[IEEE 2014 American Control Conference - ACC 2014 - Portland, OR, USA (2014.6.4-2014.6.6)] 2014...
6
Click here to load reader
Transcript of [IEEE 2014 American Control Conference - ACC 2014 - Portland, OR, USA (2014.6.4-2014.6.6)] 2014...
![Page 1: [IEEE 2014 American Control Conference - ACC 2014 - Portland, OR, USA (2014.6.4-2014.6.6)] 2014 American Control Conference - Predictive HVAC control using a Markov occupancy model](https://reader038.fdocuments.in/reader038/viewer/2022100721/5750ac081a28abcf0ce3f5b1/html5/thumbnails/1.jpg)
Predictive HVAC Control Using a Markov Occupancy ModelJustin R. Dobbs and Brandon M. Hencey, Member, IEEE
Abstract— This paper presents a model predictive control(MPC) technique for building heating, ventilation, and airconditioning (HVAC) systems. It incorporates the building’sthermal dynamics, local weather predictions, and a stochasticoccupancy model to reduce energy consumption while maintain-ing occupant comfort. Using approximate dynamic program-ming and a cost function weighted by expected occupancy, thescheme extends the capability of conventional model predictivecontrol by pre-conditioning thermal zones before occupancybegins and reducing conditioning before occupancy ends. Theresulting control law may be synthesized step-wise using anon-line optimization or may be periodically synthesized off-line and downloaded into an embedded controller. Simulationresults demonstrate the efficacy of both approaches.
I. INTRODUCTION
Increasing energy prices have driven interest in demand-based HVAC control using schedules and occupancy trigger-ing, but these approaches have significant drawbacks. Sched-ules, while simple to implement, become outdated unlessthey receive ongoing adjustment; any mismatch between theschedule and actual occupancy either wastes energy or cre-ates uncomfortable conditions. Occupancy-reactive controlreduces energy consumption compared to fixed schedules,but building thermal lag results in uncomfortable conditionsfor early occupants. Moreover, waiting for occupants to leavebefore turning the system off wastes valuable stored energyin the building’s thermal mass. Occupancy predictive controlfills the performance gap between reactive and scheduledcontrol by both reacting to and anticipating transitions inoccupancy.
Considerable research effort has been directed towardsophisticated occupancy models for control and simulation.Improvements to real-time detection have focused on synthe-sizing more accurate measurements from a plurality of sensortypes using probabilistic, neural, and sensor-utility networks[1], [2], [3]. Agent-based models and Markov chains havebeen used to predict movement between rooms [4], [5], [6].The simpler Page model considered the occupancy of a singlezone under a time-heterogeneous two-state Markov chain [6],although that model was used for simulation rather than forcontrol.
Aside from the Page model, the above efforts have founduse in heuristic algorithms that adjust set points accordingto ASHRAE standards [7] or in model predictive control
J. Dobbs is with the Sibley School of Mechanical and AerospaceEngineering, Cornell University, Ithaca, NY 14853 USA (e-mail:[email protected]).
B. Hencey is with the Sibley School of Mechanical and AerospaceEngineering, Cornell University, Ithaca, NY 14853 USA (e-mail:[email protected]).
schemes [8], but their energy saving potential is hinderedby high implementation cost. For instance, researchers haverelied on manually-generated models that require extensivetime and expertise to produce [8], [9], [10]. We insteademploy an automated BIM translator outlined in a previouspaper [11]. Furthermore, the trend toward greater complexityand plurality of adjustments—system topologies, controlgains, and detection thresholds—has resulted in “one-off”engineering efforts with favorable performance but without aclear path to widespread use. The system in [8], for example,uses CO2, sound, and light sensors that require carefully setdetection thresholds for each room, plus an internal weatherforecasting algorithm in lieu of commonly available on-lineforecasts. A controller that is synthesized quickly, can betuned easily, and performs effectively with low-cost sensorsis more likely to be implemented than current alternatives.
This paper presents a simple way to integrate occupancyprediction with conventional MPC for zone-level control.In contrast to chance-constrained or economic MPC, ourapproach applies the occupancy predictions directly to theMPC cost function. The Markov occupancy model is un-conventional in that its states track length of occupancy andvacancy instead time-of-day, although other chain topologiesare possible. This work is an early step toward makingadvanced building control accessible to smaller buildingswhere custom on-line controls are too expensive.
