GRADIENT CHANGE i/i ARMY ARMAMENT RESEARCH … · 2014. 9. 27. · ad-a166 416 _ _ _ tecmn#cal...
33
ARD-A166 416 ANALYSIS OF GRADIENT CHANGE THRESHOLDS IN THE DETECTION i/i OF EDGES OF OBJEC. (U) ARMY ARMAMENT RESEARCH AND DEVELOPMENT CENTER WATERVIIET NY C.. C N SHEN ET AL. UNLSSIFIED FEB 86 ARCCB-TR-8607 SI-D-E4 8 317 F/G t7/5 U EEMES EEE
Transcript of GRADIENT CHANGE i/i ARMY ARMAMENT RESEARCH … · 2014. 9. 27. · ad-a166 416 _ _ _ tecmn#cal...

ARD-A166 416 ANALYSIS OF GRADIENT CHANGE THRESHOLDS IN THE DETECTION i/iOF EDGES OF OBJEC. (U) ARMY ARMAMENT RESEARCH ANDDEVELOPMENT CENTER WATERVIIET NY C.. C N SHEN ET AL.
UNLSSIFIED FEB 86 ARCCB-TR-8607 SI-D-E4 8 317 F/G t7/5 U
EEMES EEE

1 .
16,6
III"-
III -
MCROCOPY RESOLUTION..TA IC W L BU REAU Of STAN'
IR 1963

AD-A166 416 _ _ _TECMN#CAL REORT ARCCTR-66007
ANALYSIS OF GRADIENT CHANGE THRESHOLDS IN THE
DETECTION OF EDGES OF OBJCTS FROM RANGE DATA
C. N. SHEN
R. L. RACICOT MAQDacTE
FEBRUARY 1986
US ARMY ARMAMENT RESEARCH AND DEVELOPMENT CENTERCLOSE COMBAT ARMAMENTS CENTER
I-sI ,0 e~9FN9T WEAPONS LABORATORY "-i"
APPROVED FOR PUBLIC RELEASE; DISTRIBUTION UNLIMITED
LAU
ra -
9t ~~~86 3 '( 092,.::2-.1

SECURITY CLASSIFICATION OF THIS PAGE (fIei Data Entero
REPORT DOCUMENTATION PAGE BRED IMSTUCTI OBEFORE COMPLETING FORM
I. REPORT NUMBER 2. GOVT ACCESSION NO. 3. RECIPIENT'S CATALOG NUMBER
ARCCB-TR-86007 /1- 166 __ _ __ ___ __
4. TITLE (end Subtitle) S. TYPE OF REPORT A PERIOD COVERED
ANALYSIS OF GRADIENT CHANGE THRESHOLDS IN THEDETECTION OF EDGES OF OBJECTS FROM RANGE DATA Final
6. PERFORMING ORO. REPORT NUMBER
7. AUTHOR(e) U. CONTRACT OR GRANT NUMBER(*)
C. N. Shen and R. L. Racicot
9. PERFORMING ORGANIZATION NAME AND ADDRESS 10. PROGRAM ELEMENT. PROJECT. TASKAREA & WORK UNIT NUMBERS
US Army Armament Research & Development Center AM04S No. 6111.01.91A0.OllBenet Weapons Laboratory, SMCAR-CCB-TL PRON No. lA52F59WlAlAWatervliet, NY 12189-4050
It. CONTROLLING OFFICE NAME AND ADDRESS 12. REPORT DATE
US Army Armament Research & Development Center February 1986Close Combat Armaments Center IS. NUMBER OF PAGES
Dover. NJ 07801-5001 2214. MONITORING AGENCY NAME a AOORESS(If different hm Controlling Office) 1S. SECURITY CLASS. (of thie repoat)
UNCLASSIFIED1Se. OECL ASSI FIC ATION/DOWNGRADING
SCHEDULE
IS. DISTRIBUTION STATEMENT (of ffi Ropont)
Approved for public release; distribution unlimited.
17. DISTRIBUTION STATEMENT (of the aberact entered in Block 20, II ditffrent trom Report)
18. SUPPLEMENTARY NOTES
Presented at the Third Army Conference on Applied Mathematics and Computing,
Georgia Institute of Technology, Atlanta, Georgia, 13-16 May 1985.Published in Proceedings of the Conference.
I. KEY WORDS (Continue on reveree side It necessary mid Identify by block umber)
Gradient Change Scanning SchemeDetect ion Laplacian Method
Threshold Second Residual MethodProbabilities
20. ASTRACT fCWIu m rev oh N newoffemand #~dtfir by block tnusiler)
Edges of objects setting on or within a flat terrain can be defined by the
slope or gradient change occurring at the edge. A simple estimate of slopechange is to calculate the Laplacian using incremental range measurements taken
at different elevation angles. The Laplacian is defined as the second
difference of the range data. Since the range data contains noise in the formof measurement error, consideration must be given to the statistical aspects of
(CONT'D ON REVERSE)
D J AM 1473 o.ToWo FOVSSSLET, UNCLASSIFIED
SECURITY CLASSIFICATION OF THIS PAGE (Wm Date fter ed)
* W,- ;.,. , . ,, . , .\ ;, '.'.-,'

