Improving Army Aviation Situational Awareness with Agent ... · PDF fileImproving Army...
7
Improving Army Aviation Situational Awareness with Agent-Based Data Discovery Peter Gerken, Stephen Jameson, Brian Sidharta, and Joyce Barton Lockheed Martin Advanced Technology Laboratories Camden, NJ [pgerken, sjameson, bsidhart, jbarton]@atl.lmco.com ABSTRACT The Army Airborne Command and Control System (A2C2S) is being developed to provide situational awareness to the Joint Task Force commander and staff on-the-move in a UH-60 Blackhawk helicopter. The Airborne Manned/Unmanned Systems Technology Demonstration Science and Technology Objective program and the Hunter Standoff Killer Team Advanced Concept Technology Demonstration program are developing the Mobile Commander’s Associate (MCA) decision aiding system to support the command team on board the A2C2S. MCA will improve the command team’s capabilities by providing shared situation awareness, decision aiding, and unmanned air vehicle control and control handover among teamed platforms. Intelligent agents embedded in the MCA decision aiding system offload some of the command staff’s manual-intensive tasks by autonomously monitoring for information that improves the commander’s situational awareness. Lockheed Martin Advanced Technology Laboratories, under contract to the Army’s Aviation Applied Technology Directorate, provides Distributed Data Fusion and Agent-Based Data Discovery components that enable situation awareness for these programs. Introduction Future Army Aviation operations depend on the develop- ment of technologies and systems that support effective on- the-move command of airborne and ground-based maneuver forces through shared situational awareness and decision aiding technologies. The operational concepts for these technologies and systems are characterized by the extensive use of mobile sensing systems, unmanned platforms, and decision aiding systems in the forward elements of the combat force. As part of this effort, the A2C2S is being developed to provide situational awareness to the Joint Task Force commander and staff on-the-move in a UH-60 Blackhawk helicopter [1]. The A2C2S combines compre- hensive battlefield communication capabilities with a sophisticated computing facility hosting the Army Battle Command System (ABCS) suite of command and control software systems into a mobile command system from which the mobile commander can maintain command and situational awareness both in flight or on the ground. Two A2C2S prototypes are currently deployed with units at Ft. Hood and Ft. Campbell, and a production contract is in place to equip additional aircraft with A2C2S. The Airborne Manned/Unmanned Systems Technology- Demonstration (AMUST-D) Science and Technology Objective and the Hunter Standoff Killer Team (HSKT) Advanced Concept Technology Demonstration Programs, ____________ Presented at the American Helicopter Society 59 th Annual Forum, Phoenix, Arizona, May 6-8, 2003. Copyright © 2003 by the American Helicopter Society International, Inc. All rights reserved. led by the U.S. Army Aviation Applied Technology Directorate (AATD) at Ft. Eustis, VA, are developing addi- tional capabilities to support the mobile commander. The Mobile Commander’s Associate (MCA) decision aiding system being developed under AMUST-D provides capa- bilities to: improve the commander’s situation awareness, support command of a heterogeneous airborne team, and provide organic control and exploitation of an unmanned air vehicle (UAV). The MCA development effort leverages technology from several previous advanced technology efforts. It incorporates decision aiding, route planning, and data fusion technology developed under the Rotorcraft Pilot’s Associate (RPA) program. Team management technology developed under the Tactical Execution Decision Aid (TEDA) ACT II program and UAV control technology developed under the preceding AMUST-Baseline (AMUST-B) program also contribute to MCA. One primary focus of this technology is to provide improved commander situational awareness. Multi-Sensor Data Fusion, Decision Aiding, and organic control of a UAV all contribute to improving commander situational awareness by improving access to—and utility of data from—a variety of sensor sources. At the command level, however, much of the information that contributes to situational awareness does not come from specific sensors reporting on the battlefield. Instead, much necessary information is contained in a diverse set of heterogeneous distributed data sources such as the Joint Common Data Base (JCDB) that serves as the data repository for the ABCS applications. Making
-
Upload
truongngoc -
Category
Documents
-
view
219 -
download
0
Transcript of Improving Army Aviation Situational Awareness with Agent ... · PDF fileImproving Army...

