[IEEE 2007 Compatibility in Power Electronics - Gdansk, Poland (2007.05.29-2007.06.1)] 2007...
4
Characteristics of the Synchronous Motors Determination by Results of Mathematical Simulation of a Magnetic Field Andrejs Podgornovs and Andrejs Zviedris Abstract - Static excitation system of synchronous motor by using the compounding principle is considered in this work. The magnetic induction distribution of salient pole synchronous machine is nonsinusoidal in air gap and from the higher harmonics of a magnetic field the most expressed is the third harmonic. Therefore the auxiliary winding can be placed in armature of a machine to use the third harmonic energy of a magnetic field. The main development principles of the above-mentioned excitation system based on the analysis of main parameters of armature windings in synchronous machines are surveyed in this work. There has been worked out the methodology for determination of self-excitation system characteristics using magnetic field calculation by the finite element method, which enables to get particular magnetic field nature. Index Terms - compounding, magnetic field, self-excitation, synchronous machine, the third harmonic. Synchronous motors in comparison this induction motors have more important advantages, there are operation with cosp= 1, and in the overexcitation mode can donate reactive power back to the power supply system to grow up system power factor, to reduce voltage falling down and power losses as a result. These advantages of the synchronous motors can ensure with excitation systems, which are provided automatic regulation. This excitation system must ensure sufficient operation speed, must be reliable and operate till a resort of a compounding principal. For example, with excitation systems, where the energy is delivered directly from armature circuit to excitation winding by means of compounding transformer and rectifier. Self-excitation system, which in the case with variable load can ensure excitation current automatic compounding (for example to provide constant cosyp), can be simplified by using induced EMF of the third harmonic of a magnetic field to supply excitation winding. This work has been partly supported by the European Social Fund within the National Programme "Support for the carrying out doctoral study programm's and post-doctoral researches" project "Support for the development of doctoral studies at Riga Technical University". Andrejs Podgornovs, Ph. D. student is with the Institute of Power Engineering, Riga Technical University, Kronvalda bulv. 1, LV-1010 Riga, Latvia(e-mail: andrejspAeefrtu.lv). Andrejs Zviedris, Associate Professor is with the Institute of Power Engineering, Riga Technical University, Kronvalda bulv. 1, LV-1010 Riga, Latvia(e-mail: aaazzzAeefrtu.lv). Synchronous motors third harmonic of the magnetic field rotate with synchronous rotation frequency n1=60%f/1p, but the number of pole 2P3 are three times higher comparison with number of pole 2p of fundamental harmonic. To use third harmonic energy with high efficiency is necessary in the motor slots to build in auxiliary winding, witch have 2p3=6p number of poles, y3 =Z6p winding pitch and number of phase M3. Taking into consideration these conditions EMF E3(3) of triple frequency is induced in auxiliary winding, but EMF of the fundamental harmonic not induced - E3(1)=O. It is helpful to place auxiliary winding in the same armature slots where the main three-phase armature winding is located. An auxiliary winding design principles and definition of it's parameters are explained in [1]. The principle scheme of the excitation system including auxiliary winding with number of phases M3, rectifier block and excitation winding with active resistance Rf and inductance Lf is shown in Fig. 1. Investigate synchronous motors third harmonic self- excitation analysis and synthesise tasks must be solved. An analysis task includes magnetic fields mathematical simulation to define magnetic field allocation influence to the different parameters and this allocation influence to the motor characteristics (flux linkage, EMF, cosy'). It signifies correctly to take into account geometrical shape of the magnetic system and some elements of the magnetic system non-linear characteristics, by using finite element methods as simulation tool. At the same time, synthesise tasks are to define auxiliary winding parameters and rotor's pole geometrical parameters, which ensure third harmonic energy high efficiency utilization, to obtain excitation systems design recommendations. Synchronous motor rotating magnetic field simulation can be realized with stationary magnetic field simulation methods. As the result of magnetic field simulation the distribution of the vector potential A in fixed points xi, Yi of calculation range (cross section of a machine or its part) is obtained as the discrete argument function Ai(xi, yi) and, as second step, is possible to get the change in time of the vector potential as the discrete argument function Ai1 (xi, yi, tj) from its space distribution Ai (xi, yi) [2,3,4]. Synchronous motors usually designed as salient pole synchronous machines. Salient pole synchronous machines calculations and analysis widely use the theory 1-4244-1055-X/07/$25.00 ©2007 IEEE.
Transcript of [IEEE 2007 Compatibility in Power Electronics - Gdansk, Poland (2007.05.29-2007.06.1)] 2007...