S9UC4TY CLASSIFICATION OF THIS PAQUr iiM. Mise
20. ABSTRACT (CONT'D)
detecting edges in order to differentiate between actual edges and noise
effects. In this report, results are presented which describe the effects onminimum detectable slope change of (1) noise levels, (2) probability of miss,
(3) probability of false alarm, (4) spacing of the measurements, and (5)random distribution of edges near range measurement points.
CO
- $1SECURITY CLASSIIlCATION oPr THIS PAGE(FlWhl Dii. Enfe.

TABLE OF CONTENTSPage
INTRODUCTION I
THE LAPLACIAN METHOD 1
THE RAPID ESTIMATION SCHEME AND COMPARISON OF ERROR PROBABILITIES 4
MINIMUM SLOPES OF DETECTABLE OBSTACLES 5
FUNCTION K OF ANGULAR GEOMETRY 7
THE SCANNING SCHEME 9
PROBABILITY OF DETECTION FOR RANDOMLY LOCATED EDGES 10
CONCLUSION 12
APPENDIX 20
TABLES
I. FALSE ALARM PROBABILITIES AND MISS PROBABILITIES FOR 3VARIOUS T/iR AND u*//i
II. ERROR PROBABILITIES 4
III. VALUES OF K AS FUNCTIONS OF GAMMA AND BETA + PHI 8
IV. TOTAL PROBABILITY OF DETECTION FOR RANDOMLY LOCATED EDGES 13
LIST OF ILLUSTRATIONS
1. Distributions and Probabilities Comparing the Two Methods. 15
2. Obstacle Geometry. 15
3. Angular Geometry. 16
4. Projection Geometry. 17
5. Scanning Factors. 18
6. Reference Directions of Laser Rays Near an Edge Point. 19 El
By
SAvailability Codes
D t Avail a --d rDist Special
-Y Th*1<'pe

I
I.'p.
V
p
~i.
..w- . -. J4~

INTRODUCTION
A laser range finder is installed on the top of a mast attached to a land
vehicle or a helicopter. This laser range finder measures the distance
between Itself and the ground points on a terrain with obstacles. For
segmentation, the edges of the boulder and crater must be estimated. In
determining the near edges of a boulder or the far edges of a crater, it is
necessary to locate the first differences of the slopes of the terrain. This
is equivalent to finding the second differences of the terrain range points.
The threshold values of the second differences can be in terms of an angle in
a vertical plane. The probabilities of miss and false alarm can be
ascertained depending on the method of estimation and the scanning scheme.
THE LAPLACIAN ETHOD
The Laplacian Method considers cross-sections of terrain and looks for
changes in slope in the azimuth or radial direction. Since we are only
considering one-dimensional problems, we can write for the measurement
equation
Zi = di + vi (I)
The change in slope is estimated by computing the following sufficient
statistic:A
si - zj+ 1 -2 zi + z_ 1 (2)
This is a digital approximation of the second derivative, or second
difference, of the range.
Due to the presence of measurement noise in the calculation of si, it is
impossible to discern with absolute certainty whether a change of slope
I

