
Hydrabot The Modular Electro-Hydraulic Robot Arm Abed Alnaif Group 3 4A Mechatronics Engineering...
20
Hydrabot The Modular Electro- Hydraulic Robot Arm Abed Alnaif Group 3 4A Mechatronics Engineering University of Waterloo November 17, 2008
-
Upload
kory-palmer -
Category
Documents
-
view
214 -
download
0
Transcript of Hydrabot The Modular Electro-Hydraulic Robot Arm Abed Alnaif Group 3 4A Mechatronics Engineering...

HydrabotThe Modular
Electro-Hydraulic Robot Arm
Abed AlnaifGroup 3
4A Mechatronics EngineeringUniversity of WaterlooNovember 17, 2008
Introduction• Modular Robot Arms
o Flexibility in length and shape of robot arm
o Currently use electrical actuators• Limitations on number of modules and
payload
• Needs Assessment:oModular robot with greater payload
and lesser limitations on number of modules
2Modular Electro-Hydraulic Robot Arm
Goals & Objectives
• Goals:o 2 modules builto Simple control algorithm developed
• Objectives:o Should perform better than currently available
modular robots in at least one of these categories:oCosto SizeoPayload
3Modular Electro-Hydraulic Robot Arm
Constraints & Criteria
• Constraints:o $1500 / moduleo Should support at least 15 modules
• Criteria:o Sizeo Load Capabilitieso Controllability (ease and accuracy of control)
4Modular Electro-Hydraulic Robot Arm

Idea: Use Hydraulic Actuators• Advantages of hydraulics:
o High power-to-weight ratio• Powerpack can be located on the ground
o Actuator stiffness due to incompressible oil
• Disadvantages of hydraulics:o Need to use valveso Oil leakso Nonlinear controlo Noisy
5Modular Electro-Hydraulic Robot Arm
Design Overview: Design Methodology
• Design methodology, in chronological order:1. Choose type of actuator2. Choose sensor3. Choose valve4. Design structure
