[IEEE] Remote Calibration Using Mobile Multiagent Technology
7
24 IEEE TRANSACTIONS ON INSTRUMENTATION ANDMEASUREMENT, VOL. 54, NO. 1, FEBRUARY 2005 Remote Calibration Using Mobile, Multiagent Technology Mihaela M. Albu, Member, IEEE, Alessandro Ferrero, Fellow, IEEE, Florin Mihai, Member, IEEE, and Simona Salicone, Student Member, IEEE Abstract—Instrument calibration, though unavoidable, is exten- sively time and resource consuming. It often involves a distinct layer of data management and security. Since many of the avail- able digital instruments are provided with communication inter- faces, one can build a remote calibration system from the actual hardware and a computing unit with Internet connection capabili- ties. This paper, after showing a simple client–server architecture, discusses how the use of mobile, multiagent techniques is expected to solve most of the security issues, working as well and effectively as a traditional, agent-free client–server architecture. Index Terms—Mobile agents, remote calibration. I. INTRODUCTION T HE RECENT development of PC-driven instruments and the evolution of the networking capabilities of PCs over a world-wide network (Internet) has led to the realization of distributed measurement systems, for both didactic [1], [2] and industrial [3] applications. The remote calibration of measuring instruments is an inter- esting application of these techniques that has not yet been fully exploited, mainly due to the legal issues involved by the pos- sible lack of security which is intrinsically associated with the remote operations. However, the capability of calibrating an instrument on-site instead of sending it to a calibrating lab, provided the instrument itself has a standard interface to a PC and a calibrating device can be sent to the instrument’s location and operated remotely, allows to save time and money, because of both the lower cost of the calibration operation and the reduced time interval during which the instrument is not available [due to the time spent trav- eling back and forth from the calibration lab and waiting for the device under test (DUT) to be calibrated]. This approach appears to be particularly effective whenever the calibration of low-cost process instruments is involved. In fact, the calibration of these instruments is generally required by several quality standards, and is quite expensive, if compared with the instrument cost. However, on the other hand, since it does not require top-class calibration devices nor strict ambient conditions, it can be performed by using traveling standards. Manuscript received June 15, 2003; revised April 30, 2004. M. M. Albu and F. Mihai are with the Facultatea de Electrotehnic˘ a, Uni- versitatea Politehnica Bucures ¸ti, 313-77206 Bucures ¸ti, România (e-mail: [email protected]). A. Ferrero and S. Salicone are with the Dipartimento di Elettrotecnica, Politecnico di Milano, 32-20133 Milano, Italy (e-mail: alessandro.fer- [email protected]). Digital Object Identifier 10.1109/TIM.2004.838139 Presently, the interconnection capabilities offered by the commercial software available for the development of virtual instruments (VIs) make possible the immediate implementation of a client–server architecture for driving the instrument to be calibrated and the calibrating device remotely. This solution, however, requires installing the software implementing the client structure on a computing platform at the remote cali- bration site. This involves several security issues, since the installation should be done by the staff of the customer who or- dered the calibration, and is not under control of the staff of the calibration laboratory who will sign the calibration certificate. II. CALIBRATION SOLUTIONS From a strict technical point of view, a remote calibration can be executed with a client–server architecture, where the instru- ment to be calibrated (DUT) and the calibrating device are situ- ated in the same location (though not necessarily on the same in- ternet node) and connected to a client system. The client system, which comprises at least two different client applications, one corresponding to the DUT and the other one to the calibrator de- vice (CLD) receives the commands from the server, running on a computing platform fully controlled in the calibration labora- tory, and sends them to these devices through the selected inter- face. It scans the instrument reading and transmits it to the server over the active Internet connection. All operations required to prepare the calibration certificate are performed by the server. Several improvements can be carried out on this basic structure, mainly concerned with self-recognition of the available inter- face and the instrument to be calibrated and with the implemen- tation of security functions to prevent illegal modifications of the software running at the client site. Examples of the client–server architectures for remote cali- bration, carried out in the LabVIEW 1 environment, are shown in Figs. 1 and 2. Despite all possible improvements, this solution requires the installation of the client VI at the client’s site. This operation may not be in total control of the staff of the calibration lab (mainly because sending a person on site would be more expen- sive than sending the instrument to the calibration lab), thus, plugging a possible hole in the security of the whole process, since the client VI can be illegally modified before installing it. In this technology, the master application has to be launched first, and the client application will then connect to it, using previous information on the IP number of the computer unit at the calibration site. 1 http://www.ni.com 0018-9456/$20.00 © 2005 IEEE
