InSAR Deformation Time Series Using an $L_{1}$-Norm Small-Baseline Approach
11
536 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 49, NO. 1, JANUARY 2011 InSAR Deformation Time Series Using an L 1 -Norm Small-Baseline Approach Tom R. Lauknes, Student Member, IEEE, Howard A. Zebker, Fellow, IEEE, and Yngvar Larsen, Member, IEEE Abstract—Satellite synthetic aperture radar interferometry (InSAR) is an invaluable tool for land displacement monitor- ing. Improved access to time series of satellite data has led to the development of several innovative multitemporal algorithms. Small baseline (SB) is one such time-series InSAR method, based on combining and inverting a set of unwrapped interferograms for surface displacement. Two-dimensional unwrapping of sparse data sets is a challenging task, and unwrapping errors can lead to incorrectly estimated deformation time series. It is well known that L 1 -norm is more robust than L 2 -norm cost function min- imization if the data set has a large number of outlying points. In this paper, we present an L 1 -norm-based SB method using an iteratively reweighted least squares algorithm. We show that the displacement phase of both synthetic data, as well as a real data set that covers the San Francisco Bay area, is recovered more accurately than with L 2 -norm solutions. Index Terms—Deformation time series, phase unwrapping, ro- bust regression, SAR interferometry (InSAR), small baseline (SB), synthetic aperture radar (SAR). I. I NTRODUCTION D IFFERENTIAL synthetic aperture radar (SAR) interfer- ometry (InSAR) is an invaluable tool for regional land de- formation monitoring [1]. General availability of SAR data for research use has led to the development of several algorithms for time-series analysis. Recently developed InSAR processing approaches that use data from multiple acquisitions to retrieve deformation time series include persistent scatterer interferom- etry [2]–[4] and small-baseline (SB) methods [5]–[9]. The SB technique is an approach where, starting from a large number of coregistered SAR scenes, multiple-master interfero- grams are computed and analyzed to produce a mean velocity map and displacement time series of multilooked coherent pixels. In order to be able to detect small displacement rates, many SAR scenes are required. Consequently, we often need to include interferograms formed using large temporal or spatial Manuscript received July 14, 2009; revised November 2, 2009 and March 8, 2010; accepted May 21, 2010. Date of publication July 19, 2010; date of current version December 27, 2010. This work was supported in part by the Geological Survey of Norway (NGU), by the Research Council of Norway through the International Centre for Geohazards, by the Research Council of Norway, by the Norwegian Space Centre, and by the University of Tromsø. T. R. Lauknes and Y. Larsen are with the Northern Research Institute Tromsø (Norut), 9294 Tromsø, Norway (e-mail: [email protected]; [email protected]). H. A. Zebker is with the Department of Electrical Engineering and the Department of Geophysics, Stanford University, Stanford, CA 94305-9505 USA (e-mail: [email protected]). Digital Object Identifier 10.1109/TGRS.2010.2051951 baselines in our data stack. Often, large areas will decorrelate, due mainly to large spatial baselines and temporal effects that result from changes in scattering properties within the resolu- tion cell between the two dates used to form the interferogram [10], [11]. These decorrelation effects often contaminate large areas in the interferograms with phase noise, making phase unwrapping, i.e., the retrieval of absolute phase from measure- ments that are ambiguous by integer multiples of 2π [12], a very challenging task [10]. Pepe and Lanari [13] presented an extension of the min- imum cost flow algorithm by Costantini [14] and Costantini and Rosen [15] for unwrapping of multitemporal differential SAR interferograms. Their algorithm is based on minimizing two network-flow problems, formulated using both spatial and temporal information. The proposed algorithm is interesting; however, the algorithm involves assuming a temporal displace- ment model. In the signal reconstruction step, the SB algorithm requires unwrapped interferogram phase values for all selected coherent points. After the unwrapping step, all pixels can be referenced to a chosen point with a priori known displacement. A typical interferogram is often divided into several discon- nected coherent areas, separated by large decorrelated areas, for example, areas with significant vegetation cover or water, e.g., [16]. The low-coherence areas introduce ambiguities for traditional 2-D phase unwrapping methods that use regular grid spacing. Many unwrapping algorithms unwrap consistently within each coherent patch; however, relative values between the different coherent patches may have unknown integer mul- tiples of 2π phase jumps (see Fig. 1). If one of these jumps is not known accurately, the unwrapped phase field can have large discontinuities, and so, we wish to use a processing algorithm that can correct these jumps accurately and robustly. Disconnected patches that are not linked correctly form a set of “outliers” in the set of data to be unwrapped. For each SB coherent pixel, the measured time vector of all unwrapped interferograms will include spikelike noise from each patch that is initially unwrapped with the wrong ambiguity value. The SB subset algorithm (SBAS) is one specific SB implementa- tion presented by Berardino et al. [5]. They solve the linear system by minimizing an L 2 -norm [least squares (LS)]-based cost function. However, inverse methods based on L 2 -norm cost function minimization often produce poor solutions in the presence of spikelike measurement noise, e.g., [17]. In this paper, we propose an extension to SB methods that leads to better robustness with respect to phase unwrapping errors in the interferometric data stack. Our method is based on the SBAS algorithm but significantly improves the robustness in 0196-2892/$26.00 © 2010 IEEE
Transcript of InSAR Deformation Time Series Using an $L_{1}$-Norm Small-Baseline Approach

536 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 49, NO. 1, JANUARY 2011
InSAR Deformation Time Series Using anL1-Norm Small-Baseline Approach
Tom R. Lauknes, Student Member, IEEE, Howard A. Zebker, Fellow, IEEE, and Yngvar Larsen, Member, IEEE
Abstract—Satellite synthetic aperture radar interferometry(InSAR) is an invaluable tool for land displacement monitor-ing. Improved access to time series of satellite data has led tothe development of several innovative multitemporal algorithms.Small baseline (SB) is one such time-series InSAR method, basedon combining and inverting a set of unwrapped interferogramsfor surface displacement. Two-dimensional unwrapping of sparsedata sets is a challenging task, and unwrapping errors can leadto incorrectly estimated deformation time series. It is well knownthat L1-norm is more robust than L2-norm cost function min-imization if the data set has a large number of outlying points.In this paper, we present an L1-norm-based SB method usingan iteratively reweighted least squares algorithm. We show thatthe displacement phase of both synthetic data, as well as a realdata set that covers the San Francisco Bay area, is recovered moreaccurately than with L2-norm solutions.
Index Terms—Deformation time series, phase unwrapping, ro-bust regression, SAR interferometry (InSAR), small baseline (SB),synthetic aperture radar (SAR).
