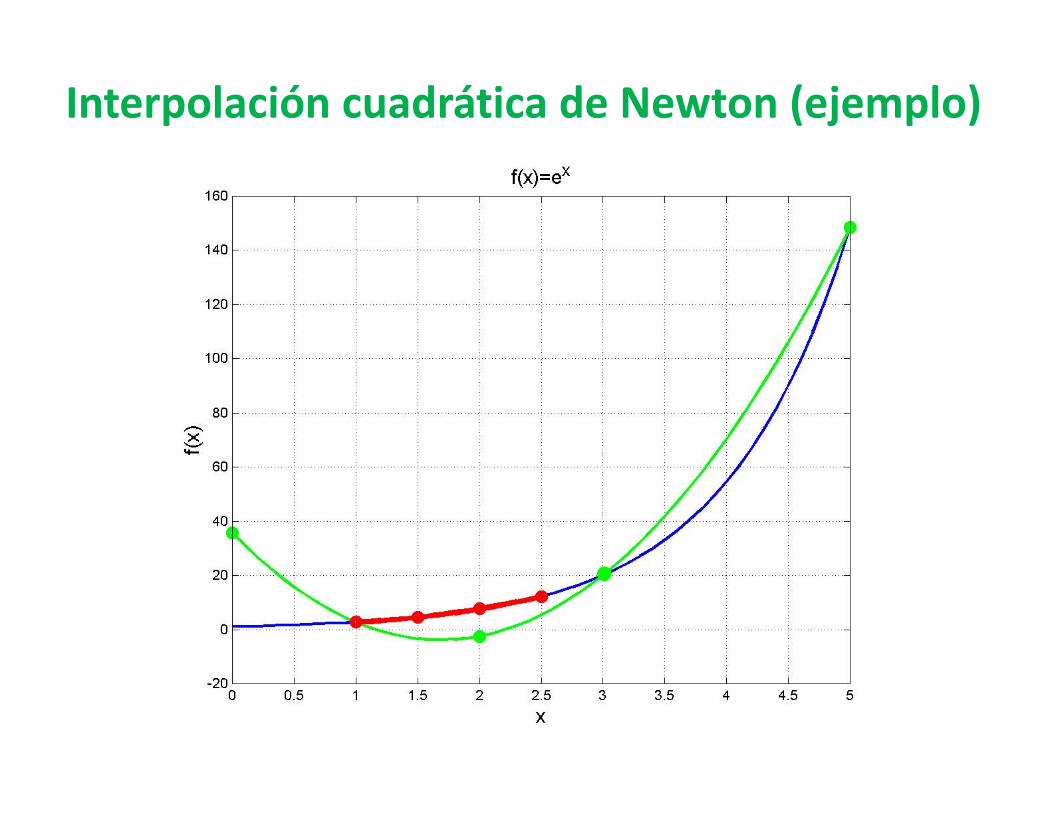
Interpolación cuadrática de Newton (ejemplo)
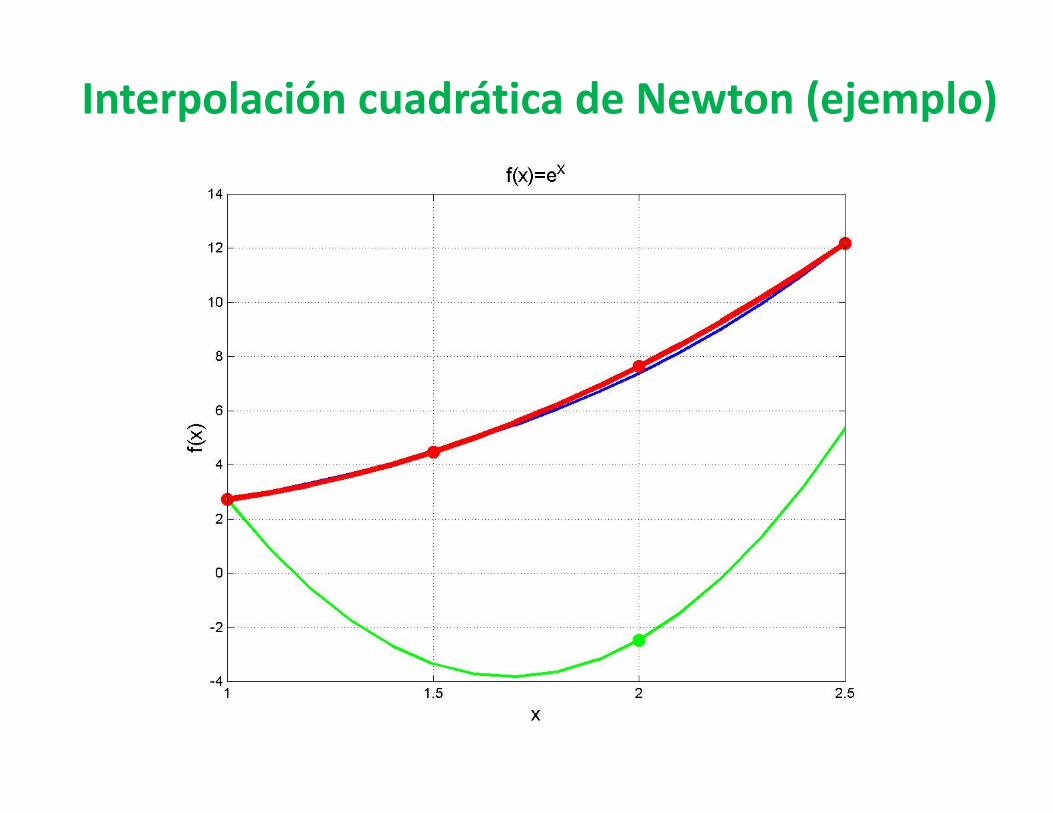
Interpolación cuadrática de Newton (ejemplo)
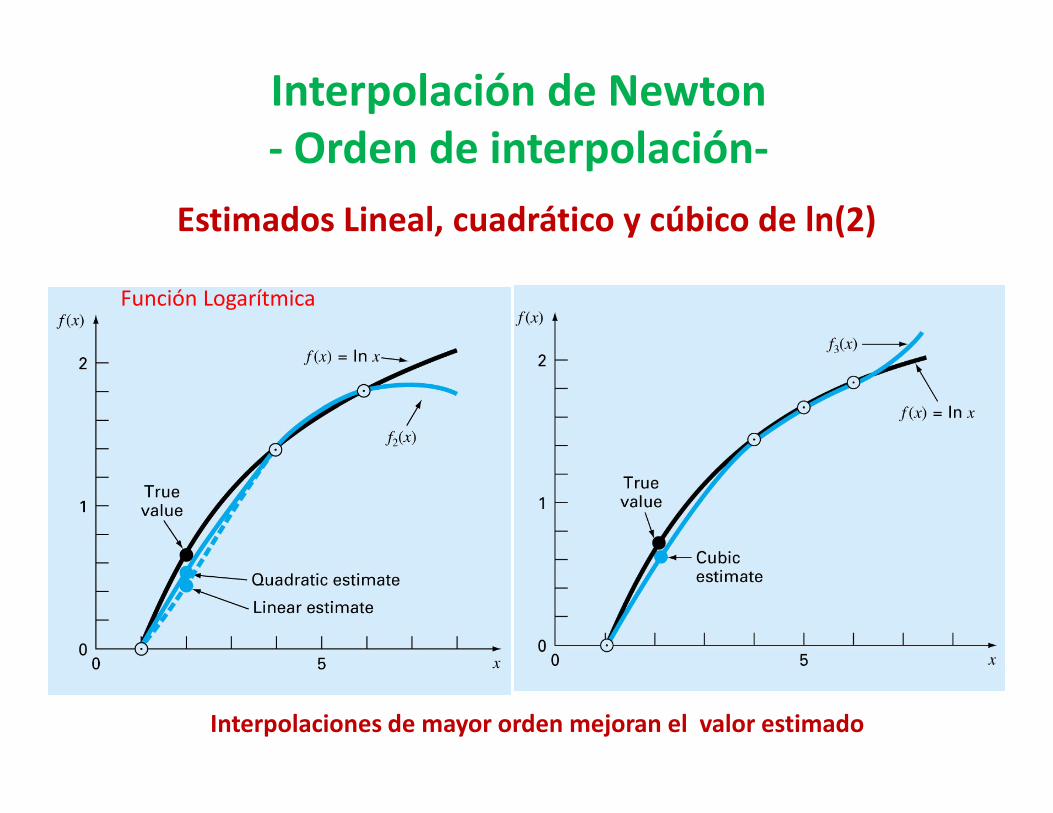
Estimados Lineal, cuadrático y cúbico de ln(2)
Función Logarítmica
Interpolación de Newton - Orden de interpolación-
Interpolaciones de mayor orden mejoran el valor estimado
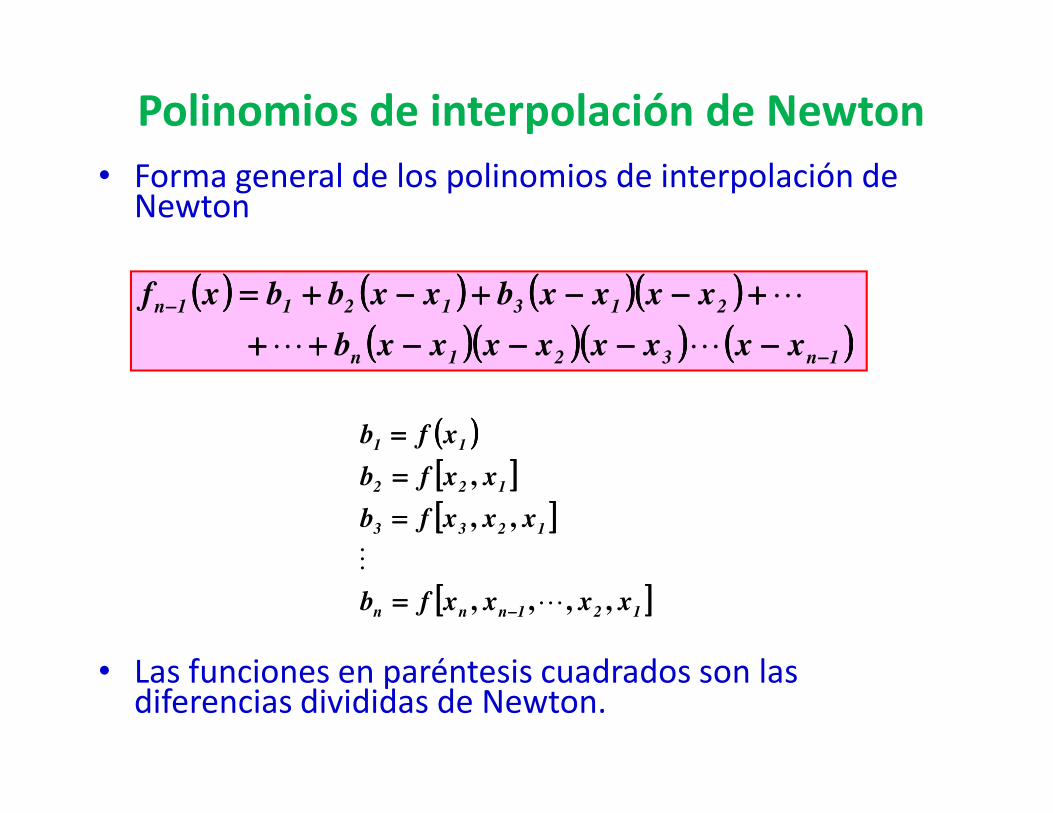
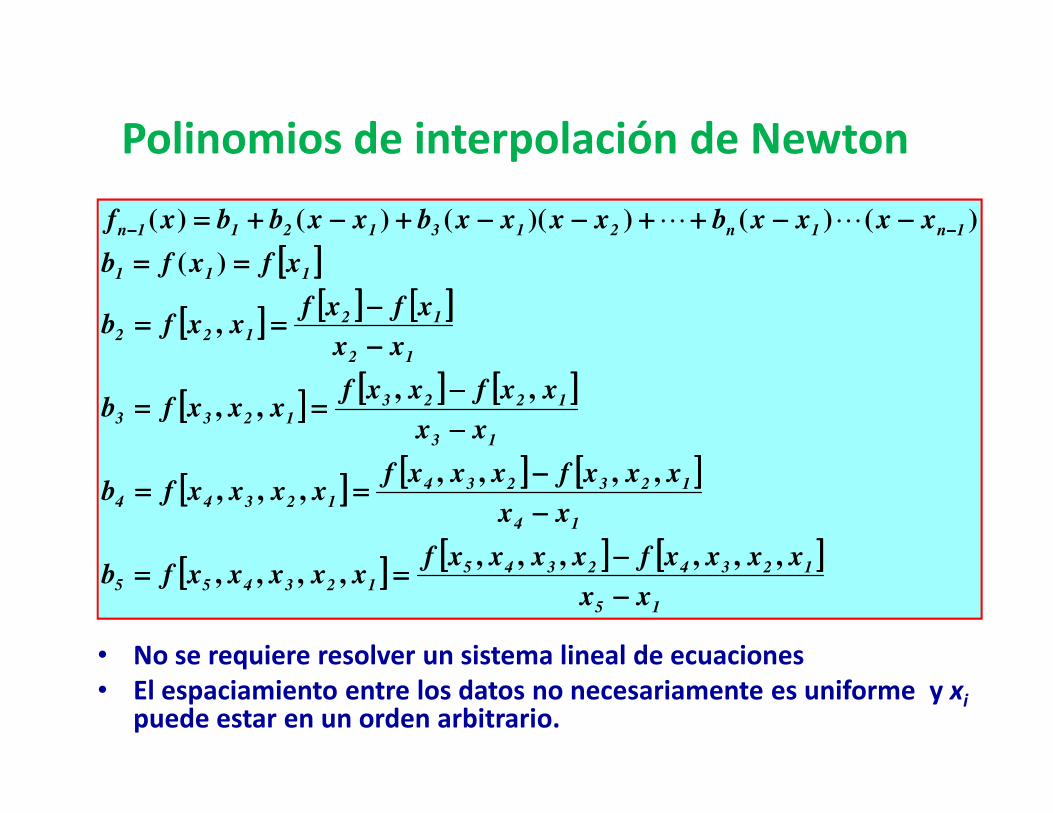
• Forma general de los polinomios de interpolación de Newton
(((( )))) (((( )))) (((( ))))(((( ))))(((( ))))(((( ))))(((( )))) (((( )))) xxxxxxxxb
xxxxbxxbbxf
1n321n
2131211n
−−−−
−−−−
−−−−−−−−−−−−−−−−++++++++
++++−−−−−−−−++++−−−−++++====
LL
L
Polinomios de interpolación de Newton