The outline of this paper is as follows. First, we discussthe problem formulation. Second, we discuss the stochasticmodel predictive controller in two formats, one synthesizedoff-line and downloaded into the controller in advance, theother solved on-line for slightly better performance. Weconclude with a comparison of both approaches againstan automatically-generated thermal model of a single-zonebuilding.
II. PROBLEM FORMULATION
We wish to minimize total energy use of a building heating(or cooling) system while maintaining occupant comfort.Over conventional occupancy-reactive control, we want to• boost comfort at the beginning of occupancy,• cut energy waste before occupancy, and• exploit stored thermal energy as much as possible.
Our approach is standard MPC using a cost functionweighted by expected occupancy. The occupancy predictionis drawn from a Markov chain that, in practice, can be traineddirectly from sensor data.1 We present two use cases:
1In this paper we do not cover training but instead use a manually-tunedmodel. On-line occupancy model training will be detailed in future work.
2014 American Control Conference (ACC)June 4-6, 2014. Portland, Oregon, USA
978-1-4799-3274-0/$31.00 ©2014 AACC 1057
![Page 2: [IEEE 2014 American Control Conference - ACC 2014 - Portland, OR, USA (2014.6.4-2014.6.6)] 2014 American Control Conference - Predictive HVAC control using a Markov occupancy model](https://reader038.fdocuments.in/reader038/viewer/2022100721/5750ac081a28abcf0ce3f5b1/html5/thumbnails/2.jpg)
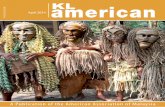
State Observer
Temperature
Current Occupancy
Predicted Occupancy
HVAC
BIM Weather
Zone
Markov Model
MPC Synthesis
Thermal Network
Fig. 1. Proposed system architecture. The building model is translatedautomatically to a linear, time-invariant thermal network that encompassesthe dominant thermal processes.
• a control law synthesized and downloaded into thecontroller each day and
• on-line synthesis, where the optimization is repeated ateach time step.
We assume we have available• an occupancy model encompassing typical usage pat-
terns,• a model of the dominant thermal dynamics,• an accurate weather forecast, and• continuously-variable HVAC effort.
The thermal model is translated directly from CAD geometryusing a materials database; the result has been shown inearlier work to closely mirror EnergyPlus simulation results[12]. The use of weather predictions, readily available fromon-line sources [13], means that the off-line control lawmust be periodically refreshed. To simplify the presentation,we assume an HVAC system with a single actuator andconstant efficiency over the time horizon. We also assumethat either heating mode or cooling mode is used, butnot both simultaneously. These simplifications reduce thecomplexity of the cost function, but scenarios with multipleactuators and correspondingly elaborate cost functions havebeen addressed in the literature [14], [9], [10]. We nowdiscuss each component in detail before using them for MPC.
A. Occupancy Model
The occupancy model is based on the two-state PageMarkov chain [6] but rolls time into the state space so thatit is mathematically time-homogeneous. For this paper weassume the space is typically occupied for a consistent periodof time with direct dependence on time of day.2 The topology(Fig. 2) contains two groups of states:• O0...m for occupied for 0 . . .m hours, and• U0...n for unoccupied for 0 . . .n hours,
where we have chosen n = 7 and m = 17. Once the zonehas been occupied for at least n hours or unoccupied for at
2Time-of-day alignment can be forced by resetting the controller at adesignated time each morning.
O0 O1 O2 On
U0 U1 U2 Um
Fig. 2. Markov occupancy model structure. The initial transitions areomitted.
least m hours, an occupancy status change is considered verylikely, so we terminate the Oi and Ui sequences with self-transitions to accommodate periods that extend past n or mhours. We remark that the particular chain topology chosenfor this study is not central to this paper’s contribution; manytopologies will work with MPC. For example, one may wishto add a special sequence of states to accommodate lunchhours, meeting patterns in the afternoon, etc. In practicethe controller may switch to conventional occupancy-reactiveor scheduled control over weekends and may use differentMarkov chains for each weekday. The raw input to theoccupancy model is an asynchronous series of pulses fromone or more PIR sensors. With a suitable heuristic, thesepulses are mapped to boolean observations at a fixed timeinterval. The Markov model tracks the occupancy readingssuch that the state γ ∈ {O0, . . . ,On,U0, . . . ,Um} is directlyobserved.