I. INTRODUCTION
D IFFERENTIAL synthetic aperture radar (SAR) interfer-ometry (InSAR) is an invaluable tool for regional land de-
formation monitoring [1]. General availability of SAR data forresearch use has led to the development of several algorithmsfor time-series analysis. Recently developed InSAR processingapproaches that use data from multiple acquisitions to retrievedeformation time series include persistent scatterer interferom-etry [2]–[4] and small-baseline (SB) methods [5]–[9].
The SB technique is an approach where, starting from a largenumber of coregistered SAR scenes, multiple-master interfero-grams are computed and analyzed to produce a mean velocitymap and displacement time series of multilooked coherentpixels.
In order to be able to detect small displacement rates, manySAR scenes are required. Consequently, we often need toinclude interferograms formed using large temporal or spatial
Manuscript received July 14, 2009; revised November 2, 2009 and March 8,2010; accepted May 21, 2010. Date of publication July 19, 2010; date of currentversion December 27, 2010. This work was supported in part by the GeologicalSurvey of Norway (NGU), by the Research Council of Norway through theInternational Centre for Geohazards, by the Research Council of Norway, bythe Norwegian Space Centre, and by the University of Tromsø.
T. R. Lauknes and Y. Larsen are with the Northern Research InstituteTromsø (Norut), 9294 Tromsø, Norway (e-mail: [email protected];[email protected]).
H. A. Zebker is with the Department of Electrical Engineering and theDepartment of Geophysics, Stanford University, Stanford, CA 94305-9505USA (e-mail: [email protected]).
Digital Object Identifier 10.1109/TGRS.2010.2051951
baselines in our data stack. Often, large areas will decorrelate,due mainly to large spatial baselines and temporal effects thatresult from changes in scattering properties within the resolu-tion cell between the two dates used to form the interferogram[10], [11]. These decorrelation effects often contaminate largeareas in the interferograms with phase noise, making phaseunwrapping, i.e., the retrieval of absolute phase from measure-ments that are ambiguous by integer multiples of 2π [12], a verychallenging task [10].
Pepe and Lanari [13] presented an extension of the min-imum cost flow algorithm by Costantini [14] and Costantiniand Rosen [15] for unwrapping of multitemporal differentialSAR interferograms. Their algorithm is based on minimizingtwo network-flow problems, formulated using both spatial andtemporal information. The proposed algorithm is interesting;however, the algorithm involves assuming a temporal displace-ment model.
In the signal reconstruction step, the SB algorithm requiresunwrapped interferogram phase values for all selected coherentpoints. After the unwrapping step, all pixels can be referencedto a chosen point with a priori known displacement.
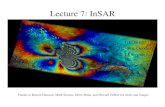
A typical interferogram is often divided into several discon-nected coherent areas, separated by large decorrelated areas,for example, areas with significant vegetation cover or water,e.g., [16]. The low-coherence areas introduce ambiguities fortraditional 2-D phase unwrapping methods that use regular gridspacing. Many unwrapping algorithms unwrap consistentlywithin each coherent patch; however, relative values betweenthe different coherent patches may have unknown integer mul-tiples of 2π phase jumps (see Fig. 1). If one of these jumps isnot known accurately, the unwrapped phase field can have largediscontinuities, and so, we wish to use a processing algorithmthat can correct these jumps accurately and robustly.
Disconnected patches that are not linked correctly form aset of “outliers” in the set of data to be unwrapped. For eachSB coherent pixel, the measured time vector of all unwrappedinterferograms will include spikelike noise from each patch thatis initially unwrapped with the wrong ambiguity value. TheSB subset algorithm (SBAS) is one specific SB implementa-tion presented by Berardino et al. [5]. They solve the linearsystem by minimizing an L2-norm [least squares (LS)]-basedcost function. However, inverse methods based on L2-normcost function minimization often produce poor solutions in thepresence of spikelike measurement noise, e.g., [17].
In this paper, we propose an extension to SB methods thatleads to better robustness with respect to phase unwrappingerrors in the interferometric data stack. Our method is based onthe SBAS algorithm but significantly improves the robustness in
0196-2892/$26.00 © 2010 IEEE

LAUKNES et al.: INSAR DEFORMATION TIME SERIES 537
Fig. 1. Illustration of an unwrapped interferogram. The decorrelated areas inbetween the coherent blocks have very few coherent points. The two areasmarked with 0s are correctly unwrapped, while the lower right and upperleft areas have a constant phase shift of −2π and +2π, respectively. Mostunwrapping algorithms are able to correctly unwrap within each block, butadjoint patches can often have integer multiples of 2π phase cycle differences.
the phase inversion step by replacing the L2-norm cost functionwith an L1-norm-based cost function. While efficient and directmethods exist for computing the L2-norm through solvingthe normal equations, most approaches for minimizing theL1-norm are based on linear programming, e.g., [17]–[19]. Wehave implemented the L1-norm inversion using the iterativelyreweighted LS (IRLS) algorithm [18], a method known fromthe field of inverse problems. Using both simulated and actualdata, we show that our L1-norm approach improves robustnesswith respect to temporal decorrelation noise and unwrappingerrors. We apply our method on the same San Francisco Bayarea data set as presented by Lanari et al. [20]. By using thesame temporal coherence threshold value as [20], we are able toinclude more points in our final results, leading to an increasedspatial coverage. This can be important for deformation studiesin rural areas where the interferograms are sparsely coherent.
For brevity and to establish the notation, we begin inSection II by briefly reviewing the SBAS technique. Then, inSection III, we discuss the signal reconstruction algorithm usedand present our optimization method based on an L1-norm costfunction. In Section V, we present the simulation results andconclude by applying the L1 method to a real InSAR dataset, where we compare the performance against the L2-normminimization.
II. SBAS MULTITEMPORAL InSAR ALGORITHM
In this section, we review the fundamental concepts behindthe SBAS multitemporal InSAR algorithm. For further details,we refer the readers to [5], [7], and [8].
Let us start by assuming a set of N + 1 coregisteredsingle-look complex SAR images. The first step of the SBASalgorithm is the generation of M multilooked SB differential in-terferograms. By restricting the maximum spatial baseline used,spatial decorrelation [10] is reduced, and the effect of residualphase due to uncompensated topography is mitigated. On theother hand, such a baseline constraint can lead to a separationof the interferograms into several independent subsets in the
baseline–time domain. The SBAS algorithm correctly retrievesthe phase values as long as the subsets are overlapping in time.