description
remote calibration using mobiles
Transcript of [IEEE] Remote Calibration Using Mobile Multiagent Technology
![Page 1: [IEEE] Remote Calibration Using Mobile Multiagent Technology](https://reader043.fdocuments.in/reader043/viewer/2022032522/55cf8f37550346703b9a1292/html5/page/1.jpg)
24 IEEE TRANSACTIONS ON INSTRUMENTATION AND MEASUREMENT, VOL. 54, NO. 1, FEBRUARY 2005
Remote Calibration Using Mobile,Multiagent Technology
Mihaela M. Albu, Member, IEEE, Alessandro Ferrero, Fellow, IEEE, Florin Mihai, Member, IEEE, andSimona Salicone, Student Member, IEEE
Abstract—Instrument calibration, though unavoidable, is exten-sively time and resource consuming. It often involves a distinctlayer of data management and security. Since many of the avail-able digital instruments are provided with communication inter-faces, one can build a remote calibration system from the actualhardware and a computing unit with Internet connection capabili-ties. This paper, after showing a simple client–server architecture,discusses how the use of mobile, multiagent techniques is expectedto solve most of the security issues, working as well and effectivelyas a traditional, agent-free client–server architecture.
Index Terms—Mobile agents, remote calibration.
I. INTRODUCTION
THE RECENT development of PC-driven instruments andthe evolution of the networking capabilities of PCs over
a world-wide network (Internet) has led to the realization ofdistributed measurement systems, for both didactic [1], [2] andindustrial [3] applications.
The remote calibration of measuring instruments is an inter-esting application of these techniques that has not yet been fullyexploited, mainly due to the legal issues involved by the pos-sible lack of security which is intrinsically associated with theremote operations.
However, the capability of calibrating an instrument on-siteinstead of sending it to a calibrating lab, provided the instrumentitself has a standard interface to a PC and a calibrating devicecan be sent to the instrument’s location and operated remotely,allows to save time and money, because of both the lower costof the calibration operation and the reduced time interval duringwhich the instrument is not available [due to the time spent trav-eling back and forth from the calibration lab and waiting for thedevice under test (DUT) to be calibrated].
This approach appears to be particularly effective wheneverthe calibration of low-cost process instruments is involved. Infact, the calibration of these instruments is generally requiredby several quality standards, and is quite expensive, if comparedwith the instrument cost. However, on the other hand, since itdoes not require top-class calibration devices nor strict ambientconditions, it can be performed by using traveling standards.
Manuscript received June 15, 2003; revised April 30, 2004.M. M. Albu and F. Mihai are with the Facultatea de Electrotehnica, Uni-
versitatea Politehnica Bucuresti, 313-77206 Bucuresti, România (e-mail:[email protected]).
A. Ferrero and S. Salicone are with the Dipartimento di Elettrotecnica,Politecnico di Milano, 32-20133 Milano, Italy (e-mail: [email protected]).
Digital Object Identifier 10.1109/TIM.2004.838139
Presently, the interconnection capabilities offered by thecommercial software available for the development of virtualinstruments (VIs) make possible the immediate implementationof a client–server architecture for driving the instrument to becalibrated and the calibrating device remotely. This solution,however, requires installing the software implementing theclient structure on a computing platform at the remote cali-bration site. This involves several security issues, since theinstallation should be done by the staff of the customer who or-dered the calibration, and is not under control of the staff of thecalibration laboratory who will sign the calibration certificate.
II. CALIBRATION SOLUTIONS
From a strict technical point of view, a remote calibration canbe executed with a client–server architecture, where the instru-ment to be calibrated (DUT) and the calibrating device are situ-ated in the same location (though not necessarily on the same in-ternet node) and connected to a client system. The client system,which comprises at least two different client applications, onecorresponding to the DUT and the other one to the calibrator de-vice (CLD) receives the commands from the server, running ona computing platform fully controlled in the calibration labora-tory, and sends them to these devices through the selected inter-face. It scans the instrument reading and transmits it to the serverover the active Internet connection. All operations required toprepare the calibration certificate are performed by the server.Several improvements can be carried out on this basic structure,mainly concerned with self-recognition of the available inter-face and the instrument to be calibrated and with the implemen-tation of security functions to prevent illegal modifications ofthe software running at the client site.