Every hour we wish to predict occupancy j ≤ N−1 stepsinto the future, where N is the control horizon. To make thisprediction, we need the transition probabilities contained inthe four-block stochastic matrix
P =
[PO→O
n×n PO→Un×m
PU→Om×n PU→U
m×m
], (1)
where PO→O contains transitions from occupied states toother occupied states, PU→U the unoccupied-to-unoccupiedtransitions, etc. The Markov chain topology determineswhich entries of P may have nonzero probabilities. Our Pmatrix contains hand-chosen values, but in practice the ma-trix may be derived by counting transitions from occupancydata or by using on-line Bayesian inference. The current stateγk has a probability distribution expressed by the row vector
π(γk) =
[1i
1×n 01×m
]γk = Oi[
01×n 1i1×m
]γk =Ui
(2)
where 1i is a row vector of zeros with the ith element set toone. Future state probability distributions are predicted using
πk+ j = πkP j. (3)
Later in the paper we will use the Markov state to selectivelypenalize discomfort. To that end, we introduce the following
1058
![Page 3: [IEEE 2014 American Control Conference - ACC 2014 - Portland, OR, USA (2014.6.4-2014.6.6)] 2014 American Control Conference - Predictive HVAC control using a Markov occupancy model](https://reader038.fdocuments.in/reader038/viewer/2022100721/5750ac081a28abcf0ce3f5b1/html5/thumbnails/3.jpg)
Fig. 3. The Sustain modeling and simulation environment. (New YorkTimes building shown.)
function that maps all the occupied states to one and all theunoccupied states to zero:
h(γ) =
{1 γ ∈ {O0, . . . ,On},0 otherwise.
(4)
To obtain the future probability of being in any occupiedstate, we then use
E[h(γk+ j) | γk
]= γkP j
[1n×10m×1
]∈ [0,1], (5)
where 1n×1 maps the Ox states to 1 and 0m×1 maps the Uxstates to zero.
B. Building Thermal Model
Thermal model accuracy strongly influences MPC per-formance, so we want a model that closely approximatesthe building’s dominant processes. Generating building ther-mal models has historically been a tedious and expensivemanual process, but we have automated the conversionusing software called Sustain developed at Cornell University(Fig. 3) [12], [11]. Embedded thermal mass temperaturessuch as inner wall layers and concrete slabs are includedin the model. Although installing sensors into wall layersis an unlikely proposition, the zone temperature and theambient conditions are easily measured, and the model ismathematically observable by construction. Therefore, witha suitable state observer, the RC model can be used as-is forcontrol synthesis and operation. Model reduction techniquescan be applied to improve speed [15].
The building under consideration has a single thermal zoneand 40 other states. Well-mixed air and constant convectioncoefficients are assumed. Radiant exchange is rolled intothe heat transfer coefficients, which match those used byEnergyPlus’ Simple and SimpleCombined convectionalgorithms [16].3 The model accepts the following inputs:• outside air temperature,
3EnergyPlus changes convection coefficients depending on the tempera-ture gradient through walls, while the RC network uses fixed coefficientsbased on expected temperatures. The RC network can, however, be regen-erated at any time using up-to-date coefficients.
• ground temperature, and• heat injected into the interior zone.
The state equation of the building is
xk+1 = Axk +Bwwk +Buuk, (6)
where x is the complete temperature state vector containingthe zone temperature xzone. The vector wk is the weatherforecast, described below, and uk is heat injected into theroom by the HVAC system. The initial state x0 is found byan extended “warm-up” simulation.
C. Weather Forecast
The sequence L = {wk,wk+1, . . . ,wk+N−1} contains theambient and ground temperature forecasts. We assume it isaccurate4 so that we can incorporate it into the state-spacemodel using the shift-register system
φk+1 = Y φk φ0 =[1 0 · · · 0
]>︸ ︷︷ ︸N×1
, (7)
where Y ∈ RN×N is the shift register transition matrix. Theweather j steps in the future is then
wk+ j =[wk · · · wk+N−1
]︸ ︷︷ ︸L2×N
φk+ j, (8)
where φ is the shift-register state. For offline usage, L needsto contain the entire weather forecast over the operatingperiod plus the horizon (N = 24 + N − 1 if the controlleris synthesized once per day, for example). For on-line opti-mization, L needs only to be as long as the horizon (N = N)and can be refreshed at each time step. Note that any timeL is changed, the shift register state φ is reset to φ0.