![Page 1: [IEEE 2007 Compatibility in Power Electronics - Gdansk, Poland (2007.05.29-2007.06.1)] 2007 Compatibility in Power Electronics - Characteristics of the Synchronous Motors Determination](https://reader036.fdocuments.in/reader036/viewer/2022081823/5750a1da1a28abcf0c96b363/html5/thumbnails/1.jpg)
Characteristics of the Synchronous MotorsDetermination by Results of Mathematical
Simulation of a Magnetic Field
Andrejs Podgornovs and Andrejs Zviedris
Abstract - Static excitation system of synchronous motor byusing the compounding principle is considered in this work.The magnetic induction distribution of salient polesynchronous machine is nonsinusoidal in air gap and fromthe higher harmonics of a magnetic field the mostexpressed is the third harmonic. Therefore the auxiliarywinding can be placed in armature of a machine to use thethird harmonic energy of a magnetic field. The maindevelopment principles of the above-mentioned excitationsystem based on the analysis of main parameters ofarmature windings in synchronous machines are surveyedin this work. There has been worked out the methodologyfor determination of self-excitation system characteristicsusing magnetic field calculation by the finite elementmethod, which enables to get particular magnetic fieldnature.
Index Terms - compounding, magnetic field, self-excitation,synchronous machine, the third harmonic.
Synchronous motors in comparison this inductionmotors have more important advantages, there areoperation with cosp=1, and in the overexcitation mode candonate reactive power back to the power supply system togrow up system power factor, to reduce voltage fallingdown and power losses as a result. These advantages ofthe synchronous motors can ensure with excitationsystems, which are provided automatic regulation. Thisexcitation system must ensure sufficient operation speed,must be reliable and operate till a resort of a compoundingprincipal. For example, with excitation systems, where theenergy is delivered directly from armature circuit toexcitation winding by means of compounding transformerand rectifier.
Self-excitation system, which in the case with variableload can ensure excitation current automatic compounding(for example to provide constant cosyp), can be simplifiedby using induced EMF of the third harmonic of amagnetic field to supply excitation winding.
This work has been partly supported by the European Social Fundwithin the National Programme "Support for the carrying out doctoralstudy programm's and post-doctoral researches" project "Support forthe development of doctoral studies at Riga Technical University".
Andrejs Podgornovs, Ph. D. student is with the Institute of PowerEngineering, Riga Technical University, Kronvalda bulv. 1, LV-1010Riga, Latvia(e-mail: andrejspAeefrtu.lv).
Andrejs Zviedris, Associate Professor is with the Institute of PowerEngineering, Riga Technical University, Kronvalda bulv. 1, LV-1010Riga, Latvia(e-mail: aaazzzAeefrtu.lv).
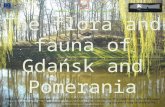
Synchronous motors third harmonic of the magneticfield rotate with synchronous rotation frequencyn1=60%f/1p, but the number of pole 2P3 are three timeshigher comparison with number of pole 2p of fundamentalharmonic. To use third harmonic energy with highefficiency is necessary in the motor slots to build inauxiliary winding, witch have 2p3=6p number of poles,y3 =Z6p winding pitch and number of phase M3. Takinginto consideration these conditions EMF E3(3) of triplefrequency is induced in auxiliary winding, but EMF of thefundamental harmonic not induced - E3(1)=O. It is helpfulto place auxiliary winding in the same armature slotswhere the main three-phase armature winding is located.An auxiliary winding design principles and definition ofit's parameters are explained in [1]. The principle schemeof the excitation system including auxiliary winding withnumber of phases M3, rectifier block and excitationwinding with active resistance Rf and inductance Lf isshown in Fig. 1.
Investigate synchronous motors third harmonic self-excitation analysis and synthesise tasks must be solved.An analysis task includes magnetic fields mathematicalsimulation to define magnetic field allocation influence tothe different parameters and this allocation influence tothe motor characteristics (flux linkage, EMF, cosy'). Itsignifies correctly to take into account geometrical shapeof the magnetic system and some elements of themagnetic system non-linear characteristics, by using finiteelement methods as simulation tool. At the same time,synthesise tasks are to define auxiliary windingparameters and rotor's pole geometrical parameters, whichensure third harmonic energy high efficiency utilization,to obtain excitation systems design recommendations.
Synchronous motor rotating magnetic field simulationcan be realized with stationary magnetic field simulationmethods. As the result of magnetic field simulation thedistribution of the vector potential A in fixed points xi,Yi of calculation range (cross section of a machine or itspart) is obtained as the discrete argument functionAi(xi, yi) and, as second step, is possible to get thechange in time of the vector potential as the discreteargument function Ai1 (xi,yi, tj) from its space
distribution Ai (xi, yi) [2,3,4].
Synchronous motors usually designed as salient polesynchronous machines. Salient pole synchronousmachines calculations and analysis widely use the theory
1-4244-1055-X/07/$25.00 ©2007 IEEE.
