AENC Roadmap to Success Marketing Communications Plan - Communicopia
LEVEL (jI
Hatteras. Abyssal PlainLow Frequency
/Bottom Loss Measurements,
/ Peter D.JHerstein•,. Robert K.IDullea
//Salvatore R.lSantaniello
Special Projects Department
S/ .. ...... //~) 14 Apr1l 1979/ if .'5-5 .. ".... L
0' NUSCNAVAL UNDERWATER SYSTEMS CENTERNewport.Rhodo Island @ New London.Connecticut
Approved for public release; distribution unlimited-
x /j.• ,-
PREUMAC
This document was prepared under NIJSC Project No. A-b50-U0,Navy Subprojoct No. SF 52.t52 602-19345, "Low Frequency ForwardScattering St.udies ,' Principal Investigator, S. R. Santu !ello(Code 3104). The sponsoring activity is the Naval Sea SystemsCommand (S1A Obll-4), A. P. Franceschetti, Program Manager.
The technical reviewer for this report wis Gustave lxibiger(Code' 32/).
REVIEWED AND APPROVED: 14 April 1979- /"
-•. / ---- //
I / /
R. W, IH,,s.u,
Head: Special Projects Department
Ihe authors of this report are lov•ited at the New LondonSLaboratory, N Coal Inderwator Systems Ceiter,4i ~New L~ondon, Connecticut 00320.
REPOT DCUMNTATON AGERKAD INITRUCTIONSREPOT DOUMETATIN PAE BFORZ COMPLETING FORMI. WIFORT NumalR iGVT ACCESSINNO: 01R IPI N SCATALOG NUNSER
TR 5781. TITLE 0041 ejbiiI0) S.TVP9 OF RPOR0T A PIERIOD COVERED
IIA17EiHAS ABYSSAL PLAIN LOW FREQUENCY BOTTOMLOSS MEASUREMENTS
0.PERFORMING Orno. REPORT NUMBER
T. AUTHOR(*) 5. CONTRACT 0R GRANT NUMBCR-@)
Peter D. lh~rsteinRobert K. IDulleaSalvatore R'. Santaniollo
S. 0ERPORWING ORGANIZATION NAME AND ADDRESS Ir0. P AMANaval1 Underwater Systems (.enter /AREA & ITM rNMe~ TSNow London Laboratory' A0500bNew London., ('I' 06(320
11, CON4TROLLING OFFICE NAMX AND ADDRE8S 13. REPORT DATS
Naval Sea Systems Command (SEA 06112) 14 April1979 ,
_____ _____ ____I 112__11. NWITW19V AENC NI1 & A00 5198l Siferm froM C~tAMIII6 Offto*) IS. SEC URIYV CLASS. (of this "Poet)
UNCLASS 111-1)
ISO, ff~jC~ASSIJ1CATIONIDOWNGRADINO
16. 015TRIDUTiON STATEMENiT (0 hs As.Rpuec)
App~~ rov t C pul I i c ve. Iease.; v;dji s t I. ibI),t ioil u1n 11m:1ted.
1t1. DISTRIBUTION STATEMENT (of the Obeftroof Onfoud to i~ *@ DIt~~ee. i ftOf 601 REO)
1.SUPPLEMINYARV NOTES
19. xEY W3ORD (Cmmeuu uwqaeold D auoeap gi side~b 111604 MeQý4Wollmwlbee)Bottom Loss MeasurementsDevonvolut ion Process ingOcean Bottom ModelingOcean Sediment. Impulse ResponseOcean Sediment Sound Refraction
0."TRACT (C411I OlNs ueue.O sfds It IWOOOO 4104 Id"stD 6F W0 mý)Bottom-loss measurements were made for frequencies less than 800. l1z att thirt-
stations in the Hatteras Abyssal Plain. The stations were each sep~ara1ted 11ppro'x-imately 55 km along 700 301W longitude. The data acquisition procedure wits tolaunch two solf-recording submersibles (AIYI'OSUOYS) and then maneuver from and tothe launch site detonating, explosives as the AUTOBLJ)YS recorded data. Because o0the experimental geometry, the direct and bottom-interacting signals were time-.separated ats they arrived at the AiJTOHIEOYS. Thus, a "self-calibrating" (vr
DD 1473
20. (Cont'd)
processing procedure could be used to compute bottom loss values.
Bottom loss versus grazing angles (5-66 deg) was obtained over a widebandwidth (90-790 Hz) and for a nunber of narrow bandwidths (1/3 octave andless). Broadband results were found to be homologous between stations,whereas the narrowband results were less correlated. Negative bottom lossvalues were also observed.
Replica deconvolution processing was performed using the associatedtime-separated direct and bottom interacted signals over a large range ofgrazing angles. A history of the bottom/subbottom impulse response as afunction of grazing angle was then constructed from the deconvolved signals.This history showed evidence of strong subbottom reflected and sedimentrefracted arrivals in the bottom interacting signals. Since these types ofarrivals were present, the calculation of negative bottom loss can beattributed to use of the Rayleigh plane wave reflection model, which doesnot account for non-plane wave refracted or reflected signals.
Analyses of the impulse responses for the southern station also aidedin developing a geophysical description of the sediment structure. Thederived structure consists of a thin (21 m)/constant sound-speed layeroverlaying a thick layer having a linear depth-dependent sound speed. Thisstructure is representative of a class of documented subbottom sedimentstructures that can support the propagation of low-frequency acousticsignals traversing non-plane wave reflected and refracted acoustic paths.,
ioen~if For
NISDCTABUnal"lofl C
-J - ' - .I /
Dist. jCA
TR 5781
TABLE OF CONTENTS
Page
LIST OF ILLUSTRATIONS. .. .. ......... ... . .. ... ....
LIST OF TABLES....... . . . . .. .... *.*.*..ii
INTRODUCTION .. . . . . . . . . . . . . . . . . . . . .
BASIC OBJECTIVES....... . .. .. . . . . . . . . . . . .1
B ASIC APPROACH.... . . . . . . . . .* . . . . . . .
DATA ACQUTISITION PROCEDURES . . . . .. . .. .. ... .. . .. . .. 2Bottom Loss Measurements With AUTOBOUYS . . . . ........................... . 2Seismic Measurements . . . . ....... . . . ... 3
Sediment Core Measurements ....... .. . .. 3
SUMMARY OF OPERATIONS . . . . . . . . . . . . . . . . . . .. . . . . . 3
BOTTOM LOSS DATA PROCESSING PROCEDURES . . .. .. . ... . ... . .. 4
Preprocessing Digital Filtering. . . . . . . . . . 4
Processing for Separated Arrivals. . ... . .. 4
BOTTOM LOSS RESULTS . . . . . . . . . . . . . 99* . .. . 8
Nature of the Bottom Arrivals. . . .. . . . . . . . . . . . . 8
Geometry Dependence of Bottom Loss . . . . # 0 14IFrequency Variations of Bottom Loss ...... a. . . . . . . . .. 14Negative Bottom Loss . . . . . . . . . . . . . . ............................ 14Geographical Variations of Bottom Loss# . . . . . . . ' . 15
PRELIMINARY MODELING AND INTERPRETATION . . . . ............................... 15Empirical Modeling Via Polynomials . . . . . 0 . . . . . . . . . ... 15Input Parameters for a Geophysical Model . . .................... . . . . 16
SUMMARY AND CONCLUSIONS .. .......... . ................................... 17
REFERENCES . . . ......... ......... ...... ...... ...... ...... ...... ...... ......... ............. . 34
APPENDIX A--SOUND SPEED VERSUS DEPTH PROFILES . . . . . . . . . . . . . A-i
APPENDIX B--BOTTOM LOSS VERSUS GRAZING ANGLE DATAFOR ALL STATIONS AND FREQUENCIES . . ......................... . . B-i
APPENDIX C--SIXTH-ORDER POLYNOMIAL REPRESENTATIONS OFBOTTOM LOSS DATA . . . . . . . .......................... . . . . . C-i
TR 5781
LIST OF ILLUSTRATIONS
F i gu re Page
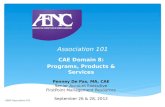
I Operations Area for Hatteras Abyssal Plain LowFrequency Bottom Loss Measurements . . . .. ... . 19
2 Typical Representation of Geometry for Bottom LossMeasurements (Station B8,-3) .. . . . . . . . . . 20
.1 Block Diagram of Data Processing System for Bottom LossMeasurements . . . . . . . . . . . . 6.. . . . . .. . . 2 1
4, Sequence of Arrivals for a Typical Reception Beforeand After Filtering Line Components - (Station BL-I,Al~rIuBIM No. 2, Og W 13.0o) . . . . . . . . . . . . . . 22
5 Averaged Direct Path Energy Spectrum (Average SourceDepth 90q m) . . . . . .. . ... . . . . . . . . . . . 23
6 Example of Signal Enhaancement Obtained UsingDeconvolution . . . . . . . . . . . . . . . . . . . 24
7 Consecutive Time Displays of Bottom Arrivals as aFunction of Crazing Angle With Respect to InterfaceReflected Angle (Station BL-I) o . . . . .. . . . 0 25
8 Squared Travel Time Difference Between Subbuttom andOcean Bottom Reflections as a Function of the CosineSquared of the Ocean Bottom Grazing Angle . . . . . ... 2b
9 Measured and Predicted Travel Time Differences B,,tweenOcean Bottom Ref lected and Subbottom RefractedArrivals .... ......... . . . . . . . . . . . . . . . 27
10 Deconvolved Sediment Interacted Signals LowPass Filtered at Three Frequencies: 500, 250,and 200 Hz (Site Bl-I, Upper Buoy) . . . . . . . . . . 28
II Comparison of Bottom Loss Versus Grazing Angle as aFur ri of Receiver Depth (Station BL-) . . . . . . . . 29
12 Frequency Variation of Bottom Loss Versus GrazingAngle . . . . . . . . . . . . . . 30
13 Geographical Variations of Bottom Loss VersusGrazing Angle Data (Broadband) . . . . . ........ 31
0 now
TR 5781
LIST OF ILLUSTRATIONS (Co:KL'd)
Figure Page
14 Polynomial Fitted and Averaged Broadband BottomLoss Measured at Three Stations in theHatteras Abyssal Plain ........... ................. .. 32
15 Geographical Variations in Bottom Loss (Narrowband) ..... .. 33
LIST OF TABLES
Table Page
I Locations and Descriptions of Bottom LossMeasurements ............ . . . .. .. ...... ............ 2
2 Summary Analysis of Sediments Recovered byBoomerang Core Near Station BL-3 ........ ................ 5
3 Summary Analysis of Sediments Recovered byBoomerang Core Near Station BL-2 ........ ................ 5
4 Filter Parameters Used In Narrowband Bottom LossAnalysis .................... ........................... 7
iviit/ iv
Reverse Blank
TR 5781
HATTERAS ABYSSAL PLAIN LOW-FREQUENCYBOTTOM LOSS MEASUREMENTS
INTRODUCTION
In May and June 1973, low-frequency bottom-loss measurements were con-ducted at thrre locations in the Hatteras Abyssal Plain of the AtlanticOcean by the Acoustic and Environmental Research Division of the NavalUnderwater SysLems Center (NUSC) and the Lamont-Doherty Geological Observa-tory (LDGO). This project was designated MAINLOBE (MAjor INvestigation forLow-Frequency Ocean Bottom-Loss Experiment) 73. The text that follows isdivided into the topical areas of (1) basic objectives, (2) basic approach,(3) data aquisition procedures, (4) summary of operations, (5) data process-ing procedures, (6) analysis and interpretation of the bottom-loss measure-ments, (7) preliminary modeling, and (8) summary of results.
