Historia de Polines
25
HISTORIA El transporte de material mediante cintas transportadoras, data de aproximadamente el año 1795. La mayoría de estas tempranas instalaciones se realizaban sobre terrenos relativamente plano, así como en cortas distancias. El primer sistema de cinta transportadora era muy primitivo y consistía en leather, canvas, or rubber belt traveling over a flat or troughed wooden bed. Este tipo de sistema no fue calificado como exitoso, pero provoco incentivar a los ingenieros para considerar los transportadores como un rápido, económico y seguro método para mover grandes volúmenes de material de una locación a otra. Durante los años �20, la instalación de la compaña H. C. Frick, demuestra que los transportadores de cinta pueden trabajar sin ningún problema en largas distancias. esta instalación se realizó bajo tierra, desde una mina recorriendo casi 8 kilómetros. La cinta transportadora consistía de múltiples pliegues de algodón de pato con cubierta de goma natural, que eran los únicos materiales utilizados en esos tiempos para su fabricación. Although outmoded by today's standards, los sistemas de manejo de estos materiales son seleccionados de preferencia para trabajo pesado, lo cual permite realizar una mejor elección. Durante la Segunda Guerra Mundial, los componentes naturales de los transportadores se volvieron muy escasos, permitiendo que la industria de goma se volcara a crear materiales sintéticos que reemplazaran a los naturales. La ventaja básica de los transportadores de cinta sobre otros
-
Upload
jorge-munoz-silva -
Category
Documents
-
view
74 -
download
0
Transcript of Historia de Polines