• Las funciones en paréntesis cuadrados son las diferencias divididas de Newton.
(((( ))))[[[[ ]]]][[[[ ]]]]
[[[[ ]]]]121nnn
1233
122
11
xxxxfb
xxxfb
xxfb
xfb
,,,,
,,
,
L
M
−−−−====
====
====
====
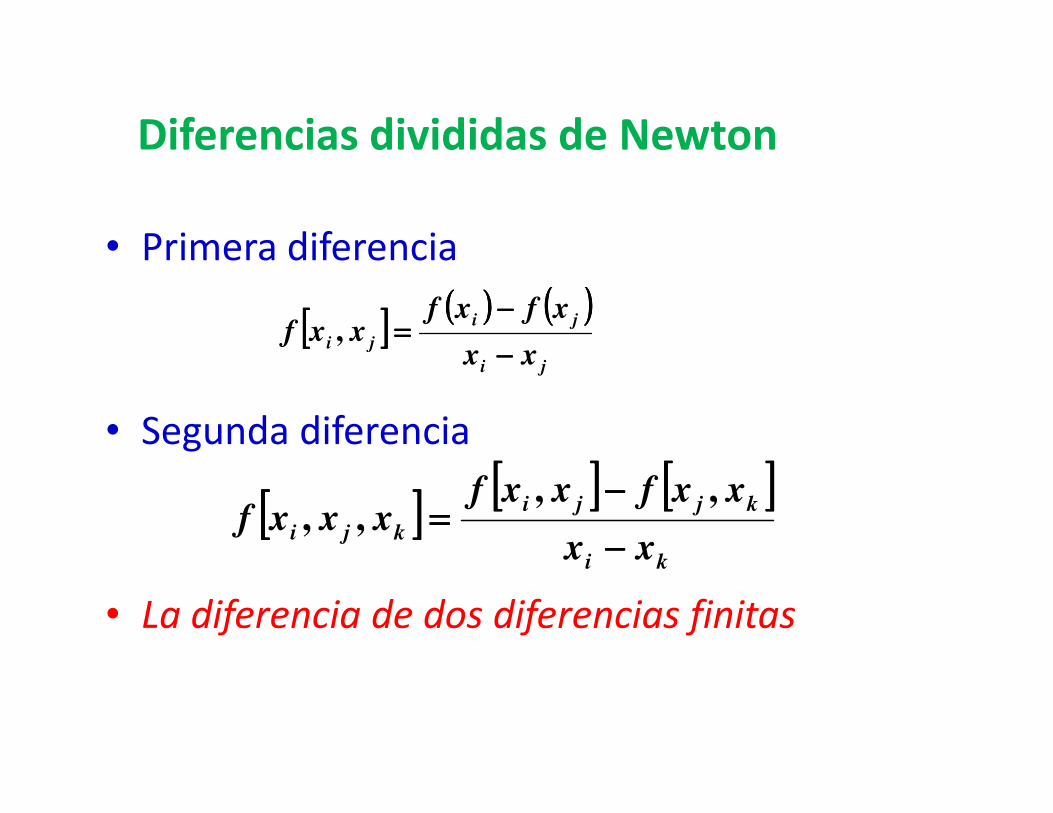
• Primera diferencia
• Segunda diferencia
[[[[ ]]]](((( )))) (((( ))))
ji
ji
jixx
xfxfxxf
−−−−
−−−−====,
Diferencias divididas de Newton
• Segunda diferencia
• La diferencia de dos diferencias finitas
[[[[ ]]]][[[[ ]]]] [[[[ ]]]]
ki
kjji
kjixx
xxfxxfxxxf
−−−−
−−−−====
,,,,
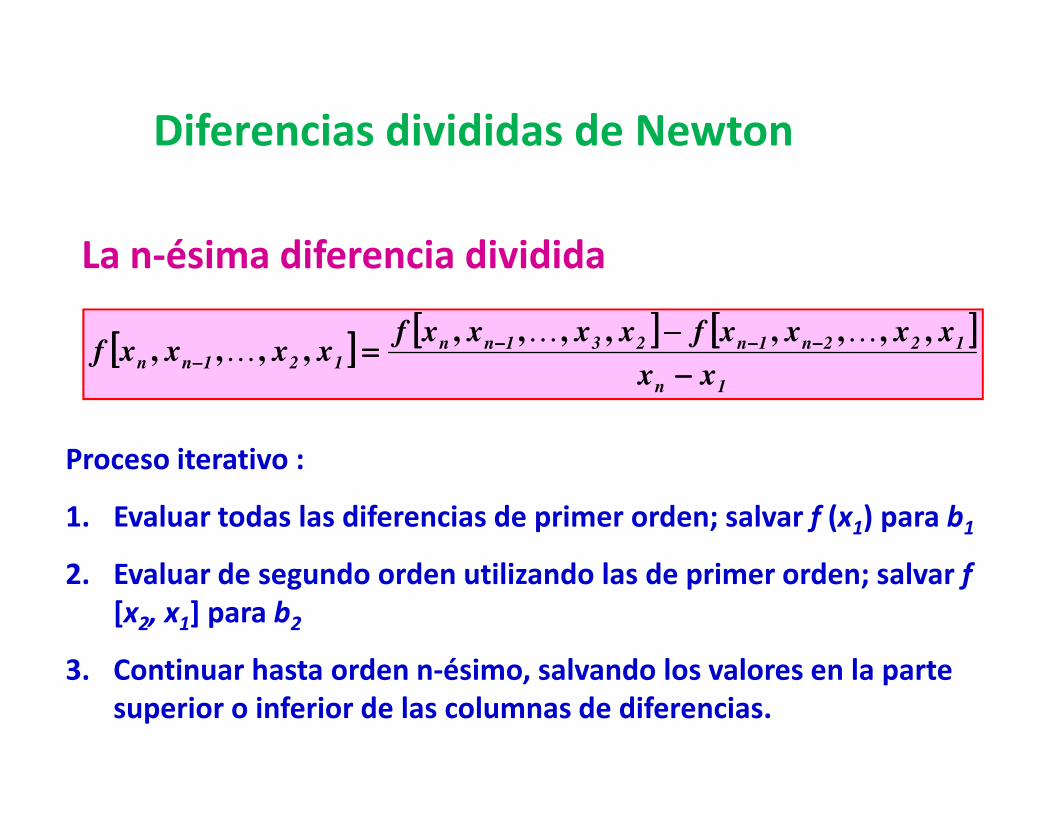
La n-ésima diferencia dividida
[[[[ ]]]][[[[ ]]]] [[[[ ]]]]
1n
122n1n231nn121nn
xx
xxxxfxxxxfxxxxf
−−−−
−−−−==== −−−−−−−−−−−−
−−−−
,,,,,,,,,,,,
KKK
Diferencias divididas de Newton
Proceso iterativo :
