Hydrographic Surveying
173
-
Upload
shazrin-yusof -
Category
Documents
-
view
199 -
download
25
description
about surveying.
Transcript of Hydrographic Surveying


Hydrographic surveying is a type of survey which is conducted on or near a body of water, such as a bay, harbour, lake or river. Hydrographic surveys are conducted to determine the position of the bottom of bodies of water, to determine submarine contours and to locate other topographical features related with large bodies of water.
Hydrographic surveys are also conducted for making nautical charts for navigation and for planning and designing of engineering projects related with large bodies of water such as bridges, dams, docks and harbours. Hydrographic surveys consist of one or more of the following operations.
9˙1 INTRODUCTION

1. Measurements of tides at sea coast.This is required for the establishment of a leveling datum and for
reducing the soundings to a common datum. (The measurement of depth below the water surface is called sounding).
2. Determination of bed depths by soundings.The depth of bed is required for navigation and for location of rocks,
sand bars, navigation lights, buoys, etc. The bed depths are also required for the location of underwater works, for the computation of volume of underwater excavation and for the planning of irrigation and drainage schemes.
3. Determination of direction of currents.This is required for navigation purposes and for the location of sewer
outfalls. These are also useful to locate areas subjected to scouring and silting.
4. Measurement of dischargeThis is required in connection with flood control, power development,
water supply schemes, etc.

9˙2 HORIZONTAL CONTROL
In most hydrographic surveying, a single horizontal control survey is done to serve both for shore details and for offshore details. The horizontal control usually consists of a series of connected lines whose lengths and azimuths are determined accurately. For rough works, these connected lines may form a tachometric traverse or a plane table traverse. However, for more precise control, a theodolite and a tape traverse is usually run. For extended surveys where great precision is required, the horizontal control is a triangulation system.
When making soundings of the depth of a river bed or sea bed, the location of the sounding vessel is fixed by reference to fixed to control points on shore. For precise location, the control points should be fixed accurately. It is essential to establish suitably located intervisible control points all along the shore line. As permanent control points cannot be established in water, hydrographic charts are prepared with reference to control points located on the shore.

No definite rules can be given whether the control should consist of a traverse or a triangulation system. It depends upon a number of factors, such as topography, reliefs, type of the water body, and size of water body. The following guide lines should be kept in view while selecting the type of control.
1. For long and narrow rivers where shore conditions are favourable to traversing, a traverse is run only on one shore.
2. For a long and wide river, with a width more than about 1 km, the traverse is usually run on both sides and the two traverses are connected by suitable ties.
3. When the store lines of rivers and lakes are not suitable for traversing, a triangulation system is used. A base line is measured at the beginning and at the end of the survey. Check bases are also measured at very 15 km or 20km.
4. For large lakes and ocean shore lines, the horizontal control consists of a network of connected triangulation systems on shore. These are usually supplemented by traverses run along the shore and connected to the primary triangulation system.
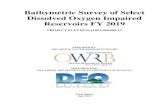
Fig. 9˙1 shows a combined triangulation and traverse system for a wide river.

Δ Triangulation Station ˚ Traverse StationFigure 9˙1

9˙3 VERTICAL CONTROL
Bench marks are established to serve as vertical control. The bench marks are located near the shore line at close spacing. The bench marks are required for setting and checking the levels of gauges. The soundings are referred to these gauges.
Mean sea level (M.S.L.) is generally used as a datum for all types of surveys. Mean-sea level at selected points along the shore of a country is determined for establishing the datum. The mean sea level is determined by taking hourly observations extending over a period of 19 years for establishing the datum.

The following procedure is used for establishing the datum.
1. A gauge is set at a location where it is protected from rough wave action, and where water level not affected by local conditions. The gauge should be located at a low level in sufficient depth of water so that the gauge reading can be taken even at low tide.
2. The zero of the gauge is referred to a permanent point on shore to serve as a bench mark.
3. The elevations of water surface are read continuously for 19 years.However, observations extending over one lunar month will give results
which are quite close to the average of 19years. These results can be used for most of the hydrographic surveys.
4. The mean of all the readings is taken to compute the mean sea level (M.S.L)
5. When the gauge reading is equal to M.S.L., the level of a permanent point on the shore is determined. The permanent point would serve as a bench mark (B.M) after its elevation with reference to the mean sea level has been determined.

TIDAL DATUM
For navigation purposes, tidal datum instead of the mean sea level datum is used. The tidal datum is the level of the water surface below which the tide rarely falls. It is also known as the mean low water spring datum (M.L.W.O.S.T.) or the chart datum.
Tidal datum is more convenient than the mean sea level datum because negative values of elevations are avoided.

9˙4 SHORE LINE SURVEY
Shore line survey is conducted to prepare a topographical map of the shore line. It consists of the following operations.
1. Location of the shore line.2. Location of the shore-line details3. Location of light houses, and other features.4. Determination of high and low water lines for average spring tides.
Location of the shore line is usually done by normal methods of chain survey, plane table survey or compass survey. The shore line elevation is located by a level party as a trace contour.

The details are generally located by the tacheometric method or the plane-table method. All irregularities in shore line should be located accurately. All prominent features of topography and man-made features should be located so that these points can be later used as references in range lines and sounding work.
Determination of high-water line is done by locating the points on the shore at the time of high tides. These points can easily located from the visible marks on permanent rocks after the high tide has subsided. The imaginary line connecting all such points is the high water line. Determination of low water line is rather difficult because the low water line does not remain exposed for a long period. The low water line is usually determined indirectly by interpolation from soundings.

9˙5 THEORY OF TIDES
The alternate rise and fall of the surface of sea water caused by the gravitation pull of the moon and sun on the body of water are called tides. The periodic oscillations of the sea level are caused by the variation of the attractive forces of the moon and the sun. The attractive forces vary because of change in the relative positions of the moon and the sun relative to the earth. The tidal phenomena are widely difference at difference places because of the earth’s irregular land masses and because of the variation of the depth of water. At some places on the coast, there is no tidal change, whereas at other places the tidal oscillations may exceed 15m. Moreover, there is no definite pattern and the relation of the tidal phenomena to the actual positions of the moon and the sun is highly variable. The actual theory of tides is very complex and beyond the scope of this text. A simplified presentation is given below.

Newton’s equilibrium theory is probably the simplest and the most commonly used theory. This theory is based on Coulomb’s law of attraction between heavenly bodies. The force of attraction between two celestial bodies acts in a straight line joining their centres. The magnitude of the force is directly proportional to the product of their masses and inversely proportional to the square of the distance between them. Thus
2
21
d
mmF
Where m1 and m2 are the masses, and d is the distance between them.

Figure 9˙2

The tides caused due to the gravitational force of attraction between the
moon and the earth are called lunar tides. The tides caused due to the force of attraction between the sun and the earth are called solar tides. Because the moon is nearer to the earth, the lunar tides are more important of the two. The cycle of tidal phenomena is mainly governed by the moon and its principal period is
equal to the apparent period of rotation of the moon around the earth, which is approximately equal to 24 hours and 50 minutes.
In addition to the force of attraction discussed above, there is the centrifugal force due to rotation of earth about its axis. The tides are caused by the resultant force of the two forces due to the celestial bodies and the
centrifugal forces.
The following assumptions are made in the Newton equilibrium theory.
1. The earth is surrounded all around by an Ocean of uniform depth.2. The ocean water has no inertia and viscosity and it is capable of assuming the
equilibrium figure instantaneously after the application of the resultant force.

Effect of Moon
The moon and the earth revolve around each other in ellipses in a period of about one lunar month. The curvature of the elliptical path is such that the centrifugal forces of the moon and the earth balance the effect of the gravitational pull between them. Thus the two forces are balanced. But this balance exists only at the centre of mass. At points on the earth surface which are nearer to the moon than earth’s centre, the gravitational pull is greater than the centrifugal force, and the water surface is pulled out. Thus the bulge of the ocean surface is caused by the unbalanced force. At points on the earth surface which are nearer to the moon than earth’s centre, the gravitational pull is greater than the centrifugal force, and the water surface is pulled out. Thus the bulge of the ocean surface is caused by the unbalanced force. At points on the earth’s surface which are away from the moon, the gravitational pull is slightly less than the centrifugal force. The water surface is depressed. Thus there is one bulge towards the moon and one away from the moon. (Fig.9˙2).

The surface of sea water takes the shape of an ellipsoid whose axis passes through the moon in bolt the cases. As the earth rotates, the ellipsoid changes its position. At any points on the earth’s surface, each of the two bulges pass twice in a lunar day and, therefore, there is one high-water stage and one low-water stage. (Fig.9˙3).
Figure 9˙3

The moon moves from a point south of the equator to a point north of the equator every month. As the axis of the ellipsoid follows the moon, its position also changes. When the moon is north of the equator, there is a bulge in the sea which is centred under the moon. There is another bulge centred opposite to the moon. However, the tide under the moon is higher than that opposite the moon.

Effect of Sun
The effect of the sun on the tides is similar to that of the moon. Because of the large distance, the effect is relatively small. It is about half of that due to moon. The sun increases the effect of the moon at the new moon and the full moon when the sun, moon and earth are in one line. The effect is decreased when the sun and moon are at right angles when viewed from the earth. This occurs in the first and third quarter of the lunar month. The tides of increased effect are called spring tides and those for the decreased effect are called neap tides.
The following points may be noted.
a) The combined effect of the moon and the sun is a maximum at the new moon. The sun and the moon have the some celestial longitude and the cross the meridian simultaneously. If it is assumed that they lie in the same horizontal plane passing through the equator, their effects are added and it gives rise to the maximum tide or the spring tide. Fig. 9˙4 (a) shows the spring tide.