BASIC OBJECTIVES
The primary objectives of the experiments described in this report arethe (I) measurement of ocean hottom loss over a wide frequency range(20-1000 Hz) as a function of grazing angle (5-90 deg) and (2) estimation ofsediment acoustic parameters (such as density, sound speed, and attenuation)for sediment interaction modeling and prediction of propagation loss.
BASIC APPROACH
Three measurement locations, shown within the circled areas in figure 1*as stations BL-l, -2, and -3, were employed in MAINLOBE to account forpossible acoustic variations from changes in bottom topography and structure(both subbottom and bottom interface). Data were collected successfully ateach of the three measurement locations. Explosive signals, underwatersound (SUS) charges were used in conjunction with two self-contained, com-pletely automated receiving systems (AUTOBUOYS) to generate and receive thelow-frequency wide-band underwater signals.
1
To enable estimation of sediment acoustic parameters, seismic reflec-tivity measurements and subbottom profiling were planned along the tracksshown as dashed lines in figure 1. These operations, conducted jointly bypersonnel from NUSC and LDGO, involved the transmission of acoustic signalsgenerated by air guns and the reception and recording of these signals bymeans of a towed horizontal receiving array system. 2 Boomerang cores werealso planned at locations near the bottom-loss measurements. The positionsof the two successful boomerang cores are shown in figure 1.
*Figures 1 through 15 are presented at the end of the text.
TR 5781
Environmental and oceanographic data in support of the above measure-ments included:
1. sound speed profiles (SSP) (stations BL-l,-2,-3) and2. expendable bathythermographs (XBT)
DATA ACQUISITION PROCEDURES
BOT1TOM-LOSS MEASUREMENTS WITH AUTOBUOYS
The ocean bottom-loss experiwents conducted during project MAINLOBEinvolved the deployment of two AUTOBUOYS, SUS explosive charges, andAN/SSQ-57A or AN/SSQ-41 sonobuoys. An example of the measuremenc geometryis shown in figure 2 for a typical AUTOBUOY receiver. A primary objectivein NUSC's approach to measurement of low-frequency acoustic bottom lossusing $US charges is to obtain time-isolated direct and bottom interactionpath arrivals over a wide range of grazing angle. The optimum depths ofsignal source and receiver for arrival separation were determined fromray-tracing analysis using the Navy Interim Surface Ship Model II (NISSM II)computer model. 3 To study the possible effects of source/receivergeometry on bottom loss measurements, two AUTOBUOYS were deployed at eachmeasurement station. The general measurement procedure consisted of (1)deploying the first AUTOBUOY on station, (2) traversing 2.3 km north, (3)deploying the 'econd AUTOBUOY on station, (4) traversing 32 km north, (5)turning 180 deg, and (6) deploying SUS charges while returning on a duesouth track to the second AUTOBUOY. The SUS charges were type EX-94(0),containing 816 g tetryl and 31 g primer, set to detonate at 914 m.
Data concerning AUTOBUOY hovering depths, functioning, and minimum/maximum range separation are listed in table 1 for all three measurementstations. The sonobuoys were used to monitor the sourze level and detona-tion depth of the explosives and the near range (high grazing angle) bottompath arrivals during the measurement period.
Table 1. Locations and Descriptions of Bottom Loss Measurements
pr.poo in.J Wg ALIIOLA) (a) "inteS 1onfo (ha) NKOft" R6040 (ba)AU, tTl•WtI boptho Ileeoseefu) wtiot. 41M)LVI) l.IflUJI i 2 ALf IL11 |, A1. MMIK. 2
•tt, Ltattt.I. tttttt No,, N.'. 2 We. I We. 3
'1 2 28"'I'. tN '4"'OO0N 3W4 31' 3|% NO. Io. 1).) - 0.4 i
3t - I 0(3,.0N 'L'O30.0'N 3142 3111 5. y*1 - I ' .. ,
4 e,. a> 1 . .t iv..-te •pthO on A.l,4I,. A. ai
Either iuusediately prior to or following the acoustic measurements, adeep SSP cast was made for each station to a depth of at least 4500 m.These sound speed versus depth profiles are presented in appendix A.
TR 5781
SEISMIC MEASUREMENTS
The procedure for obtaining wide angle seismic data was to first deployan air gun and then pay out a buoyant seismic receiving line array (122 mlong) from the stern of the research ship as it proceeded at 4 knots. Afterdeployment, the speed of the ship was increased to 6 knots and a sonobuoywas deployed. The acoustic signals generated by the air gun were receivedby the line array and the sottobuoy and recorded on LDGO's seismic profilingsystem. The profiling system provides (in situ) some general results con-cerning the characteristics of the ocean sediment and Layer structure. Thesame data were also recorded on analog tape for further laboratory analy-sis. Additional information concerning the LDGO seismic data processingprocedures can he fo, nd in 'Physics of Sound in Marine Sediments." 4 Ananalysis of measurement results is reported in an unpublished work by Houtzand Bryan.5
A buoy having a deep (1128 m) hydrophone was also deployed while makingthe seismic measurements. This acoustic radio buoy (ARAB) is a NUSC innova-tion consisting of sonobuoy transmitters installed in a spar buoy housing.The ARAB system was used primarily to obtain a measure of the effectivelow-frequency beam pattern (including the Lloyd mirror effect) of the airgun. Poor signal-to-noise ratio (SNR) of the bottom-interacted signalsprecluded analysis of the ARAB data to obtain high grazing angle bottom lossresults.
SEDIMENT CORE MEASUREMENTS
Core measurements were made using a Benthos boomerang core. 6 Thisdevice is an untethered free-fall corer having a 1.22 m long barrel and anoutside diameter of 7.94 cm. The plastic core liner tube, which holds thecore sample, is 1.22 m long, has an outside diameter of 7.3 cm, and aninside diameter of 6.50 cm. After the core penetrates the sediment. atrigger releases the barrel from the housing and buoyant glass spheres liftit to the surface with the captured sediment.
SUMMARY OF OPERATIONS
Only a saummary of proj'ct MAINLOBE operations is presented hereinbecause daily operations have been reported in detail. 7 Successfulbottom-loss measurements were made at all three stations: however, nousable data were obtained from AUTOBUOY No. 1 at stations BL-2 and BL-3because it malfunctioned.
Seismic measurements were successfully completed along the tracks shownin figure 1. The ARAB was successfully deployed in each of the three areasof seismic profiling; however, low-frequency noise caused by electricalfeedback in the ship power line during operation of the air gun compressor kdegraded the data. Seismic data were not affected by this problem.
3
B .--
rw
TR 5781
Only two of six boomerang cores were successfully retrieved. The firstwas retrieved at 290 06.8'N, 700 30.0'W, near station BL-3. The otherwas retrieved at 280 36.5'N, 700 24.5'W, near station BL-2. A summaryanalysis of the data is presented in tables 2 and 3.
P'rIOM-LOSS DATA PROCESSING PROCEDURES
The basic approach to Lhe measurement and processing techniques employed
at NUSC for the determination of ocean bottom loss has been previously docu-mented. 8,9,10 A summary of these procedures and the special processingtechniques required is described below.
DI GIT I ZAT ION
As shown in figure 3, data from two of the three available staggered-gain AUTOBL3OY analog tape channels were passed through a 750-Hz low-passfilter, digitally sampled, and stored on magnetic tape using a UNIVAC 1230computer system. To compensate for record and/or reproduce tape-speedvariations, external sampling commands were generated from a 1000-Hz timecode carrier (also recorded on the AUTOBUOY analog data tape) via a phase-locked frequency multiplier. A sampling rate of 3000 Hz, which exceeds theNyquist sampling criterion rate by a factor of 2, was used to facilitatedeconvolutior, processing of the data.
t.
PREPROCESSING DIGITAL FILTERING
Following digitization, contaminating interference caused by alternatingcurrent components during playback of the AUTOBUOY analog tape was removedby digital filtering. A digital filter was designed to pass all frequencieseincept the narrowband alternating current line components. In figure 4, atypical sequence of arrivals prior to and following the line componentfiltering is shown.
PROCESSING FOR SEPARATED ARRIVALS
Bottom Loss Calculation
The determination of bottom loss for any given explosive detonation wasaccomplished by using
BL = (RD - RB) + (ND-NB), (I)
where
BL = bottom loss (dB),
RD - received energy in direct arri.val (dB),
4
. .x& .. ' --. . .•
S-• • .= :: -: -. -- -- .. ... , • - -' - V: - ____= • • "
TR 5781
Table 2. Sutmnui'y Aialysis oi Sediments Recoveredby Boomerang Ccre Near Station BL-3
Depth Sound Speed* Bulk Density Impedance
(cm) (m/s) (g/cm3 ) (10 3 .g/cMi 2 /s)
Interface 1608 1.11 1.785
15.2 1600 1.11 1.776
30.5 1637 1.11 1.817
45.7 1603 1.15 1.843
57.2 1637 1.15 1.883
Average 1617 1.13 1.827
*Corrected to seafloor in situ conditions.
Table 3. Sumnmary Analysis of Sediments Recovered
by Bo•omerang Core Near Station BL-2
Depth Sound Speed* Bulk Density Impedance(cm) (m/s) (g/cm3 ) (103 g/cm
2 /s)
Interface 1609 1.33 2.140
3.8 1584 1.33 2.107
12.7 1616 1.33 2.149
29.4 1616 1.33 2.149
41.2 1621 1.20 1.945
Average 1609 1.30 2.092
*Corrected to qeafloor in situ conditions.
5
TR 5781
RB - received energy in bottom-interacting arrival (dB),
ND - propagation loss over direct path (dB), and
NB - propagation loss over bottom-reflected path (dB).
As is evident from the above expresaion, the procedure for calculatingbottom loss is comparative and self-calibrating in that only the relativeenergy difference between the direct and bottom interacting arrivals need beexperimentally determined. The corresponding propagation loss within thewater column for the two arrivals is determined using a NISSM II computerray-.tracing program. 3 The lnput parameters for NISSM II were (1) in-situmeasured water SSP, (2) water depth, and (3) the depths of the signal sourceand of Lhe receiver. In computing the propagation loss for the bottom-reflected path, the computer program assumes a flat, single-layer, zero-loss(totally reflecting) ocean bottom. NISSM II also provided an &zcurateestimate of the grazing angle for each bottom-reflected arrival, asdiscussed below.
.An analog reconstruction of the digitally sampled data (after prepro-cessing filtering) is shown in the lower trace of figure 4, where the fourarrivals resulting from the detonation of a single explosive are clearlyseparated in time. The direct, bottom, and surface-reflected arrivals areisolatedw via a UNIVAC 1108 computer program by using an energy thresholdcrite-ion. 9 9l0 The program then computes the time separation and pulseduration of the various arrivals. Furthermore, each arrival is partitionedand increased in duration by appending zeros to it. The time extension ofthe digital. data is required to satisfy the response time of the recursivedigital filters centered at the lower frequencies. Following partitioning,the energy in each arrival is computed by squaring and summing its digitaltime series after filtering for the frequency band of interest.
