Gravimetry ,Relativity , and the Global Navigation ... › ... › Slides ›...
30
Gravimetry, Relativity, and the Global Navigation Satellite Systems — Second Lesson: Introduction to Differential Geometry — Albert Tarantola March 9, 2005
Transcript of Gravimetry ,Relativity , and the Global Navigation ... › ... › Slides ›...

Gravimetry, Relativity,and the Global Navigation Satellite Systems
— Second Lesson: Introduction to Differential Geometry —
Albert Tarantola
March 9, 2005
1

antisymmetric Ti jk = - Tjik = - Tik j .
1.2 Connection
Consider the simple situation where some (arbitrary) coordinates x ≡ {xi} havebeen defined over the manifold. At a given point x0 consider the coordinatelines passing through x0 . If x is a point on any of the coordinate lines, let usdenote as γ(x) the coordinate line segment going from x0 to x . The naturalbasis (of the local tangent space) associated to the given coordinates consists ofthe n vectors {e1(x0), . . . , en(x0)} that can formally be denoted as ei(x0) =∂γ∂xi (x0) , or, dropping the index 0 ,
ei(x) =∂γ∂xi (x) . (1)
So, there is a natural basis at every point of the manifold. As it is assumedthat there exists a parallel transport on the manifold, the basis {ei(x)} can betransported from a point xi to a point xi + δxi to give a new basis, that we candenote {ei( x + δx ‖ x )} (and that, in general, is different from the local basis{ei(x + δx)} at point x + δx ). The connection is defined as the set of coefficientsΓ k
i j (that are not, in general, the components of a tensor) appearing in the de-velopment
e j( x + δx ‖ x ) = e j(x) + Γ ki j(x) ek(x) δxi + . . . . (2)
For this first order expression, we don’t need to be specific about the path fol-lowed for the parallel transport. For higher order expressions, the path followed
3

antisymmetric Ti jk = - Tjik = - Tik j .
1.2 Connection
Consider the simple situation where some (arbitrary) coordinates x ≡ {xi} havebeen defined over the manifold. At a given point x0 consider the coordinatelines passing through x0 . If x is a point on any of the coordinate lines, let usdenote as γ(x) the coordinate line segment going from x0 to x . The naturalbasis (of the local tangent space) associated to the given coordinates consists ofthe n vectors {e1(x0), . . . , en(x0)} that can formally be denoted as ei(x0) =∂γ∂xi (x0) , or, dropping the index 0 ,
ei(x) =∂γ∂xi (x) . (1)
So, there is a natural basis at every point of the manifold. As it is assumedthat there exists a parallel transport on the manifold, the basis {ei(x)} can betransported from a point xi to a point xi + δxi to give a new basis, that we candenote {ei( x + δx ‖ x )} (and that, in general, is different from the local basis{ei(x + δx)} at point x + δx ). The connection is defined as the set of coefficientsΓ k
i j (that are not, in general, the components of a tensor) appearing in the de-velopment
e j( x + δx ‖ x ) = e j(x) + Γ ki j(x) ek(x) δxi + . . . . (2)
For this first order expression, we don’t need to be specific about the path fol-lowed for the parallel transport. For higher order expressions, the path followed
3

Varadarajan, V.S., 1984, Lie Groups, Lie Albegras, and Their Representations,Springer-Verlag.
Weinberg, S., 1972, Gravitation and Cosmology: Principles and Applications ofthe General Theory of Relativity, John Wiley & Sons.
A Operations on a Manifold
A.1 Connection
The notion of connection has been introduced in section 1.2 in the main text.With the connection available, one may then introduce the notion of covariantderivative of a vector field9, to obtain
∇iwj = ∂iwj + Γ jis ws . (52)
This is far from being an acceptable introduction to the covariant derivative, butthis equation unambiguously fixes the notations. It follows from this expression,using the definition of dual basis, 〈 , 〉 = δi
j , that the covariant derivative of aform is given by the expression
∇i f j = ∂i f j − Γ si j fs . (53)
9Using lousy notations, equation (2) can be written ∂i e j = Γ ki j ek . When considering a vector
field w(x) , then, formally, ∂iw = ∂i (wj e j) = (∂i wj) e j + wj (∂i e j) = (∂i wj) e j + wj Γ ki j ek , i.e.,
∂iw = (∇i wk) ek where ∇i wk = ∂i wk + Γ ki j wj .
30