Improving Army Aviation Situational Awareness withAgent-Based Data Discovery
Peter Gerken, Stephen Jameson, Brian Sidharta, and Joyce BartonLockheed Martin Advanced Technology Laboratories
Camden, NJ[pgerken, sjameson, bsidhart, jbarton]@atl.lmco.com
ABSTRACT
The Army Airborne Command and Control System (A2C2S) is being developed to provide situational awareness to the JointTask Force commander and staff on-the-move in a UH-60 Blackhawk helicopter. The Airborne Manned/Unmanned SystemsTechnology Demonstration Science and Technology Objective program and the Hunter Standoff Killer Team AdvancedConcept Technology Demonstration program are developing the Mobile Commander’s Associate (MCA) decision aidingsystem to support the command team on board the A2C2S. MCA will improve the command team’s capabilities by providingshared situation awareness, decision aiding, and unmanned air vehicle control and control handover among teamed platforms.Intelligent agents embedded in the MCA decision aiding system offload some of the command staff’s manual-intensive tasksby autonomously monitoring for information that improves the commander’s situational awareness. Lockheed MartinAdvanced Technology Laboratories, under contract to the Army’s Aviation Applied Technology Directorate, providesDistributed Data Fusion and Agent-Based Data Discovery components that enable situation awareness for these programs.
Introduction
Future Army Aviation operations depend on the develop-ment of technologies and systems that support effective on-the-move command of airborne and ground-based maneuverforces through shared situational awareness and decisionaiding technologies. The operational concepts for thesetechnologies and systems are characterized by the extensiveuse of mobile sensing systems, unmanned platforms, anddecision aiding systems in the forward elements of thecombat force. As part of this effort, the A2C2S is beingdeveloped to provide situational awareness to the Joint TaskForce commander and staff on-the-move in a UH-60Blackhawk helicopter [1]. The A2C2S combines compre-hensive battlefield communication capabilities with asophisticated computing facility hosting the Army BattleCommand System (ABCS) suite of command and controlsoftware systems into a mobile command system fromwhich the mobile commander can maintain command andsituational awareness both in flight or on the ground. TwoA2C2S prototypes are currently deployed with units at Ft.Hood and Ft. Campbell, and a production contract is in placeto equip additional aircraft with A2C2S.
The Airborne Manned/Unmanned Systems Technology-Demonstration (AMUST-D) Science and TechnologyObjective and the Hunter Standoff Killer Team (HSKT)Advanced Concept Technology Demonstration Programs,
____________Presented at the American Helicopter Society 59th Annual Forum,Phoenix, Arizona, May 6-8, 2003. Copyright © 2003 by theAmerican Helicopter Society International, Inc. All rights reserved.
led by the U.S. Army Aviation Applied TechnologyDirectorate (AATD) at Ft. Eustis, VA, are developing addi-tional capabilities to support the mobile commander. TheMobile Commander’s Associate (MCA) decision aidingsystem being developed under AMUST-D provides capa-bilities to: improve the commander’s situation awareness,support command of a heterogeneous airborne team, andprovide organic control and exploitation of an unmanned airvehicle (UAV).
The MCA development effort leverages technology fromseveral previous advanced technology efforts. It incorporatesdecision aiding, route planning, and data fusion technologydeveloped under the Rotorcraft Pilot’s Associate (RPA)program. Team management technology developed underthe Tactical Execution Decision Aid (TEDA) ACT IIprogram and UAV control technology developed under thepreceding AMUST-Baseline (AMUST-B) program alsocontribute to MCA.
One primary focus of this technology is to provide improvedcommander situational awareness. Multi-Sensor DataFusion, Decision Aiding, and organic control of a UAV allcontribute to improving commander situational awarenessby improving access to—and utility of data from—a varietyof sensor sources. At the command level, however, much ofthe information that contributes to situational awarenessdoes not come from specific sensors reporting on thebattlefield. Instead, much necessary information is containedin a diverse set of heterogeneous distributed data sourcessuch as the Joint Common Data Base (JCDB) that serves asthe data repository for the ABCS applications. Making

effective use of this information requires tailored retrievalstrategies, persistent intelligent monitoring, and complexinteroperability protocols.
Intelligent Agents, an emerging technology being in-creasingly applied to military operational problems, areideally suited to addressing these requirements. ATL hasbeen developing intelligent agent technology and applica-tions for DARPA and DoD laboratories for the past eightyears. Under the AMUST-D program, ATL has leveragedthis extensive experience to develop the Agent-Based DataDiscovery component that provides retrieval, monitoring,and interoperability capabilities to the MCA.
This paper describes the Agent-Based Data Discoverytechnology and its application in AMUST-D and HSKT. Wealso describe work that has been done to gather data on theeffectiveness and benefits of this technology in promotingsituational awareness among a distributed team of platforms.We present the results of this work and offer conclusionsabout the potential operational benefits of these tech-nologies.