We select a common set of coherent pixels in M interfer-ograms as characterized by high coherence in every interfero-gram. Depending on the particular data set, this operation mayseparate the area into several disconnected coherent patches.
The SBAS algorithm relies on the availability of unwrappedphase values for all M interferograms. Consequently, a phaseunwrapping step is needed to retrieve the absolute phase valuesfrom the (modulo 2π) wrapped interferometric phase, e.g., [12],[15], [21], and [22].
After phase unwrapping, all pixels are referenced to aselected point, usually characterized by high coherence anda priori known deformation. The differential phase for a genericcoherent pixel in interferogram j, generated by combining SARacquisitions at times tB and tA, is [5]
δφj = φ(tB) − φ(tA)
≈ 4π
λ[d(tB) − d(tA)] +
4π
λ
B⊥j
r sin θΔz
+4π
λ[datm(tB)−datm(tA)]+nj ∀j =1, . . . ,M (1)
where λ is the transmitted radar wavelength, φ(tB) and φ(tA)are the phases corresponding to the times tB and tA, respec-tively, and d(tB) and d(tA) are the radar line-of-sight (LOS)projections of the cumulative deformation referenced to thefirst scene (i.e., implying φ(t0) = 0). We also include a phaseterm that is related to possible errors Δz in the applied digitalelevation model (DEM) used for differential interferogramgeneration. This phase component is proportional to the per-pendicular baseline for each interferogram B⊥j , range distancer, and satellite look angle θ. A possible atmospheric signal[3], [23], [24] is included in the terms datm(tB) and datm(tA).Decorrelation effects and other noise sources are included inthe last term nj . Note that the following processing steps arecarried out on a pixel-by-pixel basis on all selected coherentpixels.
A. Estimation of DEM Error and Low-PassDisplacement Signal
We first estimate the DEM error and displacement modelparameters. We use a cubic displacement model
φ(ti) = v · (ti − t0) +12a · (ti − t0)2 +
16Δa · (ti − t0)3
(2)
and write the unknown parameter vector as
xT = [v, a,Δa,Δz] (3)
where v is the mean velocity, a is the mean acceleration, Δa isthe mean acceleration variation, and Δz is the DEM error.
As in [5], using a cubic model, we form a linear system withM equations (corresponding to the vector of unwrapped phasevalues δφ) and four unknowns
[AM, c]x = δφ (4)

538 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 49, NO. 1, JANUARY 2011
where M is an (N × 4) matrix corresponding to the pa-rameters of the cubic displacement model in (2), cT =[(4π/λ)/(B⊥1/r1 sin θ1), . . . , (4π/λ)/(B⊥M/rM sin θM )] isproportional to the DEM error, and A is an (M × N) designmatrix corresponding to the unknown cumulative phase valuesφT = [φ1, φ2, . . . , φN ].
We would like to point out that the cubic displacement modelin (2) is used only to help the estimation of the DEM error,while the final inversion to compute the displacement timeseries is independent of such a model [see (5)].
B. Estimation of Cumulative Phase
The estimated DEM error is subtracted from the unwrappedphase, forming the following linear system:
Bv = δφ′ (5)
where δφ′ = δφ − Δz · c is the phase with the DEM errorcontribution subtracted, and the unknown coefficient vector is
vT =[v1 =
φ(t1)t1 − t0
, . . . , vN =φ(tN ) − φ(tN−1)
tN − tN−1
]. (6)
As in [5], we replace the unknown cumulative phase valuesφT = [φ1, φ2, . . . , φN ] with the mean phase velocity betweentime adjacent acquisitions. The design matrix B is changedaccordingly and now represents the cumulative time betweeneach interferogram pair. A trivial integration step is needed torecover the final solution φ.
III. SIGNAL RECONSTRUCTION ALGORITHM
The linear system to be solved is (4) or (5). Let us considerthe algorithm to reconstruct the coefficient vector v ∈ RN from(5), where we have M measurements of the phase vector δφ′.1
We may thus write the linear system in (4) as
Bv = δφ′ + n (7)
where n is the residual vector to be minimized.Many inverse problems can be formulated using standard
linear system theory, e.g., [19] and [25]. We wish the signalreconstruction algorithm to be robust, i.e., a small perturbationin the data should lead to a small perturbation in the recon-struction [25]. When solving inverse systems, a common wayof reconstructing the unknown signal vector is to minimizea cost function defined from the residual vector. A genericLp-norm of the residual vector n can be written as [26]
‖n‖p ≡(
M−1∑i=0
|ni|p)1/p
, p ≥ 1. (8)
The two most common norms are the method of LS, whichrefers to the L2-norm, and the method of least absolute devia-tions, which refers to the L1-norm minimization.
1The solution of (4) would be the same.
Fig. 2. Baseline–time plot using 39 scenes from ERS-1/2 (track 70, frame2853). A total of 196 SB interferometric pairs were computed based ona maximum spatial baseline threshold of 350 m and a maximum temporalbaseline of 1500 days. Each line corresponds to one interferogram.
In the SBAS algorithm, the rank of the matrix B is dependenton the number of time-overlapping subsets. By subsets, wemean the number of nonconnected groups of interferograms inthe baseline–time plane. The subsets must be overlapping intime, however. In practice, for most data sets, all interferogramsare connected, leading to one big connected set of all interfero-grams (see Fig. 2 for an example). When the data set is dividedinto several overlapping subsets, the rank of the B matrix isreduced by a factor corresponding to the number of subsetsplus one [5]. With a rank-deficient B, the system is ill-posed,and we have infinite solutions to the system (5), i.e., there areinfinitely many v’s that satisfy Bv = δφ′ [26]. Berardino et al.[5] introduced the minimum norm (L2) solution by applyingsingular-value decomposition (SVD) [26]. Thus, by using theminimum norm SVD solution, we are able to link separatesubsets, even when the subsets are nonconnected.
A. Minimum L2-Norm Solution
The classical and most widely used approach to inverseproblems of the type in (4) and (5) is to minimize the L2-normof the residual vector.
LS minimizes the L2-norm (sum of squared errors) betweenthe measurements and the model
v̂ = arg minv
‖n‖2 = arg minv
‖δφ′ − Bv‖2
= arg minv
(M−1∑i=0
|δφ′ − Bv|2i) 1
2
(9)
and its solution is found using the normal equations [26]
(BT B)v̂ = BT δφ′. (10)
The LS approach is an optimal method for independent andidentically distributed errors with zero mean. However, whenthe data are distributed otherwise, the LS method may yieldsevere deviations from the model [17]. In particular, the LSmethod is susceptible to outliers in the data.