6Modular Electro-Hydraulic Robot Arm
Design Overview: Actuator Selection
• Hydrostatic (no actuators)o Very cheapo Difficult to control (no stiffness)
7Modular Electro-Hydraulic Robot Arm
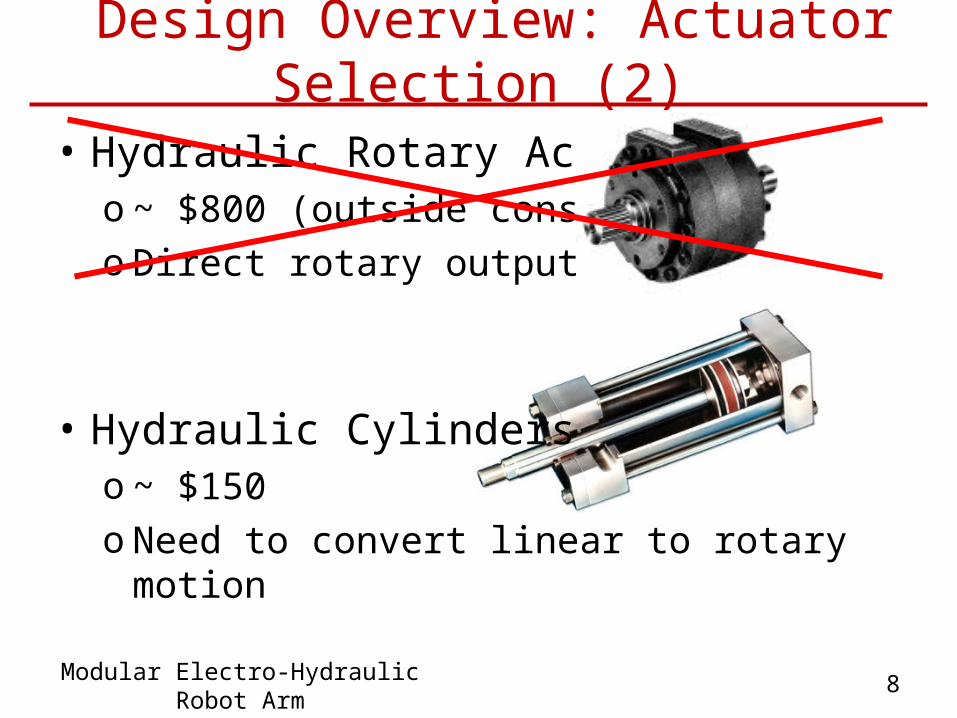
Design Overview: Actuator Selection (2)
• Hydraulic Rotary Actuatorso ~ $800 (outside constraints)o Direct rotary output
• Hydraulic Cylinderso ~ $150o Need to convert linear to rotary motion
8Modular Electro-Hydraulic Robot Arm
Design Overview: Sensor Selection
• Two ways of sensing module positionsoMeasure piston position• Off-the shelf• Very expensive ( ~ $700 )
o Rotary potentiometer• Cheap
9Modular Electro-Hydraulic Robot Arm

Design Overview: Valve Selection
• Directional valveo Controls direction of flow only (not magnitude of
flow)
10Modular Electro-Hydraulic Robot Arm
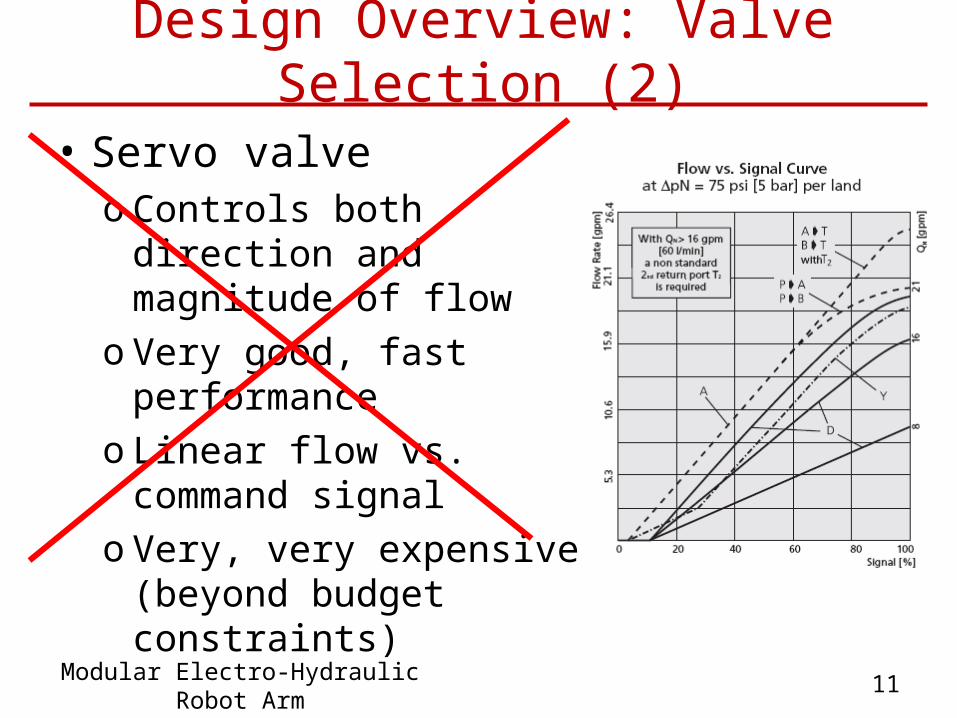
Design Overview: Valve Selection (2)