Background
Army Airborne Command and Control System (A2C2S)
The U.S. Army has long recognized the need to have mobilecommand and control platforms to accommodate the needsof a maneuver commander to provide command on-the-move. Such situations can arise during a rapidly evolvinghigh intensity conflict, in a situation like Afghanistan whereforces are spread over a large geographic area with no fixedborders between areas of friendly and hostile control, orduring humanitarian assistance operations in which on-sitepresence of the commander is required. Previous systems didnot permit access to the increasingly digitized Army andJoint Command and Control infrastructure. To address thisshortfall, the U.S. Army Aviation Applied TechnologyDirectorate (AATD) began development of a prototypesystem in support of PEO C3T and PEO Aviation,designated the Army Airborne Command and ControlSystem (A2C2S), that incorporated comprehensive digitaland voice communication capabilities as well as thecomputing resources required to host a subset of the ArmyBattle Command System (ABCS).
The A2C2S, housed in the rear of a UH-60 Blackhawkhelicopter, is configured as a 5-seat mobile command post(Figure 1). Each seat has a flat-panel display and keyboard,which can be independently switched to access one of eightcomputer processors housed in a rack. These processors runa set of ABCS applications including the Maneuver ControlSystem (MCS), All-Source Analysis System (ASAS), andthe Army Field Artillery Tactical Data System (AFATDS).These applications provide the commander with a commonpicture of the battle through the integration of near-real-timesituational information and sensor data into a force level
Figure 1. Artist’s conception of A2C2S in a UH-60Blackhawk accommodating the commander and four of hisstaff.
database. Two larger displays at the front of the compart-ment, also independently switchable, allow important data tobe displayed to the entire staff. The A2C2S also includescommunication capabilities to permit voice and data accessby the commander and his staff to all required channels andtactical data links, including access to the Tactical Internetand voice communication by SINCGARS and SATCOMradios.
Two A2C2S prototype systems have been developed to date.Each prototype includes the consoles and displays, rack-mounted computing systems, and the required radio systems,installed in a specially modified UH-60L aircraft. The firstdemonstrator system was deployed with the 4th InfantryDivision at Fort Hood, TX, in June 2001, and the secondsoon thereafter with the 101st Air Assault Division at FortCampbell, KY. A production contract for an initial buy ofeight systems has been let to Raytheon, and the first deliveryof production units is scheduled for later this year.
Mobile Commander’s Associate (MCA)
The MCA is a decision aiding system [2] developed underAMUST-D. It consists of a set of software modules in anopen-architecture framework built on top of an Open Sourcesoftware infrastructure and COTS hardware [3]. Majorcomponents of MCA include Decision Aiding, UAVControl, GUI, Data Fusion, and the Agent-Based DataDiscovery capability described in this paper.
The MCA Decision Aiding components support a maneuvercommander in managing a mission involving a mixed teamof joint airborne units, including attack helicopters, reconhelicopters, Air Force or Navy strike aircraft, and UAVs.Mission management capabilities include creating andediting a mission plan, automated planning and dissemin-ation of routes for team members, managing teamcomposition, and monitoring team routes for threat and otherviolations.
Cou
rtes
y of
AA
TD

MCA UAV Control includes capabilities to permit amaneuver commander to exploit the capabilities of anorganic surveillance UAV in developing situational aware-ness and monitoring the battle. UAV Control capabilitiesinclude managing two-way communication with a UAV viaTactical Common Data Link (TCDL), dissemination ofroutes to the UAV, managing the UAV sensor, keeping trackof area scanned by the sensor, and monitoring UAV flightfor threat or other violations.
The MCA GUI includes sophisticated visualization featuresto enhance the commander’s situational awareness. Using acommon standard look-and-feel, based on the ABCS look-and-feel, the GUI provides capabilities to display battlespaceentities, routes, plan features, and other control measures asoverlays on a variety of map, chart, and imagery formats.
MCA Data Fusion is based on the RPA Data Fusiondescribed in the next section, augmented with the Grapevinecapability [4] to provide a Distributed Data Fusion [5]capability linking the MCA with the Warfighter’s Associatebeing developed under AMUST-D for deployment on theApache Longbow helicopter.
Rotorcraft Pilot’s Associate (RPA)
From 1993 to 1999, ATL participated in the Army’s Rotor-craft Pilot’s Associate (RPA) Advanced TechnologyDemonstration program, sponsored by AATD. ATLdeveloped the multi-sensor Data Fusion (DF) system thatprovides a common fused track picture to the RPA pilot andRPA decision aiding systems. The DF system fused kine-matic and classification data of up to 200 battlefield entitiesfrom 14 different types of onboard and offboard sensors inreal time. The RPA system was successfully flight demon-strated on an AH-64D in August 1999.