FULL MOON 15 DAYS
SUN
MOON
MOONNEW MOON
0 DAY
EARTH
(a) SPRING TIDES
DAYS
SUN
MOON
DAYS
EARTH
MOON
(b) NEAP TIDES

b) After the new moon, the moon trails behind the sun. The moon crosses each
difference between the longitude of the moon and that of the sun is equal to 90˚. The moon is said to be at quadrature. The effects of the moon and the sun oppose each other and the crest of one coincides with the trough of the other. It gives rise to be minimum tide or the neap tide. Fig. 9˙4 (b) shows the neap tide.
2
17meridian 50 minutes after the sun has crossed. After about days, the
c) After about 15 days of the new moon, the full moon occurs. The difference between moon’s longitude and sun’s longitude is 180˚, and both are in opposition. However, the crests of both the tides coincide and once again the maximum tide is obtained. It is called spring tide of the full moon (Fig. 9˙4 (a)).
d) After about 2
122
moon and the sun is equal to 270˚ and the neap tide of the third quarter occurs (Fig. 9˙4 (b)).
days of the new moon, the difference in longitudes of the

e) After about 2
129
again have the same longitude, and the spring tide of the new moon is again formed.
days of the previous new moon, bolt the moon and the sun
It may be mentioned that the equilibrium theory is based on various assumptions which are seldom justified. Moreover, these are many other factors that affect the tides which have not been considered. The actual field observations of the tides are sometimes quite different from the predicted values. To have a clear picture of the patent of tides at a particular place, it is essential to have tidal observation over a long period of time, usually 19 years. The combined cycles of the sun and the moon repeat the same patent once in about 19 years. To study various stages of the tides at a place, the record must be available for over 19 years.
The whole cycle thus repeats with a period of about 2
129 days.

9˙6 TIDE GAUGES
Tide gauges or water gauges are installed at suitable places to determine the water level and its variation with time. The elevation of the surface of water is required when the sounding is taken so that the depth measurement can be used to determine the elevation of the bottom.
In tidal water, tide gauges are used to establish a datum relative to a certain stage of the tide. The water gauges are used in rivers to determine the depth of water for the computation of discharge. The water gauges are also used in reservoirs to estimate the volume of the stored water. Tide gauges are also used to establish a datum at mean sea level for geodetic leveling.

The tide gauges may be broadly classified into two types.
1. Non-registering tide gauges.2. Self- registering tide gauges.
In non-registering tide gauge, an attendant is required to take the reading; whereas in the self-registering tide gauges, the readings are automatically recorded on a graph. The self-registering tide gauge is described in the next section.
The non-registering tide gauges are of the following three types.
1. Staff gauges2. Float gauges3. Weight gauges

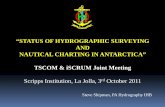
1. Staff gauge
A staff gauge usually consists of a painted wooden board, about 150mm wide and 100mm thick. It is marked in metres and decimeters from the bottom upward. The graduations should cover sufficient height so that the highest as well as the lowest tides may be recorded. The zero graduation is generally below the lowest water level so that all readings are positive. The staff gauge if fixed vertically at the site of observation (Fig.9˙5a). The staff gauge is read by noting down the readings of the crests and troughs of several waves. The two values are recorded and the average value is taken as the water level.
The staff gauge should be calibrated before use. To calibrate the staff gauge, differential leveling is done from the nearest B.M. to a point on the staff gauge. Thus the actual R.L of the staff zero is determined.

Figure 9˙5
STAFF
INDEX MARK
FLOAT
HOLES
(b)
1
3
2
0
4
(a)

2. Float gauge.
A float gauge consists of a float to which a staff is attached. The float and the staff are enclosed in a stilling well. The stilling well is often made of pipe or wooden boards. The well is usually of the cross-section 300mm×300mm. A few orifices (holes) are provided in the bottom and the sides of the well through which water can enter (Fig.9˙5b). Thus the water level inside the well is the same as that outside the well. The orifices have the tendency to clog and need proper maintenance. The staff extends through a hole at the top of the well. The staff is graduated, with graduations increasing downwards. The reading of the staff is taken against an index mark through a slit window.
Float gauges are more suitable than staff gauges at places where the intensity of tides is high. In such cases, staff gauges are difficult to read owing to the wave action but float gauges are convenient and give reasonably accurate results.

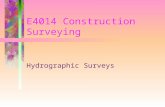
3. Weight gauge
The weight gauge (or a chain gauge) consists of a brass chain having a weight attached to its one end. The chain passes over a pulley and is laid horizontal along the side of a graduated scale (Fig. 9˙6). The weight touches the water surface. The reading is taken on the graduated scale against an index attached to the chain.
The weight gauge is first calibrated. The reduced level of the water surface corresponding to the zero reading of the gauge is determined by differential leveling. For calibration, the foot of the staff is kept against the bottom of the weight when the index of the chain is against zero reading and a foresight is taken with a leveling instrument.
As the water level changes, the weight moves up or down and the reading is changed. Thus the water level is determined.
When the gauge is not in use, it is hooked to a board. The gauge is usually mounted on a bridge, but may also be located on the river bank.

Figure 9˙6
GRADUATED SCALE
CHAIN INDEX
WEIGHT
˙

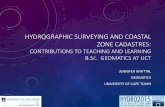
9˙7 SELF-REGISTERING TIDE GAUGEA self-registering tide gauge automatically records the variation of
water level with time on a graph attached to a recording drum. The gauge consists of a float placed in a stilling well (Fig. 9˙7). Thus the float is protected from wind, waves, etc. the float is attached to a wire (or a cord) which passes over a float wheel. The wire is maintained at a constant tension by a counterweight, marked (1) in figure.
The movement of the float occurs when the water level changes. The movement is transferred to the float wheel which reduces it through some gear system. The movement is finally communicated to a stylus (or a pencil) attached to a lever. The movement of the stylus is recorded on a graph paper wound round the recording drum. The recording drum rotates at a constant speed by a suitable clockwork arrangement. The time is indicated on the horizontal axis of the graph and the water level is indicated on the vertical axis by the stylus. Thus a graphical record of the movement of the float with time is obtained. The stylus wire is kept under constant tension by two counter weights (2) and (3), as shown.

Sometimes the self-registering tide gauges stop working. It is a good practice to install a visual staff gauge to check the working of the self-registering gauge at frequent intervals.
The self-registering gauge is usually housed in a well constructed under a building in order to minimize the effect of wind and other disturbances. If kept in open, the gauge may not work efficiently due to the effect of wave action.

Figure 9˙7
COUNTER WEIGHT
RECORDING DRUMCLOCK
STYLUS WIRE
FLOAT WHEEL
COUNTER WEIGHT
COUNTER - WEIGHT
FLOAT
STYLUS
(3)
(1)
(2)

9˙8 SOUNDINGSDetermination of the bed profile of a water body is one of the main
operations in hydrographic surveying. The process of determination of the bed depth of a water body is called sounding. In other words, sounding is the measurement of depth of bed below the water surface. Once the water depth has been determined by sounding, the bed level can be determined. Obviously the bed level is equal to the reduced level of the water surface minus the depth of water. However, the water level does not remain constant. In order to determine the reduced level of the bed accurately, it is essential to determine the reduced level of the water surface at the time of sounding by the tide gauge. Thus the water-level measurement and soundings are two essential steps for the determination of the bed profile.
The sounding operation is generally carried out from a flat-bottom boat of the low draft. For sounding in the sea, the boats of large size and equipped with a motor or launches are used. For tidal waters, round-bottomed boats are more suitable. A common name vessel is commonly used for all types of boats.

The sounding boat should have sufficient space and should be stable under different conditions. Boats are generally provided with openings, called wells, through which soundings are taken. In smaller boats, a sounding platform extending far enough over the sides of the boat is provided so that the sounding line or sounding rod does not strike the boat. If the depth of water is not more that 25m or so, the sounding is made without stopping the boat.
Soundings are required for one or more of the following purposes.
1. For determination of the bed profile and for location of the areas from where the material can be dredged or the areas where the dredged material can be dumped.
2. For locations of the areas subjected to scouring or silting, and to determine the quantities of the material involved.
3. For preparation of charts for navigation.4. For collection of subaquous information. The information collected is used
for the design, construction, development and improvement of ports, and other related structures.