Examples of the client–server architectures for remote cali-bration, carried out in the LabVIEW1 environment, are shownin Figs. 1 and 2.
Despite all possible improvements, this solution requires theinstallation of the client VI at the client’s site. This operationmay not be in total control of the staff of the calibration lab(mainly because sending a person on site would be more expen-sive than sending the instrument to the calibration lab), thus,plugging a possible hole in the security of the whole process,since the client VI can be illegally modified before installing it.
In this technology, the master application has to be launchedfirst, and the client application will then connect to it, usingprevious information on the IP number of the computer unit atthe calibration site.
1http://www.ni.com
0018-9456/$20.00 © 2005 IEEE
![Page 2: [IEEE] Remote Calibration Using Mobile Multiagent Technology](https://reader043.fdocuments.in/reader043/viewer/2022032522/55cf8f37550346703b9a1292/html5/page/2.jpg)
ALBU et al.: REMOTE CALIBRATION USING MOBILE, MULTIAGENT TECHNOLOGY 25
Fig. 1. (a) Master and (b) client front panels for a period-function calibration (DUT: Keithley 2000 multimeter; CLD: Fluke 5500A calibrator).
III. MULTIAGENT TECHNOLOGY
A software agent can be defined [4] as “a software entity thatfunctions continuously and autonomously in a particular envi-ronment, often inhabited by other agents and processes.”
The main characteristics of software agents (they can be mo-bile, communicative, and collaborative) make them appropriatefor current computing environments, which often consist of dis-tributed software running on distributed platforms.
A subset of agent systems is made by the mobile agents whoexhibit, as their main feature, the capability of fault toleranceand recovery. They also can provide distribution software con-trol, distributed repository sharing, and auditing.
Mobile agents are autonomous. They can visit any host in anetwork and this usually requires a procedure to keep track oftheir paths or to locate them.
Most system agents implement a specific access control inorder to address consequences of allowing restricted access toresources controlled by remote third entities. For example, inclient–server architectures, the client applications are enforcingan authorization policy in order to access resources controlledby the servers.
When considering the application of an agent system to as-sist the calibration process on the Internet, the most challengingproblem is the agent intrusion into the remote system as an ex-ecutable code. One has to discriminate the agent activity fromother possible malicious attempts.
Most of the agent systems developed until now are fully im-plemented on Java platforms, which assures the portability, butis an unfriendly environment for measurement tasks.
Considering the special task of instrument communication,the software environment, in which the calibration agent system
![Page 3: [IEEE] Remote Calibration Using Mobile Multiagent Technology](https://reader043.fdocuments.in/reader043/viewer/2022032522/55cf8f37550346703b9a1292/html5/page/3.jpg)
26 IEEE TRANSACTIONS ON INSTRUMENTATION AND MEASUREMENT, VOL. 54, NO. 1, FEBRUARY 2005
Fig. 2. Master front panel for dc-voltage calibration (DUT: Keithley 2000 multimeter; CLD: Fluke 5500A calibrator).
is playing, is drastically limited by the hardware capabilities andthe most suitable environment hosting the instrument drivers.
A platform was developed in LabVIEW, where the variousmodules (executable VIs) can interact in an agent-like mode.These pieces of code are able to:
• monitor remote execution,• interact asynchronously with remote events,• authenticate mutually,• perform self-protection, and• notify the sending host of their failure while executing on
a remote host.In this particular application, the calibration process is com-
pletely localized in time by the acknowledge signal sent aftersetting up the hardware, and therefore, the agent system require-ments related to its protection, integrity, and confidentiality arenot of critical importance. On the contrary, the agent authenti-cation (the code might maliciously send instrument commandsable to destroy the calibrating system) and data security after the“read” process are of crucial importance as long as this step issimply validating the calibration procedure.