• Servo valveo Controls both direction and
magnitude of flowo Very good, fast performanceo Linear flow vs. command
signalo Very, very expensive (beyond
budget constraints)
11Modular Electro-Hydraulic Robot Arm
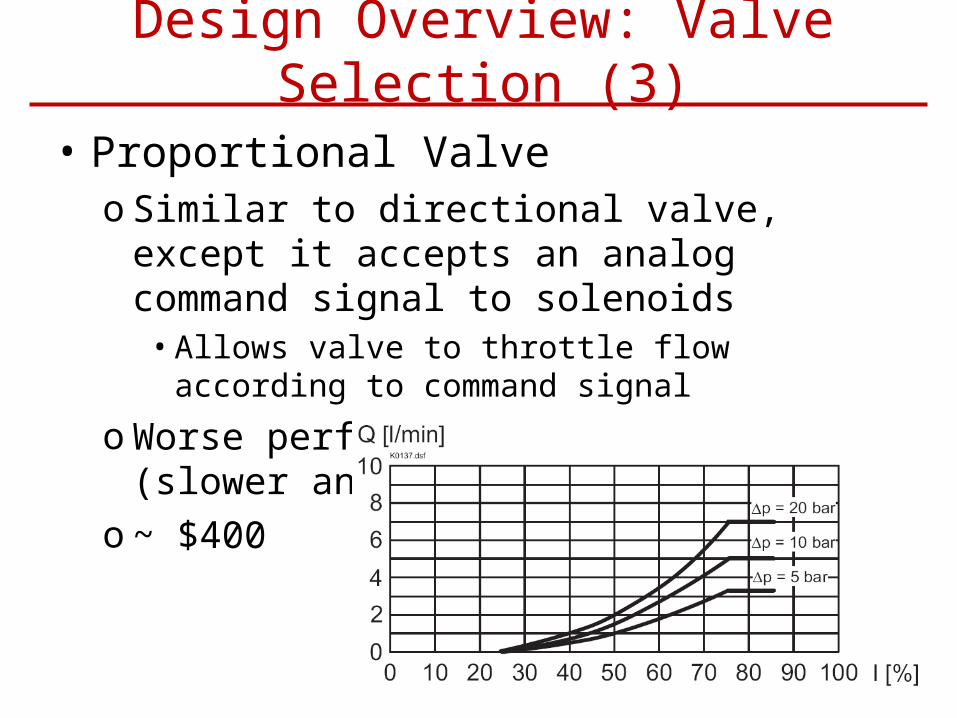
Design Overview: Valve Selection (3)
• Proportional Valveo Similar to directional valve, except it accepts an
analog command signal to solenoids• Allows valve to throttle flow according to command
signaloWorse performance than servo valve (slower and
nonlinear)o ~ $400
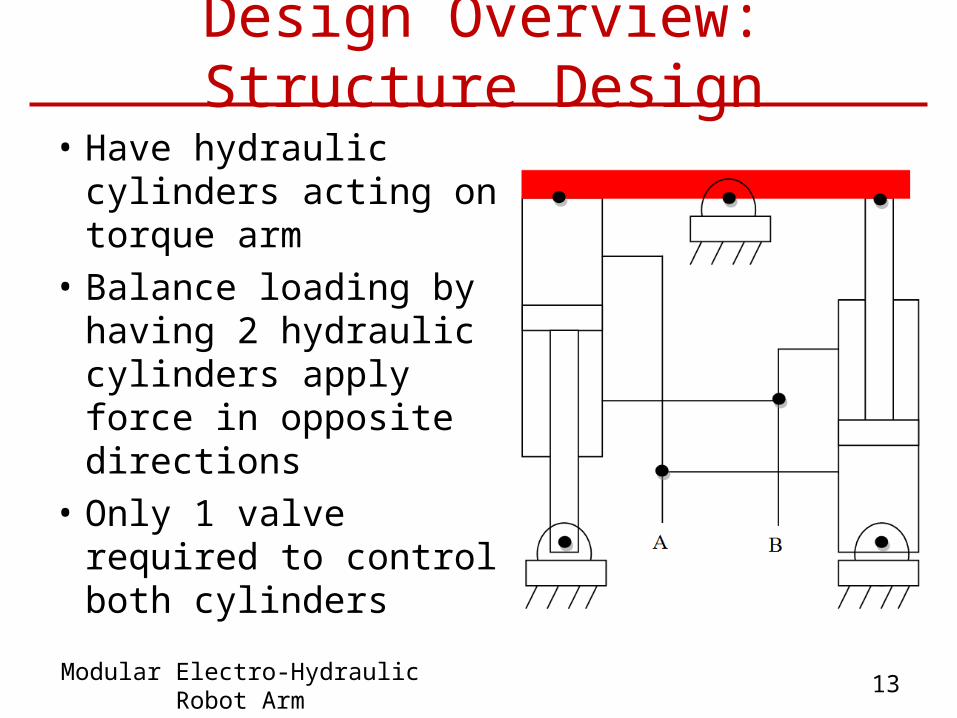
Design Overview: Structure Design
• Have hydraulic cylinders acting on torque arm
• Balance loading by having 2 hydraulic cylinders apply force in opposite directions
• Only 1 valve required to control both cylinders
13Modular Electro-Hydraulic Robot Arm
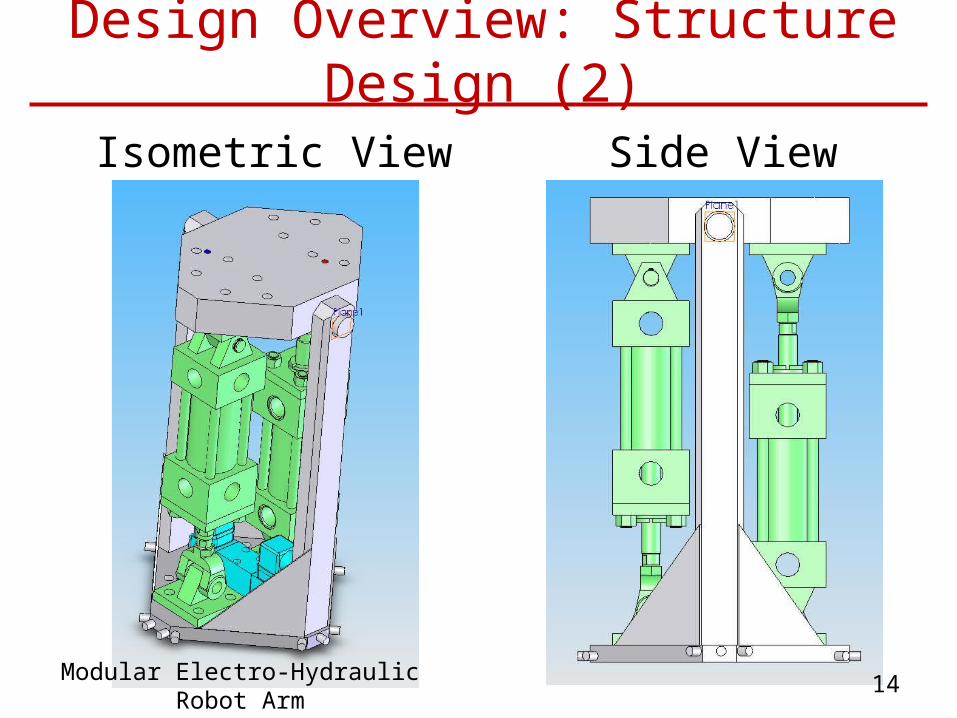
Design Overview: Structure Design (2)