HISTORIA
El transporte de material mediante cintas transportadoras, data de aproximadamente el año 1795. La mayoría de estas tempranas instalaciones se realizaban sobre terrenos relativamente plano, así como en cortas distancias.
El primer sistema de cinta
transportadora era muy primitivo y
consistía en leather, canvas, or rubber
belt traveling over a flat or troughed
wooden bed. Este tipo de sistema no fue
calificado como exitoso, pero provoco
incentivar a los ingenieros para
considerar los transportadores como un
rápido, económico y seguro método para
mover grandes volúmenes de material de
una locación a otra.
Durante los años �20, la instalación de la compaña H.
C. Frick, demuestra que los transportadores de cinta pueden
trabajar sin ningún problema en largas distancias. esta
instalación se realizó bajo tierra, desde una mina
recorriendo casi 8 kilómetros. La cinta transportadora
consistía de múltiples pliegues de algodón de pato con
cubierta de goma natural, que eran los únicos materiales
utilizados en esos tiempos para su fabricación. Although
outmoded by today's standards, los sistemas de manejo de
estos materiales son seleccionados de preferencia para
trabajo pesado, lo cual permite realizar una mejor elección.
Durante la Segunda Guerra Mundial, los componentes
naturales de los transportadores se volvieron muy escasos,
permitiendo que la industria de goma se volcara a crear
materiales sintéticos que reemplazaran a los naturales. La
ventaja básica de los transportadores de cinta sobre otros
tipos de transporte (como lo son camiones, trenes, transporte
aéreo, etc.) es su variada aplicabilidad a los diferentes
requerimientos de la industria. Diferentes estudios indican
que hoy, los transportadores de cinta se han convertido en el
primer método utilizado para el transporte de material.
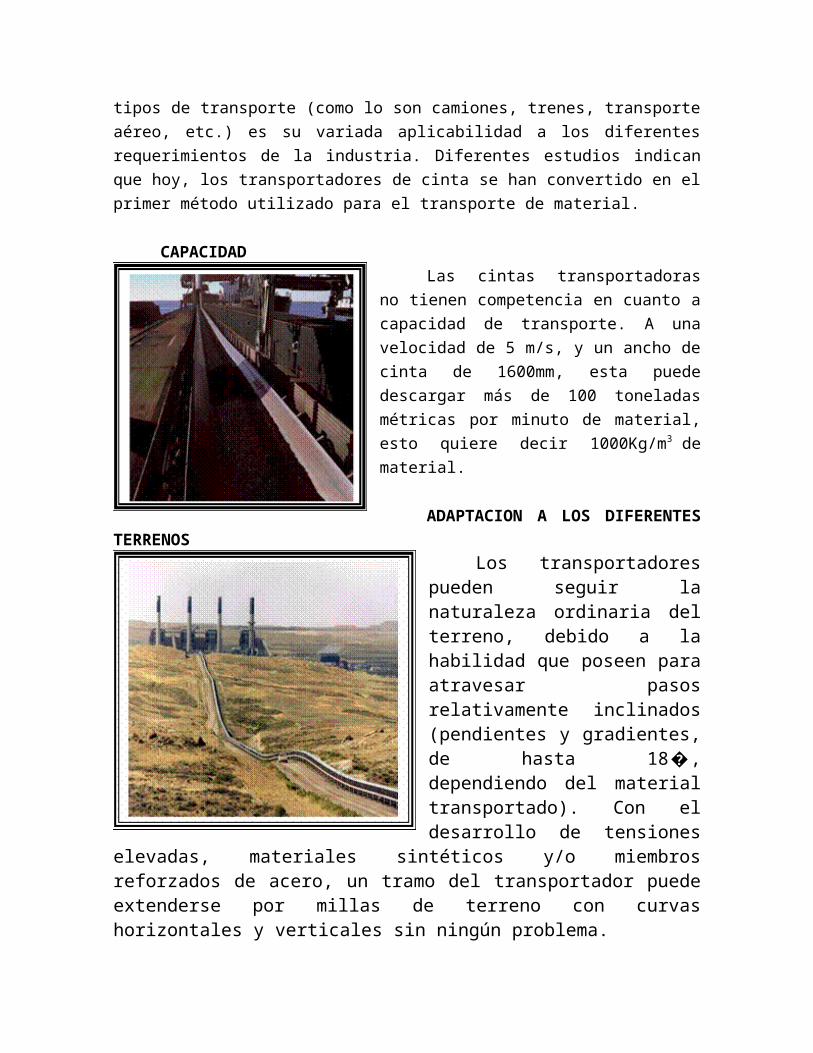
CAPACIDAD
Las cintas transportadoras
no tienen competencia en cuanto a
capacidad de transporte. A una
velocidad de 5 m/s, y un ancho de
cinta de 1600mm, esta puede
descargar más de 100 toneladas
métricas por minuto de material,
esto quiere decir 1000Kg/m3 de
material.
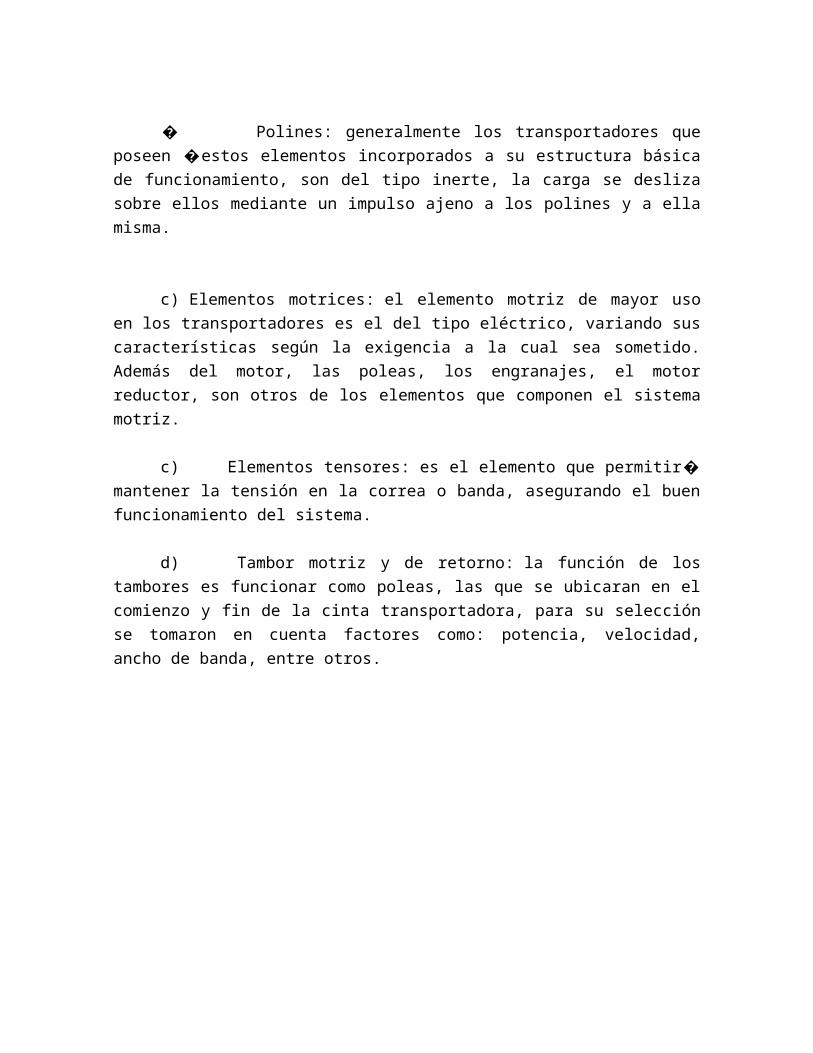
ADAPTACION A LOS DIFERENTES
TERRENOS
Los transportadores pueden seguir la naturaleza ordinaria del terreno, debido a la habilidad que poseen para atravesar pasos relativamente inclinados (pendientes y gradientes, de hasta 18�, dependiendo del material transportado). Con el desarrollo de tensiones
elevadas, materiales sintéticos y/o miembros reforzados de acero, un tramo del transportador puede extenderse por millas de terreno con curvas horizontales y verticales sin ningún problema.