Varadarajan, V.S., 1984, Lie Groups, Lie Albegras, and Their Representations,Springer-Verlag.
Weinberg, S., 1972, Gravitation and Cosmology: Principles and Applications ofthe General Theory of Relativity, John Wiley & Sons.
A Operations on a Manifold
A.1 Connection
The notion of connection has been introduced in section 1.2 in the main text.With the connection available, one may then introduce the notion of covariantderivative of a vector field9, to obtain
∇iwj = ∂iwj + Γ jis ws . (52)
This is far from being an acceptable introduction to the covariant derivative, butthis equation unambiguously fixes the notations. It follows from this expression,using the definition of dual basis, 〈 , 〉 = δi
j , that the covariant derivative of aform is given by the expression
∇i f j = ∂i f j − Γ si j fs . (53)
9Using lousy notations, equation (2) can be written ∂i e j = Γ ki j ek . When considering a vector
field w(x) , then, formally, ∂iw = ∂i (wj e j) = (∂i wj) e j + wj (∂i e j) = (∂i wj) e j + wj Γ ki j ek , i.e.,
∂iw = (∇i wk) ek where ∇i wk = ∂i wk + Γ ki j wj .
30

Property 1 A line xi = xi(λ) is autoparallel if at every point alongthe line,
d2xi
dλ2 + γijk
dx j
dλ
dxk
dλ= 0 , (3)
where γijk is the symmetric part of the connection,
γijk = 1
2 (Γ ijk + Γ i
k j) . (4)
If there exists a parameter λ with respect to which a curve isautoparallel, then any other parameter µ = α λ + β (where α
and β are two constants) satisfies also the condition (3). Anysuch parameter associated to an autoparallel curve is called anaffine parameter.
1.4 Vector Tangent to an Autoparallel Line
Let be xi = xi(λ) the equation of an autoparallel line with affineparameter λ . The affine tangent vector v (associated to the au-toparallel line and to the affine parameter λ ) is defined, at anypoint along the line, by
vi(λ) =dxi
dλ(λ) . (5)
It is an element of the linear space tangent to the manifold at theconsidered point. This tangent vector depends on the particular
5

affine parameter being used: when changing from the affine pa-rameter λ to another affine parameter µ = α λ +β , and definingvi = dxi/dµ , one easily arrives to the relation vi = α vi .
1.5 Parallel Transport of a Vector
Let us suppose that a vector w is transported, parallel to itself,along this autoparallel line, and denote wi(λ) the componentsof the vector in the local natural basis. As demonstrated in ap-pendix A.3, one has the
Property 2 The equation defining the parallel transport of a vector walong the autoparallel line of affine tangent vector v is
dwi
dλ+ Γ i
jk v j wk = 0 . (6)
Given an autoparallel line and a vector at any of its points, thisequation can be used to obtain the transported vector at any otherpoint along the autoparallel line.
1.6 Association Between Tangent Vectors and OrientedSegments
6

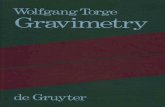
= 0
= 0
+ 1= 0
= 0 + 1
V i =dxi
d
k V i = W
i = ddxi
− 0 = 1−k
− 0( )
Figure 1: In a connection manifold (that may or may not be met-ric), the association between vectors (of the linear tangent space)and oriented autoparallel segments in the manifold is made usinga canonical affine parameter.
8