exists. The Neyman-Pearson criterion provides a decision rule which we my
use to accurately detect edges of obstacles with a known probability of making
an error. To produce the decision rule, first we must compute the variance of
s i as follows. We assume that the noise components vi of the measurements are
independent Gaussian random variables with zero mean and a variance of 02.
Then, since zi+l, zi, and zi_1 are independent, Eqs. (I) and (2) yield
var(si) - var(zi+l-2zi+zi+l)
m var(zi+l) + var(-2zL) + var(zl+l)
- 02 + 402 + 02 - 602 (3)
Because si is a scalar random variable, the Neyman-Pearson criterion
provides a decision rule identical to that derived using hypothesis testing.
The desired decision rule is
no signal if -T - si C TDECISIONi - (4)
presence of signal if si is otherwise
where T is the threshold in the decision process which can be determined from
the equations
PF - 2#[-T/;6-'07 (5)
PH "[(T-u*)/-60ZJ (6)
where. j z
*(z) e-/2a' • -e 2/2 da (7)
It is noted that the magnitude of sL Is not estimated by the Laplacian Method.
The quantity u* is called the "minimum detectable change of slope," since it
is the smallest change of slope that can be detected with a miss probability
of PH or lower. The quantity PF indicates the probability of a false alarm.
2

The miss probability PM is the probability of not detecting a true change of
slope equal to u*.
Typically, the standard deviation V5 is a known system parameter and u*
is chosen so that suitable values of PF and P14 can be obtained. Table I shows
the trade-off of PF vs. PM4 for different values of the ratio u*/0. These
values are computed using Eqs. (5) and (6).
TABLE I. FALSE ALARM PROBABILITIES AND MISS PROBABILITIES
FOR VARIOUS T/FR AND u*/i
1 I I I rPH For PH For I PMFor I P For P 1 ForIIIIII I I I
T/i P7, u*l /R'2 u* //R-3 I u*l/ I u*/'R;5I u* /R"-6 Ir i r
1.000 .3174 .1587 .0227 .0013 .0000 .0000
1.500 .1336 .3085 .0668 .0062 .0002 .0000
I 1.679 .0932 .3741 .0932 .0102 .0005 .0000
2.000 .0456 .5000 .1587 .0227 .0013 .0000
2.146 .0319 .5580 .1966 .0319 .0022 .0001
2.500 .0124 .6915 .3085 .0668 .0062 .0002
3.000 .0026 .8413 .5000 .1587 .0227 .0013
3.500 .0003 .9332 .6915 .3085 .0668 .0062
4.000 .0000 .9772 .8413 .5000 .1587 .0227
3
.1

THE RAPID ESTIMATION SCHEME AND COMPARISON OF ERROR PROBABILITIES
The variance of si for the Laplacian Method is usually too high when a
change of slope occurs during scanning. An adaptive method called Rapid
Estimation Scheme is used instead to keep the variance lower, thus also
reducing the probabilities of false alarm and miss. A discussion of the
Second Residual Method for the Rapid Estimation Scheme is given In the
Appendix.
The different expressions for the error probabilities of the two methods
are given in Eqs. (5) and (6) and reiterated in Table II. We see that the
expressions for both methods are the same except that 7602 appears with the
Laplacian Method, whereas 7'5i+2 appears with the Second Residual Method.
TABLE I. ERROR PROBABILITIES
I 1 1I Method I Probability of False Alarm I Probability of MissI _ _ _ _ _ I _ _ _ _ _ _ _ _ I_ _ _ _ _ _
! I I ___
I Laplacian pL - 2#[-T//6' ) I pL -*[(T u*)/6ZI II I IM II Second Residual I P5 - 2[-T/Si-+2 I PS - #[(T-u*)/,rSi+21 I -- I F -I
We know that the Second Residual variance is less than or equal to the
Laplacian variance:
7 (i+ -C A- (8)
Since #(z) is a monotonically increasing function and has a negative
argument in all the expressions in Table II (we assume T-u* < 0), we can
conclude that
pS (Second Residual) 4 pL (Laplacian) (9)F F
4