UNA CAMA DE CAMINO
El sistema de transportadores de cintas opera en su propia cama de rodillos, los cuales requieren un minimo de atención. Su reparación o reemplazo, es simple y fácil, y el costo de su mantención rutinaria es mínimo.
BAJO PESO DE LA ESTRUCTURA DEL
TRANSPORTADOR
El bajo peso de carga y de la estructura del transportador
por metro lineal se consigue con un diseño estructural simple
que permita atravesar terrenos escabrosos o pendientes muy
pronunciadas. La estructura del transportador requiere una
pequeña excavación, permitiendo el afianzamiento a tierra de
�esta, de la forma que se estime como la más conveniente.
Debido a que la estructura es compacta, requiere un mínimo de
protección.
MUL
TIPLES COMPUERTAS Y PUNTOS DE DESCARGA

Estas características son
importantes en la minera o en
excavaciones, en donde dos o más
operaciones de cavado pueden
dirigirse a un mismo punto central
de carga. En el final de la
descarga, el material puede ser
disperso en diversas direcciones
desde la línea principal. El
material también puede ser
descargado en cualquier punto a lo
largo del transportador mediante
la maquinaria complementaria para
ste efecto.�
EXTENSI N Y MOVILIDAD�
Las líneas
modulares de los
transportadoras de
cintas, pueden ser
extendidos,
acortados o
reubicados con un
mínimo de trabajo
y tiempo.
CONTROL
El diseño propio de los
sistemas de transportadores,
ha requerido reducir el
control a botones de
accionamiento en los
diferentes tramos del
transportador, y que además

pueden ser controlados desde estaciones permanentes de
control.
FUNDAMENTOS DEL DISEÑO DE CINTAS.
INTRODUCCI N�
Muchos ingenieros y diferentes usuarios de los
transportadores de cinta, están familiarizados con la teoría
y los fundamentos de la transmisión por correa. Un análisis
de los aspectos generales de los transportadores de cintas,
permite determinar que la transmisión por correa provee de
una base para el diseño de los transportadores de cintas y
elevadores de cintas. En ambos transportadores la transmisión
por correa, es transmitida por fricción entre la cinta y los
tambores o poleas de accionamiento. Ciertamente otros
elementos del diseño, que también colaboran con el sistema de
transmisión, son determinantes tanto en la potencia de la
transmisión como en la cantidad de material transportado. La
similitud entre ambos casos permite analizar y discutir si
los fundamentos del diseño de cintas están restringidos
específicamente tanto a los transportadores como elevadores.
DEFINICIONES
� Tensión en una correa es una fuerza actuando a lo
largo de la cinta, tendiendo a elongarla. La tensión de la
correa es medida en Newton. Cuando una tensión es referida a
una nica sección de la cinta, es conocida como una tensión�
unitaria y es medida en Kilonewtons por metro (kN/m).

� Torque es el resultado de una fuerza que produce
rotación alrededor de un eje. El torque es el producto de una
fuerza (o tensión) y de la extensión del brazo que se está�
utilizando y es expresado en Newton por metro (N*m).
� Energía y trabajo están relacionados muy
cercanamente debido a que ambos son expresados en la misma
unidad. El trabajo es el producto de una fuerza y la
distancia a recorrer. La energía es la capacidad de ejecutar
un trabajo. Cada uno es expresado en Joule, en el que un
Joule equivale a un Newton-metro. La energía de un cuerpo en
movimiento es medida en Joule.
� La potencia es la relación entre la realización
de un trabajo o transmisión de energía. La unidad mecánica de
potencia es el watt, que es definido como un Newton-metro por
segundo.
La potencia empleada en un periodo de tiempo produce
trabajo, permitiendo su medición en kilowatt-hora.
CONSIDERACIONES B SICAS DE DISE O� �
a) TENSI N. Una cinta transportadora es simplemente�
un medio para llegar a un fin, un medio para el transporte de
material desde un comienzo A, hasta un punto final B.
Para efectuar el trabajo de mover material desde A hasta
B, la correa requiere potencia que es proporcionada por un
tambor motriz o una polea de conducción. El torque del motor
transforma en fuerza tangencial, llamada también tensión
efectiva, a la superficie de la polea de conducción. este es�
el tirón o tensión requerida por la correa para mover el� �
material de A a B, y es la suma de lo siguiente:
� La tensión debe vencer la fricción de la correa y
de los componentes en contacto con ella.