![Page 2: [IEEE 2007 Compatibility in Power Electronics - Gdansk, Poland (2007.05.29-2007.06.1)] 2007 Compatibility in Power Electronics - Characteristics of the Synchronous Motors Determination](https://reader036.fdocuments.in/reader036/viewer/2022081823/5750a1da1a28abcf0c96b363/html5/thumbnails/2.jpg)
Auxiliary winding
UA
Excitation windingr- - - - - - - - - -I
RtIdI
Rf
Ud fLf
UdI
I l_I____
Fig. 1. The network diagram of the excitation system with supply from m3 phases alternating voltage source.
of two reactions, which based in superposition principle.Theory of two reactions is based on longitudinal andtransversal synchronous induction resistances Xd and Xq.To tell the truth speaking superposition principle correctlycan be used just for linear system, this is, synchronousmotors with non-saturated magnetic system.Using the theory of two reactions, precisely to take intoaccount saturation influence from Xd and Xq parametersvalues are not possible. In practice, some approximatedmethods are used, but not always this methods givessatisfactory results. By and large the theory of tworeactions using for saturated machines magnetic systemsdon't give this advantages, for which it was created.
Resistances Xd and Xq in this situation lose obviousnessand physical sense, because it wasn't variable parameters,but its dependent from each other and from operationmode. To take into account this reasons to determinationof the synchronous machines characteristics recommended
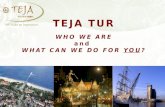
using Fig. 2. phasor diagram. In this phasor diagramresistances Xd and Xq in a direct view do not occur. In thisphasor diagram axes d and q are shown, but othersparameters are spotted from the magnetic field numericalcalculations, to take into account geometrical shape of themagnetic system and magnetic material non-linearcharacteristics [5].The synchronous motor with rated power PN=2 kW,
rated phase voltage 220 V and number of pole pairs 2pi=2is used as the basis of research. For creation of themathematical model of the finite elements only part ofmotor could be chosen for calculations due to thesymmetry and periodicity of a magnetic field. Thereforethe sector, which includes two poles of rotor (wholemachine), is chosen as the calculation range (Fig.3.). Thechoice of this calculation range gives the opportunity toreceive the full sight of a magnetic field for synchronousmotor in both: no-load and load operation (Fig.4.).
,q
U;E34
I
Ftd
F B-
Fig. 2. Synchronous motor phasor diagram: U - network voltage; E - resulting magnetic flux induced EMF; F F F - excitationwinding, stator winding ana a,i -excitation
winding, stator winding and resulting magnetic force.
I
![Page 3: [IEEE 2007 Compatibility in Power Electronics - Gdansk, Poland (2007.05.29-2007.06.1)] 2007 Compatibility in Power Electronics - Characteristics of the Synchronous Motors Determination](https://reader036.fdocuments.in/reader036/viewer/2022081823/5750a1da1a28abcf0c96b363/html5/thumbnails/3.jpg)
u3zTUd
2m3 sin
and EMF E3 considering voltage dropwinding
m
3 3 2 fON3'3. Taking into account that
E =444f k D3 3 w3 3
(1)
in auxiliary
(2)
(3)and
Ud Uj = RfIfON' (4)to find number of one coil turns for auxiliary winding as
Fig. 3 Finite elements grid visualization.
a3 zTUd
p3D3 2m,3 sin
+-IJONX3J
m3
Fig. 4. Sight visualisation of
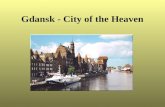
Using the results of magneticpossible to receive researchcharacteristics U1 = f(If ), E3 =
U3 = f(If ) shown in Fig. 5 [2].
The following sequence ofsuggested based on the analysisprocess in no-load operation.
1. To determine the curr
corresponds to voltage UN from cu
2. To calculate the phasewinding
4. From possible a3 values (considering that
amax /a = whole number) to calculate Ws3 using formula
(5) and choose the value that has the nearest wholenumber after rounding.
Using this calculation sequence for no- load operationand the results of magnetic field calculation for this modelof synchronous motor it could be concluded that the
energy of magnetic field third harmonic is enough toprovide supply of synchronous motor excitation windingin no- load operation. The calculations based on harmonicanalysis of a magnetic field are used for the taskrealization. These calculations allow to discuss not onlynumerical value of parameters but also change of their
form in time.