1. Evaluar todas las diferencias de primer orden; salvar f (x1) para b1
2. Evaluar de segundo orden utilizando las de primer orden; salvar f [x2, x1] para b2
3. Continuar hasta orden n-ésimo, salvando los valores en la parte superior o inferior de las columnas de diferencias.
[[[[ ]]]]
[[[[ ]]]] [[[[ ]]]] [[[[ ]]]]
[[[[ ]]]] [[[[ ]]]] [[[[ ]]]]1223
12
12122
111
1n1n2131211n
x xfx xfx xxfb
xx
xfxfx xfb
xfxfb
xxxxbxxxxbxxbbxf
−−−−========
−−−−
−−−−========
========
−−−−−−−−++++++++−−−−−−−−++++−−−−++++==== −−−−−−−−
,,,,
,
)(
)()())(()()( LL
Polinomios de interpolación de Newton
[[[[ ]]]]
[[[[ ]]]] [[[[ ]]]] [[[[ ]]]]
[[[[ ]]]] [[[[ ]]]] [[[[ ]]]]
15
12342345123455
14
12323412344
13
12231233
xx
xx xxfxx xxfxx xxxfb
xx
xx xfxx xfxx xxfb
xxx xxfb
−−−−
−−−−========
−−−−
−−−−========
−−−−========
,,,,,,,,,,
,,,,,,,
,,
• No se requiere resolver un sistema lineal de ecuaciones• El espaciamiento entre los datos no necesariamente es uniforme y xi
puede estar en un orden arbitrario.
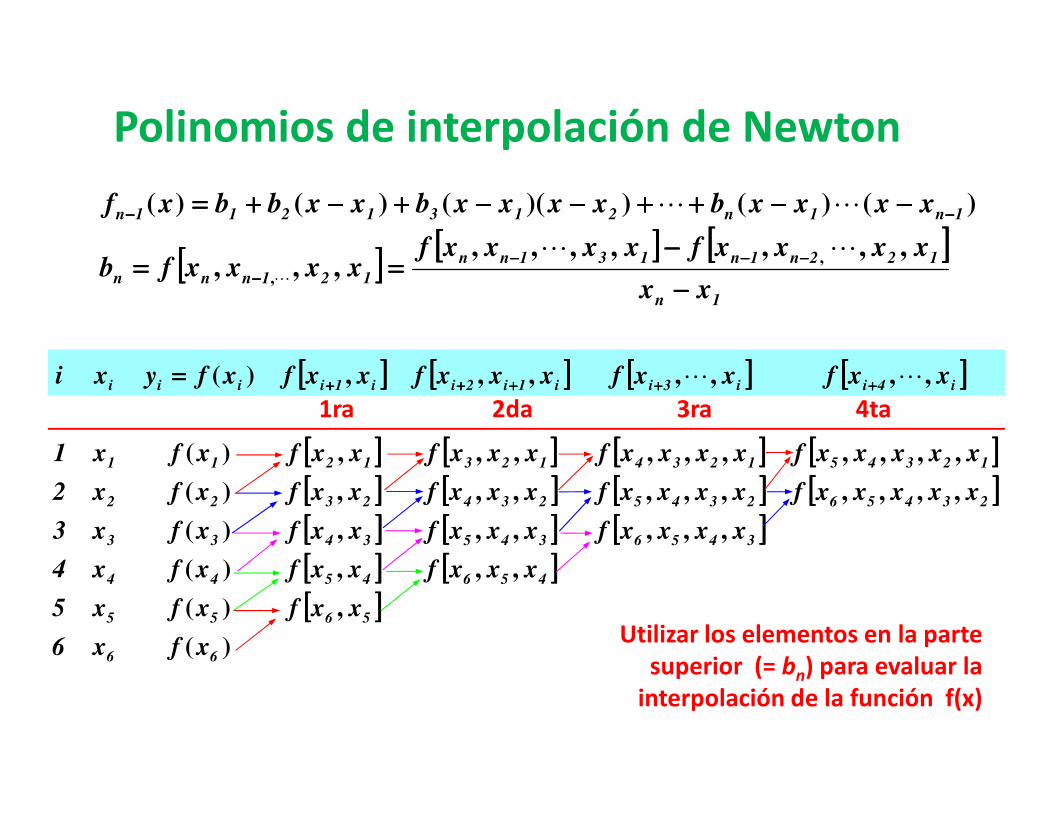
[[[[ ]]]] [[[[ ]]]] [[[[ ]]]] [[[[ ]]]],,,,,,,)( i4ii3ii1i2ii1iiii xxfxxfxxxfxxfxfyxi LL ++++++++++++++++++++====
[[[[ ]]]][[[[ ]]]] [[[[ ]]]]
1n
122n1n131nn
121nnn
1n1n2131211n
xx
x xxxfx xxxfx xxxfb
xxxxbxxxxbxxbbxf
−−−−
−−−−========
−−−−−−−−++++++++−−−−−−−−++++−−−−++++====
−−−−−−−−−−−−
−−−−
−−−−−−−−
,,,,,,,,,,
)()())(()()(
,
,
LL
LL
L
1ra 2da 3ra 4ta
Polinomios de interpolación de Newton
[[[[ ]]]] [[[[ ]]]] [[[[ ]]]] [[[[ ]]]][[[[ ]]]] [[[[ ]]]] [[[[ ]]]] [[[[ ]]]][[[[ ]]]] [[[[ ]]]] [[[[ ]]]][[[[ ]]]] [[[[ ]]]][[[[ ]]]]
)(
,)(
,,,)(
,,,,,,)(
,,,,,,,,,,)(
,,,,,,,,,,)(
66
5655
4564544
34563453433
2345623452342322
1234512341231211
xfx6
xxfxfx5
xxxfxxfxfx4
xxxxfxxxfxxfxfx3
xxxxxfxxxxfxxxfxxfxfx2
xxxxxfxxxxfxxxfxxfxfx1
Utilizar los elementos en la parte superior (= bn) para evaluar la
interpolación de la función f(x)
1ra 2da 3ra 4ta
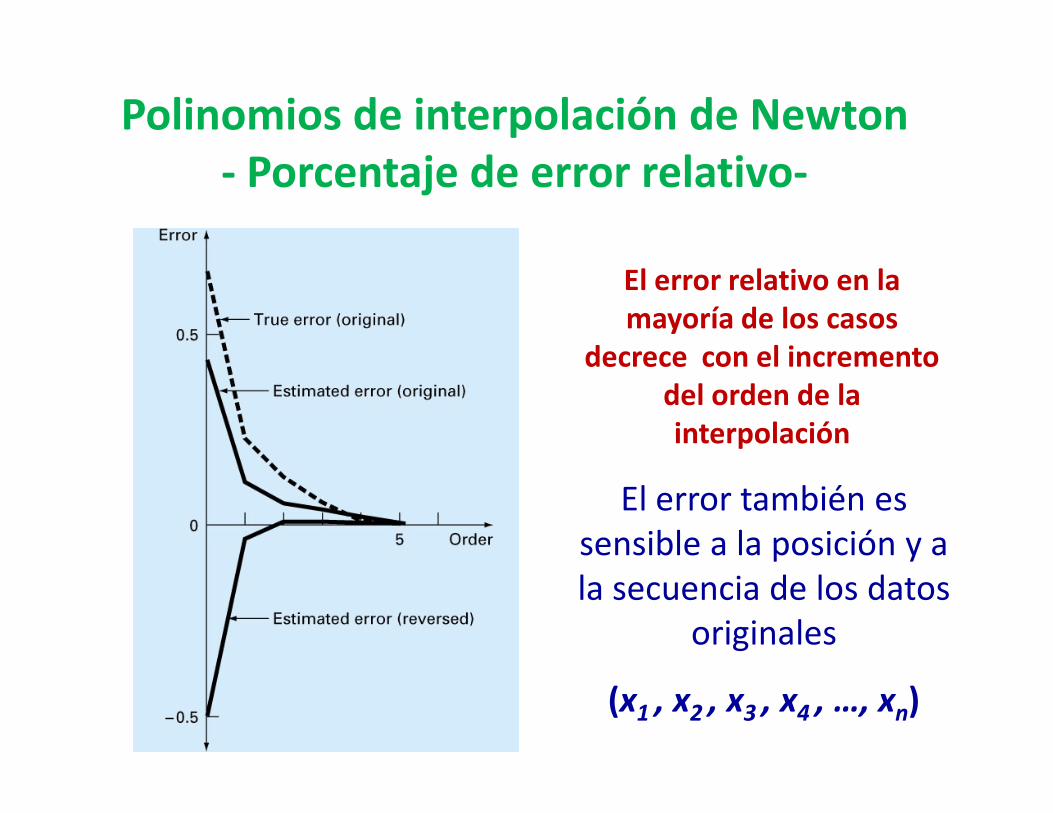
El error relativo en la mayoría de los casos
decrece con el incremento del orden de la
Polinomios de interpolación de Newton- Porcentaje de error relativo-
del orden de la interpolación
El error también es
sensible a la posición y a
la secuencia de los datos
originales
(x1 , x2 , x3 , x4 , …, xn)
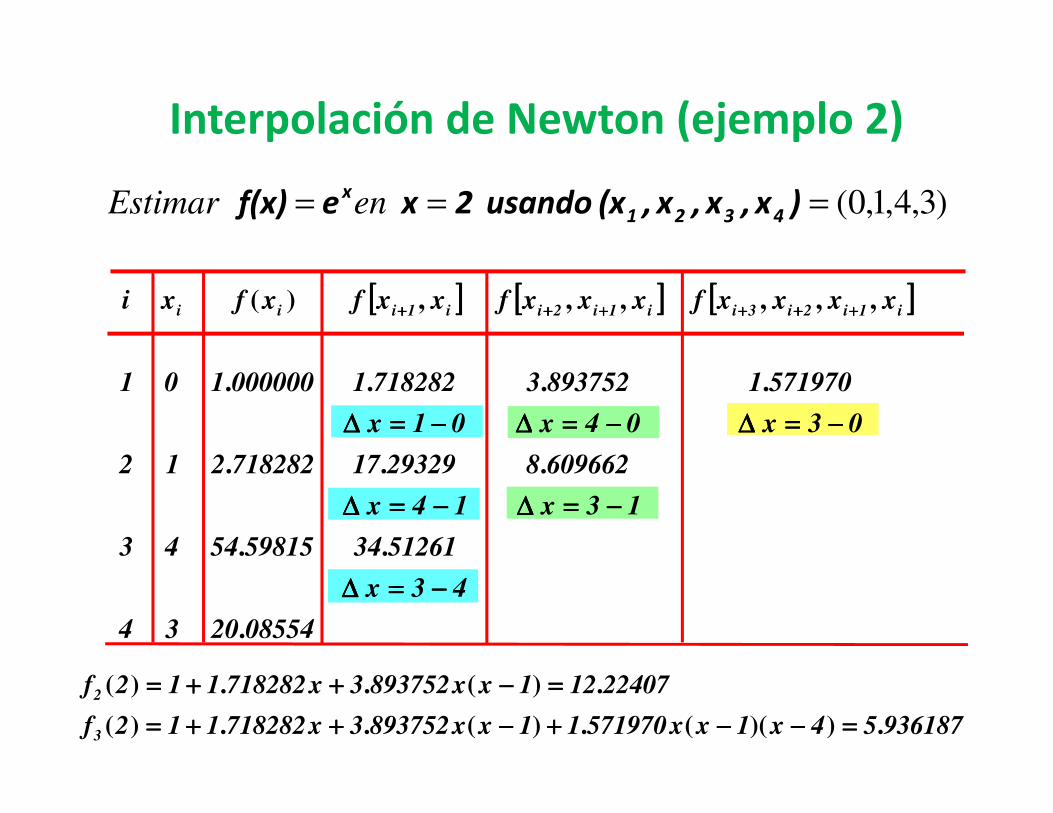
)3,4,1,0(=== )x,x,x,(x usando 2x ef(x) 4321
xenEstimar
[[[[ ]]]] [[[[ ]]]] [[[[ ]]]]
571970189375237182821000000101
xxxxfxxxfxxfxfxi i1i2i3ii1i2ii1iii
....