Bandwidths and Center Frequencies
The center frequencies of the recursive filters were chosen to match thepeaks of the measured direct path energy spectrum. A measured energy spec-trum, which was averaged from 20 SUS charges detonated within 909 ±26 m,
is shown in the upper half of figure 5 with th( center frequencies and band-widths of the recuvsive bandpass filters. The geometric center frequency,bandwidth, and upper and lower effective frequency limits for each recursivefilter are listed in table 4. The digital recursive filters were five-poleButterworth filters. 1 1
The AUTOBUOYS used in this experiment were outfitted with processingfrequency pre-emphasis. In the experiment conducted prior to MA11LOBE, theAUTOBUOYS had been used for ambient noise measurements in which amplifiergain variation with a frequency range in the 20 to 1000 Hz regime is use-ful. Time did not permit the -emoval of the frequency pre-emphasis
*The upper water refracted arrival (resulting from a path totally refracted
near the ocean surface) wss also isolated for identification, but was notprocessed.
6. I- 1 *}**• • M" ":'". " •j--
. '• .. • ' • • , . -) . ..
TR 5781
circuit. prior to the MAINLOBE measurements. The effect of the pre-emphasisamplifier has been~ removed for the spectrum Shown in the lower half offigure 5. The combined effects of the preemphas is amplii fier and thealternating current line interference filteringt resulted in an effectivebroadband of 90 to 790 Hz. Note that although an ant ii-a iias ing analogfil ter with a 750 Htz cutoff frequency vas used, the pre-emphasia amplifiereffectively inc reased the cutoff frequency to 790 Hiz.
Table 4. Filter Prmeters Used in NarrowbandBottom L~oss Analysis
Conter hanidwidth Frequency Bounds ofFrequency (liz) (oct 0 3-dB Passband (Htz)
100 /?95.1 105.1177 1/. 157.7 198.7252 1/3 224.5 282.9325 1/3 287 .4 367.5445 1/1 :196.4 499.5600 1/3 534.5 673. 5745 1/t6 703.2 789.3
Accuracy of Prqopagat ion Loss and Bottoii/Grazing Angle lietermlination
As mentijoned pre~vi ous ly , the di rec t-path and hot toin-re Ilee ted PathI
propagation losses, together with the corresponding bottom grazing 4tngle, foreach explosive de tona tion, were do terminind by use of the NI SSM 11 computerray -t rae i g p rog ramt. To reduce, the reqjui red amount of c ompu t er itto rage, anldprogram procetss ing t ini, polynomtial1 express ions wort, fit ted to the Ni SSM 11output tiabli lilt ions * () PolynomialIs were &venerated as a I unict ionl ofhor izoota I range between the signal source and the rece iver for (I) thepr opagat ion loss o! each path and (2) the grazing angle for the hot toiinteracted path. To obtain two independent determinat ionls of horizontalrange Separa tion, two add it ional1 polynomti al functions were gene ratLed. Thef i Ist Was a funite t i on o f t itil Sepi-a'at iOnl be tweenl t he (Ii r-c t and bottominteracted arrivals and the second was a function of time Separation betweenthe di rect and surface re flec ted arriva1'4.
Thus, for each detonation, two independenrt estimates4 oit range weredotermin I nd. Those range es t mates c orvtesponded t to the tii -.v ttpa ratlIon tiltver-v ats ofI the dItroc t path 111d surface-ref1 c t-ed pathI at.r Iva Is andl t he d Irect'path and hot t oi- ref lee ted pa~t 11ita t va1 IS . Thelk A r It 1111e f Li' mentl o t tithe t wo ranigeest imates was then used in est imat ing the remaining paramteters (such asg rat'.ing angle) front the( evaluation of the corresponding Po lyntomialIexp resas i on. For 95 percent of the data, the differenrce betwe~en the nicanhoi izonta 1 range and its two associated values was less thani .t5 pe~rcent.The remaining 5 per-cent of the dat a had no more than ± 10 percent rangeerror. These di ff erences result from di fferences between the actual and theassumed detonation depth.
7
4 jts
TR 5781
For- vange dii ftf erences of less than t5 pereont ,the maximum var i at ioilin bottom gruting angle was ±0O.6 deg and the maximum variation in propaga-ton loss was ±0.2 dII. For raoige di f(erences of le-ss than~ ± 10 percent,
the MaxiMumi variationl in botrom grazing angle was ±1.3 deg and the maximumI variation ;it propagation losls was ±0.4 dIB.The above proceduire was moldified at ranges where the i'oper water-
re frac ted arr ival hi ould no longer be time il~olaced from the surface-relatedaryr ivalI. When ths i a ocurred, range was coimpu t:ed onlIy from the separationbetween the dire'ct and bot tomn pulses. This si tuat ion arose only tor hor i-zontal1 range separat ions greater than 28 kill, corre~spondi ng to reflIec tionstgrazing angl es of lessi than t) .S~ deg . G~enerall1y , the uipper refracted pathappe'ared only at horizontal ranges greater than 24 kml.
Tilt- souirce It-ewe for eati S US charge' del )Ilation w448 com11puted by adding
t he it I rec, t pa1th a Irri val 11broadbaitnd otenery to thet valtue of energy l ostit Ioug t hev di reck.t pa i th n 1) pretI ctd byl hV I SSM I11 . 1'lw predic Io vti tl rul N I ISSM IlI I itu~sed in Conl itunc t i onl with a broadband ener-gy meaesu remeat ; howeve. th iis doesno t p1resenoi tita p1robe b Iecause t t e lns tlai t i v i t y s tuld ies 8 showedi thIa t the4%r e i 8Si t t Ie f Ii ekiuiency dependence' in propagat. i oil pred ic t ions throuighoti! the 4JO to
790 lUz b)and i over, theit raiingev o f 0 t o 3 6 kml forv the' souitr ve!/ rec iv Cv vv ge ome t ryviliployed. If the. SUS, ource. level were conistant, the computted tiourc levt' Iwould also be consi An with ranlge', providing that the propagat ion prpdict ionis correct. For this experiment, the average' standard deviation of thecompuited souirce l evelI was le'st thlanl ±0.*8 dilt for all1 of thev data. I It wausnecessary to correct t he N I SSM I I prvopiagaktion p1red ic t i kin over at1 bri vtf ranige'lit v I. va I f or s t.a t i onls B- and -3. Th i 8 riunj ý' gene' ra 1I y ic c ir re'd a1 round t hit
reg ion whiere thtic d I rue t patt Illar r Novd aitt. hic A~l~lt~lh aIODt apt ,p rox I u'at o I v 00 . t hitpatth' a turn tng region . This. ilit e rviiI Was gene la 11 y loess I hanl ? kml andi onllyoccurr~ed at rantges greater tlu~ ha 2 m hecoI'Viec t onl Wils madeL by il It Or I gth Ui I SSMI 1 1 pred Icvý flou overI lv11 the ) p ob 1.1 em g rantge' i I literv I nt I I t lit, compu~ted(source v level Was tit ait 1st. i"a I V 0111111 I t 111oll 11 s tiult v v I 'Vo I s computt ed att t litothler'e raniges. 1
l101"'Mlt~ lO0SS RESULT~S
A omp lete set tit bot tom loss vl'rsuis grazinlg angleIt vturves Itor the dataloh tattned ait aill t 11roe, statiol is 0181coult a Ined In append ix h . Ce4,1t41111c ampeckt so f theit re tullIt s hkvev heenl p rev I ous, Ilv ropo r te d . 8 Vo or t hto pu u'post o I comp le vt e'-noss they arte Inc 1 udc-d (in thet to IIow lug d iskksciS onl. To p ro i dt' ilus igltinto0 t he natia tu auid c ha rac I er st ic o I tilhe bottom Loss cuirves , 11 t-imetsevrI vs s t r i vt it r ol th t hit ot t orn I lt erviit ionl arr1.ival IIs (II s vuksso' s Irt r4
NATURE OF THl BOTTOM'O ARR IVALS
'rhle complicated time ser ies st ructurve of a rece ived i-xPlottive signalthat has interacted once With the ocealn but thMn canl be simplified throuigh thetuse, of deconvolutiion. The' deconvoluttion process is used to determine the
4 ~~ocean bot tom itlpuil e' response, t hevebly, eliminating interfIerence e'f fec ts ofthle explIos ive's4 butbblev pu Ises.
TR 5781
The method of frequency domain deconvolution has been applied to theanalysis of bottom interacted signals when the acoustic source i& an explo-sive. 8,10,12,13 A simplified mathematical description of the deconvolu-tion process employed at NUSC is represented by
h(t) - F- I Y(f) X*(f) G(f(2IX(F)1 2 + A (2)
where
h(t) - impulse response of the ocean bottom,X(f) - Fourier transform of input signal (direct arrival),Y(f) - Fourier transform of output signal (bottom arrival),
A - additive white noise constant) andG(f) = Gaussian filter function
and where the operators F-1 { and X* denote, respectively, theinverse Fourier transform and the complex conjugate of the Fourier transformof the input signal. As described in a recent report, 8 a Gaussian filterfunction was used in the process to improve the SNR and a small fraction ofwhite noise was added to the direct arrival spectrum (denominator) toenhance the s.ability of the transfer function. 8 Since the Fourier trans-form of the impulse response represents the frequency function, the base tenlogarithm of the magnitude squared of the quantity within the brackets ofequation (2) is, in actuality, the ocean bottom loss as a function of fre-quency. However, to obtain a value of the transfer function, this quotientmust be normalized by a factor equivalent to the difference in propagationlosses associated with the two signals (i.e, the direct and bottom arrivals).
The effect of deconvolution can be seen in figure 6. The upper trace isrepresentative of a typical noiae-filtered reception. The shock and bubblepulses of the direct arrival are clearly defined. Because of bubble pulseinterference, it is possible to identify only the reflection from the ocean
*bottom interface boundary. However, in the deconvolved time series shown inthe lower trace, interference from bubble pulses has been eliminated bytransforming the acoustic waveform of the direct arrival of the explosivesource into a delta function. Thus, the direct path arrival appears as asingle spike. As such, additional receptions (representing the subbottomresponse to L delta function impulse stimulus) can be seen in this decon-volved trace.
An approach to identifying the mechanisms that produce the subbottomarrivals is shown in figure 7. Tn this figure, the time series of bottominteracted arrivals are displayed for eight consecutive values of the bottominterface reflection angle. Consecutive receptions are "stacked" along theordinate as a function of water-sediment interface grazing angle. Theuitprocessed data are shown on the left and the deconvolved data are shown onthe right. The deconvolved signals were low-pass filtered by a Gaussianfilter with 3-dB cutoff frequency at 250 Hz. Although the existence ofsubbottom arrivals is evident in the unprocessed data, their presence isdistorted by interference from the bubble pulses. With the elimination ofthis interference via deconvolution and the formation of the time historydisplay, the trend in the relative time displacement of the subbottomarrivals as a function of grazing angle becomes wore apparent.
9_ *_Il -,9I,,
TR 5781
Subbottom Reflection
The first subbottom arrival (see figure 7) was thought to be a reflec-
tion from a subbottom layer. If the layer thickness is assumed constant and
independent of range and the sound speed within the layer is also assumed
constant, then the layer thickness and sound speed of the layer can be computed.
Let "At" be the travel time difference obtained by subtracting the travel
time of the signal reflecting from the top of the layer (the water/sediment
interface) from the travel time of the signal reflecting fromthe bottom of
the layer. Let "0 " be the grazing angle at the water/sediment inter-
face. When the sediment layer is thin with the respect to the water layer,
it can be shown that
where
h = sediment layer thickness,
Cw 0 sound speed of water at the water/sediment int:erface,
Cs I sound speed of sediment layer, and
Og - grazing angle at water/sediment interface.
Letting
y * (A t) 2 ,
2
2hIx cos
2 9gan
m () 2
Equation 3 can then be expressed ai the linear equation,
y - mx + b. (4)
Figure 8 shows measured values of (At)2 versus cos 2 E) for 45
points at site BL-l over a range of 16.9 to 47.6 deg grazing angle. A least
squares linear fit was computed and resulted in values of h a 20.6 m and C.