IV. CALIBRATION PROTOCOL USING SOFTWARE AGENTS
The solution to the problem of calibration security is to keepthe whole calibration process under control of the server, withall client programs downloaded by the server to the client ina sort of “stealth” way so that no changes can be operated atthe client site. The technology to attain such a result is alreadyavailable, though not yet applied to calibration tasks: the mo-bile, multiagent technology. Papers [5]–[11] address the use ofsoftware agents in order to handle tasks performed by multipleinstruments. Some of the applications [6], [7] are consideringthe Internet as the layer connecting the user, the measurementsystem, and the agent. The increased complexity of the mea-surements involves the collaboration of multiple agents [multia-gent systems (MAS)], as in [10], [11]. Security issues, together
with the universal TCP/IP communication, address the use ofthe mobile-agent technology [5]. The used technologies weredeveloped mainly in a Java environment, as this is providing amaximum transparency over computing platforms.
The most complex and demanding process, in terms of secu-rity, is the calibration validation. Attempts to solve this problemconsidered first the online features of a secure Internet connec-tion for monitoring the calibration procedure [9]. Because theDUT and the calibrator providing traceability for all the requiredfunctions of the DUT have to be physically in the same location,the mobile agent technology appears the most appropriate forthis kind of application [7], [8].
A. Calibration Protocol
We will further consider the calibration protocol for a digitalmultimeter, as complying with the standards in use [12]. Thecalibration procedure will always require an operator at the DUTlocation, as long as the physical connections are subject to dif-ferent layouts in the calibration process. What can be remotelyinitiated and supervised is the actual data collecting and pro-cessing. For example, the calibration of a 4 1/2 digit multimeterinvolves the following steps:
verification of DUT general technical conditions: displayintegrity, isolation resistances, etc.;verification of the reference conditions (temperature, atmo-spheric pressure, humidity, supply voltage amplitude, dis-tortion and frequency, and electromagnetic exterior fields);assessment of the accuracy limits on each measurementfunction;fluctuation at the displayed value at zero-input quantity;andinput resistance measurement.
In either conventional or remote calibration, each of the abovesteps involves human intervention in order to acknowledge the
![Page 4: [IEEE] Remote Calibration Using Mobile Multiagent Technology](https://reader043.fdocuments.in/reader043/viewer/2022032522/55cf8f37550346703b9a1292/html5/page/4.jpg)
ALBU et al.: REMOTE CALIBRATION USING MOBILE, MULTIAGENT TECHNOLOGY 27
physical layout as required by the calibration procedure. A fur-ther improvement can be done with a connector device, whichbasically assures the appropriate connections between the DUTand CLD, in a remote way, and has to be controlled by a com-puter unit. The concordance between the DUT displayed valueand the actual measured one has presently to be proven by ahuman operator, according to the standards in use [12]. Thoughthis could be done, when remote procedures are considered, bya camera surveillance and video broadcast over the Internet, itseems useless, unless DUT display integrity has to be checkedsince both the DUT and CLD are controlled by the same unitthat can easily check the compatibility between the data read onthe DUT and the one sent to the CLD.
In the following, only the third step of the calibration proce-dure will be considered, e.g., the assessment of DUT accuracyon a single function: dc voltage measurement [12]. The calibra-tion algorithm follows the two procedures highlighted below.
1) Limits of error on the base measurement range (with thehighest accuracy or with the highest input resistance).
• on the “ ” polarity:— on each decimal range, five measurement points,
uniformly distributed;— on the upper measurement range limit;— in five distinct measurement points in the vicinity
of the upper measurement range limit and im-plying transitions around the 0-digit (e.g., 07999,08000, 08999, 18999, 19 000).
• on the “ ” polarity:— in three distinct measurement points uniformly
distributed along the measurement range.2) Limits of error on the other measurement ranges:
• on the “ ” polarity only:— in three distinct measurement points in the
vicinity of the upper measurement range limit.
B. Internet-Based Calibration: Architecture Overview
The typical physical layer of a remote calibration process ispresented in Fig. 3. It employs at least one DUT and one CLD,both connected to either a serial or a parallel interface to a re-mote computing unit (RCU) which has either a fixed or mo-bile Internet provider (IP) allocated. METCAL and WEBCALare remote computing units that are connected to the RCU andto each other through the Internet and cooperate in controllingthe remote calibration process. At the customer location, whichis designated to be the actual physical location of the DUTand CLD, at least one human operator (HO) should check thephysical connections between the RCU, DUT, and CLD, beforeeach calibration procedure. This solution was employed for cal-ibrating a Keithley multimeter (DUT) using a Fluke calibrator(CLD) connected via a GPIB interface with a computer unit(RCU), located at Politecnico di Milano. In this case, METCALis an RCU located at the Technical University of Bucharest.