PS (Second Residual) 4 pL (Laplacian) (10)H H
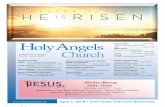
Figure 1 illustrates how the smaller Second Residual variance leads to smaller
error probabilities.
With smaller error probabilities, we expect the Second Residual Method
will have a better performance over the Laplacian Method.
MINIMUM SLOPES OF DETECTABLE OBSTACLES
In this section we will determine the threshold in edging of gradient
changes of obstacles. These may be detected using the Second Residual or the
Laplacian Method.
Obstacles may or may not be detectable depending on the change of slopes
of the terrain at its edges. It will be shown here that the minimum
9 detectable slope change depends upon a given group of parameters.
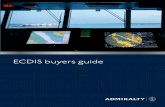
Figure 2 shows a diagram of an obstacle. C and B are consecutive points
where laser beams emanating from laser range finder bounce off the terrain.
The slope of the obstacle is tan 6, since the slope between C and B is zero.
The mast height is b, the height at which the laser range finder is located.
Point D is the estimate of the range based on the data at point B and previous
points. Thus, the range of point C is measured as zi+2 and point D lies at a
range of di+2 , where di+2 - HFi+lX*i+l is the prediction of the range d1+2
from previous data. We see that the distance from C to D is the residue,
ri+2. It is apparent that the expected value of ri+2 takes its minimum value,
u*. From the geometry, the quantity tan e can be computed by finding x/y.
These quantities are found as follows:
5

x - U* sin B (11)
y- Ap - u* Cos B (12)
then
tan 8 - x/y = (u* sin B)/(Ap - u* cos B) (13)
By extending the above idea, we have two slopes, AB and BC, instead of
one in the previous cases as shown in Figure 3. The angle Y is the difference
of the angle 0 for slope BA and the angle + for slope CB. Now the slope of Y
becomes
atan Y - , (y (14)
b
wherea - u* sin (0+4) (15)
and
b - (Ap) cos - (Ap) sin # cot (U) -u* cos (+ )
sin (B+) cos - cos (0+#) sin *( ) -u* cos (B+*)sin(+)
(AP) sinT u* cos (0 *)
sin (0+#)
1 u* 1- (AP) sin B sin (0++) [----- ----- - ----- (16)
sin2 (0+#) (AP) sin B tan (0+-)
Combining the terms, we have
(u*/T) tan2 ((7)1 + tan2 (0+4) - (u*/T) tan (0+f)
where
- (Ap) sin 0 (18)
The quantity T is the projection of the data spacing in the direction of sin
6
..........

If Eq. (17) is solved for u*/T, we have
A tan y [I + tan2 (0-),-u*l't K('y,84,) --------------- (19)tan (0*4) [tan (C*#) + tan i()
Table III gives the values of K as a function of angle of detection y and
the sum of the elevation angle B and the terrain angle *, (0).
The above equation can also be derived from Figure 4 which gives
Au*/T - K(y,O) . [cot (03*) - cot (0+4jy)] (20)
FUNCTION K OF ANGULAR GEOMETRY
If we can keep the ratio u*/T constant in Eq. (19) or (20), then the
value of K(Y,O+) will be constant in Table III. This can be achieved by
letting both u*//R and T/i be constant. First, we will discuss the value of
u*/rR.
Table I shows the values Of PF for given threshold to noise ratio T/lR
which guarantees the probability of detection. It also lists the values of PM
for both T/FR and the signal to noise ratio, u*//I. For example, let us take
T/' 1.679 and u*/CR 3. We have
PF - 0.0932 (21a)
Pm - 0.0932 (21b)
which are reasonable values for our problem.
The second part is to keep the ratio T/i constant. This is related
to the scanning scheme given in the next section. From Eq. (18), we have
T/I = (Ap)(sin )//IR - constant - L (22)
Then the ratios3- ( y, ) (23)
!. t/i L
7
7I