Soundings may be carried out by the following methods.
1. Direct Methods. (a) Sounding rods, (b) lead line, (c) Sounding Machines.
2. Indirect Methods. Echo-sounder or fathometers. Echo-sounder is discussed in the next section.
For complete information, it is essential to locate the position of the point where a sounding is taken, as discussed in Art.9˙11.

a) Sounding rods.
A sounding rod is a rod of 5 to 8 m length. The diameter is between 5 to 10 cm. When the currents are not strong, wooden rods can be used. The sounding rod generally consists of two or three lengths screwed together. For shallow water, instead of the full rod, smaller lengths can be used. The rod is generally graduated in metres, decimeters and half-decimetres. The graduations are form bottom upwards. Thus the reading of the sounding rod at the water surface directly gives the depth of water. A rod of about 5 m length is required for sounding depth upto 4m.
An arrow or lead shoe of sufficient weight is fitted at the bottom of the rod so that the rod can be held vertical in flowing water. The base area of the arrow or the lead shoe should be large so that it does not sink into mud at the bed. In strong currents, it becomes difficult to maintain the verticality of the rod, and the results obtained are not correct.

b) Lead Lines
A lead line is generally a rope made of hemp. A lead (or sinker) is attached to the end of the lead line. Sometimes, a metallic chain is used as a lead line. Chains of brass are better than hemp lead line due to wetting, the line is first thoroughly stretched when wet and then it is dried. The process of wetting and drying is repeated a number of times till the stretch is negligible. The line is then soaked in water and graduated at very metre interval. Cloth tags or leather tags are generally used to indicate metres.
The mass of the lead generally varies between 5 to 10 kg, depending upon the strength of current and the depth of water. The lead is usually of conical shape and stream-lined (Fig.9˙8). It has an eye at the top for attaching it to the lead line. The lead often has a cup-shaped cavity at the bottom for lifting samples. If the bottom surface is very soft, a lead-filled pipe fitted with a board is attached to the lead weight. The weight penetrates the soft soil, but it stops when the board strikes the soil surface.

Figure 9˙8

If the lead line is used for taking sounding in deep and swift-flowing water, the measured length of the line will be greater than the true depth because of drag (Fig.9˙9). The correction is applied to the measured length to obtain the correct depth.
SOUNDING LINECURRENT DEPTH
APEX OF VERTICAL ANGLE
BED
Figure 9˙9

c) Sounding machine
A sounding machine is useful when a large number of soundings are to be taken and when the depth of water is large. The sounding machine may be automatic or hand-driven. Fig. 9˙10 shows a hand-driven sounding machine. It is also called Waddell’s sounding machine.
It consists of a barrel which can be rotated by the winding handle. A lead weight is attached at one end of a flexible wire and the other end is attached to the barrel. The lead weight may be raised or lowered by the winding handle. It may be suspended at any height by means of a pawl arm. The amount paid out which is related to the depth is measured by a friction-driven roller and it is shown on a recording dial. There is a brake to control the speed of the drum.

The machine is fixed over the well of the sounding boat. It can be used to measure depths upto 30 m.
Figure 9˙10

9˙9 ECHO-SOUNDER
An echo-sounder (also called fathometer) is an instrument which is used for sounding in ocean where the depth of water is great. The echo-sounder consists of a transmitting unit and a receiving unit. A sonic or supersonic impulse is transmitted by a oscillator fitted in the bottom of the sounding vessel. The return (echo) impulse is picked by the receiver also fitted on the same vessel. It records time interval between transmission and reception. The depth is determined indirectly from the time of travel of the sound waves from a point near the surface of water to the bottom of the sea and back to the water surface (Fig.9˙11).

RECEIVER
d
TRANSMITTER
DATUM
h
Figure 9˙11

tvh2
2
vth
22 2d'hh
2
vt
or
Where v = speed of sound in water. t = time interval between the transmission and reception of the
signal.
As the transmitter and the receiver are at a small distance d, a slight correction is required. The actual depth is given by
Where h′ is the inclined distance, given by h′ =
The depth (h) is given by the relation

For shallow depths, the correction is significant, but for great depths, it is negligible.
Because the velocity of sound waves varies with density of water, the echo-sounder should be adjusted to read the depth for different densities. The echo-sounder indicates the depth graphically on a roll which continuously goes on revolving at a uniform speed. The record of depth is made by a stylus. Thus it provides a profile of the ocean.

Advantages of echo-sounder
An echo-sounder has the following advantages over the conventional leadline method.
1. It is more accurate, and it gives the vertical depth correctly. It is more sensitive than the line method.
2. It can be used even in strong currents and when the weather is not suitable for the lead-line method.
3. It gives a continuous record of the bed.
4. The sounding and plotting is done quickly.
5. Rocks underlying the softer bed material can also be located.

Limitations of echo-sounder
1. The instrument cannot be used to jetties and quay walls which may reflect the sound waves. It would cause interference with the waves coming from the bottom.
2. Air bubbles which may occur under the bottom of the vessel may cause reflection of the sound waves. The instrument should be carefully positioned with regard to the pockets of air bubbles.
3. For shallow depths, a correction is required because there is significant difference between the inclined distance and the vertical depth.
4. The impulses do not form a perfect beam but have a conical shape, with its main strength in an acute angle cone at the centre. On steep slopes at the bed, it causes an error. To reduce the error. To reduce the errors, the instrument has to be used at its lowest sensitivity when the bed is having steep slopes.

9˙10 REDUCING SOUNDINGS TO A FIXED DATUM
Soundings are taken from the water surface. These give the depth of bed as measured from the water surface. Since the water surface changes continuously, the reference surface for sounding also changes. In order to reduce the sounding to a fixed datum, it is necessary to take the readings of the tide gauge at the time of sounding. To correlate each sounding with the gauge reading, it is the usual practice to record of the tide gauge reading. Thus the water level at the time of sounding is determined from the record. For this purpose, a recorder goes on observing the tide gauge reading every 5 minutes.
Before soundings can be plotted, these are reduced to a fixed datum by subtracting (algebraically) the gauge reading from the measured sounding. Thus,
Reduced sounding = Measured sounding – Gauge reading

In Fig. 9˙12, the measured sounding is the height ac and the gauge reading is the height ab. Therefore, the reduced sounding is (ac – ab) = bc. It is indicated by h. The gauge reading is indicated by D.
In navigation, the mean low water of spring tide (M.L.W.O.S.T.) is commonly adopted as the fixed datum or chart datum. The difference between the actual water level (gauge reading) and the assumed datum is known as the correction for gauge reading. The correction is positive if the assumed datum reading is greater than the gauge reading and negative when it is less than the gauge reading.

WATER LEVEL
DATUM
SEA BED
D
h
a
b
c
2
1
0
Figure 9˙12

For illustration, let us assume that the gauge reading when the water level is at MLWOST is 3˙00 m (Fig.9˙13). Let the gauge reading at the time of sounding be 4˙0 m.
Figure 9˙13

Therefore, Correction to be applied = Gauge reading at M.L.W.O.S.T.
– Gauge reading at the time of sounding = 3˙00 – 4˙00 = 1˙00 m
Thus all soundings will be reduced by 1˙00 m
Let us consider the 5 soundings shown in the figure.
The soundings at points 1, 2, 3, 4 and 5 are respectively 0˙5 m, 3˙50 m, 4˙90 m, 5˙50 m and 5˙80 m. The corrected soundings are
Point (1) = 0˙50 – 1˙00 = – 0˙50 mPoint (2) = 3˙50 – 1˙00 = 2˙50 mPoint (3) = 4˙90 – 1˙00 = 3˙90 mPoint (4) = 5˙50 – 1˙00 = 4˙50 mPoint (5) = 5˙80 – 1˙00 = 4˙80 m

9˙11 METHOD OF LOCATING SOUNDINGS FROM SHORE
The point in the water body where a particular sounding has been made should be located in the horizontal plane so that it can be plotted on the drawing sheet. The points are located with reference to the shore control traverse by taking suitable observations. The observations can be made entirely from the shore, entirely from the vessel or from both the shore and the vessel. The location of soundings from the shore is discussed in this section.
Before taking the observations, it is the usual practice to mark a range line along which the soundings are taken. The range lines are generally marked perpendicular to the shore line. However, if the shore is irregular, the range lines are usually marked radiating from some prominent object or shore signal (Fig.9˙14 a).

The range lines are generally market by means of signals erected at two points on it. The points should be at a considerable distance apart for accurate making. The signals should be prominent and easily visible. Generally, the signal is made of wood. It consists of a wooden tripod and has a white and coloured flag of cloth at its top. Each signal should have some mark so that it can be distinguished from other signals. The positions of the signals should be located very accurately with reference to the shore traverse. Sometimes, spires, chimney, etc. near the shore are taken as the signals.

1. Location by tacheometer.
Fig. 9˙14 (b) shows the two range lines AA′ and BB′. The tacheometer is set up at the station A′ and oriented along AA′. A leveling staff is held vertically on the bottom of the sounding boat. The boatman rows the boat along the range line from shore to a1. When the boat reaches the point a1, a stadia reading is taken on the staff and a sounding is also taken. The second sounding is taken when the boat is at point a2. The stadia reading is also taken at the time. Likewise, other points are located. The horizontal distances of those points A′a1, A′a2 etc. are determined by tachometric formulae.
Now the boat is rowed along the range line BB′ and the sounding points b3, b2, b1 etc. are located by taking the stadia readings. For going from the range line AA′ to BB′, the boat is rowed perpendicular to the range line AA′ from a3 to b3.

In the same manner, the points on range line CC′ and other range lines (not shown) are located. The time of all sounding should be recorded.
The tachometer is generally set up near the shore line so that only horizontal sights are required. The tachometric calculations are relatively easier when the sights are horizontal.
This method of location of points on the range line is rapid and fairly accurate. However, the method is suitable only in shallow depths and smooth water, and where the width of the river is not great.