- 1580.4 m/s. A comparison of these results with those from the boomerang
cores and archival data will be discussed later in this report.
10
_ _ _ __ _ _ _
- ~ ~ ~ ~ .. .....W~rr - ~ '
TR 5781
Subbottom Refraction (see figure 7)
The second subbottom arrival behaved in a manner peculiar to a refrac-ter' -ather than reflected, signal. The refracted signal did not occur atthe oigher grazing angles, but emerged at 26 deg grazing and converged withthe 'irnt subbottom reflected signal as the grazing angle decreased. Thisbehavior is characteristic of an acoustic signal traveling along a paththrough a medium whose SSP increases with depth.
The LDGO wide angle seismic measurements made during the experimentverified the existence of a sound-speed gradient in the sediment. Bryan andHoutz 5 report that the velocity in the upper 250 m of sediment can beexpressed as
V(t) - V0 + Kt, (5)
where
Vo - 1.52 km/s,
K - 2 km/s 2 , and
where t is the one way travel time of an acoustic signal propagating down-ward at normal incidence from the ocean/sediment interface. Equation (5)can be reexpressed so that sound speed is a function of depth rather than oftime-
V(z)- Vz) (+(6)
0
where z - depth.
2KWhen the term is small, equation (6) may be expanded as a
V2
0
Taylor series, with terms of order 2 and higher removed:
V(z) - Vo + gz
where
K
0
1. .......
------
TR 5781
For the values previously given, equation (7) is a reasonable approximation(2 percent error in sound speed to a depth of 300 m).
Travel time differences between the refracted and ocean/sediment inter-face reflected signals were measured for 29 points over a grazing anglerange of 14 to 26 deg at station BL-1. These values were compared withpredictions obtained using the Continuous Gradient Ray Tracing System II(CONGRATS 11) ray trace program.14 The SSP was given by equation (5),
where V0 M 1.52 km/s and K - 2 km/s2. Although modeled prediction
agreed reasonably well with the data, a better fit was obtained by account-ing for the previously discussed constant velocity layer and modifying theparameters Vo and K. The modified values of K and V0 are
K 2.16 km/s 2 ,
Vo 1.6 km/s, and, therefore,
g - 1.35 s-1.
Figure 9 shows the measured and predicted refraction/reflection travel timedifferences as a function of reflection grazing angle.
Frequency Dependence of ApparentAcoustic Sediment Layers
The above description of a relatively simple sediment structure consist-ing of a 20.6 m constant-velocity layer overlaying a sediment whose speedincreases linearly with depth was obtained from analysis of deconvolvedsediment interacted signals that were low-pass filtered at 250 Hz. As thefrequency passband is widened, the apparent acoustic sediment structurebecomes more complex. This observation is illustrated in figure 10.Filtered deconvolved sediment interacted signals are shown for five reflec-tion grazing angles. The signal from the first subbottom reflector, whichis clearly seen when filtered at fc - 500 Hz, reduces to background noiseat a cutoff frequency of 200 Hz. When the filtering frequency is 250 Hz,signals from two subbottom reflectors can be seen. However, as the grazingangle decreases, signals from the first subbottom reflector become weakerand vanish into background noise, while those of the second reflector remainsignificant. This is the reflector associated with the 20.6 m constant-speed layer previously described.
QUALITY OF DATA
The quality of experimental measurements can be degraded by systematicand random errors. Systematic error, generally characterized by biased . Vmeasurements, can be minimized through prudent experiment design and dataanalysis. Random error, however, results from the presence of noise in thedata and is usually unavoidable.
12
.................. ......
TR 5781
The experimental methodology requiring time-isolated bottom and directpath arrivals eliminates, or greatly reduces, certain forms of systematicand random errors inherent in the measurement of bottom loss. In particu-lar, errors caused by multi path interference and improper source level esti-mates are eliminated. 8 ,1 5 ,16 Errors attributed to improper estimation ofSUS detonation can also be significantly reduced.
One measure of the magnitude of random error in the data measurementis the SNR, defined here as:
SNR 10 logo (8)N
where
IS - intensity of signal andIN - ititensity of noise.
Because the direct and bottom interacted signals can never be trulyseparated from noise interference, a modified SNR (SNRn) is defined as
I S +SNR 10 lOgl- (9)
N
where
Is+N - intensity of signal plus noise
A noise sample was recorded prior to the detonation of each SUS charge.From these samples, intensity levels were computed in all the processingfrequency bands. Thus, for all bottom loss measurements, a signal-plus-uoise to noise ratio could be computed in all frequency bands for the directand bottom interacted arrival. The SNRm for the bottom interacted arrival
! iwas always less than that for the direct path arrival. For the processingbands centered at 177, 252, 325, 445, 600, and 745 Hz, the bottom-interactedarrival SNRm was, on the average, 11 dB or greater. The SNRm wasapproximately 9 dB in the broadband. For the narrowband centered at 100 Hz,the average SNRm was less than 4 dB. This lower value results because (1)the source signal spectrum level decreases rapidly for frequencies less thanthe bubble pulse frequency of 151 Hz (see figure 5), (2) the noise spectrumincreases with decreasing frequency, and (3) there is a large variance inthe low frequency noise resulting from the short time duration (approxi-mately 45 ms) of the arrivals. With the exception of the 100 Hz data, therelatively good SNRs are demonstrated by the "closeness of fit" of theindividual data points to the three points moving average curve shown in thebottom loss data in appendix B.
13
TR 5781
GEOMETRY DEPENDENCE OF BOTTOM LOSS
The effect of source/receiver geometry on bottom loss measurements can beobserved in the data acquired at station BL-l. A receiver (AUTOBUOY No. 1)at 3658 m and a second receiver (AUTOBUOY No. 2) at 3200 m reccrded theacoustic signals from the explosive charges detonated at 914 w. Simultaneouswater/sediment grazing angle coverage exists over the range of 8 to 34 deg.In figure 11, bottom loss computed from the 3200 m receiver (solid line) andthe 3658 m receiver (dashed line) are compared for two frequency bands. inboth bands, the correlation between receivers is excellent. In bothbands, between the 8 to 30 deg range the two curves are identical to a highdegree of statistical confidence. This agreement is significant because foreach data point, at a given grazing angle, th. bottom loss from the lowerbuoy was acquired using a different SUS charge from that used to acquire thebottom loss from the upper buoy. Furthermore, the area of sediment inter-action resulting in the bottom loss data point at a given grazing angle isdifferent for each buoy. Thus, the bottom/subbottom structure seems to beindependent of range for at least short distances (4.6 km or less). Also,the travel time differences between the subbottom and bottom arrivals arenearly the same fot both buoys. An analys.s of ray angles, using themodel profile given in figture 9, confirmed that the bottom/subbottoirarrival structure was nearly identical between the two buoys for a givenreflection grazing angle. Thus, a geometrically dependent bottom losbn,to the extent previously reported 8 (where the separation between receiverswas a greater percentage of water depth), did not occur.
FREQUENCY VARIATIONS OF BOTTOM LOSS
An example of typical frequency variations of bottom loss versus grazingangle is shown in figure 12. The dashed line represents the 3 point movingaverage at a center frequency of 177 Hz and the solid line represents the 3point moving average at a center frequency of 745 Hz. For all three stationsthe bottom loss generally decreased with inc-reasing frequency for grazingangles of 25 deg or greater, and tended to increase with increasing frequencyfor grazing angles of 25 deg or less.
The oscillations in bottom loss versus grazing angle seen in figures 11and 12, and throughout the narrowband bottom loss curves in appendix B, are aresult of spatially complex interference patterns created by the interactionof acoustic energy with the ocean bottom. The broadband processed data i(90-790 Hz) tends to average-out the narrower frequency band effects; there-
fore, the oscillating patterns are greatly reduced.mti
NEGATIVE BOTTOM LOSS
The 3 point moving average curve centered at 177 in figure 12 shows theoccurrence of negative bottom loss over the grazing range of 8 to 20 deg.Negative bottom loss was observed in about 75 percent of the 3 point movingaverage curves computed. As can be seen in appendix B, with the exception ofdata centered at 100 Hz, the level of negative bottom loss rarely exceeds-2 dB, occurs only intermittently, and generally is not observed for grazing
14
r -
TR 5781
angles of 20degorgreater. The observance of negative bottom loss has beenreported recently in other ocean bottom acoustical investigations and hasbeen attributed to the use ot the Rayleigh reflection model in the reductionof the data. 8 , 9 This model does not account for both refracted and non-plane wave reflected path signals that have been shown to exist in thedata. 8 ,9' 1 7 This interaction was previously described and is illustratedin figures 7 and 10. For the data reported here, negative bottom loss isapparent in the narrow bands, but is insignificant in the broadband wherethe effect has been averaged out because of the frequency diversity of thewider band.
GEOGRAPHICAL VARIATIONS OF BOTTOM LOSS
A compari'on of the broadband bottom-loss versus grazing angle dataobtained at all three geographical locations is presented in figure 13. Atstation BL-1, the data are representative of the combined results of the twoAUTOBUOY receiving systoms. The bottom-loss values at the three locationsare in excellent agreement over the entire measurement range. Because ofthis close agreement, the broadband data from all three locations, repre-senting 394 data points, were smoothed and fitted. These data are shown infigure 14, where the solid line represents a 6th order least squarepolynomial fit to the 394 data points. The dots represent the data averagedin 5-deg bins centered at 2.5 + 5n deg, n - 1,2,...12. The averaging wascomputed in linear space. Upper and lower bounds of one standard deviationhave been applied to the averaged data. The largest value of tihe standarddeviation was 1.1 dB. Thus, the broadband bottom loss is characterized by aloss of 5 dB at 62.5 deg, gradually rising to a maximum of about 7 dB at37.5 deg, and then smoothly decreasing to a minimum of approximately 1.3 dBaround 7.5 deg.
There was less agreement in the narrowband bot tom-loss data between thethree locations. This is attributed to slight changes in subbottom struc-ture affecting the complex frequency relationships in the interaction ofbottom and subbottom arrivals. The comparison of bottom loss at 177 and 74511z for all three locations is shown in figure 15. Variations of up to 10 dBcan be observed.
PRELIMINARY MODELING AND INTERPRETATION
Two sepirate methodologies can be applied to the problfm of modeling thebottom-loss measurements for the Hatteras Abyssal Plain. Since both empiri-cal and geophysical models have advantages and disadvantages, this dualapproach is necessary.
EMPIRICAL MODELING VIA POLYNOMIALS
The goal of empirical modeling is to approximate the data by a numericalfunction. This method can usually be implemented in a straight forwardmanner. However, it offers no explanation of the mechanisms that cause thebottom loss. Thus, the model cannot be extrapolated beyond the range of the
15 i
Si!~
TR 5781
data. The bottom loss data in this report have been fitted to 6th orderpolynomials. Tabulations and illustrations of the resultant polynomialexp-essions are contained in appendix C. The polynomials allow the modelerto compute oottom loss in decibels as a function of grazing angle for eachfrequency band of each buoy at each station, for the combined buoys atstationBL-I, and for the combined data of the three stations (BL-i, -2, and -3).
INPUT PARAMETERS FOR AGEOPHYSICAL MODEL
A geophysical model attempts to simulate mechanisms causing bottomloss. The model requires a theory adequate to .explain the interaction ofacoustic pressure in the bottom and subbottom. These types of mod-Xs requireinput plarameters such as the sediment thickness, density, attenuation, soundspeed, and sound-speed gradient of each effective subbottom layer.