one can transport not only vectors, but also oriented autoparallelsegments.
vv
u
'
Figure 2: Transport of an oriented autoparallel segment along an-other one.
2 Sum of Oriented Autoparallel Segments
2.1 Definition and Basic Properties
In a sufficiently smooth manifold, take a particular point O asorigin, and consider the set of oriented autoparallel segments,having O as origin, and belonging to some finite neighborhoodof the origin3. We shall call these objects autovectors. Given twosuch autovectors u and v , define the geometric sum (or geosum)w = v⊕ u by the geometric construction exposed in figure 3, and
3On an arbitrary manifold, the geodesics leaving a point may form caustics(where the geodesics cross each other). The considered neighborhood of theorigin must be small enough as to avoid caustics.
10

given two such autovectors u and v , define the geometric differ-ence (or geodifference) w = v! u by the geometric constructionexposed in figure 4.
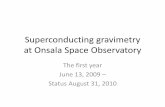
De!nition of w = v ⊕ u ( v = w ⊖ u )
v
u
v
u
wv
uv' v'
Figure 3: Definition of the geometric sum of two autovectorsat a point O of a manifold with a parallel transport: the sumw = v⊕ u is defined through the parallel transport of v alongu . Here, v′ denotes the oriented autoparallel segment obtainedby the parallel transport of the autoparallel segment defining valong u (as v′ does not begin at the origin, it is not an ‘autovec-tor’). We may say, using a common terminology that the orientedautoparallel segments v and v′ are ‘equipollent’. The ‘autovec-tor’ w = v⊕ u is, by definition, the arc of autoparallel (uniquein a sufficiently small neighborhood of the origin) connecting theorigin O to the tip of v′ .
As the definition of the geodifference ! is essentially, the ‘de-construction’ of the geosum ⊕ , it is clear that the equation w =v⊕ u can be solved for v :
w = v⊕ u ⇐⇒ v = w! u . (7)
11

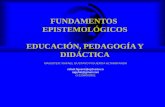
De!nition of v = w ⊖ u ( w = v ⊕ u )
v' v'
www
uuu
v
Figure 4: The geometric difference v = w! u of two autovectorsis defined by the condition v = w! u ⇔ w = v⊕ u . It can beobtained through the parallel transport to the origin (along u ) ofthe oriented autoparallel segment v′ that “ goes from the tip ofu to the tip of w ”. In fact, the transport performed to obtain thedifference v = w! u is the reverse of the transport performed toobtain the sum w = v⊕ u (figure 3), and this explains why in theexpression w = v⊕ u one can always solve for v , to obtain v =w! u . This contrasts with the problem of solving w = v⊕ ufor u , that requires a different geometrical construction, whoseresult cannot be directly expressed in terms of the two operations⊕ and ! (see the example in figure 6).
Figure 5: The opposite -v of an ‘autovector’ v is the ‘autovector’ oppositeto v , and with the same absolute variation of affine parameter as v (or thesame length if the manifold is metric).
v-v
12

It is obvious that there exists a neutral element 0 for the sum of au-tovectors: a segment reduced to a point. For we have, for any ‘autovec-tor’ v ,
0⊕ v = v⊕ 0 = v , (8)
The opposite of an ‘autovector’ a is the ‘autovector’ -a , that is alongthe same autoparallel line, but pointing towards the opposite direction(see figure 5). The associated tangent vectors are also mutually opposite(in the usual sense). Then, clearly,
(-v)⊕ v = v⊕ (-v) = 0 (9)
Given an ‘autovector’ v and a real number λ , the sense to be given toλ v (for any λ ∈ [-1, 1] ) is obvious, and requires no special discussion.It is then clear that for any ‘autovector’ v and any scalars λ and µ
inside some finite interval around zero,
(λ + µ) v = λ v⊕µ v , (10)
as this corresponds to translating an autoparallel line along itself.
The reader may easily construct the geometric representation that cor-responds to the two properties, valid in general,
(w⊕ v)# v = w ; (w# v)⊕ v = w . (11)
We have seen that the equation w = v⊕ u can be solved for v , togive v = w# u . A completely different situation appears when trying
14