SIGNALS
RANGE LINES(a)
RANGELINE
A B C
A′ B′ C′
a1 b1 c1
b2 c2a2
b3 c3a3
(b)
Figure 9˙14

2. Location by range line one angle from the shore line.
1
B CA D
B′ C′
b1 c1
b2 c2
b3 c3
A′
a1
a2
a3
D′
d1
d2
d3
x1 x2 x3
Fig. 9˙15 shows the four range lines AA′, BB′, CC′ and DD′. The theodolite is set up at the station B′ for locating points on the range line A′A. the theodolite is oriented along the line A′B′. Let x1 be the perpendicular distance of the point B′ from the point A′
Figure 9˙15

The sounding boat is rowed along the line AA′. The first sounding is taken at point a1. The signalman on the boat gives the signal to the instrumentman at B′ to be ready by raising a flag a few seconds before the sounding is taken. The signalman lowers the flag at the instant of actual sounding, and the instrumentman bisects the signal on the boat. Thus the horizontal angle a1 is measured. The distance of the point a1 from A′ is given by
A′ a1 = a1 tan a1
Likewise, the other points a2, a3 etc. are located on the range lines AA′.
Now the boat is rowed perpendicular to the range line AA′ to the point b3
on the range line BB′. The instrument is shifted to the station C′. The horizontal angles of the points b3, b2, b1 from C′ are measured. Thus the points are located.
In the same manner, the points on the other range lines are located.
The time of all soundings should be recorded.
This method is quite accurate and convenient. It is commonly used in practice.

3. Location by two angles from the shore line.
The points can be located by measuring two angles from the shore line. This method is used when it is not possible to keep the sounding boat on a fixed range line. The method required two theodolites. The instruments are set up at two known stations A and B on the shore line which provide good visibility and intersections.
When the sounding boat is at a point P1 whose location is required, both the instrumentman measure the horizontal angles (Fig. 9˙16). Let the two angles be a1 and a2. The time at which the sounding is taken should be noted. The distance d between A and B is also measured.

180˚–
d
P1
BAC
y
x
21
1 2
Figure 9˙16

211
1
2
1
180sin
d
sin
BP
sin
AP
211
1
2
1
sin
d
sin
BP
sin
AP
2121
12
1221
sincoscossin
cossind
cossinsin
d
The distances x and y of the sounding point can be calculated as under.
From the triangle ABP1, by sine law,
Or
Let P1C be the perpendicular from P1 an AB.
Now x = AP1 cos 1α

21
2121
2112
coscos
1sincoscossin
coscos
1cossind
x
21
2
tantan
tandx
11 sinAPy
21
2121
112
2121
12
1221
coscos
1sincoscossin
coscos
1sinsind
sincoscossin
sinsind
sinsinsin
d
21
21
tantan
tantandy
Or
Or
Similarly,
Or
…(9˙1)
…(9˙2)

If required, the bearings of the lines AP1 and BP1 can be computed from the bearing of the line AB and the angles a1 and a2.
This method gives good results if the angle AP1B is approximately 90˚.
The main disadvantage of the method is that it requires two instruments. Moreover, it requires long time in occupying new stations of observations.
Both the disadvantage of the method is that it requires two instruments at frequent intervals. They should also compare their watches with the recorder in the boat before the start of the work and after the close of the work.

Illustrative Example 9˙1
There are two stations A and B near the shore line and 1000 m apart. When the sounding is taken at a point P, the horizontal angles at A and B are respectively 30˚ 15′ 20″ and 44˚ 26′ 40″. Determine the X and Y coordinates of P if those for the point A are respectively 600 m and 800 m.
m06657980790583310
9807901000
"40'2644tan"20'1530tan
"40'2644tan1000
Solution:
From Eq. 9˙1,
21 tantan
tandx

m77365
980790583310
5833109807901000
From Eq. 9˙2,
X-coordinates of P = 600˙00 + 627˙06 = 1227˙06 m
Y-coordinates of P = 800˙00 + 365˙77 = 434˙23 m
21
21
tantan
tantandy

9˙12 LOCATION OF SOUNDINGS FROM BOAT
In this method, observations are taken from the sounding boat with a nautical sextant at the time of sounding. The following two methods, are commonly used.
The use of a nautical sextant is discussed in Vol. I.
1. Location by range and one angle from the boat.
Fig. 9˙17 shows the 3 range lines AA′, BB′ and CC′. For location of soundings at points on the range line AA′, a signal is fixed at point B on the range line BB′. The sounding boat is rowed along the range line AA′ to the sounding point a1 and the angle A a1B (= a1) is measured with a nautical sextant. The time is also noted.

The distance A a1 is given by
A a1 = AB cot a1 = d cot a1
Likewise, the points a3, a2 etc. are located.
The above procedure is repeated for location of soundings on other range lines.
A B C
B′ C′A′
a1
a2
a3
d
Figure 9˙17

The method is not accurate and is rarely used in practice. The advantage of the method is that as the angles are measured from the sounding boat, there is better control over the field work.

2. Location by two angles from the boat.
In this method, the location of sounding is made by measuring two angles a1 and a2 simultaneously with a sextant from the sounding boat at P to three prominent signals A, B and C. (Fig. 9˙18). The location of P is determined by solving three-point problem (see Section 9˙16).
The precision with which the point P is located depends upon the relative locations of the points A, B, C and P. The problem becomes indeterminate when the point P lies on the circumference of the circle passing through A, B and C. This will occur when the sum of the angles ABC, a1 and a2 is equal to 180˚.

A C
B
P
21
The precision is poor when the point P is near the circumference of the circle passing through A, B and C. If the stations A, B and C are on a straight line or if the point B is nearer to the boat than points A and C, the location of P is accurate unless one of the angles a1 and a2 is very small.
If the sights PA, PB and PC are extremely long, the values of angles a1 and a2 will be small and the accuracy is reduced.
Figure 9˙18

9˙13 LOCATION OF SOUNDINGS FROM BOTH SHORE AND BOAT
The following methods are commonly used.
1. Location by range and time interval.
The range lines are marked as shown in Fig. 9˙19. The sounding boat is rowed from the shore near point a on the range and rowed along the range. After some time the boat attains a constant speed.
A sounding is taken at point a1, and the time of observation is noted. The distance aa1 is calculated from the speed of the boat and the line interval. The boat moves along the range AA′ from a1 to a3 and soundings are taken at regular intervals. Thus the distances of the various sounding points a2, a3 etc. are determined.
The method is not accurate, and it is used only in still water for short distances. The method is generally used to obtain the intermediate soundings between two soundings located by other methods.

A B
B′
b1
b2
b3
b
A′
a1
a2
a3
aVESSEL
RANGELINES
Figure 9˙19

2. Location by intersecting range lines.
Fig. 9˙20 shows two sets of intersecting range lines, one set perpendicular to the shore and the other set inclined to the shore. To locate the sounding point a1, row the boat to the point where the range AA′ and CB′ intersect. The signals are fixed at points B, B′, C, C′, etc. so that the points of intersection can be located by sighting. The location is thus obtained without measuring the angles.
The procedure is repeated for locating other points.
The accuracy of the method depends upon the distance between the intersecting ranges. The larger the distance, the more the accuracy.
The method is generally used to determine changes in the bottom level of a water body due to scouring or silting, and to determine the quantity of material to be removed by dredging. To know the changes in bed levels, it is required to repeat the soundings at the same intersection points after some time.

Figure 9˙20

3. Location by one angle from the shore and one angle from the boat.
Two points A and B are selected on the shore (Fig. 9˙21). The point A is the instrument station where a theodolite is set up. At point B, there is shore signal or any other prominent object.
Figure 9˙21

180sin
AP
sin
BP
sin
AB
sin
AP
sin
BP
sin
AB
sin
sind
sin
sinABAP
sin
sind
sin
sinABBP
P is the sounding point which is to be located. When the boat is at P, the angle α is measured with the theodolite at A and the angle β is measured at the boat with a nautical sextant. Knowing the distance d between A and B, the position of P can be determined from its coordinates x and y.
From the triangle APB,
Or
Thus
And

cosAPAP1
cossin
sindx
sinAPPP1
sinsin
sindy
sinBPy
.cosBPxd
Or
Also
Or
And
…(9˙4)
Check:
Let PP1 be the perpendicular from P on AB.
From the triangle APP1,
…(9˙3)

4. Location by stretched wire across a river.
If the river is of narrow width, a wire can be stretched between two supports at the two points A and B on the opposite banks (Fig. 9˙22). The width is divided into a number of segments, and tags are attached at the division points. The distances are marked from a reference tag, also called zero tag. The zero marked is transferred to the ground by a plumb bob.
The boat is rowed to a point a1 below the tag no.1, and a sounding is taken. The distance of the sounding point is known. Likewise, other points are located.
The method is quite accurate, but it is expensive. Moreover, the method can be used only when the width of the river is narrow.

Figure 9˙22

9˙14 PLOTTING OF LOCATION OF SOUNDINGS
The method of plotting the soundings depends upon the method used for the location of soundings.
1. If the soundings have been made along the range lines, the positions of the signals and range lines are plotted on the drawing sheet, and then the soundings are plotted on the range lines by measuring the corresponding distances.
2. If the soundings have been located by two angles measured on the shore, the point is located by drawing the lines at the corresponding angles and determining the point of intersection.
3. If the soundings have been located along the range line and one angle from the boat, the range line is plotted first. The sounding points are plotted by measuring the calculated distances from the shore station.
4. If the soundings have located by measuring two angles from the boat, the plotting is slightly difficult. It is a classical three-point problem, which can be solved as explained in Section 9˙16.