Intelligent Agent Technology
In the context of this paper, an intelligent agent is defined asa persistent software process that is able to interact with itsenvironment in order to perform tasks on behalf of the user.An intelligent agent has the following three key character-istics. An agent is autonomous because it is given a set ofinstructions to perform without direct control of a humanoperator. An agent is adaptive because it is able to adjustwhat it will do based on its environment. An agent iscooperative because it can work together with other agentsor with a human operator to accomplish its goals.
ATL has been developing agent technology since 1995 tosupport various interoperability roles such as data dis-semination, retrieval, and monitoring of key informationstored in legacy, stove-piped applications. At the core of thisagent technology is an agent architecture called ExtendableMobile Agent Architecture (EMAA) [6]. EMAA is a JavaTM
based framework that allows a developer to create softwareagents by building an itinerary for the agent to follow. An
itinerary contains a set of activities from a set of buildingblocks called tasks. A collection of generic tasks can bewritten that can be reused in multiple activities. An agentsystem consists of one or more machines that contain a dockthat manages when an agent is launched. When the docklaunches an agent, it determines where its activity needs torun and, if necessary, the agent migrates to another dock(Figure 2).
Figure 2. Agents may migrate to another dock to accesslocal resources and then return with the information.
EMAA agents have been used in a variety of projectsbeginning with the Domain Adaptive Information System(DAIS). DAIS used agents to query heterogeneous databasesover a low bandwidth and unreliable military network. Theagents would migrate to where the data was stored, processthe data, and return the information analysts needed toperform their jobs. DAIS was deployed with the Army 201st
Military Intelligence (MI) brigade at Fort Lewis and becamepart of their standard operating procedures. During theexercises, the agents were able to find and retrieve valuableinformation within minutes rather than days. The infor-mation the agents gathered was key to accomplishing theexercise’s objective [7].
EMAA agents can connect legacy stove-piped applicationstogether and allow them to interoperate with each other.ATL has participated in six of the last seven Fleet BattleExperiments with the Navy where agents allow the existingapplications to share information to solve problems such as:theater air missile defense, time critical targeting, and trackmanagement within a coalition environment.
Since EMAA agents generally have access to a large amountof data, it is easy for them to also monitor for specific eventsand alert the user when the events occur. This was firstdemonstrated in a project for the U.S. Air Force Air Mobil-ity Command where agents were tasked to monitor forscheduling conflicts in an air mobility plan [8].
EMAA agents can improve the quality of the CommonTactical Picture (CTP). Previously, DF would only acceptsensor data information. For the Army ACT II proof-of-concept demonstration at the Army Air Maneuver BattleLaboratory, DF used sentinel agents to find better qualitydata in the Joint Common Database (JCBD) and fused thenew data with the current CTP [4,9].
ATL is leveraging the work done on these and other projectsin AMUST-D to allow the agents to find and monitorinformation in a variety of heterogeneous data sources togive the A2C2S commander improved situational awarenessof the battlespace.
Agent-Based Data Discovery (ABDD)
ABDD’s role in MCA is to use agents to retrieve relevantinformation from the JCDB, provide interoperability amonga variety of applications, monitor for specific events andalert the commander when those events occur.
Data Retrieval
Agents are tasked to find additional information stored in theJCDB that is not available to Distributed Data Fusion (DDF)through sensor inputs. All of the ABCS systems with in theA2C2S have access to the JCDB and periodically update itwith information. Based on the JCDB’s schema, we havediscovered that tables exist to store information about blueorganizations, red organizations, facilities, and control mea-sures. Agents retrieve this information and store it in aninternal cache for use by MCA. Agents supplement thetactical picture by retrieving control measures from theJCDB and forwarding them to MCA for display to thecommander.