� La tensión debe vencer la fricción de la carga, y
� La tensión debe aumentar o disminuir debido a los
cambios de elevación.
b) FLEXIBILIDAD.
Las figuras a y b, ilustran que la correa debe ser
diseñada con una suficiente flexibilidad transversal en la
zona de carga propiamente tal.
Para una cinta transportadora vaca, la cinta debe hacer
suficiente contacto con el centro de los rollos de los
polines o no funcionar correctamente. En la figura a, la�
correa es demasiado tiesa para hacer contacto con el centro
de los rollos y, por esto, se aumentan las posibilidades de
causar daño considerable a los bordes de la cinta.
En la figura b, el contacto es suficiente como para
guiar la cinta a lo largo de los polines.
Cuando el diseño de la cinta indica restricciones de
carga, estos deben ser respetados y� chequeados, mediante
sistemas que que eviten la sobrecarga, como lo será una
carcasa protectora. Para cada material a transportar, existen
valores referenciales establecidos de carga, as como métodos�
para el cálculo de estos.�

Figure a) Cinta tiesa, trabajo inapropiado.
Figure b) Cinta flexible, trabajo apropiado.
c) OTRAS CONSIDERACIONES.
La mayoría de los transportadores son relativamente
simples en diseño y bajos en tensión. Sin embargo, como los
transportadores han pasado a ser más extensos, más complejos
y han aumentado su tensión, la investigación se torna
primordial para poder obtener ventajas industriales, y esta�
generalmente se realiza en uno o más de los siguientes
puntos:
1. Aceleración y roturas, problemas de tensión.
2. Costo en tiempo y distancia.
3. Curvas verticales y terrenos irregulares.
4. Trough to flat transition distances.
5. Cambios de longitud.
6. Problemas en las dos poleas conductoras.
7. Múltiples perfiles de los transportadores.
8. Graduar el espacio entre polines.
DEFINICI N Y CLASIFICACI N DE LOS ELEMENTOS DE CINTAS� �
TRANSPORTADORAS.

Transportador es un elemento o maquinaria de
carácter preferentemente electromecánico, destinado a
trasladar productos o materias primas entre dos o más puntos,
alejados entre s , ubicados generalmente, dentro de una misma�
planta elaboradora.
� Uso de los transportadores.
Los principales usos de los transportadores se dan
Mayormente en la minera, construcción, industria
alimenticia, industria motriz entre otros.
� Tipos de transportadores.
Existen variados tipos de transportadores, y una
Variación de los mismos, pero los principales que
podemos nombrar son:
� Cinta transportadora.
� Elevador de capachos.
� Tornillo helicoidal.
Figura esquemática de los componentes de una cinta
transportadora.