The calibration process is initiated via a web page, hosted byWEBCAL, accessed from anywhere on the web. For practicalreasons, the acknowledgment of correctness of the physical cal-ibration layout has to be initiated from the common location ofthe RCU, CLD, and DUT.
Fig. 3. General physical layer of the remote calibration process.
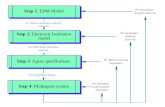
Fig. 4. General structure of the calibration multiagent system (CMAS).
C. A LabVIEW Calibrator Agent System
A novel approach, based on mobile MAS is presented andapplied to the instrument calibration process. Compared to a re-mote laboratory with PC-driven instruments [13], a calibrationapplication will need less effort involved in designing the userinterface since this local-available interface should only be con-fined at the monitoring and alarm level. Fig. 4 presents the gen-eral structure of the agent system developed in the LabVIEW en-vironment for remote calibration on the Internet shown in Fig. 3.The web page hosted by WEBCAL is shown in Fig. 5. The user(usually the HO at the RCU location) initiates the calibrationprocedure activating the link on the calibration web page, men-tioning the IP address of the RCU. This procedure allows thecalibration process to be pursued in a “clean room.” While ac-cessing this link from other than RCU address, a mobile code(A Player) migrates on the RCU machine, detecting the softwareplatform available there. This is necessary in order to commutebetween the LabVIEW codes available for Windows and UnixOS. On the same web page, monitoring information (calibrationstatus, errors, etc.) are available. Regardless the web location ofthe HO, another mobile code (A Identifier) is transferred on theRCU, together with a code pointing to the METCAL address(this address is continuously changed, for security reasons, bythe agent A Manager). Agent A Identifier maintains the com-munication between the METCAL station (under the jurisdic-tion of the Calibration Office) and the equipment connected tothe general purpose interface bus (GPIB) of the RCU located atthe client side. The main task of this Agent is to find the GPIB
![Page 5: [IEEE] Remote Calibration Using Mobile Multiagent Technology](https://reader043.fdocuments.in/reader043/viewer/2022032522/55cf8f37550346703b9a1292/html5/page/5.jpg)
28 IEEE TRANSACTIONS ON INSTRUMENTATION AND MEASUREMENT, VOL. 54, NO. 1, FEBRUARY 2005
Fig. 5. Web page monitoring the calibration process. Agent A Player is initiating the calibration process.
Fig. 6. Diagram of the A Calibrator agent VI.
address of each device (DUT and CLD) connected to RCU andalso to identify the DUT type. This information will allow theselection, on the METCAL station, of the specific calibrationprocedure. The diagram of the A Identifier agent VI is shownin Fig. 6. In this implementation, the Agent can identify onlyequipment having a valid GPIB address. One can observe, from
Fig. 6, that the Agent is testing practically all addresses (from1 to 30) in order to identify those allocated to equipment con-nected to the DUT. It is important to underline that a successfulreport given by A Identifier agent does not ensure the correct-ness of the calibration physical layout. Agent A Identifier sendsstandard SCPI command “*IDN?” in order to identify the type
![Page 6: [IEEE] Remote Calibration Using Mobile Multiagent Technology](https://reader043.fdocuments.in/reader043/viewer/2022032522/55cf8f37550346703b9a1292/html5/page/6.jpg)
ALBU et al.: REMOTE CALIBRATION USING MOBILE, MULTIAGENT TECHNOLOGY 29
Fig. 7. Client application (as seen on a METCAL machine).
of the equipment connected at the GPIB interface. The com-mands sent to both the calibrator and calibrated devices are pro-cessed by a third agent, A Supervisor. This agent (a VI modulesimilar to the server application in Fig. 2, though without a vis-ible user interface) is activated together with an RCU port ad-dress listening to the actual string of the appropriate calibra-tion procedure. This address is simultaneously acknowledgedby A Manager, running on the database server unit. Each mea-surement value is stored into a remote database, preventing themisuse of the RCU. The agent providing data encryption andencoding to the Access-type database is A Manager.