In our SBAS linear equation system, large outliers can arisefrom unwrapping errors in each interferogram, and we thus

LAUKNES et al.: INSAR DEFORMATION TIME SERIES 539
require an alternative cost function that is more tolerant of theseerrors.
B. Minimum L1-Norm Reconstruction
The L1-norm for minimizing (5) is
v̂ = arg minv
‖n‖1 = arg minv
‖δφ′ − Bv‖1
= arg minv
M−1∑i=0
|δφ′ − Bv|i. (11)
The difference between the L1-norm and L2-norm is that theL1-norm minimizes the sum of magnitudes, while the L2-normminimizes the sum of squared magnitudes. Consequently, theL1-norm does not square each term of the misfit, resulting in asolution that is more robust with respect to outliers [25].
IV. L1-NORM VECTOR MINIMIZATION USING IRLS
Evolution of the field of robust regression led to the de-velopment of linear programming techniques for solving Lp
problems. However, linear programming methods are computa-tionally inefficient. Schlossmacher [18] published a method forsolving L1-norm optimization problems based on an iterativesolution of a weighted ordinary LS problem. The core principlebehind the iteratively reweighted least squares (IRLS) methodis an underlying weighted LS method inside an iteration loop,where the weights are adjusted correspondingly to the currentresiduals at each iteration, e.g., [18], [19], [27], and [28]. Thepurpose of adjusting the weighting matrix at each iteration is tode-emphasize points with large residuals. The IRLS algorithmterminates when the residuals are unchanged between succes-sive iterations.
Assuming a full-rank B matrix, the IRLS method followsfrom iterating(
BTW(k)BT)v(k + 1) = BTW(k)δφ′ (12)
where W(k) is a diagonal weighting matrix at the (k)th itera-tion whose iith entry for an L1-norm
W(k) = diag{|ni|−1
}M−1
i=0(13)
is computed from the residual vector n(k) = δφ′ − Bv(k).Byrd and Payne [29] showed that the IRLS algorithm is globallyconvergent for norms (1 ≤ p ≤ 2) under fairly weak condi-tions. Wii(k) must have the following: 1) nonincreasing in |ni|and 2) bounded for all |ni|. The elements of the weightingmatrix satisfy condition 1), while condition 2) can be satisfiedby modifying the weights to be bounded for zero residuals[25], [30]
Wii ={
1/|ni|, if |ni| > ε1/ε, if |ni| ≤ ε
(14)
where ε is a small positive factor chosen to avoid divisionby zero.
In addition, Gersztenkorn et al. [31] found that the perfor-mance is improved by normalizing the residuals to lie between
ε/rmax and 1. In the first step, the weights are chosen as unity,i.e., the LS solution is computed as the initial approximation.
The matrix B is rank deficient, and the system in (12) isill-posed if B has one or several small singular values [26].Consequently, the rank of B is equal to the number of nonzerosingular values. We have solved this problem by computingthe pseudoinverse of (BTB) at each iteration using the SVDmethod. Other iterative methods such as conjugate gradient androw action methods could also be applied [19], [26].
V. RESULTS
In this section, we compare the performance of the L1- andL2-norm cost function minimization using both a simulateddata set and an actual InSAR data set.
A. Simulated Data
We first used a set of synthetic data to analyze the robustnessof our proposed method. We use the same system parametersas for the San Francisco Bay area data set analyzed in thefollowing section.
In order to make the experiment as realistic as possible, wesimulated different types of noise, both due to atmosphericdisturbances at the acquisition times and due to temporal decor-relation noise.
Let us rewrite (1) using a matrix formalism to include thenew term due to possible unwrapping errors
δφ = Bv + cΔz + Aφα + m2π + n (15)
where B and A are index matrices (as in [5]), c is a vectorcorresponding to the DEM error Δz, and m2π = 2π · mj , formj ∈ Z, is a vector that takes into account possible unwrappingerrors.
We wish to simulate the interferometric phase as realisticas possible. We therefore consider all parameters affecting thephase estimation. Since our approach is based on analyzinginterferograms with SBs only, we do not consider spatial base-line decorrelation. Furthermore, we apply common-band spatialfiltering, so our spatial baseline decorrelation is highly reducedas only the common part of the spectrum which includesthe signal is retained [32]. The more interesting decorrelationphenomenon is temporal decorrelation resulting from changesin the scattering behavior over time.
In order to simulate temporal decorrelation effects [10], weconsider an exponentially decaying model as in [33], [34]
γtemporal = exp(−|Δt|
T
)(16)
where Δt is the time between the two SAR acquisitions usedto form the interferogram and T is a time constant definingthe correlation length of a scatterer. Furthermore, we modelthe temporal decorrelation vector n using an additive Gaussianrandom process with zero mean and standard deviation [10]
σ2φ = σ2
temporal =1 − γ2
temporal
2Lγ2temporal
(17)

540 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 49, NO. 1, JANUARY 2011
where L (L = 64 in our case) is the number of complex lookstaken to create the interferograms.
The path delay due to atmosphere is independent of thescattering mechanism. We model the atmospheric path delay,for the time of each SAR scene, as an additive Gaussian randomprocess with zero mean and standard deviation
σα =4π
λσLOS (18)
where σLOS is the LOS atmospheric delay standard deviation(typically on the order of 2–10 mm [23], [24]).
We used the root-mean-square error (rmse) between thesimulated (true) and the retrieved displacement phases as ameasure of fit
rmse(φ̂) =
{1N
N−1∑i=0
(φi − φ̂i − Δφi)2
}1/2
(19)
where Δφi = E[φ − φ̂] = 1/N∑N−1
i=0 (φi − φ̂i) is the meanvalue of the difference between the simulated phase φ and theretrieved phase φ̂. By subtracting the mean phase, we removethe bias due to the first data point being incorrectly estimated.For an unbiased estimate of φ̂, the rmse is equal to the standarddeviation.
Our experiments are based on the same temporal and spatialsampling as the data stack described in the following section.Based on 39 SAR scenes, we simulated 196 interferograms.We used the true temporal and spatial baselines to simulatethe temporal decorrelation and the DEM error contribution.Unwrapping errors were simulated by adding a phase of ±2πin a selected fraction of the interferograms. The interferogrampositions j where an additional error phase is added wereselected from a uniform distribution in the range from 0 to(M − 1). The DEM error was simulated using uniformly dis-tributed random numbers between ±7.5 m. We solved (4) and(5) for the DEM error, as well as the displacement signal, usingthe cubic displacement model in (2).