,,,,,,)(
−−−−====∆∆∆∆−−−−====∆∆∆∆−−−−====∆∆∆∆
++++++++++++++++++++++++
Interpolación de Newton (ejemplo 2)
93618754x1xx57197011xx8937523x718282112f
22407121xx8937523x718282112f
3
2
.))((.)(..)(
.)(..)(
====−−−−−−−−++++−−−−++++++++====
====−−−−++++++++====
085542034
43x
5126134598155443
13x 14x
60966282932917718282212
03x 04x 01x
.
..
...
−−−−====∆∆∆∆
−−−−====∆∆∆∆−−−−====∆∆∆∆
−−−−====∆∆∆∆−−−−====∆∆∆∆−−−−====∆∆∆∆
• El error para los polinomios de interpolación de Newton pueden ser estimado como:
[[[[ ]]]](((( ))))(((( )))) (((( ))))n2111nn1nn xxxxxxxxxxfR −−−−−−−−−−−−≅≅≅≅ −−−−++++ LK,,,,
Polinomios de interpolación de Newton- Estimados del error -
• El término un orden superior al orden del polinomio
• Muy similar al orden de truncamiento en los polinomios de Taylor
[[[[ ]]]](((( ))))(((( )))) (((( ))))n2111nn1nn xxxxxxxxxxfR −−−−−−−−−−−−≅≅≅≅ −−−−++++ LK,,,,
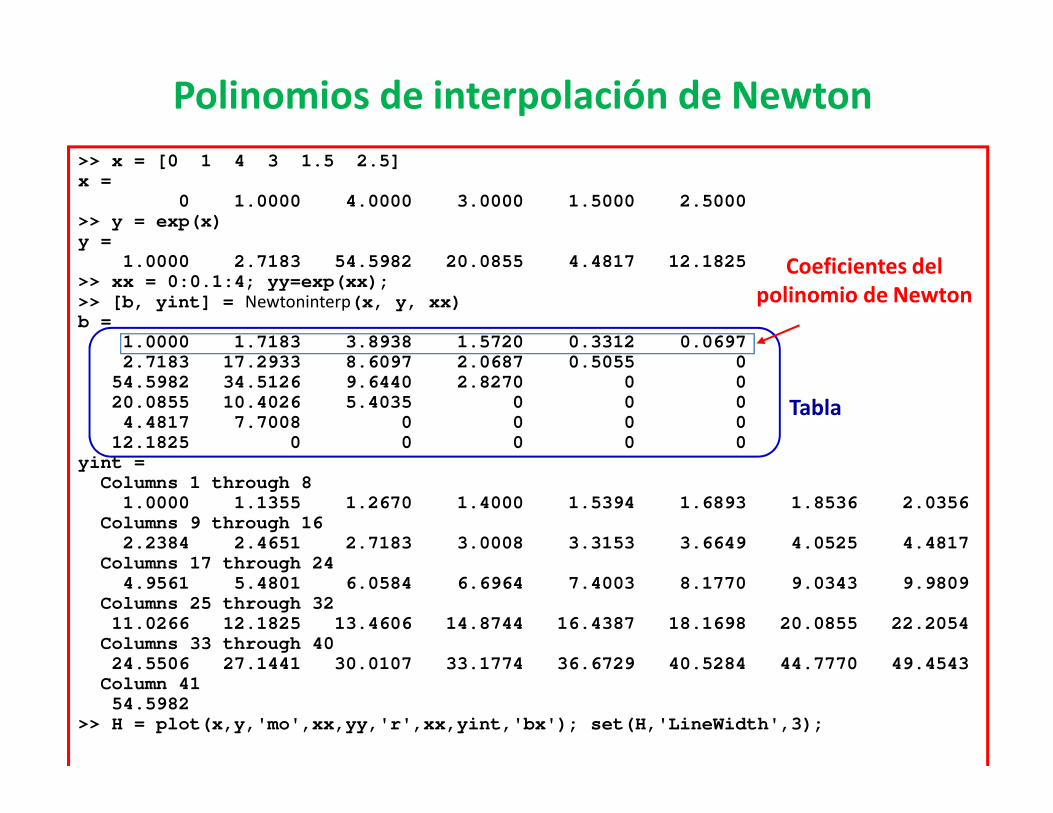
>> x = [0 1 4 3 1.5 2.5]
x =
0 1.0000 4.0000 3.0000 1.5000 2.5000
>> y = exp(x)
y =
1.0000 2.7183 54.5982 20.0855 4.4817 12.1825
>> xx = 0:0.1:4; yy=exp(xx);
>> [b, yint] = Newtoninterp(x, y, xx)b =
1.0000 1.7183 3.8938 1.5720 0.3312 0.0697
2.7183 17.2933 8.6097 2.0687 0.5055 0
54.5982 34.5126 9.6440 2.8270 0 0