9˙15 SUBMARINE CONTOURS
Submarine contours, depths contours or fathoms, are the lines joining the points of the same depth below the water surface (Fig. 9˙23). The submarine contours can be obtained from the soundings.
Figure 9˙23

Depths of water determined by sounding are plotted on the cross-section to the desired scale. The points of depths of 1 m, 2 m, 3 m, etc. are determined and marked on the plan. Interpolation of submarine contours is done as in the case of contouring by spot levels. The line joining the points of 1 m depth is the submarine contour of 1 m depth. Likewise, the submarine contours of depths 2 m, 3 m, etc. are drawn. In Fig. 9˙23, the submarine contours are shown as straight lines for simplicity. In actual field conditions, these are curved.

9˙16 THREE-POINT PROBLEM
The three-point problem can be stated as under. Given the three shore signals A, B, C, and the angles α and β subtended at P by AB and BC, it is required to plot the position of P (Fig. 9˙24).
The problem can be solved by mechanical, graphical or analytical methods. The mechanical methods are discussed in this section. The analytical methods and the graphical methods are discussed in Sec. 9˙17 and 9˙18, respectively.
The mechanical solution can be obtained by the following methods.
1. By tracing paper2. By station pointer.

1. By Tracing Paper
The following procedure is used.1. Plot the positions of signal A, B and C on a plan to a suitable scale.
2. Take a tracing paper, and select a point P on it. Draw three rays from P
such that the angle between the first two rays is equal to α and that between the second and the third rays is equal to β.
3. Place the tracing paper on the plan, and move it on the plan until the
three rays simultaneously pass through the locations of A, B and C.
4. Prick the position of P on the plan. The point P is thus located on the
plan.

Figure 9˙24

2. By Station Pointer
A station pointer, also called three-arm protractor, consists of three arms (Fig. 9˙25). The two outer arms A and C are movable while the middle arm B is fixes so that its bevelled edge is at the 0˚ mark of the circle. The circle is graduated clockwise as well as anticlockwise from 0˚ to 360˚. The outer arms are capable of rotation about the centre. With the help of verniers and tangent screws, the movable arms are set to read the angles α and β to the nearest 1′.
Plot the positions of A, B and C on a plan. The station pointer is then laid on the plan, and moved about until the bevelled edges of the three arms simultaneously pass through A, B and C. When the station pointer is in that position, the centre of the station pointer is pricked to obtain the location of P.
The station pointer is very convenient and is generally used in practice. The accuracy of the plot is approximately the same as that of the sextant with which the angles are measured in the field. The extra lengths of the arms are usually supplied by the manufacturers for extending the arms in the case of very large maps.

Figure 9˙25

9˙17 ANALYTICAL SOLUTION OF THREE-POINT PROBLEM
sin
sincsin
sin
ABPB
sin
sincsin
sin
BCPB
In this method, the point P is located after calculating the angles or sides required for plotting the position of the point P. In Fig. Fig. 9˙24, let the angles BAP and BCP be respectively θ and φ. Let the angle ABC be γ. Let us assume that the points B and P are on the opposite sides of the side AC. Let the lengths BC, CA and AB be respectively a, b and c.
From the triangle ABP,
From the triangle CBP,
…(b)
…(a)

sin
sin
sin
sinc
sinsin
sin
a
csin
sayx360
x
sinsin
sin
a
cxsin
sinsin
sin
a
csinxcoscosxsin
From Eqs. (a) and (b),
Or
Now
Or
From Eqs. (c) and (d)
…(c)
…(d)
Or

xsinsina
sincxcotcot
xsinsina
sincxcotcot
xtanxsin
1
sina
sinc1xcot
xsecsina
sinc1xcotcot
Dividing both the sides by sin θ sin x,
Or
Or
The value of the angle θ can be calculated from Eq. 9˙5 if the angles α, β and x are known. The angle φ can then be calculated from Eq. (d).
…(9˙5)

ABPsinsin
ABAP
180sinsin
c
sinsin
cAP
sinsin
cBP
sinsin
aBP
Again from the triangle ABP,
Or
Thus the distance AP can be determinedAgain from the triangle ABP,
The distance BP can be found.
Likewise, in the triangle CBP,
…(9˙8)
…(9˙6)
…(9˙7)

180sinsin
aCP
sinsin
aCP
This can be used as a check.
Or
Thus all the angles and the sides have been found. Knowing the sides AP, BP and CP, the positions of the point P can be plotted.
Fig. 9˙26
Now
…(9˙9)

y180
z180
zy360
360zy
360360
sayx
The above solution is based on the assumption that the points B and P are on the opposite sides of AC. Sometimes, the points B and P occur on the same side of AC. Fig. 9˙26 shows the case when the point P is outside the triangle ABC. Fig. 9˙27 shows the case when the point P is within the triangle ABC.
In Fig. 9˙26,
And
Therefore,
But
Therefore,
Or
Knowing the values of α, β and x, the values of θ can be obtained from Eq. 9˙5.

2
1
180
180
21360
sayx360
In Fig. 9˙27,
Therefore,
Or
Knowing the values of x, α and β, the value of θ can be calculated from Eq. 9˙5.
Figure 9˙27

Illustrative Example 9˙2.
A, B and C are three signals on a coast line. The distance AB and BC are respectively 1340 m and 1520 m, and the included angle ABC is 112˚15′.
The sounding point P is in the sea. The angles APB and BPC measured with a sextant are respectively 40˚25′ and 48˚15′. The signal A is to the west of BP whereas the station C is to the east of BP. The point P is to the south of B. Calculate the distance AP, BP and CP.
)'1548'2540'15112(360
'5159
'5159
Solution: (Refer Fig. 9˙28)
Let the angles PAB and PCB be respectively θ and φ.
In the quadrilateral ABCP,
Or …(a)

Figure 9˙28

sin'2540sin
1340
sin812066BP
sin'1548sin
1520
sin382037BP
sin382037sin812066
sin01441sin
From the triangle ABP, BP
Or
From the triangle BPC, BP
Or
From Esq. (b) and (c),
Or
… (b)
… (c)

Substituting the value of φ from Eq.(a),
sin01441'5159sin
Or sin 159˚5′ cos θ − cos 159˚5′ sin θ = 1˙0144 sin θ
Or 0˙3570 cos θ + 0˙9341 sin θ = 1˙0144 sin θ
0˙3570 cos θ = 0˙0803 sin θ
Or tan θ = 4˙4458
Or θ = 77˚19′
φ = 159˚5′ − 77˚19′ = 81˚46′
Now angle ABP = 180˚ − (77˚19′ + 40˚25′) = 62˚16′
and angle CBP = 180˚ − (81˚46′ + 48˚15′) = 49˚59′

m382016'1977sin'25sin40
1340BP
m381829'1662sin'25sin40
1340AP
m341560'5949sin'15sin48
1520CP
Checkm382016'15sin48
'46811520sinBP
From the triangle ABP,
From the triangle CPB,

Illustrative Example 9˙3.
P.Q and R three visible stations in a hydrographic survey. The computed sides of the triangle PQR are : PQ = 1000 m, QR = 1300 m, and RP = 1900 m. Outside the triangle PQR and nearer to PR, a station X is established and its position is found by three-point resection P, Q and R, the angle PXQ and QXP being respectively 40˚ and 50˚. Find PX and RX.
(AMIE, 1975 Winter)
Solution: (See Fig. 9˙29)
Figure 9˙29

40θ180sin
sin40
PQsinPQX
sin40
PQPX
40θsin
sin40
1000PX
10001300
1000s1300s
2sin
21002
190013001000s
822753010001300
1100800
2sin
From the triangle PQX,
or
From the triangle PQR,
Where
Therefore,
… (a)

'22552
'44110
360
'16159'441105040360x
xsecsina
sinc1xcotcot
'16159sec
40sin1300
50sin10001'16159cotcot
049930
'5292
Or
Now
Or
From Eq. 9˙5,
Or
Or
Or

'2466'5292'16159x
'084740'5292180PQR
m251140'0847sin40sin
1000PX
'366350'2466180RQR
m051520'3663sin50sin
1300PX
Now
In the triangle PQX,
In the triangle RQX,

9˙18 GRAPHICAL SOLUTION OF THREE-POINT PROBLEM
The following three methods are commonly used to determine the location of point P graphically.
I Method
Let a, b and c be the plotted positions of the stations A, B and C (Fig. 9˙30). The sounding point p can be located by adopting the following procedure.
1. Join points a and c.
2. At point a, draw a line ad making an angle β with ac.
3. At point c, draw a line cd making an angle α with ac.

4. Draw a circle passing through the points a, b and c. The required point p lies on this circle.
5. Join the points d and b, and prolong the line db to meet the circle at the point p, which is the required point.
Proof: From the properties of a circle, as the angles apd and dca are made by the same chord ad,
dcaapd
daccpdLikewise,
Thus the angles at the point p are equal to the measured angles α and β.

Figure 9˙30

1. Let a, b and c be the plotted position of the stations A, B and C respectively.Join points a and b, and b and c (Fig. 9˙31).
2. From a, draw a line ao1 making an angle of (90˚– α) with ab. Similarly, from
b, draw a line bo1 making an angle of (90˚– α) with ba.
The point of intersection of two lines is o1.
3. With o1 as the centre, draw a circle marked I to pass through a and b.
4. From b, draw a line bo2 making an angle of (90˚– β) with bc. Also draw a
line co2 making an angle of (90˚– β) with cb.
The point of intersection of two lines is o2.
5. With o2 as the centre, draw a circle marked II to pass through b and c.
6. Determine the point of intersection b of the two circle, which is the required point p.
ao1b = 180˚ – (90˚– α) – (90˚– α)
II Method
Proof: In the triangle ao1b,
or ao1b = 2 α

Figure 9˙31
The angle apb subtended at the circumference is one-half the angle at the centre and equal to α.
In the same manner, it can be shown that the angle bpc is equal to β.