Fig. 3 shows three different displacement signals markedwith dotted lines:
(a) and (b) linear with a displacement rate of −1 cm/year;(c) and (d) linear with a displacement rate of −1 cm/year plus
a sigmoidal drop of about 5 cm;(e) and (f) linear with a displacement rate of −1 cm/year plus a
periodic component with a yearly amplitude of0.5 cm.
The L1-norm (triangles) and L2-norm (crosses) correspondto the estimated displacement values at each SAR acquisitiondate. The irregular sampling is due to the satellite being oper-ated in different modes. For a successful inversion, the crossesand triangles should line up with the dotted line correspondingto the original displacement signal.
The left panels show realizations of the simulation usingno noise sources. For the right panels, we added unwrappingerrors to the simulated differential phase vector in 5% randomlychosen interferograms.
From the left panels in Fig. 3, it is clear that, with zerounwrapping errors and zero atmospheric disturbances, both
L1-norm and L2-norm are able to correctly retrieve the threedifferent displacement signals. However, when we add unwrap-ping errors in the right panels in Fig. 3, we observe that theL1-norm is able to produce a near-perfect retrieval for nearlyall points, while the L2-norm solution has more severe outliers.
1) Monte Carlo Simulation Results: Fig. 3 shows only onerealization of the noise vector for each of the simulated signals.In order to produce more quantitative results, we implemented aseries of Monte Carlo simulation experiments, using a differentnumber of unwrapping errors (0%, 3%, 6%, 9%, 12%, and15%). For each step, we computed a Monte Carlo simulationwith 2000 iterations for three different atmospheric noise levels(0, 6, and 12 mm). We used the rmse according to (19) as ameasure of goodness of fit.
The left panels in Fig. 4 show Monte Carlo simulationresults for the three different displacement signals when using atemporal decorrelation model with time constant T = 600 days,while the right panels show results using a decorrelation timeconstant of T = 300 days. The temporal decorrelation timeconstants were selected similar to [34]. For each subfigure, wehave plotted the estimated rmse in millimeters as a functionof fraction of interferograms with unwrapping errors, for threedifferent values of atmospheric noise levels (0, 6, and 12 mm).The solid line corresponds to the L1-norm solution, while thedashed line corresponds to the L2-norm solution.
We find that, for low levels of unwrapping errors and lowlevels of atmospheric phase noise, the L1-norm and L2-normresults are quite similar. The L1-norm gives lower rmse as longas the atmospheric noise level is less than 12 mm, and more thanapproximately 4% unwrapping errors are present. The L2-normis optimized for Gaussian distributed errors and will thus tendto give a better fit when the misfit is caused by uncorrelated ran-dom Gaussian noise, e.g., from high atmospheric noise levels.
By applying a temporal decorrelation of T = 300 days, weobserve that the overall rmse for all signals is higher. However,the L1-norm is still able to better retrieve all displacementsignals, albeit at the cost of a higher rmse.
Furthermore, when the number of unwrapping errors in-creases, the L1-norm algorithm outperforms the L2-normfor nearly all values of atmospheric noise, particularly whenthe temporal decorrelation is high (a time constant of T =300 days). For a temporal decorrelation constant of T =300 days, the L1-norm shows a significantly lower rmse thanthe L2-norm.
From the simulated results, it can be noticed that the factordetermining the success of the L1-norm versus the L2-normmethod is the magnitude of atmospheric noise. The atmosphericdisturbances are strictly dependent on the distance between thepoint considered and the selected reference point. Therefore,the performance of the methods depends on the spatial pointdistribution. For areas that are close to the selected referencepoint, the atmospheric contribution is minimized for both meth-ods. However, it can safely be assumed that areas that are faraway from the reference point are more susceptible to unwrap-ping errors, and in these cases, the L1-norm will outperform theL2-norm, even if the atmospheric noise magnitude is higher.
Finally, we see that the sigmoidal-event-like displacementfunction in Fig. 4(c) and (d) is the most difficult to retrieve

LAUKNES et al.: INSAR DEFORMATION TIME SERIES 541
Fig. 3. Simulated data results. The temporal sampling corresponds to a true ERS-1/2 data stack. The simulated displacement is shown as a dotted linein all subfigures, while the L1-norm displacement estimates are marked with triangles, and the L2-norm displacement estimates are marked with crosses.(a) and (b) Linear displacement signal. (c) and (d) Sigmoid displacement signal. (e) and (f) Periodic displacement signal. The right panels show the samedisplacement signals as with unwrapping errors added in 5% of the interferograms. We used no temporal decorrelation or atmospheric disturbances in thissimulation. Clearly, the L1-norm gives a better fit as compared to the L2-norm solution.
for both L1-norm and L2-norm. This is because very fewSAR acquisitions cover the event, and thus, the risk of phasealiasing is high. The overall rmse is therefore higher for allsimulations.
We would also like to point out the influence of the numberof arcs (interferograms) used in reconstructing the displace-
ment signal. We carried out an experiment where we ran-domly removed a certain fraction of arcs and consequentlyreduced the rank of B in (7). Our results show that, whenapplying no other error sources (atmospheric signal, temporaldecorrelation, or unwrapping errors), the L1- and L2-normsperformed equally well. However, with a low number of arcs

542 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 49, NO. 1, JANUARY 2011
Fig. 4. Monte Carlo simulation results. Each subfigure shows rmse in millimeters versus fraction of unwrapping errors for different levels of atmospheric noise.The solid line corresponds to the L1-norm solution, while the dashed line corresponds to the L2-norm solution. The left panels show results using a temporaldecorrelation level of T = 600 days, while the right panels show results using 300 days. (a) and (b) Linear displacement. (c) and (d) Sigmoid displacement.(e) and (f) Periodic displacement. Three different atmospheric noise levels are plotted for each signal.
(badly defined design matrix B), the L2-norm becomes moresensitive than the L1-norm to spikelike noise sources such asunwrapping errors. For more Gaussian-like noise sources suchas atmosphere or temporal decorrelation, the performance wascomparable.
B. Actual Data
In this section, we present the results from applying thenew L1-norm phase inversion method on an actual data set.We have used data from a stack of 39 raw SAR scenes fromthe European Space Agency (ESA) European Remote Sensing

LAUKNES et al.: INSAR DEFORMATION TIME SERIES 543
Fig. 5. Analyzed ERS-1/2 data set shown in radar coordinates. (a) Mean intensity. (b) Mean coherence over all interferograms. (c) Selected pixels based oncoherence.