-- - - ---K --- - - - - - - - - - -%D D 4 t % 4 4 i %D% 0 " r40 0 "%D 4 rV - W
M M ... ... In In %0 D D P. 0 w w 0 C47 C 0 0 C C C
~ I 00 O O O O 0 O 0----------4 - ------4 w DI -MV4 % 0 % N 0 w1 %-%oC O ; - -% "O- "M r
M e. n n% 0%0l-r.ODG Da a%0 00rC a V4 1-0 I4 fl. . . . . . . . . . . . .
IC) 0 C o o 0 0 o C) 0 C 0 0 0 C 0 C C 0 C C C C 4 P-. C4 P4 P4 C CC
- - - - - - - - - - -0- - - --Iq-4--4----- - - - -~
- ~ ~ ~ ~ ~ ~ ~ 0 01 VC C C C -C C4 C CCCCCCC C- C4 C4 M M
o 00 00 00 00 00 0 4I- o4u- 4
.- 4,0- - - - - - - - - - - -
ffl M0 4% %*% l % 0WrMw. 41-r -% D%H4Mr AWt Tf .MWr M- P 40r %% M0I
Ln0 )% L (% ' O fb - l r4%D0 *W % % %0 - f r - W
en C C4 &M %0 CC P- C W W a% M C C C C 4 C A C C C C C
- -- - - - - - - - - - - - - - - - - - - - - - - - - - -
99 Cd C C C C C * C C; C; C C; 4 C: C: C: C : 1: C : C: C: C: C: C C: C4104~c
-- - - - - - - - - - - - - - - - - - - - - - - - -C ~ ~ & CD -V LM C C " P4 U% C C C C C C C C
P4H DF *"L 4 gnM0L DM0% 4PH nW* 0r 400 -- 4r Y %*0 -"% r nWNL
H4 0 -M0 %0P4"" M-00I n DF.P %0
8 008 8 8 8 4 M:CO
-- - - - - - - - - - - - - - - - - - - - - - - - - -
O (; C C C 8 4 C4 C I. C C .; C I. C 1. C 0C 0 C C C C A C C4 C A 0 A C4
1- - - - - - - - - - - - - --- - -~ - - - - - -,

If L is chosen as 4, then one will look at the points for K - 0.75 in Table
ItI. If L is chosen as 1.6, then one will look at the points for K - 1.875 in
Table Ill. For K - 0.75, the follwing set of angles appears:
804 15@ 200 25' 300
y 3.80 6.70 10.2' 15.8 °
In summary, the above value of Y is guaranteed to be detected for the
conditions
u*/R - 3 , PF - PM 0.0 9 3 2 ,
and the variable 0+# as listed.
THE SCANNING SCHEME
In order for the value of L to be constant in Eq. (22), one will take the
discrete form in Figure 5 as
(AP)1 sin 01 = (AP)2 sin 02 T = I L - constant (23)
If b is the height of the mast, then
b bsin B1 = ..... sin 02 . ... . (24)
Thus, we have in Figure 4
(Ap)h (0p)2 T
- ft - - -- (25)
The above equation indicates that the spacing of the horizontal
projection is proportional to the radial distances from the laser to points on
the horizontal plane. For example, let us take b - 2, then
(AP)l (0p)2 vi" +. --- (26)
4+P1Z A+ p29 2 2
9

or
(Ap)i - (/4+pj')&/2 (26)
For example, given FR - 0.125 and L - 1.6 or rR - 0.05 and L - 4.0, in both
cases we have T - r-L - 0.20. Then, from Eq. (26), we have
p 2 m 5 m 10 a 20 .
AO 0.2828 m 0.5353 m 1.1832 m 2.010 a
In this case we may miss a boulder of 0.2 m at 2 a away or a boulder of 2 m at
20 m away.
PROBABILITY OF DETECTION FOR RANDOMLY LOCATED EDGES
In the previous sections it was assumed that range measurements were
available from the range finder to the exact vertex of an edge. This is
represented by point B in Figures 2 and 3. An edge is defined here by a
discrete angular change Y. If the range measurement falls exactly on an edge,
then only a deterministic value for the residue u* in Eq. (19) is obtained.
This, in turn, corresponds to a deterministic value for the PD, probability of
detection, in which PD - 1-PH with PN being given by Eq. (6).
In practice, however, the edges of objects might be randomly distributed
and the range measurements, in general, might not fall exactly on an edge. A
more realisitc approach, therefore, might be to treat the range measurements
to be randomly distributed near an edge represented, for example, by points
A, B, and C in Figure 6. A random residual u* would result for given edge
angular change y instead of the constant deterministic value of u* assumed
previously.
10