Some of the parameters that could be used to model the bottom loss atstation BL-1 have been derived. A brief discussion of these parameters andvariations in their measurement follows.
The central region of the Hatteras Abyssal Plain is characterized bysilts interstratified with clay. 1 8 The total sediment overlaying thebasement is approximately 2.1 km, which is considerably thicker than theaverage 1-km sediment thickness in the North Atlantic. 9
Earlier in this report (see figure 9) a partial geophysical descriptionof the subbottom was given, describing it as consisting of a layer of con-stant velocity sediment overlaying a layer where sound speed increasedlinearly with depth. The speed of sound computed for the first layer was1580 m/s. For the same area, Horn, et al., report 1 8 an average soundspeed computed from a mean grain size of 1572 m/s (corrected for depth andtemperature) in the upper 3.5 m of sediment. The two values of sound speedaveraged from the boomerang cores to the north of station BL-l were higher(1617 and 1609 m/s). The average sediment densities measured from the coreswere 1.13 amd 1.30 gm/cm3 . Horn et al. predicted 1 8 a density of 1.77gm/cm3 . The second sediment layer was characterized by the linear-with-depth SSP:
V(z) - Vo + gz (10)
where
SV= 1600 m/s,
g = 1.35 s-1, and
16
TR 5781
where z is the depth in meters refeienced to the boundary with the firstsediment layer. This description is valid to a depth of approximately 145 mbelow the water/sediment interface, as this was the turning depth of thedeepest refracted ray measured.
The linear-with-depth gradient can be compared with averaged seismicmeasurements. As previously discussed, the seismic measurements describethe velocity in the sediment as linear with reflection time, T, referencedto the water sediment interface. The expression for all seismic tracks wasgiven in equation (5). Following the approximations discussed in equatiitns(5) and (6) a K of 2 km/s 2 can be approximated by a g of 1.32s8. Houtz20has indicated that a value of Vo - 1.52 km/i may be unrealistically low forAbyssal Plain turbidities and, hence, alternate values of Vo - 1.55 km/s andk - 1.75 km/s 2 should be used. This would lead to an approximate linear(with depth) gradient of 1.11 s-1. Boomerang core data and deconvolvedrecords tend to support the alternate value of Vo. Seismic measurements aremade using methods yielding good results at depths deep in the sediments,but are less accurate at and near the ocean/bottom interface. The bestresolution available in the MAINLOBE seismic measurements is approximately200 m. The parameters derived from the deconvolved signals have much finerresolution (roughly 5 m), but are only valid to about 145 m below the ocean/sediment interface.
SUMMARY AND CONCLUSIONS
Pro ect M.AINLOBE ocean-bottom-loss experiments conducted by NIISC andLDDGO in the Hatteras Abyssal Plain of the Atlantic Ocean have been reported"and the results have been presented in their entirety. Five significant ob-servations arising from the analysis of these results are that:
0 Bottom loss measurements were acquired using a self-calibration techniquein which direct and bottom arrivals were time isolated from all otherarrivals, thereby precluding multipath interference. As a result, thedata exhibited excellent agreement over adjacent but independentmeasurements.
o Time coincident interaction of the ocean-bottom reflection and refrac-lions, which are not ascribed by the Rayleigh model in the reduction ofthe acoustic data, resulted in negative values of bottom loss over alimited range of frequencies and grazing angles.
* A vertical change of 358 m in receiver depth had little measurableeffect on the bottom loss results for the geometry and environmentalconditions encountered during these experiments.
* Broadband (90-790 Hz) bottom loss from the three statr -is. spacedover an interval of 1 deg of latitude, showed considerable similarity.A smoothed curve of the combined stations broadband bottom loss hada standard deviation of the order of I dB.
* Narrowband (1/3 octave or less) bottom loss showed less similaritybetween stations. This effect is the result of small changes in sedl-ment layer structure between stations.
TR 5781
In addition, bottom-interacted arrivals at station BL-1 were d"con-volved to obtain the sediment impulse response, resulting in the isolationand identification of reflected and refracted arrivals. A geophysicaldescriptioa of the subbottom was abstracted from studies of subbottom/bottom arrival time differences as a function of grazing angle. Forfrequencies less than 250 Hz, this description consisted of a 21 mconstant sound speed layer overlaying a layer where sound speed increaseslinearly with depth. The derived sound speed gradient (1.35 a-1) ofthis layer was similar to the equivalent gradient (1.11 s-l)'obtainedby concurrent independent seismic studies.
The above geophysical description can be used as an input to a bottomloss model. The output of such a model can then be validated by comparisonwith the bottom loss results reported for station BL-1. Because of thesignificant contribution of the subbottom reflections and refractions, itis reconmmended that the bottom loss model use the geophysical description ofa layered bottom with sound speed gradients.
18
L- Z" " • ,
TR 5781
i I
I'I'
LBL3 700
28892869 30'
•~- 2874
S2871
2864 FATHOMS
28586L-
BL-2 -30'2876
2850
1. 288
1/
e AUTOBUOY DEPLOYMENT LOCATIONSHIP TRACK DURING BOTTOM LOSSMEASUREMENT
- - SEISMIC PROFILING TRACK
01 BOOMERANG CORE LOCATIONS
Figure 1. Operations Area for Hatteras Abyssal Plain LowFrequ6ncy Bottom Loss Measurements
19
L
TR 5781
0 o
CIO 00CL& 1 0
444 41S00c
4 -1~
iL L
Kt~ U,
202E m
TR 5781 *
a. V
00
L) c)
U,)00
03 L0
> D U)
CI
44
w00
40 0N LU
0~0 tCL
_________z %..,U.Z zc
LU >- crL+L) Lu W
0 L/) Lf)
TR 5781
4J
00
00~0
I.-)40C\
ccLU9
A'0 0 :
w 4 J
CD
u c
0 Uw 0
w +w
O coU, ) >'
0 22
'Iw
-. .. . ,. . . ... ,,,,..,.4,...,•,t
TR 5781
ILI
CL a.
00
V)V
UV)
LU ýA
0)~ LLI"4-.
CI0
CI44
23
TR 5781
00
Lr: a:0
LL U
LUZU00
Cý > U D LL
uJ
DL0U U
a >007 Lu L)ai LL LI 'Zj LU LU i
TR 5781
0u Z02 0
0 w 0
(.) cr
m 41~c
00 Cd 4-
mU,
00
0th
LU Cd 0
-i 4J
ca u L
(Oop 41N (NI1)
0 M 25
> 0 -
TR 5781
o LI)o0
4J
M4-J
t* 0
04-
c4-1
U) +z- 0
4-i (
04,z .~0U
Li)
ul~ 1' C)LtOtic
Ot NI(IIH(4-4 A I
26I.' IN s
TR 5781
IT t.AHu
0 >0
20
UU
0aw
Q 4)
iiLL e
w0U
w
ww
(ol) 3Y4U1
27
......
TR 5781
z0
W 0CcI
w N
w0z
w- cJw 01
a) 0
j 0 W
0 0 J.It
_ z 0 1Z~~ LLi,.
w go-Nz 0-
w 4-J
o 00 (
0 0b
wI N 0u 04 Cd C4
06p k1N NZ~
28 "
z'
Tfl 5781
-- 3200 m RECEIVER --- 3658 m RECEIVER
20 1 I I
mc a 177 Hz15 (1/3 Octave)
1000
-6
0 15 30 45 60 75 90
20
tc -745 Hz15 (- Octave)
10-
0 5 - L!
0
-5
0 1 30 45 60 75 - 0GRAZING ANGLE (deg)
Figure 11. Comparison of Bottom Loss Versus Grazing Angle as u Functionof Receiver Depth (Station BL-1)
29
TR 5781
0 0
- -fN N It,
w•I I" :
w ILccI I
a:,.a
"" "cn 0CO - z
S(,(
0U 0
zz0 "0
4-
0
o
0 z
I-I
/i 0
0
0 UI.
6.i
TR 5781
co o mI *I I' I •
0 00
,4
LU a
0z LU
33;
0 0Dz
0
0
0 0
cc -4CID
V.
o LO
LO 0 LO
(ap) so-I 40110
31
TR 5781
cc 0 >-~0 u.j
0 cc c0 0 0
-J QU.> 0 .LL~4 V)0
0I- -0O"4
N 4-1 -4
z HHco LJJ
o z
V) zZ
00
00
0L '-4 +.)
-,4
I..;C ) LO C)O
(eP) ssol V401108
32
TR 5781
............. STATION BL 1
- STATION BL-2
---- STATION BL.320 I 1
fc 177 Hz
4,415 (1/ Octave) I
10.
Q)
S 0 , . ,/5 1
o 0
-10 I • ,0 15 30 45 60 75 90
20 I
fc= 745 Hz
15 - Octave)
S10 i
0
-5
to 0
-10 I0 15 30 45 60 7 90
GRAZING ANGLE (deg)
Figire 15. Geographical Variations in Bottom Loss (Narrowband)
33
TR 5781
REFERENCES
1. R. S. Gozzo and R. L. Martin, AUTOBUOY, Present Capabilities andPlanned Modifications, NUSC Technical Report 4505, June 1973(UNCLASSIFIED).
2. X. LePichon, J. Ewirng, and R. E. Houtz, "Deep Sea Sediment VelocityDeterminations Made While Reflection Profiling," Journal of GeophysicalResearch, vol. 73, no. 8, 1968, pp. 2597-2614.
3. H. Weinberg, Navy Interim Surface Ship Model (NISSM) II, NUSC TechnicalReport 4527, November 1973 (UNCLASSIFIED).
4. R. E. Houtz, "Preliminary Study of Global Sediment Sound Velocities fromSonobuoy Data," from Physics of Sound in Marine Sediments, ed. LloydHampton, Plenum Pub. Co., N.Y., N.Y.
5. R. E. Houtz and G. M. Bryan, "Determination of Near-Surface VelocityFunctions From Artemis Sonobuoy Data," (unpublished manuscript).
6. C. C. Tyndale, "Instruction Manual Model 1890 Boomerang Sediment CorerIM1890,"' Benthos, Inc., MA, November 19, 1968.
7. S. R. Santaniello and R. K. Dullea, "MAINLOBE '73 Research Cruise Trip,"NUSC Technical Memorandum TALL-203-73, 18 July 1973.
8. S. R. Santaniello, F. R. DiNapoli, R. K. Dullea, and P. D. Herstein, ASynopsis of Studies on the Interaction of Low Frequency Acoustic Signalswith the Ocean Bottom, NUSC Technical Document 5337, July 1976(UNCLASSIFIED).
9. S. R. Santianiello and P. D. Herstein, Labrador Basin Low FrequencyBottom Loss Measurements, NUSC Technical Report 4711, 12 March 1975TUN-CLASSIFIED).
10. S. R. van der Veen and S. R. Santaniello, Digital Processing ofExplosive-Source Ocean-Bottom-Reflected Acoustic Signals, NUSC TechnicalReport 4337, 9 August 1972 (UNCLASSIFIED).
11. S. R. van der Veen, "A Program to Simulate Butterworth Filters on aDigital Computer, "NUSC Technical Memorandum 2211-309-70, 1 October1970.
12. J. M. Hoven, "Deconvolution for Removing the Effects of Bubble Pulses ofExplosive Charges, JASA, Vol. 47, No. 1, 1970, pp. 281-284.
13. R. L. Dicus, "Synthetic Deconvolution of Explosive Source Acoustic - !Signals in Colored Noise," Naval Oceanographic Office, Technical Note6130-3-76.