to solve w = v⊕ u in terms of u . Finding the u such that by par-allel transport of v along it one obtains w correspond to an ‘inverseproblem’ that has no explicit geometric solution. It can be solved, forinstance using some iterative algorithm, essentially a trial and (correc-tion of) error method.
Note that given w = v⊕ u , in general, u "= (-v)⊕w (see figure 6),the equality holding only in the special situation where the autovectoroperation is, in fact, a group operation (i.e., it is associative). This isobviously not the case in an arbitrary manifold.
Not only the associative property does not hold on an arbitrary mani-fold, but even simpler properties are not verified. For instance, let usintroduce the following definition: An autovector space is oppositive isfor any two autovectors u and v , one has w# v = -(v#w) . Fig-ure 7 shows that the surface of the sphere, using the parallel transportdefined by the metric, is not oppositive. Also note that, in general,
w# v "= w⊕(-v) . (12)
2.2 Linear tangent Space
One intuitively expects that a sufficiently smooth manifold accepts alinear tangent space at each of its points. The autovectors we have in-troduced all have their origin at a given point. The linear tangent space
15

2.2 Linear Tangent Space
One intuitively expects that a sufficiently smooth manifold accepts alinear tangent space at each of its points. The autovectors we have in-troduced all have their origin at a given point. The linear tangent spaceat this origin point can be introduced via the relation
limλ→0
1λ(λ w⊕ λ v) = w + v , (13)
linking the geosum to the sum (and difference) in the tangent linearspace (through the consideration of the limit of vanishingly small au-tovectors).
2.3 Series Representations
We can now seek to write the following series expansion,
(w⊕ v)i = ai + bij wj + ci
j v j + dijk wj wk + ei
jk wj vk + f ijk v j vk
+ pijk! wj wk w! + qi
jk! wj wk v! + rijk! wj vk v!
+ sijk! vj vk v! + . . . ,
(14)
expressing the geometric sum (on the manifold) in terms of the sum inthe linear tangent space. We shall later see that this series relates to awell-known series arising in the study of Lie groups, called the BCHseries. Remember that the operation ⊕ is, in general, not associative.
17

Therefore, using equations (23)–(24) and (21)–(22), we arrive at the prop-erty [
(w⊕ v) " (v⊕w)]i = Ti
jk wj vk + . . .[( w⊕(v⊕ u) ) " ( (w⊕ v)⊕ u )
]i = 12 Ai
jk! wj vk u! + . . . .(29)
Loosely speaking, the tensors T and A give respectively a ‘measure’of the default of commutativity and of the default of associativity of theautovector operation ⊕ .
We shall see on a manifold with constant torsion, the anassociativitytensor is identical to the Riemann tensor of the manifold (this corre-spondence explaining the factor 1/2 in the definition of A ).
From equation (26) follows that the torsion is antisymmetric in its twolower indices:
Tijk = -Ti
k j . (30)
We can now come back to the two developments (equations (15) and (19))
(w⊕ v)i = wi + vi + eijk wj vk + qi
jk! wj wk v! + rijk! wj vk v! + . . .
(w" v)i = wi − vi − eijk wj vk − qi
jk! wj wk v! − uijk! wj vk v! + . . . ,
(31)
with the uijk! given by expression (20). Using the definition of torsion
and of anassociativity (27)–(28), it is possible to see that one can express
22

Therefore, using equations (23)–(24) and (21)–(22), we arrive at the prop-erty [
(w⊕ v) " (v⊕w)]i = Ti
jk wj vk + . . .[( w⊕(v⊕ u) ) " ( (w⊕ v)⊕ u )
]i = 12 Ai
jk! wj vk u! + . . . .(29)
Loosely speaking, the tensors T and A give respectively a ‘measure’of the default of commutativity and of the default of associativity of theautovector operation ⊕ .
We shall see on a manifold with constant torsion, the anassociativitytensor is identical to the Riemann tensor of the manifold (this corre-spondence explaining the factor 1/2 in the definition of A ).
From equation (26) follows that the torsion is antisymmetric in its twolower indices:
Tijk = -Ti
k j . (30)
We can now come back to the two developments (equations (15) and (19))
(w⊕ v)i = wi + vi + eijk wj vk + qi
jk! wj wk v! + rijk! wj vk v! + . . .
(w" v)i = wi − vi − eijk wj vk − qi
jk! wj wk v! − uijk! wj vk v! + . . . ,
(31)
with the uijk! given by expression (20). Using the definition of torsion
and of anassociativity (27)–(28), it is possible to see that one can express
22