The calibration data are then processed on the METCAL siteusing secure access to the calibration results. A Manager is re-sponsible for ensuring the communication between METCALand the RCU (via the port announced by A Identifier and usedby A Supervisor), and for the calibration monitoring as seen onthe WEBCAL page.
Fig. 7 presents a stage in the calibration process as managedby the LabVIEW agent system.
The front panel in Fig. 7 is for testing purposes only, thoughnot necessary, as long as the calibration result is presented as astandard spreadsheet which manages the measurements storedon the remote database. The most critical step in this processis to assure the concordance between the DUT functions andparameters selected for the calibration procedure and the corre-sponding controlling commands sent to the CLD.
If any doubt arises about the concordance between the CLDand DUT setup, the A Supervisor agent stops the procedure and
requires an acknowledgment from the HO in order to restart theprocess.
From a functional point of view, all above-described agentsbehave and interact like mobile agents [4]–[6]. As far as theirimplementation is concerned, the presently available mobile,multiagent technology is mostly developed in Java, while themodern measurement instruments, based on digital techniques,are mostly developed in LabVIEW. Since LabVIEW is an openenvironment, the above-described agents can be developed inJava and made available to a LabVIEW calibration environment,which is likely to be more familiar to the practitioners in the in-strumentation and measurement field.
On the other hand, object-oriented features can also be easilyadded to LabVIEW so that the mobile agents can be devel-oped in the same environment as the remaining parts of the re-mote calibration system. Moreover, the availability, in the Lab-VIEW libraries, of interfaces to the most popular instrumentsand easy-to-use interfaces to the TCP/IP commands, stronglysuggests to adopt LabVIEW as the development environment,though it has not yet been considered as the natural environmentfor developing the mobile agent technology. The only strict re-quirement, in such an implementation, is that all platforms in-volved in the calibration process need to have installed a Lab-VIEW environment, at least a run-time engine.
V. CONCLUDING REMARKS
Remote calibration is a demanding task both in terms of hard-ware and data security. Due to the various possible locations of
![Page 7: [IEEE] Remote Calibration Using Mobile Multiagent Technology](https://reader043.fdocuments.in/reader043/viewer/2022032522/55cf8f37550346703b9a1292/html5/page/7.jpg)
30 IEEE TRANSACTIONS ON INSTRUMENTATION AND MEASUREMENT, VOL. 54, NO. 1, FEBRUARY 2005
the devices that have to be periodically calibrated, using a spe-cial communication layer for this task only would be unreal-istic. Instead, the Internet layer can be used, but only with ad-ditional checking of the data integrity. Due to the wide range ofinstrument types and their command library, an agent system be-comes a competitive solution. In this paper, a LabVIEW imple-mentation of a calibrating agent system is proposed. Tests havebeen performed with a calibration setup in Politecnico di Milanoand the calibrating entity at Technical University of Bucharest.The preliminary results show the effectiveness of this methodand will be used as a reference for the next developments, on asoftware environment that will be fully independent of the em-ployed platform.
REFERENCES
[1] L. Benetazzo, M. Bertocco, F. Ferraris, A. Ferrero, C. Offelli, M. Parvis,and V. Piuri, “A web-based distributed virtual laboratory,” IEEE Trans.Instrum. Meas., vol. 49, pp. 349–356, Apr. 2000.
[2] M. Bertocco, F. Ferraris, C. Offelli, and M. Parvis, “A client–server ar-chitecture for distributed measurement systems,” IEEE Trans. Instrum.Meas., vol. 47, pp. 1143–1148, Oct. 1998.
[3] L. Cristaldi, A. Ferrero, and S. Salicone, “A distributed system for elec-tric power quality measurement,” IEEE Trans. Instrum. Meas., vol. 51,pp. 776–781, Aug. 2002.
[4] J. M. Bradshaw, An Introduction to Software Agents. Cambridge, MA:MIT Press, 1997, pp. 3–46.
[5] G. Fortino, D. Grimaldi, and L. Nigro, “Multicast control of mobile mea-surement systems,” IEEE Trans. Instrum. Meas., vol. 47, pp. 1149–1154,Oct. 1998.