D. Combined State Space Model
The occupancy model, building dynamics, weather fore-cast, and energy accounting can be merged into a singlestate space model because they are all deterministic. Thecomfort temperature, or occupied setpoint, is contained in anon-changing state τ . The state space model isxk+1
τk+1φk+1
︸ ︷︷ ︸
xk+1
=
A 0 BwL0 1 00 0 Y
︸ ︷︷ ︸
A
xkτkφk
︸ ︷︷ ︸
xk
+
Bu00
︸ ︷︷ ︸
B
uk,(9)
where the vector x contains the building’s thermal state, τ isthe reference temperature, and φ is the weather shift register.The augmented state space simplifies the reference trackingproblem into a regulation problem.
4If desired, weather uncertainty data can be figured into the MPC costfunction to improve performance [9].
1059
![Page 4: [IEEE 2014 American Control Conference - ACC 2014 - Portland, OR, USA (2014.6.4-2014.6.6)] 2014 American Control Conference - Predictive HVAC control using a Markov occupancy model](https://reader038.fdocuments.in/reader038/viewer/2022100721/5750ac081a28abcf0ce3f5b1/html5/thumbnails/4.jpg)
III. POLICY FORMULATION
We wish to balance competing demands for occupantcomfort and low total energy consumption by reducingspace conditioning during vacancy. The optimal control lawsatisfies
u∗k(xk,γk) = argminu
E
[N−1
∑j=0
g(xk+ j,uk+ j,γk+ j)
], (10)
where g is the stage cost. The expectation operator is neededbecause all future steps require occupancy prediction. Thelarge number of occupancy state trajectories (Fig. 2) makesfinding the closed-form solution computationally intensive.A simpler sub-optimal controller bases all occupancy pre-dictions on immediate knowledge, i.e.
u∗k(xk,γk)≈ argminu
N−1
∑j=0
g(xk+ j,uk+ j,E
[γk+ j | γk
]). (11)
The solution depends on the stage cost g(x,u,γ). We now dis-cuss two possible forms of g. The first uses a fully quadraticcost and admits a simple closed-form solution parameterizedon x. The second form yields better performance but isapproached as an on-line optimization due to the complexityof its analytical solution.
A. Method I: Off-line Quadratic Cost MPC
Using a quadratic cost function and approximate dynamicprogramming, we can obtain a sub-optimal policy (Eq. 11)that is amenable to off-line computation. Let V ∗k (xk,γk) bethe optimal value function (cost from a particular step), withV ∗k+N = 0 to terminate the recursion.
V ∗k+N(xk+N) = 0V ∗k (xk,γk) = g(xk,γk,uk)
+ E[V ∗k+1(Axk + Buk,γk+1) | γk
].
(12)
The cost function g penalizes deviation from the comfortreference temperature τ when the room is occupied andpenalizes instantaneous energy consumption at all times, i.e.
g(x,γ,u) = x>Q(γ)x+ ru2
= βh(γ)(xzone− τ)2 + ru2,(13)
where
• x is the augmented system state from Eq. 9,• γ is the occupancy observation,• τ is the comfort reference temperature,• Q(γ) is a matrix that extracts (xzone−τ)2 from the state
and scales it by h(γ),• h(γ) maps occupancy to cost weight as given in Eq. 5,• r is the penalty on the instantaneous control action, and• β is the penalty on discomfort during occupancy.
The optimal costs for the last steps are
V ∗k+N(xk+N ,γ) = 0V ∗k+N−1(xk+N−1,γk+N−1)
= x>k+N−1Q(γk+N−1)xk+N−1 + ru2k+N−1
+E[V ∗k+N(Axk+N−1 + Buk+N−1,γk+N)
]= x>k+N−1Q(γk+N−1)xk+N−1+
minu
{ru2
k+N−1 +(Axk+N−1 + Buk+N−1)>×
E [Q(γk+N) | γk+N−1] (Axk+N−1 + Buk+N−1)}.
(14)
If no constraints are needed on u, we can use the analyticalminimum by setting ∂
∂uV ∗k+N−1 = 0 to obtain the standardLQR result
u∗k+N−1(xk+N−1,γk+N−1)
=−[(r+ B>Q(γk+N−1)B)−1B>Q(γk+N−1)A
]xk+N−1
=−Kk+N−1xk+N−1
V ∗k+N−1(xk+N−1,γk+N−1)
≈ x>[Q(γk+N−1)+ A>Q(γk+N)×(
I− BB>(r+ B>Q(γk+N)B)−1Q(γk+N))
A]xk+N−1
= xTk+N−1Φk+N−1(γk+N−1)xk+N−1.