1. Join points a and b, and b and c (Fig. 9˙32).
2. At a and c, erect perpendiculars ad and ce, respectively.
Fig. 9˙32
III Method

3. At b, draw a line an angle of (90˚– α) with ba to meet the perpendicular ad at d.
4. Likewise, at b, draw a line be making an angle of (90˚– β) with bc to meet the perpendicular ce at e.
5. Join points d and e.
Draw a perpendicular from b on the line de. The foot of the perpendicular is the required point p.
Proof. Because angles bad and bpd are each equal to 90˚, the quadrilateral abpd is concyclic. Hence
Similarly, the quadrilateral cbpe is concyclic.
bec = bpc = β.
adb = apd = α

9˙19 DETERMINATION OF DIRECTION AND VELOCITY OF CURRENT BY FLOATS
In many engineering problems, the direction and velocity of water currents are required. The following methods are commonly used.
1. Surface Floats.
Surface floats are commonly used to measure the direction and velocity of water currents. The float should be light in weight and of such a shape that it offers least resistance to the floating bodies and eddy currents (Fig. 9˙33a). In order to make the float visible at a distance, a small flag of some bright colour is attached to its top. The float gives the direction of current. A weight is attached to the bottom of the float to keep it vertical.
For determining the velocity of the current, the distance traveled by the float is measured or computed and the time of travel is also found.

For locating the position of a float, the same methods can be used as used for the location of soundings. The following two methods are commonly used.
(a)
(b)(c)
Figure 9˙33

1. For fixing the position of a float at a particular instant, simultaneous
observations are made by two theodolites set over the shore control points.
The float is located from the two angles. For details, see Sect. 9˙20.
2. A boat is pulled up along side of the float. The position of the boat is then
located by measuring two angles to three shore-control stations with a nautical sextant. The boat (and hence float) is located from two
angles.The distance traveled by the float can be determined from the
starting position and the position after certain time t. The rate of drift, which is equal to the velocity of current, is then found.
Different floats with separate identification number or colour are released at intervals, and the velocity is determined.
In rivers and streams, the mean velocity is about 0˙85 to 0˙90 times the surface velocity given by the float. Because of the effects of wind and eddies, the results are not accurate.

2. Rod Float
A rod float is generally a cylindrical tube of copper or brass, about 3 cm diameter, and 2 to 6 m long (Fig. 9˙33 b). Sometimes, a wooden pole is used. A weight is attached at the lower end of the rod so that it floats in the upright position, with about 15 cm length projecting above the water surface. A small flag is attached at the upper end.
The length of the rod should be adjusted to clear any obstruction in the bed. The length of the rod is, therefore, kept about 0˙9 times the water depth.
The velocity of the current is obtained as discussed above for the surface float.
In river and streams, the rod float gives the velocity which is slightly greater than the mean velocity.

3. Subsurface Float
A subsurface float, also called a double float, consists of two floats,a surface float and a subsurface float. The subsurface float is slightly heavier that water, and it is suspended at known depth below the surface float. Generally, the subsurface float consists of a perforated cylinder, a kite or a canvas vane. Fig. 9˙33 (c) shows a kite subsurface float. The connecting cord is light and strong and can be adjusted to any desired length.
In rivers and channels, the length of the cord is adjusted so that the double float directly gives mean velocity. It gives better result than a surface float because it is not much affected by wind and surface eddies.

9˙20 LOCATION OF FLOATS WITH THEODOLITES
The floats can be located by the following two methods. In the first method, two theodolites are used, whereas the second method requires only one theodolite.
Let A and B be two stations on the shore, about 100 m apart (Fig. 9˙34). The base line AB is measured accurately.
Establish two parallel sections AC and BD. Set up the theodolites at stations A and B. Set the verniers at zero. The instrumentman at A sights C and the instrumentman at B sights D.
1. Two theodolite method.

Figure 9˙34

Release a float at a distance of about 50 m upstream of AC. As the float crosses the section AC, the instrumentman at A calls tick. Timekeeper notes the time and the instrumentman at B bisects the float at position G, and measured the angles GBF.
The instrumentman at A goes on following the float with the telescope till he listens ‘get ready’ from the instrumentman at B. He than clamps the upper plate and follows the float with the upper tangent screw. He takes the reading when the float is at F. The instrumentman at B calls ‘tick’, and the instrumentman at A measures the angles GAF.
The distance L between G and F is computed from the measured base AB and the angles GBF and GAF.

2. One Theodolite Method.
Let A and B be two stations on the shore about 200 m apart (Fig. 9˙35). Measure the distance AB accurately.
Establish two parallel sections AC and BD.
Set up the theodolite at the station E on the line AB. Sight the signal at A.
Release a float from a point about 50 m upstream of A. Measure the angle when α the float is at G on CA.
Unclamp the upper plate and swing the telescope to sight the signal at B.
Measure the angle β when the float is at point F on the section BD. Compute the length L between G and F as under.

say180
cosEFGE2EFGEGF 222
cosEFGE2EFGEL 22
secAEGE
secEBEF
In the triangle GEF, angle GEF
Now
Or
Where (from triangle AEG)
(from triangle BEF).
Figure 9˙35
and

Illustrative Example 9˙4.
Two cross-sections AB and CD each perpendicular to a base line AC, 200 m in length, are established for measuring velocity of water in a river. When the float was at the section AB and CD, the angles ACB and CAD were respectively 52˚40′20″ and 45˚50′20″. If the time taken by the float to travel the distance BD was 89 seconds, calculate the velocity of water.
Solution: (See Fig. 9˙36).
In the triangle ACB,AB = AC tan ACB
= 200 tan 52˚ 40′ 20″ = 262˙27 mIn the triangle ACD,
CD = 200 tan 45˚ 50′ 20″ = 205˙94 m

Let us assume that the origin of the coordinates is at B, and the line BA represents the meridian.
Therefore, bearing of AC = 90˚
And bearing of CD = 180˚
Latitude of BA = 262˙27 m
Departure of BA = 0˙00
Latitude of AC = 0˙00
Departure of AC = 200˙00 m
Latitude of CD = – 205˙94 m
Departure of CD = 0˙00
Total latitude of D = 262˙27 + 0˙00 – 205˙94 = 56˙94 m
Total departure of D = 0˙00 + 200˙00 + 0˙00 = 200˙00 m

Figure 9˙36
220000200003356BD
m78207
s/m33289
78207
Distance
Velocity of water

Illustrative Example 9˙5.
Two cross sections AB and CD each perpendicular to the base AC of 250 m length are established for measuring the velocity of flowing water in river. When the float was on the section AB, the angle AEB measured from a point E on the base line, 100 m from A, was 50˚30′40″, and the angle CED was 45˚35′20″. If the time taken by the float to travel the distance BD was 90 seconds, calculate the velocity of water.
Solution: (See Fig.9˙37).
In the triangle AEB, EB = 100 sec 50˚30′40″ = 157˙25 m
In the triangle CED, EB = 150 sec 45˚35′20″ = 214˙35 m
In triangle BED, angle BED = 180˚ – (50˚30′40″ + 45˚35′20″) = 83˚54′0″

Now (BD)2 = (ED)2 – 2BE × ED cos BED= (157˙25)2 + (214˙35)2 – 2 ×157˙25 × (214˙35) × 0˙1062641= 24727˙56 + 45945˙92 – 7163˙59
Or BD = 252˙01 m
Fig. 9˙37
90
01252= 2˙80 m/secVelocity of water =

9˙21 CURRENT METERThe velocity of water can be determined indirectly by means of a current
meter. It consists of a wheel with cups or vanes so constructed that the impact of flowing water causes the wheel to rotate. The greater the velocity, the greater is the speed of the wheel. The numbers of revolutions made by the wheel per second are indicated by some counting device.
The current meters can be classified into two types.
1. Those in which the revolving clement is cup-shaped.2. Those in which the revolving element is helicoidal or of the
propeller type.
In the first type, the most commonly used current meter is the Price meter and in the second type, Ott and Fteley meter.
A current meter should be of simple construction. Its all delicate parts should be properly protected. It should have a simple device for recording the number of revolutions. The shape of the rotating elements should be such that there is least possible resistance to flow of water. It should be adaptable for use in all types of open channels. It should be rugged and durable. The cleaning and replacement of parts should be convenient.

PRICE METER
The price meter is the most commonly used current meter. It consists of a horizontal wheel mounted on a vertical shaft (Fig. 9˙38). There are 6 conical cups fitted to the wheel. The vertical shaft turns upon a steel point in a conical bearing at the lower end. The upper end of the shaft is fitted with either a worm gear or an eccentric that passes into the cylindrical contact chamber. The contact chamber contains a mechanism which produces a click at each revolutions of the wheel. In some meters, there is an arrangement such that a click is produced every fifth revolution. There are used when the velocity is more than 2 m/sec. For high velocities, the human ear is unable to distinguish the separate click for each revolution.