[6] , “An agent-based measurement laboratory over internet,” in Proc.IEEE AUTOTESTCON, 1999, pp. 61–66.
[7] R. A. Dudley and N. M. Ridler, “Internet calibration direct to nationalmeasurement standards for automatic network analyzers,” in Proc. IEEEIMTC, vol. 1, 2001, pp. 255–258.
[8] A. Carullo, M. Parvis, and A. Vallan, “Security issues for internet-basedcalibration activities,” in Proc. IEEE IMTC, vol. 1, 2002, pp. 817–822.
[9] N. Oldham and M. Parker, “Internet-based test service for multifunctioncalibrators,” in Proc. IEEE IMTC, vol. 3, 1999, pp. 1485–1487.
[10] X. Luo, D. Liu, D. Ye, R. Che, and C. Cui, “Multi-agent based distributedmeasurement systems in CORBA environment,” in Proc. IEEE IMTC,vol. 2, 2001, pp. 821–826.
[11] Z. Papp and H. J. Hoeve, “A multiagent based modeling and execu-tion framework for complex simulation, control and measuring tasks,”in Proc. IEEE IMTC, vol. 3, 2000, pp. 1561–1566.
[12] Metrological Verification for Multimeters (Norma tehnica de MetrologieNTM4-16-90: Verificarea metrologica a aparatelor electronice cuafisare numerica (digitale) pentru masurat tensiuni, curenti, rezistentein curent continuu (multimeter digitale), in Romanian), RomanianStandardization Committee, 1993. Ed. Tehnica.
[13] K. Holbert and M. Albu, “A signal processing laboratory employingon-line teaming for remote experiments,” in Proc. American Soc. Eng.Education Ann. Conf. Expo. Nashville, TN, June 2003.
Mihaela M. Albu (M’96) was born in Craiova,Romania. She received the Ph.D. degree from theUniversitatea Politehnica Bucuresti, Bucharest,Romania.
She is presently a Professor of Electrical En-gineering at Universitatea Politehnica Bucurestiy.Her research interests include power quality, in-strumentation, and remote experimentation. During2002–2003, she was on leave at Arizona StateUniversity as a Fulbright Fellow.
Alessandro Ferrero (M’88–SM’96–F’99) was bornin Milan, Italy, in 1954. He received the M.Sc. degreein electrical engineering from the Politecnico di Mi-lano, Milan, in 1978.
In 1983, he joined the Dipartimento di Elettrotec-nica, Politecnico di Milano, as an Assistant Professorof Electrical Measurements. From 1987 to 1991,he was Associate Professor of Measurements OnElectrical Machines and Plants at the University ofCatania, Catania, Italy. From 1991 to 1994, he wasAssociate Professor of Electrical Measurements at
the Dipartimento di Elettrotecnica of the Politecnico di Milano. Since 1994, hehas been Full Professor of Electrical And Electronic Measurements at the samedepartment. His current research interests are concerned with the applicationof digital methods to electrical measurements and measurements on electricpower systems under nonsinusoidal conditions.
Prof. Ferrero is a member of AEI (the Italian Association of Electrical andElectronic Engineers), ANIPLA (the Italian Association for Industrial Automa-tion), he is Chair of the Italian Association on Electrical and Electronic Mea-surements, and he is member of the AdCom of the IEEE Instrumentation andMeasurement Society.
Florin Mihai (M’02) was born in Ploiesti, Romania.He received the M.Sc. degree in electrical engi-neering from the Universitatea Politehnica Bucuresti,Bucharest, Romania, where he is currently pursuingthe Ph.D. degree.
His current research interests are concerned withremote experimentation and database applications.
Simona Salicone (S’01) was born in Milan, Italy. Shereceived the M.Sc. and Ph.D. degrees in electrical en-gineering from the Politecnico di Milano, Milan, in2000 and 2004, respectively.
In 2000, she joined the Dipartimento di Elettrotec-nica of the Politecnico di Milano as a part-time re-searcher on a research project aimed at the metro-logical characterization of complex, distributed mea-surement systems In 2004, she became a full-time re-searcher in the same department.
Ms. Salicone is a member of the Italian Associa-tion on Electrical and Electronic Measurements.