Interoperability
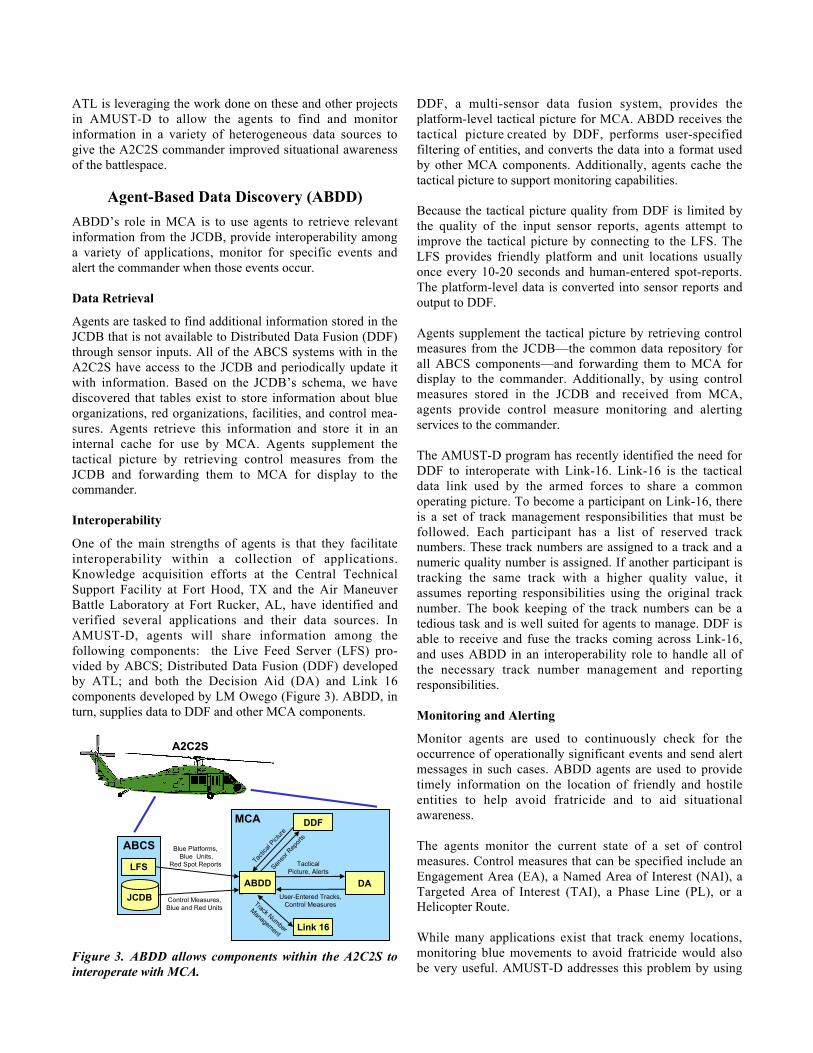
One of the main strengths of agents is that they facilitateinteroperability within a collection of applications.Knowledge acquisition efforts at the Central TechnicalSupport Facility at Fort Hood, TX and the Air ManeuverBattle Laboratory at Fort Rucker, AL, have identified andverified several applications and their data sources. InAMUST-D, agents will share information among thefollowing components: the Live Feed Server (LFS) pro-vided by ABCS; Distributed Data Fusion (DDF) developedby ATL; and both the Decision Aid (DA) and Link 16components developed by LM Owego (Figure 3). ABDD, inturn, supplies data to DDF and other MCA components.
MCA
ABCS
LFS
DA
DDF
Link 16
Blue Platforms, Blue Units,
Red Spot Reports
Control Measures,Blue and Red Units
TacticalPicture, Alerts
Tactic
al P
ictur
e
Senso
r Rep
orts
User-Entered Tracks,Control MeasuresTrack Number
Management
A2C2SA2C2S
ABDDJCDB
Figure 3. ABDD allows components within the A2C2S tointeroperate with MCA.
DDF, a multi-sensor data fusion system, provides theplatform-level tactical picture for MCA. ABDD receives thetactical picture created by DDF, performs user-specifiedfiltering of entities, and converts the data into a format usedby other MCA components. Additionally, agents cache thetactical picture to support monitoring capabilities.
Because the tactical picture quality from DDF is limited bythe quality of the input sensor reports, agents attempt toimprove the tactical picture by connecting to the LFS. TheLFS provides friendly platform and unit locations usuallyonce every 10-20 seconds and human-entered spot-reports.The platform-level data is converted into sensor reports andoutput to DDF.
Agents supplement the tactical picture by retrieving controlmeasures from the JCDB—the common data repository forall ABCS components—and forwarding them to MCA fordisplay to the commander. Additionally, by using controlmeasures stored in the JCDB and received from MCA,agents provide control measure monitoring and alertingservices to the commander.
The AMUST-D program has recently identified the need forDDF to interoperate with Link-16. Link-16 is the tacticaldata link used by the armed forces to share a commonoperating picture. To become a participant on Link-16, thereis a set of track management responsibilities that must befollowed. Each participant has a list of reserved tracknumbers. These track numbers are assigned to a track and anumeric quality number is assigned. If another participant istracking the same track with a higher quality value, itassumes reporting responsibilities using the original tracknumber. The book keeping of the track numbers can be atedious task and is well suited for agents to manage. DDF isable to receive and fuse the tracks coming across Link-16,and uses ABDD in an interoperability role to handle all ofthe necessary track number management and reportingresponsibilities.
Monitoring and Alerting
Monitor agents are used to continuously check for theoccurrence of operationally significant events and send alertmessages in such cases. ABDD agents are used to providetimely information on the location of friendly and hostileentities to help avoid fratricide and to aid situationalawareness.