Isometric View Side View
14Modular Electro-Hydraulic Robot Arm
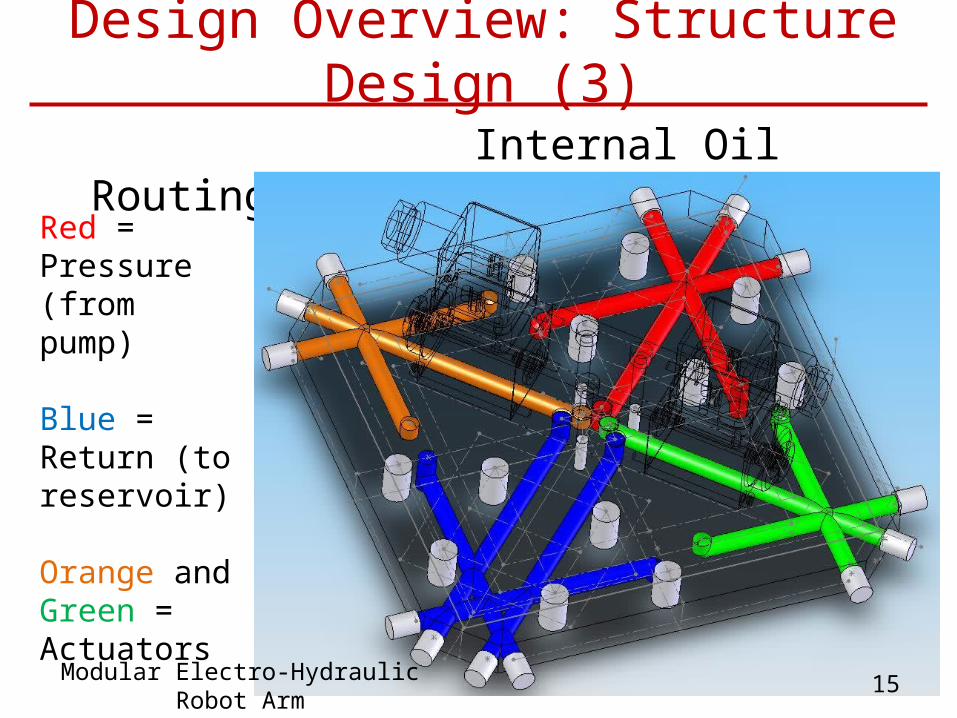
Design Overview: Structure Design (3)
Internal Oil Routing
Red = Pressure (from pump)
Blue = Return (to reservoir)
Orange and Green = Actuators
15Modular Electro-Hydraulic Robot Arm

Design Specifications
• Dimensions: 206x386 mm
• Weight: 6.6 kg
• Torque (at 45° rotation and with cylinders pulling): 1657 N-m
• Max number of modules: 11.4
386 mm
206 mm
16Modular Electro-Hydraulic Robot Arm
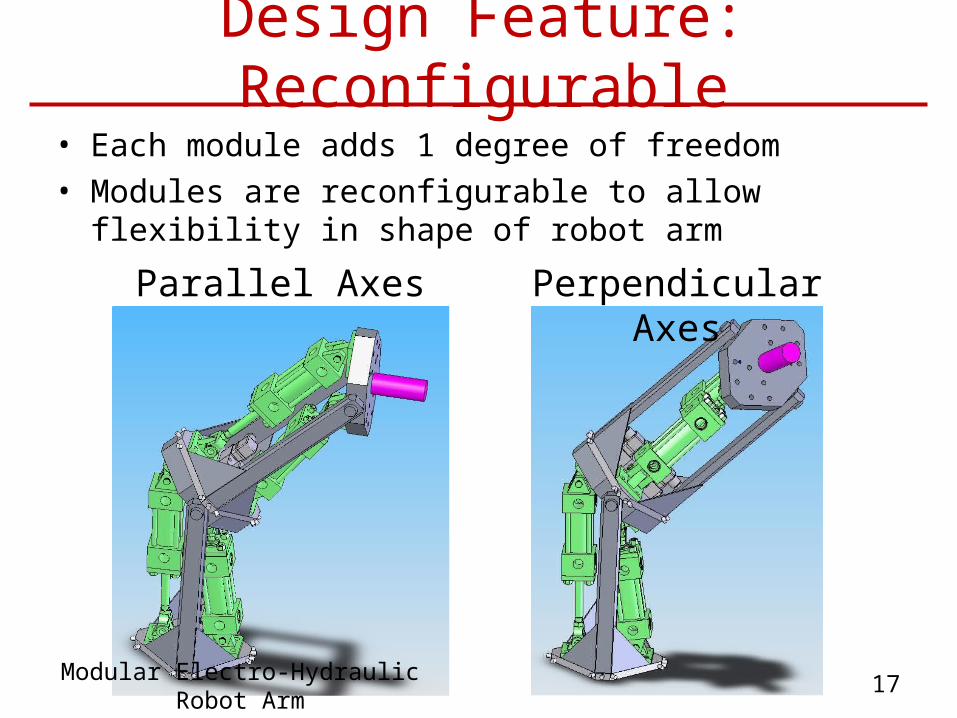
Design Feature: Reconfigurable• Each module adds 1 degree of freedom• Modules are reconfigurable to allow flexibility in shape of
robot arm
Parallel Axes Perpendicular Axes
17Modular Electro-Hydraulic Robot Arm

Design AssessmentCategory Hydrabot Amtec
PowerCubeMeets Project
Constraints?Cost $1500 Much less YesSize 206 x 386 mm 90 x 220 mm Yes