The probability of detection in this case can be calculated using Eq. (6)
as a function of the random variable u*:
T-u*P(Detectionlu*) - 1 - P (Misslui*) - 1 - *[--] (27)
From geometric considerations, it can be shown that u* will range
approximately from u*/2 to u* in Figure 6. It can be further assumed that the
distribution of u* will be uniform over this range of values which corresponds
to a purely random distribution of object edges on a given terrain. Equation
(27) can then be used to determine the total probability of detection:
P(Detection) P(Detlu*)f(u*)du*u*/2
2 u*
" f/ P(Detlu*)du*
p.,*1u* u*/2
2 u* T-U* -- - 'u12 (11-[---])du* (28)
in which f(u*) equals uniform distribution on (u*/2 to u*), and u* is given by
Eq. (19).
Equation (28) can be solved as a function of T, ii, and u* where u* is a
function of y, (B+#), and T as in Eq. (19). As an example, let
T/i - threshold level for detection
M 2.146; gives PF n 0.0319 from Table I
/1 - /62 where a - range data noise level
M 0.1225 for a - 0.05
T - 0.20
11

The resulting P(Detection) is shown in Table IV as a function of the angle
change Y and (0+4). Other similar information can readily be generated for
other parameter values depending on the actual problem to be solved.
The behavior of the minimum detectable angular change y can be readily
determined from the type of information given in Table IV. For example, by
requiring P(Detection) - 0.90 and letting 0# - 15 degrees, results in a
minimum detectable value of y to be about 40 degrees. This compares to a
value of y at 13 degrees for the nonrandom case previously considered where
the range is assumed to be measured directly to the edge vertex.
CONCLUSION
For an assigned probability of false alarm and miss, one can determine
the signal to noise ratio and the threshold to noise ratio. If we use a
special scanning scheme such that the spacing of horizontal projections is
proportional to the radial distances from the laser to a horizontal plane,
then the function K of angular geometry is also constant. The detectable
angle Y with certain probability can be found if K and Of- are known. The
angles 0+# are related to the elevation angle 0 and the terrain slope *.
The following results were discussed in this report:
1. Ability to detect the change of slopes in a terrain for navigation of
vehicles or robotic platforms.
2. Determination of the probability of false alarm and the probability
of detection for various signal to noise ratios and for the case of randomly
distributed measurements.
12
r 1 1 r 1 1

-- - - - -- - - ----- - --
0~~~~ a %00t 'Vr0~ - -o ri V-4 %r4V 'i1.
0 00 000000000000000M
I t C V % Dr t % O W o r . " C m m mU y 0
o4 D L 0000%00-M0%t'"9F-00% 0% uP Ma
W0 U1-00 0'flinW MUN la (O -44 F -' N UN P4 " 4
&A r. W . Lf M 0 In * A W 4 -W %D W 0 " M * In
--------------
r4 MCO %M 0W 7 -0%OWIADPM00 C 00 f0% i C00% '- * LM - W0% 0 P4"
-4 00000gnk D -P I-W 000000) 000 0 0
0M -4ink0v
0 * * 0 . 0 * 0 0 . . 0 0 0 0 0 . * *
In 0 00 0 0 0 00 0 0 0
0 0
j %'0in00 ci %0 0 % 0% OICa,0s m0% 0%0%Goi 00-4 m0 t% P.000%%0% 0% 0%a ak0%a0%0% 0%
00000, NO000000 000a0000000*0 -*4 r.- r4 *4- r. "4*- *~- . * * * * *
A. ~ co '04000000000000 008* c4 '~00 00 8 8 8 8 8 8 000
f-i~~ 0 * . . 0 * 0 0 0 0 a * 0 0 * *
04 0 0 0r4 V 4 "" N" Mm mM M-4
0 t% a "*e% 0 0 0 0 0 0 0 0% 0 0 8 8 8D8w o--- 0000000-----00000
0'00 0000 000 0000013

3. Determination of required signal to scanning factor ratios for
various slopes and slope changes. The signals relate to the probability of
detection and the scanning factor influences the size of the obstacles.
4. Computation of the probability for detection of an edge if the
reference directions of the laser rays are uniformly distributed over the
slopes near an edge point.
14

Varianccecvf.71
-T 0 T U*x
Figure 1. Distributions and Probabilities Comparing
the Two Methods.
i-Laser Range-FInder A
Projectionu~o-Ap I-% 7 Proiection=p
D%
Figure 2. Obstacle Geometry
15