34
TR 5781
14. J. S. Cohen and L. T. Einstein, Continuous Gradient Ray Tracing System(CONGRATS) I1: Eigenray Processing Programs, NUSC Technical Report 1069.
15. S. R. Santaniello, "Factors to Consider when Measuring Low FrequencyBottom Loss," NUSC TM TALL-50-76, 9 February 1976.
16. J. S. Hanna, "Some Complications in the Traditional Measurements ofBottom Loss," Science Applications, Inc., Report SAI-76-664-WA, November1976.
17. D. C. Stickler, "Negative Bottom Loss Critical Angle Shift, and theInterpretation of the Bottom Reflection Coefficient, JASA, Vol. 61, No.3 March 1977, pp. 707-710.
18. D. R, Horn, M. Ewing, B. H. Horn, and M. N. Delach, A Prediction ofSonic Properties of Deep-Sea Cores, Hatteras Abyssal Plain and Environs,Technical Report No. 1, CU-1-69 NAVSHIPS N00024-69-C-1l84, November 1969.
19. M. Ewing, G. Carpenter, C. Windisch, and J. Ewing, "Sediment Distribu-tion in the Oceans: The Atlantic," Geological Society of AmericaBulletin, Vol. 84, January 1973, pp. 71-88.
20. R. G. Houtz, personal communication, 5 September 1973.
-3
r
TR 5781
Appendix A
SOUND SPEED VERSUS DEPTH PROFILES
Results of the deep velocimeter casts are presented in figures A-ithrough A-5. Separate profiles were obtained as the velocimeter was lowered(down cast) and raised (up cast). Note that the velocimeter casts neverreached bottom depths. The sound speed profile (SSP) was linearly extra-polated to the ocean bottom to obtain the full water column profile. TableA-i lists the relevant parameter for each profile.
Table A-I. Sound Speed Profile Parameters
Figure No. Station No. Cast Actual Depth (m)
A-I BL-i Down 5600A-2 BL-i Up 5600A-3 BL-2 Down 5600A-4 BL-3 Down 5439
i A-5 BL-3 Up 5439
A-1
TR 5781
VELOCITY (km/s)
1.49 1.51 1.53 1.55
11
2
.i.
E
[II
3
A- 2
TR 5781
VELOCITY (kmls)
1.49 1.51 1.53 1.55
' A.2zr
w
3
5
I,'•A-
'I'R 5781
VELOCITY (km/s)
1.49 1.51 1.53 1.55
A-3
2
E
3
4
5
A-4
.........
TR 5781
14151VELOCITY (km/s)
1.49 1.51 1.53 1.55
•+ ~A-4_
2
4
5
A-S
¼;.... ......... . ....... ..... - " - -......... J'+flS,2'i
- . •..r .. r -P • t ri n r • .,= .'• • . r" . '.. •: : ,•• ,•.•• . .*.+,. ,,•: ,• . .-, • :, •;, ; . .,• ._ ¢•:. • - .,;.•.: , , + -..f:7 , "V, : , :.z •• +
'I'R 5781
VELOCITY (km/s)
1.49 1.51 1.53 1.55
A-5-
2
E
3 -
4
"51
A-6
TR 5781
Appendix B
PLOTS OF BOTTOM LOSS VERSUS GRAZING ANGLE(ALL STATIONS AND FP.EQUENCIES)
Table B-i provides the key to the conditions during the bottom lossversus grazing angle depicted by the figures in this appendix.
Table B-1. Bottom Loss Versus Grazing Angle Data For All Stations and Frequencies
Figure No.. Station No. Geometry Receiver Depth NotesSource Depth (W) (W)
B-1 through B-8 BL-1 914 3200
B-9 through B-16 BL-i 914 3658
B-17 through B-24 BL-i 914 3658 Expanded Scale.
B-25 through B-32 BL-i 914 3658 + 3200 Combined Receivers
8-33 through 8-40 BL-2 914 3353
B-41 through B-48 BL-3 91b, 3353 IB-49 through B-56 BL-3 914 3353 Expanded Scales
B-57 through B-64 EL-i, 2, +3 914 3200, 3353, +1658 Combined Stations
B-1
'IR 5781
LI x
Ln
I I W MIA N I
CE 0
LLJ co~ n
C) 1-4 M0
NJ -4 a I-M.
N 0
N 0 Nn 0 n 0 0 00 0 0 I 2 u
0 Nu I -
n Icc) i
LO to.
Lj 0
0 W C u
m c
< zI-.-- L
IML. I w
CD.4 1 0
0 M.. tm Iu0.4 N
Ln IO0Ln aru 2 1ki80NJ SSO W 188 JSSlwlo
B-2
TR 5781
ZZ
- 3
u* 0
z m
Z o- .m -
LO c
LiJO
C -i-+rCO'
C4 Wa
0 I., w - lN n a Ut a U C UinU 0 W
& 0
C~nin
010ru I-
O0 -I - -O WNiG6 I SIWI
'rR 5781
+u
LU 2 z
zLU Z m
LU - -
UK U' C
- f0 a - - a
C
C 'ZC- XC;C
00U
(I-
0~ 0- ~WI W-
zzN
Lr) ~ ~ mr n - 0lLUJm
z Not 040
In N -n -ni
cz - I 7-0 KI SSIWIK 0N IW10
B-4
TR 5781
-~~ #a - - - - a 3
- a
a:a
0LOi
z mj
Z~ o
(DW~ ~ in in0-_ _ i
Ul co
>N
Zl o*~~~~~~L N n a- - - a C
COC
co 0
Z a a ZUo al
in im.a
a I
- ~3 7
5:. -%a - --p"wt
80 N SSI WOJOG60 I SSI W115
B _.
TR 5781
W x
In -
I.JfJ N ICN.
IU-
LA It-
Z CD
z in atn co->
I iin0t_ _
CO C) , C
z z u0-'N U.1 N
m Zs
- IIini - q In- UM- x
IDw
TR 5781
U. _______ ________
- - - -_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ U,
0 - .~.-.oa
w P o -- - -
U. J 0
ILU -. -j
0 zI-In
Ui 00C
OtD -o In
Zo
N o CD - u w CD
g0 141 SSOI wollcs 80 NI SSOI Woijoe
>0
W LN
m 0 0
z z
00
-. 1 N w
90 NI SSOI W01108 80 NJ SSOI Wolloo
B-7
TR 5781
1'.'OD
C, x. . .
U-
Li ts 0( t:-U
U9 IS. C) il 0C
TrR S781
K. in
UI- *-j w
w ca0~ ID
I0 0
Iu In.
Lnn 0(.) nu.
..
00
Kn 0
Ln za In 0 IIn
Lnin
040
m 2 In~00 N I S0 ol-...N.SO
w o
I-. K9
TR 5781
LLO
-LI U, w
t-j
(-) -- D -
LJ mJ
-D m-- --
-- - -. -
<
I r
r t90 N1 SSOI WOIIO8 90 N1 SSOI WOLL1E8
z al
In C)
Ifl 01
0 Kl
to
co U,
(U
L fl l
K I..
80 ~ ~ ~ C NISO W10K 0 NI1
KS
- W02
K- 10 - -
TR 5781
in In - 0
I- ain x-to
u44
0 N 0
.4 z
U. 1 I n 03c
C (U
80 N- 8 I S501 W01108 GO NJ SSO1 WO I 8
z a__ -V) o C" - -" - 0
u, a)
IA u
0 0 N*
z m
-n In xna
I.- Z4
.4 .9
Q .4A-~-~-~..U ~-MU
.i4 .4T
L c~a i A a o U I(U f u --
80 NI SS0l 140108 S0 NI SS01 WOi±C9
TR 5781
I In
L) Lii-~- --- - - -- - ------
~W
-~i In 2(
3w
LAJ
*4 N i
LAOJ K
LAJ W
401
z m1
V: -n-
N - Ill 02n:L I n 0 tLA ft - - 7_ cu-~W .80~ ~ ~ N- SSIW1088 1SSIW10
zV) CD a
>oC
0 w - -0z tor-- - LL N 4
*4 -*4~t m40*
*4 - *
*4 (x~- ~2f-
*4*4 4 a
*4J *4 :
- co Ca - -0 n C U ) CC U ) C U
Cu E to U
90o PISO O499 ISS1w~
B.-12
TR 5781
InnC,0
ui T0
6P
a:w a
Lj.J M 4 2
- -i - _OI
(D m
-m - a-
N in 0 In a in a a 411 0 In a in< CD u - I - flJ - - I -
0D 80 NI SSOI WOJIOB 80 NJ SSOI WO±±08
z 0- 0
>0
cow
MS
z -O
in in- - -
ot
N N!
inuN_
in 0 in a in aa i a i n a
60 NI SSOI W01108 90 NI $801 W01109
B-13
I'R 5781
N I
I -K
y Nd m z.m
-J (D M
z m,
Kn c
cJw U--
0 C3
LaY z 3
InIr
00 NI SS01 WOIIOS 80 NI 5501 WOiIOS
B01
L a U, U
TR 5781
a:a
Lai - -
Ul m
N (U 0D co fu co 4 U 0
ea G NI SSOI w0±±08 90 NI SSOI WO1L.08z - -- -t
>0
Ln a)
ai.
TR 5781
4 L,LI r, %I
K K o
M K
0
VC CU - Iu
00 N SSO WOIIS 80NI SSOI1401108~
0
0n 0$i OW (I
Ku
0 -QC)K
K z to (7
oo K U
0 U 0
ur
U4 K -4
0 -~ 0 O
ma NI SSO1 W01108 90 NI SSOI W01108
B-l16
fl~.A ..., ...
TR 5781
co zI
.40 N 0I
z
.04
0s 0 n
oA. -
a I79E0 NI 9901I WOL108 80 NI 9501 WOLIOU0
LI)
A L U ) -':
-to LI'v'w w wI* iJLI0 ý -1 14'0
a.i
.4k."t.- I w F '4. 7)P ~-- C
.4 -J
44 a.-~ J~X
-~ .4~ .42
HO N: SL) li)ii 1 o I S;O IW II
4 .4 .54 1-I ~ Reverse Blank
TR 5781
Appendix C
SIXTH-ORDEr, POLYNOMIAL REPRESENTATIONSOF BOTTOM LOSS DATA
The sixth-order polynomial curves, which are shown in figures C-Ithrou&h C-32, were fitted to the corresponding three-point moving averagecurves of the bottom-loss data presented in appendix B. At station BL-i thedata from the combined AUTOBUOY receivers have been used in forming thepolynomials given in table C-I. The polynomial expression for thedetermination of bottom-loss as a function of grazing angle 8 is given by
BL(Q) X0 + XlE + X20 2 + • • . +X686 ' (C-1)
where
BL - bottom loss (dB),0- bottom grazing angle (deg), andXI a constants of polynomial expansion (i - 0, 1, 2,,..6).