20.0855 10.4026 5.4035 0 0 0 Tabla
Coeficientes del polinomio de Newton
Polinomios de interpolación de Newton
20.0855 10.4026 5.4035 0 0 0
4.4817 7.7008 0 0 0 0
12.1825 0 0 0 0 0
yint =
Columns 1 through 8
1.0000 1.1355 1.2670 1.4000 1.5394 1.6893 1.8536 2.0356
Columns 9 through 16
2.2384 2.4651 2.7183 3.0008 3.3153 3.6649 4.0525 4.4817
Columns 17 through 24
4.9561 5.4801 6.0584 6.6964 7.4003 8.1770 9.0343 9.9809
Columns 25 through 32
11.0266 12.1825 13.4606 14.8744 16.4387 18.1698 20.0855 22.2054
Columns 33 through 40
24.5506 27.1441 30.0107 33.1774 36.6729 40.5284 44.7770 49.4543
Column 41
54.5982
>> H = plot(x,y,'mo',xx,yy,'r',xx,yint,'bx'); set(H,'LineWidth',3);
Tabla
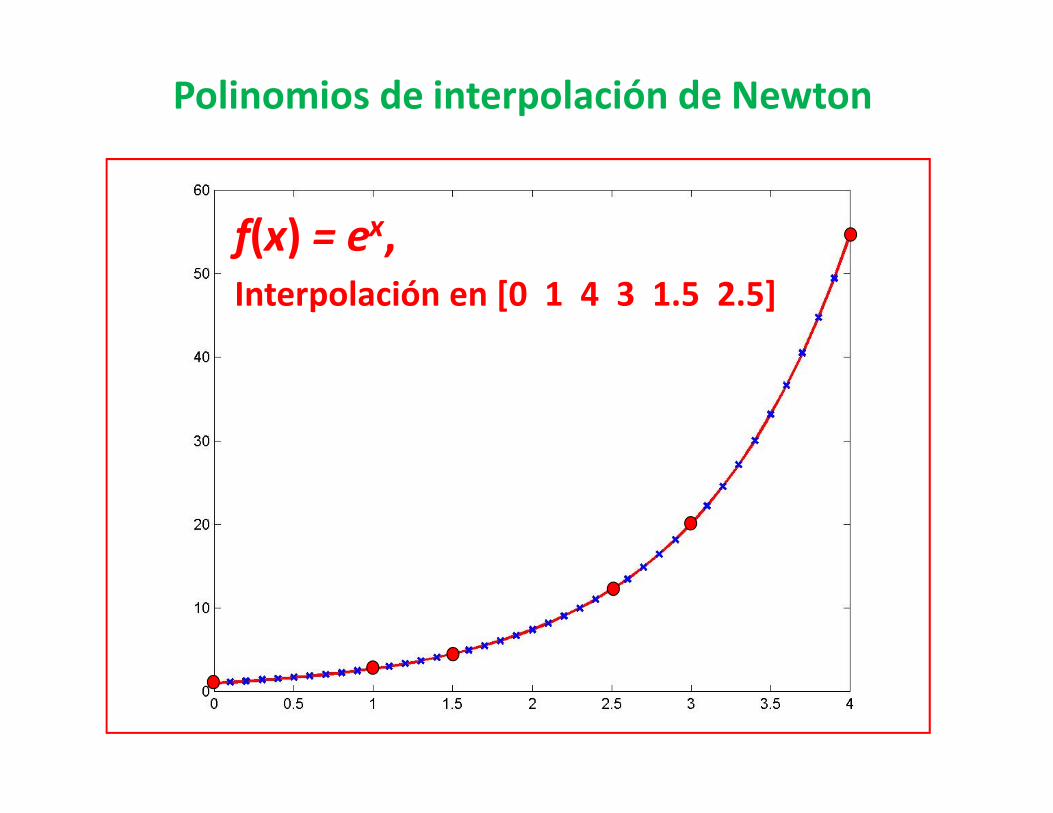
f(x) = ex, Interpolación en [0 1 4 3 1.5 2.5]
Polinomios de interpolación de Newton
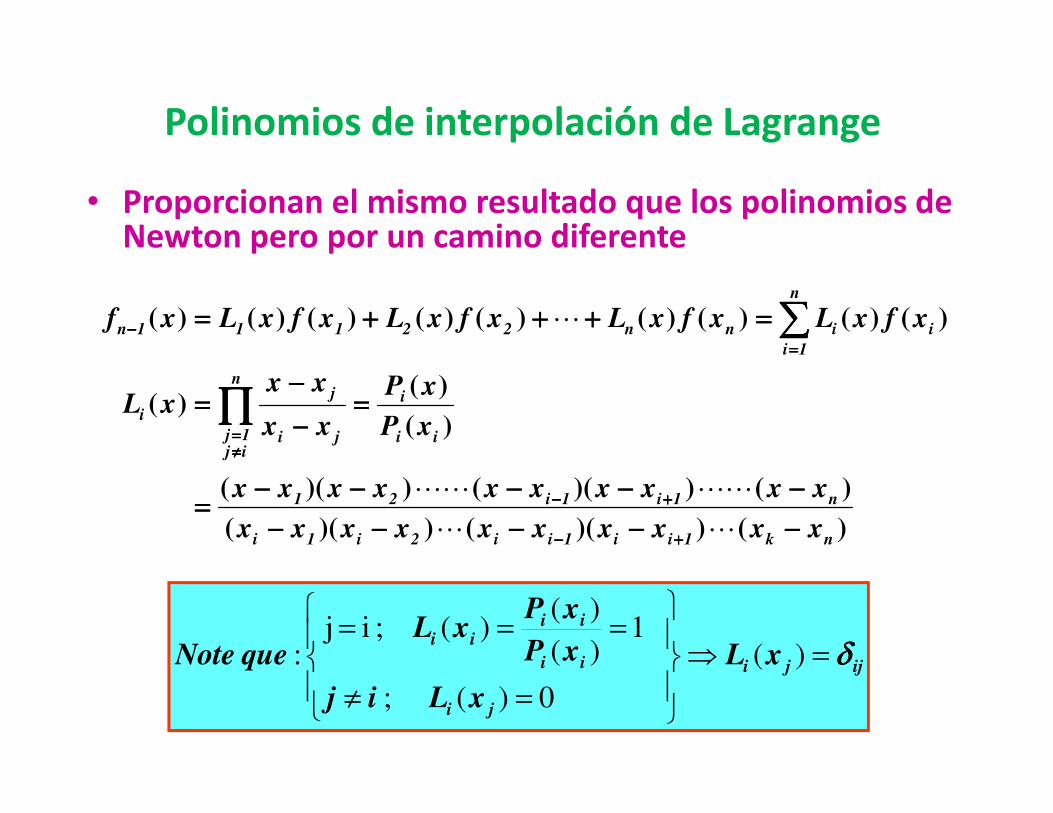
• Proporcionan el mismo resultado que los polinomios de Newton pero por un camino diferente
)()(
)()()()()()()()()(
in
j
i
i
n
1i
inn22111n
xPxxxL
xfxLxfxLxfxLxfxLxf
====−−−−
−−−−====
====++++++++++++========
−−−−
∏∏∏∏
∑∑∑∑L
Polinomios de interpolación de Lagrange
)())(())((
)())(())((
)()(
nk1ii1ii2i1i
n1i1i21
iiij1j ji
i
xxxxxxxxxx
xxxxxxxxxx
xPxxxL
−−−−−−−−−−−−−−−−−−−−
−−−−−−−−−−−−−−−−−−−−====
====−−−−