Componentes de una cinta transportadora
Definición de componentes pertenecientes a las cintas
transportadoras:
a) Estructura soportante: la estructura soportante
de una cinta transportadora está compuesta por perfiles�
tubulares o angulares, formando en algunos casos verdaderos
puentes que se fijan a su vez, en soportes o torres
estructurales apernadas o soldadas en una base sólida.
b) Elementos deslizantes: son los elementos sobre
los cuales se apoya la carga, ya sea en forma directa o
indirecta, perteneciendo a estos los siguientes;
� Correa o banda: la correa o banda propiamente tal,
que le da el nombre a estos equipos, tendrá una gran� �
variedad de características, y su elección depender en gran�
parte del material a transportar, velocidad, esfuerzo o
tensión a la que sea sometida, capacidad de carga a
transportar, etc.
� Polines: generalmente los transportadores que
poseen estos elementos incorporados a su estructura básica�
de funcionamiento, son del tipo inerte, la carga se desliza
sobre ellos mediante un impulso ajeno a los polines y a ella
misma.
c) Elementos motrices: el elemento motriz de mayor uso
en los transportadores es el del tipo eléctrico, variando sus
características según la exigencia a la cual sea sometido.
Además del motor, las poleas, los engranajes, el motor
reductor, son otros de los elementos que componen el sistema
motriz.
c) Elementos tensores: es el elemento que permitir�
mantener la tensión en la correa o banda, asegurando el buen
funcionamiento del sistema.
d) Tambor motriz y de retorno: la función de los
tambores es funcionar como poleas, las que se ubicaran en el
comienzo y fin de la cinta transportadora, para su selección
se tomaron en cuenta factores como: potencia, velocidad,
ancho de banda, entre otros.
C LCULOS GENERALES DE UNA CINTA TRANSPORTADORA.�
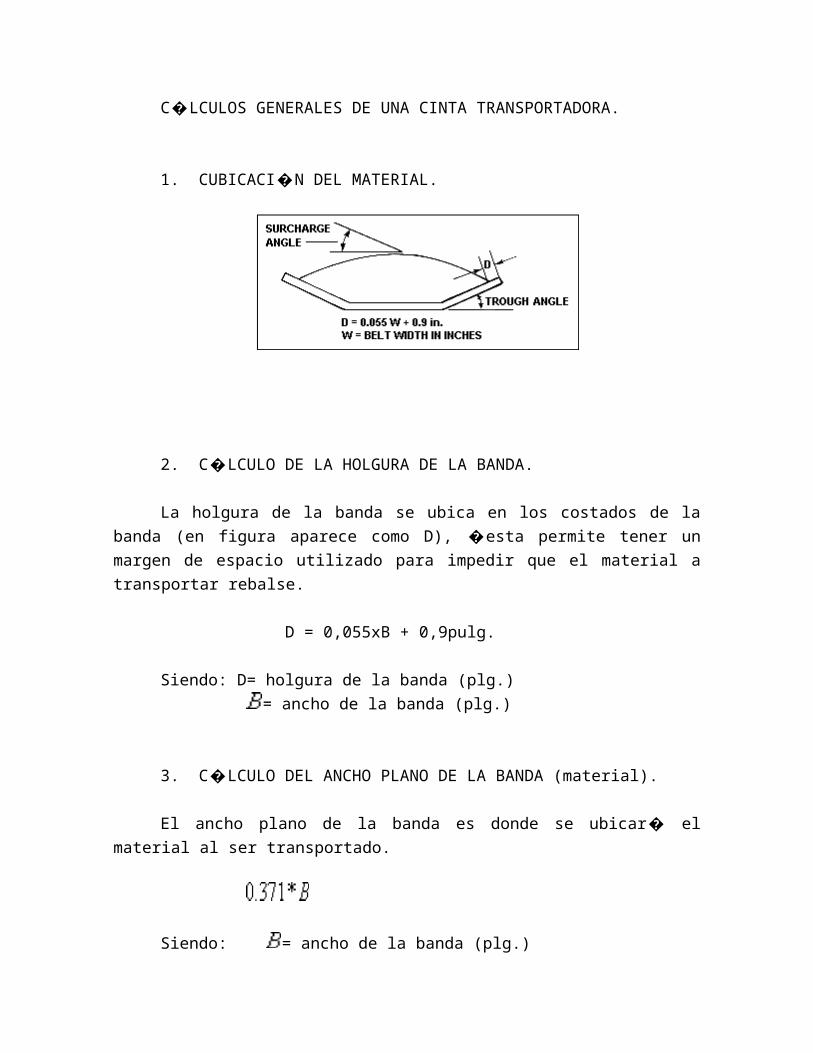
1. CUBICACI N DEL MATERIAL.�
2. C LCULO DE LA HOLGURA DE LA BANDA.�
La holgura de la banda se ubica en los costados de la
banda (en figura aparece como D), esta permite tener un�
margen de espacio utilizado para impedir que el material a
transportar rebalse.
D = 0,055xB + 0,9pulg.
Siendo: D= holgura de la banda (plg.)
= ancho de la banda (plg.)
3. C LCULO DEL ANCHO PLANO DE LA BANDA (material).�
El ancho plano de la banda es donde se ubicar el�
material al ser transportado.
Siendo: = ancho de la banda (plg.)

4. C LCULO DEL REA DEL MATERIAL A TRANSPORTAR.� �
Siendo: = rea del material (m2)�
= altura del material (m)
= base del material (m)
5. C LCULO DE LA CINTA COMPLETAMENTE CARGADA.�
Siendo: = cinta completamente cargada (m3)
= largo de la cinta (m)
= rea del material (m2)�
6. C LCULO DE LA VELOCIDAD NECESARIA.�
Para el cálculo de la velocidad necesaria, deberemos
tener el dato de la capacidad volumétrica de nuestra cinta
transportadora. Dato que por lo demás siempre es conocido ya
que es la cantidad de material a descargar por hora.
Primero calcularemos la velocidad en número de veces que
la cinta deba ser llenada o cargada.
Siendo: = número de veces que la cinta debe ser
Cargada por hora.
= capacidad (m3)
= volumen total (m3)

Ahora se calcular la velocidad en m/h.�
Siendo:
= velocidad (m/h)
= número de veces que la cinta debe ser
Cargada por hora.
= largo de la cinta (m)
Para efectos de cálculo la velocidad deber ser�
trabajada en m/s, por lo tanto se realizar la conversión�
necesaria.
7. C LCULO DEL PESO A TRANSPORTAR.�
El cálculo del peso a transportar nos permitir�
Obtener la capacidad que deber transportar nuestra�
cinta en toneladas/hora.
Siendo:
= peso a transportar (ton/h)
= peso específico material (Kg/m3)
= capacidad volumétrica cinta por hora
(m3/h)
= coeficiente corrección de concavidad y
Sobrecarga.
= coeficiente corrección de inclinación.