The agents monitor the current state of a set of controlmeasures. Control measures that can be specified include anEngagement Area (EA), a Named Area of Interest (NAI), aTargeted Area of Interest (TAI), a Phase Line (PL), or aHelicopter Route.
While many applications exist that track enemy locations,monitoring blue movements to avoid fratricide would alsobe very useful. AMUST-D addresses this problem by using
JCDB

agents to manage and monitor track information on blueforces. When specific events occur, the agents warn thecommander of potential danger. There are several scenariosin which agent monitoring can aid in fratricide avoidance.
An engagement area is where a commander intends to attackand destroy the enemy. If a blue force unknowingly entersan EA, it may be inadvertently hit by friendly fire. Byhaving an agent monitor each of the EA’s and send an alertwhen a blue force is discovered to be in such potentialdanger, the commander has the opportunity to call the blueforce away from the EA or call off an attack to avoidfratricide (Figure 4).
Figure 4. Blue found in an engagement area.
Phase lines (PL) are used to control and coordinate militaryoperations during a battle. Under normal circumstances theblue unit notifies the commander when it is about to cross aPL [10]. However, sometimes a unit inadvertently crossesthe line. To assure that the commander is aware of PLcrossings, an agent monitors the line and alerts the com-mander (Figure 5). It is up to the commander to determine ifthe blue force crossed too soon or if the next phase of thebattle should continue.
Figure 5. Blue found crossing a phase line.
Agents also monitor helicopter routes to determine if thehelicopter will encounter blue forces along the route. If afriendly entity is found to be near the route, an alert is sentso that the commander can notify the affected blue forces(Figure 6). This also helps the helicopter pilot determinewhether or not encountered entities are friendly or hostile,preventing friendly fire.
Figure 6. Blue found near helicopter route.
Agents monitor the locations of red forces within controlmeasures. When a red force appears in a control measuresuch as an EA or NAI, an agent sends an alert (Figure 7).This alert could be considered a decision point that helps thecommander choose a course of action.
Figure 7. Red found in a named area of interest.
The Commander’s Critical Information Requirements(CCIR) help the commander make critical decisions anddetermine or validate courses of action [10]. The commandercan configure the agents to find data that match the CCIR.Monitoring can be for a specific affiliation (blue, red,unknown, etc.) or a combination of affiliations. The com-mander can also assign custom monitoring behaviors for aspecific unit such as when the unit enters a particular controlmeasure.
Example Scenario
Before a mission begins, a plan is developed that lists theobjectives and courses of action needed to successfullycomplete the mission. Various control measures are createdand entered into the Maneuver Control System and sharedwith the rest of the ABCS systems by storing them in theJCDB. These control measures include the following: a setof engagement areas where the commander intends to attackthe enemy; a set of named areas of interests that the com-mander will need to monitor to determine which engagementarea to attack; and a set of phase lines used for control andcoordination of the mission. The commander briefs his staffto look for specific information that will help him determinehis course of action during the mission.
The following scenario demonstrates how agents might beused to improve the commander’s battlespace awareness andprevent fratricide. The control measures and locations ofvarious alerts generated in the scenario are shown in Figure8.
When the mission begins, the ground tactical operationscenter updates the A2C2S aboard the Blackhawk. The com-mander’s staff configures the agents to monitor the control