====
++++−−−−
++++−−−−
≠≠≠≠====
∏∏∏∏
LL
LLLL
ijji
ji
ii
iiii
xL
xLij
xP
xPxL
queNote δδδδ=⇒
=≠
===)(
0)( ;
1)(
)()( ; ij
:
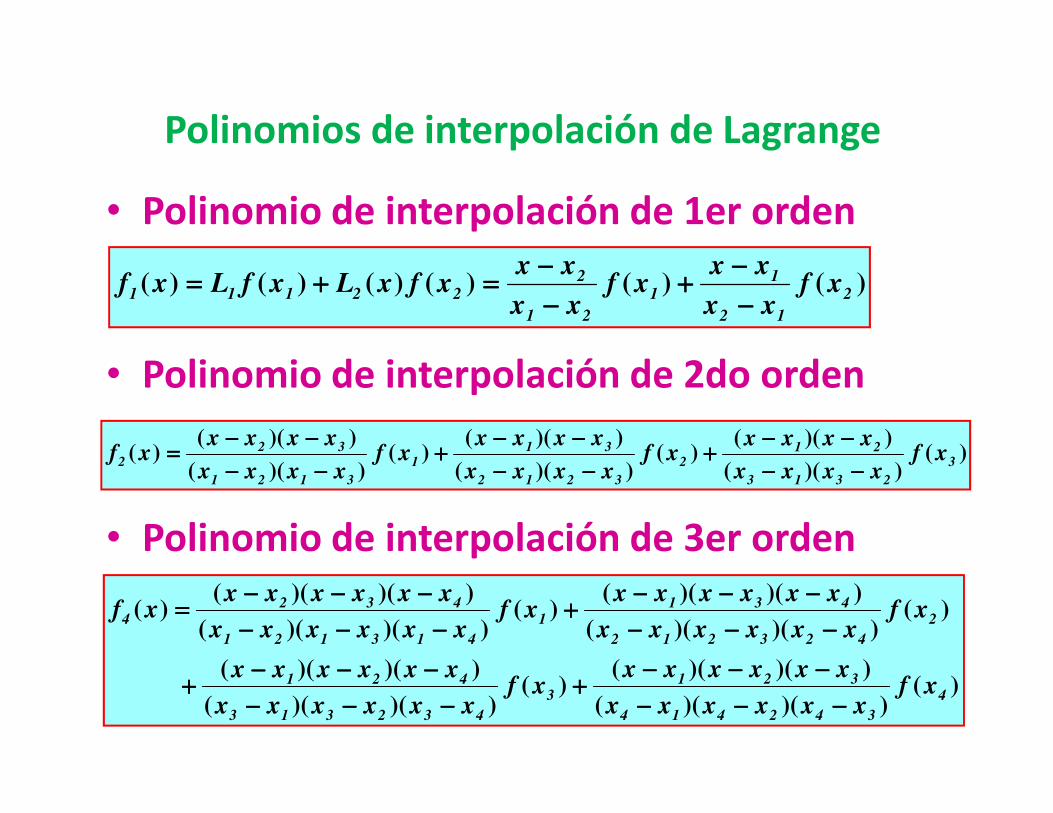
• Polinomio de interpolación de 1er orden
• Polinomio de interpolación de 2do orden
)()()()()()( 2
12
11
21
222111 xf
xx
xxxf
xx
xxxfxLxfLxf
−−−−
−−−−++++
−−−−
−−−−====++++====
Polinomios de interpolación de Lagrange
• Polinomio de interpolación de 3er orden
)())((
))(()(
))((
))(()(
))((
))(()( 3
2313
212
3212
311
3121
322 xf
xxxx
xxxxxf
xxxx
xxxxxf
xxxx
xxxxxf
−−−−−−−−
−−−−−−−−++++
−−−−−−−−
−−−−−−−−++++
−−−−−−−−
−−−−−−−−====
)())()((
))()(()(
))()((
))()((
)())()((
))()(()(
))()((
))()(()(
4
342414
3213
432313
421
2
423212
4311
413121
4324
xfxxxxxx
xxxxxxxf
xxxxxx
xxxxxx
xfxxxxxx
xxxxxxxf
xxxxxx
xxxxxxxf
−−−−−−−−−−−−
−−−−−−−−−−−−++++
−−−−−−−−−−−−
−−−−−−−−−−−−++++
−−−−−−−−−−−−
−−−−−−−−−−−−++++
−−−−−−−−−−−−
−−−−−−−−−−−−====
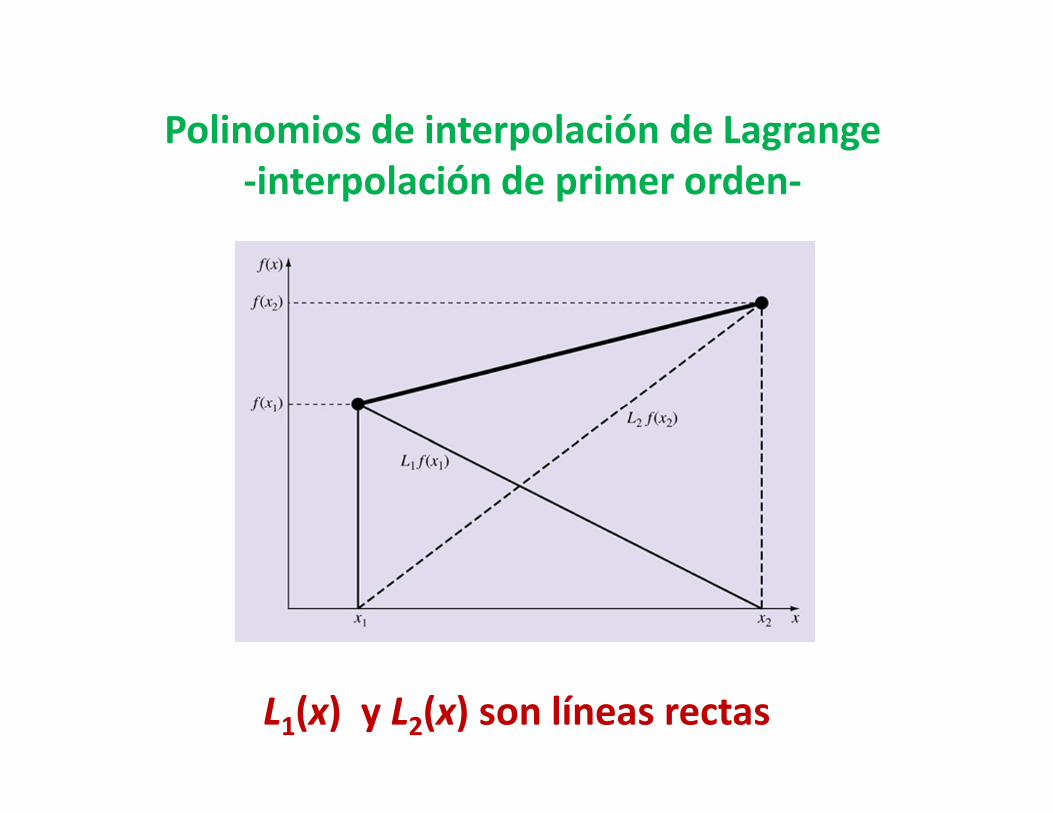
Polinomios de interpolación de Lagrange-interpolación de primer orden-
L1(x) y L2(x) son líneas rectas
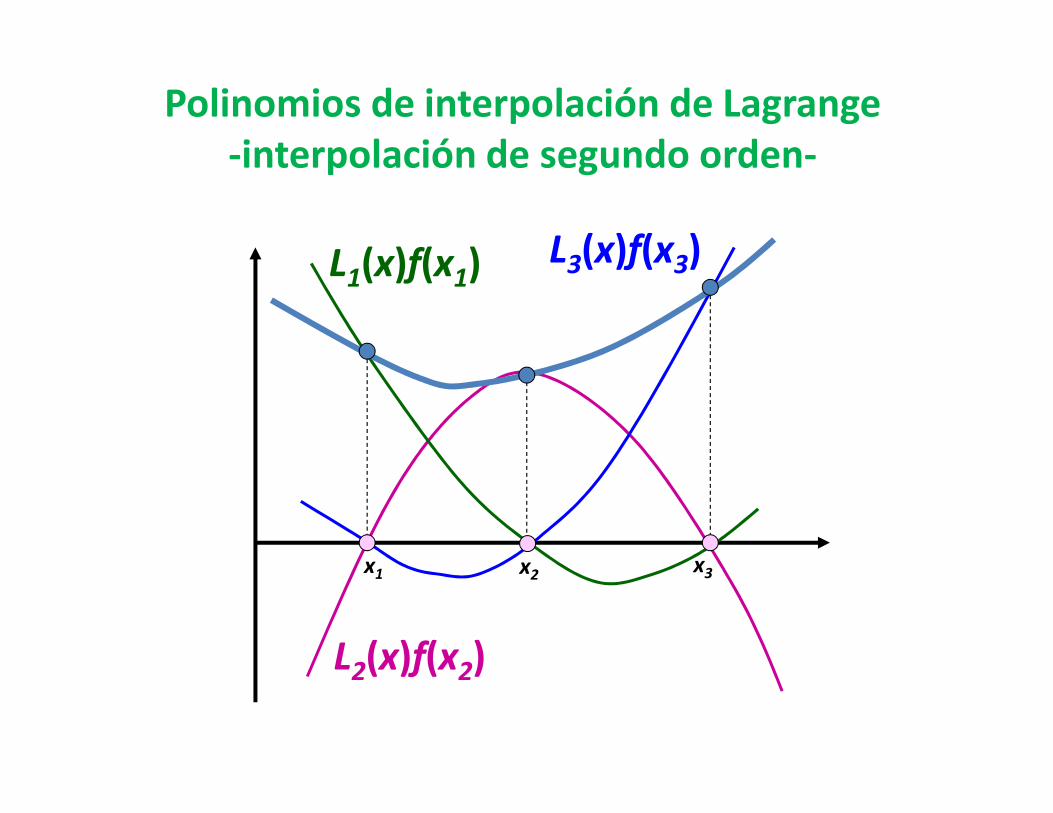
L3(x)f(x3)L1(x)f(x1)
Polinomios de interpolación de Lagrange-interpolación de segundo orden-
L2(x)f(x2)
x1 x2x3
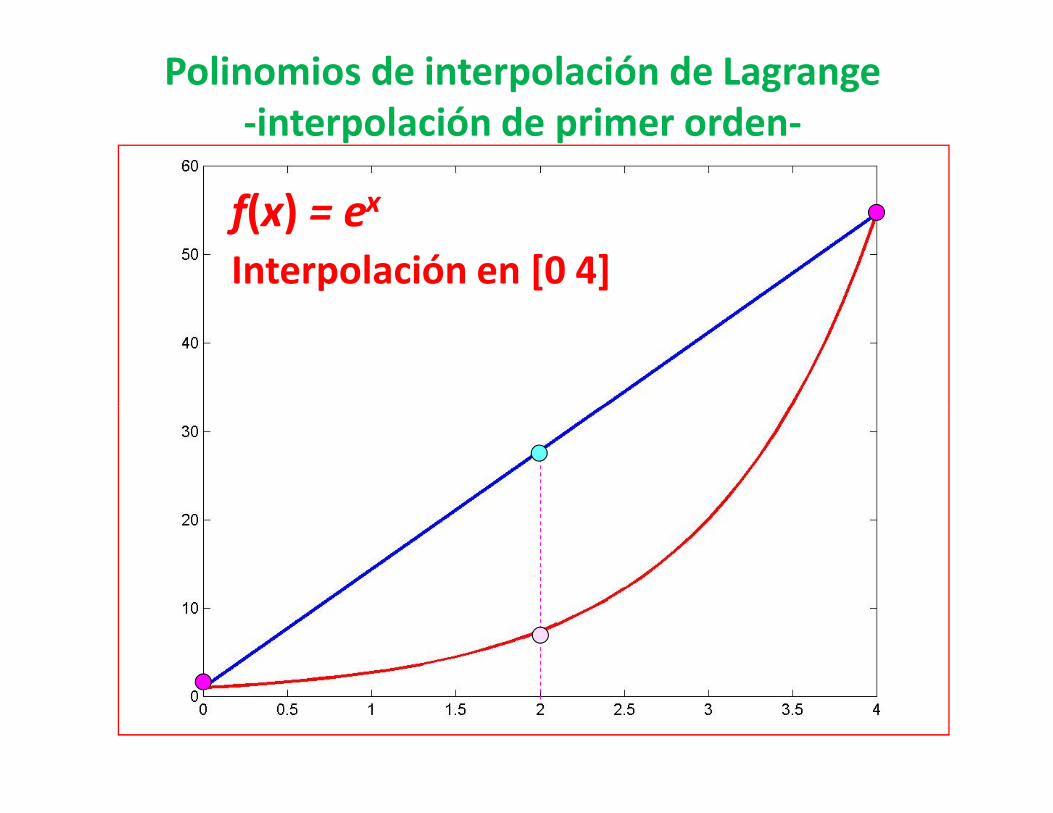