C-1
-... . ....... ....... jkab.-,.,4
. . I]
TR 5781
+ + I I I . I I I II w ww ' ('IN(NC
'D , a C7 ' -i-i N a W 'D ~'o W
- Q%0~t N -0 fn m -.N m r-.%
0 ~ ~ a 0.. 44 0'- * 0*-'o r"- w -4 ý r- wN r ~ -4 r- W-f'-- C~m a.
ji bCj f- - -mv - '%L 1o o 00
. ~ . . . . . .- .a . .~La0 + I +N4.~ I~
o: 0. 0, 0 on. 1i0 0 'La.~~ ~ +O4~ +OL. ' ~
4J~~~u *.- w- W,~N-4' W, WOc -?AN VNW
4 -4 00 - C4 I I I ." m T'I "r ia ww 1 N 0 -L 0 LA 0 m C D1 , i
04. .0 cO U nLi 0 ( V
44 0
-c"% '0. % L '"NI-- C14 C, J4 1 --
C.)~~ c 4 1 1++F. cc o oo 0C'C00 C+4 + + I I 1 + +w w w IO-COC' I *IIwulu a U
rN- LCftC OF' 0~ C.' (-'% '(' C11 (1'f- 04. r-
.0 C1 fI 01 I+ n (I in I 4
ON I0 fUKo K~i Nc7% rC-2 it 0C11 4 ViC -C t
TR 5781
OTQ 0000 T00
WWWWW WI~C~1a w a ta Law
LA PON -4 0%44~O"
O'N- 00 00-W4C %.O 'D "-4 %DN% en c-cn -4'. %D ~ * 'C0% O0~
C4 r CoGo0N 60 ý&. crO 0
fn N 0 -* -4 0 -4
IIN-40-(4C4 rý ~' 4 w- 4 0-.
00-00 0 U%00 9u DU%7% 'sw 00 0 0
w1 -ý a%-0 Dr - -
w V-) VN0% r-400 0Co 4 4N-. Y
a -4 0 r, -un Ln 14 %00
* a- * '.0'O0VIN 0 0%*
LA. uq4-u~0C 00b f00"'
000CA -- -+ + + I + I I I + +1
to4 --1' 1-7 ,L fl'
I' - 00nO0 L- %KN r4V O 1% I
0 0 0000 4aý000' e 0 40 ONID00
CL, i -4 -- N 0 L',W414 0 . Nn r" 4 4a 0% NI ýtv 0 .
C-4 -D M 00~
0~~ +00* 4004' ~ . N-0t4
00 C-C).~40 0 0 0
.. aQ an r - r- 4 C 4a
(I nIt0 - u .
-t. M. _4 M C4 mC L
ON r- 0 D
a - 000000 (7 ' mv' n 0 n oC, U" I' -4 + a aN a -. 41
+ +
-~41 -0 UA-0'Ojs N0
V- 000 04.f'. &) 4tLa
61.
Uc U
TR 5781
000 00 000 00
t0 eqIz m~ Ual% mN
W . -4 0 '. c N %D'. ý k m 0 m~ 40 '.0 N NJ\
e-a M ON r- N ONC4%4-r---4 -4 -4
X .1
0 -. 4 N'..0 NoaN N0. r'I 6 r ~ 4- =0 1- Mn lAC-4n.0- m 0Lr N
44 NJ 4 CJ 1-4 0 -4 W M MW W(7, L11
-41
U)~
'~~~~CD b0 -4 0 0 0 0
+ I IGo 1 l 3 4w w
14It1 c N -000
t-C.) 0 00000 - oC4mL-t60 00-D 0000 40-4 t -
1, I - N IL M 'D N
Lii
000
C--4
TR 5781
N-GO ~ m u'hF . 0 Cý4 0 ý0Q 00 00 09% f mm%0 0000 f
-1P N 0 . N ý VIN a co af 0%0
CP 4% I r 1 U -4-N~ -- r- N CN * 00 to-V- r-04 ' 00 C-4 r N0 1 r, fn M
0U.O- CO 0t0 0UI4*~ ~ + >~*~ ~ ~ O c C)
'.4 N %D W 1I I I+
:0 04 M .
M LO) V1 " UtN) . , S0i 000 U W Ca14~a~~4 %0 r- 0- o0% 0
W . t .0ý Io uC 4 irN 4 w r-'C r- 0 'D'U 0C. 'D0O, %0 rto N- M~ W 00u iN.C 1r' 4 %0 ni0 It t N t -
U40 ,0r - * 4- 0 -= w 'Or~4u 07 m .'OC~ 4'C' bO -' 0 10w- 'a' 0 O Nc' M0-4 0CCi .or, 6-% 4N4'o% 4VC: 4 co 4 I-ý m~ %0000 . " 0, 1-1 0 O~4 ' 0 u W -4*00 -0 0 Wi 1~'~ -4( Cia r'!.4~- 4 ' -6' 10
00 1 +1 I +1 .. W)4.4) Io 4 'V r. I
w C go 0-4
in .- n 0 '-0-c~ r-- N -4 0- 1 m 61 r'- 0C0 ca N*-4U (A++ I II � ++ +II "-4 V) (A4-4
0~ U) '0 Lww 0 w L4wLwiwLL w0 0 00U)~e 03 0) NC)
01' 0 M' W 4 -104-40- N4 I -C"0-4c- 0 -4 > V>0) *.4 CC0 u I iD 4' r'-00" en 47, It C7 - co M 0 -4 V)
Q4V i 0 -4 0%~ a' ( 0 C" N 00 4 CO -i -1 0 't 00 ai en- m. ~W ' CA tio -4 C% 10 -1 U-1 "-. 4ro- in 4 u")4r')W -1 0 r'0 >40-
0W3 0 -01 "- -4 "ON'4 0'C'D ' * 144 Lt -- 0 if 0 '.4u0o war 0- at 0 W -i c"M r 7 C4i -e 0 1
41~ 0 - 0 w +) +4o AC
to - 0 0'-
m4 r3 'w 0.'- -4' * 1
u- 0 >'
0C) 0.' .'. 00 "4 in Vr- i
+ + IIO - U) + j (
0))m~~~ a-mw' ,' % I a . N UU)
a' % I y 0I r- Co -tm1 00m-M (-'U r4 in r- r--'It e' 00'w'aw 0 N
-A 0 aa'" " m.fl4 - N4 00 01 i 7 o ý &00 LN C00'0 c'aN - o 0 r- M f -4r- f- ~01 -0a' %C 0,4 -4 ul E
IV 0 CO It CA C4 I- C) 4 U N' -0 D O M OD) N It A.) V 4-10m- 10 C" I cD N- CO %0 0 in D -10O0 N- 0. '4 i
0 C).40'''C t- .' 'in C-4 0 rC 0 N. " (13
U: U, 0. Vr
V 0 V, Zk on 1-4 v14
V) r)'. . 014- c4- V- ) . 04g44
'- 0 '4 La- c"- 't n '4.4 X :. 4XXu XXX X-
c-5
TR 5781
LOi
z0-zo
-j0 0
z L)
< (
LL.J
N 0CD 0
r- - . .- L
0> C;) CDI zz
Lfl 00(tflCUOJ>' C
0 < N
CD
0 -ZI 0**
80D NI Sm1
0-
C-6
TR 5781
*J x
- 0
z0-
zoM -
r--J
LLAJ
wN %
< D0 on
Lfl 000 0 -1
C)
Ln CU >~ z
CD 0
M >
00
0 Z EM- 0"
TR 5781
CC0-n
zO-zLi X
ojjcr Cq
Z J Q--LUn
z 0
N
Lj m~oL
o o
L-ii
< CD
LU LU
>' LfD oDLl
'm 4IS1WiO
C-8C D ~
Lnb c. > . . - - - -
TR 5781
t-n
1,a:
U00
LAJ rz0-Zo
a z - nA
N wCDN 0
Sr-~ LuLJu z
(n ~00 cc\> CD030
>O CU z.0 <
C) _j 0- D
c) >U CU0 11
M O C,)
~-m >-0"
I-j-
oz
0-
-p-
TR 5781
LID_ _ _ __ _ _ _ _ _ __ _ _ _ _
to
> id
z Qr-
z CD~__ -
Cfl1 0 1. -J
z L)(
0 z L0
NN
0
U')00 0 c
m )
0 Z Lf 0Lf
( U C -I
TR 5781
LOix
C- 0
z 0
0' 0Qo
u CL 0)
N L I
0 to1~
'l - Li-
a) 0> 0 z
00
2- 1
00
F-rn>'~C- I *t-.
TR 5781
_____ ___ ____ __CD
-'Pa
zto
_ _ _
.- J M11
_j r 03
Lo Ix-
C) C' P
CO 0 C3 -
> CD c00
ýn CU >~
ND CD
0 C3.- m > LO
~Z ZmJ 0 .
'rR 5781
Lf)
LtJ> Li
-z0wd m >
z 0 Ns
Lj~
0 F-
CD 0
a z Lz
N NiCD QD 0
r- 0"i
> iD ) z)
-0
oC:)
0 UZ X:,0 lC
M0 NI SSLL~±
C-i
-. ~~~~~~ w--±-----,±-..
TR 5781
Li
Li L
LL~J vu .
LJh
CD CD
0 0 z
z E uzNN
00*~
>- >z- 0
I-4
Li.l
Cu Z Q
Ir -
n-Ir,1
0
C-14
TR 5781
mLoJwLAJ
L 0
LAJ
00J 0
1: 0
0LJr.1 Z0M0
z C) 0
% 4
z- 0"-
> z
0 CIm >iY .
0h
c-i
C-j5
TR 5781
c- 0
Li
LAJ~
cc 0 aL
Lai-
zLJ
_ _ _ _
M -
Z M CL c
< I T
(D Z'L
C) L41
Fz
LL-J
>f m CD
U- x
L) 00
mc
-L I-
c-i
'Wpmmm I -
TR 5781
(0
LAJ
Z 0-
TR 5781
LiWwLJJ
00cr.I
LiJ
z
.AJ
a0
< 0 0 *r 0.jfu
> CD J
00
< N
LO 00jQ
00m
00oz
cn 1- Sn
FL .-- -. Lf
tL-)L CD PC
80 NI SSOI W01106
C-18
TR 5781
r-
LLJw
0:!r
u 0
-r C.)LdJ
LOJ re
z Mn c
LLAJ
zc~ LhJr4) %
00
z z-cn C: 0
cuu
U')
C-1
'FR 5781
L~J
L&J
LAJ 0
LU 0
LU ICD0 m
L.
-LU
0 ~L.
Q h. -In U
cy-I
0 zz I
Ln 00 I>z
-n (D
00
o0
00
C) r' 0*M
.)W
Cl[1
0
El N 1 5 5 0 WOl I I H
C-20
TR S781
>cr
Li0
LLI 0
Li
LU 0
-A M >-J
LLJJ
_j -ru cN 0w
C)C
-n 0
0
0o -,IzC
0 z
M0~
ClC)
Ln 17 )UlC .L ui
8(1 NISz WiO
C-2
TR 57181
Ujw
LAJ0
u cr
N L 0 LrJ
zzL.0
-JJ
z Vo :3L
r4j -)
z 0iL- C:)0
0-JD
z0-*
>f Co
00 NI a:1woi
co,
C-L2
TR 5781
LhLAJ00
crm
z
Z MLC C
zz :9N in0
.ci nCD 0
> 0 0 ).f 0 .
z 0ýo -2
m 0"
TR 5781
LiJ
LLi
UJU
-j C.)Lii
z i 0
z Irl>
UU
~LAJ
> C) 0 -3.00
Lfl > w>zCD N
0 0
F-I
m >
C- z
Mu -
G'J N! SSOI W01108
C-24
TR 5 78 1
4-j
I LA
-J0
00
- -
I ULJ
0 ,* z IU0 ý0
N
< CD
0
C-D
- . .,. .u.&-
TR 5781
crAn
Lai
LAJ
U 0
U0
z4fZrAQJ M_ _ __ _ _-JL( -
LD 0
Z a. CD
C3C
> C)
LfO
N, >
Z
U)
LJ.