The expressions for the torsion and the anassociativity can thenbe obtained using equations (33). After some easy rearrange-ments, this gives
Tijk = Γ i
jk − Γ ik j ; Ai
jk! = Rijk! +∇!Ti
jk , (36)
where
Rijk! = ∂!Γ
ik j − ∂kΓ
i! j + Γ i
!s Γ sk j − Γ i
ks Γ s! j (37)
is the Riemann tensor of the manifold and where ∇!Tijk is the
covariant derivative of the torsion:
∇!Tijk = ∂!Ti
jk + Γ i!s Ts
jk − Γ s! j Ti
sk − Γ s!k Ti
js . (38)
25

But in equations (32) we have obtained the expression of eijk ,
qijk! and r jk! in terms of the torsion tensor and the anassocia-
tivity tensor. Therefore, equations (32) give the covariant expres-sions of these three tensors.
2.6 Bianchi Identities
A direct computation shows that we have the following
Property 5 First Bianchi identity. At any point7 of a differentiablemanifold, the anassociativity and the torsion are linked through
∮( jk!) Ai
jk! =∮
( jk!) Tijs Ts
k! . (41)
This is an important identity. When expressing the anassociativ-ity in terms of the Riemann and the torsion (equation (40)), this isthe well-known ‘first Bianchi identity’ of a manifold.
The second Bianchi identity is obtained by taking the covariantderivative of the Riemann (as expressed in equation (37)) andmaking a circular sum:
7As any point of a differentiable manifold can be taken as origin of an au-tovector space.
27

Property 6 Second Bianchi identity. At any point of a differentiablemanifold, the Riemann and the torsion are linked through
∮( jk!)∇ jRi
mk! =∮
( jk!) Rim js Ts
k! . (42)
Contrary to what happens with the first identity, no simplifica-tion occurs when using the anassociativity instead of the Rie-mann.
2.7 Contracted Bianchi Identities
Introducing the Ricci tensor Ri j and the scalar curvature R through
Ri j = Rsjis ; R = gi j Ri j , (43)
and the contracted torsion
Ti = Tsis , (44)
it follows from the Bianchi identities (41)–(42) the following twoequations, named the contracted Bianchi identities:
∇sEis = Ts
!r ( 12 Rr!
si + δi! Rs
r) ; ∇i Cijk = (Rjk − Rk j) + Ts Ts
jk ,(45)
28

2.7 Contracted Bianchi Identities
Introducing the Ricci tensor Ri j and the scalar curvature R through
Ri j = Rsjis ; R = gi j Ri j , (43)
and the contracted torsionTi = Tsi
s , (44)
it follows from the Bianchi identities (41)–(42) the following two equations,named the contracted Bianchi identities:
∇sEis = Ts
!r ( 12 Rr!
si + δi! Rs
r) ; ∇i Cijk = (Rjk − Rk j) + Ts Ts
jk ,(45)
where the Einstein tensor Ei j and the Cartan tensor Cijk are defined as
Ei j = Ri j − 12 gi j R ; Ck
i j = Tki j + Ti δ j
k − Tj δik . (46)
Should the torsion be zero, then the contracted Bianchi identities degenerateinto
∇kEjk = 0 ; Ri j = Rji . (47)
The Ricci tensor is symmetric and the Einstein tensor satisfies a ‘conservationequation’.
28