(15)The standard Riccatti result for the first recursive step is
Φk+N = 0Φk+N−1(γk+N−1)
= Q(γk)+ A>Φk+NE [γk+N | γk+N−1]×[I− (r+ B>Φk+NE [γk+N | γk+N−1] B)−1×
BB>Φk+NE [γk+N | γk+N−1]]A
u∗k+N−1(xk+N−1,γk+N−1)
=−[(r+ B>Φk+N−1B)−1B>Φk+N−1A
]︸ ︷︷ ︸
Kk+N−1
xk+N−1.
(16)
Note, however, that the computational difficulty of this prob-lem compounds rapidly with additional backward recursion,because each Markov state has two possible outgoing tran-sitions. Conditioning all predictions solely on the occupancyat the base step k gives the suboptimal law
Φk+N = 0
Φ j(γk) = Q(γk)+ A>Φ j+1E[γ j+1 | γk
]×[
I− (r+ B>Φ j+1E[γ j+1 | γk
]B)−1BB>×
Φ j+1E[γ j+1 | γk
]]A
uk(xk,γk) =−[(r+ B>Φk(γk)B)−1B>Φk(γk)A
]︸ ︷︷ ︸
K(γk)
xk.
(17)We emphasize that the above recursion conditions all pre-dictions on the immediately known occupancy γk. Because
1060
![Page 5: [IEEE 2014 American Control Conference - ACC 2014 - Portland, OR, USA (2014.6.4-2014.6.6)] 2014 American Control Conference - Predictive HVAC control using a Markov occupancy model](https://reader038.fdocuments.in/reader038/viewer/2022100721/5750ac081a28abcf0ce3f5b1/html5/thumbnails/5.jpg)
uk accepts the combined thermal and weather state xk, wecan compute it in advance. We must compute K(γ) forall possible Markov states γ , but the Markov chain statespace is countably finite; with m+ n states, we need onlycompute N× (m+n) control laws that are easily stored in alookup table. (Recall that N is the length of time the off-linesynthesized controller runs before it is refreshed.)
The above scheme balances occupant comfort against the2-norm (sum of squares) of energy consumption instead ofthe direct sum of energy consumption. This causes peaks tobe suppressed and effort to be spread over time, inhibitingfull HVAC shutdown during vacancy. The following mixed-norm formulation yields stronger performance and is ap-proached via on-line optimization.
B. Method II: On-line Mixed-Norm MPC
Better energy-saving performance may be attained byminimizing the running sum (1-norm) of expected energyusage, in which case the stage cost becomes
g(x,γ,u) = x>Q(γ)x+ r |u|= βh(γ)(xzone− τ)2 + r |u| ,
(18)
resulting in the sequence of control outputs
uk = argminu
{N−1
∑j=0
x>k+ jE[Q(γk+ j) | γk
]xk+ j + r
∣∣uk+ j∣∣}
= argminu
{N−1
∑j=0
E[h(γk+ j) | γk
](xzone
k+ j − τ)2 + r∣∣uk+ j
∣∣} .
(19)The above controller more readily stops the system duringvacancy than the quadratic controller because it lacks thepeak-suppression effect. Rather than generating a law param-eterized by the state x as in Eq. 17, we use the immediatestate xk to compute a sequence of control values conditionedon the current Markov state γk. The controller applies thefirst value of that sequence, discards the rest, and repeats theoptimization at the next step.
Because the optimization spans N time steps, it helps tovectorize the problem as in Eq. 3.8 of [17]. The state xkis known and future states xk+1...k+N are computed by thesolver using the decision vector uk:
xk+1 =
0B 0
AB B. . .
...... 0
AN−1B AN−2B · · · B 0
︸ ︷︷ ︸
G
uk +
IAA2
...AN
︸ ︷︷ ︸
H
xk
xk =[x>k · · · x>k+N
]> uk =[uk · · · uk+N−1
]>(20)
The optimization is
minuk···uk+N−1
N−1
∑j=0
{x>j+kE
[Γ j+k | Γk
]Qx j+k +
∣∣u j+k∣∣}
= (Guk +Hxk)>Q(Guk +Hxk)+ r‖uk‖1
subject to 0≤ uk ≤ umax
(21)
where Q = diag{Q(γk) , . . . ,Q(E [γk+N−1 | γk]) ,0}. The dis-comfort penalty β is embedded in Q as before, and r ∈ R isthe actuation penalty.