ELECTRIC WIREROPE
VERTICAL STEM
TAIL
LEAD WEIGHT
WORM GEAR
YOKEWHEELWITH BUCKETS
Figure 9˙38

The wheel and shaft are carried by a yoke which holds the wheel in position. To the other side of the yoke, a tail vane is attached to hold the meter heading into the current. There is a vertical stem at the top of the yoke to support the weight of the current meter and to supply a connection to the cable by which the meter is suspended. A heavy lead weight is suspended at the bottom of the yoke to keep the instrument in the upright position. The tail vane balances the instrument so that instrument so that the cups always face the current.
Several methods for counting the revolutions of the wheel are used. In some metres, there is an arrangement so that the electric contact is made at each revolution and the number of revolutions is counted from the number of bells activated by electric contact. For prolonged observations and in high velocity water, there is an electrical registration system which records the number of revolutions on a dial kept above the water surface. For small velocities, a headphone is used to count the number of revolutions.

The instrument is suspended with a graduated wire or a rope so that the depth of the current meter can be found. The meter may be supported on a rod. The meter is suspended from the end of the rod and the rod is held in hand or clamped to some support. Sometimes, the meter is clamped to an upright graduated rod so that the meter can slide up or down the rod.
For deep waters, a cable is used for suspending the meter from an overhead cable-way or bridge. The cable is also used for suspending the meter when it is used from a boat.
After the meter has been properly lowered to a point where the velocity is required, the numbers of revolutions made by the wheel are counted. The velocity of the current is determined from the calibration chart or a standard rating table supplied by the manufacturer. If the chart is not available, rating of the current meter is done as explained below.

Rating a current meter.
The object of rating of a current meter is to obtain a calibration chart between the velocity of current and the number of revolutions per second. The most common method of rating is to tow the meter through a body of still water at known velocities and to count the number of revolutions of the wheels per seconds for different velocities.
The meter is attached to a small car which is driven along a level track laid on one side of the rating flume. The rating can also be done by suspending the meter from a propelled boat. The car method is preferred because the boat causes water disturbances.

Various runs are made of the car at different speeds, and the corresponding numbers of revolutions per second are recorded. A plot is made between the velocity and the number of revolutions per second. The rating curve is a straight line. The equation of the rating curve is (Fig. 9˙39),
baNV
Where V = velocity (m/sec) N = revolutions per second
a and b are constants.
In some current meters, the constant b is equal to zero.
The rating curve obtained may be used to determine the velocity (V) corresponding to the observed revolutions per second in the field.

Figure 9˙39

60
100
sec/m33360
1002V
Illustrative Example 9˙6.
A current meter has the rating curve represented by the equation V = 2N, where V is the velocity in m/sec and N is the number of revolutions per second.
Determine the velocity at a point in the river if the number of revolutions per minutes as counted by the headphone is 100.
Velocity,
Solution :
Number of revolutions per second =

9˙22 STREAM GAUGINGStream gauging is the process of measuring the discharge of a stream. The
volumetric computation of water can be made from the continuous record of the rate of discharge. The record of the rate of discharge is used to estimate the character of the flow in the stream. It is also used for estimating the quantity of water that may be expected on each day, month or year. These data are useful for the design of various engineering projects such as those for water supply, irrigation, flood control, water power, culverts, bridge, sewage disposal works.
The following methods are commonly used.
1. Slope method2. Weir method3. Velocity-area method4. Salt-velocity method5. Salf-dilution method.
The slope method is discussed in this section. The other methods are described in the following sections.

Slope Method of Measuring Stream Flow
In this method, a straight reach of the river with uniform slope and cross-section is selected. The difference in levels of the water surface at the two ends of the each is determined. Hook gauges are used to determine the water levels. For best results, observations of the water level should be made on each shore, and the mean should be taken as the water level at that section.
The area of cross-section of the river is obtained by sounding. A number of cross-sections are obtained to get an average value of the area of cross-section and the wetted perimeter. The hydraulic radius is obtained from the area of cross-section and the wetted perimeter.
A proper value of the rugosity coefficient (N) is selected, depending upon the cannel conditions.

2/13/2 SRN
1V
ASRN
1Q 2/13/2
)P(perimeterwetted
)A(tionseccrossofarea
L
h
RSCV
The velocity is obtained from Manning’s formula
The discharge is given by
Where R = Hydraulic radius
S = water surface slope
Where h = difference of water levels at the end sections L = length of the reach.
The velocity can also be determined by Chezy’s formula
where C is Chezy’s coefficient.
…(9˙10)

The method is approximate because it is extremely difficult to secure suitable conditions of flow and to measure the slope accurately. Moreover, it is difficult to assign a proper value of rugosity coefficient N or Chezy’s C.
The method is commonly used to estimate the approximate flood discharge from the high-water marks left after the flood. These marks are used for the determination of the water surface slope, area of cross-sections (A) and the wetted perimeter (P).

9˙23 WEIR METHOD OF MEASURING FLOW
A weir or notch is an opening at the top of a structure through which water flows. The notches are usually rectangular in shape (Fig. 9˙40). The horizontal lower edge is called crest. The upper surface of water is free. The crest is thin so that the following water will have only a line contact. The weir is, therefore, called sharp-crested weir.
The head over the crest is determined by means of a hook gauge. The free water surface is drawn down as it passes over the weir. The head (H) over the crest should be measured at a distance of 3 H to 5 H upstream of the weir.

END CONTRACTION
PLAN
ELEVATION
H
Figure 9˙40

2/3H'b831Q
2/3d gH2'bC
3
2Q
The discharge is usually determined from the Francis Formula.
Where b′ = effective width of crestH = head over the crest
Alternatively, it is determined from the formula,
Where Cd = coefficient of discharge ( ~ 0˙60)
…(9˙11)
…(9˙12)
…(9˙13)
When the vertical edges of the notch are at some distance from the sides of the cannel of approach, the sheet of water passing around the ends of the notch has the ends contracted. The weir is said to have end contractions. In that case, the effective width is given by
b′ = b − 0˙1 nH
Where b = total width and H is the head over the crest.n = number of end contractions (= 2 for one pier).

2/3a
2/311 HHnH10b831Q
g2
V 2a
However, when the notch extends to the whole width of the cannel and the edges of the notch coincide with the sides of the feeding channel, the notch has no end contraction and it is called a suppressed notch. In that case, b′ = b.
Sometimes, the head over the crest is measured with a float gauge, and a continuous record of the head is maintained.
If the velocity of approach is significant, it may be taken into account by modifying the formula as
Where Ha = velocity of approach head
H1 = H + Ha
And Va = velocity of approach
…(9˙14)

Triangular Notch
2/5d H2tang2C
15
8Q
In the triangular notch, the discharge is given by
Where θ is the apex angle, g is the acceleration due to gravity (= 9˙81 m/sec2) and Cd is the coefficient of discharge ( ~ 0˙60).
…(9˙15)

Dams as weirs
An overflow dam can be used as a weir for measuring the discharge if it is of sufficient height so that backwater below the dam does not interfere with free-flow over it. The crest should be level. The dam acts as a broad-crested rectangular weir, and the discharge is given by
2/3CbHQ
where the value of the coefficient C depends upon the shape of the crest.
…(9˙16)

9˙24 VELOCITY-AREA METHOD OF MEASURING FLOW
This method is most commonly used for measuring discharge in rivers and in artificial channels. In this method, the cross-section of the river is determined by ordinary surveying methods, and the mean velocity at that cross-section is determined by a current meter. The cross-section on which above measurements are taken is called the measuring section.
The cross-section where the water-gauge is located is known as the gauging section. The gauging section must be located at a point upstream of a control section. A control section is the cross-section which controls the water-level in the river where the gauge is located. The gauging section is located at the pool created by the control section.

A control section may be natural or artificial. A natural control section may be sand or gravel bar in the river which restricts the flow. It many be a stretch of large boulders or a ledge outcrop that extends across the width and restricts the flow. An artificial control may be dam, a measuring weir or a bridge with piers which restricts the flow of the stream. The main function of the control section is that it stabilizes the relationship between gauge (water- surface level) and discharge. The float gauge and the stilling well are connected by a pipe with the pool on the upstream of the control section. On the upstream of the control section, the water surface has a relatively smooth appearance whereas on the downstream, there are eddies and the flow is much more turbulent.
The measuring section should be selected so that the discharge at this section is the same as that on the gauging section. It may be at the same site as the gauging section, but not necessarily so. Generally, it is on the upstream or downstream of the gauging section, within a distance of 300 m. the river should have a straight reach for a distance of 100 to 200 m on the upstream and on downstream of the measuring section.

While selecting the gauge section, the following points should be kept in view
1. The river is regular in shape and is straight up-and down-stream of the section.
2. The river should be free of obstructions.3. The flow is smooth because the eddy currents affect the accuracy of the
current meter.4. The bed of the river should be fairy uniform in shape and character.5. It should be located near the gauge section.6. The gauge section must be located on the upstream of the control section.
The cross-section of the river is determined by soundings. The width of the river is divided into vertical strips of equal width. These strips are also known as the segments. If the width of the river is small, a graduated rope or wire is pulled taut across the section and the section is divided into equal segments. Fig. 9˙41 shows the cross-section of a river divided into segments of width x.

