GPS/Dead Reckoning Navigation with Kalman Filter Integration

High-accuracy Dead-reckoning
System (HADRS) for Manned
and Unmanned Ground Vehicles
PI: Johann Borenstein* Research Professor at the University of Michigan
* 28 years experience in GPS-free position estimation for mobile robots and pedestrians
Mobile Robotics Lab

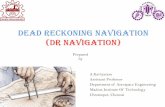
High-accuracy Dead-reckoning System (HADRS)
HADRS works on any wheeled or tracked ground vehicle.
Works on any terrain, including rugged, steeply inclined terrain.
Requires only a power connection and
wheel/track encoder data from the host vehicle, or our proprietary, retrofittable add-on encoders.
Optional components:
retrofittable add-on
encoders
can be mounted to almost any vehicle in less than one hour
no need to access vehicle’s own odometry system
Trajectory-plotting OCU for tele-operator support.
HADRS installed on a Packbot. HADRS fits neatly into 1/3 of the
payload bay of a Packbot, but can be mounted on any vehicle

Features
Works without GPS, computer vision, beacons, or any other external references
but can accommodated and integrate optional external GPS.
Is indifferent to environment: indoors, outdoors, urban, or rural.
Is small-sized (fits into 1/3 Packbot payload bay).
Is designed for minimal power consumption.
Outputs JAUS compatible, time-stamped X, Y, Z, and heading data stream at 10 Hz.
Outputs data via Ethernet, WiFi, RF, or long-range data modem.
Is unaffected by extreme operating temperatures.

Performance For missions of up to 30 minutes duration:
average position error: 0.5% of distance traveled even on rugged terrain;
maximum position error: 1% of distance traveled
Average heading error: 1°
Errors may be larger on deformable terrain (sand, mud) or any other terrain that promotes excessive track slippage.
For longer missions
Position errors increase at ~1% for every 30 minutes of operation.

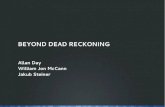
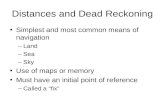
HADR Description – Main Components Controlled by a Gumstix computer-on-module.
Sensor modalities:
NavChip inertial measurement unit (IMU)
KVH single-axis fiber optic gyro (FOG)
Host’s odometry OR our add-on encoder system.
Active temperature stabilization for FOG and IMU.
Optional:
Integration with external GPS receiver.
Operator console unit
Version 1: Text only
Version 2: trajectory plotter to support tele-operation
GumstixComputer-on-Module
USB Hub
External
GPS (optional)
Ethernet
or WiFi
Optional OCU(For convenience only, not needed at runtime)
Initialization, mode
selection, debugging
Optional WiFi,
USB, or RF modem
HADR System
Add-on
encoders(optional)
KVH FOG
Closed-loop
temperature
stabilization
IMU
Closed-loop
temperature
stabilization
Host
ComputerComputed pose
Streaming at 10 Hz
Main components of the HADRS

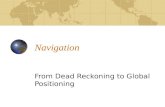
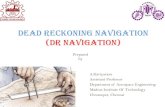
Retrofittable Add-on Encoders
Add-on encoder sub-system comprises two encoders.
Each encoder consists of
1. a pair of latching hall-effect sensors mounted to the robot’s chassis next to a track sprocket or wheel,
2. a laser-cut plastic encoder disk sized to fit inside the sprocket
Each encoder disk has between 4 to 18 press-fit neodymium magnets arranged in alternating north-south orientation.
Function:
As the sprocket turns, alternating magnetic poles pass over the hall-effect sensors, generating quadrature signals.
Retrofittable add-on encoder system, here
fitted to a Packbot track drive sprocket

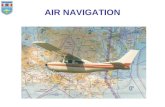
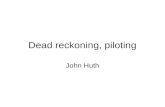
Experimental Results with HADRS – Run 1
Red curve: Trajectory produced by HADRS
Faint orange curve: Trajectory from consumer-grade GPS used for ground truth. (GPS got a “fix” only at Point ‘A’, therefore the GPS trajectory starts only at ‘A’. )
Total travel distance: 976 m
Total travel time: 23.5 min
Return Position Error: 1.5 m (= 0.15% of total distance)
Largest position error anywhere during this run (near x = -190 m, y = -270 m): ~3 m (= 0.3% of total distance)
Steepest slope traversed: ~17° on grass (see photo inset taken near Point A)
Challenges in this run:
partially sloping terrain,
zig-zagging south of ‘A’,
traverse of several curbs.
Trajectory of Run 1 with the
HADR system installed on a Packbot. To visualize the slope of the terrain, the photo inset
shows the experimenter standing near Point ‘A’ -270
-250
-230
-210
-190
-170
-150
-130
-110
-90
-70
-50
-30
-10
10
-230 -210 -190 -170 -150 -130 -110 -90 -70 -50 -30 -10 10
Y [
m]
X [m]
HADRS Position
A

Experimental Results with HADRS – Run 2
Red curve: trajectory recorded by the HADR system
Total travel distance: 676 m
Total travel time: 28.5 min
Return Position Error: 1.04 m (=0.15% of total distance traveled)
Largest position error anywhere during this run: ~2 m (=0.3% of total distance traveled)
Steepest slope traversed: 10°-15° on grass
Challenges in this experiment:
partially sloping terrain,
traverse of several curbs
Trajectory of Run 2 with the HADR
system installed on a PackBot -140
-130
-120
-110
-100
-90
-80
-70
-60
-50
-40
-30
-20
-10
0
10
-230 -220 -210 -200 -190 -180 -170 -160 -150 -140 -130 -120 -110 -100 -90 -80 -70 -60 -50 -40 -30 -20 -10 0 10
Y [
m]
X [m]
HADRS Position
Slope down ~10-15o

Acknowledgements and Disclaimers Acknowledgements
Parts of this Project Agreement Holder (PAH) effort was sponsored by the U.S. Government under Other Transaction number W 15QKN-08-9-0001 between the Robotics Technology Consortium, Inc, and the Government. The U.S. Government is authorized to reproduce and distribute reprints for Governmental purposes notwithstanding any copyright notation thereon.
Some parts of this effort were supported by the Ground Robotics Reliability Center (GRRC) at the University of Michigan, with funding from government contract DoD-DoA W56H2V-04-2-0001 through the Joint Center for Robotics.
Disclaimer
The views and conclusions contained herein are those of the authors and should not be interpreted as necessarily representing the official policies or endorsements, either expressed or implied, of the U.S. Government.