I
I A.'I
I >.'II
/ - - - - - - - 'I,'I, II- - I/ 4~ j ~hq,~'\ /
I \/9/ I p
A 1j4'* a9-4
a ~ *~q~I
I1 I~*) I
II -. -/ I
~ 3dI A) go.94/ II 4r~~
/'-N
I I'- -/ - - I - - -
I
/I
I16

V)
Figure 4. Projection Geometry
17

WI 41>J
- - -
'I/
/I
/
- ~~0, *1-(3II
A-;C4*U
*1 F. U
p*14
IN U
U'TI'4-- - -'V
~ \ /a - - 4
A
4-
z S0 N
s-JO-4 ________
18

41
01.
004
IS
190

APPENDIX
THE SECOND RESIDUAL METHOD
The Second Residual Method, similar to the case with the Laplacian
Method, considers cross-sections of terrain and looks for changes in slope.
Here, however, a state estimation and decision process is used to perform the
detection. A discrete second order linear time-varying system model is used
to estimate ranges and gradients (slopes) from current and previous data. If
the difference between a range measurement and range prediction is large
enough, a change in slope is indicated and a special estimation scheme is
employed.
THE SYSTEM MODEL
A stabilized system model for a terrain has been proposed. The state
vector is
xi - [di, gijT (Al)
where di indicates the i-th range and gi the i-th gradient (or slope). A
change of slope is modelled by the presence of an unknown input, ui, which
adds to the gradient component of xi through the input matrix. The system
model is
x+l - Fix i + Bui (A2)
where I - - I I - -Ibi 1-c 10
Fi-i I and B- Io qi I Il
I_ _I I__
20

where bi and qi are the time variant parameters and c is a small non-negative
real number necessary for system stability while scanning inward from
skylines. The measurement equation is
zi+ 1 = Hxt+l + vl+ (A3)
where H - [1,0] and vi+ 1 is zero mean Gaussian noise where
0 for all i JE{vivJ) - (A4)
o2 for all i J
Our problem, then, is to detect any small nonzero inputs ui, since
they represent a change in slope.
As in the Laplacian Method, a sufficient statistic is necessary to detect
the change of slopes. This sufficient statistic is called the residue, ri+2,
as
ri+2 = zi+2 - HFi+lx*i+1 (A5)
where x*i+1 is optimal estimate of xi+1 given zi+l, zi,...,zl. It can be
shown that
E(ri+l} - HFi+iBui
= (1-c)ui ui (A6)
21

A
*1
I
'I
1q~*h.
S
I'

TECHNICAL REPORT INTERNAL DISTRIBUTION LIST
NO. OFCOPIES
CHIEF,* DEVELOPMENT ENGINEERING BRANCHATTN: SMCAR-CCB-D 1
-DA 1-DP 1-DR 1-DS (SYSTEMS) 1-DS (ICAS GROUP) 1-DC 1-DM 1
CHIEF, ENGINEERING SUPPORT BRANCHATTN: SMCAR-CCB-S 1
-SE I
CHIEF, RESEARCH BRANCHATTN: SMCAR-CCB-R 2
-Rt (ELLEN FOGARTY) I-RA I-RH I-RP 1-RT I
TECHNICAL LIBRARY 5ATTN: SNCAR-CCB-TL
TECHNICAL PUBLICATIONS & EDITING UNIT 2ATTN: SNCAR-CCB-TL
DIRECTOR, OPERATIONS DIRECTORATE 1
DIRECTOR, PROCUREMENT DIRECTORATE I
DIRECTOR, PRODUCT ASSURANCE DIRECTORATE I
NOTE: PLEASE NOTIFY DIRECTOR, BENET WEAPONS LABORATORY, ATTN: SNCAR-CCB-TL,OF ANY ADDRESS CHANGES.