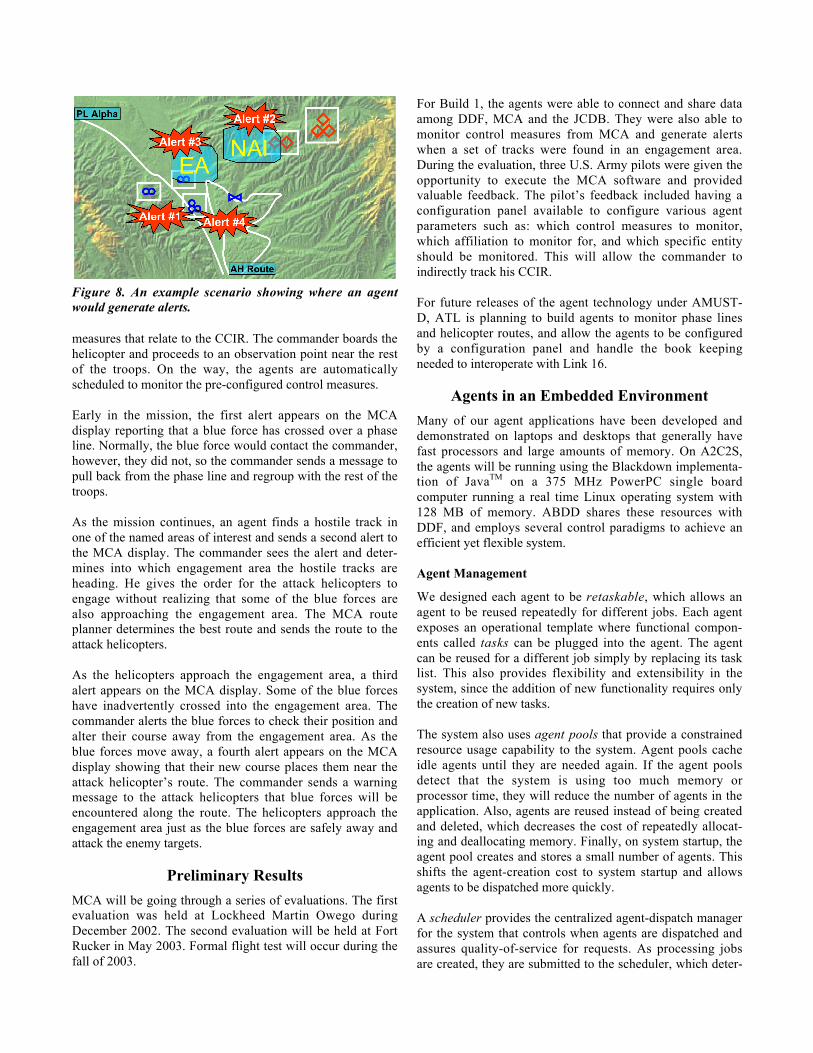
Figure 8. An example scenario showing where an agentwould generate alerts.
measures that relate to the CCIR. The commander boards thehelicopter and proceeds to an observation point near the restof the troops. On the way, the agents are automaticallyscheduled to monitor the pre-configured control measures.
Early in the mission, the first alert appears on the MCAdisplay reporting that a blue force has crossed over a phaseline. Normally, the blue force would contact the commander,however, they did not, so the commander sends a message topull back from the phase line and regroup with the rest of thetroops.
As the mission continues, an agent finds a hostile track inone of the named areas of interest and sends a second alert tothe MCA display. The commander sees the alert and deter-mines into which engagement area the hostile tracks areheading. He gives the order for the attack helicopters toengage without realizing that some of the blue forces arealso approaching the engagement area. The MCA routeplanner determines the best route and sends the route to theattack helicopters.
As the helicopters approach the engagement area, a thirdalert appears on the MCA display. Some of the blue forceshave inadvertently crossed into the engagement area. Thecommander alerts the blue forces to check their position andalter their course away from the engagement area. As theblue forces move away, a fourth alert appears on the MCAdisplay showing that their new course places them near theattack helicopter’s route. The commander sends a warningmessage to the attack helicopters that blue forces will beencountered along the route. The helicopters approach theengagement area just as the blue forces are safely away andattack the enemy targets.
Preliminary Results
MCA will be going through a series of evaluations. The firstevaluation was held at Lockheed Martin Owego duringDecember 2002. The second evaluation will be held at FortRucker in May 2003. Formal flight test will occur during thefall of 2003.
For Build 1, the agents were able to connect and share dataamong DDF, MCA and the JCDB. They were also able tomonitor control measures from MCA and generate alertswhen a set of tracks were found in an engagement area.During the evaluation, three U.S. Army pilots were given theopportunity to execute the MCA software and providedvaluable feedback. The pilot’s feedback included having aconfiguration panel available to configure various agentparameters such as: which control measures to monitor,which affiliation to monitor for, and which specific entityshould be monitored. This will allow the commander toindirectly track his CCIR.
For future releases of the agent technology under AMUST-D, ATL is planning to build agents to monitor phase linesand helicopter routes, and allow the agents to be configuredby a configuration panel and handle the book keepingneeded to interoperate with Link 16.
Agents in an Embedded Environment
Many of our agent applications have been developed anddemonstrated on laptops and desktops that generally havefast processors and large amounts of memory. On A2C2S,the agents will be running using the Blackdown implementa-tion of JavaTM on a 375 MHz PowerPC single boardcomputer running a real time Linux operating system with128 MB of memory. ABDD shares these resources withDDF, and employs several control paradigms to achieve anefficient yet flexible system.
Agent Management
We designed each agent to be retaskable, which allows anagent to be reused repeatedly for different jobs. Each agentexposes an operational template where functional compon-ents called tasks can be plugged into the agent. The agentcan be reused for a different job simply by replacing its tasklist. This also provides flexibility and extensibility in thesystem, since the addition of new functionality requires onlythe creation of new tasks.