2.7 Contracted Bianchi Identities
Introducing the Ricci tensor Ri j and the scalar curvature R through
Ri j = Rsjis ; R = gi j Ri j , (43)
and the contracted torsionTi = Tsi
s , (44)
it follows from the Bianchi identities (41)–(42) the following two equations,named the contracted Bianchi identities:
∇sEis = Ts
!r ( 12 Rr!
si + δi! Rs
r) ; ∇i Cijk = (Rjk − Rk j) + Ts Ts
jk ,(45)
where the Einstein tensor Ei j and the Cartan tensor Cijk are defined as
Ei j = Ri j − 12 gi j R ; Ck
i j = Tki j + Ti δ j
k − Tj δik . (46)
Should the torsion be zero, then the contracted Bianchi identities degenerateinto
∇kEjk = 0 ; Ri j = Rji . (47)
The Ricci tensor is symmetric and the Einstein tensor satisfies a ‘conservationequation’.
28

3 Gravitation
In General Relativity, the space-time is a four-dimensional manifold, endowedwith a metric that is locally Minkowskian. As it is customary to use Greek in-dices for the space-time coordinates, we should rewrite the contracted Bianchiidentities as follows
∇σ Eασ = Tσ
βρ ( 12 Rρβ
σα + δαβ Rσ
ρ)
∇σ Cσαβ = (Rαβ − Rβα) + Tσ Tσ
αβ ,(48)
the Einstein tensor and the Cartan tensor being expressed as
Eαβ = Rαβ − 12 gαβ R ; Cγ
αβ = Tγαβ + Tα δβ
γ − Tβ δαγ . (49)
29

The matter content of the universe is represented, at each space-time point,by the stress-energy tensor tαβ and the moment-stress-energy tensor mα
βγ
(for details, see Halbwachs, 1960). While talphaβ fundamentally describesthe mass density content of the space-time, mα
βγ describes the spin densitycontent.
The fundamental postulate of gravitation theory is that the Einstein tensor isproportional to the stress-energy tensor, and that the Cartan tensor is propor-tional to the moment-stress-energy tensor:
Eαβ =8 π G
c4 tαβ ; Cγαβ =
8 π Gc4 mγ
αβ . (50)
This theory, including torsion and spin is called the Einstein-Cartan theoryof gravitation, and the two equations above are called the Einstein-Cartanequations. See Hehl (1973, 1974) for details.
If the moment-stress-energy tensor is zero, then, the torsion tensor and theCartan tensor vanish, the stress-energy tensor is symmetric, and we are leftwith the original Einstein theory of gravitation. Its fundamental equationsare
∇σ Eασ = 0 ; Eαβ =
8 π Gc4 tαβ ; tαβ = tβα .
(51)
4 References
30

The matter content of the universe is represented, at each space-time point,by the stress-energy tensor tαβ and the moment-stress-energy tensor mα
βγ
(for details, see Halbwachs, 1960). While talphaβ fundamentally describesthe mass density content of the space-time, mα
βγ describes the spin densitycontent.
The fundamental postulate of gravitation theory is that the Einstein tensor isproportional to the stress-energy tensor, and that the Cartan tensor is propor-tional to the moment-stress-energy tensor:
Eαβ =8 π G
c4 tαβ ; Cγαβ =
8 π Gc4 mγ
αβ . (50)
This theory, including torsion and spin is called the Einstein-Cartan theoryof gravitation, and the two equations above are called the Einstein-Cartanequations. See Hehl (1973, 1974) for details.
If the moment-stress-energy tensor is zero, then, the torsion tensor and theCartan tensor vanish, the stress-energy tensor is symmetric, and we are leftwith the original Einstein theory of gravitation. Its fundamental equationsare
∇σ Eασ = 0 ; Eαβ =
8 π Gc4 tαβ ; tαβ = tβα .
(51)
4 References
30