Weight 6.6 kg 5.6 kg YesTorque 1657 N-m 142 N-m Yes
Max # of modules
11.4 4.8 Yes
Amtec PowerCube
servo-motor and gear box: 18Modular Electro-Hydraulic Robot Arm
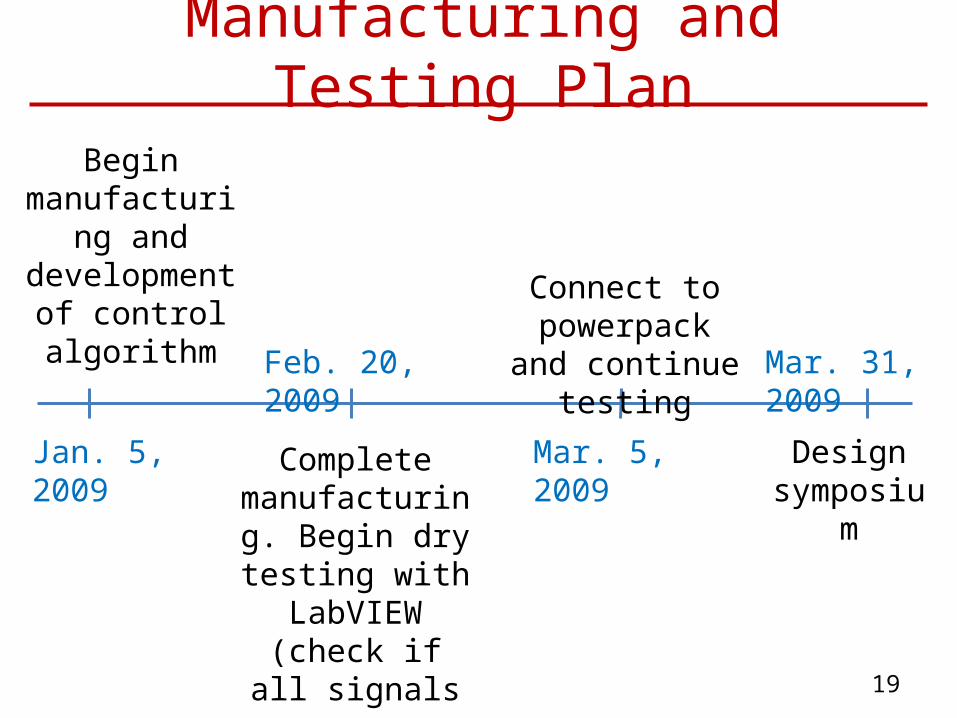
Manufacturing and Testing Plan
Jan. 5, 2009
Begin manufacturing
and development of
control algorithm Feb. 20, 2009
Complete manufacturing.
Begin dry testing with LabVIEW
(check if all signals are as expected)
Mar. 5, 2009
Connect to powerpack and continue testing Mar. 31, 2009
Design symposium
19
The Possibilities…
Questions?
20Modular Electro-Hydraulic Robot Arm
![Work Term Report Common Errors - Home | University …1] University of Waterloo Faculty of Engineering, Department of Mechanical and Mechatronics Engineering, "Work Report Guidelines](https://static.fdocuments.in/doc/165x107/5ab9bc9b7f8b9aa6018e34b1/work-term-report-common-errors-home-university-1-university-of-waterloo.jpg)

