The system also uses agent pools that provide a constrainedresource usage capability to the system. Agent pools cacheidle agents until they are needed again. If the agent poolsdetect that the system is using too much memory orprocessor time, they will reduce the number of agents in theapplication. Also, agents are reused instead of being createdand deleted, which decreases the cost of repeatedly allocat-ing and deallocating memory. Finally, on system startup, theagent pool creates and stores a small number of agents. Thisshifts the agent-creation cost to system startup and allowsagents to be dispatched more quickly.
A scheduler provides the centralized agent-dispatch managerfor the system that controls when agents are dispatched andassures quality-of-service for requests. As processing jobsare created, they are submitted to the scheduler, which deter-

mines when the job should be assigned to an agent. For jobsthat the user initiates, the scheduler immediately assigns thejob to an agent. If the scheduler determines that resourcesare low, it prioritizes the jobs so time-critical jobs are startedas quickly as possible and delays certain jobs to avoid spikesin resource usage.
Clustering
As conventional situational assessment applications musttypically be able to handle thousands of tracks in the battle-space, we employ geographical clustering to optimize tracksearches. The clustering algorithm groups together tracksthat are positioned within close proximity to each other. Thisallows the system to use fast bounding-box checks to quick-ly determine which tracks are near a search area and reducesthe problem to a manageable size.
Conclusion
The number of applications and amount of data in thebattlespace will continue to grow as the armed forcesbecome a digitized force. We have described how ATL’sagent technology can currently be used to manage andmonitor the information being generated. We have shownhow agents are able to improve the situational awareness ofthe commander by monitoring and alerting on the informa-tion they gather from DDF, MCA and ABCS. This addition-al awareness gives the commander an advantage on thebattlespace and allows him to autonomously monitor the redforces and avoid friendly fire with the troops under hiscommand. This paper also described how we are managingour agent technology in an embedded environment withlimited memory and processor constraints. The agent workdone under the AMUST-D project continues to build afoundation of the shared situational awareness capabilitiesthat will be needed in the future to support the mobilecommander.
Acknowledgments
This research was partially funded by the Aviation AppliedTechnology Directorate under Agreement No. DAAH10-01-2-0008. The U.S. Government is authorized to reproduceand distribute reprints for Government purposes notwith-standing any copyright notation thereon.
We would like to thank AATD for their continued support ofour agent technology. We would also like to thank the manypeople at Fort Hood, TX and Fort Rucker, AL for allowingus to use their facilities and supporting our efforts to testconnectivity to the ABCS systems and the LFS.
Disclaimers
The views and conclusions contained in this document arethose of the authors and should not be interpreted as
representing the official policies, either expressed orimplied, of the Aviation Applied Technology Directorate orthe U.S. Government.
Previously published is a detailed discussion of DDF whichalso mentions the use of agents [2], however, the paper forthis year’s conference focuses on the data discovery, mon-itoring and alerting capabilities of the agents.
References
[1] Gannon, S., “Integration of US Army Command andControl Systems into a UH-60 Blackhawk,” American Heli-copter Society Forum 58th, Avionics and Systems Session,Montreal, Canada, June 2002.
[2] Stiles, P., Bodenhorn, C., and Galamback, K., "MobileCommander's Associate for AMUST-D," American Heli-copter Society 59th Annual Forum, Phoenix AZ, May 2003.
[3] Hrustich, J., "Commercial and Open Source Software inRotorcraft Avionics Systems," American Helicopter Society58th Annual Forum, Montreal, CA, June 2002.
[4] Pawlowski, A. and Stoneking, C., “Army AviationFusion of Sensor-Pushed and Agent-Pulled Information,”American Helicopter Society 57th Annual Forum, Washing-ton, DC, May 2001.
[5] Jameson, S.M. and Stoneking, C., "Army AviationSituational Awareness Through Intelligent Agent-BasedDiscovery, Propagation, and Fusion of Information,"American Helicopter Society Forum 58th, Avionics andSystems Session, Montreal, Canada, June 2002.
[6] Lentini, R., Rao, G., and Thies, J., “EMAA: An Extend-able Mobile Agent Architecture,” AAAI Workshop, Soft-ware Tools for Developing Agents, July 1998.
[7] Whitebread, K. and Stein, H., “Domain-Adaptive Infor-mation Systems (DAIS),” Proceedings of the Second Inter-national Conference on Autonomous Agents (Agents ’98).
[8] McGrath, S., Chacón, D., and Whitebread, K., “Intelli-gent Mobile Agents in the Military Domain,” Fourth Inter-national Conference on Autonomous Agents, June 2000.
[9] Hess, J. and Patteson, S., "Adapting and ExpandingRotorcraft Decision Aids for the Battle Commander," Amer-ican Helicopter Society National Forum 57, Washington,DC, May 2001.
[10] Wade, N. (Ed), The Battle Staff SMARTbook, USA:The Lightning Press, 1999.