IV. RESULTS
Simulation results from both approaches (Fig. 4) demon-strate significant energy savings over the baseline constant-temperature regulator. Both algorithms have been simulatedagainst the single-zone model (Sec. II-B) under the followingconditions:• Elmira, NY EnergyPlus weather data for May 1 (typical
meteorological year),• Initial Markov state: previously vacant for 9 hours (U9),• Occupancy pattern: vacant for 5h, occupied for 7h,
vacant for 10h, occupied for 6h, vacant for 13h,• Tuning parameters chosen to observe u≤ umax = 10kW.
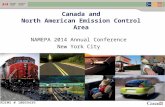
The Markov model has been manually tuned for increasingoccupancy probability after 14 hours of vacancy with ahigh probability of continuing occupancy for seven hours.Figure 4a shows good occupancy prediction over most ofthe run. The second occupancy period at hour 22 hasbeen deliberately placed two hours earlier than expected toshow the response to an incorrect prediction: the systemswitches on after receiving the occupancy signal similarlyto a conventional reactive controller. The temperature re-sponse in Fig. 4b shows that both algorithms preheat thebuilding before occupancy (hours 0–5) while allowing thetemperature to drop just before vacancy (hours 12, 29). Thetarget temperature of 23°C is never reached because the costfunction balances discomfort against energy usage instead ofregulating to zero steady-state error.
As expected, penalizing u2k under off-line stochastic-cost
quadratic MPC suppresses peaks and spreads the controlaction; this causes nonzero quiescent power that erodesenergy savings from hours 15–20 and 31–37. This policysaves 37% relative to the baseline. The choice of ‖u‖1under on-line stochastic-cost mixed-norm MPC allows thecontroller to switch the system completely off when the zoneis expected to be vacant, thus enabling a robust 44% savingscompared to the baseline. We remark that, when a closed-form solution is not required, the on-line approach makesadding constraints—such as on control effort or temperatureexcursion—very straightforward.
V. CONCLUSION
We have proposed two similar formulations of MPC toreduce HVAC energy consumption using both occupancysensing and prediction. The first method, off-line stochastic-cost quadratic MPC, admits a familiar analytical solution
1061
![Page 6: [IEEE 2014 American Control Conference - ACC 2014 - Portland, OR, USA (2014.6.4-2014.6.6)] 2014 American Control Conference - Predictive HVAC control using a Markov occupancy model](https://reader038.fdocuments.in/reader038/viewer/2022100721/5750ac081a28abcf0ce3f5b1/html5/thumbnails/6.jpg)
5 10 15 20 25 30 35 400
2
4
6
8
10
Contr
ol
eff
ort
(kW
)
5 10 15 20 25 30 35 400
50
100
150
200
250
Tota
l energ
y (
kW
h)
Simulation hours
5 10 15 20 25 30 35 40ï10
0
10
20
30
Tem
pera
ture
(°C
)
Baseline
Method I
Method II
Ambient
5 10 15 20 25 30 35 40
0
0.5
1O
ccupancy
Occupancy
1h pred.
2h pred.
(a)
(b)
(c)
(d)
Fig. 4. Simulation results: actual versus predicted occupancy (a), tem-perature response and weather (b), instantaneous control effort (c), andcumulative energy consumption (d).
resulting in a control gain table that can be downloadedinto an embedded controller periodically. The second for-mulation, on-line stochastic-cost mixed-norm MPC, requiresa sufficiently fast computer but offers stronger energy savingperformance and flexibility.
We have made several simplifications for clarity. First, wehave focused on the integration of the occupancy model withMPC but have not described how such a model might bederived in practice. Second, we have used both the occupancymodel and the MPC on the same one-hour time intervalwhich, while perhaps adequate for occupancy prediction, ismuch too long for disturbance rejection. Finally, we haveassumed that the weather forecast is accurate with the remarkthat uncertainty data can be included in the cost function.These considerations are left for future work.
REFERENCES
[1] K. P. Lam, M. Höynck, B. Dong, B. Andrews, Y. Chiou, R. Zhang,D. Benitez, J. Choi, et al., “Occupancy detection through an extensiveenvironmental sensor network in an open-plan office building,” IBPSABuilding Simulation, pp. 1452–1459, 2009.