Fig. 6. Temporal coherence for the bay area data set, (a) estimated using the new L1-norm approach and (b) estimated using the L2 approach. Red is highercoherence—see the color bar in Fig. 8. The L1-norm method gives significantly higher coherence in the upper left area of the image.
(ERS) satellites ERS-1 and ERS-2, descending orbit (track 70,frame 2853), acquired in the period 1992–2001. We focused theraw SAR scenes to single look complex, coregistered all scenesto a common master geometry (August 2, 1997), and furthercomputed differential interferograms using the GSAR software[35]. We used a Shuttle Radar Topography Mission DEM toremove the topographic contribution. A spatial multilookingfactor of 4 looks in range and 16 looks in azimuth producedpixel sizes on ground of about 100 × 100 m.
Fig. 5(a) shows an intensity map obtained by averaging allcoregistered images. The scene covers not only the heavilyurbanized San Francisco Bay area but also large vegetatedareas, in particular, in the Santa Cruz mountain range that formsa ridge along the San Francisco Peninsula. The San Francisco
Bay area has been subject to several previous InSAR-basedstudies [6], [20], [36]–[38].
Fig. 2 shows the 196 interferograms that were computedusing a maximum threshold of 350 m for the spatial baselineand 1500 days for the temporal baseline. Each line correspondsto an interferogram between two acquisition dates. All interfer-ograms are connected in one big set; however, it is reasonableto expect that the first scenes from 1992 to 1993 are moresusceptible to unwrapping errors due to the lower level ofinterferogram redundancy compared with the later scenes.
From the mean coherence image in Fig. 5(b), we can seethat the points are clustered around the highly urbanized areasaround San Francisco Bay, with isolated clusters of coherentareas, e.g., the city of Santa Cruz close to the Pacific Ocean.

544 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 49, NO. 1, JANUARY 2011
Based on the mean coherence image, we can expect properunwrapping of all areas of this data set to be a challenge due tothe heavily vegetated regions that separate the scene into severalcoherent parts.
In order to find a set of coherent points for the SBASanalysis, we selected only those points that exhibited an esti-mated coherence value of more than at least 0.15 in 60% ofthe interferograms. Fig. 5(c) shows the pixels that have beenselected using the aforementioned coherence thresholds. Mostpixels are obviously selected in the heavily urbanized regionaround the San Francisco Bay area; however, large patches ofcoherent points are also found around the cities of Santa Cruzand Half Moon Bay, as well as around smaller villages in theSanta Cruz Mountains.
Following the pixel selection, we formed a network of the de-tected pixels shown in Fig. 5(c) using a Delaunay triangulation.We next interpolated the pixels located in the low-coherenceregions using only the good points, similar to [15]. We usedthe software SNAPHU, which is a statistical-cost network-flowalgorithm for phase unwrapping [22].
We referenced the unwrapped points to a single known point.We then estimated the low-pass displacement model and theDEM error parameters using both the SVD L1- and L2-norms.However, using the phase model based on only four parame-ters, the matrix system in (4) is largely simplified. We notedvery small differences between the L1- and L2-norm solutionsto (4).
We then subtracted the estimated DEM error phase from theunwrapped phase and applied the SVD inversion of v in (5)using both L1- and L2-norm minimizations. An estimate of thedisplacement vector follows from a trivial integration followedby a multiplication of λ/4π. Note that we did not includeatmospheric filtering since we are interested in comparing thetemporal coherence values defined as [13]
γ =
∣∣∣∣∣ 1M
M∑i=1
exp[j(δφi − δφ̂i)
]∣∣∣∣∣ , 0 ≤ γ ≤ 1 (20)
where δφ̂i is the retrieved differential interferometric phase[based on the phase estimates from (7) and the estimatedDEM error from (4)]. For pixels where γ → 1, we expect thatunwrapping is correct. The temporal coherence measure of fitis a good tool when the ground truth is not available.
Fig. 6(a) and (b) shows the estimated L1- and L2-norm tem-poral coherence for the selected pixels. The L1-norm inversionin (a) clearly shows an improvement over many areas comparedwith the L2-norm in (b). This is, in particular, visible in theareas along the Pacific coast where significant unwrappingerrors can be expected due to the sparse coverage of coherentpoints.
In Fig. 7, we plot the computed histograms related withthe temporal coherence maps in Fig. 6 on a logarithmicy-axis. For a temporal coherence value of 0.7 (which is an oftenused threshold value in time-series InSAR methods, e.g., [39]),about 20% more points are selected when using the L1-normapproach.
Fig. 7. Semilogarithmic plot of the temporal coherence histograms for bothL1- and L2-norms. The solid line is related with the L1-norm solution inFig. 6(a), while the dashed line is related with the L2-norm solution in Fig. 6(b).The color bar is related to the temporal coherence maps in Fig. 6.
Fig. 8. Scatter plot of the temporal coherence for the selected points of thebay area data set.
We would now like to point out the relation between the colorbar in Fig. 7 and the temporal coherence maps in Fig. 6. It isevident that the areas of lower L2-norm temporal coherence inFig. 6(b) correspond to the color in the intervals around the localmaxima in the L2-norm temporal coherence histogram (Fig. 7)(approximately 0.32, 0.53, and 0.72 in the dashed line). Thepoints in Fig. 6(b) with similar color relate with areas that havea higher likelihood of being unwrapped incorrectly. Likely, anumber of interferograms are incorrectly unwrapped in theseareas.
Finally, in Fig. 8, we show the scatter plot between theL1- and L2-norm estimated temporal coherence. The L1-normestimate shows a significant coherence improvement comparedwith the L2-norm. It is clear that, by using the L1-norm insteadof the L2-norm, a redistribution of coherence from low tohigher occurs. This is also evident from the histogram in Fig. 7.
The clear improvement in coherence can be explained bylooking at the way most phase unwrapping algorithms work;

LAUKNES et al.: INSAR DEFORMATION TIME SERIES 545
each spatial patch of coherent data points is correctly un-wrapped; however, possible phase unwrapping errors can bemanifested as discrete phase jumps of integer multiples of 2πbetween the patches. The effect of phase unwrapping errors ismitigated by using the L1-norm approach.
As a final point, we compare our results with the resultspresented by Lanari et al. [20], who applied SBAS analysis onthe same ERS data set. Our mean velocity maps compare verywell with the mean velocity map presented in [20]. However,after retaining only the pixels with a temporal coherence higherthan 0.7, our L1-norm-based SBAS results show a better pointcoverage, in particular, outside the urban areas.