Para el coeficiente Z1, es posible obtener su valor
mediante el conocimiento del ángulo de sobrecarga dinámica�
del material a transportar.
En cuanto al coeficiente Z2, su nombre claramente
lo indica siendo este, el valor angular de inclinación de la�
cinta transportadora.
Ambos valores Z1 y Z2, pueden ser extraídos del
texto PIRELLI, manual para la construcción de cintas�
transportadoras .�
8. DEFINICI N Y SELECCI N DE POLINES.� �
a) Polines de carga: el polín de carga de mayor
Utilización es el de tres rodillos de un mismo largo,
con una inclinación de rodillos usualmente de 20 , 35 , o� �
45 . Al mismo tiempo, los polines de 20 son los más� �
utilizados en la mayoría de los casos, con los polines de 35�
y 45 , usualmente son utilizados solo con granos y materiales�
livianos. Sin embargo, más recientemente los polines de
ángulos mayores, especialmente los de 35 , están siendo� �
utilizados con mayor frecuencia en diferentes aplicaciones
dentro de las industrias. Las dos principales razones para el
uso de los polines de ángulos mayores (35 y 45 ) son para� � �
obtener una mayor capacidad de transporte y mayor control
sobre el derrame de material, especialmente en inclinaciones.
Generalmente en la construcción de cintas transportadoras se
selecciona el polín de menor ángulo debido a que se�
proporciona mayor manejo sobre el material con un mínimo
control de derrame de este.
La siguiente figura muestra un polín de carga estándar,
que permite la selección de este conociendo sus dimensiones,�
sin duda alguna la selección del polín deseado se podrá�
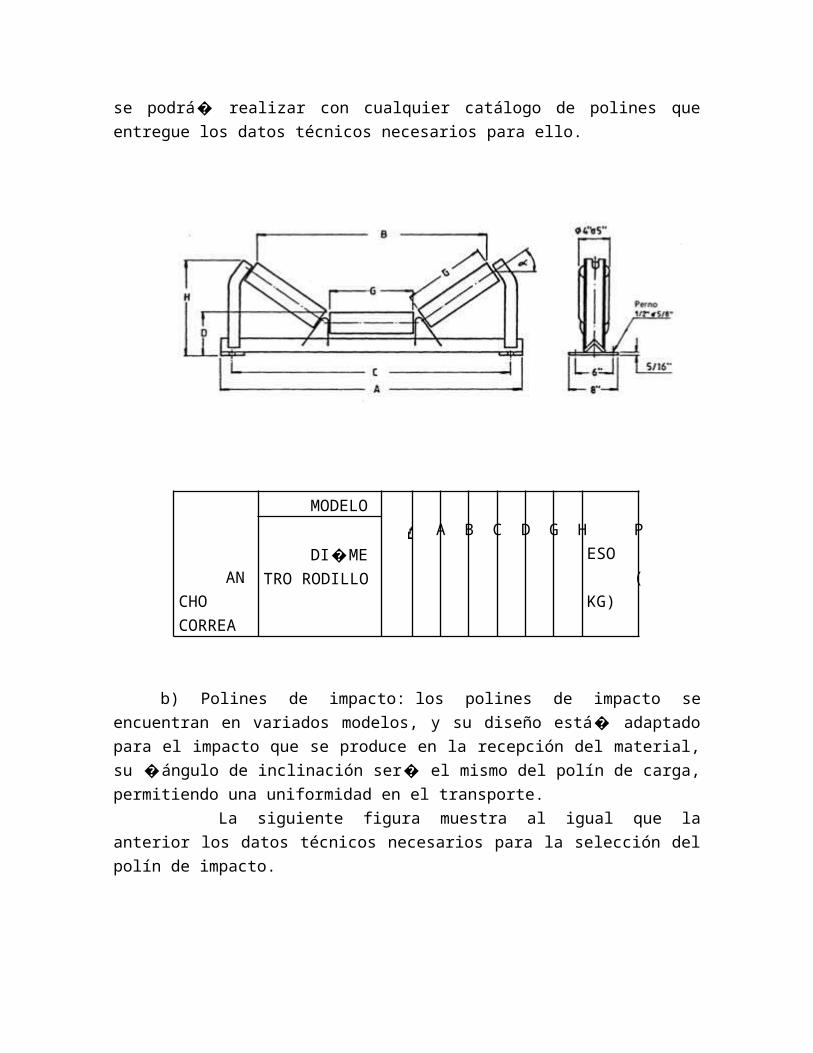
realizar con cualquier catálogo de polines que entregue los
datos técnicos necesarios para ello.
AN
CHO
CORREA
MODELO
A B C D G H P
ESO
(
KG)
DI MET�
RO RODILLO
b) Polines de impacto: los polines de impacto se
encuentran en variados modelos, y su diseño está adaptado�
para el impacto que se produce en la recepción del material,
su ángulo de inclinación ser el mismo del polín de carga,� �
permitiendo una uniformidad en el transporte.
La siguiente figura muestra al igual que la
anterior los datos técnicos necesarios para la selección del
polín de impacto.

AN
CHO
CORREA
MODELO
A B C F G H P
ESO
(
KG)
DI MET�
RO RODILLO
c) Polines de retorno: los polines de retorno como su
nombre lo indica, permiten el retorno de la banda mediante el
apoyo de esta.
La siguiente figura muestra al igual que las
anteriores los datos técnicos necesarios para la selección
del polín de retorno.