TECHNICAL REPORT EXTERNAL DISTRIBUTION LIST
NO. OF NO. OFCOPIES COPIES
ASST SEC OF THE ARMY COMMANDER
RESEARCH & DEVELOPMENT US ARMY AMCCOMATTN: DEP FOR SCI & TECH 1 ATTN: SMCAR-ESP-LTHE PENTAGON ROCK ISLAND, IL 61299WASHINGTON, D.C. 20315
COMMANDER
COMMANDER ROCK ISLAND ARSENAL
DEFENSE TECHNICAL INFO CENTER ATTN: SMCRI-ENK (HAT SCI DIV)ATTN: DTIC-DDA 12 ROCK ISLAND, IL 61299
CAMERON STATIONALEXANDRIA, VA 22314 DIRECTOR
US ARMY INDUSTRIAL BASE ENG ACTVCOMMANDER ATTN: DRXIB-MUS ARMY MAT DEV & READ COMD ROCK ISLAND, IL 61299ATTN: DRCDE-SG 15001 EISENHOWER AVE COMMANDERALEXANDRIA, VA 22333 US ARMY TANK-AUTMV R&D COMD
ATTN: TECH LIB - DRSTA-TSLCOMMANDER WARREN, MI 48090ARMAMENT RES & DEV CTRUS ARMY AMCCOM COMMANDERATTNt SMCA-FS I US ARMi TANK-AUTKV CORD
SMCAR-FSA 1 ATTN: DRSTA-RCSMCAR-FSM I WARREN, MI 48090SMCAR-FSS ISMCAR-AEE 1 COMMANDERSMCAR-AES I US MILITARY ACADEMYSMCAR-AET-O (PLASTECH) I ATTN: CHMN, MECH ENGR DEPTSMCAR-MSI (STINFO) 2 WEST POINT, NY 10996
DOVER, NJ 07801US ARMY MISSILE CONI)
DIRECTOR REDSTONE SCIENTIFIC INFO CTR 2BALLISTICS RESEARCH LABORATORY ATTN: DOCUMENTS SECT, BLDG. 4484ATTN: AHVBR-TSB-S (STINFO) 1 REDSTONE ARSENAL, AL 35898ABERDEEN PROVING GROUND, MD 21005
COMMANDER
MATERIEL SYSTEMS ANALYSIS ACTV US ARMY FGN SCIENCE & TECH CTRATTN: DRXSY-MP ATTN: DRXST-SDABERDEEN PROVING GROUND, MD 21005 1 220 7TH STREET, N.E.
CHARLOTTESVILLE, VA 22901
NOTE: PLEASE NOTIFY COMMANDER, ARMAMENT RESEARCH AND DEVELOPMENT CENTER,US ARMY AMCCOM, ATTN: SENET WEAPONS LABORATORY, SICAR-CCB-TL,WATERVLIET, NY 12189, OF ANY ADDRESS CHANGES.

TECHNICAL REPORT EXTERNAL DISTRIBUTION LIST (CONT'D)
NO. OF NO. OFCOPIES COPIES
COMMANDER DIRECTORUS ARMY LABCON US NAVAL RESEARCH LABMATERIALS TECHNOLOGY LAB 2 ATTN: DIR, NECH DIV IATTN: SLCMT-IML CODE 26-27, (DOC LIB) 1WATERTOWN, MA 01272 WASHINGTON, D.C. 20375
COMMANDER COMMANDERUS ARMY RESEARCH OFFICE AIR FORCE ARMAMENT LABORATORYATTN: CHIEF, IPO 1 ATTN: AFATL/DLJ 1P.O. BOX 12211 AFATL/DLJG 1RESEARCH TRIANGLE PARK, NC 27709 EGLIN AFB, FL 32542
COMMANDER METALS & CERAMICS INFO CTR
US ARMY HARRY DIAMOND LAB BATTELLE COLUMBUS LAB I
ATTN: TECH LIB 1 505 KING AVENUE2800 POWDER MILL ROAD COLUMBUS, OH 43201ADELPHIA, MD 20783
a ,COMMANDERNAVAL SURFACE WEAPONS CTRATTN: TECHNICAL LIBRARY
CODE X212OAHLGREN, VA 22448
a
NOTE: PLEASE NOTIFY COMMANDER, ARMAMENT RESEARCH AND DEVELOPMENT CENTER,US ARMY AMCCOM, ATTN: BENET WEAPONS LABORATORY, SMCAR-CCB-TL,WATERVLIET, NY 12189, OF ANY ADDRESS CHANGES.

4