VI. CONCLUSION
In this paper, we have demonstrated an alternative phaseinversion approach for SB InSAR methods. Our approach,which is based on the L1-norm, outperforms the standard LS(L2-norm)-based inversion that has been used in the literature,in particular, when phase unwrapping errors are prominent.
We implemented the L1-norm SVD approach into our SBASInSAR processor using an IRLS algorithm. By simulations,we have demonstrated that phase unwrapping errors will biasthe L2-norm deformation estimates and that, by using anL1-norm inversion, we are able to increase the temporal coher-ence. Application of our method to actual InSAR data acquiredby the ERS satellites shows a significant increase in coverageand coherence, since phase unwrapping errors are minimized inthe final estimation step.
ACKNOWLEDGMENT
The SAR data are copyrighted by ESA and were obtainedvia the WInSAR consortium. The authors would like to thankthe anonymous reviewers for their comments and suggestionsthat improved the quality of the paper. Part of this work wasconducted while T. R. Lauknes visited Stanford University.
REFERENCES
[1] A. K. Gabriel, R. M. Goldstein, and H. A. Zebker, “Mapping smallelevation changes over large areas: Differential radar interferometry,” J.Geophys. Res., vol. 94, no. B7, pp. 9183–9191, 1989.
[2] A. Ferretti, C. Prati, and F. Rocca, “Permanent scatterers in SAR inter-ferometry,” IEEE Trans. Geosci. Remote Sens., vol. 39, no. 1, pp. 8–20,Jan. 2001.
[3] A. Ferretti, C. Prati, and F. Rocca, “Nonlinear subsidence rate estima-tion using permanent scatterers in differential SAR interferometry,” IEEETrans. Geosci. Remote Sens., vol. 38, no. 5, pp. 2202–2212, Sep. 2000.
[4] A. Hooper, P. Segall, and H. Zebker, “Persistent scatterer interferometricsynthetic aperture radar for crustal deformation analysis, with applicationto Volcán Alcedo, Galápagos,” J. Geophys. Res., vol. 112, p. B07 407,Jul. 2007, DOI: 10.1029/2006JB004763.
[5] P. Berardino, G. Fornaro, R. Lanari, and E. Sansosti, “A new algorithmfor surface deformation monitoring based on small baseline differentialSAR interferograms,” IEEE Trans. Geosci. Remote Sens., vol. 40, no. 11,pp. 2375–2383, Nov. 2002.
[6] D. A. Schmidt and R. Bürgmann, “Time-dependent land uplift andsubsidence in the Santa Clara valley, California from a large InSARdata set,” J. Geophys. Res., vol. 108, no. B9, p. 2416, Sep. 2003,DOI: 10.1029/2002JB002267.
[7] F. Casu, M. Manzo, and R. Lanari, “A quantitative assessment of theSBAS algorithm performance for surface deformation retrieval fromDInSAR data,” Remote Sens. Environ., vol. 102, no. 3/4, pp. 195–210,Jun. 2006.
[8] R. Lanari, F. Casu, M. Manzo, G. Zeni, P. Berardino, M. Manuta,and A. Pepe, “An overview of the small baseline subset algorithm: ADInSAR technique for surface deformation analysis,” Pure Appl. Geo-phys., vol. 164, no. 4, pp. 637–661, Apr. 2007.
[9] A. Hooper, “A multi-temporal InSAR method incorporating both persis-tent scatterer and small baseline approaches,” Geophys. Res. Lett., vol. 35,p. L16 302, Aug. 2008, DOI: 10.1029/2008GL034654.
[10] H. A. Zebker and J. Villasenor, “Decorrelation in interferometric radarechoes,” IEEE Trans. Geosci. Remote Sens., vol. 30, no. 5, pp. 950–959,Sep. 1992.
[11] R. Hanssen and S. Usai, “Interferometric phase analysis for monitoringslow deformation processes,” in Proc. 3rd ERS Symp., Florence, Italy,Mar. 17–21, 1997, pp. 487–491.
[12] R. M. Goldstein, H. A. Zebker, and C. L. Werner, “Satellite radar interfer-ometry: Two-dimensional phase unwrapping,” Radio Sci., vol. 23, no. 4,pp. 713–720, Jul./Aug. 1988.
[13] A. Pepe and R. Lanari, “On the extension of the minimum costflow algorithm for phase unwrapping of multitemporal differentialSAR interferograms,” IEEE Trans. Geosci. Remote Sens., vol. 44, no. 9,pp. 2374–2383, Sep. 2006.
[14] M. Costantini, “A novel phase unwrapping method based onnetwork programming,” IEEE Trans. Geosci. Remote Sens., vol. 36,no. 3, pp. 813–821, May 1998.
[15] M. Costantini and P. A. Rosen, “A generalized phase unwrapping ap-proach for sparse data,” in Proc. IGARSS, Hamburg, Germany, Jun. 28–Jul. 2, 1999, vol. 1, pp. 267–269.
[16] T. R. Lauknes, A. Piyush Shanker, J. F. Dehls, H. A. Zebker,I. H. C. Henderson, and Y. Larsen, “Detailed rockslide mapping in north-ern Norway with small baseline and persistent scatterer interferomet-ric SAR time series methods,” Remote Sens. Environ., vol. 114, no. 9,pp. 2097–2109, Sep. 15, 2010.
[17] J. F. Claerbout and F. Muir, “Robust modeling with erratic data,” Geo-physics, vol. 38, no. 5, pp. 826–844, Oct. 1973.
[18] E. J. Schlossmacher, “An iterative technique for absolute deviations curvefitting,” J. Amer. Stat. Assoc., vol. 68, no. 344, pp. 857–859, Dec. 1973.
[19] J. A. Scales and A. Gersztenkorn, “Robust methods in inverse theory,” Inv.Probl., vol. 4, no. 4, pp. 1071–1091, Oct. 1988.
[20] R. Lanari, F. Casu, M. Manzo, and P. Lundgren, “Application of theSBAS-DInSAR technique to fault creep: A case study of the Haywardfault, California,” Remote Sens. Environ., vol. 109, no. 1, pp. 20–28,Jul. 2007.
[21] D. C. Ghiglia and M. D. Pritt, Two-Dimensional Phase Unwrapping:Theory, Algorithms, and Software. New York: Wiley, 1998.
[22] C. W. Chen and H. A. Zebker, “Two-dimensional phase unwrapping withuse of stastistical models for cost functions in nonlinear optimization,”J. Opt. Soc. Amer. A, Opt. Image Sci., vol. 18, no. 2, pp. 338–351,Feb. 2001.