2
VVV d80d20
The velocity at any section varies from the top to the bottom. However, the variation of velocity in the cross-section follows a well-defined distribution. The mean velocity at any section can be determined by measuring the velocity at one or two depths on that section. The mean velocity (V) is the average of the velocities at 0˙2 times depth and 0˙8 times depth measured from the water surface. Thus
, where d is the depth of water
Figure 9˙41

d60VV
tionsecthatatDepth
curvetheofAreaV
.......VAVAQ 2211
The mean velocity is also equal to the velocity at 0˙6 times depth (d) from the water-surface. Thus
If a very accurate value of the mean velocity is required, the velocity is measured at various depths and a velocity-distribution curve is plotted as shown in Fig 9˙41. The area of the curve is determined by a planimeter. The mean velocity (V) is then obtained as
The current meter is held at the required depth along the vertical centre line of each segment, and the mean velocity at each centre line section is determined. The discharge in a particular segment is equal to the area of the segment multiplied by the mean velocity. The total discharge in the river is, of course, equal to the sum of discharges in all segments. Thus

Mean Velocity from Floats
When a current meter is not available, the mean velocity can also be obtained from floats. As the surface floats give the velocity of currents at the water surface, the mean velocity is usually taken as 0˙85 to 0˙9 times the surface velocity. Rod floats give the mean velocity. In kite sub-surface floats, if the kite is at 0˙6 times depth, it also gives the mean velocity directly.
Once the mean velocity has been determined, the discharge can be determined as in the case of a current meter

9˙25 SALT-VELOCITY METHOD
In this method, a chemical (salt) is introduced into the river and the discharge is determined indirectly from the concentration of the chemical at various sections. When salt solution is introduced, it increases the electrical conductivity of water. Two sets of electrodes are kept at a known distance apart in the river, one set is on the upstream end of the reach and the other at the downstream end. These electrodes are connected to a recording instrument, which is generally a galvanometer, that records the changes in electrical conductivity of the river water with respect to time.
Under normal conditions of flow when there is no salt, the graph between conductivity and time is more or less horizontal. When a salt solution is introduced into the river on the upstream of the electrodes, the first set of the electrodes shows a sudden jump in the graph. Later on, after sometimes, when the salt solution reaches the second set of electrodes, a jump occurs in the graph. The time of transit is equal to the time between the centres of the areas of two jumps. Dividing this time into the volume of water between two stations, the discharge can be determined.

9˙26 SALT-DILUTION METHOD
In this method, a salt solution of known concentration is added at a point into the river at a constant rate. By analysis, the subsequent dilution of the solution is determined.
The salt solution mixes with the river water. The samples of water are taken far enough downstream below the entry point for complete mixing. The weight of salt per second that passes at the downstream section where samples are taken must be equal to the combined weights of the salt normally present and the salt added in the solution. Thus,
wp + w′ p′ = (w + w′) p″ … (a)

Where w = weight of water discharge per second ( = γQ)
p = percentage of salt normally present in the stream
w′ = weight of salt solution added per second
p′ = percentage of salt in the salt solution
p″ = percentage of the salt in the sample after mixing

… (9˙17) p"p
"p'p'ww
From Eq. (a),
The value of p″ must be uniform at all points in the cross-section for accurate results. The salt used should be stable in water. Generally, sodium dichromate is used, with a concentration of 5 ppm. The concentration above 30 ppm should not be used as it may kill fish.
If sodium chloride is used, it would be needed in large quantities as it is also present in natural water. In this case, p should not be grater than 0˙15 p″ for accurate results.
The method is used for approximate determination of discharge in turbulent, mountain streams where other methods are not convenient to use.

Illustrative Example 9˙7
A stream cross-section is divided into 5 equal segments of 6 m wide. The average depths of the 5 segments were 4 m, 6 m, 7 m, 6 m and 4 m. A current meter was used to determine the velocity in various segments, and the following results were obtained.
1˙30 m/s 1˙40 1˙10
− − −
1˙40 m/s 1˙70 1˙30 1˙20 1˙10 −
1˙40 m/s 1˙85 1˙65 1˙25 0˙90 0˙80
1˙40 m/s 1˙85 1˙65 1˙20 1˙00
−
1˙20 m/s 1˙40 1˙10
− − −
123456
Segment(5)
Segment(4)
Segment(3)
Segment(2)
Segment(1)
Depth(m)

Determine the discharge.
Figure 9˙42

3
10140120146Q1
cumecs6029
5
00120165185140166Q2
cumecs1251
6
80090025165185140176Q3
cumecs9554
Solution : (See Fig. 9˙42). The mean velocity is taken as the arithmetic average.
Discharge in II segment,
Discharge in 1st segment,
Discharge in III segment,

5
10120130170140166Q 4
cumecs2448
3
10140130146Q5
cumecs4030
40302548955412516029Q
cumecs32214
Discharge in IV segment,
Discharge in V segments,
Total discharge,

ADDITIONAL EXAMPLE
Illustrative Example 9˙8
The following observations were made from two stations A and B on the shore to a sounding boat at C.
Angle ABC = 25˚ 25′ Angle BAC = 45˚ 20′Distance AB = 5 km
The true bearing of the line AB was 50˚ 25′. Calculate the coordinates of C if the coordinates of A are (100 m, 1000 m).
Also determine the perpendicular distance of AB from C.

Solution : (See Fig. 9˙43)
Figure 9˙43

' 15 25sin
AC
' 20 45sin
BC
' 25 109sin
5000
m493770BC
m462261AC AndBearing of AC = 50˚ 25′ + 45˚ 20′ = 95˚ 45′
Latitude of AC = 2261˙46 cos 95˚ 45′ = −226˙57 m
Departure of AC = 2261˙46 sin 95˚ 45′ = +2250˙08 m
X-coordinates of C = 1000 + 2250˙08 = 3250˙08 m
Y-coordinates of C = 1000 + (−226˙57) = 773˙43 m
Perpendicular distance CD = AC sin 45˚ 20′ = 1608˙37 m
Check : CD = BC sin 25˚ 15′ = 1608˙37 (O.K)
Angle ACB = 180˚− (25˚ 15′ + 45˚ 20′) = 109˚ 25′
In the triangle ABC,

Illustrative Example 9˙9
A, B and C are three stations on a coast line used to fix the position of a bore hole P being put down off shore. Find the coordinates of P if APB and
are measured as 35˚ 24′ and 38˚ 36′, respectively. The coordinates of the stations are :
Station N E A 600 200 B 700 500 C 650 850
Graphical method is acceptable. Full credit shall be given for accurate answer.
(A.M.I.E., Summer 1979)
BPC

Figure 9˙44

22 200500600700
m233169000010000
22 650700500850
m55353
m92651600650200850 22
Solution: The analytical solution is given below (Fig. 9˙44)
Distance AC
Let the angles PAB and PCB be respectively θ and ø. Let the angle ABC be γ.
θ + φ = 360˚ − (γ + 35˚ 24′ +38˚ 36′)
Distance AB
Distance BC

55353233162
926515535323316222
55353233162
425000125000100000
'26 153γ
'34 132'36 38'24 35'26 153 360
'34 132
sin90545sin'24 35sin
23316
sin70566sin'36 38sin
55353
In triangle ABC,
or
or
From the triangle CBP, BP
cos ABC
From the triangle ABP, BP
… (a)

sin70566sin90545
'34 132sin70566sin90545
sin'34 132coscos'34 132sinsin96329630
sin67644760cos73649080
56752362tan
'43 68
'51 63'43 68'34 132
m67508'43 68sin'24 35sin
23316
m69508'51 63sin'36 38sin
55353
Equating the two values of BP,
Or
From the triangle ABP, BP
From the triangle CBP, BP
(check)
Substituting the value of φ from Eq. (a),

'53 75'43 68'24 35 180ABP
m41529'53 sin75'24 sin35
23316AP
600700
200500tan
'34 71
From the triangle ABP,
The bearing of line AB is given by
Bearing of AP = 71˚ 34′ + 68˚ 43′ = 140˚ 17′
Latitude of AP = 529˙41 cos 140˚ 17′ = − 407˙23 m
Departure of AP = 529˙41 sin 140˚ 17′ = + 338˙29 m
Coordinates of P N = 600 − 407˙23 = 192˙77 m
E = 200 + 338˙29 = 538˙29 m

'27 102 180'36 38'51 63 180CBP
'33 77
m37553'33 sin77'36 sin38
55353CP
360'24 35'36 38180'17 140
'17 34
Check: From the triangle CBP,
Bearing of PC
Latitude of PC = 553˙37 cos 34˚ 17′ = 457˙23 m
Departure of PC = 529˙41 sin 34˚ 17′ = 311˙71m
Coordinates of C , N = 192˙77 + 407˙23 = 650 m
and E = 538˙29 + 311˙71 = 850˙00 m (O.K)

2/3H'b831Q
cumecs6949269831 2/3
Illustrative Example 9˙10.
In a rectangular weir, the width of the crest is 10 m, and the head over the crest is 2 m. Determine the discharge if there are two end contractions. Use Francis Formula.
Solution:
From Eq. 9˙13, effective width b′ = 10 − 0˙2 × 2 = 9˙6 m
From Eq. 9˙11, the discharge is given by

2/5d H2tang2C
15
8Q
2/54018192600
15
8
cumecs1430
Illustrative Example 9˙11.
In a right-angled, triangular notch the head over the crest is 0˙4 m. Determine the discharge if Cd = 0˙60.
From Eq. 9˙16, taking θ = 90˚

m333120
400
m0080150
21
40000803330250
1 21
32
4000894023120250
1
cumecs223192
In a stream, the following observations were made.
Cross-sectional area = 400 m2
Wetted perimeter = 120 mDifference of water levels at the two ends = 1˙2 m
If Manning’s rugosity coefficient is 0˙025, determine the discharger.
Slope
From Eq.9˙10, Discharge
Solution: Hydraulic radius
Illustrative Example 9˙12.