0
In LJ -Ai nC
80 NI SS01 W~iiJOA
C-26
TR 5781
Lii
z
< IL
LLi
Z wWMj
z
zz-n 0 I
zz
mr 0"
0
-n I ,Lt
0 U') L
O3 IJ1u.~ '2 Cf
TR 5781
~LA
Lij
LLJ
Al- LU 0
CLL
z )
< ~0
Ln~
UlJ
000
Loizz
0 >
0 0 z
M 0
zzmN
-i 0
m0 NISO WiO
C-28
pow-rR 578
Uij0
LLl<
0
z< I
0
- uCI 0-w
(D r z
> 0
C C) z
o o LD
Ln
C-]-J
0l Lf 0lO 'CCZ
80 NJ :5O WUlj108
C-29
Tr 5781
nan
(D - C)
Iz~L'0
.00
anz z
o- 1 i S p
fl F>0 C flC
C-0
TR 5781
mLAJ
z0
zo
rc
00
0 LfZr z LoJ
I La
M- Z
m z
CD LaC).ILoCS7
N0 NISO Si
C-3
'FR 5781
ru~
. z.LJo
Z co 0
L* I
m L0J
z1 -
LO I - 0
X 0n
_j - ._ _ ..- .. .- . -2" L
> 0~z
Lnl> zz.N
00
C Ln
m a-
c zo£0
z f
80 NI SSQ1 W01108
C-32
TR 5781
cr
zoc
nJ;E
-Jo
0w
Omz
LL&J
N4CO
-D z
u-' m o 0 a
~'cn 0-K0 0
zz
U)C
ti) N) ILIOfloI t
C- 3
TR 5781
~LOJ
00z0
LJow.= M--
- LI CD
Ln
0 <
0
00
z 04
0N
C-34
TR 5781
00
I-
m 0
00
a- c. ..-
LAJ
-J w
U) m
U') z '0 < N
00
ou1-O
Ln~
nJ - - BC0 NI SSOI1 W011i08 -
LC-3
5
5 578 1
m IJ
JLL
Z a L ~
0 I 0 00
wrQmZ IJ Lo&
> c
Ln 0
00
0 > (D
00
o rz
wz
01
80 NI SSOI WOIIOG
C-36
TR 5781
ru1
0%
I Iin
-JoJ£nz
CD 0>S I
LN 0 > m
0 0
Z zn00 t C) --
-0 4L010 z
n
0n >') NOCru 4
80N SIWiN
C-7C3Revrs Bln
t INITIAL DISTRIBUTION LISTNO. OF
ADDRESSEE COPIES
CINCLANTFLT1CINCPACFLT1COMMANDER IN CHIEF, ATLANTIC (INEASTLANT)
CDR FOUKE (SACLANT) C-321COMSUBLANT1COMSIJBPAC1NUSC Science Advisor COMSUBLANT1COMSUBLANT (Dr. Mueller) 1FLEET ASW Tactical School (CDR Greuggeman) 1COMSUBDEVTWELVE (CDR Doors, J. Seaton) 2ASN(R&D) 1ONR, ONR-1 02-D, -102, -480, -481, ,-483, -485, -212
-222,-230,-486 10CNO, OP-095, -098, -03, -951, -951 D, -951 E, -953,
-955, -96, -095E, -983, -955G, -95E 13CNM, MAT-08T2, -08T1 2, -08T24, SP-20, ASW-1 11 5DDR&E (G. Cann)1DARPA1NRL 2NRL, USRD, NRL 2627 2NRL, AESD 1NORDA 1
Dr. R. Goodman, 110 1NRL 8170, 7201, 9370 3OCEANAV 1NAVOCEANO, Code 02 Z27, 6130 3NOO0, Code 03, 06, 61 q30, 3600 4NAVELEOSYSCOM, ELEX-03, -320, PhrE-1 24, 3NAVSEASYSCOM, SEA-03C, -06H-1, -06H-1-1, -06H1-1-2, -06H1-3
-06H 1-4(4), -061-2, -09G32(4), -660, -6606-22 16NAVAIRDEVOEN 1DTNSRDC 1NAVCOASTSYSLAB 1NAVSU RFWPNCEN 1NAVOCEANSYSCEN 1
Library, Code 6565 1NAVPGSCOL 2NAVWARCOL1APL/UW, Seattle 1ARLIPENN State, State College1ARL, Univ of Texas 1CENTER FOR NAVAL ANALYSES (ACQUISITION UNIT) 1DDC, ALEXANDRIA 12MARINE PHYSICAL L.AB, SCRIPPS (G. Shor) 2NOAA/ERL 1Lamont-Doherty Geological Observatory
(R. Houtz, C. Windish, W. Pitman) 3SACLANTCEN, La Spezia, Italy 2ONR, London 2
AREA, Canada 1
MAAL, ArgentinaMOO, UK (LDR Barnett) 1The Director, Royal Australian Navy Research Laboratory
Garden Island, New South Wales 2000, Australia 2RANRL (M. Hall, P. Nysen) 2Australian Defence R&D Attache, Washington, DC 2DREA (H. Merlinger, Major J. Ross, D. Scholfield) 3DREP (D. Thomson, R. Chapman) 2SACLANT ASW Research Centre (F. Jensen) 1NCSL (T. Watson) 1A. D. Little, Inc., (G. Raisbeck), Acorn Park,
Cambridge, MA 02140 1TRW Systems, Inc., (R. Brown), 7600 Colshire Drive,
McLean, VA 22101 1Planning Systems, Inc., (L P. Solomon), 7900 Westpark Drive,
McLean, VA 22101 1Undersea Research Corp., (J. Hess), 1920 Aline Avenue,
Vienna, VA 22180 1Underwater Systems, Inc., (M. Weinstein), 8121 Georgia Avenue,
Silver Spring, MD 20910 1Bell Telephone Laboratories, Whippany, NJ 07981B-K Dynamics, Inc. (A. E. Fadness), 2351 Shady Grove Road,
Rockville, MD 20850 1Tracor (J. T. Gottwald), 1601 Research Boulevard,
Rockville, MD 20850 1Texas Instruments, Inc. (A. Kirst), P.O. Box 6015, MS 400,
Dallas, TX 75222 1Raff Associates, Inc. (J. Bowen), 912 Thayer Avenue,
Silver Spring, MD 20910 1University of Miami (S. C. Daubin), School of Marine &
Atmospheric Sciences, 10 RickenbackerCauseway, Miami, FA 33149 1
Woods Hole Oceanographic Institution (E. E. Hays, J. Ewing),Woods Hole, MA 02543 2
Western Electric Company, 2400 Reynolds Road,Winston-Salem, NC 1
Tetra-Tech, Inc. (C. H. Dabney), 1911 Fort Meyer Drive,Arlington, VA 22209 1
Xonics, Inc., (S. Kulek), 6837 Hayvenhurst Avenue,Van Nuys, CA 91406 1
Seismic Engineering Co. (Mr. Leuhrmann), 3616 W. Alabama,Houston, TX 77027 1
Bolt, Beranek and Newman, Inc. (D. Sachs), 1701 N. FortMayer Drive, Arlington, VA 22209 1
Supreme Allied Commander, Atlantic, Antisubmarine WarfareResearch Center (0. F. Hastrup), La Spezia, Italy 1
Naval Research Laboratory, (R. H. Ferris, F. Ingenito),Washington, DC 3
Naval Ordnance Laboratory (R. J. Urick, I. Blatstein),Silver Springs, MD 2
Naval Undersea Center (H. P Bucker, H. E. Morris, D. Gordon,M. Pedersen, R McGirr, G. DiLoreto, J. Stewart,E. Chaika), San Diego, CA 8
Naval Air Development Center, (R. Balonis, C. Bartberger),Johnsville, PA 2
Naval Oceanographic Office (R. E. Christensen, W. Geddes,0. I. Oiachok, K. MacKenzie), NSTL, Bay St. Louis, MS 3
Office of Naval Research, Code 780, 486, Arlington, VA 1Defence Scientific Establishment (R. W. Bannister,
K M Guthrie) HMNZ Dockyard, Auckland 9, New Zealand 2Mr. Allen Boyles, Johns Hopkins University, Applied Physics
Laboratory, Johns Hopkins Rd., Laurel, MD 20810 1Mr John S Bird, Mr. R. Verrall, Defence Research Establishment
Pacific Forces Mail Office, Victoria, B.C. VOSIBO Canada 2Mr. J. I Mahler/CSA 1-2321, Automation Industries, Inc.,
14000 Georgia Ave., Silver Spring, MD 20910 1Mr. Eugene J. Feldhaus, EDO Corporation, Research Dept.
13-10 111 St, College Point, NY 11356 1Mr. Joie P. Jones, Case Western Reserve University
2058 Abington Rd., Cleveland, OH 44106 1Dr. R. Dicus, NRL, Code 8120 1Dr. W. P. Cunningham, Dr. D. F. Leipper, Naval Post
Graduate School, Monterey, CA 2Dr. D. Vasholz, NCSL, Code 791 1Dr. M, Wolpert, NSRDC, Code 1939 1Dr. D. Stickler, Dr. Sm McDaniel, Dr. A. Boyles, Johns Hopkins
University, Applied Research Laboratory, Penn State 3Dr. Jorge C Novarini, ARMADA ARGENTINA, Servico de Hidrografin
Naval Departamento Oceanografia, Montes de Oca2124, Buenos kires, Argentina 1
Dr. Ashoke K. Nath, Geoquest International Ltd,, 4605 Post Oak Place,Suite 130, Houston, TX 77027 1Dr. David E. Grass, Diagnostic/Retrieval Systems, Inc., 30 South St.,
30 South St, Mt. Vernon, NY 10550 1Dr. G. P. Gopalakushman, Director, Naval Physical and Oceanographic
Laboratory, Naval Base, Cochin-Y, India 1Dr. John Gill, Mr. Philip Lindop, Admiralty Research Laboratory
Portland, Dorset, United Kingdom 2Dr. John H. Stockhausen, Canadian Defense Research Establishment
Atlantic, P.O. Box 1012, Dartmouth, N.S. B2y 327 1Dr. C. Jeannin, Direction des Construction: Navales et Arrnes Laboratoire
Sous Marine, 83 Le Brusc, France 10. Grenness, N-3191 Horten, Norwegian Detense Research
"Establishment Norway 1Dr, A. Eller, NRL 1D. J. Dixey, UK Hydrographic Office 1Dr, Allan V, Oppenheim, Mass. Institute Tech, Cambridge, MA 1Dr, Sven Treitel, Dr. W. French, Amoco Production Corp., Tulsa, OK 2Dr. G. Fain, Dr. L. Estes, Southeastern Mass. University 2Dr. G. Bernard, ARL University of Texas 1Dr. A. 0. Williams, Brown University, Providence, RI 1
',
Dr. H. W. Marsh, General Delivery, Penrose, NC 28766 1Dr L. Brekhovsklkh, Academy of Sciences of USSR, Leninskii
Prospect 14 Moscow 117071 USSR 1Dr. F. Tappert, Courant Institute of Mati. Science, NYU,
New York City, NY 1Director, Weapons Research Establishment. Box 2151
G,P.O. Adelaide 5001, Australia 1D. G. Strahle, H. A. D'Assumpaco, D. V. Wyllie, WRE
Box 2151, G.P.O. Adelaide 5001, Australia 3Dr. Milo Backus, Dept. of Geological Sciences, University of
Texas at Austin, P.O. Box 7909, Austin, Texas 78712 1Mr. Anthony F. Gangi, Texas A&M Univ., Dept. of Geophysics
College Station, Texas 77843 1Mr. John Grow, US Geological Survey Dept. of the Interior
Office of Marine Geology, Woods Hole, MA 02543 1Mr. Frank Levin, Exxon Production Research Co., Houston,
Texas 77001 1
S* Yr