f(x) = ex
Interpolación en [0 4]
Polinomios de interpolación de Lagrange-interpolación de primer orden-
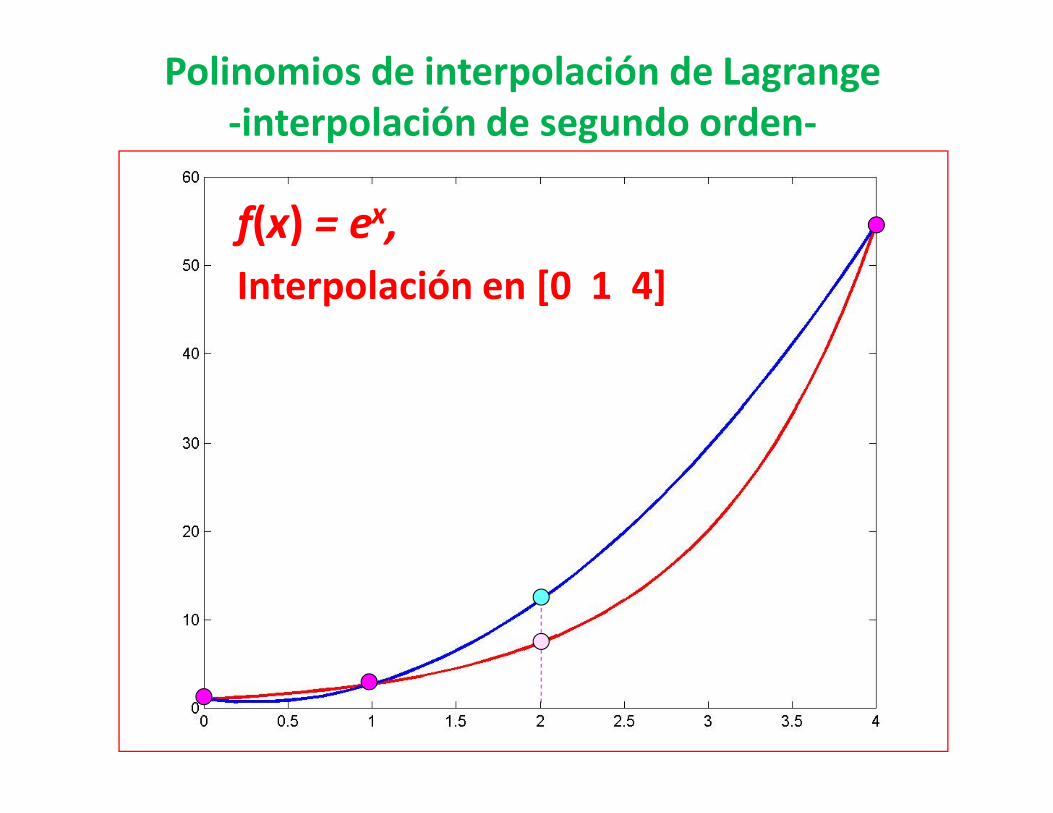
f(x) = ex,
Interpolación en [0 1 4]
Polinomios de interpolación de Lagrange-interpolación de segundo orden-
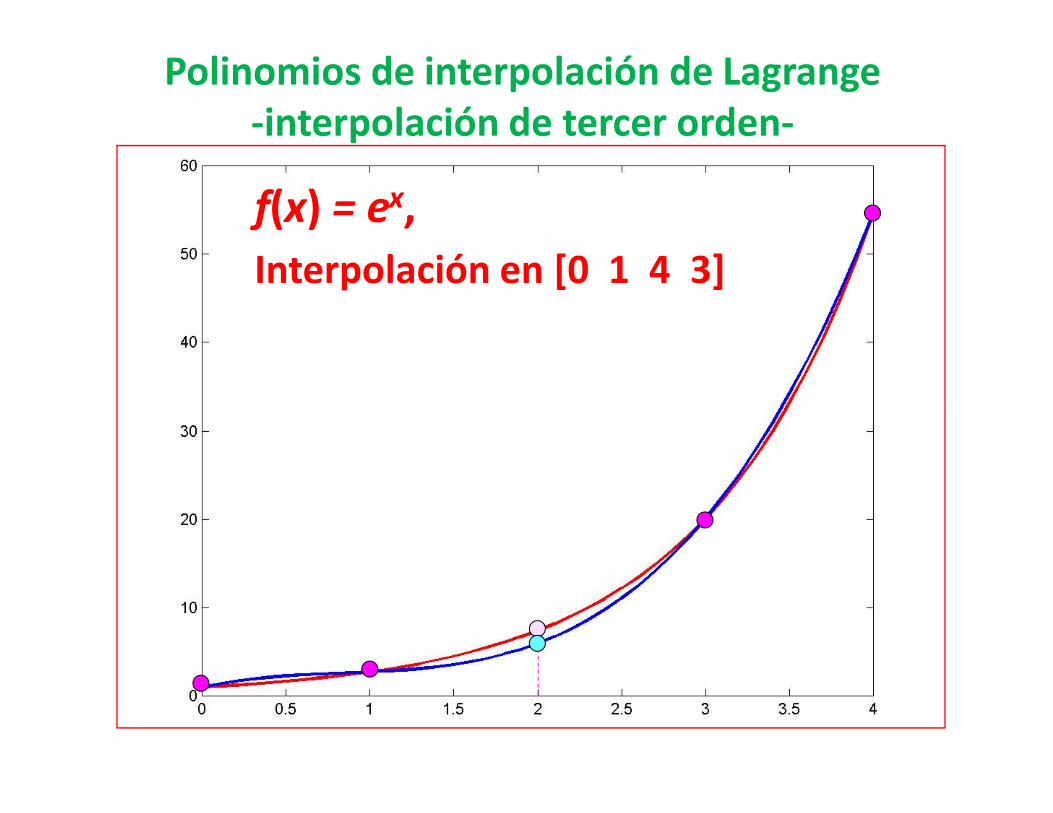
f(x) = ex,
Interpolación en [0 1 4 3]
Polinomios de interpolación de Lagrange-interpolación de tercer orden-
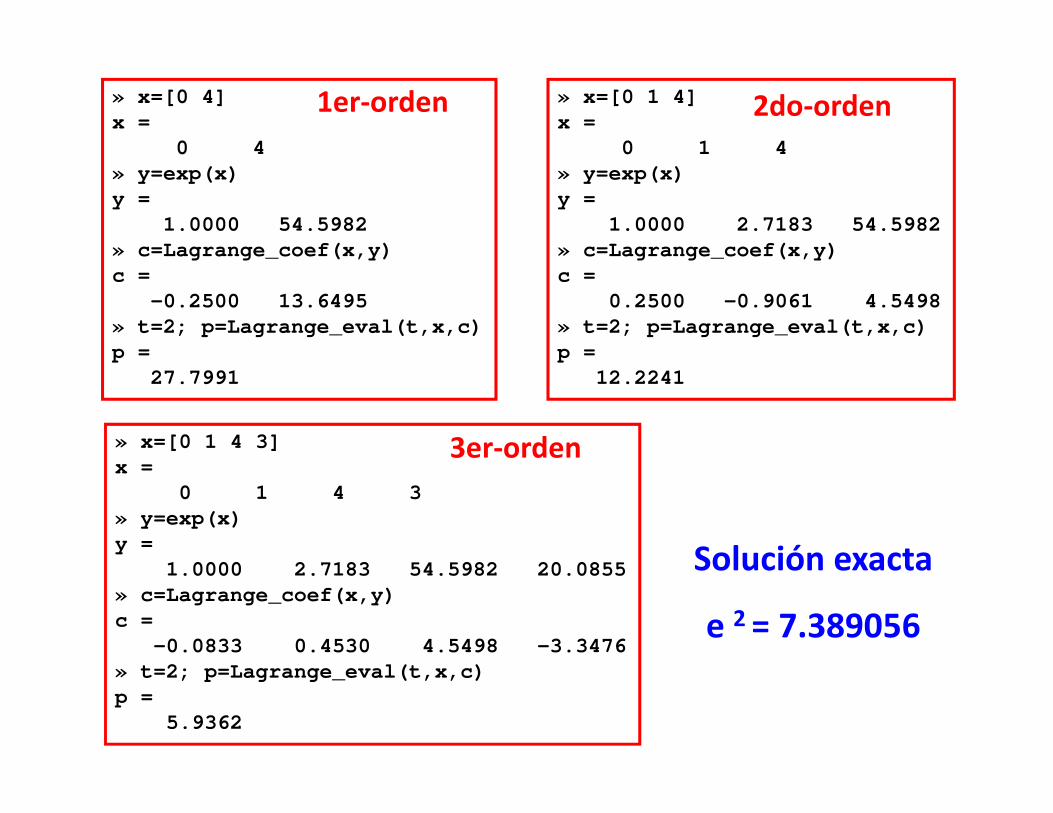
» x=[0 4]
x =
0 4
» y=exp(x)
y =
1.0000 54.5982
» c=Lagrange_coef(x,y)
c =
-0.2500 13.6495
» t=2; p=Lagrange_eval(t,x,c)
p =
27.7991
» x=[0 1 4]
x =
0 1 4
» y=exp(x)
y =
1.0000 2.7183 54.5982
» c=Lagrange_coef(x,y)
c =
0.2500 -0.9061 4.5498
» t=2; p=Lagrange_eval(t,x,c)
p =
12.2241
1er-orden 2do-orden
» x=[0 1 4 3]
x =
0 1 4 3
» y=exp(x)
y =
1.0000 2.7183 54.5982 20.0855
» c=Lagrange_coef(x,y)
c =
-0.0833 0.4530 4.5498 -3.3476
» t=2; p=Lagrange_eval(t,x,c)
p =
5.9362
3er-orden
Solución exacta
e 2 = 7.389056
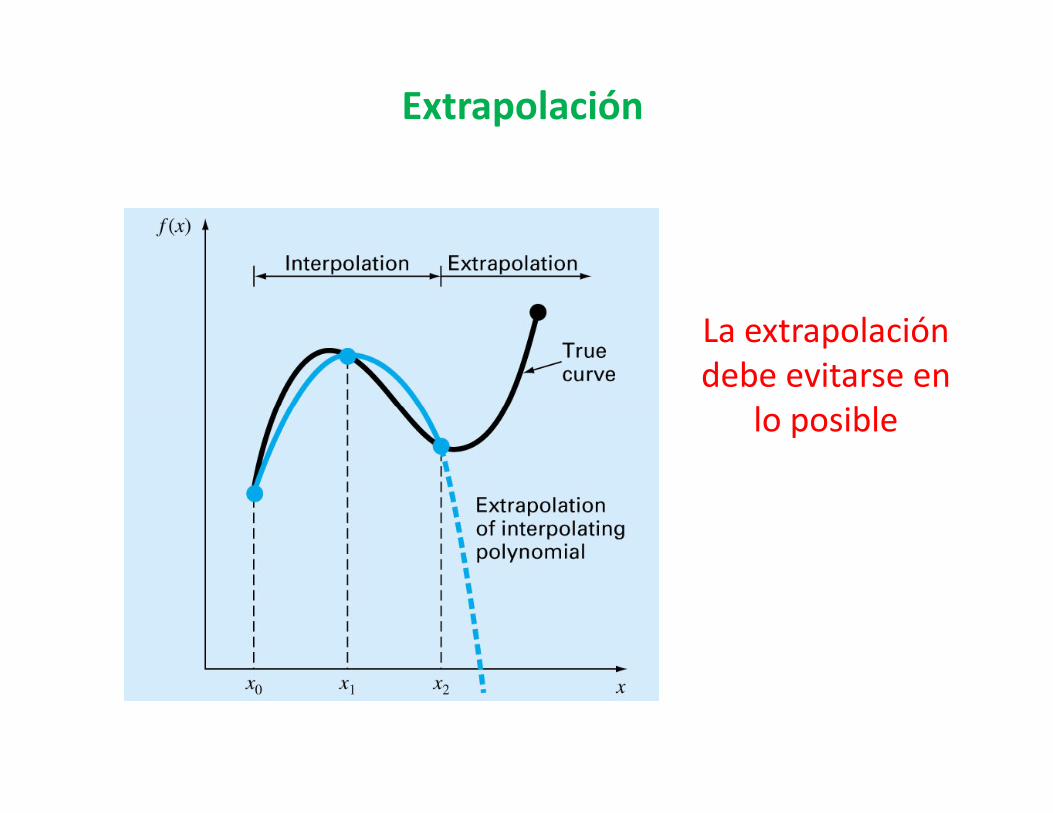
La extrapolación
debe evitarse en
lo posible
Extrapolación
lo posible
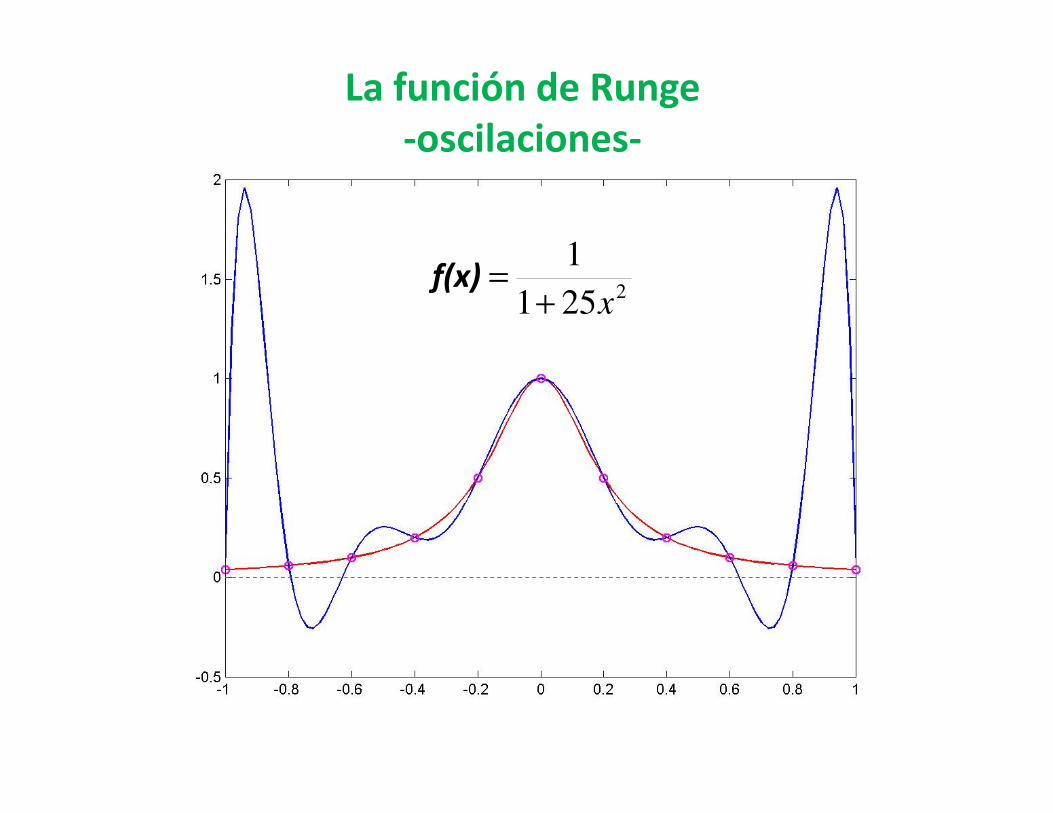
2x251
1)x(f
++++====
La función de Runge-oscilaciones-
2251
1
x+=f(x)
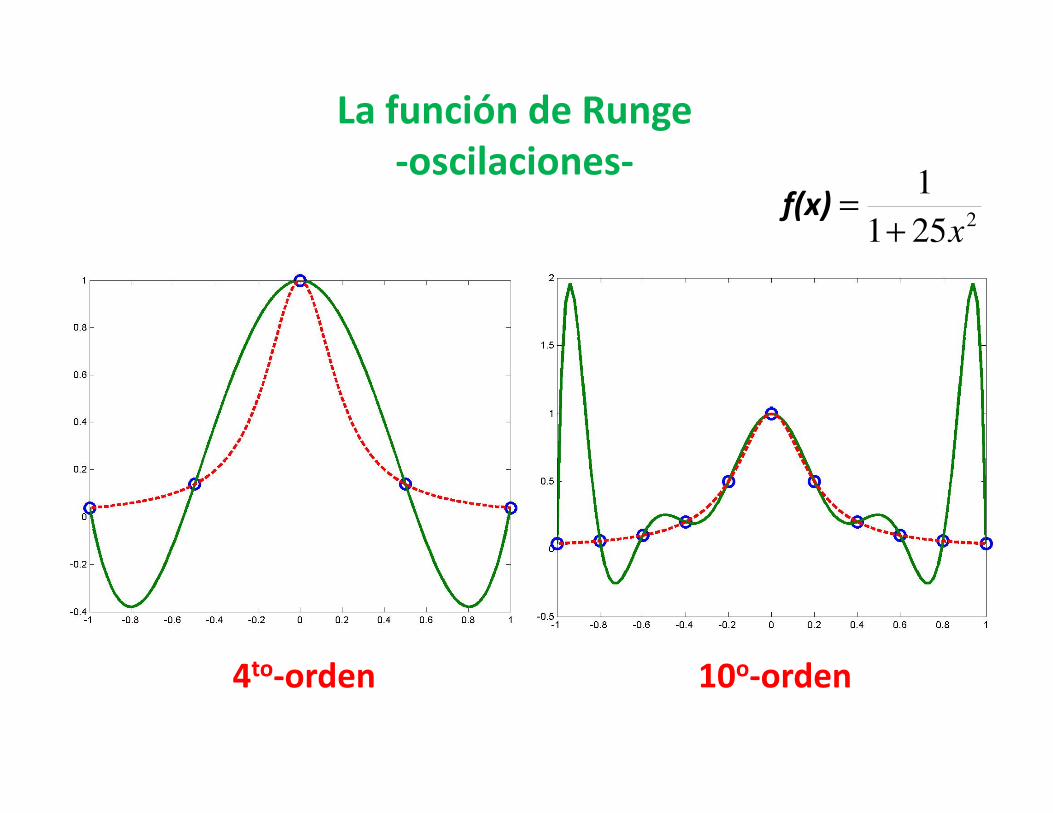
La función de Runge-oscilaciones-