C Total Riemann Versus Metric Curvature
C.1 Connection, Metric Connection and Torsion
The metric postulate (that the parallel transport conserves lengths) is
∇kgi j = 0 . (100)
This gives∂kgi j − Γ s
ki gs j − Γ sk j gis = 0 , (101)
i.e.,∂kgi j = Γ jki + Γik j . (102)
The Levi-Civita connection, or metric connection is defined as
{ki j} =
12
gks (∂ig js + ∂ jgis − ∂sgi j
)(103)
(the {ki j} are also called the ‘Christoffel symbols’). Using equation (102), one
easily obtains {ki j} = Γki j + 12 ( Tk ji + Tjik + Ti jk ) , i.e.,
Γki j = {ki j} +12
Vki j +12
Tki j , (104)
whereVki j = Tik j + Tjki . (105)
47

C Total Riemann Versus Metric Curvature
C.1 Connection, Metric Connection and Torsion
The metric postulate (that the parallel transport conserves lengths) is
∇kgi j = 0 . (100)
This gives∂kgi j − Γ s
ki gs j − Γ sk j gis = 0 , (101)
i.e.,∂kgi j = Γ jki + Γik j . (102)
The Levi-Civita connection, or metric connection is defined as
{ki j} =
12
gks (∂ig js + ∂ jgis − ∂sgi j
)(103)
(the {ki j} are also called the ‘Christoffel symbols’). Using equation (102), one
easily obtains {ki j} = Γki j + 12 ( Tk ji + Tjik + Ti jk ) , i.e.,
Γki j = {ki j} +12
Vki j +12
Tki j , (104)
whereVki j = Tik j + Tjki . (105)
47

C Total Riemann Versus Metric Curvature
C.1 Connection, Metric Connection and Torsion
The metric postulate (that the parallel transport conserves lengths) is
∇kgi j = 0 . (100)
This gives∂kgi j − Γ s
ki gs j − Γ sk j gis = 0 , (101)
i.e.,∂kgi j = Γ jki + Γik j . (102)
The Levi-Civita connection, or metric connection is defined as
{ki j} =
12
gks (∂ig js + ∂ jgis − ∂sgi j
)(103)
(the {ki j} are also called the ‘Christoffel symbols’). Using equation (102), one
easily obtains {ki j} = Γki j + 12 ( Tk ji + Tjik + Ti jk ) , i.e.,
Γki j = {ki j} +12
Vki j +12
Tki j , (104)
whereVki j = Tik j + Tjki . (105)
47

The tensor - 12 (Tki j + Vki j) is named ‘contortion’ by Hehl (1973). Note that
while Tki j is antisymmetric in its two last indices, Vki j is symmetric in them.Therefore, defining the symmetric part of the connection as
γki j ≡ 1
2(Γ k
i j + Γ kji) , (106)
gives
γki j = {k
i j} +12
Vki j , (107)
and the decomposition of Γ ki j in symmetric and antisymmetric part is
Γ ki j = γk
i j +12
Tki j . (108)
C.2 The Metric Curvature
The (total) Riemann R!i jk is defined in terms of the (total) connection Γ k
i j
by equation (89). The metric curvature, or curvature, here denoted C!i jk has
the same definition, but using the metric connection {ki j} instead of the total
connection:
C!i jk = ∂k{!
ji}− ∂ j{!ki} + {!
ks} {sji}− {!
js} {ski} (109)
48

when geodesics and autoparallels coincide, the torsion T is a totally antisymmetrictensor:
Ti jk = -Tjik = -Tik j . (114)
51

When the torsion is totally antisymmetric, it follows from the definition (105)that one has
Vi jk = 0 . (115)
Then,
Γ ki j = {k
i j} +12
Tki j , (116)
and
{ki j} =
12
(Γ k
i j + Γ kji)
= γki j , (117)
i.e., when autoparallels and geodesics coincide, the metric connection is thesymmetric part of the total connection.
Note: explain here that, if the torsion is totally antisymmetric, one introducesthe tensor J as
J!i jk = T!
is Tsjk + T!
js Tski + T!
ks Tsi j , (118)
i.e.,J!
i jk =∮
(i jk) T!is Ts
jk . (119)
It is easy to see that J is totally antisymmetric in its three lower indices,
J!i jk = -J!
jik = -J!ik j . (120)
52