[23] H. A. Zebker, P. A. Rosen, and S. Hensley, “Atmospheric effects ininterferometric synthetic aperture radar surface deformation and topo-graphic maps,” J. Geophys. Res., vol. 102, no. B4, pp. 7547–7563,1997.
[24] R. Hanssen, Radar Interferometry: Data Interpretation and ErrorAnalysis. Dordrecht, The Netherlands: Kluwer, 2001.
[25] P. J. Huber, Robust Statistics. New York: Wiley, 1981.[26] G. H. Golub and C. F. V. Loan, Matrix Computations, 3rd ed. Baltimore,
MD: The Johns Hopkins Univ. Press, 1996.[27] A. E. Beaton and J. W. Tukey, “The fitting of power series, meaning poly-
nomials, illustrated on band-spectroscopic data,” Technometrics, vol. 16,no. 2, pp. 147–185, May 1974.
[28] D. P. O’Leary, “Robust regression computation using iterativelyreweighted least squares,” SIAM J. Matrix Anal. Appl., vol. 11, no. 3,pp. 466–480, Jul. 1990.
[29] R. H. Byrd and D. A. Payne, “Convergence of the iteratively reweightedleast squares algorithm for robust regression,” The Johns Hopkins Univ.Press, Baltimore, MD, Tech. Rep. 313, 1979.
[30] R. Yarlagadda, J. B. Bednar, and T. L. Watt, “Fast algorithms forlp deconvolution,” IEEE Trans. Acoust., Speech, Signal Process.,vol. ASSP-33, no. 1, pp. 174–182, Feb. 1985.
[31] A. Gersztenkorn, J. B. Bednar, and L. R. Lines, “Robust iterative inversionfor the one-dimensional acoustic wave equation,” Geophysics, vol. 51,no. 2, pp. 357–368, Feb. 1986.
[32] R. Bamler and P. Hartl, “Synthetic aperture radar interferometry,” Inv.Probl., vol. 14, pp. R1–R54, 1998.
[33] F. Rocca, “Modeling interferogram stacks,” IEEE Trans. Geosci. RemoteSens., vol. 45, no. 10, pp. 3289–3299, Oct. 2007.
[34] G. Fornaro and A. Pauciullo, “LMMSE 3-D SAR focusing,” IEEE Trans.Geosci. Remote Sens., vol. 47, no. 1, pp. 214–223, Jan. 2009.

546 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 49, NO. 1, JANUARY 2011
[35] Y. Larsen, G. Engen, T. R. Lauknes, E. Malnes, and K. A. Høgda, “Ageneric differential interferometric SAR processing system, with applica-tions to land subsidence and snow-water equivalent retrieval,” presentedat the Fringe Workshop, ESA ESRIN, Frascati, Rome, Nov. 28–Dec. 2,2005, ESA SP-610.
[36] R. Bürgmann, D. Schmidt, R. M. Nadeau, M. d’Alessio, E. Fielding,D. Manaker, T. V. McEvilly, and M. H. Murray, “Earthquake potentialalong the northern Hayward fault, California,” Science, vol. 289, no. 5482,pp. 1178–1182, Aug. 2000.
[37] D. A. Schmidt, R. Bürgmann, R. M. Nadeau, and M. d’Alessio, “Distri-bution of aseismic slip rate on the Hayward fault inferred from seismicand geodetic data,” J. Geophys. Res., vol. 110, p. B08 406, Aug. 2005,DOI: 10.1029/2004JB003397.
[38] R. Bürgmann, G. Hilley, A. Ferretti, and F. Novali, “Resolving verticaltectonics in the San Francisco Bay area from permanent scatter InSARand GPS analysis,” Geology, vol. 34, no. 3, pp. 221–224, Mar. 2006.
[39] R. Lanari, P. Lundgren, M. Manzo, and F. Casu, “Satellite radar inter-ferometry time series analysis of surface deformation for Los Angeles,California,” Geophys. Res. Lett., vol. 31, p. L23 613, Dec. 2004,DOI: 10.1029/2004GL021294.
Tom R. Lauknes (S’02) received the Cand.Sci.(M.Sc.) degree in physics from the University ofTromsø, Tromsø, Norway, in 2004, where he is cur-rently working toward the Ph.D. degree in physics inthe Department of Physics and Technology, with hiswork focusing on interferometric satellite syntheticaperture radar (InSAR) for surface displacementstudies in rural terrain.
Since 2005, he has been a Research Scientist withthe Northern Research Institute Tromsø (Norut),Tromsø. From September 2007 to August 2008, he
was a Visiting Researcher with the Radar Interferometry Group, StanfordUniversity, Stanford, CA. His research interests include SAR and InSAR signalprocessing techniques applied to surface displacement monitoring, glaciermovement detection, and ionospheric studies.
Mr. Lauknes is a member of the American Geophysical Union.
Howard A. Zebker (M’87–SM’89–F’99) receivedthe B.S. degree from the California Institute of Tech-nology, Pasadena, in 1976, the M.S. degree from theUniversity of California, Los Angeles, in 1979, andthe Ph.D. degree from Stanford University, Stanford,CA, in 1984.
He is currently a Professor of geophysics and elec-trical engineering with Stanford University, wherehis research group specializes in radar remote sens-ing, especially InSAR, of the Earth and planets. Hehas more than 30 years of experience in spaceborne
radar, beginning with the SEASAT program in the 1970s and currently withthe radar science team on the Cassini mission of the National Aeronauticsand Space Administration (NASA). Other satellite programs where he hascontributed include NASA’s Spaceborne Imaging Radar-A, B, and C; theMagellan Mission to Venus; and the Voyager Mission to the outer planets.His major research focus is on the development of radar as a technique andthe application of this technique to basic Earth science. He has published over300 scholarly articles on remote sensing, and he teaches several courses onremote sensing at Stanford University to undergraduate and graduate studentsalike.
Dr. Zebker is a Fellow of the Electromagnetics Academy and a member ofthe American Geophysical Union.
Yngvar Larsen (S’00–M’04) received the Diploma(M.Sc.) degree in applied physics and the Ph.D.degree in physics from the University of Tromsø,Tromsø, Norway, in 1999 and 2003, respectively.
During the summer of 1999, he was a ResearchAssistant with the NATO SACLANT Undersea Re-search Centre, La Spezia, Italy. From July 2001 toJune 2002, he was a Visiting Researcher with theUniversity of Minnesota, Minneapolis. He is cur-rently a Senior Researcher with the Northern Re-search Institute Tromsø (Norut), Tromsø. His current
research interests include signal processing for synthetic aperture radar (SAR),particularly the applications of interferometric SAR.