Generally synchronous motors working modecharacterize four base values: voltage U, armature current
I, excitation current If and angle. Analysing motorworking mode and it characteristics usually are necessaryto determinate excitation current If, which to the given
magnetic field. voltage U and armature current I will ensure necessaryangle. Is necessary to determinate functional equation
field calculations it is I4f(U,I,y). Taking into account this equation non-linearied model non-load characteristic we can't to obtain this equation directly, but
f(I =, I using processing
f() Ud =f((If methods, for example, synthesise of equations [6].Excitation current If determination can use the
following algorithm.calculations can be To the chosen armature current I are choose threeof the self-excitation values of excitation currents Il,=fmin, Il=Ifmax,
I42=(Ifmin+Ifmax)12 and three values of e angle 81=8min,ent IJON value which 83=8max, 82=(8min+8max)12. Necessary to choose this valuesirves in Fig.5 in the really probable spectrum, and for 3x3=9 this valuesvoltage of auxiliary combination to do magnetic field simulation using the
finite element method. From the obtained results andusing phasor diagram Fig. 2., table range are obtainfunctional dependence Ui,k=fi(f/,&d) and Yi,k=f2(Ifi,8)i=1,2,3 and k-1,2,3 values.
(5)
![Page 4: [IEEE 2007 Compatibility in Power Electronics - Gdansk, Poland (2007.05.29-2007.06.1)] 2007 Compatibility in Power Electronics - Characteristics of the Synchronous Motors Determination](https://reader036.fdocuments.in/reader036/viewer/2022081823/5750a1da1a28abcf0c96b363/html5/thumbnails/4.jpg)
Uv,VE3 Ud, U3, xlO V
160,0 j
140,0
Un
120,0
100,0
80,0
60,0
40,0Ud
20,0
0,0
U1, E3, Ud, U3 =f(If)
0 0,5 1 1,5
--- Main windingvoltage
- -0--Aux winding EMF
..- *-.Aux winding voltage
--* Aux winding DC
2I- Irv2 pt rv
Fig. 5. Self-excitation characteristics of synchronous motor.
These dependencies can be approximated by analyticalmethods - second-degree polynomial
U = a+a2If + a38+6a4If8+6a5If + a672 +
2f
22 (6)+ a77f 8+ + a9If 8
= b1 +b2I -b38+b I-b5<I +b6 2 +
+ b7If> + b8If + b(I7)
there are valuesa1,a2,...,ag and bh b2,...Ib9 can bedeterminate to solve two ninth equations systems,inserting to equations (6) and (7) Iik, (Pi,k, If, and 8k values.By and large are obtained analytical equations, which
present two equations non-linear systemU=fi(f £) I
=f2(If, £),
(8)
(9)
haven solved which for given mode parameters (are givenU=const and yp=const values) obtain for this modecorresponding If and e values. Solving equation systemuseful to use optimization theory [7] known bisectionmethod with exception of intervals.
REFERENCES
[1] A. Zviedris, A. Podgornovs "Sinhronas masinaspapildtinuma parametru izvele pasierosmes sistemai armagnetiska lauka tresas harmonikas izmantosanu", RTUzinatniskie raksti "Energetika un elektrotehnika", 4. serija,13. sejums, R.: RTU, 2004, 79. 'pp.
[2] A. Podgornovs, N. Roldugina, A. Zviedris "Sinhrono dzinejupasierosmes raksturlielumu noteiksana ierosmes sistemai armagnetiska lauka treso harmoniku" RTU zinatniskie raksti"Energetika un elektrotehnika", 4. serija, 15. sejums, R.:RTU, 2005, 7. 'pp.
[3] Zviedris A. Elektrisko masinu elektromagnetiskie apre,kini.R.: RTU, 2001, 71 'pp.
[4] A. Podgornovs, N. Roldugina, A.Zviedris "Analysis ofsynchronous motor self-excitation possibilities using thethird harmonic of a magnetic field" HayKoBo-IIp4KjaJHn44)KYpHaAJ TeXHHLIHa ejieKTpO,HHaMH4Ka, -iaCT14Ha 4, 2006, 71CTp.
[5] A. Zviedris, A. Podgornovs ,,Metodologiskie aspektisinhrono ma8inu vektoru diagrammu izmantosanai darbare.imu analizei", RTU zinatniskie raksti "Energetika unelektrotehnika", 4. serija, 16. sejums, R.: RTU, 2006, 94-100. 'pp.
[6] A. Zviedris Datorrealizacijas matematiskas metodes. R.:RTU, 2004, 80 'pp.
[7] A. Zviedris Elektromagnetisko ier-icu magnetisko sistemuoptimizacija. R.: RTU, 2004, 46 'pp.











![Transformer Compatibility _EU LED Lamps _MR16 MR16 _7.0W : SAMSUNG Electronics LED MR16 Transformer compatibility list [Non-dimmable] MR16 _3.2W MR16 _5.0W.](https://static.fdocuments.in/doc/165x107/5519e6c15503467a178b4965/transformer-compatibility-eu-led-lamps-mr16-mr16-70w-samsung-electronics-led-mr16-transformer-compatibility-list-non-dimmable-mr16-32w-mr16-50w.jpg)