AN
CHO
CORREA
MODELO
A C D G P
ESO
(
KG)
DI METR�
O RODILLO
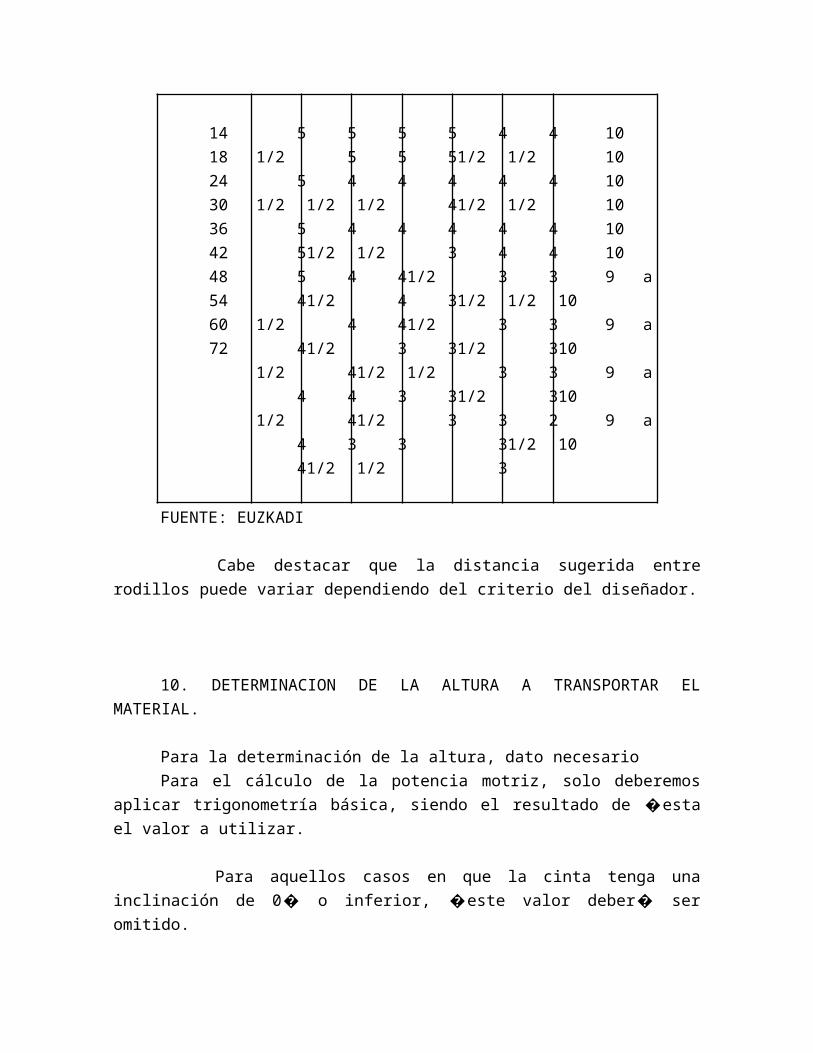
9. C LCULO DE LA DISTANCIA ENTRE POLINES.�
Para la determinación de la distancia entre polines,
se utilizar la siguiente tabla la cual nos entrega el�
espacio recomendado entre polines de:
ESPACIO SUGERIDO DE RODILLOS DE CARGA Y DE
RETORNO
ANC
HO DE
BANDA
PLG.
PESO DEL MATERIAL EN
LB/PIE3
RODI
LLOS DE
RETORNO3
5
5
0
7
5
1
00
1
25
1
50
14
18
24
30
36
42
48
54
60
72
5
1/2
5
1/2
5
5
5
4
1/2
4
1/2
4
1/2
4
4
5
5
4
1/2
4
1/2
4
1/2
4
1/2
4
4
4
3
1/2
5
5
4
1/2
4
1/2
4
4
4
3
1/2
3
1/2
3
1/2
5
5
4
4
4
3
1/2
3
1/2
3
1/2
3
3
4
1/2
4
1/2
4
4
3
1/2
3
1/2
3
1/2
3
3
3
4
1/2
4
1/2
4
4
3
1/2
3
3
3
3
2
1/2
10
10
10
10
10
10
9 a
10
9 a
10
9 a
10
9 a
10
FUENTE: EUZKADI
Cabe destacar que la distancia sugerida entre
rodillos puede variar dependiendo del criterio del diseñador.
10. DETERMINACION DE LA ALTURA A TRANSPORTAR EL
MATERIAL.
Para la determinación de la altura, dato necesario
Para el cálculo de la potencia motriz, solo deberemos
aplicar trigonometría básica, siendo el resultado de esta el�
valor a utilizar.
Para aquellos casos en que la cinta tenga una
inclinación de 0 o inferior, este valor deber ser omitido.� � �

11. CALCULO DE LA POTENCIA EN EL TAMBOR MOTRIZ.
Siendo:
= potencia tambor motriz. (KW)
= factor en función del largo de cinta.
= factor de rozamiento.
L= largo de la cinta. (m)
= peso de la banda. (Kg/m)
= peso de los polines de carga. (Kg/m)
= peso de los polines de retorno. (Kg/m)
= peso da transportar. (Ton/h)
= velocidad. (m/s)
= altura a transportar el material. (m)
= recargo. (KW)
Los factores C4 y pueden ser extraídos del catálogo
TRANSILON, bandas transportadoras y para�
procesamientos .�
12. C LCULO DE LA POTENCIA MOTRIZ NECESARIA.�
Siendo:
= potencia motriz necesaria. (KW)
= potencia tambor motriz. (KW)
= rendimiento (89% = 0.89).
Con el cálculo de la potencia motriz necesaria podemos
realizar la selección de nuestro motor mediante catálogo.

13. CALCULO DE LA POTENCIA EFECTIVA.
El cálculo realizado anteriormente, (potencia motriz
Necesaria), nos permitió realizar la selección del�
motor que vamos a utilizar, este motor nos entregar una� �
potencia diferente a la obtenida por cálculo (generalmente
mayor), por esto se debemos calcular la potencia efectiva de
este motor dada por la siguiente fórmula.�
Siendo:
= potencia efectiva. (KW)
= potencia entregada por el motor. (KW)
= rendimiento (89% = 0.89).
14.CALCULO DE LA FUERZA PERIF RICA EN EL TAMBOR.�
Siendo:
= fuerza perif rica en el tambor. (N)�
= potencia efectiva. (Kw)
= velocidad. (m/s)
15. CALCULO DE LA TENSI N M XIMA EN LA BANDA.� �
Siendo:
= tensión máxima en la banda. (N)
= fuerza periférica en el tambor. (N)

= factor en función del ángulo de�
Abrazamiento, y tipo de tambor.
Siendo:
= factor en función del tipo de correa.
= tensión máxima en la banda. (N)
= ancho de la banda. (mm)
Para este cálculo debe cumplirse que�
Los factores C1 y C2 pueden ser extraídos del catálogo
TRANSILON, bandas transportadoras y para procesamientos .� �
16.DETERMINACION DE LA DISTANCIA DE TRANSICI N.�
17. CALCULO DEL DI METRO M NIMO DEL TAMBOR DE� �
ACCIONAMIENTO.

Siendo:
= diámetro mínimo del tambor. (mm)
= potencia efectiva. (KW)
= velocidad. (m/s)
= ángulo de abrazamiento. ( )� �
= ancho de la banda. (mm)
El resultado obtenido por cálculo puede ser
comparado con los diámetros recomendados en diferentes
catálogos de cintas, que según las especificaciones antes
obtenidas permiten una selección con mayor rapidez, lo ideal
es que ambos datos (catálogo y calculado), se aproximen en su
valor.
18.CALCULO DEL N MERO DE REVOLUCIONES DEL TAMBOR DE�
ACCIONAMIENTO.
Siendo:
= revoluciones del tambor de
accionamiento. (1/min)
= velocidad. (m/s)
= di metro tambor seleccionado. (mm)�
19. CALCULO DE LA RELACI N DE REDUCCI N.� �
Siendo:
= relación de reducción.

= revoluciones por minuto de entrada.
(1/min)
= revoluciones por minuto de salida.
(1/min)
20. CALCULO DEL TORQUE EN EL EJE DEL TAMBOR MOTRIZ.
Siendo:
= torque en el eje del tambor motriz.
(Kp*m)
= potencia. (HP)
= revoluciones por minuto de salida. (Rpm)
Con los datos de relación de reducción ( ), y
torque en el eje del tambor motriz ( ), podemos realizar la
selección del motor reductor que más se acerque a las
especificaciones calculadas.
21. CALCULO DEL DI METRO DEL EJE DEL TAMBOR MOTRIZ.�
Siendo:
= momento de inercia. (cm4)
= momento torsor. (Kg/cm)
= longitud eje. (cm)
= ángulo de torsión permisible. (Rad)�

= módulo de elasticidad del acero. (Kg/cm2)
Para obtener el diámetro del eje debemos recordar
que para el cálculo del momento de inercia podemos utilizar
diferentes fórmulas, es as como el diámetro estar dado por� �
la siguiente ecuación:
Por despeje tenemos que el diámetro ser igual a:�
Siendo:
Diámetro del eje. (cm)
= momento de inercia obtenido en la fórmula anterior.
(cm4)
22. C LCULO DE LA SUJECI N DEL MOTOR.� �
Mediante despeje tenemos:
Siendo:
= momento. (Kp*m)
= potencia. (HP)
= revoluciones por minuto de salida. (Rpm)