2251
1
x+=f(x)
4to-orden 10o-orden
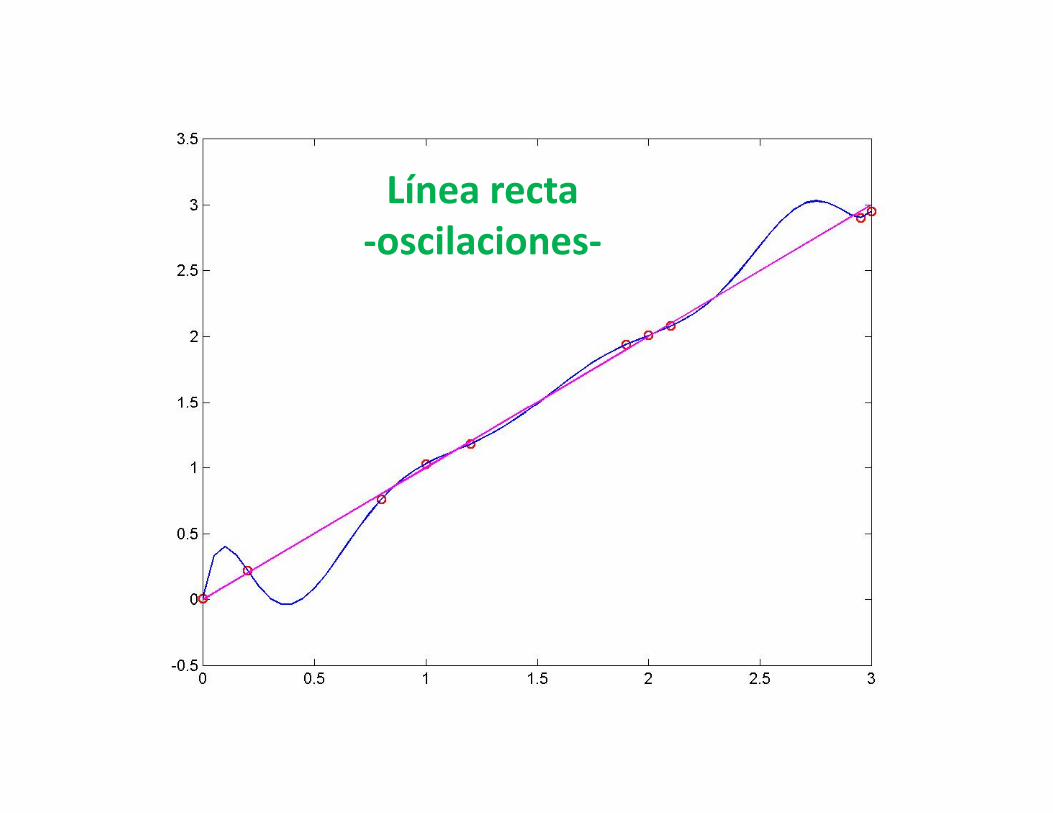
Línea recta-oscilaciones-
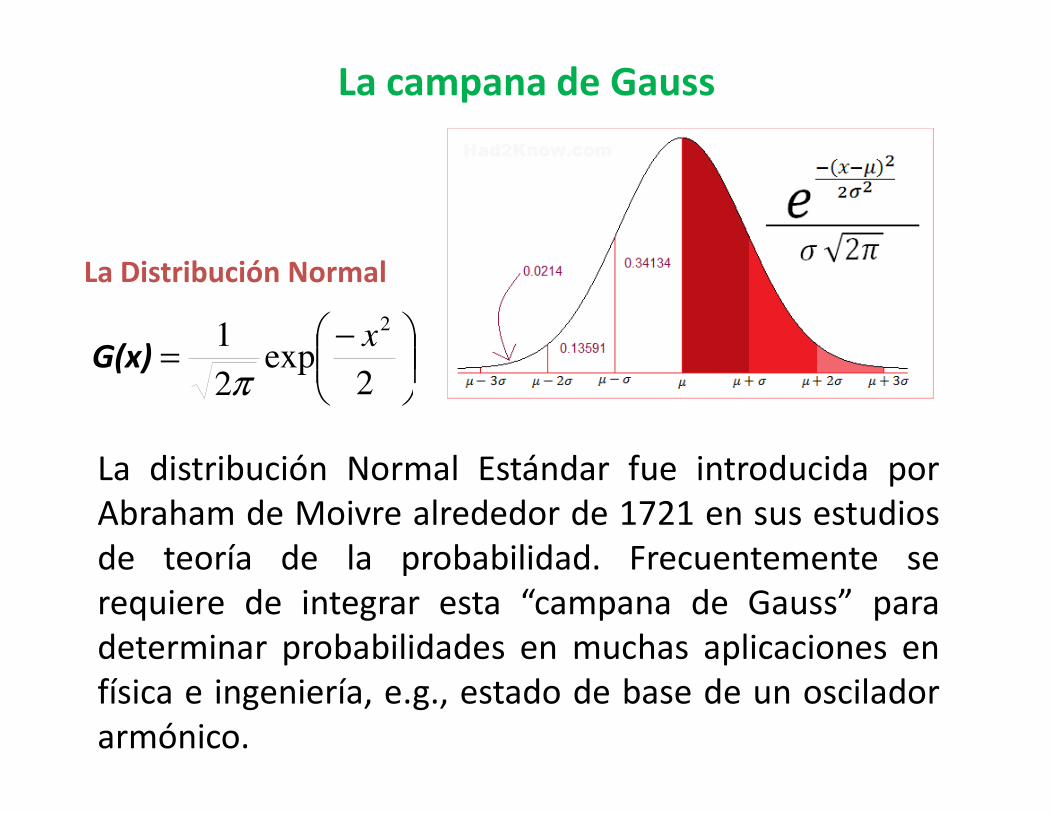
La Distribución Normal
−=
2exp
2
1 2x
πG(x)
La campana de Gauss
La distribución Normal Estándar fue introducida por
Abraham de Moivre alrededor de 1721 en sus estudios
de teoría de la probabilidad. Frecuentemente se
requiere de integrar esta “campana de Gauss” para
determinar probabilidades en muchas aplicaciones en
física e ingeniería, e.g., estado de base de un oscilador
armónico.
La Distribución Normal
Determinar la integral definida entre (–inf, inf) de la
distribución Normal no representa problemas, pero
resulta mas difícil determinar la integral en una de las
porciones del dominio. De hecho no existe una forma
cerrada para la integral definida en un intervalo.
Halle los coeficientes de un polinomio de
interpolación de orden 10 para determinar una
aproximación de la integral definida de la función
Normal G(x) en el intervalo de (–inf, xa] para xa = -0.1,
-0.5, -1.0, -2.0, -3.0. Compare estos resultados con la
aproximación de las integrales utilizando un ajuste
polinomial de orden 10 de la campana.
Fecha de entrega: Lunes 15 de Septiembre de 2014


