[2] R. H. Dodier, G. P. Henze, D. K. Tiller, and X. Guo, “Buildingoccupancy detection through sensor belief networks,” Energy andbuildings, vol. 38, no. 9, pp. 1033–1043, 2006.
[3] S. Meyn, A. Surana, Y. Lin, S. M. Oggianu, S. Narayanan, and T. A.Frewen, “A sensor-utility-network method for estimation of occupancyin buildings,” in Decision and Control, 2009 held jointly with the 200928th Chinese Control Conference. CDC/CCC 2009. Proceedings of the48th IEEE Conference on, pp. 1494–1500, IEEE, 2009.
[4] C. Liao, Y. Lin, and P. Barooah, “Agent-based and graphical modellingof building occupancy,” Journal of Building Performance Simulation,vol. 5, no. 1, pp. 5–25, 2012.
[5] V. L. Erickson and A. E. Cerpa, “Occupancy based demand responseHVAC control strategy,” in Proceedings of the Second ACM Workshopon Embedded Sensing Systems for Energy-Efficiency in Buildings,pp. 7–12, ACM, 2010.
[6] J. Page, D. Robinson, N. Morel, and J.-L. Scartezzini, “A generalisedstochastic model for the simulation of occupant presence,” Energy andBuildings, vol. 40, no. 2, pp. 83–98, 2008.
[7] V. L. Erickson, M. Á. Carreira-Perpiñán, and A. E. Cerpa, “Observe:Occupancy-based system for efficient reduction of hvac energy,”in Information Processing in Sensor Networks (IPSN), 2011 10thInternational Conference on, pp. 258–269, IEEE, 2011.
[8] B. Dong and K. P. Lam, “A real-time model predictive controlfor building heating and cooling systems based on the occupancybehavior pattern detection and local weather forecasting,” in BuildingSimulation, vol. 7, pp. 89–106, Springer, 2014.
[9] F. Oldewurtel, A. Parisio, C. N. Jones, D. Gyalistras, M. Gwerder,V. Stauch, B. Lehmann, and M. Morari, “Use of model predictivecontrol and weather forecasts for energy efficient building climatecontrol,” Energy and Buildings, vol. 45, no. 0, pp. 15 – 27, 2012.
[10] S. Goyal, H. A. Ingley, and P. Barooah, “Occupancy-based zone-climate control for energy-efficient buildings: Complexity vs. perfor-mance,” Applied Energy, vol. 106, pp. 209–221, 2013.
[11] D. Greenberg, K. Pratt, B. Hencey, N. Jones, L. Schumann, J. Dobbs,Z. Dong, D. Bosworth, and B. Walter, “Sustain: An experimental testbed for building energy simulation,” Energy and Buildings, vol. 58,pp. 44 – 57, 2013.
[12] J. R. Dobbs and B. M. Hencey, “Automatic model reduction inarchitecture: a window into building thermal structure,” in Proceedingsof the SimBuild, 5th National Conference of IBPSA-USA, Madison, WI,IBPSA, 2012.
[13] National Climactic Data Center, “U.S. surface climate observ-ing reference network.” https://www.ncdc.noaa.gov/crn/qcdatasets.html, February 2014.
[14] P. Haves, B. Hencey, F. Borrell, J. Elliot, Y. Ma, B. Coffey, S. Bengea,and M. Wetter, “Model predictive control of HVAC systems: Im-plementation and testing at the University of California, Merced,”tech. rep., Ernest Orlando Lawrence Berkeley National Laboratory,Berkeley, CA (US), 2010.
[15] J. R. Dobbs and B. M. Hencey, “A comparison of thermal zoneaggregation methods,” in 51st IEEE Conference on Decision andControl, vol. 1, pp. 6938–6944, IEEE, 2012.
[16] United States Department of Energy, EnergyPlus Engineering Docu-ment: The Reference to EnergyPlus Calculations. University of Illinoisand University of California, 2011.
[17] J. A. Rossiter, Model-based predictive control: a practical approach,ch. 3.2. Boca Raton: CRC press, 2003.
[18] A. Bemporad, M. Morari, V. Dua, and E. N. Pistikopoulos, “The ex-plicit linear quadratic regulator for constrained systems,” Automatica,vol. 38, no. 1, pp. 3–20, 2002.
[19] D. P. Bertsekas, Dynamic Programming and Optimal Control. AthenaScientific, 2nd ed., 2000.
1062